Изобретение относится к машинам ударного действия, их аккумуляторам энергии и управлению параметрами снаряда при ударе. Предлагаемый механизм может применяться для разрушения, дробления и уплотнения различных материалов в горной, строительно-дорожной, металлургической и машиностроительной отраслях промышленности. Привод механизма может быть осуществлен с помощью электродвигателя, гидравлического двигателя, ДВС или пневматического двигателя.
В настоящее время среди машин ударного действия очень широкое распространение получили молоты, использующие гидравлические потоки масла базовых экскаваторов. Это молоты ведущих фирм: Раммера (Финляндия), Круппа (Германия), Ниппона, Фурукава, NPK (Япония), INDBCO (Италия), ОАО "Тверьтехоснастка" (Россия) и много других. Анализируя их технические характеристики, необходимо отметить их очень низкие показатели энергии единичного удара и ударной мощности, передаваемой объектам обработки. Например, в конструкциях одной из ведущих мировых производителей молотов фирмы "Раммер" насос базового экскаватора имеет мощность 180 кВт с расходом масла от 5 до 6,6 л/с, а фирма выпускает молоты с предельной энергией удара только 15 кДж при частоте нанесения ударов от 5 до 7,5 Гц, массе молота 5800 кг и общей массе экскаватора 100 т. Технические характеристики насосов базовых экскаваторов, на которых устанавливаются эти молоты, позволяют повышать энергию и мощность удара на один порядок. Несмотря на это, почти во всех конструкциях машин ударного действия для активизации разгона ударной массы используют дополнительные внешние источники энергии. Они различные по происхождению: пневматические, гидравлические, механические, взрывные от порохового заряда, от ДВС, вакуумные, электрические и т. п. В технической литературе и авторских свидетельствах им дано научное название "активные рабочие органы строительных машин". В других технологических процессах, например рыхлении грунтов, когда не хватает энергии базовой машины, применяют наложение вибрационных колебаний на зуб рыхлителя. Это является настоящей "активизацией рабочего органа". Дополнительные внешние источники машин ударного действия можно назвать "посредниками" или точнее - "паразитами". Один из главных показателей удара - продолжительность его действия. Чем меньше продолжительность разгона (при одинаковом перемещении), тем эффективнее удар (если говорить относительно внешней траектории). В большинстве машин ударного действия потенциальная энергия бойка трансформируется в кинетическую через скорость свободного падения, которая зависит только от высоты и времени падения, и не зависит от величины разгоняемой массы, а разгон снаряда (бойка) всегда начинается после его полной остановки. Продолжительность перехода от взвода к разгону зависит от конструкции устройства, отделяющего снаряд от энергетического приводного потока и от типа запасенной при взводе потенциальной энергии, ее природы происхождения. В устройствах разрыва кинематической связи (в которых не используются внешние источники) этот период составляет десятые доли секунды, что является очень большим для ударного процесса. Продолжительность периода практического удара - от нескольких тысячных до миллионных долей секунды. Поэтому, при стартовой продолжительности, превышающей на три-четыре порядка общую продолжительность удара, очень трудно достичь эффективности процесса. В предлагаемом механизме используется динамическая составляющая энергии, которая зависит от величины разгоняемых масс.
1. Аналогом предлагаемого механизма является патент РФ "Способ взвода, разгона и нанесения удара снарядом и устройство для его осуществления при разрушении различных материалов" (1), в котором основной приводной поток разделяют на потенциальные энергетические потоки, и подают их одновременно при взводе снаряда для отжима снаряда от захватывающего устройства и для его перемещения, причем эти потоки в начальной фазе разгона полностью отделены от основного приводного потока и обеспечивают форсированное отсоединение захватывающего устройства от снаряда и форсированное перемещение этого устройства вслед за снарядом. Общее с предлагаемой конструкцией - одновременное создание, с помощью основного приводного потока, поток для подъема снаряда и поток потенциальной энергии его аккумуляторов при взводе, а при разгоне - отделение приводного энергопотока от разгоняющих снаряд энергопотоков. А также в том, что ствол выполнен подвижным относительно опорных шипов при помощи лафета, выполненного в виде стальной поковки с проушинами и резьбовым отверстием, в котором установлена направляющая с опорным шипом, жестко связанного пальцами с рукоятью экскаватора и подвижно со стволом, подвешенным на проушине штока гидроцилиндра экскаватора. Недостатки прототипа - привязанность только к гидравлическому гидропотоку и малая рабочая частота нанесения ударов (до двух-трех Герц).
2. В аналоге (2) представлен гидромолот с пружинным аккумулятором энергии, в котором пружины выполнены в виде одинаковых по высоте секций, установленных последовательно. Эта компоновка одинакова с компоновкой пружин в заявляемой конструкции. Оригинальная особенность аналога в том, что развиваемая энергия удара зависит от суммарной деформации пружин  (в квадрате). При этом сила сжатия их всегда постоянна, независимо от количества секций пружин. Поэтому, энергия привода, расходуемая на сжатие, не увеличивается с увеличением количества секций пружин при взводе, а энергия удара при разгоне увеличивается пропорционально количеству предварительно поджатых секций. Отличие предлагаемой конструкции в том, что эта замечательная способность увеличивается за счет кратности приводного коромысла.
