Область техники
Настоящее изобретение относится, в основном, к устройствам беспроводной связи. В частности, настоящее изобретение относится к алгоритмам управления мощностью для применения в среде мобильной связи.
Предшествующий уровень техники
Устройства мобильной связи, такие как беспроводные телефоны, часто используются на транспортных средствах или других подвижных платформах, которые перемещаются с относительно высокими скоростями. Например, устройства мобильной связи часто используются в автомобилях, поездах и самолетах, которые перемещаются со скоростями до нескольких сотен километров в час.
В среде беспроводной связи сигналы часто передаются между передатчиком и приемником по каналу с замираниями. Если передатчик и приемник имеют относительную скорость друг относительно друга, то сигналы, принимаемые по таким каналам с замираниями, испытывают флуктуации по амплитуде и фазе. Эти флуктуации имеют максимальную частоту, которая пропорциональна этой относительной скорости.
Многие системы беспроводной связи используют алгоритмы управления мощностью, способствующие эффективному использованию радиочастотной (РЧ) энергии. В среде мобильной связи алгоритмы управления мощностью включают в себя передачу команд управления мощностью от устройств связи к базовым станциям. Если конкретное устройство посылает команду управления мощностью, то оно предписывает базовой станции отрегулировать мощность ее передач, предназначенных для данного конкретного устройства. Таким образом, базовые станции обычно принимают команды, предписывающие повышение мощности, или команды, предписывающие понижение мощности.
Обычные системы беспроводной связи используют алгоритмы, в которых команды управления мощностью передаются с фиксированной частотой. К сожалению, для этих систем с фиксированной частотой команд, поскольку частота флуктуаций амплитуды и фазы изменяется, то также изменяется эффективность этих команд.
Поэтому обычные системы, в которых используется передача команд управления мощностью с фиксированной частотой, не могут оптимальным образом управлять уровнями мощности во всех диапазонах скоростей. Таким образом, в таких системах с фиксированной частотой устройства связи принимают сигналы, имеющие более высокие уровни мощности, чем те, которые необходимы для выполнения заданных требований к качеству обслуживания. Поэтому базовые станции, принимающие команды управления мощностью с фиксированной частотой, передают сигналы, имеющие избыточную мощность, которая, иначе, могла бы быть использована для поддержки дополнительных устройств связи. Следовательно, ресурсы системы расходуются бесполезно.
Следовательно, требуется способ и система для динамической регулировки операций управления мощностью с учетом скорости устройства.
Сущность изобретения
Настоящее изобретение относится к способу и системе для обеспечения чувствительного к скорости управления мощностью в устройстве беспроводной связи (УБС), которое принимает сигналы от базовой станции. Способ и система оценивают скорость устройства; определяют частоту команд управления мощностью в соответствии с оцененной скоростью и передают сигналы управления мощностью на базовую станцию согласно частоте команд управления мощностью.
Частота команд управления мощностью определяется посредством отображения оцененной скорости на диапазон скоростей и выбора частоты, которая соответствует диапазону скоростей, в качестве частоты команд управления мощностью.
