Изобретение относится к области систем, которые измеряют параметры движения спортсменов. Известен ряд систем такого рода.
Так, например, известна система по патенту США №6464622, 2002 г. для тренировок боксера. Эта система содержит тренировочную грушу, на которой установлены датчики контакта. В состав устройства входит блок измерения скорости удара.
Известна также система обучения и измерения параметров движения фигуриста при выполнении сложнокоординационных двигательных действий вращательного характера авторов Мишина А.Н. и Шапиро В.А., РЕШЕНИЕ О ВЫДАЧЕ патента на изобретение по заявке №2003102213.
В состав этой системы входит датчик угловой скорости, построенный на линейном акселерометре, установленном на фигуристе так, что его ось чувствительности перпендикулярна оси вращения фигуриста при выполнении им многооборотного прыжка. Акселерометр измеряет центростремительное ускорение, которое при знании расстояния от точки установки акселерометра до оси вращения может быть пересчитано в блоке расчета угловой скорости в угловую скорость вращения фигуриста.
По сути, датчик угловой скорости, входящий в состав системы, состоит из двух блоков - акселерометра и блока расчета угловой скорости.
В состав системы также входят датчик группировки, блок определения длительности группировки, блок определения длительности прыжка, блок звуковой индикации.
Эта система принята в качестве прототипа настоящего изобретения.
Недостатком такой системы, содержащей датчик угловой скорости на линейном акселерометре и блоке расчета угловой скорости, является необходимость знания расстояния от точки установки акселерометра до оси вращения фигуриста. Это расстояние у разных фигуристов разное. Поэтому данный датчик сложно использовать на практике, т.к. требуется с высокой точностью измерять эти расстояния и вводить их в блок расчета параметров вращения каждый раз при использовании датчика угловой скорости различными фигуристами.
Кроме того, в системе прототипа не определяется начало и конец измерения угловой скорости при прыжке, что также может приводить к погрешностям. При анализе угловой скорости вращения важно знать ее различные фазы прыжка - от момента отрыва конька от льда до момента группировки, в течение длительности группировки и от момента разгруппировки до момента касания льда коньком.
В прототипе такой разбивки измененной угловой скорости на фазы не происходит.
Недостатком системы прототипа является необходимость размещения всей аппаратуры на фигуристе. Это не позволяет использовать предлагаемую систему в реальном времени. Также в прототипе отсутствует возможность архивации параметров вращательного движения.
Задачей заявленного изобретения является создание системы, в которой указанные недостатки устранены.
Технический результат, заключающийся в устранении указанных недостатков в системе измерения параметров вращательного движения фигуриста, содержащей датчик угловой скорости, датчик контакта конька со льдом, блок определения длительности прыжка, датчик группировки, блок определения длительности группировки, блок звуковой индикации, достигается тем, что система имеет блок расчета параметров вращательного движения и блок индикации параметров вращательного движения, при этом выходы одноосного гироскопического датчика угловой скорости, закрепленного на фигуристе так, что его ось чувствительности параллельна продольной оси корпуса фигуриста, блока измерения длительности прыжка и блока измерения длительности группировки соединены с блоком расчета параметров вращательного движения, выход которого соединен с блоком индикации параметров вращательного движения. Датчик контакта конька со льдом выполнен в виде линейного акселерометра, который закреплен на фигуристе так, что его ось чувствительности параллельна продольной оси корпуса фигуриста.
В нее введены радиопередающее и радиоприемное устройства, при этом одноосный гироскопический датчик угловой скорости, датчик группировки и датчик контакта конька со льдом соединены с радиопередающим устройством, а блок расчета параметров вращательного движения, блок определения длительности группировки и блок определения длительности прыжка соединены с радиоприемным устройством. В ее состав введен блок архивации измерений, соединенный с блоком расчета параметров вращательного движения и блоком индикации параметров вращательного движения. Она имеет блок контроля параметров вращательного движения и соединенный с ним блок ввода требуемого значения параметра вращательного движения, при этом выход блока расчета параметров вращательного движения соединен с входом блока контроля параметров вращательного движения, выход которого соединен с блоком звуковой индикации.
