Область техники
Настоящее изобретение относится к снарядам, имеющим убирающиеся стабилизаторы, а более конкретно - к ракете, имеющей механизм развертывания убирающихся стабилизаторов.
Предшествующий уровень техники
Во многих типах снарядов используются две или более выступающих поверхности для воздействия на поток текучей среды вокруг снаряда и облегчения управления его траекторией при движении к цели. Типы таких снарядов включают метательные снаряды, ракеты, бомбы, торпеды и т.п. Например, ракеты обычно имеют практически цилиндрический корпус с по меньшей мере двумя аэродинамическими поверхностями или стабилизаторами, которые выступают наружу от боковых поверхностей ракеты, и оказывают влияние на аэродинамические характеристики ракеты в полете. Стабилизаторы обычно имеют аэродинамическую поверхность, которая ориентирована вдоль кромок или несколько наклонена относительно воздушного потока, когда ракета летит по прямой линии. Эти стабилизаторы могут быть статичными (неподвижными) или динамичными (избирательно подвижными, т.е. управляемыми). Неподвижные стабилизаторы обычно используются для стабилизации ракет во время полета и не двигаются, будучи полностью развернутыми. Управляемые стабилизаторы (управляющие стабилизаторы) используются для управления или направления ракеты путем избирательного изменения положения стабилизаторов относительно воздушного потока под действием системы управления ракетой.
Во многих случаях стабилизаторы на время хранения или при установке на транспортное средство перед использованием убираются в позицию, прилегающую к наружной поверхности или расположенную внутри корпуса ракеты. В некоторых случаях ракету хранят в трубе, контейнере или другом защитном футляре, при этом защитный футляр может служить пусковой установкой. Стабилизаторы убирают для того, чтобы уменьшить эффективный диаметр ракеты, что позволяет хранить или транспортировать большее количество ракет в ограниченном пространстве. Это позволяет также снизить вероятность повреждения стабилизаторов во время хранения и обращения с ракетами. Кроме того, это позволяет максимально использовать внутреннее пространство ракеты для размещения электронных узлов и боевых головок.
Стабилизаторы выдвигаются из походного положения вскоре после развертывания ракеты, либо во время установки или запуска ракеты. Разработаны различные относительно сложные механизмы развертывания, позволяющие убирать, развертывать и фиксировать стабилизаторы на месте. Управляющие стабилизаторы могут перемещаться и далее (обычно только поворачиваться) с помощью исполнительной системы сразу после развертывания управляющих стабилизаторов.
Применяемые в настоящее время механизмы развертывания стабилизаторов являются относительно тяжелыми, сложными и дорогостоящими в конструировании, изготовлении и обслуживании. Кроме того, некоторые механизмы занимают относительно большой объем внутри ракеты, что является серьезным недостатком, учитывая ограниченность пространства внутри ракеты.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание простого и надежного устройства для крепления, развертывания и фиксации убирающихся стабилизаторов для снарядов в развернутом положении, которое обеспечивает дополнительные преимущества в отношении экономии затрат, веса и пространства.