Скорость устройства оценивается посредством измерения частоты пересечения уровня многолучевого сигнала. Альтернативно, данная скорость может оцениваться посредством периодического контроля местоположения устройства при помощи услуг, например, глобальной системы определения местоположения (GPS).
Настоящее изобретение способствует эффективному использованию доступной мощности передачи и максимизирует количество устройств связи, которые может поддерживать базовая станция.
Краткое описание чертежей
Настоящее изобретение описывается с ссылкой на прилагаемые чертежи. На чертежах аналогичные ссылочные позиции обозначают идентичные, функционально подобные и/или конструктивно подобные элементы. Чертеж, на котором элемент появляется в первый раз, указывается в ссылочной позиции крайней левой цифрой (цифрами).
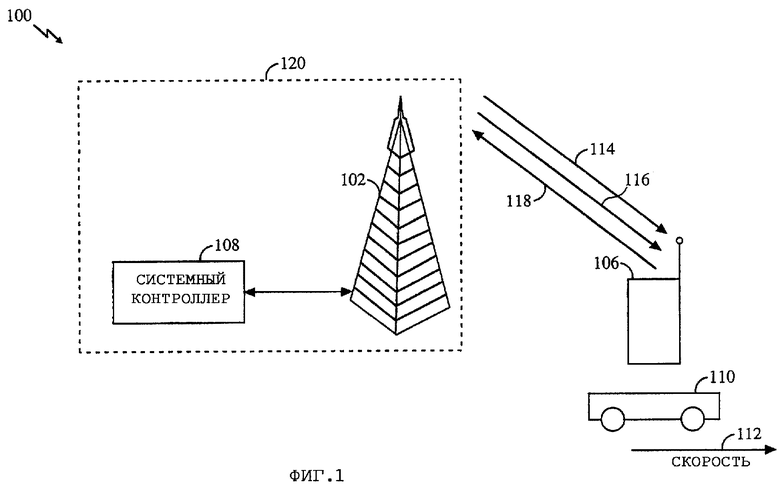
Фиг.1 - блок-схема примерной среды мобильной связи;
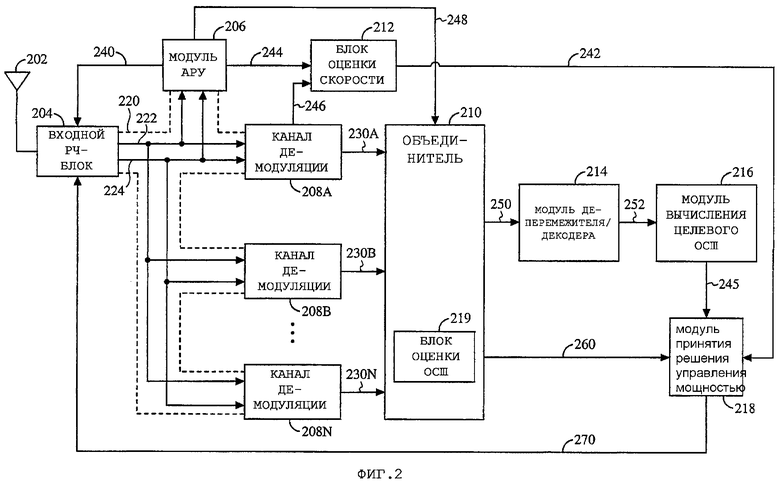
фиг.2 - иллюстрация приемной части устройства беспроводной связи;
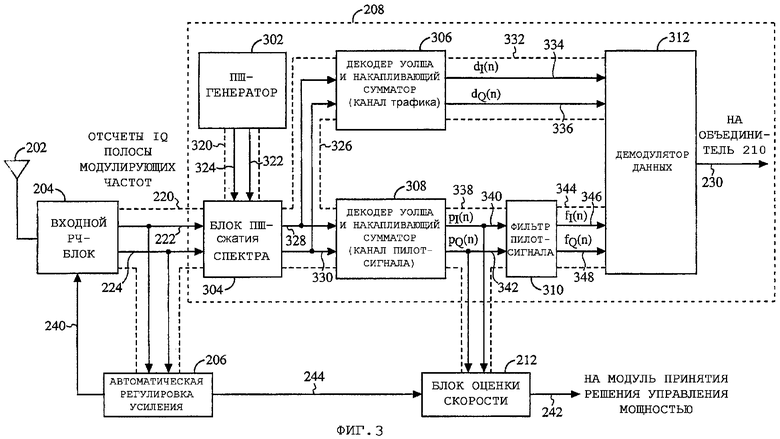
фиг.3 - блок-схема, иллюстрирующая реализацию канала (отвода) демодуляции многоотводного приемника;
фиг.4 и 5 - диаграммы, иллюстрирующие рабочие параметры для двух реализаций чувствительного к скорости управления мощностью;
фиг.6 - таблица, иллюстрирующая набор приведенных для примера шаблонов команд, где каждый шаблон создает эффективную частоту управления мощностью;
фиг.7 - блок-схема последовательности операций, иллюстрирующая рабочую последовательность, включающую в себя чувствительное к скорости управление мощностью;
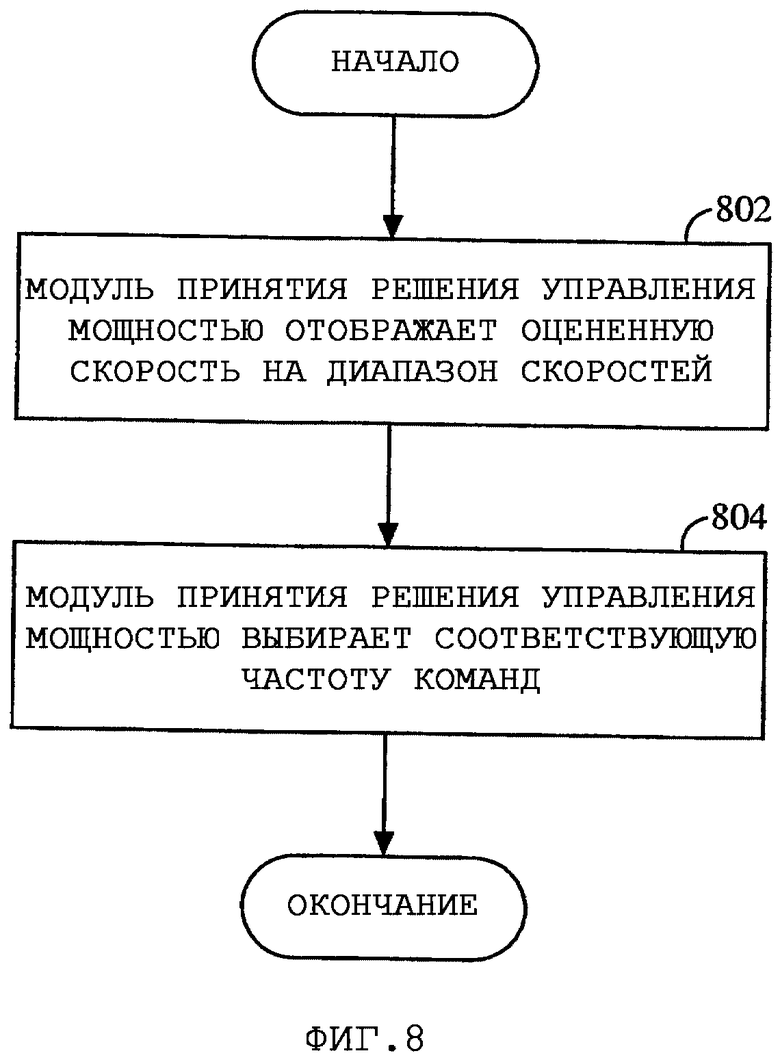
фиг.8 - блок-схема, поясняющая один из этапов последовательности операций по фиг. 7;
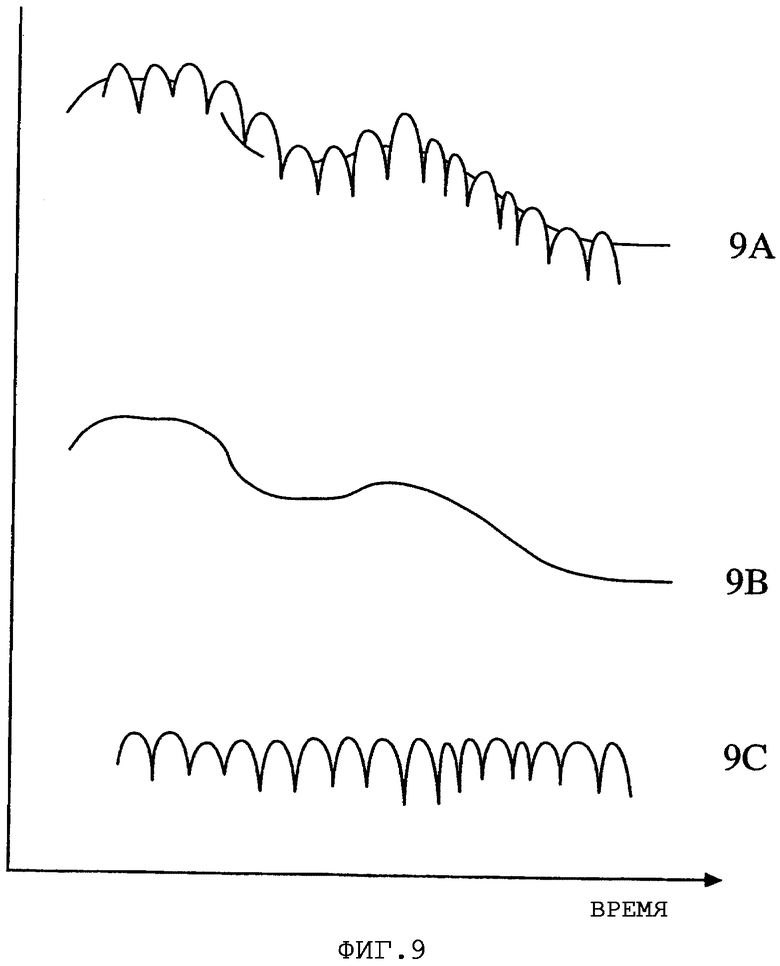
фиг.9А-9С - графики, иллюстрирующие характеристики замирания при многолучевом распространении;
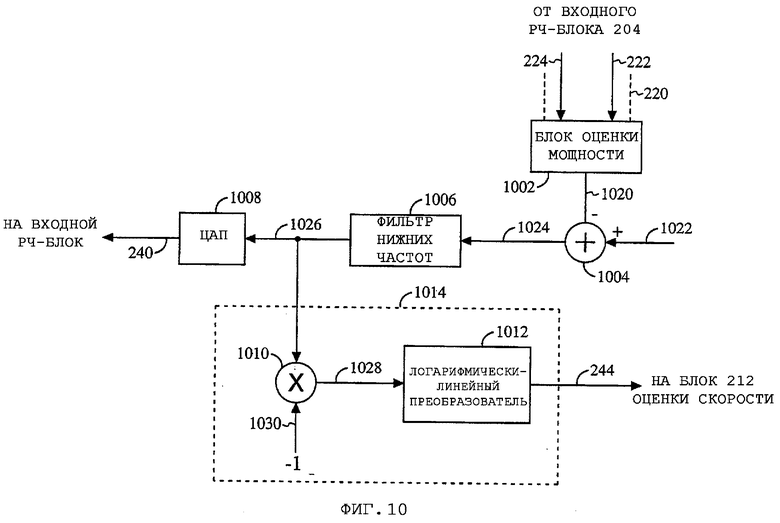
фиг.10 - блок-схема, иллюстрирующая реализацию модуля автоматической регулировки усиления;
фиг.11 - график, изображающий оценку сигнала в зашумленной среде; и
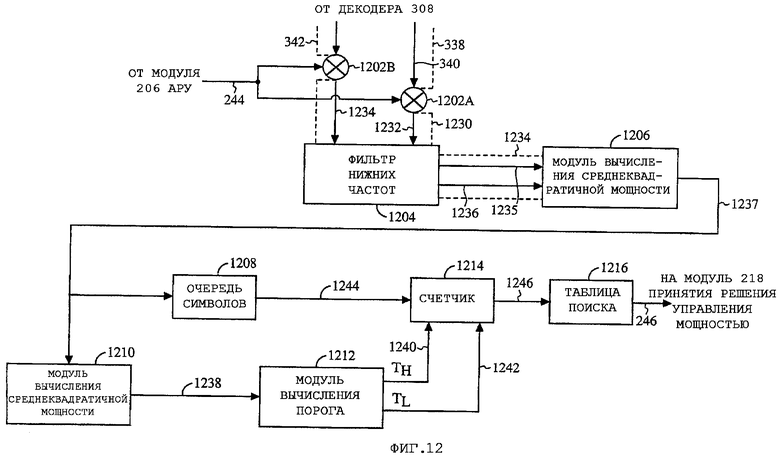
фиг.12 и 13 - блок-схемы, показывающие реализации блока оценки скорости.
Подробное описание изобретения
I. Среда связи
Перед подробным описанием изобретения полезно описать примерную среду, в которой может быть реализовано изобретение. Настоящее изобретение особенно полезно в среде мобильной связи. На фиг.1 изображена такая среда.
На фиг.1 представлена блок-схема примерной среды 100 мобильной связи. Среда 100 связи включает в себя базовую станцию 102, системный контроллер 108, устройство 106 беспроводной связи (УБС) и подвижную платформу 110.
Базовая станция 102 соединена с системным контроллером 108. Базовая станция 102 и системный контроллер 108 вместе представляют собой часть системы 120 беспроводной связи (СБС), которая обменивается информацией с УБС 106. Этот обмен информацией обеспечивает службы, такие как сотовая телефонная связь и приложение системы персональной связи (СПС).
Данный обмен информацией между СБС 120 и УБС 106 происходит по различным каналам связи. Из этих различных каналов связи на фиг.1 показаны канал 114 пилот-сигнала и канал 116 трафика. Данные каналы позволяют производить передачу информации от базовой станции 102 на УБС 106.