(в квадрате). При этом сила сжатия их всегда постоянна, независимо от количества секций пружин. Поэтому, энергия привода, расходуемая на сжатие, не увеличивается с увеличением количества секций пружин при взводе, а энергия удара при разгоне увеличивается пропорционально количеству предварительно поджатых секций. Отличие предлагаемой конструкции в том, что эта замечательная способность увеличивается за счет кратности приводного коромысла.
3. Аналогом предлагаемого ударного механизма является дезаксиальный кривошипно-шатунный механизм (3), в котором кривошип может совершать полный оборот вокруг неподвижной оси и для которого выведены соотношения (аналитически или графоаналитически), связывающие перемещения ползуна с величиной угла поворота кривошипа по формуле:  где ϕ - угол качания кривошипа, lк - длина кривошипа, l - длина шатуна, l0 - расстояние от точки опоры кривошипа до оси траектории движения ползуна, причем l0=lк. Отличие нашего механизма в том, что кривошип выполнен в виде коромысла, качающегося относительно оси на угол 90° за счет обоймы и вращающегося приводного кривошипного вала. А вместо ползуна установлен снаряд.
где ϕ - угол качания кривошипа, lк - длина кривошипа, l - длина шатуна, l0 - расстояние от точки опоры кривошипа до оси траектории движения ползуна, причем l0=lк. Отличие нашего механизма в том, что кривошип выполнен в виде коромысла, качающегося относительно оси на угол 90° за счет обоймы и вращающегося приводного кривошипного вала. А вместо ползуна установлен снаряд.
4. Аналогом схемы предложенного устройства является принцип действия кривошипно-коромыслово-обоймного механизма, заложенный в авторском свидетельстве "Ударник для разрушения" (4). Основная его особенность - в создании принципиально новой схемы кинематического соединения кривошипа с ведущим звеном снаряда (коромыслом) через обойму с роликами, шарнирно установленную на средней оси коромысла и дающую возможность передавать приводные усилия на коромысло при его взводе и разрывать силовую цепь при разгоне с последующим плавным их кинематическом соединением при взводе для следующего удара. Положительная сторона этой схемы в том, что полностью исключаются реактивные силы, возникающие в момент перехода от взвода к разгону, резко сокращается время этого момента, а также передаются значительные рабочие нагрузки при качании коромысла в пределах до 10-12 Гц. Недостаток конструкции в том, что соотношения размеров элементов механизма не оптимизированы и из-за этого развиваемая энергия удара мала. Этот принцип действия заложен в предлагаемом механизме с корректировкой указанного недостатка, в результате которого создан алгоритм расчета инженерных конструкций.
5. "Ударный механизм", авторское свидетельство №2041791 (5), принят за прототип предлагаемого механизма. Он содержит корпус, выполненный подвижным относительно опорных шипов при помощи лафета, изготовленного в виде стальной поковки с проушинами и резьбовым отверстием, в котором установлена направляющая с опорным шипом, жестко связанного пальцами с рукоятью экскаватора и подвижно с корпусом, подвешенным на проушине гидроцилиндра экскаватора, размещенным в корпусе приводным валом с закрепленным на нем кривошипом, кинематически связанным со снарядом, состоящим из инструмента, шатуна, ползуна и коромысла, нижний опорный конец которого шарнирно соединен с цапфами, жестко установленными на корпусе, а средняя ось коромысла шарнирно соединена с роликовой обоймой, выполненной по радиусу, равному радиусу кривошипа, и верхним концом штока механизма замыкания, включающего пружину с двумя опорными чашками, установленными в стакане, имеющего снизу нажимную крышку, и шарнирно связанным с корпусом, и два упора, установленных - один на нижнем конце штока, а другой - в средней его части, над пружиной, а верхний конец коромысла шарнирно соединен с шатуном, связанным шарнирно с ползуном. Эта конструкция в сравнении с аналогами имеет следующие преимущества: 1. Ось пружины в период сжатия, при криволинейном движении средней оси коромысла, всегда прямолинейна за счет шарнирной установки стакана пружины относительно корпуса. Такая компоновка позволяет увеличивать энергию замыкающих пружин за счет установки дополнительных секций пружин при соблюдении нормальными условий их работы. 2. Наличие среднего упора на штоке пружины создает автоматическое самоторможение снаряда в случае удара по слабым грунтам или по воздуху за счет сжатия замыкающей пружины сверху (она работает в этом случае в режиме амортизатора), поэтому необходимость в специальной системе управления траекторией снаряда при его движении в объекте обработки полностью отпадает. 3. Наличие вилки на верхнем конце штока пружины обеспечивает гарантированное подвижное замыкание коромысла при его качательном движении в момент начала разгона. 4. Вилкообразная форма опорной части коромысла создает свободное прохождение кривошипа в период рабочего цикла. 5. Конструктивное исполнение снаряда в виде цепи: инструмент - ползун-шатун-коромысло, позволяет преобразовывать качательное движение ведущего звена (коромысла) в возвратно-поступательное движение инструмента и использовать при ударе две разновидности потенциальной энергии взвода - гравитационную и динамическую одновременно. Это способствует более полной трансформации энергии привода непосредственно в энергию удара. Но, вместе с тем, конструкция не лишена следующих недостатков. 1. При переходе от взвода к разгону нет быстрого (мгновенного) разъединения кривошипа с коромыслом через обойму из-за формы его геометрической конфигурации, которая при "выбеге" кривошипа оставляет не только кинематическое их соединение, но и силовое воздействие на коромысло. 2. Мала энергия единичного удара, так как коромысло при разгоне из-за вышеуказанного недостатка приобретает в точке контакта обоймы с кривошипом опору, превращающую разгоняемое коромысло в мультипликатор рычага первого рода, который незначительно увеличивает гравитационную составляющую энергии удара. 3. Обойма коромысла содержит много мелких деталей.
