Изобретение относится к управлению летательными аппаратами, а более конкретно, к аэрореактивному управлению с помощью реактивной силы в сочетании с аэродинамическими органами управления.
При управлении ракетой возникает необходимость быстрого разворота на цель при отсутствии аэродинамических сил или их недостаточном уровне сразу после выхода из пускового устройства или при полете ракеты на большой высоте.
Это имеет место, например, для вертикально стартующей зенитной ракеты при перехвате внезапно появляющейся цели.
Быстрота разворота ракеты на цель имеет в этом случае решающее значение в борьбе с атакующей целью для упреждающего ее поражения.
Важно также одновременно с разворотом продольной оси ракеты на цель быстро ориентировать ракету по крену в положение, определяемое условиями работы бортовых радиолокационных и радионавигационных устройств.
Известен способ управления ракетой с помощью отклонения истекающей струи маршевого двигателя.
Его недостатком является большой радиус разворота траектории ракеты из-за ее ускорения, что приводит к появлению "мертвой зоны" по дистанции вблизи обороняемого объекта, в которой цель не перехватывается.
Указанный недостаток частично устраняется в аэрореактивных системах, использующих газодинамические органы управления, срез сопла которых вынесен на боковую поверхность крыла или стабилизатора, где при помощи струй, истекающих с боковой поверхности крыла и являющихся одновременно приводом для отклонения элеронов, обеспечивается управление самолетом по крену при скоростных напорах, близких к нулю [1]
Недостатком указанного способа является необходимость специального агрегата для регулирования расхода газа, создающего управляющую силу, а также отсутствие реактивного управления по тангажу и курсу.
Известна комбинированная аэрореактивная система управления ракетой при помощи аэродинамических рулей и реактивных струй, истекающих параллельно плоскости руля через сопло, расположенное в районе задней кромки каждого из рулей [2]
Недостатком указанного способа является то, что ориентация сопла вдоль оси руля не позволяет полностью использовать энергию реактивной струи для создания управляющих ракетой сил, так как для управления используется только проекция тяги, не превышающая 25-50% от располагаемой величины реактивной силы. Это ограничение не позволяет использовать способ для управления малогабаритными ракетами, особенно при вертикальном старте, когда для обеспечения необходимого для перехвата цели малого времени реакции и радиуса разворота требуются большие управляющие реактивные силы.
Изобретение направлено на уменьшение времени реакции и радиуса разворота траектории ракеты при выходе на цель путем использования полностью всей энергии газовой струи, создающей управляющую силу, исключение специального агрегата для регулирования расхода газа, подводимого к соплам, и создание единого с рулем комбинированного аэрореактивного устройства, создающего управляющие силы по тангажу, курсу и крену при изменении скоростных напоров от нуля до максимума и в результате придания ракете способности быстро изменять направление полета и осуществлять разворот на цель минимального радиуса.
Технический результат достигается использованием способа управления ракетой, при котором разворот ее на цель осуществляется с помощью аэрореактивной системы управления, состоящей из аэродинамических рулей и газоструйного распределителя, создающего реактивную управляющую силу того же направления, что и аэродинамическая сила, и ориентированную перпендикулярно плоскости руля.
При этом суммарная величина управляющей реактивной силы изменяется пропорционально углу отклонения руля, достигая максимальной величины при отклонении его на угол около 10о. Регулирование управляющих усилий, создаваемых аэродинамическими рулями и газоструйным распределителем, осуществляется единым приводом путем поворота рулей.
Газ из источника, находящегося в корпусе ракеты, подается по газоводу в питающие патрубки и далее через подвижные соединения между корпусом ракеты и аэродинамическими рулями, в приемные отверстия газоструйного распределителя, расположенные в корпусе аэродинамических рулей. При этом подающие и приемные отверстия смещены относительно оси вращения рулей.
На фиг.1 показана ракета в момент склонения, после вертикального старта; на фиг.2 ракета в момент управления в полете по траектории; на фиг.3 проиллюстрировано изменение величины управляющей силы от угла отклонения руля; на фиг. 4 компоновочная схема комбинированного аэрореактивного устройства; на фиг. 5 расположение руля относительно питающего газовода (случай создания нулевой управляющей силы); на фиг.6 расположение руля относительно питающего газовода (случай создания управляющей силы, заданной величины и знака); на фиг. 7 расположение руля относительно питающего газовода (случай создания максимальной управляющей силы); на фиг.8 поперечное сечение руля.