Канал 116 трафика пересылает сигналы трафика, передающие информацию, такую как закодированные цифровым образом речь и данные. Канал 114 пилот-сигнала пересылает пилот-сигналы на УБС 106 от базовой станции 102. Пилот-сигналы позволяют УБС 106 определять временные характеристики сигналов трафика, передаваемых по каналу 116 трафика. Данное определение временных характеристик позволяет УБС 106 принимать и обрабатывать информацию, содержащуюся в сигналах трафика.
Сигналы трафика и пилот-сигналы представляют собой сигналы множественного доступа с кодовым разделением каналов (МДКР). Сигналы МДКР генерируются из последовательностей символов при помощи процессов каналообразования и расширения спектра. Расширение спектра включает в себя умножение последовательности символов на расширяющую спектр последовательность, такую как псевдошумовая (ПШ) последовательность. Каналообразование включает в себя использование ортогональных каналообразующих кодов, таких как коды Уолша. Такие коды позволяют многочисленным передачам одновременно и совместно использовать части радиочастотного (РЧ) спектра без взаимных помех.
Примерный процесс генерирования сигнала МДКР включает в себя каналообразование последовательности символов, такой как поток двоичных битов, при помощи кода Уолша и затем расширение спектра «каналообразованной» последовательности при помощи квадратурной пары ПШ-последовательностей. Эта функция расширения спектра создает синфазную (I) последовательность МДКР и квадратурную (Q) последовательность МДКР. Синфазная и квадратурная последовательности (не показаны) затем модулируются при помощи квадратурной фазовой манипуляции (КФМ) и передаются на УБС 106 в виде РЧ-сигнала.
Как описано выше, пилот-сигналы, передаваемые по каналу 114 пилот-сигнала, обеспечивают опорные моменты времени для сигналов трафика, передаваемых по каналу 116 трафика. Эти опорные моменты времени позволяют УБС 106 синхронизировать свой демодулятор с функциями расширения спектра и каналообразования, выполняемыми базовой станцией 102, так, что символы трафика, передаваемые базовой станцией 102, могут когерентно демодулироваться. Кроме того, эта опорная фаза позволяет УБС 106 когерентно демодулировать сигналы трафика, передаваемые базовой станцией 102.
Сигналы трафика, передаваемые по каналу 116 трафика, переносят информационные последовательности. Базовая станция 102 кодирует и перемежает информационные последовательности в блоки, упоминаемые в данной заявке как кадры, перед выполнением описанных выше операций каналообразования и расширения спектра.
Обратный канал 118 управления мощностью пересылает информацию от УБС 106 на базовую станцию 102. Эта информация включает в себя команды управления мощностью, которые генерируются в соответствии с алгоритмом управления мощностью. Этот алгоритм управления мощностью приводится в действия вычислениями отношения сигнал-шум (ОСШ), выполняемыми УБС 106. Эти вычисления ОСШ измеряют качество сигналов, которые УБС 106 принимает из канала 116 трафика. Каждая команда управления мощностью предписывает базовой станции 102 отрегулировать мощность своих передач по каналу 116 трафика.
УБС 106 представляет собой устройство связи, такое как переносной телефон. Как изображено на фиг.1, УБС 106 прикреплено к подвижной платформе 110. Подвижная платформа 110 совершает движение, которое определяется вектором 112 скорости. Это движение вызывает доплеровский сдвиг частоты в РЧ-сигналах, которые УБС 106 принимает от базовой станции 102. Подвижной платформой 110 может быть автомобиль, поезд, самолет или любая другая платформа, выполненная с возможностью транспортировки УБС 106 со скоростями, которые оказывают влияние на характеристики замираний РЧ-сигналов, принимаемых по каналам 114 и 116.
II. Устройство связи
На фиг.2 представлена иллюстрация приемной части 200 УБС 106. Приемная часть 200 включает в себя антенный сегмент 202, входной РЧ-блок 204, модуль 206 автоматической регулировки усиления (АРУ), множество каналов 208а-208n демодуляции, объединитель 210, блок 212 оценки скорости, модуль 214 деперемежителя/декодера, модуль 216 вычисления целевого отношения сигнал-шум (ОСШ), модуль 218 принятия решения управления мощностью и блок 219 оценки ОСШ, который находится в объединителе 210.
Антенный сегмент 202 принимает радиочастотные (РЧ) передачи от одной или нескольких базовых станций, таких как базовая станция 102. Антенный сегмент 202 направляет эти передачи в виде электрических сигналов на входной РЧ-блок 204.
РЧ-передачи, принимаемые антенным сегментом 202, включают в себя пилот-сигналы и сигналы трафика, передаваемые по каналу 114 пилот-сигнала и каналу 116 трафика, соответственно. Каждый из этих принимаемых сигналов может быть составным сигналом, который включает в себя множество многолучевых составляющих. Многолучевые составляющие представляют собой индивидуальные РЧ-волны, излучаемые одним и тем же РЧ-передатчиком, но которые поступают на приемную антенну по различным путям распространения. Эти различные пути распространения представляют собой результат отражений волн, вызванных физической местностью и сооружением, окружающими УБС 106, а также другими физическими предметами в среде РЧ-передачи. Многолучевые составляющие конкретного РЧ-сигнала, по существу, идентичны за исключением индивидуального временного сдвига, уровня мощности и фазы несущей.
Для среды связи, показанной на фиг.1, каждый пилот-сигнал и сигнал трафика, посылаемые соответственно по каналу 114 пилот-сигнала и каналу 116 трафика, могут иметь множество многолучевых составляющих. Эти многолучевые составляющие группируются в пары сигналов, которые включают в себя многолучевую составляющую пилот-сигнала и многолучевую составляющую сигнала трафика. Эти парные многолучевые составляющие имеют, по существу, идентичные задержки на распространение и характеристики мощности. Как описано ниже, УБС 106 идентифицирует и обрабатывает эти пары сигналов в функциональных компонентах, упоминаемых ниже как каналы (отводы) демодуляции многоотводного приемника. Данные компоненты подробно описаны ниже с ссылкой на фиг.3.
В дополнение к приему РЧ-сигналов от одной или нескольких базовых станций антенный сегмент 202 может принимать электрические сигналы для беспроводной передачи от усилителя мощности передачи (не показан) в УБС 106. Кроме того, для возможности осуществления одновременной передачи и приема РЧ-сигналов через одну антенну в антенном сегменте 202 антенный сегмент 202 также может включать в себя диплексер (не показан).
Входной РЧ-блок 204 принимает электрические сигналы от антенного сегмента 202 в полосе частот РЧ. Примеры полос частот РЧ включают в себя полосу частот для сотовой связи с центральной частотой 800 МГц и полосу частот для систем персональной связи (СПС) с центральной частотой 1,9 ГГц. При приеме входной РЧ-блок 204 преобразует с понижением частоты эти электрические сигналы из полосы частот РЧ в полосу модулирующих частот. Кроме того, входной РЧ-блок 204 может фильтровать электрические сигналы, принимаемые от антенного сегмента 202, в соответствии с предварительно определенной шириной полосы.
Входной РЧ-блок 204 также включает в себя усилительные компоненты (не показаны), которые повышают мощность РЧ-сигналов, таких как пилот-сигналы и сигналы трафика, принимаемых антенным сегментом 202. Приведенные для примера усилительные компоненты включают в себя малошумящий усилитель (МШУ) для первоначального усиления сигналов при приеме антенным сегментом 202 и усилитель с регулируемым коэффициентом усиления (УРКУ) для усиления этих сигналов после того, как они смешиваются с понижением частоты до промежуточной частоты (ПЧ) во время описанного выше процесса преобразования с понижением частоты. Один или несколько из этих усилительных компонентов имеют регулируемый коэффициент усиления, который управляется модулем 206 АРУ.
После преобразования с понижением частоты до полосы модулирующих частот входной РЧ-блок 204 пропускает аналоговый сигнал полосы модулирующих частот через аналого-цифровой преобразователь для преобразования аналогового сигнала полосы модулирующих частот в набор 220 цифровых сигналов полосы модулирующих частот. Набор 220 сигналов полосы модулирующих частот включает в себя синфазную (I) составляющую 222 сигнала и квадратурную (Q) составляющую 224 сигнала. Модуль 206 АРУ регулирует коэффициент усиления усилительных компонентов во входном РЧ-блоке 204. Эти регулировки поддерживают набор 220 сигналов, по существу, на постоянном уровне мощности. Модуль 206 АРУ выполняет эти регулировки в ответ на обратную связь, принимаемую от набора 220 сигналов. Данная обратная связь используется для измерения энергии набора 220 сигналов.