На фиг.1-6 дана система измерения параметров вращательного движения фигуриста:
1 - фигурист,
2 - одноосный гироскопический датчик угловой скорости,
3 - ось чувствительности одноосного гироскопического датчика угловой скорости,
4 - продольная ось корпуса фигуриста,
5 - блок расчета параметров вращательного движения,
6 - блок индикации,
7 - датчик контакта конька со льдом,
8 - блок определения длительности прыжка,
9 - датчик группировки,
10 - блок звуковой индикации,
11 - блок определения длительности группировки,
12 - линейный акселерометр,
13 - ось чувствительности линейного акселерометра,
14 - радиопередающее устройство,
15 - радиоприемное устройство,
16 - блок архивации параметров вращательного движения,
17 - блок контроля параметров вращательного движения,
18 - блок ввода требуемого значения параметра,
19 - блок расчета высоты прыжка.
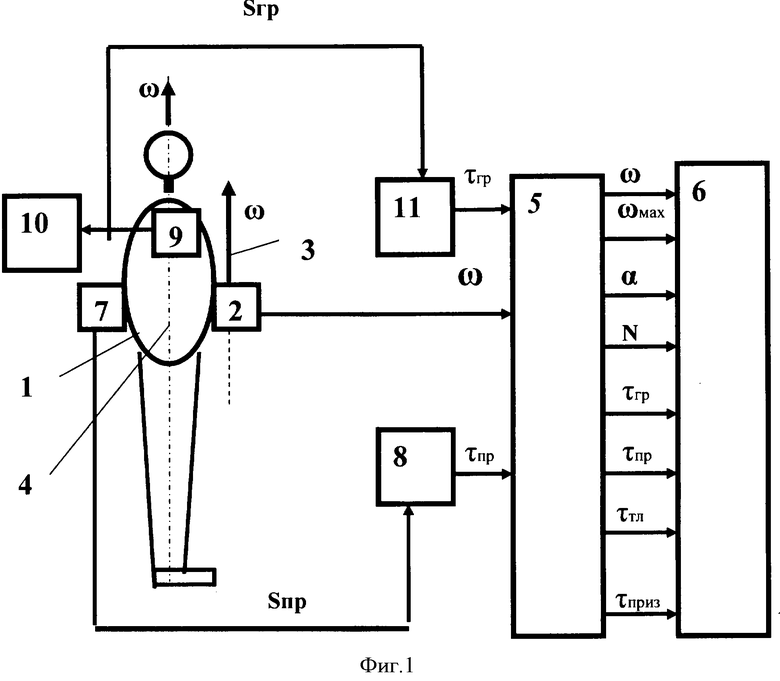
На фиг.1 изображен фигурист 1, на котором закреплен одноосный гироскопический датчик угловой скорости 2. Этот прибор установлен так, что его ось чувствительности 3 при выполнении многооборотного прыжка параллельна продольной оси фигуриста 4. Одноосный гироскопический прибор 2 соединен с блоком расчета параметров вращательного движения 5, который соединен с блоком индикации 6.
На фигуристе также установлен датчик контакта конька со льдом 7, который соединен с блоком определения длительности прыжка 8. Блок определения длительности прыжка 8 соединен с блоком расчета параметров вращательного движения 5.
На фигуристе 1 установлен датчик группировки 9, соединенный с блоком звуковой индикации 10 и блоком определения длительности группировки 11, который соединен с блоком расчета параметров вращения 5.
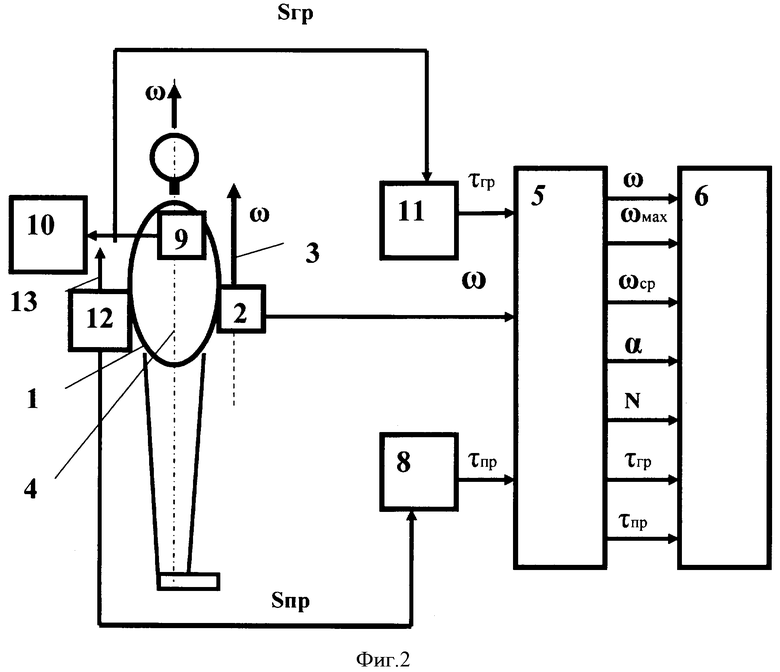
На фиг.2 показана система измерения параметров вращательного движения фигуриста с датчиком контакта конька со льдом, выполненным в виде линейного акселерометра 12, который закреплен на фигуристе так, что его ось чувствительности 13 параллельна продольной оси 4 корпуса фигуриста. Акселерометр 12 соединен с блоком определения длительности прыжка 8.