Согласно настоящему изобретению предложена ракета с механизмом развертывания, который автоматически развертывает стабилизатор из походного положения в развернутое положение сразу же после освобождения стабилизатора. Механизм развертывания включает в себя пружину, создающую смещающее усилие, заставляющее стабилизатор быстро, просто и надежно менять походное положение на развернутое положение. Механизм развертывания включает также один или несколько кулачковых пазов или других средств для перевода стабилизатора из походного положения в развернутое.
Механизм развертывания для ракет включает трубчатый корпус кулачка, который может быть установлен в цилиндрической полости в корпусе ракеты. Ведущий штырь соединен с корпусом кулачка через посредство пружины, которая сдвигает штырь к развернутой ориентации. Стабилизатор соединен с кулачковым штырем, который входит в кулачковые пазы в корпусе кулачка, чтобы направлять стабилизатор при его развертывании. Кулачковый штырь соединяет также между собой стабилизатор и ведущий штырь. Ведущий штырь и пружина взаимодействуют при перемещении стабилизатора из походного положения в развернутое, в то время как кулачковый штырь и кулачковые пазы направляют стабилизатор при его развертывании.
Кулачковые пазы могут также поворачивать стабилизатор после его развертывания и/или фиксировать его на месте. Такой механизм развертывания может использоваться как с неподвижным стабилизатором, так и со стабилизатором динамического управления, в любом типе снарядов, имеющих убирающиеся стабилизаторы, включая описанную ракету. Для упрощения описания в нем упоминаются лишь. ракеты, однако изобретение включает и другие типы снарядов, к которым может быть применимо это описание.
Более конкретно согласно одному аспекту изобретение касается механизма развертывания для ракеты, имеющей по меньшей мере один аэродинамический стабилизатор. Механизм развертывания содержит пружину, устанавливаемую в ракете для развертывания по меньшей мере одного стабилизатора. Механизм развертывания применим для перемещения по меньшей мере одного стабилизатора из походного положения в развернутое, отличающееся от походного положения.
Согласно другому аспекту изобретение касается механизма развертывания, который содержит дополнительно трубчатый кулачок, имеющий по меньшей мере один кулачковый паз и кулачковый штырь, соединенный по меньшей с одним стабилизатором. Пружина соединена с кулачковым штырем для смещения кулачкового штыря в развернутое положение. В развернутом положении по меньшей мере один стабилизатор находится в развернутом положении. Кулачковый штырь перемещается вдоль по меньшей мере одного кулачкового паза и направляется им, чтобы поворачивать вокруг шарнира по меньшей мере один стабилизатор и для разворота по меньшей мере одного стабилизатора из походного положения в развернутое положение.
Для решения поставленной задачи, согласно изобретению, предложен механизм развертывания, описанный ниже и заявленный в формуле изобретения.
Краткое описание чертежей
