Изобретение относится к сельскому хозяйству, в частности к почвообрабатывающим орудиям для безотвальной обработки почвы. Известные способы и орудия для безотвальной обработки почвы, такие как чизельные и дисковые плуги, плоскорезы - глубокорыхлители, плуги с вырезными отвалами используют силу тяги трактора, являются энергоемкими и не обеспечивают качество работы. Известно также почвообрабатывающее орудие итальянской фирмы Falc и устройство для послойного рыхления почвы (SU 1658805АВ, БИ №23 от 23.06.91), содержащее продольную балку с закрепленными в разных ее частях рабочими органами. Посредством шарниров, рычага и кривошипа балка подвешена на раме с возможностью колебаний в продольно-вертикальной плоскости, так что рабочие органы описывают в почве эллипсообразные циклоиды.
Недостатком указанного устройства является то, что оно производит послойное рыхление, при этом образуются на дне борозды гребни и огрехи между соседними рабочими органами, неоднородность обработки почвы и высокие энергозатраты. Близко к известному устройству (SU 1658805) можно отнести секцию почвообрабатывающего орудия (RU 2074590, С1, 10.03.1997), включающую в себя раму, на которой установлена приводная звездочка с кривошипом, Г-образный рычаг, ползун, коромысло и штангу. Рабочий орган (стрельчатая лапа) движется в почве, совершая плоскопараллельные движения по траектории грушевидной формы, геометрическая большая ось которых наклонена к горизонту, т.