Изобретение относится к области информационных и телекоммуникационных технологий и может использоваться в системах управления силовых структур, в системах управления, применяемых при возникновении аварий и чрезвычайных ситуаций.
Автоматизированные системы управления, используемые для решения задач в условиях аварий, в чрезвычайных ситуациях и в военных целях, имеют стационарную и подвижную составляющие (подсистемы), каждая из которых имеет собственную локальную вычислительную сеть (ЛВС). При создании таких систем особое внимание уделяется повышению их мобильности, оперативности и быстродействия. Их применение имеет следующие особенности:
- в месте постоянной дислокации готовится и постоянно обновляется информация, которая будет использована подвижной составляющей при выполнении поставленной задачи;
- при получении команды на выполнение поставленной задачи информация из баз данных стационарной составляющей переписывается в базы данных подвижной составляющей;
- вследствие большого объема передаваемой при этом информации и малого отводимого на это времени невозможно использование для переписи имеющихся для обеспечения взаимодействия подразделений и органов управления относительно низкоскоростных стандартных средств передачи данных со стандартными средствами обеспечения безопасности информации, требуется использовать высокоскоростные локальные сети;
- предусматриваются меры по обеспечению безопасности информации, причем к стационарной и к подвижной составляющим в этом отношении предъявляются разные требования, и в них могут действовать разные наборы правил и алгоритмов обеспечения безопасности информации;
- подключение ЛВС подвижной составляющей непосредственно к ЛВС стационарной составляющей нецелесообразно (а иногда и невозможно) по следующим причинам:
а) администрирование объединенной ЛВС существенно усложняется вследствие динамического изменения количества ЭВМ в сети и несовпадения в практических случаях множеств действующих в обеих частях сети протоколов;
б) такое подключение может оказаться невозможным либо дорогостоящим вследствие несовместимости правил и алгоритмов обеспечения безопасности информации в объединяемых ЛВС;
- аппаратурные компоненты подвижной составляющей имеют улучшенные характеристики по сравнению со стационарными в части веса и габаритов, энергопотребления и скорости развертывания.
Известен комплекс средств автоматизации командного пункта тактического соединения (ПМ РФ №41889, G06F 15/16, 2004 г.).
Устройство содержит комплекс средств передачи данных для связи с внешними абонентами, с которыми также связан выход речевой телефонной линии комплекса, локальную вычислительную сеть ЭВМ, связывающую между собой ЭВМ автоматизированных рабочих мест и ЭВМ отображения, графопостроитель, проектор (средство отображения коллективного пользования) и средства итогового документирования, позволяет организовать параллельную работу 26 автоматизированных рабочих мест (АРМ) и обмен информацией с 52 абонентами. Данный известный комплекс может быть представлен либо в стационарном, либо в мобильном исполнении.
Недостатком известного комплекса является то, что в нем не предусматривается одновременная работа стационарной и подвижной частей комплекса, быстрое обновление баз данных подвижной части и решение возникающих при этом проблем обеспечения безопасности информации.
Известен комплекс средств автоматизации управления войсками для командно-штабной машины (ПМ РФ №37838, G01S 13/00, 2003 г.). Комплекс содержит устанавливаемые на средстве передвижения блоки видеонаблюдения, измерения дальности до объекта, определения местоположения средства передвижения, сбора данных, приема и передачи данных со средствами защиты информации и блок управления в виде ЭВМ с антивибрационными элементами крепежа. На ЭВМ имеется многозадачная русифицированная операционная система и программное обеспечение, позволяющее вести документированный информационный обмен абонентов по каналам связи с одновременным расчетом специализированных задач. Данное известное устройство предназначено для обеспечения взаимодействия между отдельными подразделениями войск тактического звена. Однако в нем не предусмотрена возможность подключения к ЛВС стационарного комплекса для быстрого и безопасного обновления информации в ЭВМ известного комплекса.
Наиболее близким по технической сущности к предлагаемой системе (первый вариант) является подвижный комплекс средств автоматизации управления по пат. РФ на изобретение №2266563, G06F 17/60, 2005 г., принятый за прототип.