Преимущества и признаки изобретения поясняются последующим подробным описанием изобретения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает общий вид с разрезом передней части корпуса ракеты с аэродинамическими стабилизаторами в походном положении, согласно изобретению;
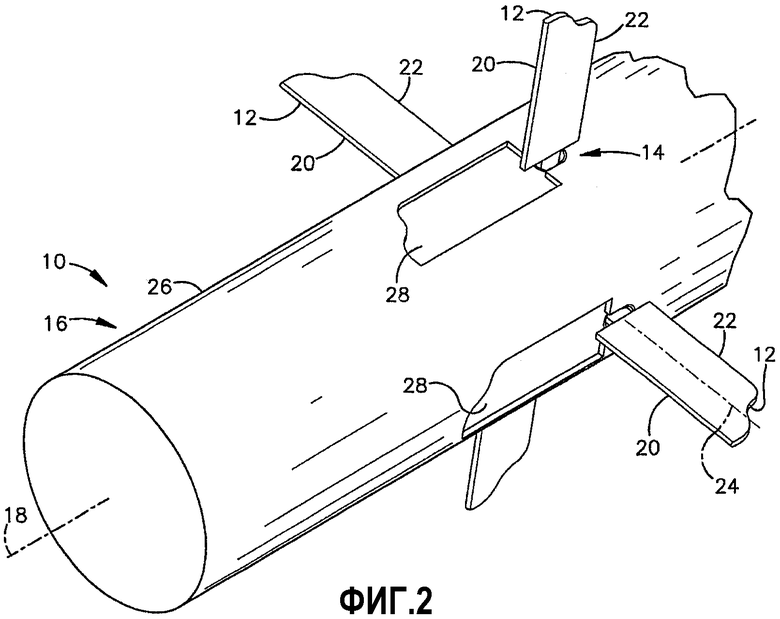
фиг.2 - общий вид с разрезом ракеты со стабилизаторами, находящимися в развернутом положении, согласно изобретению;
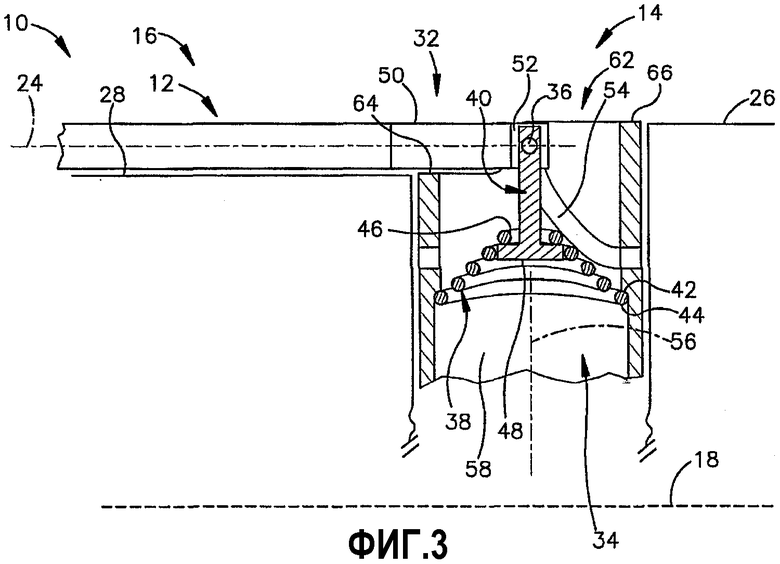
фиг.3 - разрез корпуса ракеты со стабилизатором и секционированным механизмом развертывания, согласно настоящему изобретению в походном положении, согласно изобретению;
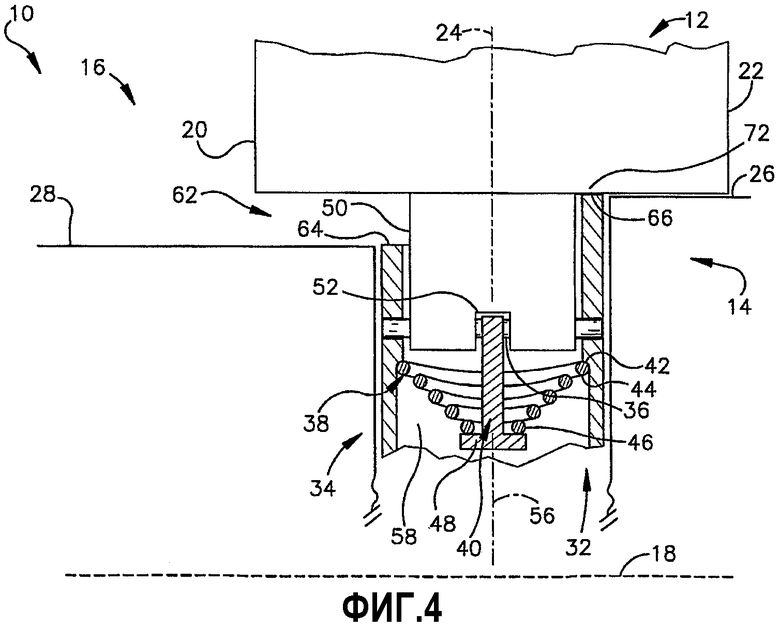
фиг.4 - разрез корпуса ракеты со стабилизатором и секционированным механизмом развертывания, в развернутом положении, согласно изобретению;
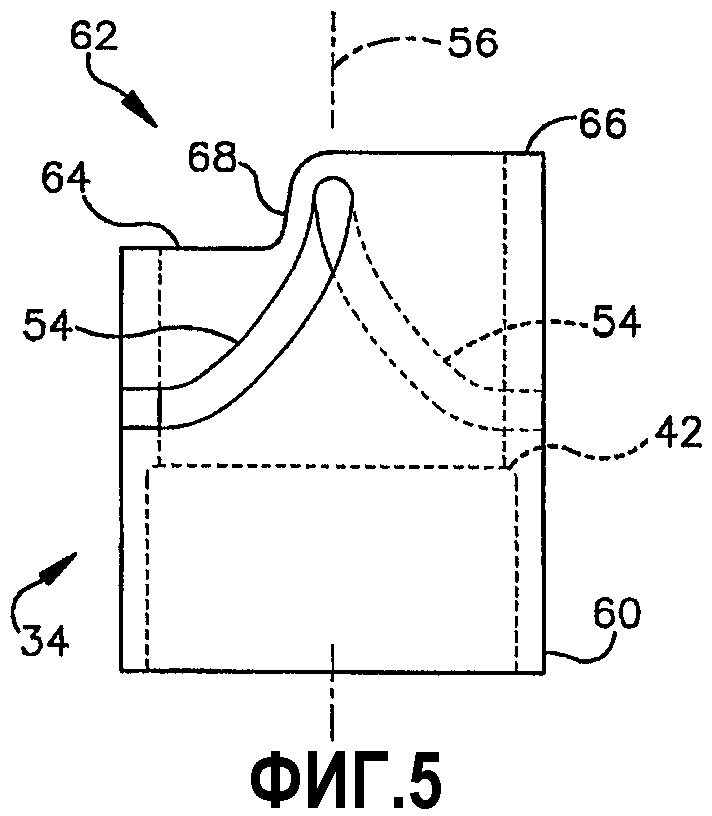
фиг.5 - вид сбоку трубчатого кулачка, согласно изобретению;
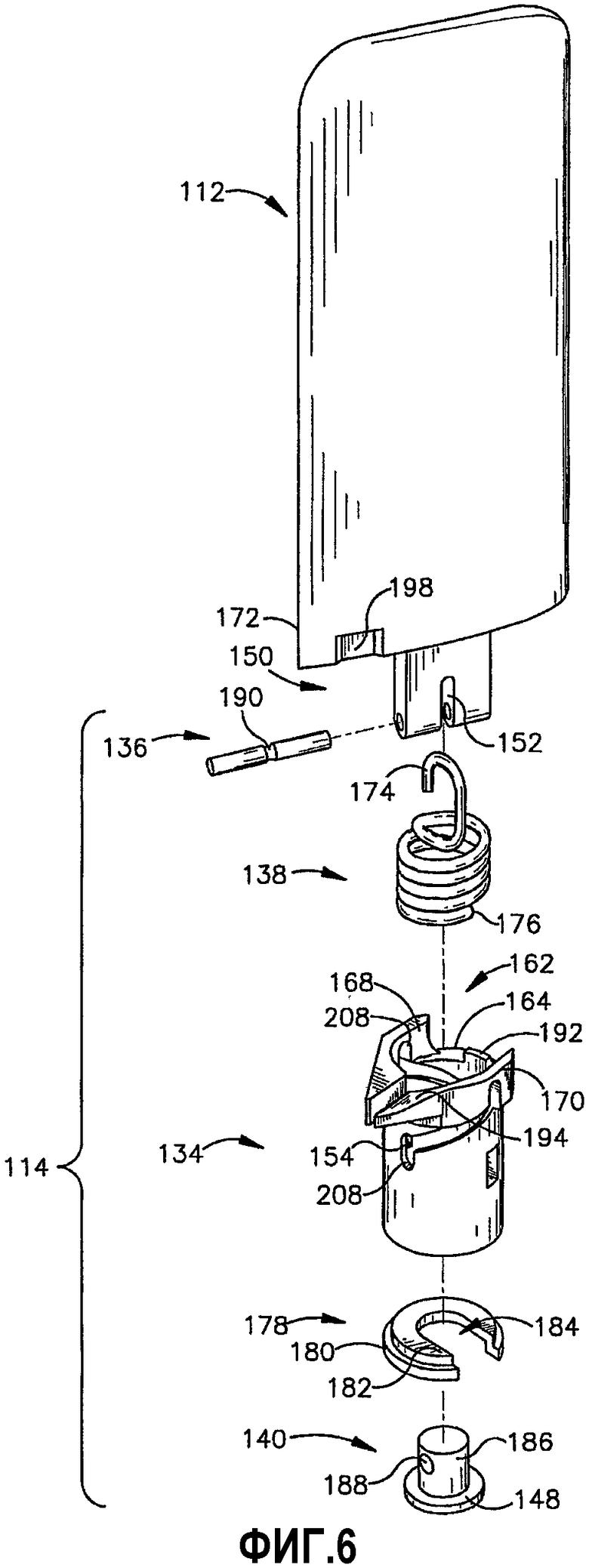
фиг.6 - общий вид стабилизатора и механизма развертывания в разобранном виде, согласно другому варианту реализации изобретения;
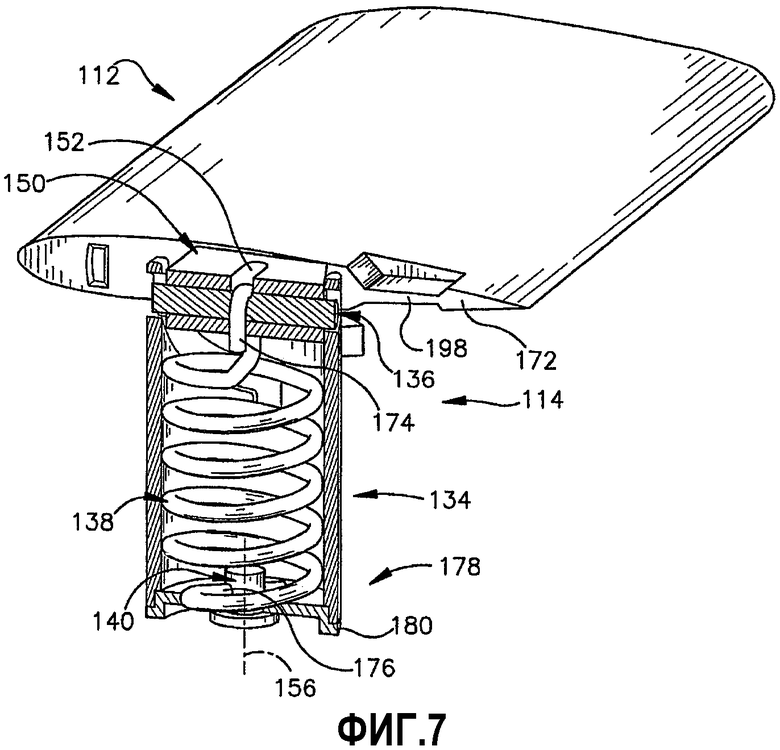
фиг.7 - общий вид стабилизатора и механизма развертывания, согласно фиг.6, в походном положении (частичный разрез), согласно изобретению;
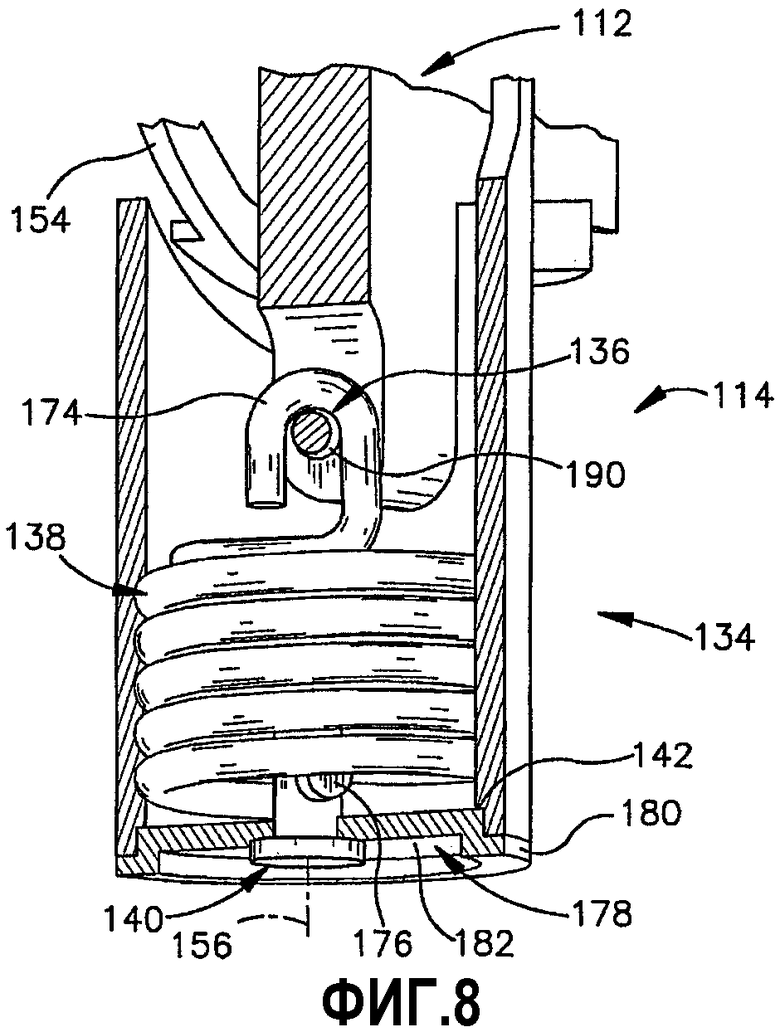
фиг. 8 - общий вид стабилизатора и механизма развертывания согласно фиг.6, в развернутом положении (частичный разрез), согласно изобретению;
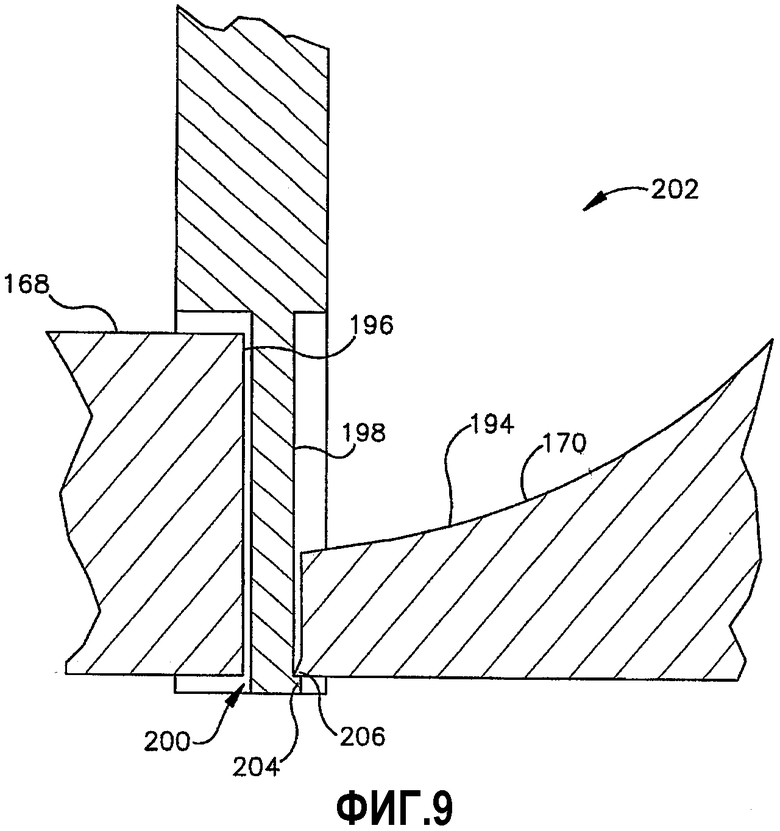
фиг.9 - разрез механизма фиксации стабилизатора, согласно изобретению;
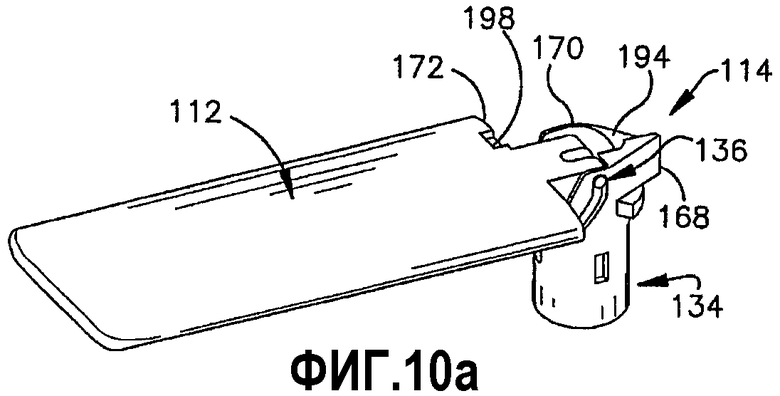
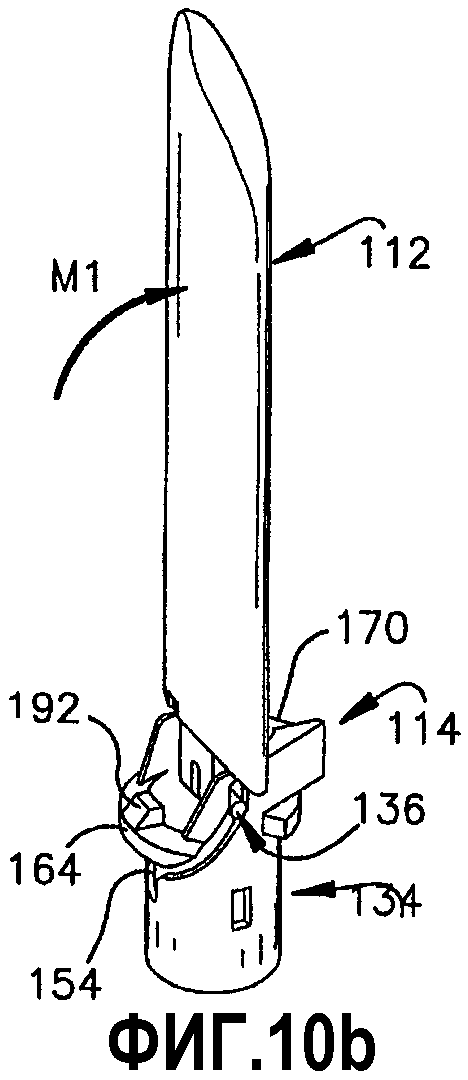
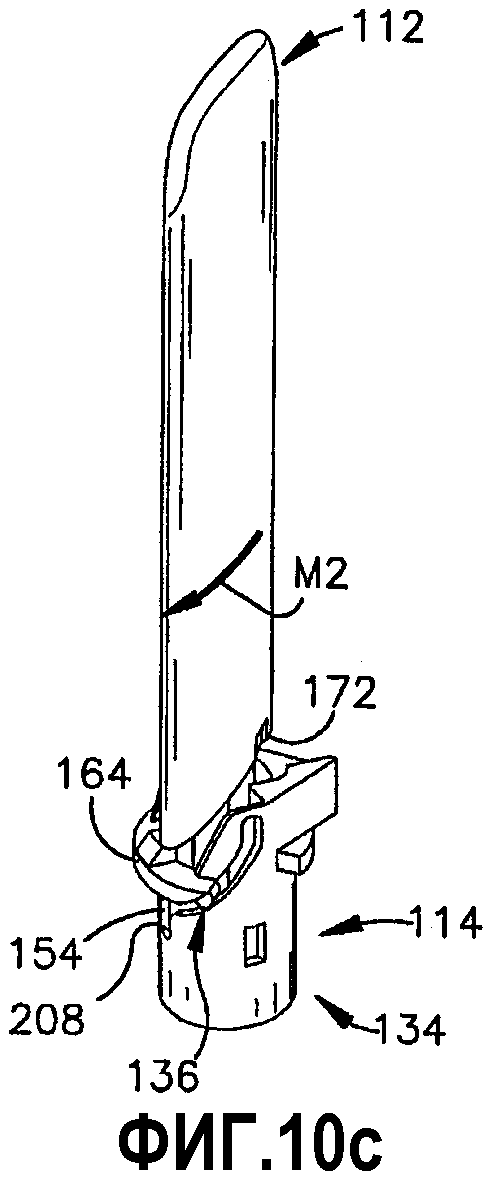
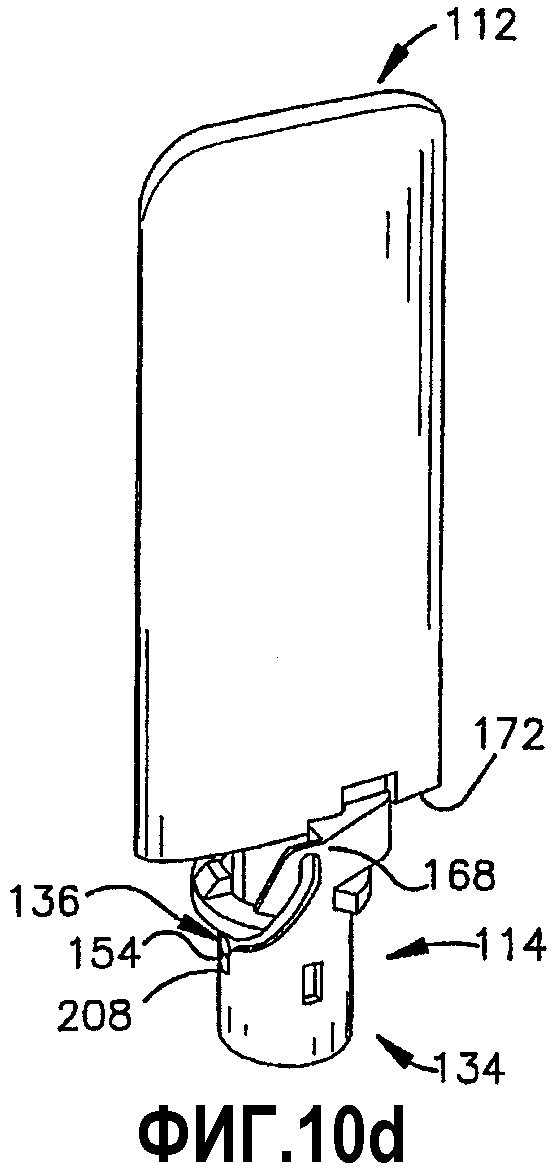
фиг.10а-10е - общие виды стабилизатора и механизма развертывания, показанных на фиг.6, переходы из походного положения в развернутое положение, согласно изобретению;
фиг.11a-11b - общие виды трубчатого кулачка в разных положениях, согласно еще одному варианту реализации изобретения;
фиг.12 - стабилизатор и механизм развертывания (вид в разрезе), показанных на фиг.10а-10b, в исполнительной системе ракеты, согласно изобретению;
фиг.13 - общий вид стабилизатора и механизма развертывания в разобранном виде, согласно еще одному варианту реализации изобретения;
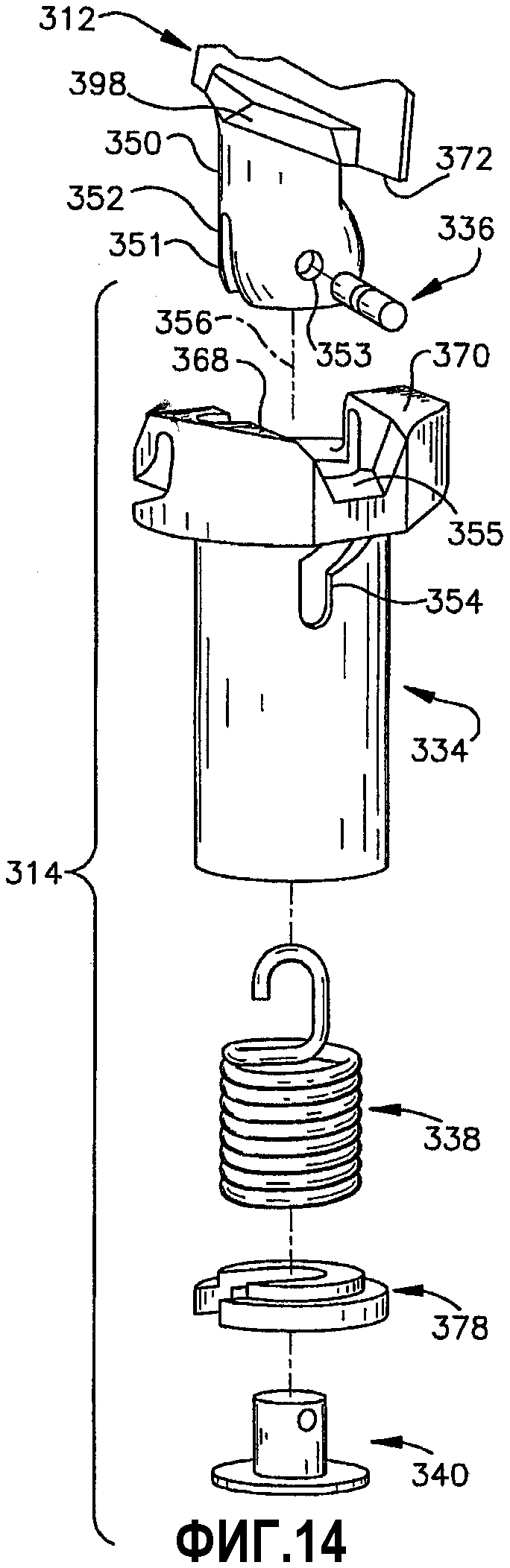
фиг.14 - общий вид стабилизатора и механизма развертывания в разобранном виде, показанных на фиг.13, под другим углом наблюдения, согласно изобретению;
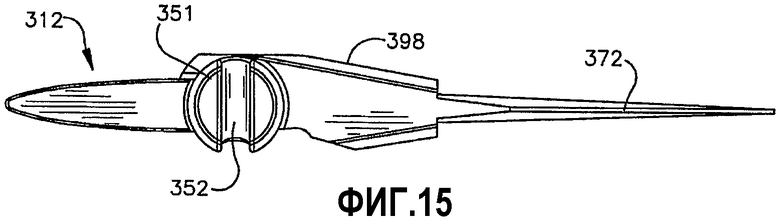
фиг.15 - стабилизатор (вид снизу), показанный на фиг.13, согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
Снаряд, такой как ракета 10 (фиг.1, 2), имеет множество стабилизаторов 12 для стабилизации или управления ракетой во время полета. Стабилизаторы 12 включают по меньшей мере один убирающийся стабилизатор 12 и механизм 14 развертывания, предназначенный для перемещения стабилизатора 12 из походного положения (фиг.1) в развернутое положение (фиг.2) так, что ракета 10 может храниться или запускаться в более компактной форме. Приведенная в качестве иллюстрации ракета 10 имеет четыре стабилизатора 12, установленных на цилиндрическом корпусе 16, имеющем продольную ось 18. Хотя настоящее описание относится к ракете 10, показанной на чертежах, приведенная в качестве иллюстрации ракета 10 представляет собой любой тип снаряда, в котором используются убирающиеся стабилизаторы.