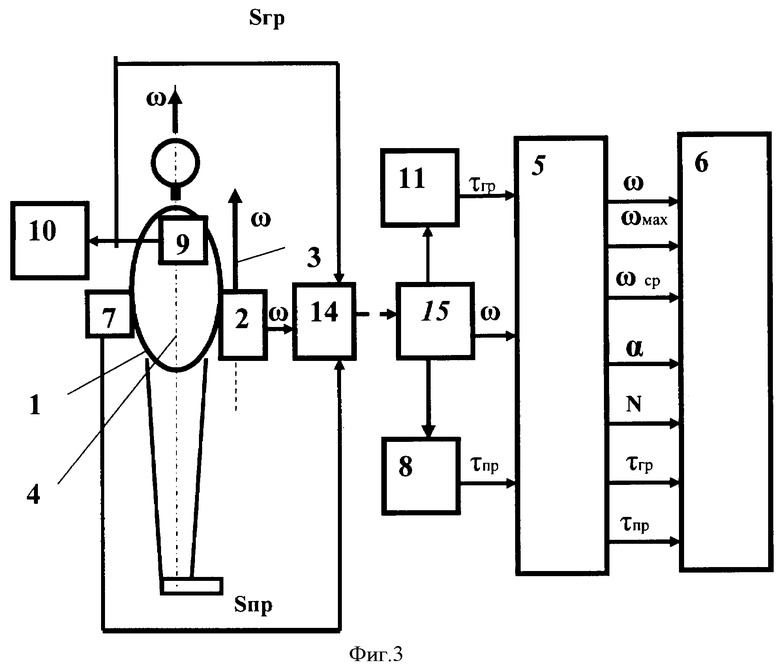
На фиг.3 изображен фигурист 1, на котором закреплено радиопередающее устройство 14, соединенное с одноосным гироскопическим датчиком угловой скорости 2, датчиком контакта конька со льдом 7 и датчиком группировки 9.
В состав системы также введено радиоприемное устройство 15, соединенное с блоком расчета параметров вращательного движения 5, с блоком определения длительности прыжка 8 и с блоком определения длительности группировки 11.
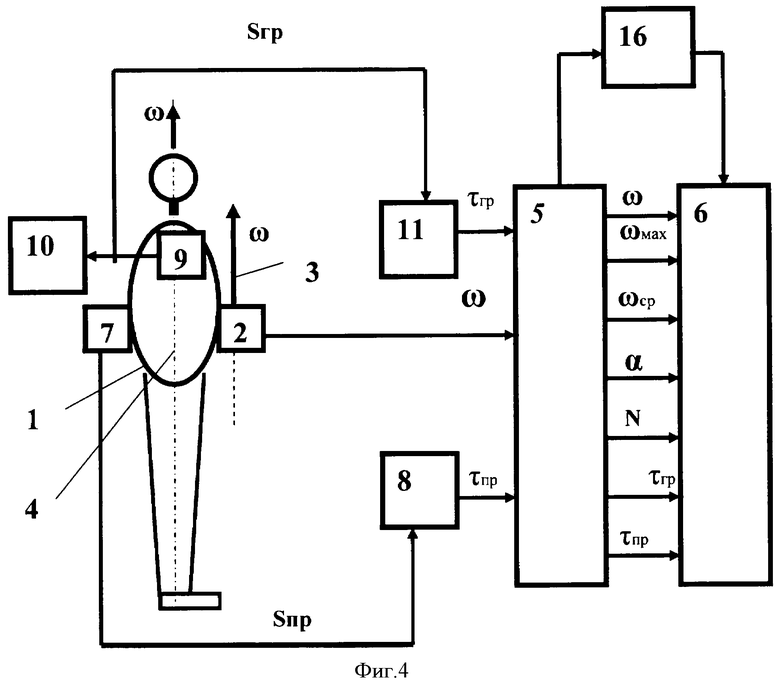
На фиг.4 изображена система измерения параметров вращательного движения фигуриста, в которую введен блок архивации параметров вращательного движения 16. Этот блок соединен с блоком расчета параметров вращательного движения 5 и блоком индикации 6.