Укрупненная блок-схема устройства-прототипа представлена на фиг.1, где обозначено: 1 - подвижный комплекс средств автоматизации управления; 2 - средства передачи данных; 3 - средства связи; 41-4n - автоматизированные рабочие места (АРМ); 51-5n - ЭВМ из состава АРМ; 6 - ЛВС, 7 - выходы ЭВМ для подключения к ЛВС.
Средства передачи данных 2, средства связи 3, АРМ и ЭВМ в совокупности составляют технические средства комплекса.
АРМ 41-4n содержат соответствующие ЭВМ 51-5n, которые через выходы 7 подключены к ЛВС 6. Выход 7 обеспечивает электрический (или оптический) интерфейс и обмен данными по ЛВС 6, например, в соответствии со стандартом Ethernet. К этой же ЛВС 6 подключены средства связи 3 и средства передачи данных 2.
Устройство-прототип работает следующим образом. Должностные лица, имеющие доступ к системе и информации в соответствии с программой разграничения доступа, формируют на ЭВМ 51-5n документы, справки, распоряжения и т.д., требующие передачи абонентам, как на пункте управления, так и внешним абонентам. Для этого должностное лицо выбирает из базы данных необходимый документ и заполняет его реквизиты. Затем выбирает таблицу абонентов и, отметив нужного адресата, отправляет документ, который передается средствами передачи данных 2 и далее средствами связи 3 после обработки аппаратурой криптозащиты (входит в состав средств передачи данных 2). Входящее сообщение от средств связи 3 после раскрытия данных аппаратурой криптозащиты, после его сборки из кодограмм и квитирования поступает в соответствии с его адресно-служебной частью и реквизитами на ЭВМ абонента. В целях управления органами тылового и технического обеспечения на ЭВМ 51-5n решаются задачи обработки картографической информации, автоматизированного обмена информацией с вышестоящими и нижестоящими органами тылового (технического) обеспечения, управления нижестоящими органами тылового (технического) обеспечения как в автоматизированном, так и в неавтоматизированном режимах. Средства связи 3, кроме обмена данными, обеспечивают также телефонную связь (открытую и закрытую) с вышестоящими и нижестоящими пунктами управления (ПУ), радиосвязь при движении в колонне.
Недостатками устройства-прототипа являются ограниченные функциональные возможности, определяемые отсутствием реализации стационарной части комплекса, низкой пропускной способностью каналов передачи данных для обновления данных в ЭВМ подвижного комплекса средств автоматизации управления перед началом выполнения поставленной задачи.
Таким образом, целью изобретения является расширение функциональных возможностей системы.
Это достигается тем, что в автоматизированной системе управления, включающей первую подсистему, технические средства которой связаны локальной вычислительной сетью (ЛВС), согласно изобретению введена вторая подсистема, содержащая аналогичные технические средства, связанные локальной вычислительной сетью, при этом в ЛВС первой подсистемы одна из ЭВМ имеет дополнительный сетевой выход для связи с соответствующей ЭВМ из ЛВС второй подсистемы, имеющей аналогичный дополнительный сетевой выход, и для обмена данными между подсистемами системы используется ЛВС, сформированная путем соединения упомянутых выходов.
Схема предлагаемого устройства (первый вариант) представлена на фиг.2, где обозначено: 1, 8 - первая и вторая (соответственно подвижная и стационарная) подсистемы; 2 - аппаратура передачи данных; 3 - средства связи; 41-4m, 41-4n - АРМ; 51-5m, 51-5n - ЭВМ; n, m - количество АРМ в подвижной и стационарной подсистемах, 6 - ЛВС; 7 - выход ЭВМ; 9 - дополнительный сетевой выход выделенной ЭВМ; 5i и 5j - первая и вторая выделенные ЭВМ (в качестве выделенных ЭВМ 5i и 5j обозначены ЭВМ 51 соответствующей подсистемы); 10 - третья ЛВС.
Средства передачи данных 2, средства связи 3, АРМ и ЭВМ в совокупности составляют технические средства комплекса.