Каждый стабилизатор 12 имеет переднюю кромку 20 и заднюю кромку 22, ограничивающие стабилизатор 12 по ширине, и продольную ось 24, проходящую приблизительно по длине стабилизатора 12. Передняя кромка 20 стабилизатора 12 предпочтительно обращена во время полета вперед, обычно к ведущему или переднему концу ракеты 10. Толщина стабилизатора 12 меньше его ширины или длины, а геометрическую форму стабилизатора 12 подбирают в зависимости от его предполагаемого применения.
В походном положении стабилизаторы 12 (фиг.1) прилегают к поверхности 26 корпуса 16 ракеты. Продольная ось 24 каждого стабилизатора 12 расположена приблизительно параллельно продольной оси 18 корпуса 16 ракеты, а передняя кромка 20 и задняя кромка 22 каждого стабилизатора 12 обращены в стороны для создания компактного походного положения, при котором ракета 10 занимает минимальный объем. В описываемом варианте реализации корпус 16 ракеты имеет на своей поверхности 26 продольное углубление 28 (фиг.2) для вмещения стабилизатора 12 в походном положении или положении хранения. Наружная поверхность 30 (фиг.1) стабилизатора 12 в убранном и помещенном в углубление 28 положении соответствует наружной поверхности 26 ракеты 10. Углубление 28 имеет форму и размеры, достаточные для размещения стабилизатора 12, при этом объем ракеты 10, занятый углублением 28, сведен к минимуму. В описываемом варианте реализации углубление 28 проходит от конца стабилизатора 12, прикрепленного к ракете 10, в направлении переднего конца ракеты 10.
В развернутом положении (фиг.12), каждый стабилизатор 12 отходит от поверхности корпуса 16 ракеты. Продольная ось 24 стабилизатора 12 перпендикулярна продольной оси 18 корпуса 16 ракеты, а передняя кромка 20 обращена вперед, к переднему концу ракеты 10. Стабилизатор 12 соединен с корпусом 16 ракеты механизмом 14 развертывания, который переводит стабилизатор 12 из походного положения в развернутое положение.
Сборочный узел, включающий стабилизатор 12 (фиг.3-5) и механизм 14 развертывания, установлен по меньшей мере частично в полости 32 в корпусе 16 ракеты (фиг.3, 4). Механизм 14 развертывания содержит трубчатый кулачок 34, кулачковый штырь 36, приводную пружину 38 и ведущий штырь 40. Кулачок 34 имеет внутренний выступ, ступень или полку 42, образованный путем резкого изменения внутреннего диаметра для зацепления наружного витка 44 приводной пружины 38, которая в описываемом варианте реализации является конической пружиной. Внутренний виток 46 приводной пружины 38 соединен с ведущим штырем 40 для приложения к нему усилия. В этом варианте внутренний виток 46 приводной пружины 38 входит в зацепление с фланцевым участком 48 ведущего штыря 40, более широким, чем прилегающий участок ведущего штыря 40. Иными словами, фланцевый участок 48 является кольцом или кольцевым диском на одном конце имеющего меньший диаметр (в общем цилиндрического) участка ведущего штыря 40. Приводная пружина 38 установлена внутри кулачка 34 между выступом 42 и фланцевым участком 48 ведущего штыря 40, чтобы сдвигать или смещать ведущий штырь в развернутое положение.