1. Ударный механизм, содержащий корпус, размещенный в корпусе приводной вал с закрепленным на нем кривошипом, кинематически связанным со снарядом, состоящим из инструмента, ползуна, шатуна, коромысла, обоймы, гидроцилиндра со штоком и пружиной, установленной в цилиндрическом корпусе, имеющем упоры для пружины, на цилиндрическом корпусе приварены две цапфы, с помощью которых он шарнирно соединен с корпусом, при этом верхний конец коромысла шарнирно соединен с шатуном, связанным шарнирно с ползуном, в котором, с целью создания фиксированной точки отсчета момента перехода от взвода к разгону в строго ориентированном положении, способствующему свободному движению коромысла и повышению энергии и мощности снаряда при разрушении горных пород и искусственных покрытий, механизм содержит опорный шип, причем корпус выполнен подвижным относительно опорного шипа при помощи лафета, изготовленного в виде стальной поковки с проушинами и резьбовым отверстием, в котором установлена направляющая с опорным шипом, жестко связанным пальцами с рукоятью экскаватора и подвижно с корпусом, подвешенным на проушине гидроцилиндра экскаватора, при этом нижняя часть коромысла выполнена в виде вилки, состоящей из двух параллельных щек, которые в нижней части через две оси шарнирно соединены с втулками, приваренными к боковым сторонам корпуса, а в середине вилки установлена ось, на которой шарнирно установлена обойма, с наружной стороны коромысла установлены две щеки вилки, жестко соединенные со штоком, имеющим два упора, которыми они сжимают пружину, при этом кривошип выполнен с выемкой в виде косого среза под углом 15° к линии ориентации кривошипа относительно коромысла, находящегося в основном положении в крайней верхней точке, а геометрические размеры кривошипа и коромысла определены через эксцентриситет кривошипа (е) и имеют следующие зависимости: хорда траектории качания средней оси коромысла при разгоне S=2·e, рабочая деформация замыкающей пружины вращающимся кривошипом ΔX=S=2·e, опорное плечо коромысла l1=1,414·e, длина коромысла lк=l1·u=1,414e·u, где u - заданная кратность коромысла, u=lK/l1, радиус кривошипа Rк=1,414·е, диаметр кривошипа Д=2·Rк=2,828·е, радиус внешней траектории, описываемой кривошипом RTP=RK·e=2,414·е и ее диаметр Дтр=4,828·е, толщина обоймы t=0,414·е, длина дуги обоймы - не менее 2·е, длина шатуна  расстояние от центра кривошипа до оси обоймы коромысла, находящегося в нижнем положении ОШн=е, и находящегося в верхнем положении ОШв=е+2·е+0,414·е=3,414·е, а расстояние от центра привода "О" до центра качания коромысла "К" равно ОК=2,236·е.
расстояние от центра кривошипа до оси обоймы коромысла, находящегося в нижнем положении ОШн=е, и находящегося в верхнем положении ОШв=е+2·е+0,414·е=3,414·е, а расстояние от центра привода "О" до центра качания коромысла "К" равно ОК=2,236·е.
2. С целью упрощения конструкции механизма, внутренняя поверхность обоймы коромысла выполнена по радиусу окружности, описываемой наружной поверхностью кривошипа, и снабжена роликами или фторопластовой накладкой, жестко соединенной с обоймой.
Далее мы хотели бы несколько подробнее и глубже раскрыть преимущества предлагаемой конструкции механизма в целом. С этой целью на фиг. 1 показано двенадцать положений геометрического центра кривошипа относительно его центра вращения "О", из которых первое и седьмое располагаются на линии ориентации кривошипа относительно коромысла ОШ7 (она же является и линией ориентации снаряда относительно корпуса) и определяют начало взвода (1) и начало разгона (7). В первом положении начинается передача крутящего момента, развиваемого кривошипом, коромыслу через обойму, имеющую возможность свободного поворота относительно средней оси коромысла. Вращаясь, кривошип поворачивает среднюю ось коромысла из первоначального нижнего положения Ш1 в седьмое, самое верхнее положение Ш7. При этом обойма, качаясь, передает силовую нагрузку привода коромыслу. Силовая передача заканчивается, как только вершина среза, находящегося в седьмом положении (C7), пройдет линию ОШ7. В этот момент силовой энергетический поток отключается от коромысла и оно под воздействием силы энергетического потока пружины начинает движение вниз, а кривошип поворачивает обойму относительно коромысла, но без силового воздействия. Это начало выбега кривошипа, при котором происходит одновременное движение кривошипа и коромысла навстречу друг другу. Обойма в начале выбега поворачивается верхней стороной кривошипа против часовой стрелки, а затем - нижней, в положениях 9, 10, 11, 12 противоположной стороной, поворачивает обойму по часовой стрелке относительно коромысла до тех пор, пока между внутренней поверхностью обоймы и наружной поверхностью кривошипа не исчезнет зазор. Это движение кинематическое без силовой передачи, и оно не создает сопротивлений коромыслу при разгоне снаряда. При выводе наших теоретических зависимостей была рассмотрена идеальная схема, при которой предполагалась оптимальная (100%) передача энергии и мощности привода снаряду. Для этого сделаны следующие допущения: а) удар всегда производится в крайнем нижнем положении снаряда при угле раскрытия коромысла ϕ0=90°, б) разрушаемый объект не деформируется, в) направление силы действия пружины всегда перпендикулярно коромыслу, г) промежутка времени между остановкой снаряда и началом взвода нет, д) потерями на трение пренебрегаем. Для реальных условий разрушения горных пород необходимо вводить корректировки на все эти допущения. При ударе по их поверхности необходимо время для проникновения снаряда и его перемещения на внутренней траектории. Это обеспечивается, если удар произведен не в крайнем нижнем положении, а несколько выше. Величина отклонения от нижнего крайнего положения определяется физико-механическими свойствами породы, условиями разрушения, конструктивными особенностями и многими другими факторами. Поэтому время выбега кривошипа всегда должно быть больше времени движения коромысла на воздушной траектории.