Предлагаемая автоматизированная система управления состоит из двух (первой и второй) подсистем: подвижной 1 и стационарной 8. Стационарная подсистема 8 для целей автоматизированного управления содержит технические средства (возможно в стационарном исполнении) того же назначения, что и в подвижной подсистеме 1: аппаратуру передачи данных 2, средства связи 3, АРМ 41-4м, в состав которых входят 51-5м ЭВМ. ЭВМ из состава АРМ в каждой из подсистем 1, 8 подключены к соответствующей ЛВС 6 через выход 7. В каждой из подсистем выделена ЭВМ (5i в первой подсистеме), имеющая дополнительный сетевой выход 9 для связи с выделенной ЭВМ 5j из ЛВС 6 второй подсистемы. Путем соединения выходов 9 обеих выделенных ЭВМ 5i и 5j образуется третья ЛВС 10.
Сформированная третья ЛВС имеет простую структуру с простым администрированием, и в ней применяются правила и алгоритмы, предусматривающие безопасный обмен данными между стационарной 8 и подвижной 1 подсистемами автоматизированной системы управления.
Для улучшения эксплуатационных и массогабаритных характеристик подвижной системы ее технические средства могут размещаться в компактных упаковках, например, в чемоданах или контейнерах.
Предлагаемая автоматизированная система управления функционирует следующим образом. Должностные лица, эксплуатирующие стационарную подсистему 8, в процессе повседневной деятельности формируют на ЭВМ АРМ исходящие документы и обрабатывают входящие документы от вышестоящих и нижестоящих органов управления. Технические средства стационарной подсистемы 8 при работе должностных лиц функционируют так же, как и в прототипе. При этом в базах данных стационарной подсистемы 8 формируется информация, которая будет использована при функционировании подвижной подсистемы 1, например, устройства-прототипа. При необходимости организации обмена данными между двумя подсистемами 1 и 8 автоматизированной системы управления, представленной на фиг.2, формируется ЛВС 10 путем соединения с помощью кабеля дополнительных сетевых выходов выделенных ЭВМ обеих подсистем. Эта ЛВС 10 используется должностным лицом, эксплуатирующим систему, для обмена данными между подсистемами стандартными средствами, имеющимися в составе системы.
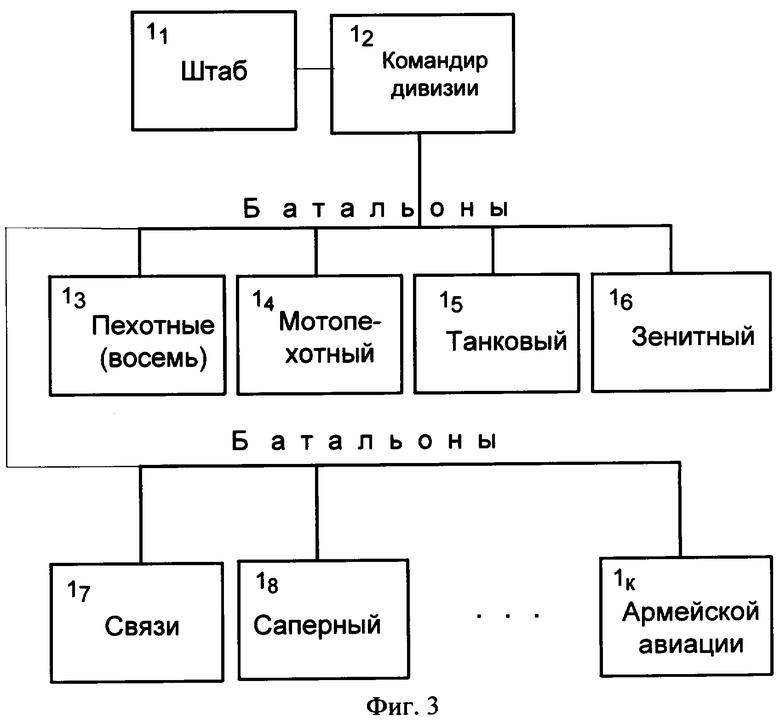
Существующие автоматизированные системы управления, так же как и предлагаемая, могут содержать более одной подвижной подсистемы. Например, в системе управления тактического звена должны быть предусмотрены комплексы для управления связью, артиллерией, авиацией и т.п. См., например, схему 5. Организация пехотной дивизии США на с.255 в книге Глазунов Н.К., Масленников П.Е. Сухопутные войска капиталистических государств. - 2-е изд., перераб. и доп. - М.: Воениздат, 1980. - 416 с., ил., принятая за прототип для второго варианта предлагаемой системы управления.