Ведущий штырь 40 соединяет между собой приводную пружину 38 и кулачковый штырь 36. В описываемом варианте реализации соединительный участок 50 стабилизатора 12 имеет на свободном конце центральный вырез 52, а кулачковый штырь 36 установлен таким образом, чтобы пересекать центральный вырез 52. Концевые участки кулачкового штыря 36 выступают за кромки соединительного участка 50, чтобы войти в зацепление с кулачковыми пазами 54. Ведущий штырь 40 соединен с кулачковым штырем 36 в центральном вырезе 52. Кулачковый штырь 36 может поворачиваться относительно по меньшей мере одного из ведущего штыря 40 и соединительного участка 50 стабилизатора 12, чтобы позволить стабилизатору 12 поворачиваться вокруг продольной оси кулачкового штифта 36. Кулачковый штифт 36 также поворачивается вокруг центральной оси, имеющей приблизительно одинаковую длину с продольной осью 56 кулачка 34. Кулачковый штырь 36 остается при вращении перпендикулярным к продольной оси 56 кулачка 34. Кулачковый штырь 36 направляется по меньшей мере одним кулачковым желобком или пазом 54, идущим от внутренней поверхности 58 кулачка 34, который вмещает и направляет концевые участки кулачкового штыря 36. Иными словами, кулачковый штырь 36 действует как следящий элемент при прохождении по кулачковым пазам 54.
Кулачковые пазы 54 могут проходить частично или полностью по стенке кулачка 34. В описываемом варианте реализации кулачок 34 имеет пару диаметрально противоположных и приблизительно спиральных пазов 54, которые направляют кулачковый штырь 36 для одновременного вращения и перемещения вдоль продольной оси 56 кулачка 34 (фиг.5). Форма кулачковых пазов 54 может менять путь и ориентацию стабилизатора 12 при движении кулачкового штыря между походным и развернутым положениями.
Кулачок 34 направляет развертывание стабилизатора 12 и закреплен в полости 32, что не допускает его вращения по меньшей мере в одном направлении, например путем совмещения снабженного резьбой конца (установочный конец 60, фиг.5) кулачка 34 с соответствующей резьбой в полости 32 (не показана). Это позволяет не допустить отделения кулачка 34 при развороте стабилизатора в нужное положение. Противоположный конец цилиндрического кулачка 34 (рабочий конец 62) включает пару ступенчатых поверхностей 64 и 66 (далее поворотная поверхность 64 и упорная поверхность 66), разделенных двумя разнесенными в стороны вертикальными поверхностями (одна показана на фиг.5) 68, проходящими параллельно продольной оси 56 кулачка 34. Вертикальные поверхности 68 помещены между поворотной поверхностью 64 на нижнем уступе и упорной поверхностью 66 на верхнем уступе. Поворотная поверхность 64 образуется за счет отсутствия полуцилиндрической секции на рабочем конце 62 кулачка 34. Кулачок 34 устанавливают на ракете 10 таким образом, что поворотная поверхность 64 находится на одном уровне или возвышается над поверхностью углубления 28, прилегающей к полости 32. Упорная поверхность 66 проходит над поверхностью ракеты 26.
Когда стабилизатор 12 переходит из походного положения в развернутое положение, стабилизатор 12 одновременно поворачивается относительно поворотной поверхности 64 и вращается вокруг продольной оси 56 кулачка 34, причем конец 72 стабилизатора 12 в развернутом положении взаимодействует с упорной поверхностью 66. Проходящие вбок концевые участки кулачкового штыря 36 перемещаются по кулачковым пазам 54 до тех пор, пока кулачковый паз не достигнет развернутого положения (фиг.2) с боковыми концевыми участками, расположенным в соответствующих концах кулачковых пазов 54 или рядом с ними. Концевые участки 54 могут образовывать для кулачкового штыря 36 принудительные упоры, соответствующие походному и развернутому положениям стабилизатора 12. Иными словами, кулачковый штырь 36 может взаимодействовать с концами кулачковых пазов 54 в походном и развернутом положениях стабилизатора 12 соответственно.
Во время работы кулачковые пазы 54 осуществляют одновременное вращение стабилизатора 12 относительно горизонтальной и вертикальной осей в ответ на телескопическое осевое перемещение ведущего штыря 40. При втягивании ведущего штыря 40 приводной пружиной 38 кулачковый штырь 36 продвигается (в показанном положении) через кулачковые пазы 54 с одновременным поворотом кулачкового штыря 36 и стабилизатора 12 приблизительно на девяносто градусов (90°) от походного положения (фиг.3) в развернутое положение (фиг.4). В то же время соединительный участок 50 стабилизатора 12 поворачивается относительно поворотной поверхности 64 кулачка 34 и вдвигается в кулачок 34. Поворотная поверхность 64 эффективно действует в качестве оси шарнира для перемещения продольной оси 24 стабилизатора 12, когда стабилизатор 12 переходит из положения, по существу параллельного продольной оси 18 корпуса ракеты 16, (фиг.3) к положению, перпендикулярному продольной оси 18 корпуса ракеты 16 (фиг.4). Другими словами, кулачковый штырь 36 и кулачковые пазы 54 преобразуют осевое перемещение ведущего штыря 40 одновременно в осевое и вращательное перемещение стабилизатора 12 при следовании кулачкового штыря 36 по кулачковым пазам 54.
Когда стабилизатор находится в походном положении (фиг.3), приводная пружина 38 сохраняет потенциальную энергию. При высвобождении механизм 14 развертывания одновременно поворачивает вокруг шарнира и разворачивает стабилизатор 12 из походного положения (фиг.3) в развернутое положение (фиг.4). Энергия приводной пружины 38 движет кулачковый штырь 36 вдоль продольной оси 56 кулачка 34 и удерживает также стабилизатор 12 после развертывания в развернутом положении. Сопротивление воздушного потока также способствует развертыванию и удерживанию стабилизатора 12 в развернутом положении. Узел может быть модифицирован для установки на снарядах других размеров, конфигураций и типов. Например, приводные пружины 38 подбирают таким образом, чтобы развиваемое ими усилие соответствовало размерам стабилизаторов 12.
Возможно также использование механизма фиксации (не показан) для удержания стабилизатора 12 в развернутом положении. Например, концевые участки кулачкового штыря 36 могут быть подпружинены и смещаться наружу в глухие, а не сквозные пазы, а на конце кулачковых пазов 54 может быть размещен фиксатор (не показан). Подпружиненные участки будут двигаться по кулачковым пазам 54 до достижения соответствующих фиксаторов, где концевые участки должны продвинуться глубже в фиксаторы для фиксации кулачкового штыря 36 на месте. С другой стороны, в кулачковых пазах 54 может быть выполнена выпуклость (не показана), через которую подпружиненные концевые участки легко пройдут в первом направлении, но которая замедлит или предотвратит прохождение подпружиненных участков во втором направлении, противоположном первому направлению.
Стопорный механизм (не показан) также может быть использован для того, чтобы не допустить преждевременный выход стабилизаторов 12 из походного положения. Например, ушко на стабилизаторе 12 может удерживаться на месте фланцем, отходящим от наружной поверхности 26 корпуса ракеты 16, чтобы способствовать удержанию стабилизатора 12 в походном положении вплоть до развертывания. Могут также использоваться стопорные штифты (не показаны).
На фиг.6-10 показан другой вариант выполнения узла стабилизатора 112 и альтернативного механизма 114 развертывания. Для ясности описания аналогичные элементы обозначены сходными цифровыми позициями, с добавлением к ним сотни (100). Как и в предыдущем варианте реализации, механизм 114 развертывания содержит кулачок 134, кулачковый штырь 136, приводную пружину 138 и поворотный штырь 140. Кулачковый штырь 136 перекрывает центральный вырез 152 в соединительном участке 150 стабилизатора 112 и входит в кулачковый паз 154 в стенке кулачка 134. Относительное положение приводной пружины 38 (фиг.3) и ведущего штыря 40 (фиг.3) по сравнению с предыдущим вариантом реализации изменено на противоположное. В результате приводная пружина 138 помещена между кулачковым штырем 136 и поворотным штырем 140 и не воздействует непосредственно на корпус кулачка 134.
Приводная пружина 138 является пружиной растяжения, имеющей на одном конце петлю или крюк 174 для взаимодействия с кулачковым штырем 136, и загнутое ушко 176 на противоположном конце. Поворотный штырь 140 размещен в диске 178 на установочном конце кулачка 134. Диск 178 может быть прикреплен к кулачку 134 соответствующей резьбой (не показана) на диске 178 на установочном конце кулачка 134.
Диск 178 может удерживаться приводной пружиной 138 на внутреннем выступе 142 кулачка 134 (фиг.8). Кулачок 134 содержит внутренний выступ 142, который образует упор, ограничивающий глубину, на которую диск 178 может продвинуться внутрь кулачка 134. Приводная пружина 138 удерживает поворотный штырь 140 в диске 178. Однако поворотный штырь 140 может поворачиваться относительно диска 178 вокруг продольной оси, параллельной продольной оси 156 кулачка 134, когда приводная пружина 138 поворачивается вместе с кулачковым штырем 136. Такая компоновка дополнительно уменьшает количество движущихся частей. Далее, в этой компоновке к кулачковому штырю 136 прилагается дополнительное усилие, которое повышает надежность механизма развертывания 114. Кроме того, такая компоновка уменьшает количество операций сборки, например, позволяет вставить ушко 176 приводной пружины 138 в поворотный штырь 140 с наружной стороны кулачка 134.
Что касается подробного описания отдельных элементов, то диск 178 имеет кольцевой участок 180 большого диаметра и дисковый участок 182 небольшого диаметра, который прилегает к кольцевому участку 180. Дисковый участок 182 вставляют внутрь кулачка 134 и он взаимодействует с внутренним выступом 142, когда диск 178 полностью вставлен или закреплен. Дисковый участок 182 содержит также проем или паз, или иное отверстие 184 для пропуска поворотного штыря 140, проходящего через него (описано ниже). Дисковый участок 182 соединяется с внутренним диаметром кольцевого участка 180, образуя полость внутри кольцевого участка 180 для пропуска поворотного штыря 140.