Данные регулировки, выполняемые модулем 206 АРУ, включают в себя посылку сигнала 240 управления усилением на входной РЧ-блок 204. Сигнал 240 управления усилением может включать в себя множество составляющих сигналов, где каждый из этих составляющих сигналов соответствует конкретному усилительному компоненту во входном РЧ-блоке 204. Данные сигналы управления могут быть аналоговыми или цифровыми и сообщают регулировку усиления соответствующему усилительному компоненту.
Модуль 206 АРУ также определяет внутриполосную энергию для сигналов, которые он принимает от входного РЧ-блока 204, и посылает это определенное значение на блок 219 оценки ОСШ в виде сигнала 248 Io.
Блок 212 оценки скорости принимает оценку 244 напряжения от модуля 206 АРУ и набор 246 последовательностей пилот-сигнала полосы модулирующих частот от одного из каналов 208 демодуляции. Оценка 244 напряжения обрабатывается блоком 212 оценки скорости для получения сигнала 242 оценки скорости, который посылается на модуль 218 принятия решения управления мощностью. Сигнал 242 оценки скорости указывает величину вектора 112 скорости. Модуль 218 принятия решения управления мощностью использует данную информацию о скорости для управления частотой, с которой команды управления мощностью посылаются на базовую станцию 102 по обратному каналу 118 управления мощностью. Различные реализации блока 212 оценки скорости описываются ниже с ссылкой на фиг.12 и 13.
Что касается набора 220 сигналов полосы модулирующих частот, то аналогично поступающим РЧ-сигналам, принимаемым антенным сегментом 202, набор 220 сигналов полосы модулирующих частот включает в себя множество составляющих сигналов. Эти составляющие сигналы могут включать в себя множество многолучевых составляющих передачи, относящихся к одному или нескольким каналам 114 пилот-сигнала и каналам 116 трафика.
Входной РЧ-блок 204 пропускает набор 220 сигналов полосы модулирующих частот в каждый канал 208а-n демодуляции. В свою очередь, каждый канал 208 демодуляции идентифицирует и отслеживает отдельную пару сигналов из набора 220 сигналов полосы модулирующих частот. Как описано выше, каждая из этих пар сигналов включает в себя составляющую пилот-сигнала и выровненную во времени составляющую сигнала трафика. Таким образом, каждый канал 208а-n демодуляции может индивидуально отслеживать и принимать составляющую пилот-сигнала и составляющую сигнала трафика, совместно используя одинаковую задержку при многолучевом распространении.
Каналы 208 демодуляции отслеживают многолучевые составляющие посредством интегрирования принимаемых пилот-сигналов в течение периода времени, чтобы отделить мощность в одной многолучевой составляющей от общей принимаемой мощности. Данный период времени основывается на характеристиках РЧ-замирания.
Каждый канал 208 демодуляции обрабатывает свою соответствующую пару сигналов и выводит соответствующую последовательность 230 символов. Эти последовательности символов посылаются на объединитель 210. Последовательности 230 символов совпадают с соответствующими последовательностями символов, которые были расширены по спектру, закодированы, промодулированы и переданы по каналу 116 трафика базовой станцией 102.
Последовательности 230 символов, полученные на выходе каждого канала 208, суммируются объединителем 210 для получения единой последовательности 250 символов. Перед суммированием каждая индивидуальная последовательность 230 может быть взвешена и/или обработана так, чтобы оптимизировать качество объединенной последовательности 250 символов, что должно быть очевидно для специалиста в соответствующей области техники. Объединитель 210 посылает объединенную последовательность 250 символов на модуль 214 деперемежителя/декодера.
Объединитель 210 включает в себя блок 219 оценки ОСШ. Блок 219 оценки ОСШ оценивает ОСШ сигналов трафика, принимаемых по каналу 116 трафика. Данная оценка посылается на модуль 218 принятия решения управления мощностью в виде индикатора 260 ОСШ трафика. При генерировании индикатора 260 ОСШ трафика блок 219 оценки ОСШ может использовать различные методы оценки ОСШ. Примерные методы оценки ОСШ подробно описываются ниже.
Модуль 214 деперемежителя/декодера принимает последовательность 250 символов от объединителя 210. Как описано выше, базовая станция 102 кодирует и перемежает информационные последовательности перед их передачей по каналу 116 трафика в виде сигналов трафика. Модуль 214 деперемежителя/декодера изменяет на противоположные эти процессы перемежения и кодирования. Сначала модуль 214 устраняет перемежение в последовательности 250 символов, таким образом генерируя последовательность символов, которые организуются в блоки, упоминаемые как кадры.
Модуль 214 затем декодирует кадр символов в биты и вычисляет циклический избыточный код для определения, не был ли какой-либо из битов в кадре принят неправильно. Если в кадре существуют такие ошибки, то модуль деперемежителя/декодера классифицирует кадр как разрушение информации (т. е. дефектный кадр).
Модуль 216 вычисления целевого ОСШ генерирует индикатор 254 целевого ОСШ, который направлен на поддержание частоты появления дефектных кадров (разрушений информации), принимаемых по каналу 116 трафика, ниже заданного предела. Модуль 216 вычисления целевого ОСШ измеряет данную частоту появления дефектных кадров в качестве вероятности ошибки на кадр (ВОК). Для данного временного интервала ВОК вычисляется как количество принятых дефектных кадров, деленное на общее количество принятых кадров.
Количество принятых дефектных кадров определяется при помощи подсчета количества разрушений информации в кадре, классифицируемых модулем 214. Это количество, а также количество принятых кадров, посылается в модуль 216 вычисления целевого ОСШ в виде сигнала 252 статистики кадра.
Модуль 216 вычисления целевого ОСШ регулирует индикатор 254 целевого ОСШ, в то время как изменяется ВОК. Эта регулировка включает в себя увеличение индикатора 254 целевого ОСШ, когда ВОК увеличивается, и уменьшение индикатора 254 целевого ОСШ, когда ВОК уменьшается.
Модуль 218 принятия решения управления мощностью принимает индикатор 254 целевого ОСШ от модуля 216 вычисления целевого ОСШ и индикатор 260 ОСШ трафика от блока 219 оценки ОСШ. В результате сравнения значений индикаторов 254 и 260 модуль 218 принятия решения управления мощностью генерирует команды управления мощностью, которые посылаются по обратному каналу 218 управления мощностью в потоке 270 команд.
Данное генерирование команд управления мощностью включает в себя генерирование команды на повышение мощности, когда индикатор 260 меньше индикатора 254, и генерирование команды на понижение мощности, когда индикатор 260 больше индикатора 254.
На фиг.3 представлена блок-схема, иллюстрирующая реализацию канала (отвода) 208 приема (многоотводного приемника). Данная реализация предоставляет информацию на блок 212 оценки скорости. Как показано на фиг.3, канал 208 приема включает в себя генератор 302 ПШ-последовательности, блок 304 ПШ-сжатия спектра, декодер 306 канала трафика, декодер 308 канала пилот-сигнала, фильтр 310 нижних частот пилот-сигнала и демодулятор 312 данных.
Генератор 302 ПШ-последовательности генерирует набор 320 ПШ-последовательностей, который посылается в блок 304 ПШ-сжатия спектра. Набор 320 ПШ-последовательностей включает в себя синфазную (I) ПШ-последовательность 322, которая выравнивается с составляющей 222 сигнала I, и квадратурную (Q) ПШ-последовательность 324, которая выравнивается с составляющей 224 сигнала Q.
Блок 304 ПШ-сжатия спектра принимает набор 220 сигналов полосы модулирующих частот и обрабатывает его при помощи набора 320 ПШ-последовательностей для получения набора 326 сигналов со сжатым спектром. Набор 326 сигналов со сжатым спектром включает в себя синфазный (I) сигнал 328 со сжатым спектром и квадратурный (Q) сигнал 330 со сжатым спектром. Блок 304 ПШ-сжатия спектра посылает набор 326 сигналов со сжатым спектром на декодеры 306 и 308.
Декодер 306 сопоставляет набор 326 сигналов со сжатым спектром с одним или несколькими каналообразующими кодами для получения значений демаскированной последовательности данных, которые накапливаются из набора 332 последовательностей трафика полосы модулирующих частот. Данный процесс декодирования известен как демаскирование. Демаскирование сигнала трафика включает в себя использование ортогонального каналообразующего кода, такого как код Уолша, используемого базовой станцией 102 для кодирования сигнала трафика. Декодер 306 определяет соответствующий каналообразующий код при помощи процесса накопления. Накопление включает в себя сопоставление набора 326 сигналов со сжатым спектром с одним или несколькими каналообразующими кодами. Декодер 306 формирует набор 332 последовательностей трафика полосы модулирующих частот. Набор 332 последовательностей трафика включает в себя синфазную последовательность 334 трафика и квадратурную последовательность 336 трафика.