Укрупненная схема устройства-прототипа (для второго варианта) представлена на фиг.3, где обозначено: 11-1k - органы управления и подразделения из состава дивизии с соответствующими системами управления. Командир дивизии и штаб дивизии осуществляют руководство подчиненными подразделениями и органами управления. Система управления такой сложной организационной единицы, как дивизия, состоит из нескольких подсистем. Перед началом боевых действий подразделениям ставятся задачи. Например, для создания необходимой группировки артиллерии и ее распределения ей ставятся типовые тактические задачи. При этом создаются соответствующие организационные структуры для боя.
Недостатками устройства-прототипа являются ограниченные функциональные возможности, определяемые отсутствием реализации средств для оперативного обновления данных в ЭВМ подсистем перед началом выполнения поставленной задачи.
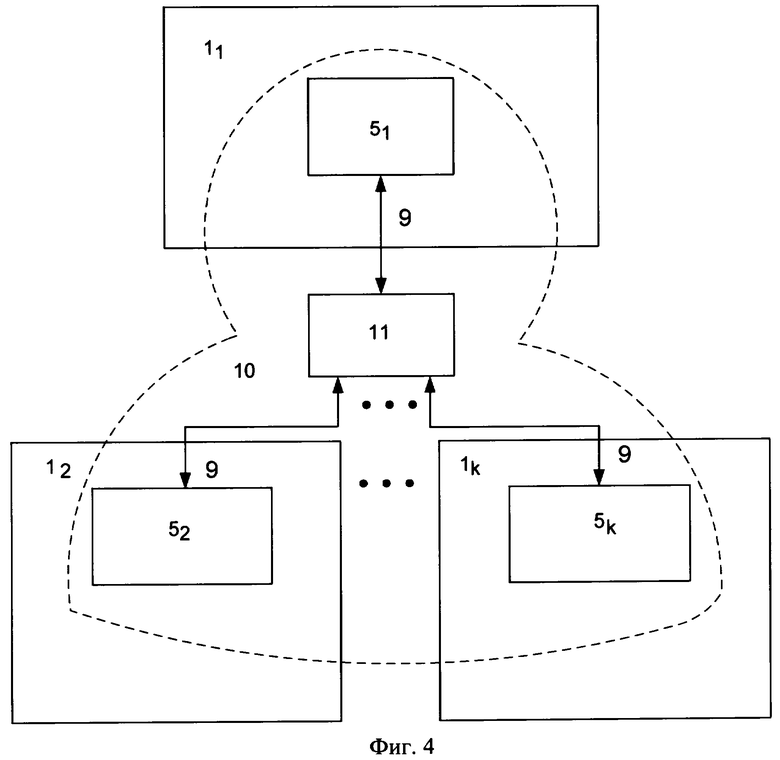
Для устранения указанных недостатков в автоматизированную систему управления, состоящую из нескольких подсистем, технические средства которых связаны отдельными локальными вычислительными сетями, согласно изобретению введен коммутатор, а в ЛВС первой подсистемы одна из ЭВМ имеет дополнительный сетевой выход для связи с соответствующими ЭВМ из ЛВС других подсистем, подключенный к коммутатору, к выходам которого подключены дополнительные сетевые выходы соответствующих ЭВМ остальных подсистем, и для обмена данными между подсистемами используется ЛВС, сформированная на основе коммутатора и ЭВМ с дополнительными сетевыми выходами.
На фиг.4 представлена схема второго варианта предлагаемой системы управления, где обозначено: 11-1k - k подсистем; 51-5k - выделенные ЭВМ; 9 - дополнительный сетевой выход выделенной ЭВМ; 10 - третья ЛВС; 11 - коммутатор. Для упрощения на фиг.4 не показаны следующие блоки, имеющиеся как в первом, так и во втором вариантах: 2 - аппаратура передачи данных; 3 - средства связи; 41-4м - АРМ; 6 - ЛВС.