е. траектории движения рабочих органов обоих известных устройств аналогичны (см. фиг.3 RU 2074590) и фиг.2 (SU 1658805). При глубокой обработке известными орудиями неплодородный слой выворачивается на поверхность поля, а верхний плодородный наоборот перемещается на дно борозды и не может активно участвовать в развитии и росте растений, в формировании урожая.
Особенно важно сохранить активный гумусовый верхний слой почвы на склоновых землях, подверженных водной эрозии.
Цель изобретения - снижение энергозатрат при глубокой (до 30 см) обработке почвы на склонах, а также подверженных водной эрозии почвах, повышение качества обработки почвы.
Поставленная цель достигается тем, что безотвальная обработка почвы осуществляется почвообрабатывающим орудием, рабочие органы которого приводятся в движение с помощью кривошипно-коромыслового механизма от вала отбора мощности (ВОМ) трактора.
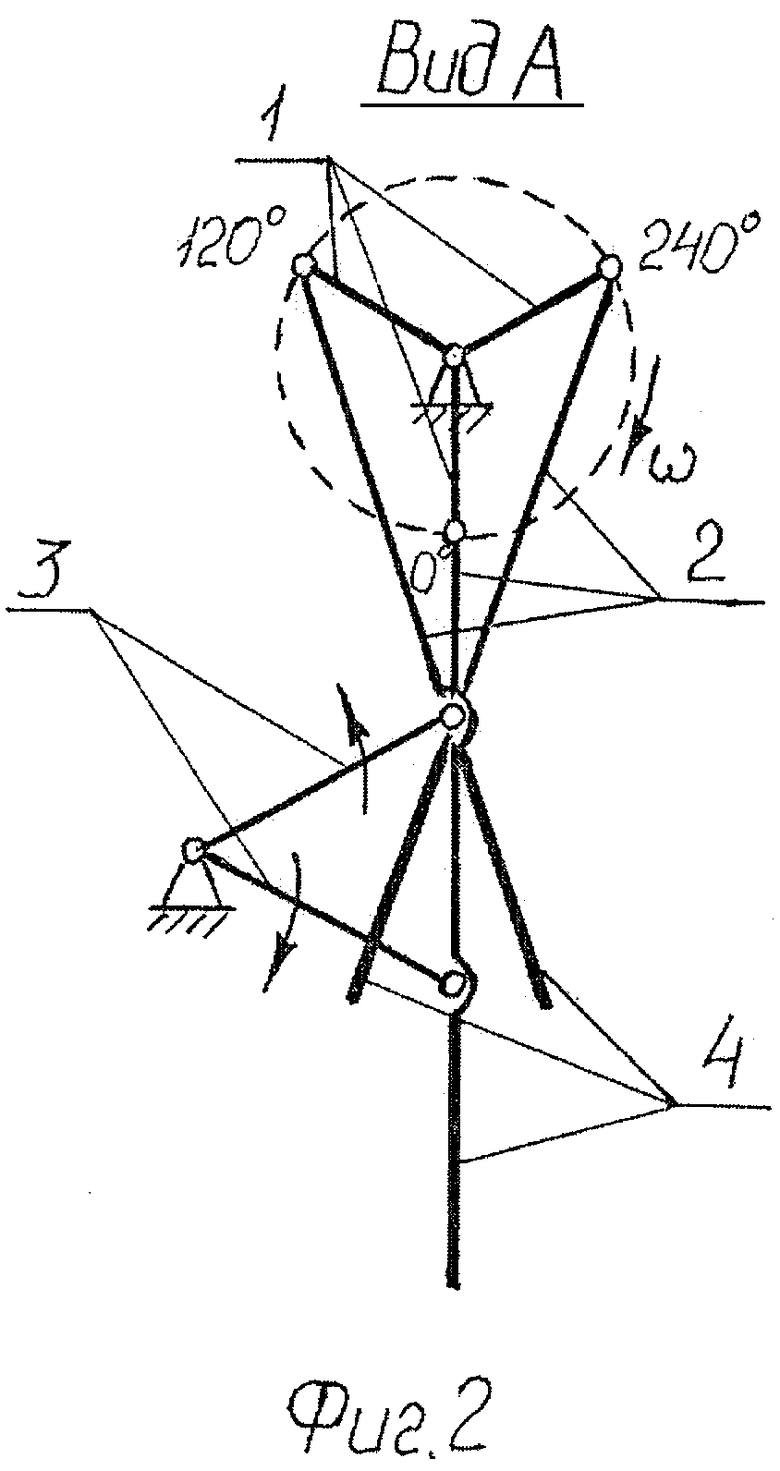
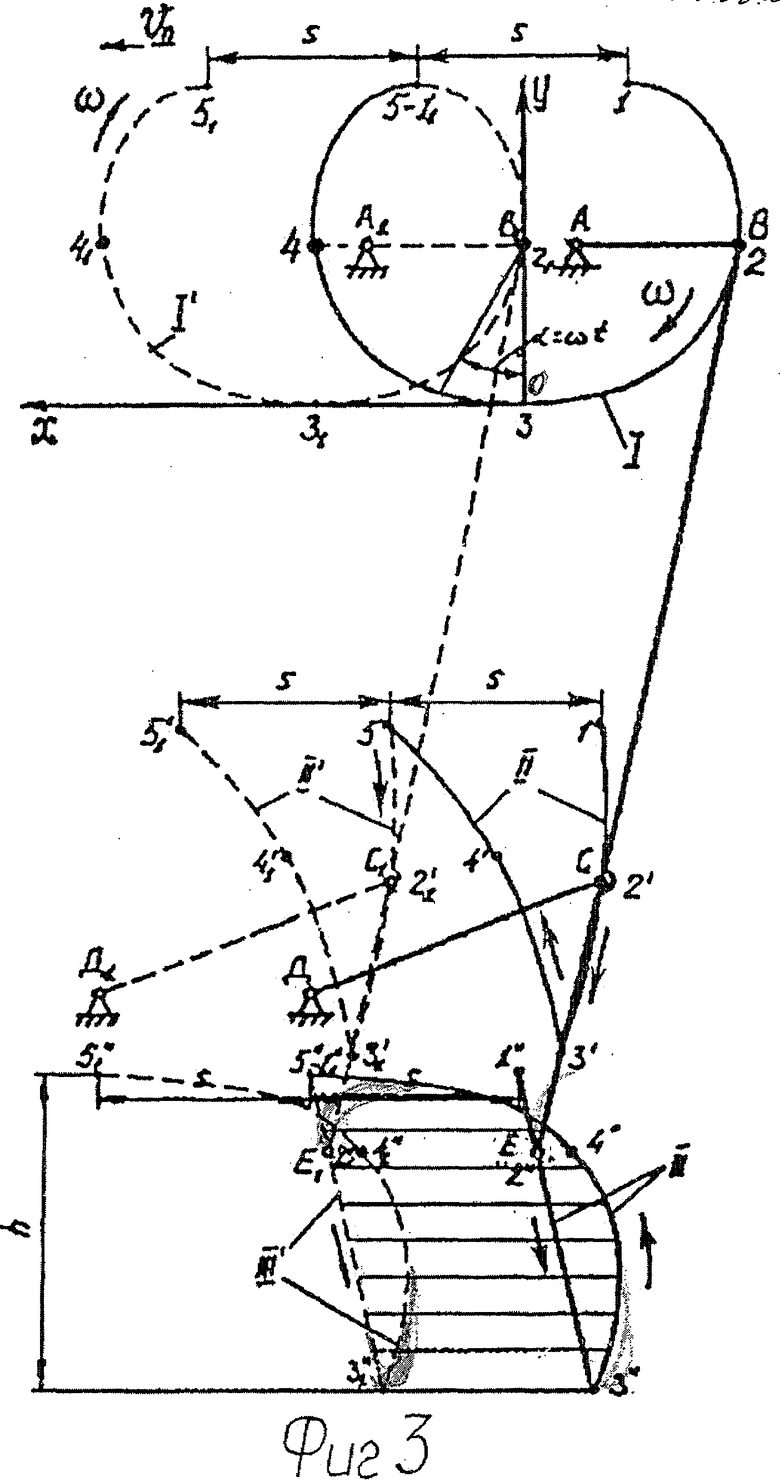
На фиг.1 изображена схема орудия для безотвальной глубокой обработки почвы; на фиг.2 - вид А и на фиг.3 - схема кривошипно-коромыслового механизма и траектории движения характерных точек основных его звеньев.
