Предлагаемая система относится к сейсмической и акустической разведке районов, покрытых водой, а именно к системам предупреждения о волнах цунами, возникающих вследствие подъема или опускания значительных водных масс океана.
Известны способы и системы для определения возникновения волн цунами (авт. свид. СССР №№568.922, 769.455, 1.070.497, 1.584.585, 1.676.651, 1.721.563; патенты РФ №№2.030.789, 2.034.312, 2.041.476, 2.068.185, 2.093.861, 2.097.792, 2.168.747, 2.201.599, 2.240.570; патенты США №№3.943.514, 4.126.203, 5.124.651, 5.696.514; Бреховских Л.М. О цунами и наблюдениях над сверхдальним распространением звука в океане. - Бюлл. Совета по сейсмологии АН СССР, 1956, №2, с.8-11; Дыхан Б.Д. и др. Первая регистрация цунами в океане (цунами 23.02.80 у Южных Курильских островов). Доклады АН, т.257, №5, 1981, с.1088-1092 и другие).
Из известных систем наиболее близкой к предлагаемой является система, реализующая «Способ определения колебаний водной поверхности определения колебаний водной поверхности» (Авт. свид. СССР №1.070.497, G01V 1/38, 1982), которая и выбрана в качестве прототипа.
Указанная система обеспечивает прогноз распространения волн цунами за счет получения информации о начальном смещении поверхности океана, но не позволяет достоверно определять колебания водной поверхности.
Технической задачей изобретения является повышение достоверности определения колебаний водной поверхности путем определения эпицентра цунами и использования сложных сигналов с фазовой манипуляцией для передачи тревожного сообщения на пункт контроля.
Поставленная задача решается тем, что система для определения колебаний водной поверхности, содержащая микробарографы, расположенные в виде разветвленной системы вдоль береговой линии и подключенные через схему сравнения к системе оповещения, снабжена блоком памяти, пунктом контроля и двумя корреляторами, каждый из которых состоит из последовательно подключенных к одному из крайних микробарографов перемножителя, второй вход которого через регулируемую линию задержки соединен с выходом другого крайнего микробарографа, фильтра нижних частот, экстремального регулятора и регулируемой линии задержки, второй выход которого является выходом коррелятора, система оповещения выполнена в виде последовательно подключенных к выходу схемы сравнения первого ключа, второй вход которого через первый преобразователь аналог-код соединен с выходом первого коррелятора, формирователя модулирующего кода, третий вход которого соединен с выходом схемы сравнения, фазового манипулятора, второй вход которого соединен с выходом задающего генератора, усилителя мощности и передающей антенной, последовательно подключенных к выходу второго коррелятора второго преобразователя аналог-код и второго ключа, второй вход которого соединен с выходом схемы сравнения, а выход подключен к второму входу формирователя модулирующего кода, пункт контроля выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, смесителя, второй вход которого соединен с выходом гетеродина, усилителя промежуточной частоты, первого переменожителя, второй вход которого соединен с выходом фильтра нижних частот, узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом усилителя промежуточной частоты, фильтра нижних частот и блока регистрации и анализа, второй вход схемы сравнения соединен с выходом блока памяти, микробарографы разнесены на фиксированное расстояние d, две пары крайних микробарографов разнесены на фиксированное расстояние nd, где n - количество микробарографов.
Структурная схема системы для определения колебаний водной поверхности представлена на фиг.1. Временные диаграммы, поясняющие работу системы, изображены на фиг.2.
Система содержит приемники 1.i (i=1, 2,..., n) колебаний атмосферного давления (микробарографы), расположенные в виде разветвленной системы вдоль береговой линии и подключенные через схему 2 сравнения к системе 3 оповещения, пункт контроля 7, два коррелятора 5 и 6, каждый из которых состоит из последовательно подключенных к одному из крайних микробарографов 1.1 (1.n) перемножителя 5.1 (6.1), второй вход которого через регулируемую линию задержки 5.4 (6.4) соединен с выходом другого крайнего микробарографа 1.2 (1.n-1), фильтра нижних частот 5.2 (6.2) экстремального регулятора 5.3 (6.3) и регулируемой линии задержки 5.4 (6.4), второй выход которого является выходом коррелятора 5 (6).