Средства передачи данных 2, средства связи 3, АРМ и ЭВМ в совокупности составляют технические средства комплекса.
Второй вариант предлагаемой системы управления содержит k подсистем 11-1k, каждая из которых содержит технические средства (возможно в стационарном исполнении): аппаратуру передачи данных 2, средства связи 3, АРМ 41-4мj (на фиг.4 не показаны), в состав которых входят ЭВМ 51-5мj, мj - количество АРМ в j-й подсистеме. ЭВМ из состава АРМ в каждой из подсистем 1 подключены к соответствующей ЛВС 6 через выход 7 (на фиг.4 не показаны). В каждой из подсистем выделена ЭВМ (5i в первой подсистеме, обозначенная как 51), имеющая дополнительный сетевой выход 9 для связи с выделенными ЭВМ 5j (обозначены как 52-5к в других подсистемах, при этом j=2, 3, ... k) из ЛВС 6 других подсистем. Путем соединения через коммутатор 11 выходов 9 выделенных ЭВМ 5i и совокупности выделенных ЭВМ 5j образуется третья ЛВС 10. В этом варианте выделенные ЭВМ подсистем подключаются к коммутатору 11 соответствующими кабелями.
Предлагаемая автоматизированная система управления (второй вариант) функционирует следующим образом.
Должностные лица, эксплуатирующие подсистемы 1j (j=1...k), при выполнении своих обязанностей эксплуатируют соответствующие подсистемы аналогично первому варианту. В ЛВС 10, образованной коммутатором 11 и подключенными к нему дополнительными сетевыми выходами 9 выделенных ЭВМ, действует общий для всех выделенных ЭВМ стек сетевых протоколов, и единые правила, и алгоритмы, предусматривающие безопасный обмен данными между подсистемами автоматизированной системы управления. Обмен данными между подсистемами при наличии нескольких подсистем в составе системы организуется стандартными средствами, имеющимися в составе системы, аналогично тому, как описано в первом варианте.
Для повышения удобства и оперативности при работе с автоматизированной системой управления ЛВС между выделенными ЭВМ подсистем строится на основе оборудования одного из стандартов беспроводных технологий (см. например, С.Гордейчик, Еще раз про WLAN, BYTE Россия, 2005 г., №8.
Известно устройство беспроводной сети в офисе, опубликованное в статье В.Максимова «Многообразное применение беспроводных технологий», PC Week/RE №(484) 22'2005 от 21.06.2005, рубрика: NetWeek, стр.21, рис.2, принятое за прототип для третьего варианта предлагаемой системы.
Недостатками устройства-прототипа являются ограниченные функциональные возможности, определяемые отсутствием реализации средств для оперативного обновления данных в ЭВМ подсистем перед началом выполнения поставленной задачи.
Для устранения указанных недостатков в автоматизированную систему управления, состоящую из нескольких подсистем, технические средства которых связаны отдельными локальными вычислительными сетями, согласно изобретению введены точка доступа и другие радиосредства, в совокупности обеспечивающие функционирование беспроводной ЛВС, а в ЛВС первой подсистемы одна из ЭВМ имеет дополнительный сетевой выход для связи с соответствующими ЭВМ из ЛВС других подсистем, подключенный к точке доступа, причем аналогичные дополнительные сетевые выходы соответствующих ЭВМ из ЛВС других подсистем подключены к радиосредствам, и для обмена данными между подсистемами используется эта беспроводная ЛВС.
Укрупненная схема предлагаемой системы связи (третий вариант) представлена на фиг.5, где обозначено: 1-1k подсистемы (k - количество подсистем); 51-5k - выделенные ЭВМ; 9 - дополнительный сетевой выход; 10 - ЛВС; 12 - точка (узел) доступа, поддерживающая стандарт беспроводной технологии; 131-13k - радиостанции, работающие по тому же стандарту беспроводной технологии, что и точка доступа 12. Для упрощения на фиг.5 не показаны следующие блоки, имеющиеся в предлагаемой системе в первом, втором, а также и в третьем вариантах: 2 - аппаратура передачи данных; 3 - средства связи; 41-4мj - АРМ; 51-5мj - ЭВМ; мj - количество АРМ в j-й подсистеме; 6 - ЛВС.