При вертикальном старте для склонения ракеты в любом направлении на угол ε1 (ε 2) от вертикали используется в основном реактивная составляющая предложенного выше способа управления ракетой.
При полете ракеты по траектории система управления определяет величину потребного угла разворота ракеты ε3.
При малых величинах скоростного напора возможность поворота ракеты на цель за счет аэродинамических органов управления составляет величину β что недостаточно для поражения цели. В этом случае применяется способ аэрореактивного управления, обеспечивающий с помощью комбинированного аэрореактивного устройства использование полной энергии реактивных струй для достижения требуемого угла склонения ε3.
Для управления аэрореактивным способом в алгоритм управления вводится зависимость величины управляющей реактивной силы R каждого сопла от угла отклонения руля δ (см.фиг.3).
Изобретение реализует разворот ракеты на цель после вертикального старта до запуска маршевого двигателя, что позволяет исключить "мертвые зоны" в дистанции перехвата. Способ позволяет применить его и на удалении от точки пуска, где аэродинамические силы обычно недостаточны для энергичного маневрирования вследствие малой скорости или большой высоты полета. Одновременно с разворотом продольной оси ракеты на цель предлагаемый способ управления осуществляет разворот ракеты по крену в положение, необходимое для функционирования бортовых радиосистем за счет дифференциального отклонения рулей.
Такой способ управления может быть осуществлен комбинированным аэрореактивным устройством новой конструкции, содержащим аэродинамические рули, источник газа с питающими газоводами и газоструйные распределители, расположенные в корпусе каждого руля и отклоняемые с помощью единого привода.
Отличие комбинированного аэрореактивного устройства, позволяющее осуществить новый способ управления, состоит в том, что два сопла, создающие реактивную тягу, расположены перпендикулярно боковой поверхности аэродинамического руля, при этом оси их двух приемных отверстий, выполненных на нижней торцовой поверхности руля и разделенных перемычкой, как и ось выходного отверстия питающего газовода, расположенного на корпусе ракеты, смещены относительно оси вращения руля, что позволяет при повороте руля за счет перераспределения площадей питающих и приемных отверстий, пропорционального углу поворота рулей, регулировать тягу и создавать суммарные управляющие аэрореактивные моменты как при симметричном, так и при дифференциальном отклонении рулей путем сложения сил от аэродинамических рулей и реактивной тяги.
Источник газа может быть выполнен либо в виде газового аккумулятора давления, либо в виде газогенератора жидкого или твердого топлива с моноимпульсным или многоимпульсным зарядами, обеспечивающими многоразовость запуска системы.
Комбинированное аэрореактивное устройство содержит источник газа 1 в корпусе ракеты 2, газовод 3, подвижную герметизирующую втулку 4, сопла газораспределителя 5, аэродинамический руль 6 с осью 7, рулевой привод 8 и защитную эрозионностойкую накладку 9.
Конструктивно система подачи газа к нулю выполнена так, что газ от источника 1 подается по газоводу 3 на внешнюю поверхность корпуса ракеты 2. Газовод оканчивается подвижной герметизирующей втулкой 4 и защитной накладкой 9. Газоструйный распределитель, установленный в корпусе руля 6, имеет два коленообразных патрубка-газовода 11, каждый из которых заканчивается своим соплом 5 (левым и правым), плоскость среза которого расположена на боковой поверхности руля. Приемные отверстия газоводов газоструйного распределителя расположены на торце нижней плоскости руля и разделены перемычкой 10.
Комбинированное аэрореактивное устройство работает следующим образом.
Газ, протекая по газоводу, прижимает (за счет перепада давления) подвижную втулку 4 к приемным отверстиям патрубков-газоводов газоструйного устройства, при этом подвижное соединение корпус-руль герметизировано втулкой 4, обтюрирующей зазор между корпусом ракеты и рулем. При нулевом положении руля газ симметрично поступает в оба приемных отверстия патрубков-газоводов газоструйного распределителя и при истечении через левое и правое сопла создает нулевую результирующую реактивную силу. Система управления, определяющая величину потребной управляющей силы и ее направление, подает команду на отклонение руля, руль отклоняется приводом 8 на требуемый угол, в результате чего положения двух приемных отверстий смещаются относительно отверстия питающего газовода и происходит соответствующее перераспределение площадей приемных отверстий газоводов газоструйного распределителя. При этом (фиг.6) газ начинает поступать в преобладающем количестве через правый газовод к левому соплу, результирующая реактивная сила, создаваемая соплами, действует в том же направлении, что и аэродинамическая сила руля.
