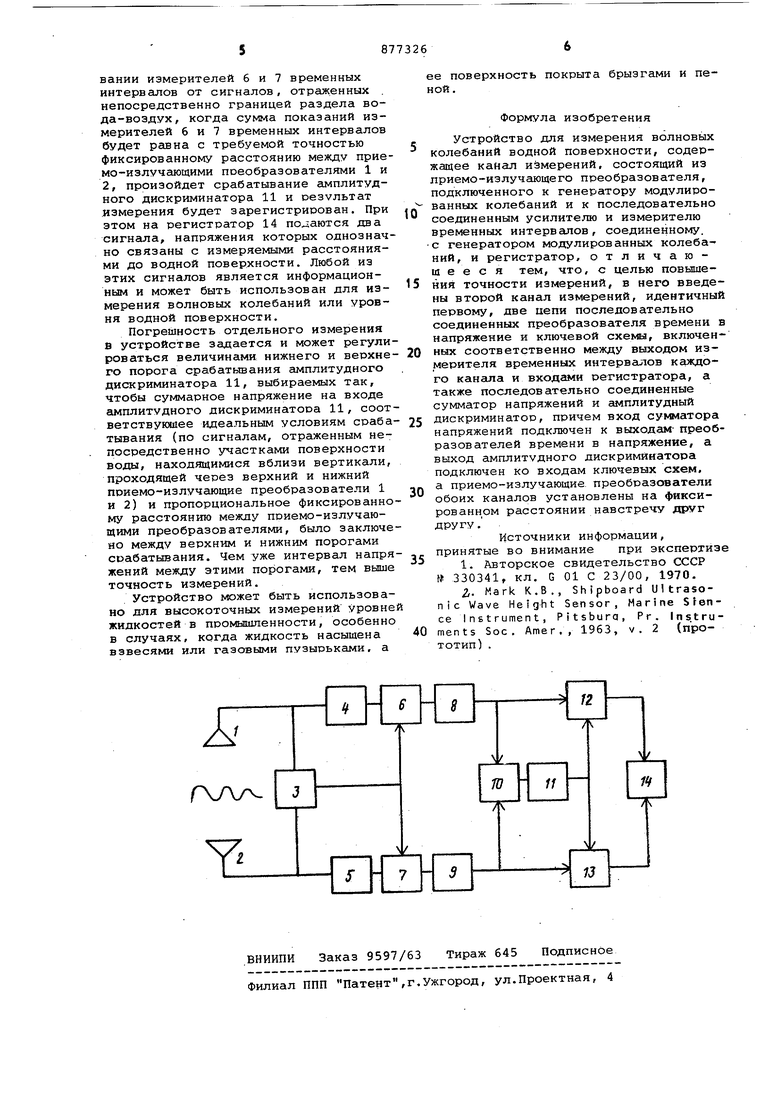
и входами регистратора, а также последовательно соединенные сумматор и амплитудный дискриминатор, причем вход сумматора подключен к выходам преобразователей времени в напряжение, а выход амплитудного дискрими.натора подключен ко входам ключевых схем, а приемо-иэлучаюшие преобразо ватели обоих каналов установлены на фиксированном расстоянии навстречу друг другу. На чертеже представлена блок-схе ма устройства. Устройство содержит два канала измерений, которые состоят из приемо излучающих преобразователей 1 и 2, которые подключены к генератору 3 мо дулированных колебаний, соединенному с усилителями 4 и 5. Сигналы с выхо дов усилителей 4 и 5 поданы на входы измерителей 6 и 7 временных ин терва лов, исполняющих роль дальномерных каналов. На вторые входы И31 юрителей б и 7 временных интервалов поданы сигналы с генератора 3 модулированных колебаний. Выходы измерителей 6 и 7 временных интервалов подключены ко входам преобразователей 8 и 9 вре мени в напряжение, сигналы с выходов КОТОРЫХ поданы на входы сумматора 10 напряжений, выход сумматора 10 подключен ко входу амплитудного дискриминатора 11, сигнал с выхода которого подан на управляющие входы ключевых схем 12 и 13, подключенных к регистратору 14. Приемо-излучаюшие пре образователи 1 и 2 расположены один в воздухе, другой - в воде. Устройство работает следующим образом. Генератор 3 модулированных колеб ний вырабатывает, например,.прямоугольные электрические ИМПУЛЬСЫ с вы сокочастотным заполнением, поступающие на приемо-излучающие преобразова тели 1 и 2, которыми одновременно излучаются акустические сигналы в напоавлении к водной поверхности, од новременно генератор 3 модулированных колебаний запускает измерители б и 7 временных интервалов. Сигналы принятые преобразователями 1 и 2, от раженные водной поверхностью (или брызгами и пузырьками), усиливаются и формируются усилителями 4 и 5 и по даются на вторые входы измерителей 6 и 7 временных интервалов, которые при этом срабатывают (каждый в свое время), т.е. прекращают отсчет временных интервалов. Очевидно, что зарегистрированный измерителем б интер вал времени пропорционален расстоянию от приемо-излучакидего преобразователя 1 до водной поверхности, а интервал времени, зарегистрированный измерителем 7, пропорционален расстоянию от приемо-излучаюадего преобразователя 2 до водной поверхности. Преобразователи 8 и 9 времени в напряжение преобразуют зарегистрированные интервалы времени в напряжение и запоминают это напряжение, причем законы преобразования времени в напряжение выбраны разными для каждого из преобразователей 8 и 9 времени в напряжение так, чтобы скомпенсировать разницу в СКОРОСТИ распространения звука в воде и воздухе (практически для этого необходимо, чтобы коэффициент преобразования времени в напряжение для преобразователя 8 был примерно в 5 раз меньше коэффициента преобразования для преобразователя 9 времени в напряжение). Напряжения с выходов преобразователей 8 и 9 одинаково пропорциональные расстояниям от преобразователей. 1 и 2 до водной поверхности, подаются на выходы сумматора 10 напряжений, а также на выходы ключевых схем 12 и 13. Нижний и верхний пороги срабатывания амплитудного дискриминатора 11, на вход которого подается суммарное напряжение с выхода сумматора 10 напряжений, выбраны таким образом, чтобы на выходе амплитудного дискриминатора сигнал появился лишь в том случае, когда напряжение на его входе не будет отличаться от заданного напряжения, однозначно связанного с фиксированным расстоянием между приемо- излучакадими преобразователями 1 и 2, более, чем на незначительную определенную величину, связанную с допускаемой погрешностью измеряемых расстояний. Таким образом, если напряжение на входе амплитудного дискриминатора 11 будет равно или близко к заданному, то амплитудный дискриминатор 11 сработает и сигнал с его выхода, поданный на управляющие входы ключевых схем 12 и 13, откроет ключевые схемы, так что результат измерения будет зафиксирован регистратором 14. Если же напряжение на входе амплитудного дискриминатора 11 будет выше или ниже установленного допустимого интервала напряжений, то сигнал на его выходе будет отсутствовать, кличевые схеша окажутся запретными, а