Средства передачи данных 2, средства связи 3, АРМ и ЭВМ в совокупности составляют технические средства комплекса. Радиостанции 13 и точка доступа 12 в совокупности составляют радиосредства.
Предлагаемая система управления (третий вариант) обеспечивает одновременную связь одной подсистемы с несколькими другими подсистемами с применением беспроводных технологий.
Первая подсистема 11 через дополнительный сетевой выход 9 выделенной ЭВМ 51 подключается к точке доступа 12, а дополнительные сетевые выходы 9 выделенных ЭВМ 52-5k других подсистем подключены к соответствующим радиостанциям 132-13k, работающим по тому же стандарту беспроводной технологии, что и точка доступа 12. Совместное функционирование точки доступа 12 и радиостанций 131-13k обеспечивает построение локальной беспроводной сети, по которой осуществляется обмен данными между подсистемами.
Предлагаемая автоматизированная система управления в третьем варианте функционирует следующим образом.
Должностные лица подсистем при выполнении своих обязанностей эксплуатируют соответствующие подсистемы аналогично первому варианту. В ЛВС 10, образованной точкой доступа 12, радиостанциями 13, подключенными к дополнительным сетевым выходам выделенных ЭВМ 9 и выделенными ЭВМ 5, действует общий для всех выделенных ЭВМ 5 стек сетевых протоколов и единые правила и алгоритмы, предусматривающие безопасный обмен данными между подсистемами автоматизированной системы управления. Обмен данными между подсистемами с использованием беспроводных технологий организуется стандартными средствами, имеющимися в составе системы, аналогично тому, как это делается в случае первого и второго вариантов заявляемой системы управления.
Большие автоматизированные системы управления строятся поэтапно и могут содержать подсистемы, отличающиеся по аппаратно-программному исполнению, по действующим в них протоколам, а также по наборам правил и алгоритмов обеспечения безопасности информации. В этом случае также может быть невозможным обмен данными между подсистемами при простом подключении ЛВС одной подсистемы к ЛВС другой подсистемы. Предлагаемое устройство можно применить и для обеспечения безопасного обмена данными между подсистемами стационарной автоматизированной системы управления, то есть когда все подсистемы имеют стационарное исполнение.
Предлагаемое техническое решение реализуется с помощью широко известных и доступных изделий, обладает более широкими функциональными возможностями, лучшими тактико-техническими характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС СВЯЗИ НАДВОДНОГО КОРАБЛЯ | 2013 |
|
RU2548023C2 |
| МОБИЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ УЗЕЛ СВЯЗИ | 2017 |
|
RU2645742C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИНЖЕНЕРНОГО ОБЕСПЕЧЕНИЯ, АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ, СВЯЗИ И ЭЛЕКТРОПИТАНИЯ (КСИАС) | 2010 |