Для защиты корпуса ракеты от воздействия газа, образующегося при утечках через подвижное соединение корпус-руль, установлена специальная эрозионностойкая накладка 9 (см. на фиг.5, 6, 7). Максимальная реактивная сила достигается при совмещении осей приемного и подводящего отверстий при углах отклонения руля около 10о.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА СТАРТА И ОРИЕНТАЦИИ РАКЕТЫ | 1995 |
|
RU2082946C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| Газодинамическое устройство управления малых габаритов | 2020 |
|
RU2753034C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 1995 |
|
RU2103655C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| РАКЕТА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1996 |
|
RU2096734C1 |
| РЕАКТИВНЫЙ СНАРЯД | 1998 |
|
RU2134400C1 |
| РАКЕТА-НОСИТЕЛЬ, ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЕ ЗАПУСКА ПРИ ВОЗВРАЩЕНИИ И СИСТЕМА ВЕРТОЛЕТНОГО ПОДХВАТА ВОЗВРАЩАЕМОЙ СТУПЕНИ | 2015 |
|
RU2609539C1 |
| УПРАВЛЯЕМАЯ ПУЛЯ | 2012 |
|
RU2512047C1 |
| СПОСОБ ЗАПУСКА УПРАВЛЯЕМОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124694C1 |
Изобретение относится у управлению летательными аппаратами, а более конкретно к управлению с помощью реактивной силы в сочетании с аэродинамическими органами управления. Изобретение заключается в использовании для разворота ракеты на цель и одновременном управлении по крену полной величины тяги истекающей струи, действующей в ту же сторону, что и аэродинамическая сила руля. Это обеспечивает быстрый разворот ракеты на цель, уменьшая время реакции и конечный промах. Управление осуществляется комбинированным аэрореактивным устройством, содержащим источник газа 1, расположенный в корпусе 2 ракеты, аэродинамические рули 6 и газораспределители, расположенные в корпусе каждого руля 6 и отклоняемые с помощью единого привода 8. 2 с. и 4 з.п. ф-лы, 8 ил.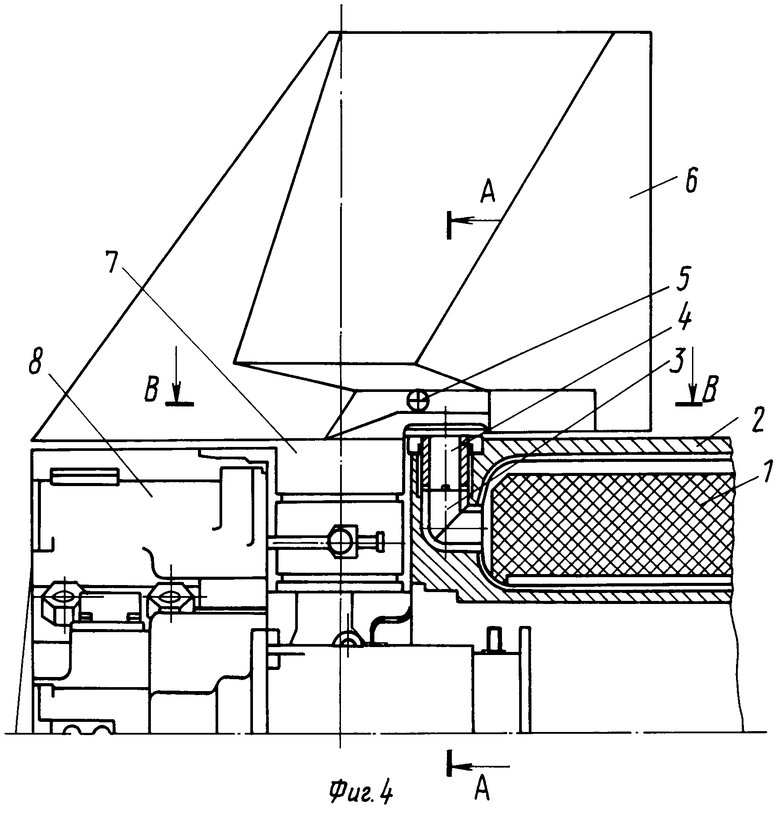
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4044970, кл | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |