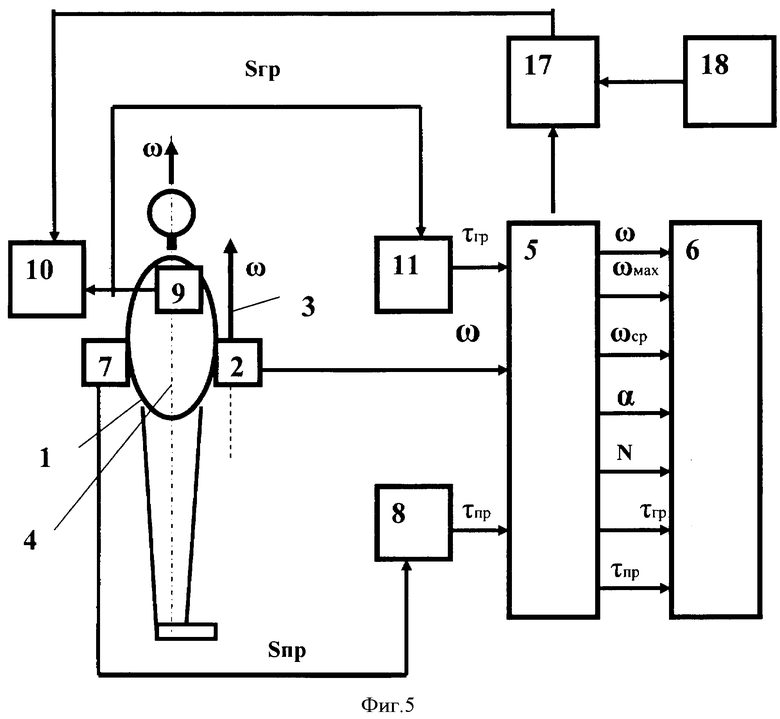
На фиг.5 изображена система измерения параметров вращательного движения фигуриста, в которую введены блок контроля параметров вращательного движения 17 и блок ввода требуемого значения параметра вращательного движения 18.
Блок контроля параметров вращательного движения 17 соединен с блоком ввода требуемого значения параметра вращательного движения 18 и с блоком расчета параметров вращательного движения 5. Выход блока 17 соединен с блоком звуковой индикации 10.
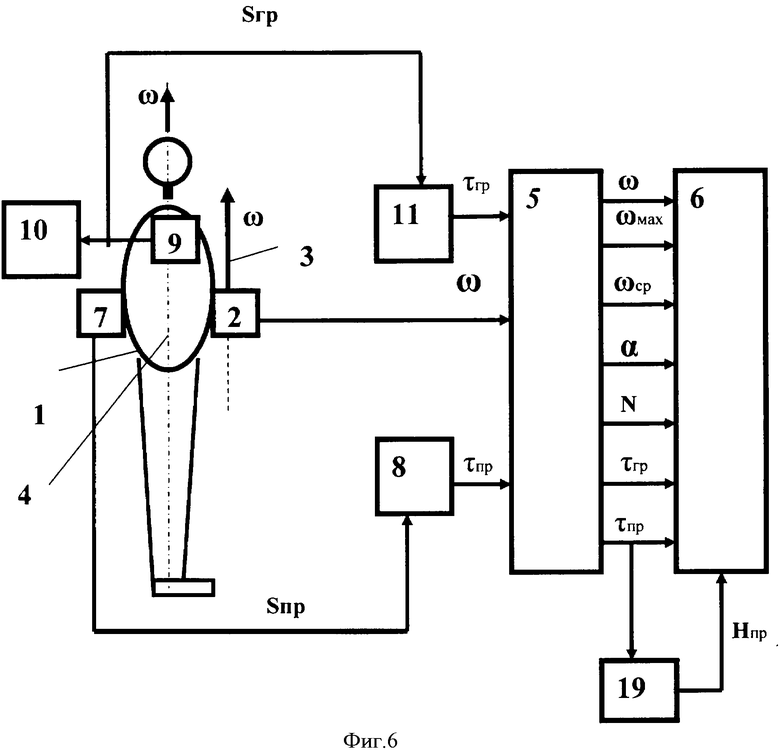
На фиг.6 изображена система измерения параметров вращательного движения фигуриста, в которую введен блок расчета высоты 19 многооборотного прыжка. Вход блока соединен с выходом блока расчета параметров вращательного движения 5, а выход - с входом блока индикации 6.