Система 3 оповещения выполнена в виде последовательно подключенных к выходу схемы 2 сравнения первого ключа 3.3, второй вход которого через первый преобразователь 3.1 аналог-код соединен с выходом первого коррелятора 5, формирователь 3.5 модулирующего кода, третий вход которого соединен с выходом схемы 2 сравнения, фазового манипулятора 3.7, второй вход которого соединен с выходом задающего генератора 3.6, усилителя 3.8 мощности и передающей антенны 3.9, последовательно подключенных к выходу второго коррелятора 6 преобразователя 3.2 аналог-код и второго ключа 3.4, второй вход которого соединен с выходом схемы 2 сравнения, а выход подключен к второму входу формирователя 3.5 модулирующего кода.
Пункт 7 контроля выполнен в виде последовательно включенных приемной антенны 7.1, усилителя 7.2 высокой частоты, смесителя 7.4, второй вход которого соединен с выходом гетеродина 7.3, усилителя 7.5 промежуточной частоты, первого перемножителя 7.6, второй выход которого соединен с выходом фильтра 7.9 нижних частот, узкополосного фильтра 7.8. второго перемножителя 7.7, второй вход которого соединен с выходом усилителя 7.5 промежуточной частоты, фильтра 7.9 нижних частот и блока 7.10 регистрации и анализа.
Второй вход схемы 2 сравнения соединен с выходом блока 4 памяти, микробарографы разнесены на фиксированные расстояния d (измерительная база), две пары крайних микробарографов 1.1 и 1.2, 1.n и 1.n-1 разнесены на фиксированное расстояние nd, где n - количество микробарографов.
Предлагаемая система работает следующим образом.
Принцип определения колебаний водной поверхности заключается в следующем.
Период волн цунами заключен в интервале от 2 до 200 мин, длина волны составляет нескольких десятков до 300-400 км при высоте волн 1-2 м. Начальное возвышение поверхности океана в очаге зарождения волн цунами не превышает нескольких метров и зарегистрировать их распространение практически невозможно.
Однако в момент зарождения цунами область акватории радиуса R поднимается на высоту h над поверхностью океана - с частотами 0,001-0,5 Гц, что вызывает изменение атмосферного давления, которое можно зарегистрировать на расстоянии от очага цунами не менее 5 длин волн цунами, что определяется отношением последнего к шуму.
На больших по сравнению с радиусом R расстояниях эта система эквивалентна движению помещенной в жесткий экран мембраны, приводящему на расстоянии l>>R к изменению атмосферного давления

где V0 - скорость подъема водной массы;
α - угол между вектором точки наблюдения и вертикалью (азимут);
ρ - удельное давление;
С - скорость звука в атмосфере;
λ и k - соответственно длина волны и вектор излучения волны;
I1 - функция Бесселя первого порядка.
Собственные частоты колебаний системы лежат в пределах 0,001-0,5 Гц. Подставляя в формулу (1) ρ≈1,29*10-3·г/см3, С=330 м/с, ω=0,1 Гц, l=1000 км,  , πR2≈500 км2, получим для изменения давления ≈10-3÷10-4 бар.
, πR2≈500 км2, получим для изменения давления ≈10-3÷10-4 бар.
Чувствительность современных микробарографов значительно превосходит указанный интервал давлений, а частотный диапазон их позволяет регистрировать изменение давления с частотами собственных колебаний очага цунами.
Скорость распространения колебаний давления в атмосфере в среднем в два раза превышает скорость волн цунами. Поэтому на расстояниях порядка 1000 км разность времени прихода звукового импульса и гидродинамической волны составляет примерно 30 мин и может быть использована для предупреждения о возникновении дальних цунами.
Колебания атмосферного давления от эпицентра ЭЦ цунами принимаются двумя парами микробарографов 1.i (i=1, 2,..., n). Причем микробарографы разнесены на фиксированное расстояние d (измерительная база). Две пары крайних микробарографов разнесены на фиксированное расстояние nd, где n - количество микробарографов.