Декодер 308 декодирует пилот-сигнал, содержащийся в наборе 326 сигналов со сжатым спектром при помощи описанных выше методов демаскирования и накопления применительно к декодеру 306. В результате этого декодирования создается набор 338 последовательностей пилот-сигнала полосы модулирующих частот. Набор 338 последовательностей пилот-сигнала включает в себя синфазную последовательность 340 пилот-сигнала и квадратурную последовательность 342 пилот-сигнала.
Декодеры 306 и 308 выполняют операции декодирования, которые включают в себя использование ортогональных каналообразующих кодов, таких как коды Уолша. Каналообразующие коды, используемые декодерами 306 и 308, соответствуют каналообразующим кодам, используемым функциональными средствами кодирования в базовой станции 102.
Пилот-сигналы используются в качестве опорной фазы для демодуляции сигналов трафика. На способность УБС 106 демодулировать сигналы трафика непосредственно оказывает влияние ОСШ принимаемых пилот-сигналов. Фильтр 310 пилот-сигнала отфильтровывает набор 338 последовательностей полосы модулирующих частот для устранения шума из набора 338 последовательностей пилот-сигнала, тем самым повышая его ОСШ.
Данный процесс фильтрации создает набор 344 отфильтрованных последовательностей пилот-сигнала, который посылается на демодулятор 312 данных. Набор 344 отфильтрованных последовательностей пилот-сигнала включает в себя синфазную (I) отфильтрованную последовательность 346 пилот-сигнала и квадратурную (Q) отфильтрованную последовательность 348 пилот-сигнала.
Демодулятор 312 данных принимает наборы 332 и 344 последовательностей. Демодулятор 312 данных извлекает опорную фазу из набора 344 отфильтрованных последовательностей пилот-сигнала. Опорная фаза позволяет демодулятору 312 данных когерентно демодулировать набор 332 последовательностей трафика полосы модулирующих частот для получения последовательности 230 символов. Выходной сигнал 230 посылается на объединитель 210.
III. Чувствительное к скорости управление мощностью
Алгоритм управления мощностью УБС 106 динамически регулируется как функция скорости устройства. Благодаря функции динамической регулировки УБС 106 препятствует использованию базовой станцией 102 избыточной мощности для передачи сигналов трафика по каналу 116 трафика. Эта функция способствует эффективному использованию доступной мощности передачи и максимизирует количество устройств связи, которые может поддерживать базовая станция 102.
Алгоритм управления мощностью УБС 106 динамически регулируется под действием оценок скорости, предоставляемых блоком 212 оценки скорости. Данные регулировки включают в себя изменение частоты, с которой команды управления мощностью передаются на базовую станцию 102.
Если УБС 106 движется, то канал 116 трафика характеризуется как канал с замираниями. Сигналы, принимаемые по каналу с замираниями, испытывают флуктуации по амплитуде и фазе. Такие флуктуации имеют частоту, которая пропорциональна скорости УБС 106.
Для обычных систем, в которых используются команды управления мощностью с фиксированной частотой, когда изменяется частота флуктуаций амплитуды и фазы, то также изменяется эффективность этих команд. Например, в устройствах беспроводной связи, в которых используется фиксированная частота команд, существует порог VU скорости. Если скорость УБС 106 превышает VU, то фиксированная частота команд вызывает передачу базовой станцией 102 с избыточной мощностью. Таким образом, базовая станция 102 использует более высокий уровень средней мощности, чем необходимо, для поддержания ее требуемого качества обслуживания (например, 1 процент ВОК). Как описано выше, передача сигналов, имеющих избыточную мощность, бесполезно расходует общие ресурсы системы.
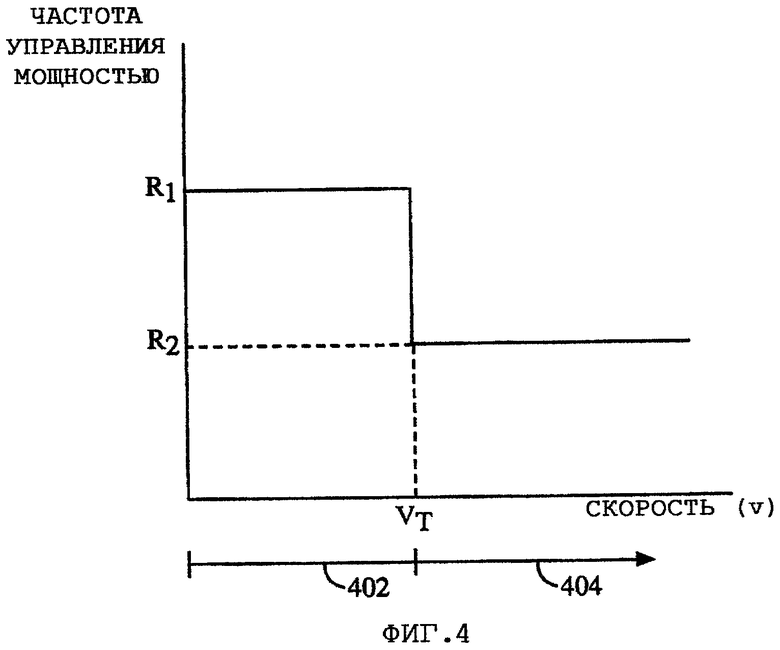
На фиг.4 и 5 представлены диаграммы, иллюстрирующие рабочие параметры для двух реализаций чувствительного к скорости управления мощностью настоящего изобретения. Данными рабочими параметрами являются диапазоны скоростей и соответствующие частоты управления мощностью. УБС 106 может работать в соответствии с данными параметрами, чтобы обеспечивать эффективное использование мощности по каналу 116 трафика.
На фиг.4 изображены два диапазона 402 и 404 скоростей, которые разделены пороговой скоростью VT. Диапазон 404 скоростей включает в себя скорости, которые больше скоростей, включенных в диапазон 402. Когда УБС 106 имеет скорость, которая находится в диапазоне 402 скоростей, то оно передает команды управления мощностью на базовую станцию 102 с частотой R1. Однако, когда УБС 106 имеет скорость, которая находится в диапазоне 404 скоростей, то она передает команды управления мощностью на базовую станцию 102 с частотой R2. Как показано на фиг.4, R1 больше, чем R2.
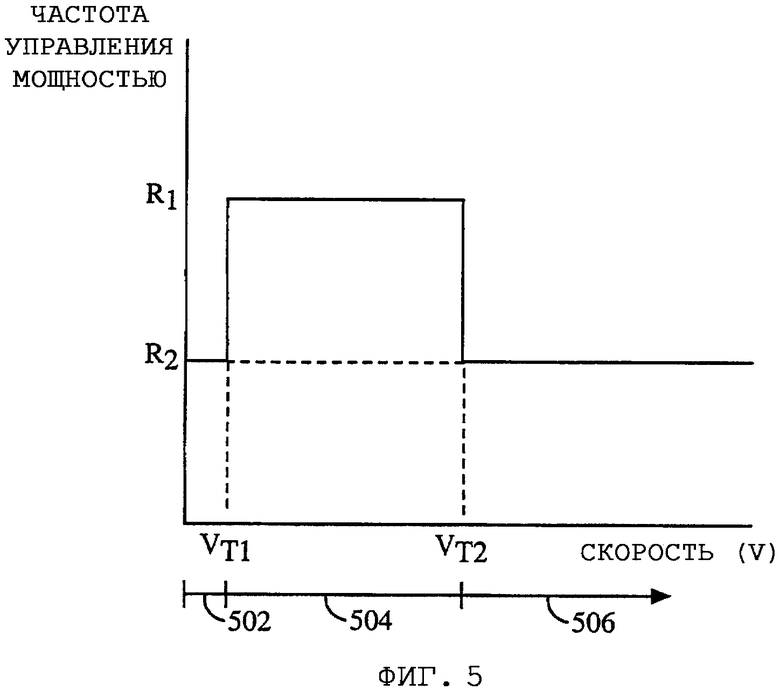
Аналогично реализации, показанной на фиг.4, реализация по фиг.5 изображает две частоты R1 и R2 управления мощностью. Однако, в отличие от реализации по фиг.4, в данной реализации используется три диапазона 502, 504 и 506 скоростей. Порог VT2 скорости разделяет диапазоны 504 и 506 скоростей. Диапазон 506 скоростей включает в себя скорости, которые больше скоростей, включенных в диапазон 504. Порог VT1 скорости разделяет диапазоны 502 и 504 скоростей. Диапазон 504 скоростей включает в себя скорости, которые больше скоростей, включенных в диапазон 502.