Обобщая глубже, раскроем достоинства предложенного механизма. 1. Высокая эффективность ударного процесса, позволяющая по-новому пересмотреть технологию многих процессов, например, добычу полезных ископаемых, разработку мерзлых грунтов, подземную разработку туннелей в скалистых породах и многих других. 2. Корректность инженерных расчетов рабочих органов и деталей механизма и чрезвычайная простота их изготовления, ремонта и эксплуатации при высокой надежности и долговечности. 3. Низкая себестоимость всех этих процессов. 4. Компактность расположения основных узлов и красивое, эстетическое восприятие конструкций. 5. Низкая энергоемкость, не имеющая в мировой практике аналогов по этим показателям. 6. Возможность применения энергетических потоков привода с любой природой происхождения и в любых условиях. Таким образом, эти преимущества приводят к достижению поставленной цели - повышению энергии единичного удара и мощности снаряда с одновременным снижением энергии его привода, и позволяют сделать вывод, что предложенное техническое решение соответствует критерию "Существенные отличия", которые в совокупности составляют его изобретательский уровень.
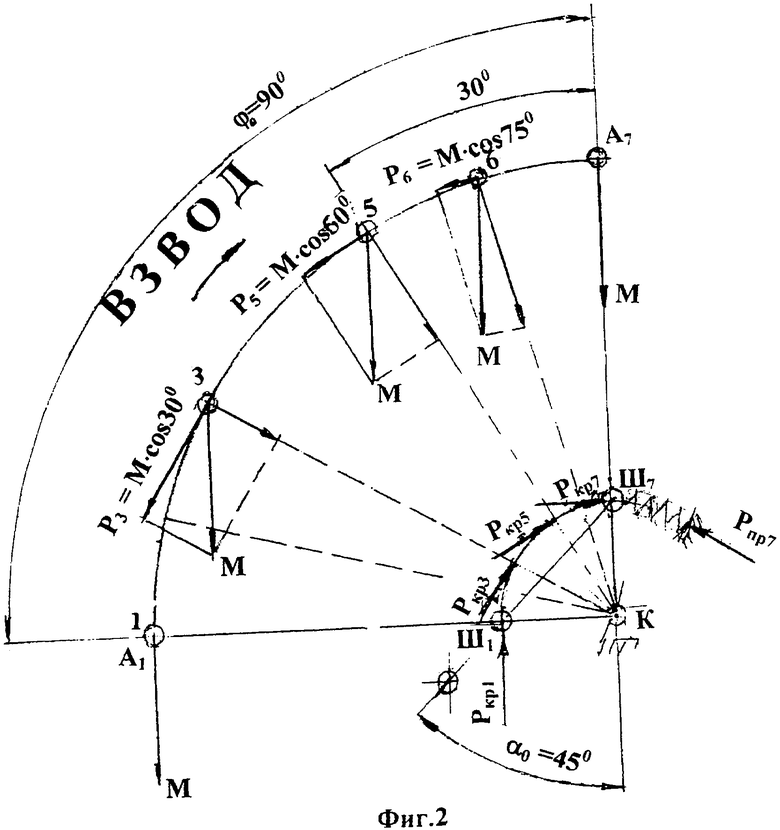
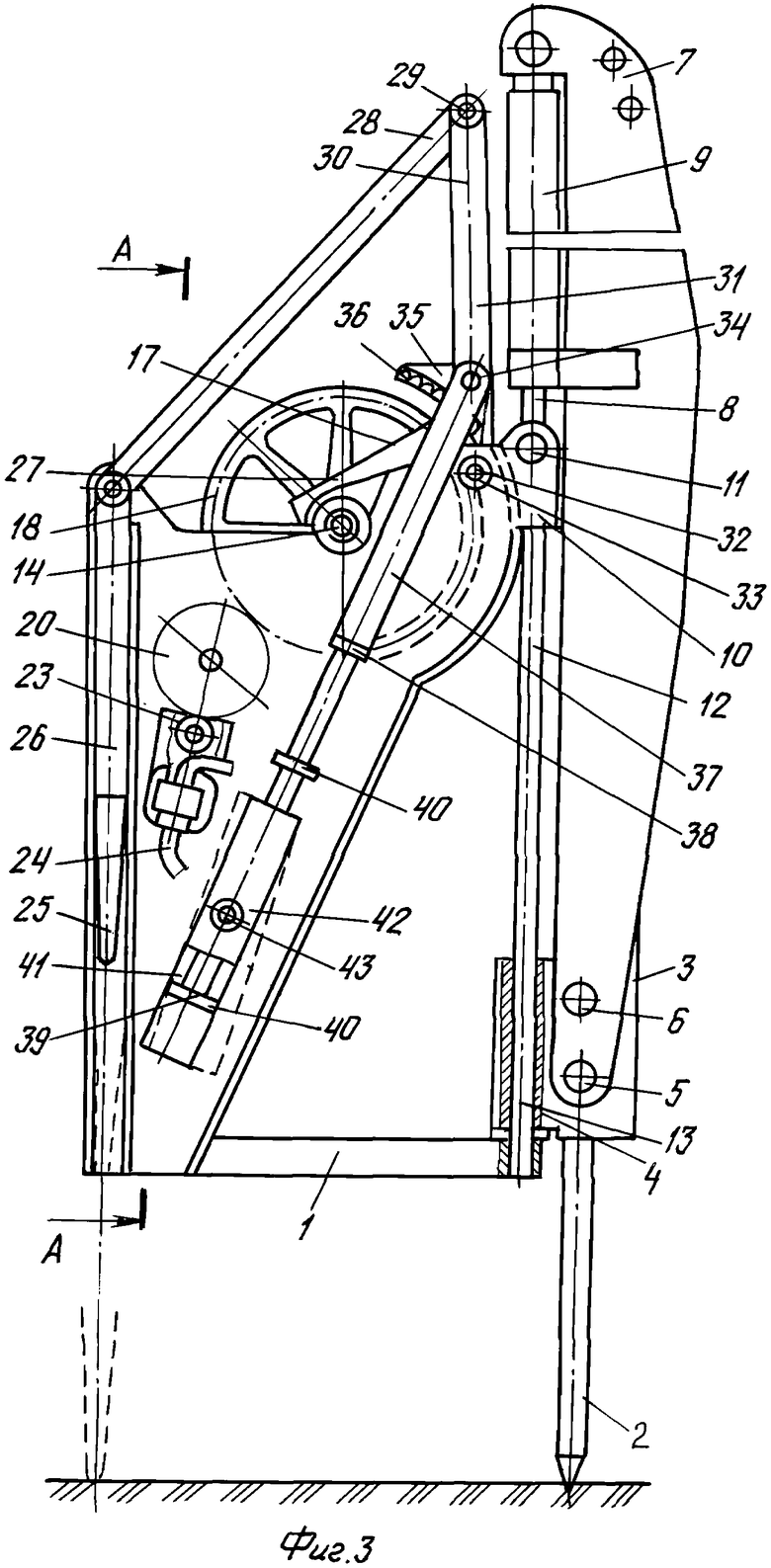
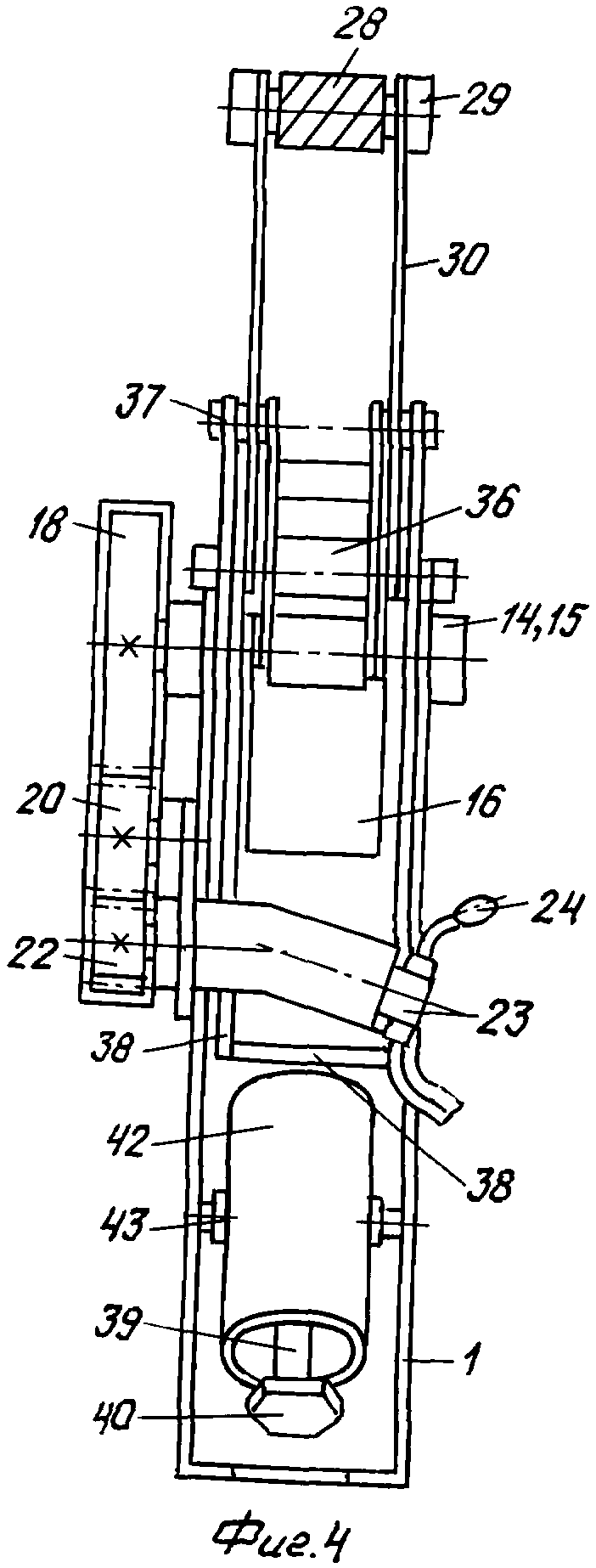
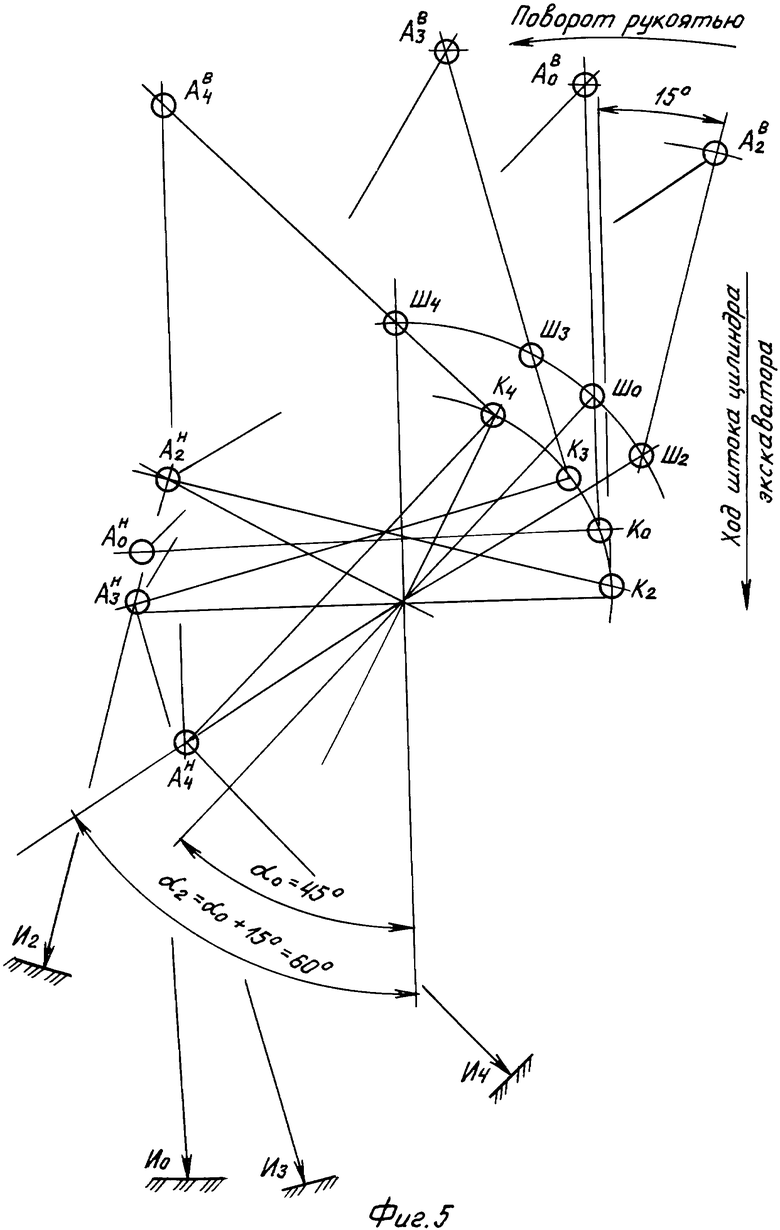
Предлагаемый нами механизм поясняется следующими чертежами. На фиг. 1 представлена кинематическая схема привода коромысла в момент перехода от взвода к разгону и "выбег" кривошипа до начала взвода коромысла для последующего удара. Схема дана для угла ориентации кривошипа относительно коромысла α0=45°, угла начального отклонения коромысла к вертикали β0=0° и угла раскрытия коромысла ϕ0=90°. На фиг. 2 представлена схема сил при взводе ведущего звена снаряда - коромысла - для угла ориентации кривошипа относительно его α0=45°, β0=0°, ϕ0=90°. На фиг.3 представлена фронтальная проекция общего вида механизма в продольном разрезе, на фиг. 4 - разрез профильной проекции механизма со снятым шатуном (по А-А на фиг.3), на фиг. 5 - схема положений коромысла при разработке горной породы с помощью рукояти, установленной по схеме "обратной лопаты".