В качестве кривошипов использован коленчатый вал 1, шатунные шейки которого соединены с шатунами 2, а последние - с коромыслами 3.
Исполнительные рабочие органы 4 сменные (лопатообразные, полевые крючки, черенковые ножи, вилообразные и т.д.) закреплены жестко на шатунах 2. Привод на коленвалы 1 осуществляется через конический редуктор 5 с двумя выходами на каждую половину ширины захвата орудия. Поэтому число рабочих органов (n) устанавливается четным (от 4 до 10). Причем каждый соседний кривошип имеет угловое смещение αy=(360°: n)2. При этом вход рабочих органов в почву будет осуществляться попарно на левом и правом коленвалах, установленных симметрично относительно продольной оси агрегата. Например при n=4 порядок будет такой: 1-4, 2-3; при n=6: 1-6, 2-5, 3-4, при n=8: 1-8, 2-7, 3-6, 4-5; при n=10: 1-10, 2-9, 3-8, 4-7, 5-6.
Такой порядок работы способствует более равномерному вхождению рабочих органов в почву, предотвращает создание так называемых «мертвых зон» механизма и обеспечивает продольную устойчивость движения почвоперерабатывающего агрегата.
Кривошипно-коромысловый механизм (фиг.3) состоит из ведущего звена - кривошипа АВ, шатуна ВС, коромысла ДС и почвообрабатывающего рабочего органа СЕ. При работе орудия т.В кривошипа за один оборот совершает сложное движение по удлиненной циклоиде (траектория I на фиг.3), коромысло (т.С) двигается по траектории II и исполнительный рабочий орган (т.Е) - по траектории III.
Для расчета координат {хi,yi) траектории движения (т.В) кривошипа получены уравнения: хi=rк(αi/λ+sinαi) и yi=rк(1-cosαi), где rк=АВ - радиус кривошипа, αi=ωкt - угол поворота кривошипа, λ=Vк/Vn - кинематический параметр, Vк=ωкrк - окружная скорость кривошипа, Vn - поступательная скорость движения трактора, ωк - угловая скорость кривошипа.
Направление оси «х» совпадает с направлением движения трактора, а ось «y» перпендикулярна к горизонтальной плоскости. За начало координат (т.О) принято крайнее нижнее положение фиксированной точки кривошипа (т.В), а его вращение - по часовой стрелке.
Участки траекторий 1, 2, 3; 1′, 2′, 3′ и 1′′, 2′′, 3′′ (фиг.3) соответствуют заглублению (входу) рабочих органов в почву, а 3, 4, 5; 3′, 4′, 5′ и 3′′, 4′′, 5′′ - выглублению или выходу рабочих органов из почвы. Сплошными линиями указаны траектории за один оборот кривошипа, пунктирными за второй его оборот. Отрезаемый пласт, площадь сечения которого приближенно равна произведению глубины обработки (h) на подачу (s), сохраняет структуру слоев почвы.
Работоспособность кривошипно-коромыслового механизма обеспечивается его геометрическими параметрами: радиус кривошипа (rк) равен половине заданной глубины обработки (h); длина шатуна lш=4rк; высота рабочего органа равна глубине обработки и длина коромысла lк=2rк.
При этих соотношениях основных звеньев механизма получается наименьшая длина пути почти вертикального резания или кратчайший путь рабочего органа в почве, что способствует снижению энергоемкости.
Снижение энергозатрат при обработке почвы объясняется также использованием деформаций скалывания и отрыва вместо сжатия и сдвига как более энергоемких в известных устройствах.