В соответствии с реализацией по фиг.5, когда УБС 106 имеет скорость, которая находится в диапазоне 502 скоростей, то оно передает команды управления мощностью на базовую станцию 102 с частотой R2. Однако, когда УБС 106 имеет скорость, которая находится в диапазоне 504, то оно передает команды управления мощностью на базовую станцию 102 с частотой R1. Когда скорость УБС 106 находится в диапазоне 506, то УБС 106 использует частоту R2 команд.
В реализации по фиг.4 и 5 R1больше, чем R2. Однако могут использоваться другие количественные соотношения. Также, так как реализация по фиг.5 имеет три диапазона скоростей, то УБС 106 может использовать три отдельные частоты управления мощностью, вместо двух.
Многие системы связи вынуждены использовать фиксированные частоты команд управления мощностью. Устройства, которые работают в таких системах с фиксированной частотой, передают команды по обратному каналу 118 управления мощностью в периодически возникающие временные интервалы. К сожалению, данные системы с фиксированными частотами не используют мощность эффективным образом.
Настоящее изобретение обеспечивает методы, которые позволяют генерировать множество частот управления мощностью в системе с фиксированной частотой. Данные методы включают в себя генерирование одной или нескольких эффективных частот команд, которые меньше фиксированной частоты команд. Таким образом, мощность может использоваться более эффективно, чем в системах с фиксированной частотой.
Данные эффективные частоты команд реализуются выдачей команд, которые уравновешивают воздействия друг друга. Эти команды (упоминаемые в данной заявке как пустые команды) чередуются с действительными командами управления мощностью (упоминаемыми в данной заявке как активные команды) для получения эффективной частоты команд управления мощностью, которая меньше фиксированной частоты команд.
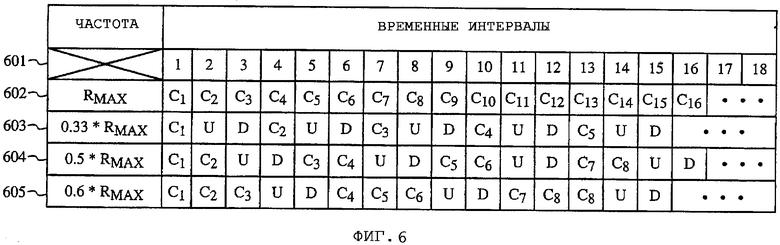
На фиг.6 представлена таблица, иллюстрирующая набор примерных шаблонов команд. Каждый из этих шаблонов создает эффективную частоту управления мощностью, которая меньше фиксированной частоты команд. На фиг.6 в строке 601 перечислены серии временных интервалов в потоке передач по обратному каналу 118 управления мощностью. Данные временные интервалы передают команды последовательным образом, изображенным слева направо.
В строке 602 показан поток 270 команд с фиксированной частотой, имеющий частоту Rmax. Этот поток команд включает в себя множество активных команд управления мощностью, обозначенных как C1, C2, C3 и т. д. Эти активные команды представляют собой или команды на повышение мощности, или команды на понижение мощности. Как описано выше, активные команды генерируются модулем 218 принятия решения управления мощностью посредством сравнения сигнала 260 ОСШ трафика с сигналом 254 целевого ОСШ.
Строки 603, 604 и 605 представляют примеры потоков 270 команд, имеющих эффективные частоты, которые меньше Rmax. Каждый из этих потоков команд включает в себя множество периодически возникающих шаблонов пустых команд, имеющих множество пустых команд. Эти пустые команды показаны на фиг.6 или как U, или как D. Символ U обозначает команду на повышение мощности, тогда как символ D обозначает команду на понижение мощности. Эти шаблоны пустых команд включают в себя чередующиеся команды на повышение и понижение мощности, которые компенсируют друг друга.
Для каждого потока команд строк 603-605 показана соответствующая эффективная частота команд. Эти эффективные частоты команд количественно определяются относительно Rmax. Например, поток строки 603 имеет эффективную частоту управления мощностью, которая составляет 33% от Rmax, поток строки 604 имеет эффективную частоту управления мощностью, которая составляет 50% от Rmax, и поток строки 605 имеет эффективную частоту управления мощностью, которая составляет 60% от Rmax. Важно отметить, что на фиг.6 изображен набор примерных шаблонов, который обеспечивает различные эффективные частоты команд. Другие частоты команд могут быть получены при помощи аналогичных шаблонов.
Модуль 218 принятия решения управления мощностью может ассоциировать каждый из множества шаблонов потоков команд, таких как шаблоны, описанные выше с ссылкой на фиг.6, с конкретным диапазоном скоростей. Таким образом, когда УБС 106 имеет скорость, которая находится в некотором диапазоне, то оно использует соответствующий шаблон потока команд для достижения требуемой частоты команд.
На фиг.7 представлена блок-схема последовательности операций, иллюстрирующая рабочую последовательность, реализующую чувствительное к скорости управление мощностью. Эта рабочая последовательность начинается на этапе 702, где УБС 106 оценивает свою скорость. Этот этап выполняется блоком 212 оценки скорости. Затем на этапе 704 модуль 218 принятия решения управления мощностью определяет частоту команд управления мощностью в ответ на оценку скорости, полученную на этапе 702.
На этапе 704 модуль 218 принятия решения управления мощностью может определить частоту команд управления мощностью в соответствии с различными методиками. Например, этап 704 может содержать понижение частоты команд управления мощностью с первой частоты до второй частоты, когда оцененная скорость превосходит порог VU скорости. С ссылкой на пример на фиг.4, такое понижение имеет место тогда, когда скорость УБС 106 превышает изображенную пороговую скорость VT.
Кроме того, этап 704 может содержать повышение частоты команд управления мощностью с первой частоты до второй частоты, когда оцененная скорость превосходит порог VU скорости. С ссылкой на пример на фиг.5, такое повышение имеет место тогда, когда скорость УБС 106 превышает изображенную пороговую скорость VT1.
На этапе 706 УБС 106 передает сигналы управления мощностью на базовую станцию 102 в соответствии с частотой команд управления мощностью, определенной на этапе 704. Данный этап содержит этап генерирования потока 270 команд модулем 218 принятия решения управления мощностью в соответствии с частотой команд, определенной на этапе 704.
Когда УБС 106 работает в среде с фиксированной частотой команд, то этап 706 содержит генерирование потока команд, имеющего один или несколько пустых шаблонов и один или несколько шаблонов команд. Данный этап создает эффективную частоту команд, которая меньше фиксированной частоты команд. Как описано выше с ссылкой на фиг.6, пустые шаблоны содержат чередующиеся команды на повышение мощности и на понижение мощности, которые компенсируют друг друга.
Этап генерирования потока команд, имеющего один или несколько пустых шаблонов и один или несколько шаблонов команд, может включать в себя этапы обращения к таблице перекодировки (такой как таблица, показанная на фиг.6) в соответствии с частотой команд управления мощностью, определенной на этапе 704, и выбора соответствующего потока команд, который хранится в таблице перекодировки.
Этапы 702-706 могут выполняться с периодически происходящими временными приращениями. Таким образом, на этапе 708 УБС 106 ожидает интервал регулировки частоты команд перед возвратом процедуры обработки на этап 702.
На фиг.8 представлена блок-схема последовательности операций, изображающая подробно этап 704. Его выполнение начинается на этапе 802, где модуль 218 принятия решения управления мощностью отображает скорость, оцененную на этапе 702, на диапазон скоростей. На фиг.4 и 5 представлены примеры таких диапазонов скоростей.
 Затем на этапе 804 модуль 218 принятия решения управления мощностью выбирает частоту, которая сопоставляет диапазон скоростей с частотой команд управления мощностью.
Затем на этапе 804 модуль 218 принятия решения управления мощностью выбирает частоту, которая сопоставляет диапазон скоростей с частотой команд управления мощностью.
Модуль 218 принятия решения управления мощностью может запоминать эти диапазоны скоростей и соответствующие частоты команд в таблице перекодировки (не показана).
IV. Оценка ОСШ
Как описано выше, блок 219 оценки ОСШ оценивает ОСШ сигналов трафика, принимаемых из канала 116 трафика. Данное ОСШ сигнала трафика также упоминается в данной заявке как Eb/Nt трафика. Блок 219 оценки ОСШ вычисляет Eb/Nt трафика согласно приведенному ниже уравнению (1).