Колебания атмосферного давления (звуковые сигналы) с выходов крайних микробарографов поступают на два коррелятора 5 (6), каждый из которых состоит из перемножителя 5.1 (6.1), фильтра 5.2 (6.2) нижних частот, экстремального регулятора 5.3 (6.3) и регулируемой линии задержки 5.4 (6.4). Получаемая на выходе коррелятора 5 (6) взаимно-корреляционная функция R(τ1)[R(τ2)] имеет максимум при значении введенного регулируемого запаздывания
τ1=t1-t2, τ2=t3-t4,
где t1 и t2 - время прохождения звуковым сигналом расстояний от эпицентра цунами ЭЦ до первого 1.1 и второго 1.2 крайних микробарографов;
t3 и t4 - время прохождения звуковым сигналом расстояний от эпицентра цунами ЭЦ до второй пары крайних микробарографов соответственно.
Максимальные значения R(τ1) и R(τ2) поддерживаются с помощью экстремальных регуляторов 5.3 и 6.3, воздействующих на блоки 5.4 и 6.4 регулируемой задержки соответственно. Шкала блоков 5.4 и 6.4 регулируемой задержки градуируются непосредственно в значениях угловых координат эпицентра цунами ЭЦ


где τ1 и τ2 - введенные в соответствующие каналы задержки звуковых сигналов, соответствующие максимуму корреляционных функций.
Выходные сигналы корреляторов 5 и 6 максимальны, когда плоскости, в которых лежат микробарографы 1.1 и 1.2, 1.n-1 и 1.n, расположены перпендикулярно направлениям на эпицентр цунами ЭЦ (фиг.1).
Измеренные значения α1 и α2 в преобразователях 3.1 и 3.2 преобразуются в цифровые коды.
Осредненные зарегистрированные колебания атмосферного давления по группе приемников (микробарографов) определяют момент прихода первого экстремума выделенного сигнала, сравниваются в схеме 2 сравнения с эталонным сигналом, поступающим из блока 4 памяти. По результатам сравнения формируется постоянное напряжение, которое поступает на управляющие входы ключей 3.3 и 3.4, открывая их. В исходном состоянии ключи 3.3 и 3.4 всегда закрыты.
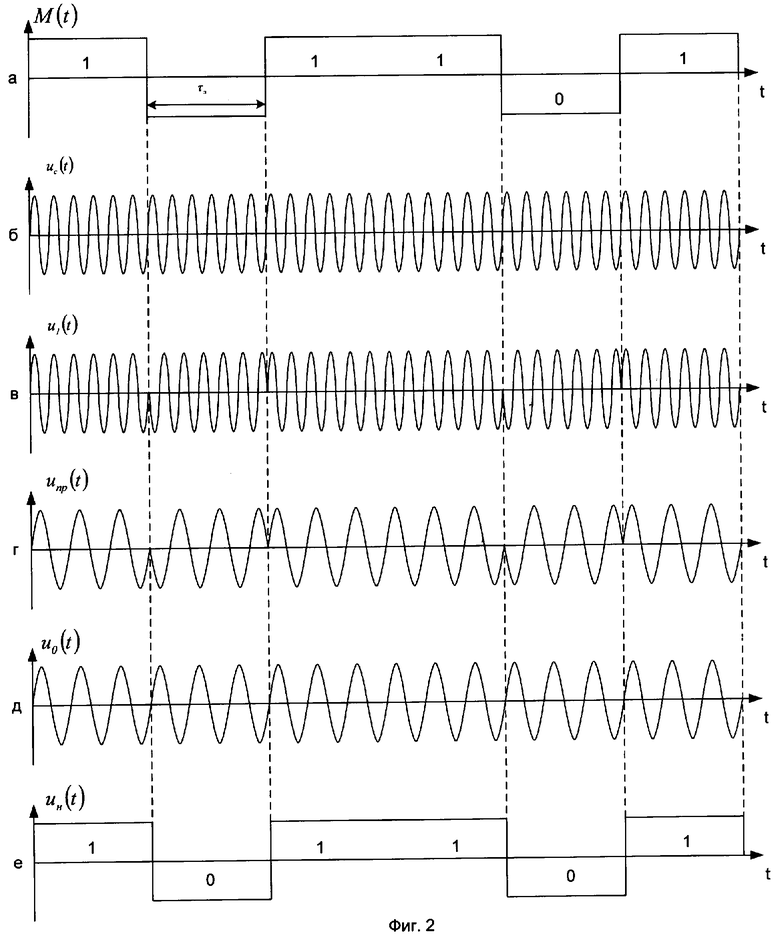
Значения азимутов α1 и α2 в цифровой форме с выходов преобразователей 3.1 и 3.2 аналог-код через открытые ключи 3.3 и 3.4 соответственно поступают на входы формирователя 3.5 модулирующего кода, где формируется модулирующий код M(t) (цифровое сообщение) (фиг.2.а), который поступает на первый вход фазового манипулятора 3.7, на второй вход которого подается высокочастотное колебание с выхода задающего генератора 3.6 (фиг.2, б)
Uc(t)=Vccos(ωct+ϕc), 0≤t≤Tc,
где Vc, ωc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
На выходе фазового манипулятора 3.7 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.2, в)
U1(t)=V1cos[ωct+ϕk(t)+ϕc], 0≤t≤Tc,