|
RU2445693C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2016 |
|
RU2629426C1 |
| КОРАБЕЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СВЯЗИ | 2023 |
|
RU2819000C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2022 |
|
RU2788156C1 |
| Комплекс автоматизированного управления связью | 2023 |
|
RU2822615C1 |
| КОМПЛЕКС ТЕЛЕИНФОРМУРОЛОГИИ | 1999 |
|
RU2172068C2 |
| ПОДВИЖНЫЙ МУЛЬТИСЕРВИСНЫЙ ТЕЛЕКОММУНИКАЦИОННЫЙ КОМПЛЕКС | 2022 |
|
RU2800724C1 |


Изобретение относится к области информационных и телекоммуникационных технологий и может использоваться в системах управления силовых структур, в системах управления, применяемых при возникновении аварий и чрезвычайных ситуаций. Технический результат - расширение функциональных возможностей системы. Согласно первому варианту система управления содержит две подсистемы с аналогичными техническими средствами. Технические средства в каждой подсистеме связаны с локальной вычислительной сетью (ЛВС). В ЛВС первой подсистемы одна из ЭВМ имеет дополнительный сетевой выход для связи с аналогичным выходом соответствующей ЭВМ из ЛВС второй подсистемы. Для обмена данными между подсистемами использована ЛВС, сформированная путем соединения упомянутых выходов. Согласно второму варианту в систему введен коммутатор, а в ЛВС первой подсистемы одна из ЭВМ имеет дополнительный сетевой выход, подключенный к коммутатору, к выходам которого подключены дополнительные сетевые выходы соответствующих ЭВМ других подсистем. Для обмена данными использована ЛВС, сформированная на основе коммутатора и ЭВМ с дополнительными сетевыми выходами. Согласно третьему варианту в систему управления введены точка доступа и другие радиосредства, в совокупности обеспечивающие функционирование беспроводной ЛВС. В ЛВС первой подсистемы одна из ЭВМ имеет дополнительный сетевой выход, подключенный к точке доступа. Аналогичные дополнительные сетевые выходы соответствующих ЭВМ из ЛВС других подсистем подключены к радиосредствам. Для обмена данными используют эту беспроводную ЛВС. 3 н. и 2 з.п. ф-лы, 5 ил.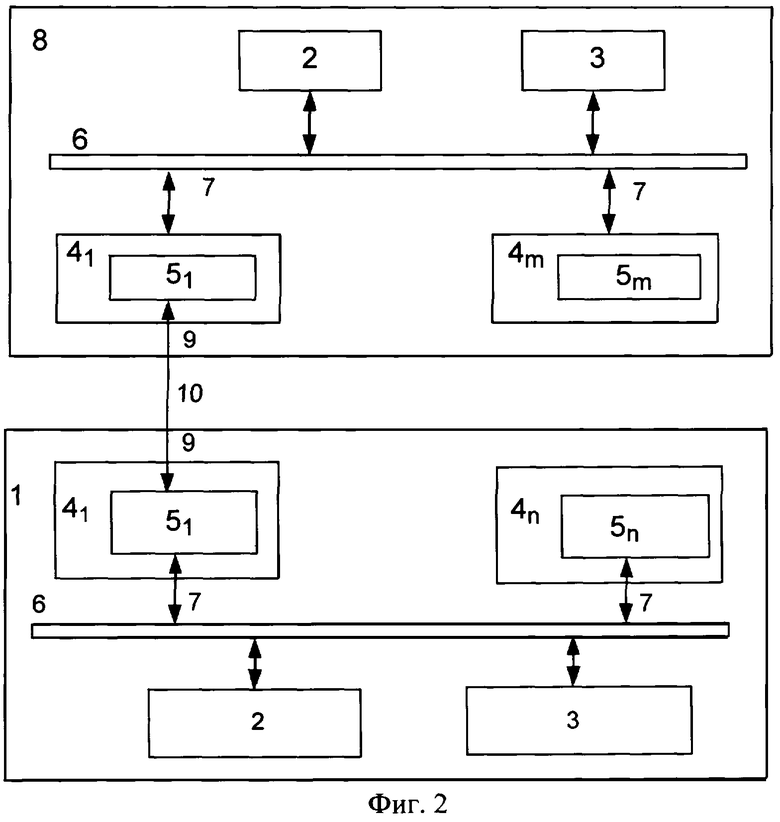
| ПОДВИЖНЫЙ КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ | 2004 |
|
RU2266563C1 |
| ПОДВИЖНЫЙ КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ | 2003 |
|
RU2263960C2 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА БЕРЕГОВОГО БАЗИРОВАНИЯ | 2000 |
|
RU2176818C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОБРЫВА ЛЕНТЫ НА РЕБРОСКЛЕИВАЮЩЕМ СТАНКЕ ДЛЯ ФАНЕРЫ | 1934 |
|
SU37838A1 |
| RU 41889 U1, 10.11.2004 | |||
| Дефибрерный камень | 1935 |
|
SU47540A1 |
| Устройство для исследования процессов теплоотдачи | 1987 |
|
SU1529089A1 |
| US 5931877 A, 03.08.1999 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ ЧЕРВЯЧНЫМ МЕХАНИЗМАМ ПАДАЮЩИХ ГРЕБНЕЙ ЛЬНЯНЫХ РОВНИЧНЫХ И ЛЕНТОЧНЫХ МАШИН | 1949 |
|
SU81056A1 |
| 0 |
|
SU250491A1 | |