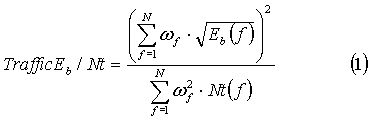
(где traffic Eb/Nt - Eb/Nt трафика)
В уравнении (1) f представляет собой целочисленный индекс, используемый для обозначения конкретного канала 208 демодуляции (ниже упоминаемого в данной заявке как канал f), Tf представляет собой весовой коэффициент, используемый объединителем 250 при объединении последовательности 230 символов, принимаемой от канала f, Eb(f) представляет собой энергию битов составляющей сигнала трафика, обрабатываемой каналом f, Nt(f) представляет собой помехи, испытываемые составляющей сигнала трафика, обрабатываемой каналом f, и N представляет собой количество каналов 208 демодуляции, используемых в УБС 106.
Когда объединитель 210 объединяет каждую последовательность 230 символов оптимальным образом, то блок 219 оценки ОСШ может упростить вычисление Eb/Nt трафика. Вычисление Eb/Nt трафика в соответствии с этим упрощенным подходом включает в себя суммирование Eb(f)/Nt(f) для каждого канала 208 демодуляции.
Вычисление Eb/Nt трафика согласно уравнению (1) или при помощи упрощенного метода суммирования требует определения Eb(f) и Nt(f) для каждого канала 208 демодуляции. Методы определения этих значений приведены ниже.
Nt(f) (т. е. помехи составляющей сигнала трафика в канале f) включает в себя тепловой шум, помехи от базовых станций иных, чем базовая станция 102 и помехи от других составляющих многолучевого сигнала, принимаемых от базовой станции 102. Nt(f) вычисляется посредством измерения общей энергии в полосе и вычитания не создающей помех энергии на этом же пути распространения. Данное вычисление выражено ниже в уравнении (2).
 (2)
(2)
В уравнении (2) Io представляет собой значение энергии в полосе, которое представляет общую энергию, принимаемую в полосе частот.  представляет собой значение не создающей помех энергии.
представляет собой значение не создающей помех энергии.
 представляет собой общую энергию сигналов (включая передачи на другие УБС 106), которая исходит от базовой станции 102, но поступает по пути распространения, который отслеживает канал f. В системах связи МДКР сигналы, передаваемые по одному пути распространения, ортогональны друг другу. Таким образом,
представляет собой общую энергию сигналов (включая передачи на другие УБС 106), которая исходит от базовой станции 102, но поступает по пути распространения, который отслеживает канал f. В системах связи МДКР сигналы, передаваемые по одному пути распространения, ортогональны друг другу. Таким образом,  представляет собой показатель не создающей помех энергии, которая не вносит вклад в ухудшение принимаемого сигнала.
представляет собой показатель не создающей помех энергии, которая не вносит вклад в ухудшение принимаемого сигнала.
В данной заявке предусмотрены два метода вычисления Nt(f). В первом из этих методов используется специальное сообщение, посылаемое между базовой станцией 102 и УБС 106. Во втором из этих методов не требуется, чтобы базовая станция 102 передавала какие-либо специальные сообщения.
Первый метод вычисления Nt(f) упоминается в данной заявке как способ долей пилот-сигнала. В соответствии с данным способом базовая станция 102 передает данные сигнализации, упоминаемые в данной заявке как доля пилот-сигнала. Для конкретного пилот-сигнала доля пилот-сигнала указывает отношение энергии пилот-сигнала к общей энергии, передаваемой базовой станцией 102. Уравнение (3), приведенное ниже, предусматривает выражение доли пилот-сигнала.
 (3)
(3)
В уравнении (3) пилот-сигнал Ес представляет энергию в «чипе» (элементарной посылке) пилот-сигнала, передаваемого базовой станцией 102, и Ior представляет собой общую энергию сигнала, передаваемого базовой станцией 102. Ior нормируется шириной полосы УБС 106. Таким образом, доля пилот-сигнала, как выражено в уравнении (3), является безразмерной величиной.
Базовая станция 102 генерирует сообщение, содержащее долю пилот-сигнала, и передает это сообщение на УБС 106 по каналу, такому как канал 116 трафика или канал синхронизации (не показан). Когда доля пилот-сигнала передается по каналу 116 трафика, то каждый канал 208 демодуляции пропускает долю пилот-сигнала на объединитель 210 в качестве информации, содержащейся в его соответствующей последовательности 230 символов. Объединитель 210 отделяет сообщения с долей пилот-сигнала от каждой последовательности 230 символов.
Совместно с приемом доли пилот-сигнала УБС 106 измеряет энергию принимаемого чипа пилот-сигнала. Эта измеренная энергия подается на блок 219 оценки ОСШ объединителя 210.
Как описано выше, базовая станция 102 передает пилот-сигнал по каналу 114 пилот-сигнала. Каждый канал 208 демодуляции принимает и обрабатывает составляющую пилот-сигнала в соответствующий набор 344 отфильтрованных последовательностей пилот-сигнала. Для измерения энергии принимаемого чипа пилот-сигнала демодулятор 312 данных вычисляет «сумму квадратов» для индивидуальных последовательностей в наборе 344 последовательностей. Например, в реализациях КФМ, где набор 344 последовательностей включает в себя синфазную (I) отфильтрованную последовательность 346 пилот-сигнала и квадратурную (Q) отфильтрованную последовательность 348 пилот-сигнала, демодулятор 312 данных выполняет вычисление, выраженное ниже в уравнении (4).
пилот-сигнал Ес=I2+Q2 (4)
В уравнении (4) пилот-сигнал Ес представляет оценку энергии чипа набора 344 отфильтрованных последовательностей пилот-сигнала, I представляет значение синфазной отфильтрованной последовательности 346 пилот-сигнала, и Q представляет значение квадратурной отфильтрованной последовательности 348 пилот-сигнала. Демодулятор 312 данных посылает пилот-сигнал Ес на блок 219 оценки ОСШ в объединителе 210.
Как показано выше в уравнении (2),  требуется для вычисления Nt(f), где f обозначает конкретный канал 208 демодуляции. Следовательно, при приеме пилот-сигнала Ес блок 219 оценки ОСШ вычисляет оценку
требуется для вычисления Nt(f), где f обозначает конкретный канал 208 демодуляции. Следовательно, при приеме пилот-сигнала Ес блок 219 оценки ОСШ вычисляет оценку  , которая принимается каналом f. Это вычисление выражено ниже в уравнении (5).
, которая принимается каналом f. Это вычисление выражено ниже в уравнении (5).
 (5)
(5)
Для завершения вычисления по уравнению (2) модуль 206 автоматической регулировки усиления (АРУ) определяет значение Io (т.е. энергию в полосе) и посылает это определенное значение на блок 219 оценки ОСШ в виде сигнала 248 Io. После определения Io и  для канала f объединитель 210 вычисляет Nt(f) посредством выполнения уравнения (2).
для канала f объединитель 210 вычисляет Nt(f) посредством выполнения уравнения (2).
Альтернативный способу долей пилот-сигнала вариант вычисления Nt(f) упоминается в данной заявке как способ рассеяния пилот-сигнала. Согласно этому способу, УБС 106 не обеспечивается долей пилот-сигнала. Вместо этого УБС 106 оценивает шум Nt(f) компилированием информации, основанной на изменениях энергии принимаемого пилот-сигнала. А именно, УБС 106 вычисляет оценку Nt(f) согласно уравнению (6).

В уравнении (6) XI(i) представляет собой синфазную отфильтрованную последовательность 346 пилот-сигнала, XQ(i) представляет собой квадратурную отфильтрованную последовательность 348 пилот-сигнала, и N представляет собой предварительно определенное количество отсчетов, которое выбирается для вычисления Nt(f). Примерным значением N является 24.
В дополнение к вычислению Nt(f) определение Eb/Nt по уравнению (1) требует вычисления энергии битов данных трафика (т. е. Eb(f)) для каждого канала 208 демодуляции. Для каждого канала 208 демодуляции соответствующий демодулятор 312 данных выполняет это вычисление.
Энергия Eb(f) битов данных трафика выводится из энергии Es(f) символов данных трафика. Демодулятор 312 данных вычисляет Es(f) посредством обработки набора 332 последовательностей трафика полосы модулирующих частот.
Для измерения энергии принимаемого сигнала трафика демодулятор 312 данных вычисляет «сумму квадратов» для индивидуальных последовательностей в наборе 332 последовательностей. Например, в реализациях КФМ, где набор 332 последовательностей включает в себя синфазную последовательность 334 трафика и квадратурную последовательность 336 трафика, демодулятор 312 данных выполняет вычисление, выраженное ниже в уравнении (8).