Кроме того при этом уменьшается буксование движителей трактора и соответственно мощность на него, так как горизонтальная составляющая реакции почвы в процессе входа рабочих органов в нее совпадает с направлением движения агрегата и создает подталкивающее усилие.
Качество крошения почвы регулируют изменением подачи на один рабочий орган (s) путем увеличения или уменьшения поступательной скорости трактора, а также частотой вращения кривошипов (коленвалов).
При постоянной окружной скорости или частоте вращения коленвалов с увеличением поступательной скорости трактора подача увеличивается. Глубину обработки почвы (h) также регулируют с помощью опорных лыж или колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2088061C1 |
| СПОСОБ БЕЗОТВАЛЬНОЙ ОБРАБОТКИ СКЛОНОВЫХ ЗЕМЕЛЬ | 2011 |
|
RU2487518C2 |
| Способ безотвальной глубокой обработки почвы и устройство для его осуществления | 2016 |
|
RU2652820C2 |
| Почвообрабатывающее орудие | 1981 |
|
SU1009299A2 |
| РОТАЦИОННЫЙ РАБОЧИЙ ОРГАН | 2005 |
|
RU2319328C2 |
| Рабочий орган для внесения минеральных удобрений одновременно с безотвальной обработкой почвы | 1981 |
|
SU993841A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1993 |
|
RU2081524C1 |
| Почвообрабатывающее орудие | 1986 |
|
SU1435176A1 |
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА | 2001 |
|
RU2216137C2 |
| УДАРНЫЙ МЕХАНИЗМ | 2006 |
|
RU2343280C2 |
Изобретение относится к сельскохозяйственному машиностроению. Почвообрабатывающее орудие содержит исполнительные рабочие органы и их привод, выполненный в виде кривошипно-коромыслового механизма. Кривошипно-коромысловый механизм соединен с валом отбора мощности трактора. Радиус кривошипа (rк) равен половине заданной глубины обработки почвы (h). Длина шатуна (lm) определяется по зависимости lm=4rк. Длина коромысла (lк) определяется по формуле lк=2rк. Высота рабочего органа равна глубине обработки почвы (h). Число рабочих органов - четное и находится в пределах 4÷10. Рабочие органы установлены на коленчатом валу с угловым смещением, равным αy=(360°:n)2. Кривошип при работе совершает сложное движение по траектории, координаты точек которой описываются уравнениями по осям: xi=rк(αi/λ+sinαi), yi=rк(1-cosαi). Абсолютная скорость кривошипа определяется по формуле Vа=Vк(1+1/λ2+cosαi)0,5. Ускорение любой точки кривошипа - α=rкωк 2. Такое конструктивное выполнение позволит снизить энергозатраты и повысить качество основной обработки почвы на склонах, а также на почвах, подверженных водной эрозии. 1 з.п. ф-лы, 3 ил.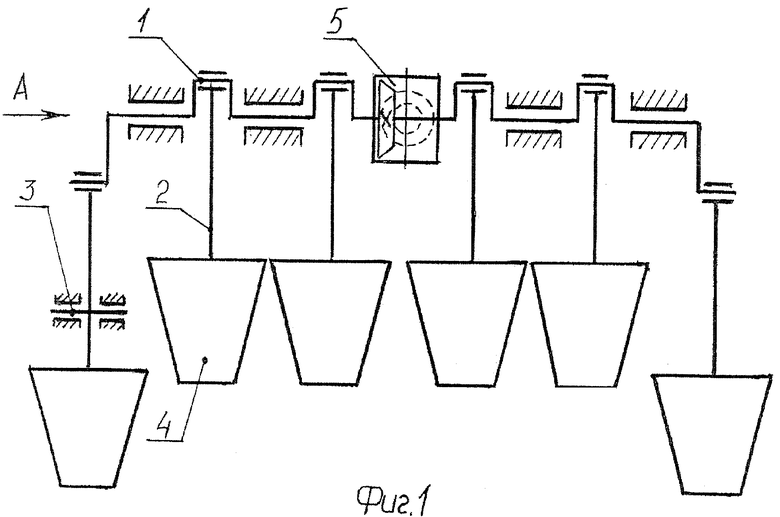
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2088061C1 |
| СЕКЦИЯ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 1994 |
|
RU2074590C1 |
| 1972 |
|
SU414954A1 | |
| Почвообрабатывающая машина | 1933 |
|
SU41979A1 |
| УСТРОЙСТВО ДЛЯ РЫХЛЕНИЯ ПОЧВЫ | 2003 |
|
RU2252520C1 |