где ϕk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (фиг.2, а), причем ϕk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границе между элементарными посылками (К=1, 2,..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc(Тc=τэN),
который после усиления в усилителе 3.8 мощности излучается передающей антенной 3.9 в эфир, улавливается приемной антенной 7.1 пункта 7 контроля и через усилитель 7.2 высокой частоты поступает на первый вход смесителя 7.4. На второй вход смесителя 7.4 подается напряжение гетеродина 7.3
UГ(t)=VГcos(wГt+ϕГ).
На выходе смесителя 7.4 образуются напряжения комбинационных частот. Усилителем 7.5 выделяется напряжение промежуточной частоты (фиг.2, г)
UПР(t)=VПРcos[ωПРt+ϕk(t)+ϕПР], 0≤t≤Tc,
где 
K1 - коэффициент передачи смесителя;
ωПР=ωc-ωГ - промежуточная частота;
ϕПР=ϕс-ϕГ,
которое поступает на первые входы перемножителя 7.6 и 7.7. На второй вход перемножителя 7.7 подается опорное напряжение (фиг.2, д)
U0(t)=V0cos(ωПРt+ϕПР)
с выхода узкополосного фильтра 7.8. На выходе перемножителя 7.7 образуется низкочастотное напряжение (фиг.2, е)
UН(t)=VНcosϕк(t),
где 
К2 - коэффициент передачи перемножителя, пропорциональное модулирующему коду M(t) (фиг.2, а), которое выделяется фильтром 7.9 нижних частот и подается на второй вход перемножителя 7.6. На выходе последнего образуется гармоническое колебание
U0(t)=V2cos(ωПРt+ϕПР)+V2cos[ωПРt+2ϕk(t)+ϕПР)=V0cos(ωПРt+ϕПР),
где V0=2V2, 
которое используется в качестве опорного напряжения, выделяется узкополосным фильтром 7.8 и подается на второй вход перемножителя 7.7.
Низкочастотное напряжение UН(t) поступает на вход блока 7.10 регистрации и анализа, где определяется эпицентр цунами.
Перемножители 7.6 и 7.7, узкополосный фильтр 7.8 и фильтр 7.9 нижних частот образуют демодулятор ФМн-сигналов, который свободен от явления «обратной работы», что повышает достоверность выделения модулирующего кода M(t) из принимаемого ФМн-сигнала.
Следует отметить, что известным схемам Пистолькорса А.А., Сидорова В.И., Травина Г.А., Костаса Д.Ф., которые также выделяют опорное напряжение, необходимое для синхронного детектирования ФМн-сигналов, непосредственно из самого принимаемого ФМн-сигнала, присуще явление «обратной работы», которое ограничивает возможности этих устройств.
Эффективность предлагаемой системы можно оценить, сравнив резерв времени между цунамигенным процессом и приходом разрушительной волны к побережью. Так, на расстояниях порядка 1000 км от эпицентра время движения волны цунами порядка 100 мин, сейсмического возмущения ˜5 мин, звукового возмущения по подводному каналу ˜10 мин и по атмосферному каналу ˜50 мин, что достаточно для обеспечения мер по безопасности живой силы и техники.