Поворотный штырь 140 подобен ведущему штырю 40 (фиг.3). Поворотный штырь 140 имеет цилиндрический корпус 186, имеющий сквозное отверстие 188, идущее поперек продольной оси корпуса и предназначенное для пропуска ушка 176 приводной пружины 138. Фланцевый участок 148, имеющий большую протяженность в стороны, соединяется с прилегающим участком цилиндрического корпуса 186. В описываемом варианте реализации фланцевый участок является круговым кольцом или диском с диаметром, который больше отверстия 184 в дисковом участке 182 диска 178. Когда поворотный штырь 140 вставляют через отверстие в диске 178, фланцевый участок 148 помещается в полости. В сборе поворотный штырь 140 может свободно поворачиваться вокруг продольной оси, соответствующей продольной оси 156 кулачка 134. Во время развертывания поворотный штырь 140 поворачивается с приводной пружиной 138, когда приводная пружина 138 поворачивается с кулачковым штырем 136.
Приводная пружина 138 проходит вдоль продольной оси, перпендикулярной кулачковому штырю 138, и телескопически вставлена в трубчатый кулачок 134 для растяжения и сжатия параллельно продольной оси 156 кулачка 134. Приводная пружина 138 является пружиной растяжения, выполненной из нескольких витков. На одном конце последний виток образует крюк 174. На другом конце из последнего витка выполнено ушко 176.
Поворотный штырь 140 и диск 178 крепят приводную пружину 138 к кулачку 134. Приводная пружина 138 соединяет между собой поворотный штырь 140 и кулачковый штырь 136, чтобы протягивать кулачковый штырь 136 по кулачковым пазам 154 к поворотному штырю 140. Кулачковый штырь 136 соединяет между собой приводную пружину 138 и стабилизатор 112. В этом варианте реализации кулачковый штырь 136 имеет кольцевую канавку 190 для размещения крюкового участка 174 приводной пружины 138 в центральном вырезе 152 стабилизатора 112. Кольцевая канавка 190 препятствует боковому движению крюка 174 относительно кулачкового штыря 136.
В описываемом варианте реализации концы кулачкового паза 154 проходят в направлении, параллельном продольной оси 156 кулачка 134, чтобы препятствовать вращению стабилизатора 112, когда кулачковый штырь 136 движется по этому участку кулачкового паза 154. Соответственно кулачковый паз 154 заставляет стабилизатор 122 поворачиваться вокруг шарнира из походного положения без немедленного разворота, в отличие от предыдущего варианта реализации.
У верхнего или рабочего конца 162 кулачка 134 выполнен центральный вырез или пониженный в осевом направлении участок 164, образованный между двумя разнесенными в боковом направлении участками 168 и 170 стенки. На участке 164 кулачка 134 между участками 168 и 170 стенки образован клиновидный блок 192 (фиг.6). Клин 192 расположен приблизительно по центру пониженного в осевом направлении участка 164 и служит осью или центром шарнира, относительно которой первоначально поворачивается стабилизатор 112 при развертывании. Клин 192 может также быть использован в качестве ограничителя для предотвращения или сведения к минимуму раскачивания стабилизатора 112 в развернутом положении. Раскачивающееся движение стабилизатора 112 может происходить по направлению переднего конца ракеты или от него. Клин 192 имеет узкий упор сверху, который взаимодействует со стабилизатором 112 во время развертывания. Клин 192 имеет широкое основание для распределения воздействующих на него напряжений.
Начиная от пониженного в осевом направлении участка 164 участок стенки 170 включает наклонную плоскость 194, которая проходит по спирали вниз по часовой стрелке к противоположному концу кулачка 134. Наклонная плоскость 194 имеет крутизну, помогающую управлять стабилизатором 112 при его развертывании. По мере того, как стабилизатор 112 развертывается, конец или основание 172 стабилизатора взаимодействует с наклонной плоскостью 192 и опускается по спирали до тех пор, пока стабилизатор 112 не достигнет упора 196 (фиг.9), образуемого концом части противоположной стенки 168. Часть стенки 168 имеет одинаковую высоту, которая проходит над нижним концом наклонной плоскости 194 и препятствует дальнейшему развороту стабилизатора 112. Когда стабилизатор 112 входит в зацепление с упором 196, последний препятствует дальнейшему развороту стабилизатора 112, но позволяет стабилизатору 112 двигаться параллельно продольной оси 156 кулачка 134 (разъяснено ниже).
В описываемом варианте реализации стабилизатор 112 имеет клиновидную высечку 198, образованную в основании стабилизатора 112 для фиксации стабилизатора 112 в развернутом положении. Кулачок 134 дополнительно содержит прорезь 200 между концом наклонной поверхности 194 и упором 196. Прорезь 200 образует часть механизма фиксации 202 стабилизатора.
Клиновидная высечка 198 (фиг.9) может иметь на нижнем конце приподнятый ободок 204, клиновидная высечка 198 находится в зацеплении с механизмом фиксации стабилизатора 112, когда стабилизатор 112 находится в развернутом положении. Клиновидная высечка 198 имеет форму, которая обеспечивает скольжение по прорези 200 в первом направлении, вниз при проиллюстрированной ориентации, но его прохождение во втором направлении, противоположном первому направлению, будет ограничиваться или воспрещаться приподнятым ободком 204. Приподнятый ободок 204 взаимодействует с соответствующим приподнятым ограничительным участком 206 механизма 202 фиксации стабилизатора и предотвращает выход стабилизатора 112 из развернутого положения.
При сборке механизма 114 развертывания приводную пружину 138 вставляют в кулачок 134. Ушко 176 приводной пружины 138 вставляют через отверстие 184 и через сквозное отверстие 188 поворотного штыря 140. Поворотный штырь 140 вставлен в диск 178. Соединительный участок 150 стабилизатора 112 вставлен в кулачок 134, крюк 174 приводной пружины 138 помещен в вырез 152 и кулачковый штырь 136 вставлен через соединительный участок 150 и в крюк 174 приводной пружины 138 через пазы 154. Таким образом, крюк 174 приводной пружины 138 помещен в кольцевую канавку 190 кулачкового штыря 136 и в вырез 152 соединительного участка 150 стабилизатора 112. Диск 178 закреплен в кулачке 134 пружиной 138.
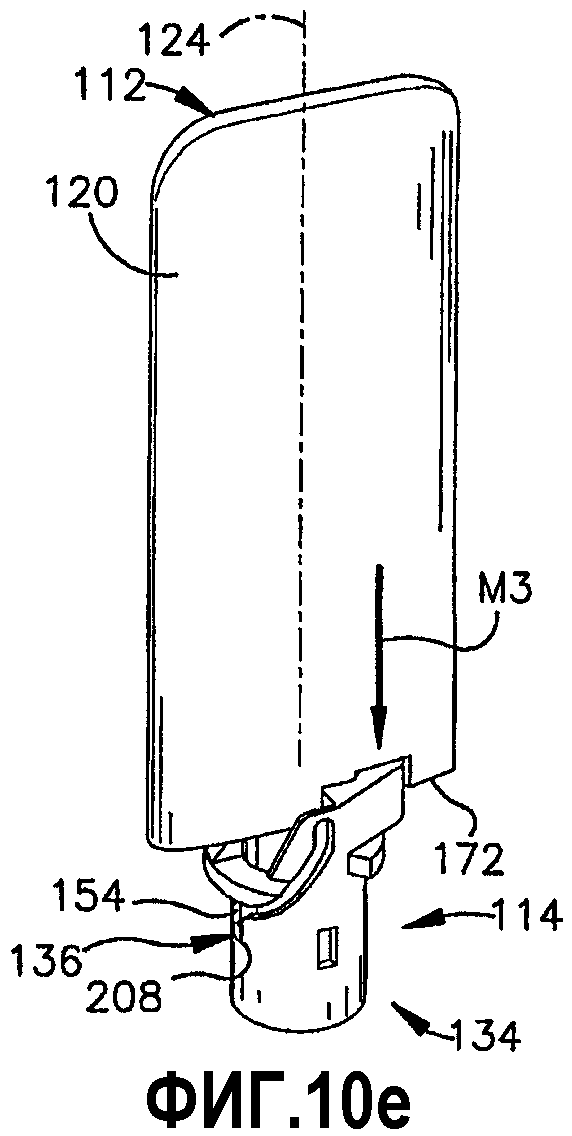
На фиг.10а-10е последовательно показано развертывание стабилизатора 112 из походного положения в развернутое положение. На фиг.10а стабилизатор 112 показан в походном положении. Сразу же после высвобождения стабилизатор 112 поворачивается относительно клина 192 пониженного в осевом направлении участка 164 кулачка 134. Затем стабилизатор 112 разворачивается приблизительно на девяносто градусов (90°) в то время, как кулачковый штырь 136 движется по кулачковым пазам 154 в осевом направлении к диску 178.
Выступающие в стороны концевые. участки кулачкового штыря 136 движутся по спирали по кулачковым пазам 154 (М2). Стабилизатор 112 одновременно разворачивается вместе с кулачковым штырем 136 и перемещается вниз в кулачок 134 вместе с кулачковым штырем 136 (М2). Конец 172 стабилизатора 112 входит в зацепление и скользит по наклонной плоскости 194 участка стенки 170 до тех пор, пока конец 172 не войдет в зацепление с упором 196 на участке 168 стенки (М2).