Система работает следующим образом.
При выполнении фигуристом 1 прыжка вокруг продольной оси корпуса 4 (фиг.1) гироскопический датчик угловой скорости 2, ось чувствительности которого параллельна продольной оси 4, измеряет угловую скорость вращения фигуриста ω. Измеренные значения скорости передаются в блок расчета параметров вращательного движения 5.
В начале прыжка датчик контакта конька со льдом 7 выдает сигнал об отрыве фигуриста от льда. Этот сигнал поступает в блок определения длительности прыжка 8. При приземлении датчик 7 вновь выдает сигнал о контакте конька со льдом, который также поступает в блок определения длительности прыжка 8. В блоке 8 по двум временным меткам начала и окончания прыжка определяется длительность прыжка - τпр. Начальная и конечная временные метки и значение τпр передаются в блок расчета параметров вращательного движения 5.
При совершении прыжка фигурист совершает группировку. Датчик группировки 9 выдает сигнал начала и окончания группировки в блок определения длительности группировки 10, в котором формируется значение длительности группировки - τгр Начальная и конечная временные метки группировки и значение τгр передаются в блок расчета параметров вращательного движения 5.
Таким образом, в блоке расчета параметров вращательного движения 5 фигуриста 1 поступает следующая информация:
- угловая скорость вращения ω фигуриста вокруг продольной оси;
- временные метки начала и окончания прыжка;
- длительность прыжка - τпр;
- временные метки начала и окончания группировки;
- длительность группировки - τгр;
В блоке расчета параметров вращательного движения 5 по этой информации фиксируются и рассчитываются параметры вращательного движения в следующих фазах выполнения многооборотного прыжка:
1. Фаза толчка. Угловая скорость вращения фигуриста от нулевого значения до момента толчка (отрыва) фигуриста от льда.
2. Фаза полета. Угловая скорость вращения фигуриста от момента отрыва ото льда до момента касания льда. Внутри фазы полета определяется фаза группировки - угловая скорость вращения фигуриста от момента начала группировки до ее окончания.
3. Фаза приземления. Угловая скорость вращения фигуриста от момента касания льда до нулевого значения.
В блоке 5 определяются следующие параметры:
- максимальная угловая скорость - ωмах;
- угол поворота фигуриста в полете -α=ω×τпр;
- количество оборотов - N=α:360°;
- длительность фазы полета - τпр;
- длительность группировки - τгр;
- длительность фазы толчка - τтл;
- длительность фазы приземления - τприз.
Эти параметры передаются на блок индикации 6 для наблюдения и анализа тренером и спортсменом.
Оперативное знание этих параметров в реальном времени позволяет тренеру более эффективно корректировать технику выполнения прыжка фигуристом, а фигуристу значительно быстрее овладевать многооборотными прыжками.
Определение момента отрыва конька ото льда и момента касания коньком льда после прыжка с помощью акселерометра 12, установленного на фигуристе 1 (фиг.2) основано на том, что для совершения прыжка фигурист должен оттолкнуться от льда, чтобы преодолеть силу земного притяжения. В момент толчка возникнет сигнал акселерометра, пропорциональный силе толчка. Этот сигнал характеризует момент начала прыжка. В момент касания конька со льдом после окончания полета также возникнет скачок в сигнале акселерометра вследствие удара фигуриста об лед. Этот сигнал будет характеризовать момент окончания прыжка. Знание моментов начала и окончания прыжка позволяет вычислить длительность прыжка τпр в блоке определения длительности прыжка 8.
Использование линейного акселерометра в качестве датчика контакта конька со льдом удобно с эксплуатационной точки зрения, так как акселерометр может быть размещен на фигуристе в любом удобном месте, вследствие чего не требуется протяжки длинных линий связи по одежде фигуриста.