Система позволяет также повысить достоверность прогноза за счет получения информации о начальном смещении поверхности океана.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение достоверности определения колебаний водной поверхности. Это достигается за счет определения эпицентра цунами и использования сложных сигналов с фазовой манипуляцией для передачи тревожной информации на пункт контроля.
Сложные сигналы с фазовой манипуляцией открывают новые возможности в технике передачи тревожных дискретных сообщений от микробарографов, расположенных в виде разветвленной системы вдоль береговой линии, на пункт контроля. Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сложные ФМн-сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
С точки зрения обнаружения сложные ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, чтобы в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГНОЗИРОВАНИЯ ВОЗМОЖНОСТИ ВОЗНИКНОВЕНИЯ ЦУНАМИ И ОПРЕДЕЛЕНИЕ ЕГО ЭПИЦЕНТРА | 2005 |
|
RU2300787C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОЛЕБАНИЙ ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2503980C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ОПАСНОСТИ ЦУНАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2288487C1 |
| СИСТЕМА ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ЗЕМЛЕТРЯСЕНИЯХ И ЦУНАМИ | 2005 |
|
RU2290671C1 |
| СПОСОБ КОНТРОЛЯ ПОДЛИННОСТИ И ПЕРЕМЕЩЕНИЯ АЛКОГОЛЬНОЙ ПРОДУКЦИИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538311C2 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2005 |
|
RU2291575C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2324957C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2007 |
|
RU2339972C1 |
| СИСТЕМА ДЛЯ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2005 |
|
RU2305302C2 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2313911C1 |
Изобретение относится к сейсмической и акустической разведке районов, покрытых водой, и может быть использовано для предупреждения о волнах цунами, возникающих вследствие подъема или опускания значительных водных масс океана. Сущность: система для определения колебаний водной поверхности содержит микробарографы, разнесенные на фиксированные расстояния вдоль береговой линии. Микробарографы подключены через схему сравнения к системе оповещения. Дополнительно система для определения колебаний водной поверхности снабжена блоком памяти, пунктом контроля и двумя корреляторами. Технический результат: повышение достоверности определения колебаний водной поверхности. 2 ил.
Система для определения колебаний водной поверхности, содержащая микробарографы, расположенные в виде разветвленной системы вдоль береговой линии и подключенные через схему сравнения к системе оповещения, отличающаяся тем, что она снабжена блоком памяти, пунктом контроля и двумя корреляторами, каждый из которых состоит из последовательно подключенных к одному из крайних микробарографов перемножителя, второй вход которого через регулируемую линию задержки соединен с выходом другого крайнего микробарографа, фильтра нижних частот, экстремального регулятора и регулируемой линии задержки, второй выход которого является выходом коррелятора, система оповещения выполнена в виде последовательно подключенных к выходу схемы сравнения первого ключа, второй вход которого через первый преобразователь аналог-код соединен с выходом первого коррелятора, формирователя модулирующего кода, третий вход которого соединен с выходом схемы сравнения, фазового манипулятора, второй вход которого соединен с выходом задающего генератора, усилителя мощности и передающей антенны, последовательно подключенных к выходу второго коррелятора, второго преобразователя аналог-код и второго ключа, второй вход которого соединен с выходом схемы сравнения, а выход подключен к второму входу формирователя модулирующего кода, пункт контроля выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, смесителя, второй вход которого соединен с выходом гетеродина, усилителя промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом фильтра нижних частот, узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом усилителя промежуточной частоты, фильтра нижних частот и блока регистрации и анализа, второй вход схемы сравнения соединен с выходом блока памяти, микробарографы разнесены на фиксированное расстояние d, две пары крайних микробарографов разнесены на фиксированное расстояние nd, где n - количество микробарографов.
| Способ определения колебаний водной поверхности | 1982 |
|
SU1070497A1 |
| US 4126203 A, 21.11.1978 | |||
| Способ измерения колебаний уровня водной поверхности | 1990 |
|
SU1765693A1 |
| Устройство для измерения волновых колебаний водной поверхности | 1975 |
|
SU877326A1 |