Ударный механизм состоит из корпуса 1, установленного подвижно относительно опорного шипа 2 при помощи лафета 3, изготовленного в виде стальной поковки со сквозным отверстием, в котором установлены втулки 4, и резьбовым отверстием снизу для опорного шипа 2, жестко связанного пальцами 5, 6 с рукоятью 7 экскаватора и подвижно с корпусом 1, подвешенным на штоке 8 гидроцилиндра 9 экскаватора с помощью проушины 10, соединенной пальцем 11 со штоком и, при помощи резьбы, с направляющей 12, нижний конец которой зафиксирован в корпусе 1 штифтом 13. Установленный в корпусе 1 вал 14, на подшипниковых опорах 15, центральной частью неподвижно соединен с кривошипом 16, имеющим косой срез 17 с левой стороны большего плеча оси его симметрии, а на консольной цапфе закреплено зубчатое колесо 18, находящееся в зацеплении с зубчатыми колесами 19 и 20, причем колесо 19 установлено на опоре 21, жестко связанной с корпусом 1, а второе зубчатое колесо 22 установлено на валу приводного гидродвигателя 23, корпус которого неподвижно с помощью болтов установлен в корпусе 1 и через высоконапорные рукава 24 связан с гидросистемой экскаватора. Кривошип 16 кинематически связан со снарядом, состоящим из: инструмента 25, жестко соединенного с ползуном 26, который через палец 27 шарнирно связан с шатуном 28, который верхним концом также шарнирно, через палец 29, соединен с коромыслом 30. Нижняя часть коромысла выполнена в виде вилки, состоящей из двух параллельных щек 31, которые в нижней части через две оси 32 шарнирно соединены с втулками 33, приваренными к боковым сторонам корпуса 1. А в середине вилки установлена ось 34, на которой внутри шарнирно установлена обойма 35, внутренняя поверхность которой снабжена роликами или фторопластовой накладкой 36, жестко с ней соединенной. А с наружной стороны коромысла шарнирно установлены две щеки 37 вилки 38, жестко соединенной со штоком 39, имеющим два упора 40, которыми они сжимают пружину 41, установленную в цилиндрическом корпусе 42. Внутренняя поверхность корпуса по концам снабжена упорами для пружины 41, а на его наружной поверхности жестко приварены две цапфы 43, с помощью которых он шарнирно соединен с корпусом 1.
Работает предложенное устройство следующим образом. Экскаватор подъезжает к месту работы, и машинист с помощью гидроцилиндров стрелы и рукояти устанавливает рукоять 7 нормально к обрабатываемой поверхности горной породы, упирает в нее опорный шип 2 и фиксирует рукоять 7 ее гидроцилиндрами. Опускает коромысло 30 в нижнее положение, инструмент 25 снаряда при этом выходит из корпуса 1 на полную величину заглубления. Выдвигая шток 8 гидроцилиндра 9, на котором подвешен корпус 1 механизма, он уменьшает вылет инструмента снаряда на величину X1. Для ориентировки на снаряде нанесена кольцевая красная метка шириной 50 мм, на высоте X1. Затем машинист включает приводной кривошип 16, который взводит снаряд, поднимая коромысло 30 в верхнее положение. В этом положении происходит автоматическое отсоединение кривошипа 16 от снаряда, благодаря тому, что обойма 35 коромысла 30 мгновенно прерывает силовой контакт с кривошипом 16, оставаясь с ним в кинематическом контакте в течение всего периода "выбега" кривошипа 16. Коромысло 30 в этот момент движется под действием сил пружины 41 (и составляющей силы тяжести от массы снаряда) вниз со скоростью разжима пружины 41, умноженной на кратность коромысла 30. При встрече с породой снаряд останавливается и углубляется в нее. А кривошип 16 в этот момент плавно соединяет кинематическую цепь с шарнирной обоймой 35 коромысла 30 до тех пор, пока не исчезнет зазор между ними. После этого происходит снова силовое замыкание механизма и подъем коромысла 30 для следующего удара. Машинист должен следить, чтобы красная линия на снаряде не выходила ниже нижнего фланца корпуса устройства. Для этого он должен подавать шток 8 гидроцилиндра 9 вниз на величину, равную заглублению снаряда при каждом ударе. После разрушения объекта или полного заглубления снаряда на величину "X1" машинист должен переставить рукоять 7 экскаватора на новую точку разрушения и процесс обработки горной породы повторяется.
ЛИТЕРАТУРА
1. Мельников А.В., "Способ взвода, разгона и нанесения удара снарядом и устройство для его осуществления при разрушении различных материалов", патент на изобретение RU №2291298 по заявке №2005101174/03, приоритет изобретения 19 января 2005 г.
2. Мельников А.В., "Молот МАА для разрушения негабаритов горных пород", патент на изобретение RU №2237808 от 10.10.04 г.
3. Мельников А.В., Мельников П.А., Мельников А.А., "Ударник для разрушения", авторское свидетельство СССР №1704370, Кл. В25D 9/02, 1986 г.
4. Большая Советская Энциклопедия, т.23, стр.391, второе издание, Москва, Государственное научное издательство "Большая Советская Энциклопедия", 1953 г.
5. Мельников А.В. "Ударный механизм", авторское свидетельство СССР №2041791 С1, 6 В25D 11/12, бюллетень №23 от 20.08.95 г., прототип.