Затем стабилизатор 112 перемещается в осевом направлении к диску 178 (М3). Клиновидная высечка 198 стабилизатора 112 входит во взаимодействие с механизмом 202 фиксации стабилизатора, когда концевые участки кулачкового штыря 136 следуют по концевым участкам 208 пазов 154. Передний конец стабилизатора 112 входит в зацепление с упором 192 клина. Таким образом, стабилизатор 112 полностью развертывается с передней кромкой 120, обращенной к переднему концу ракеты 10 (фиг.2). Механизм 202 фиксации стабилизатора взаимодействует с концевыми участками 208 кулачковых пазов 154 и упором клина 192, чтобы уменьшить раскачивание стабилизатора 112 относительно кулачка 134 в течение оставшегося времени полета ракеты. В частности, клин 192 не допускает выхода стабилизатора 112 из механизма 202 фиксации при движении раскачивания стабилизатора 112 вперед.
Механизм 114 развертывания (фиг.6-10) является постоянно действующим как и в случае с механизмом 14 развертывания (фиг.3 и 4). Иными словами, механизм развертывания 114 непрерывно прикладывает усилие к стабилизаторам 112. Это заставляет стабилизаторы 112 разворачиваться из походного положения в развернутое положение.
Во время сборки ракеты стабилизаторы 112 собирают в походном положении или перемещают в него, и размещают, например, внутри пусковой установки ракеты (не показана). В результате размещения стабилизаторов 112 в походном положении механизм 114 развертывания непрерывно прикладывает усилие к поворотному штырю 140 по продольной оси 156 кулачка 134 по направлению к диску 178. Без фиксирующего механизма 112, удерживающего стабилизаторы у корпуса 16 ракеты (фиг.1), стабилизаторы 112 поворачиваются относительно пониженного в осевом направлении участка 164, с дальним концом стабилизаторов 112, отходящим от поверхности ракеты 26 (фиг.1) и прижимающимся к внутренней поверхности пусковой установки. Внутренняя поверхность пусковой установки препятствует таким образом полному развертыванию стабилизаторов 112.
Во время запуска дальние концы стабилизаторов 112 прижимаются к внутренней поверхности пусковой установки в то время, когда ракета движется по пусковой установке. Как только стабилизаторы проходят конец пусковой установки, механизмы 114 развертывания могут завершить развертывание стабилизаторов 112. Приводные пружины 138 заставляют выступающие в стороны концевые участки кулачковых штырей 136 двигаться по кулачковым пазам 154. Стабилизаторы 112 поворачиваются вокруг шарнира и затем разворачиваются вместе с кулачковыми штырями 136 до тех пор, пока основания стабилизаторов 112 не войдут в зацепление с механизмами фиксации 202 стабилизатора и упорами клиньев 192 кулачков 134. Таким образом, стабилизаторы 112 полностью развертываются с передними кромками 120, обращенными к переднему концу ракеты 10 (фиг.1), и с продольной осью 124 каждого стабилизатора 112, проходящими перпендикулярно поверхности ракеты 26 (фиг.2).
В альтернативном варианте реализации механизм развертывания 114 может приводиться в действие вручную или автоматически. Стопорный механизм (не показан), такой как удерживающий штифт, может использоваться для удержания каждого стабилизатора 112 в походном положении. Сразу после удаления удерживающего штифта механизм 114 развертывания развертывает стабилизатор 112 так, как описано в предыдущем параграфе.
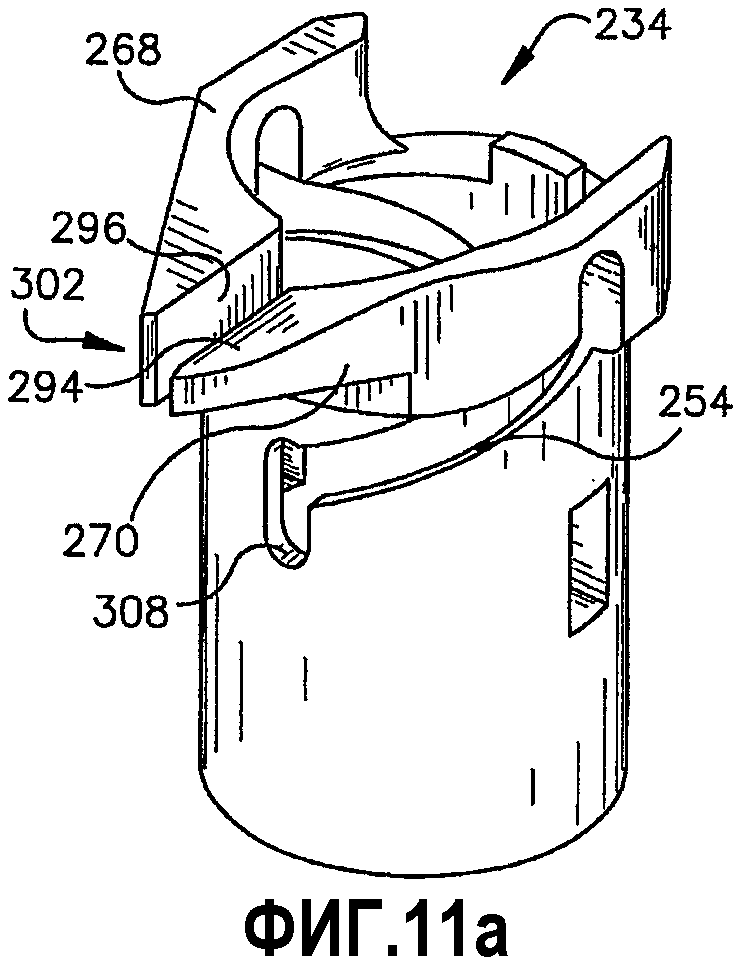
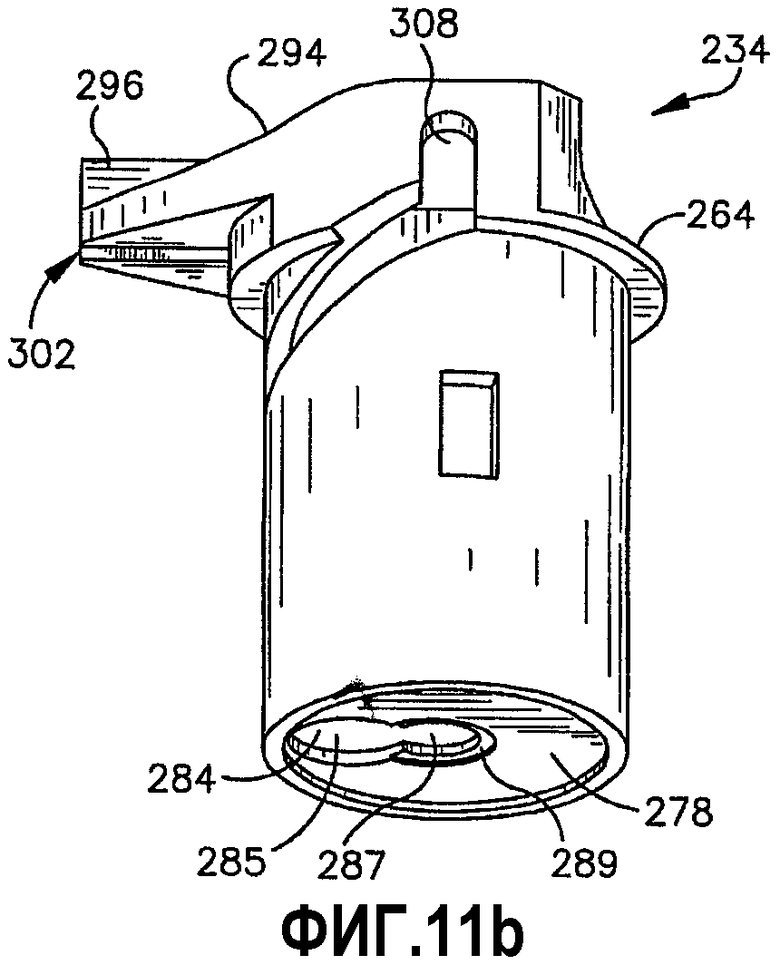
На фиг.11a-11b показан другой сборочный узел стабилизатора 112 и другой вариант воплощения механизма 214 развертывания. Механизма 214 развертывания по существу является таким же, как описанный ранее механизм 114 развертывания (фиг.6), но содержит альтернативный кулачок 234. В этом варианте реализации диск 178. (фиг.6) объединен с установочным концом кулачка 234, образуя единое целое. Т.е. кулачок 234 имеет конец, который выполняет функцию диска 178 (фиг.6). Конец 278 имеет форму диска и имеет сквозное отверстие 284. Отверстие 284 может иметь форму двух соединенных между собой отверстий, с отверстием 285 большого диаметра, размещенным возле наружного края конца 278, и отверстием 287 малого диаметра, размещенным возле центра конца 278. Отверстие 287 малого диаметра окружает углубленная поверхность 289, предназначенная для вмещения фланца 248 поворотного штыря 240. Конец 278 кулачка 234 позволяет завершить окончательную сборку, действуя полностью снаружи. Этот вариант реализации позволяет также уменьшить количество деталей механизма 214 развертывания.