результаты измерений не будут зарегистрированы. Таким образом, в устройстве промахи в измерениях, вызываемые преждевременным срабатыванием измерителей 6 и 7 временных интервалов от воздушных пузырьков и водяных брызг, исключаются, так как в этом случае сумма показаний их будет меньше Фиксированного расстояния между приекюизлучгиощими преобразователями 1 и 2, амплитудный дискриминатор 11 не сработает и результаты измерений, являющихся дефектными, не будут зарегистрированы, в то же время при срабатывании измерителей 6 и 7 временных интервалов от сигналов, отраженных . непосредственно границей раздела вода-воздух, когда сумма показаний измерителей 6 и 7 временных интервалов будет равна с требуемой точностью фиксированному расстоянию между приемо-излучгиощими преобразователями 1 и 2, произойдет срабатывание с1мплитудного дискриминатора 11 и результат измерения будет зарегистрирован. При этом на регистратор 14 полаются два сигнсша, напряжения которых однозначно связаны с измеряемыми расстояниями до водной поверхности. Любой из этих сигналов является информационным и может быть использован для измерения волновых колебаний или уровня водной поверхности.
Погрешность отдельного измерения в устройстве задается и может регулироваться величинами нижнего и верхнего порога срабатьшания амплитудного дискриминатора 11, выбираемых так, чтобы суммарное напряжение на входе амплитудного дискриминатора 11, соответствующее идеальным условиям срабатывания (по сигналам, отраженным непосредственно участками поверхности воды, находящимися вблизи вертикали, проходящей через верхний и нижний приемо-излучающие преобразователи 1 и 2) и пропорциональное фиксированному расстоянию между приемо-излучающими преобразователями, было заключено между верхним и нижним порогами срабатывания. Чем уже интервал напряжений между этими порогами, тем выше точность измерений.
Устройство южeт быть использовано для высокоточных измерений Уровней жидкостей в промышленности, особенно в случаях, когда жидкость насыщена взвесями или газовыми пузырьками, а
ее поверхность покрыта брызгами и пеной.
Формула изобретения
Устройство для измерения волновых колебаний водной поверхности, содержащее канал измерений, состоящий из приемо-излучающего преобразователя, подключенного к генератору модулированных колебаний и к последовательно соединенным усилителю и измерителю временных интервалов, соединенному. с генератором модулированных колебаний, и регистратор, отличающееся тем, что, с целью повыше5ния точности измерений, в него введены ВТОРОЙ канал измерений, идентичный первому, две цепи последовательно соединенных преобразователя времени в напряжение и ключевой схемы, включен0ных соответственно между выходом измерителя временных интервгипов каждого кансша и входами регистратора, а также последовательно соединенные сумматор напряжений и амплитудный дискриминатор, причем вход сукматора
5 напряжений подключен к выходам- преобразователей времени в напряжение, а выход амплитудного дискриминатора подключен ко входам ключевых схем, а приемо-излучающие преобразователи
0 обоих каналов установлены на фиксированном расстоянии навстречу ярУг другу.
Источники информации, принятые во внимание при экспертизе
5
1. Авторское свидетельство СССР № 330341, кл. G 01 С 23/00, 1970.
2,. Mark К.В., Shipboard Ultrasonic Wave Height Sensor, Marine Stence Instrument, Pitsburq, Pr. Instruments Soc . Amer., 1963, v. 2 (про0тотип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ | 2001 |
|
RU2208223C2 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| Способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру | 2019 |
|
RU2726388C1 |
| Устройство для контроля скорости движения сосуда подъемника | 1983 |
|
SU1146270A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА | 1998 |
|
RU2152597C1 |
| Устройство для измерения скорости звука | 1990 |
|
SU1728672A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА ПОВЫШЕННОЙ ТОЧНОСТИ | 1998 |
|
RU2152596C1 |
| Устройство для ультразвукового контроля движущихся изделий | 1986 |
|
SU1415172A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ СВОБОДНОГО ГАЗА В ЖИДКОСТИ | 1991 |
|
RU2020475C1 |
| Устройство для ультразвукового контроля движущихся изделий | 1985 |
|
SU1270685A1 |