Изобретение относится к машинам ударного действия для разрушения горных пород и искусственных покрытий. Техническим результатом является повышение энергии и мощности механизма. Для этого механизм содержит корпус, размещенный в корпусе приводной вал с закрепленным на нем кривошипом, кинематически связанным со снарядом, состоящим из инструмента, ползуна, шатуна, коромысла, обоймы, гидроцилиндра со штоком и пружиной, установленной в цилиндрическом корпусе, имеющем упоры для пружины, на цилиндрическом корпусе приварены две цапфы, с помощью которых он шарнирно соединен с корпусом, при этом верхний конец коромысла шарнирно соединен с шатуном, связанным шарнирно с ползуном. Механизм содержит опорный шип, причем корпус выполнен подвижным относительно опорного шипа при помощи лафета, изготовленного в виде стальной поковки с проушинами и резьбовым отверстием, в котором установлена направляющая с опорным шипом, жестко связанным пальцами с рукоятью экскаватора и подвижно - с корпусом, подвешенным на проушине гидроцилиндра экскаватора, при этом нижняя часть коромысла выполнена в виде вилки, состоящей из двух параллельных щек, которые в нижней части через две оси шарнирно соединены с втулками, приваренными к боковым сторонам корпуса, а в середине вилки установлена ось, на которой шарнирно установлена обойма, с наружной стороны коромысла шарнирно установлены две щеки вилки, жестко соединенной со штоком, имеющим два упора, которыми они сжимают пружину, при этом кривошип выполнен с выемкой в виде косого среза под углом 15° к линии ориентации кривошипа относительно коромысла, находящегося в основном положении в крайней верхней точке, а геометрические размеры кривошипа и коромысла определены через эксцентриситет кривошипа (е). 1 з.п. ф-лы, 5 ил.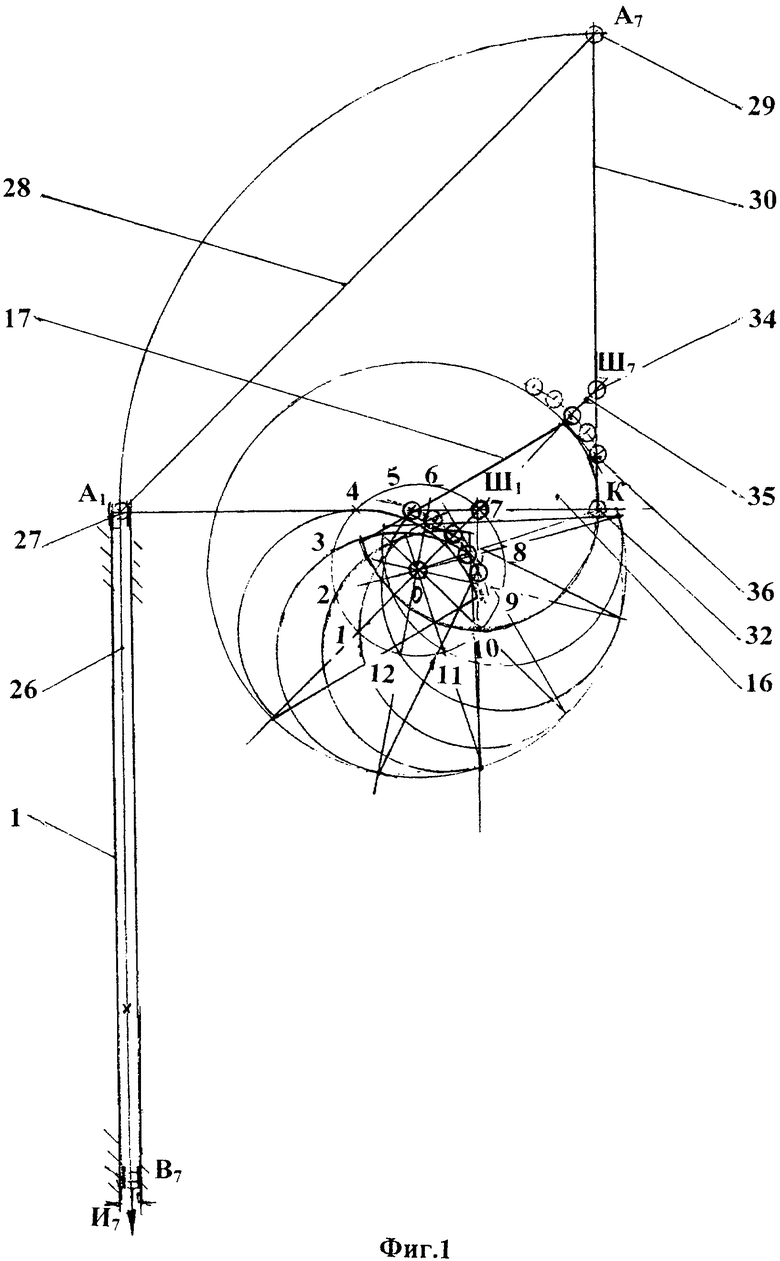
опорное плечо коромысла l1=1,414·е,
длина коромысла lК=l1·u=1,414·e·u,
где u-заданная кратность коромысла, u=lK/l1
радиус кривошипа RK=1,414·е,
диаметр кривошипа Д=2·RK=2,828·е,
радиус внешней траектории, описываемой кривошипом, RTP=RK·e=2,414·e и ее диаметр ДТР=4,828·е,
толщина обоймы t=0,414·e,
длина дуги обоймы - не менее 2·е,
длина шатуна 
расстояние от центра кривошипа до оси обоймы коромысла, находящегося в нижнем положении ОШH=е, и находящегося в верхнем положении ОШв=е+2·е+0,414·е=3,414·е,
а расстояние от центра привода «О» до центра качания коромысла «К» равно ОК=2,236·е.
| УДАРНЫЙ МЕХАНИЗМ | 1990 |
|
RU2041791C1 |
| Устройство ударного действия для дробления негабаритов | 1980 |
|
SU927995A1 |
| Гидравлическое устройство ударного действия | 1978 |
|
SU773256A1 |
| RU 2059045 C1, 27.04.1996 | |||
| МОЛОТ ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 1993 |
|
RU2087712C1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| Гаситель пляски расщепленных проводов, его демпфер крутильных колебаний, воздушная линия электропередачи с таким гасителем и воздушная линия электропередачи с гасителем пляски, снабженным таким демпфером | 2019 |
|
RU2716701C1 |
| СЕРГЕЕВ В.П | |||
| Строительные машины и оборудование | |||
| - М.: Высшая школа, 1987, с.242. | |||