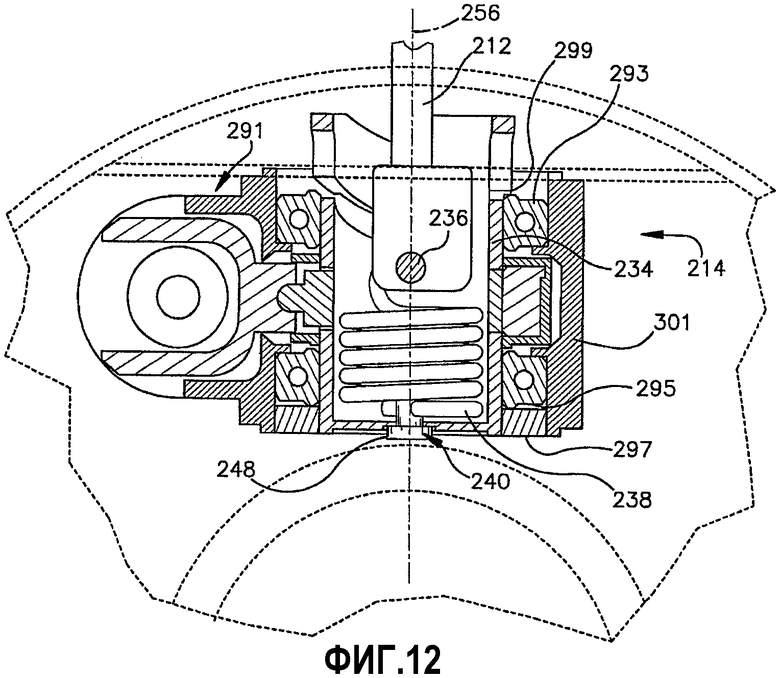
Сборочный узел, включающий управляющий стабилизатор 212 и механизм 214 развертывания, показан в сочетании с исполнительным механизмом 291 в походном положении (фиг.12). В этом варианте реализации кулачок 234 действует как исполнительный вал, установленный с возможностью вращения на исполнительном механизме 291 для избирательного поворота управляющего стабилизатора 212 относительно продольной оси 256 кулачка 234 сразу после того, как управляющий стабилизатор 212 перейдет в развернутое положение. Направляющее устройство ракеты (не показано) избирательно управляет исполнительным механизмом 291, который должен поворачивать управляющий стабилизатор 212 относительно направления воздушного потока для достижения управляемого полета ракеты.
Кулачок 234 (фиг.12) вставлен в исполнительный механизм 291 внутри верхнего подшипника 293 и нижнего подшипника 295. Кулачок 234 имеет резьбу на наружной поверхности нижнего конца, предназначенную для навинчивания на нее резьбовой гайки 297. Кулачок 234 имеет также верхний край или гребень 299. Верхний гребень 299 находится в зацеплении с внутренним кольцом верхнего подшипника 293, а гайка 297 находится в зацеплении с внутренним кольцом нижнего подшипника 295. При навинчивании и затягивании гайки 297 два подшипника 293 и 295 захватываются в установочном блоке 301 исполнительного механизма 291 и предварительно натягиваются для закрепления кулачка 234 в исполнительном механизме 291. Это не допускает перемещения кулачка 234 и позволяет исполнительному механизму 291 поворачивать кулачок 234 и стабилизатор 212 с большой скоростью.
На фиг.13-15 показан еще один сборочный узел, который содержит стабилизатор 312 и механизм 314 развертывания. Стабилизатор имеет соединительный участок 250 со сферической поверхностью 351 крепления. Сферическая поверхность 351 крепления имеет вырез 352 по центру, который разделяет сферическую поверхность крепления на две полусферические части. Сферическая поверхность 351 крепления имеет также сквозное отверстие 353, в которое вставляют кулачковый штырь 336.
Сферическую поверхность 351 крепления изготавливают для совмещения с внутренним диаметром кулачка 334 с очень малым допуском. Это позволяет сферической поверхности крепления 351 уменьшать нагрузку на кулачковый штырь 336, когда стабилизатор 312 поворачивается вокруг шарнира и разворачивается из походного положения в развернутое положение. В частности, сферическая поверхность 351 крепления уменьшает нагрузки, воздействующие на кулачковый штырь 336 в полном развернутом положении стабилизатора 212 путем передачи этих нагрузок на сферическую поверхность 351 крепления.
В основании 372 стабилизатора 312 от противоположных поверхностей стабилизатора 312 отходят клиновидные выступы, образующие шпонку 398. Шпонка 398 взаимодействует с механизмом 314 развертывания, помогая удерживать стабилизатор 312 в развернутом положении, как пояснено ниже.
Механизм 314 развертывания по существу сходен с описанным ранее механизмом 114 развертывания (фиг.6). Механизм 314 развертывания 314 содержит кулачок 334, кулачковый штырь 336, приводную пружину 338, поворотный штырь 340 и диск 378, собранный так, как описано выше в отношении фиг.6-10. Кулачок 334 имеет пониженный участок 364 и два разнесенных в стороны вертикальных участка 368 и 370, между которыми напротив пониженного участка 364 находится шпоночная канавка 355. Шпоночная канавка 355 обеспечивает дополнительную устойчивость стабилизатора 312 в полном развернутом положении и предотвращает или сводит к минимуму раскачивание стабилизатора 312 в оставшееся время полета ракеты.
Согласно изобретению, предложен простой и надежный механизм удержания стабилизаторов в походном положение и перевода стабилизаторов в развернутое положение. Кроме того, ни одна из деталей устройства не сбрасывается и не отделяется при развертывании стабилизаторов, сводя таким образом к минимуму или устраняя риск повреждения пусковой установки или нанесения травмы оператору.
Хотя изобретение было показано и описано в отношении некоторых предпочтительных вариантов реализации, специалистам в данной области техники очевидна возможность внесения равнозначных изменений и модификаций. В особенности это относится к различным функциям, выполняемым описанными выше элементами (узлами, устройствами, датчиками, схемами и т.д.), терминам (включая ссылку на «средства»), применяемым для описания таких элементов. Кроме того, в то время как определенный признак изобретения может быть раскрыт со ссылкой только на один из нескольких вариантов реализации, такой признак может комбинироваться с одним или несколькими другими признаками из других вариантов реализации, как может оказаться желательным или предпочтительным для любой данной или особой области применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВОЧНОЕ ПРИСПОСОБЛЕНИЕ С ПРЕДОХРАНИТЕЛЕМ ДЛЯ ИМПЛАНТИРУЕМОГО МЕДИЦИНСКОГО УСТРОЙСТВА | 2006 |
|
RU2434583C2 |
| УСТАНОВОЧНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ИМПЛАНТИРУЕМОГО МЕДИЦИНСКОГО УСТРОЙСТВА | 2006 |
|
RU2448666C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО | 2006 |
|
RU2435550C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО С СОЕДИНИТЕЛЬНЫМ МЕХАНИЗМОМ С ОБРАТНЫМ ДЕЙСТВИЕМ И СПОСОБ ПРИМЕНЕНИЯ | 2006 |
|
RU2434602C2 |
| ИНЪЕКЦИОННЫЙ ПОРТ | 2006 |
|
RU2434650C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО С УКАЗАТЕЛЕМ | 2006 |
|
RU2435615C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО С КРЫШКОЙ И СПОСОБ | 2006 |
|
RU2449741C2 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЕНИЕ РАЗВЕРТЫВАНИЕМ СКВАЖИННОГО ИНСТРУМЕНТА | 2013 |
|
RU2615552C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ СКОБКАМИ АППАРАТ С УСТРОЙСТВОМ ДЛЯ РЕГУЛИРОВКИ ВЫСОТЫ СКОБОК | 2009 |
|
RU2508912C2 |

Группа изобретений относится к ракетному вооружению, в частности к стабилизаторам, раскрывающимся после запуска ракеты. Ракета имеет механизм развертывания, который автоматически поворачивает вокруг шарнира и разворачивает стабилизатор из походного положения в развернутое положение. Механизм развертывания содержит пружину, которая создает смещающее усилие, заставляющее стабилизатор менять походное положение на развернутое положение. Реализация изобретений позволяет упростить конструкцию и повысить надежность механизма развертывания и фиксации стабилизаторов. 2 н. и 8 з.п. ф-лы, 15 ил.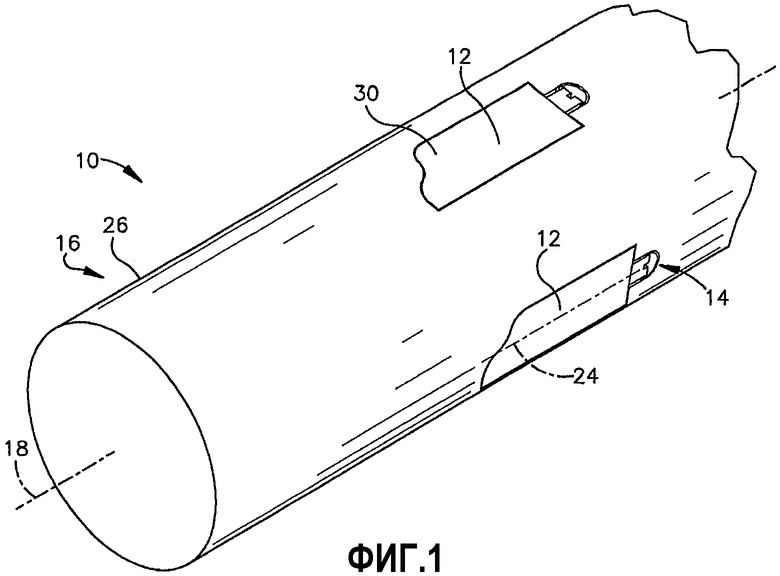
| DE 3010027 A1, 24.09.1981 | |||
| US 5114095 A, 19.05.1992 | |||
| US 4659036 A, 21.04.1987 | |||
| US 3684214 A, 15.08.1972 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045741C1 |