На фиг.3 изображена система измерения параметров вращательного движения фигуриста, в которую введены блоки для передачи данных от одноосного гироскопического датчика 2 на блок расчета параметров вращательного движения 5 по беспроводной линии связи.
Сигнал с одноосного гироскопического датчика угловой скорости 2 поступает на радиопередающее устройство 14, в котором преобразуется в радиосигнал и передается на радиоприемное устройство 15. С радиоприемного устройства 15 сигнал об угловой скорости вращения поступает в блок расчета параметров вращательного движения 5.
По радиоканалу также передается сигнал Sпp с датчика контакта конька со льдом 7 и сигнал Sгp с датчика группировки 9. Эти сигналы поступают на радиопередающее устройство 14, преобразуются в радиосигнал и в виде радиосигнала передаются на радиоприемное устройство 15, где преобразуются в электрический сигнал и далее передаются соответственно в блоки определения длительности прыжка 8 и длительности группировки 11. В блоках 8 и 11 соответственно вырабатываются временные метки начала и окончания прыжка и начала и окончания группировки, а также длительность прыжка τпр и длительность группировки τгр, которые затем поступают в блок расчета параметров вращательного движения 5, в котором формируются параметры вращательного движения фигуриста.
Введение радиоканала передачи данных в систему измерения параметров вращательного движения фигуриста позволяет снизить массу и габариты носимой фигуристом аппаратуры и получать информацию о параметрах вращения в реальном масштабе времени.
На фиг.4 показана система измерения параметров вращательного движения фигуриста с блоком архивации 16. Информация, которая формируется в блоке расчета параметров вращательного движения 5, поступает в блок архивации 16, в котором накапливается и хранится. В случае необходимости эта информация может быть извлечена из памяти блока и передана для визуализации на блок индикации 6.
Возможность архивации данных важна для анализа динамики изменения результатов фигуриста в процессе освоения многооборотных прыжков.
На фиг.5 изображена система измерения параметров вращательного движения фигуриста, в которую тренер может вводить задания для фигуриста и система автоматически будет определять результат и контролировать их выполнение.
Тренер вводит задание в систему с помощью блока ввода требуемого значения параметра 17. В систему может быть введено требуемое значение любого параметра, который сама система вырабатывает, например требуемое значение угловой скорости. В блок контроля параметров вращательного движения 18 поступают фактическая угловая скорость ωф из блока 5, которую развил фигурист при прыжке, и требуемое значение скорости ωтp, которую задал тренер и которую должен воспроизвести фигурист. Рассогласование скоростей выводится на блок индикации 6.
В случае если прыжок нерезультативный, т.е. фигурист не развил требуемой скорости, сигнал рассогласования выводится на блок звуковой индикации. В этом случае фигурист в реальном времени, без помощи тренера имеет информацию о результатах прыжка и может самостоятельно предпринимать корректирующие действия при совершении следующих прыжков. Применение блока звуковой индикации для обучения фигуриста описано авторами данного изобретения в заявке №2003102213.
На фиг.6 показана система измерения параметров вращательного движения с блоком расчета высоты полета 19.
Из законов физики известно, что если тело падает с некоторой высоты вблизи земли и известна длительность полета тела, то высота Н, с которой падает тело, может быть определена по формуле Н=g×t2/2, где g - ускорение свободного падения, равное 980 см/сек2, a t - длительность падения тела.
Так как система измерения параметров вращательного движения вырабатывает длительность прыжка фигуриста τпр, то длительность падения фигуриста с высоты Н при совершении многооборотного прыжка будет равна τпр/2 и высота прыжка определится формулой Н=g×τпр2/8.
В блоке 19 по приведенной формуле рассчитывается высота прыжка фигуриста. Расчетное значение высоты прыжка поступает на блок индикации 6.
Результаты сравнения экспериментальных замеров высоты прыжка с расчетными показали точность расчета во втором знаке после запятой.
Предлагаемое изобретение позволяет:
- с высокой точностью измерять параметры вращательного движения фигуриста при выполнении многооборотных прыжков в разных его фазах - от момента отрыва до момента группировки, в течение длительности группировки и от момента разгруппировки до момента касания льда коньком;
- быстрее обучать фигуриста технике правильного выполнения прыжка за счет введения оперативной обратной связи по результату прыжка.
Предлагаемая система может быть реализована на современных элементах микромеханической гироскопической техники, микропроцессорной техники, а также средствах беспроводной связи типа Bluetooth или WI-FI.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБУЧЕНИЯ И ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ФИГУРИСТА ПРИ ВЫПОЛНЕНИИ СЛОЖНОКООРДИНАЦИОННЫХ ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ВРАЩАТЕЛЬНОГО ХАРАКТЕРА | 2003 |
|
RU2319531C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ МНОГООБОРОТНОГО ПРЫЖКА | 2008 |
|
RU2399403C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩАТЕЛЬНОГО И ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ФИГУРИСТОВ В ПАРНОМ КАТАНИИ | 2011 |
|
RU2492898C2 |
| СПОСОБ ЭЛЕКТРОННОГО КОНТРОЛЯ АМОРТИЗАЦИИ ПРИЗЕМЛЕНИЯ ФИГУРИСТА ПОСЛЕ ПРЫЖКА | 2011 |
|
RU2466763C1 |
| СИСТЕМА МОНИТОРИНГА ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ИГРОКОВ ФУТБОЛЬНОЙ КОМАНДЫ | 2008 |
|
RU2399400C2 |
| СПИННЕР ФИГУРИСТА | 2017 |
|
RU2753641C2 |
| ЭЛЕКТРИЧЕСКИЙ УТЮГ | 2006 |
|
RU2360054C2 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
Система измерения параметров вращательного движения фигуриста содержит датчик угловой скорости, датчик контакта конька со льдом, блок определения длительности прыжка, датчик группировки, блок определения длительности группировки, блок звуковой индикации. Система имеет блок расчета параметров вращательного движения и блок индикации параметров вращательного движения, выходы одноосного гироскопического датчика угловой скорости, который закреплен на фигуристе так, что его ось чувствительности параллельна продольной оси корпуса фигуриста, блока измерения длительности прыжка и блока измерения длительности группировки соединены с блоком расчета параметров вращательного движения, выход которого соединен с блоком индикации параметров вращательного движения. Использование данного изобретения позволяет использовать систему в реальном времени с возможностью архивации параметров вращательного движения. 4 з.п. ф-лы, 6 ил.
1. Система измерения параметров вращательного движения фигуриста, содержащая датчик угловой скорости, датчик контакта конька со льдом, блок определения длительности прыжка, датчик группировки, блок определения длительности группировки, блок звуковой индикации, отличающаяся тем, что система имеет блок расчета параметров вращательного движения и блок индикации параметров вращательного движения, при этом выходы одноосного гироскопического датчика угловой скорости, закрепленного на фигуристе так, что его ось чувствительности параллельна продольной оси корпуса фигуриста, блока измерения длительности прыжка и блока измерения длительности группировки соединены с блоком расчета параметров вращательного движения, выход которого соединен с блоком индикации параметров вращательного движения.
2. Система по п.1, отличающаяся тем, что датчик контакта конька со льдом выполнен в виде линейного акселерометра, который закреплен на фигуристе так, что его ось чувствительности параллельна продольной оси корпуса фигуриста.
3. Система по п.1, отличающаяся тем, что в нее введены радиопередающее и радиоприемное устройства, при этом одноосный гироскопический датчик угловой скорости, датчик группировки и датчик контакта конька со льдом соединены с радиопередающим устройством, а блок расчета параметров вращательного движения, блок определения длительности группировки и блок определения длительности прыжка соединены с радиоприемным устройством.
4. Система по п.1, отличающаяся тем, что в ее состав введен блок архивации измерений, соединенный с блоком расчета параметров вращательного движения и блоком индикации параметров вращательного движения.
5. Система по п.1, отличающаяся тем, что она имеет блок контроля параметров вращательного движения и соединенный с ним блок ввода требуемого значения параметра вращательного движения, при этом выход блока расчета параметров вращательного движения соединен с входом блока контроля параметров вращательного движения, выход которого соединен с блоком звуковой индикации.
| RU 2003102213 А, 10.08.2006 | |||
| РОТОМЕТР | 2001 |
|
RU2215467C2 |
| СПОСОБ КОНТРОЛЯ И АНАЛИЗА БИОМЕХАНИЧЕСКИХ ПАРАМЕТРОВ СПОРТСМЕНОВ | 2003 |
|
RU2233685C1 |
| Машина для непрерывного литья | 1939 |
|
SU67460A1 |
| WO 2005074369 А2, 18.08.2005 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