Es(f)=I2+Q2 (8)
В уравнении (8) I представляет значение синфазной последовательности 334 трафика, и Q представляет значение квадратурной последовательности 336 трафика. В дополнение к вычислению Es(f) по уравнению (8) демодулятор 312 может отфильтровать результат уравнения (8), таким образом, получая сглаженную энергию Es(f).
После вычисления Es(f) демодулятор 312 данных определяет Eb согласно зависимости, выраженной ниже в уравнении (9).
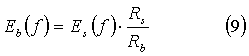
В уравнении (9) Rs представляет частоту символов набора 332 последовательностей трафика полосы модулирующих частот, и Rb представляет эффективную частоту битов набора 332 последовательностей трафика полосы модулирующих частот.
После выполнения уравнения (9) каждый демодулятор 312 данных подает соответствующую Eb(f) на блок 219 оценки ОСШ. Таким образом, после определения Nt(f) и Eb(f) для каждого канала 208 демодуляции блок 219 оценки ОСШ может вычислить Eb/Nt согласно уравнению (1) или согласно упрощенному методу вычисления Eb/Nt, который включает в себя суммирование каждого значения Eb(f)/Nt(f).
V. Блок оценки скорости
Как описано выше с ссылкой на фиг.2, блок 212 оценки скорости принимает сигнал 244 управления от модуля 206 АРУ и набор 246 последовательностей пилот-сигнала полосы модулирующих частот от одного из каналов 208 демодуляции. Из этих входных сигналов блок 212 оценки скорости генерирует сигнал 242 оценки скорости, который посылается на модуль 218 принятия решения управления мощностью для обеспечения чувствительного к скорости управления мощностью.
Блок 212 оценки скорости использует характеристики замирания многолучевых передач для оценки скорости УБС 106. Как описано выше, физическая местность и сооружение, окружающие УБС 106, создают пути распространения множества сигналов от базовой станции 102 к УБС 106. Каждая многолучевая составляющая может быть смоделирована как составной сигнал, имеющий составляющую медленного замирания и составляющую быстрого замирания.
На фиг.9А представлен пример такого составного сигнала, принимаемого УБС 106. Этот сигнал, который испытывает изменения во времени мощности принимаемого сигнала вследствие составляющих медленного замирания и быстрого замирания, показан на фиг.9А. Соответствующая составляющая медленного замирания составного принимаемого сигнала показана на фиг.9В. Соответствующая составляющая быстрого замирания, или релеевского замирания, составного принимаемого сигнала показана на фиг.9С. Модуль 206 АРУ может компенсировать почти все воздействия такого медленного замирания. Кроме того, модуль 206 АРУ может компенсировать часть воздействий такого релеевского замирания.
Блок 212 оценки скорости выполняет измерение мощности одной многолучевой составляющей во времени для оценки скорости УБС 106. Эти оценки основываются на том, сколько раз мощность этой многолучевой составляющей пересекает половину ее среднеквадратичного уровня мощности за данный период времени. Это величина упоминается в данной заявке как частота пересечений уровня.
Более конкретно, блок 212 оценки скорости основывает значение сигнала 242 оценки скорости на числе пересечений составляющей быстрого замирания составляющей многолучевого сигнала порога половинного среднеквадратичного уровня мощности за данный период времени. Этот порог не является единственным порогом, который может использоваться для оценки скорости. Любые другие дробные или кратные значения среднеквадратичного уровня мощности могут быть выбраны в качестве порогового уровня. Однако, использование половинного среднеквадратичного уровня мощности в качестве порога приводит к максимальной частоте пересечения уровня для данной скорости.
Так как блок 212 оценки скорости оценивает мощность одной многолучевой составляющей, он обрабатывает набор 246 последовательностей пилот-сигнала полосы модулирующих частот от одного из каналов 208 демодуляции, который представляет отдельный многолучевой пилот-сигнал.
Так как модуль 206 АРУ поддерживает набор 220 сигналов, по существу, на постоянном уровне мощности, то он по существу исключает информацию, которая необходима для блока 212 оценки скорости, чтобы оценивать мощность многолучевой составляющей, принимаемой антенным сегментом 202. Поэтому, для измерения мощности отдельной многолучевой составляющей должны быть исключены регулировки усиления, выполняемые модулем 206 АРУ.
Воздействия регулировки усиления модуля 206 АРУ исключаются масштабированием, которое регулирует усиленные сигналы посредством обратной величины усиления, управляемого модулем 206 АРУ. На фиг.10 представлена блок-схема, иллюстрирующая реализацию модуля 206 АРУ, который обеспечивает такое масштабирование.
На фиг.10 изображен блок 1002 оценки мощности, узел 1004 суммирования, фильтр 1006 нижних частот, цифроаналоговый преобразователь (ЦАП) 1008, инвертирующий узел 1010 и логарифмически-линейный преобразователь 1012. Инвертирующий узел 1010 и логарифмически-линейный преобразователь 1012 вместе включены в модуль 1014 масштабирования.
Блок 1002 оценки мощности принимает набор 220 сигналов полосы модулирующих частот (т. е. составляющие 222 и 224 сигналов) и оценивает их мгновенную мощность. Блок 1002 оценки мощности выводит сигнал 1020 оценки мощности, который посылается на узел 1004 суммирования. В узле 1004 суммирования сигнал 1020 оценки мощности вычитается из предварительно определенной точки 1022 настройки. Предварительно определенная точка 1022 настройки выбирается так, чтобы представлять значение мощности около верхней границы аналого-цифрового преобразователя(ей) (АЦП) во входном РЧ-блоке 204, которые используются для получения набора 220 сигналов полосы модулирующих частот. Когда сигнал 1020 оценки мощности превышает точку 1022 настройки, узел 1004 суммирования вырабатывает сигнал 1024 регулировки, который понижает коэффициент усиления усилительного компонента(ов) во входном РЧ-блоке 204. Однако, когда сигнал 1020 оценки мощности меньше точки 1022 настройки, сигнал 1024 регулировки повышает коэффициент усиления такого усилительного компонента(ов).
Сигнал 1024 регулировки посылается на фильтр 1006 нижних частот, который вырабатывает цифровой сигнал 1026 управления. Цифровой сигнал 1026 управления посылается на (ЦАП) 1008 для генерирования сигнала 240 управления усилением, который посылается на входной РЧ-блок 204. ЦАП 1008 может быть исключен для реализаций входного РЧ-блока 204, которые принимают цифровые сигналы 240 управления усилением. Как описано выше, усилительный компонент(ы) во входном РЧ-блоке 204 изменяют свой коэффициент усиления в соответствии со значением сигнала 240 управления усилением.
Цифровой сигнал 1026 управления также посылается на компонент 1014 масштабирования, где он вводится в инвертирующий узел 1010. Инвертирующий узел 1010 показан в виде умножителя, имеющего коэффициент умножения -1. Однако могут использоваться другие подходящие реализации. Инвертирующий узел 1010 генерирует инвертированный сигнал 1028 управления, который посылается на логарифмически-линейный преобразователь 1012. Логарифмически-линейный преобразователь 1012 работает в соответствии с передаточной функцией. Данная передаточная функция представляет собой обратную величину функции, которая определяет зависимость между значениями сигнала 240 управления усилением и коэффициентом усиления входного РЧ-блока 204. В результате этой передаточной функции логарифмически-линейный преобразователь 1012 вырабатывает оценку 244 напряжения, которая представляет собой оценку напряжения сигнала составляющей, принимаемую антенным сегментом 202.
Модуль 1014 масштабирования обеспечивает обработку сигнала, достаточную для точного определения частоты пересечения уровня, когда ОСШ принимаемого сигнала имеет высокое значение. Это объясняется тем, что шумовые составляющие в принимаемом сигнале являются незначительными по отношению к мощности принимаемого сигнала и, таким образом, не оказывают отрицательного влияния на определение частоты пересечения уровня. Однако, когда шумовые составляющие представляют собой существенный вклад в общую мощность принимаемого сигнала, то шумовые составляющие оказывают отрицательное влияние на определение частоты пересечения уровня, когда используется единственный порог.
Частота составляющей быстрого замирания составного сигнала может оцениваться с использованием ожидаемого для приемника диапазона скоростей. Время интегрирования пилот-сигнала должно быть существенно меньше периода быстрого замирания, чтобы надежно обнаруживать пересечения уровня. Так как это значение времени является конечным, когда канал испытывает замирание, то измеренная мощность пилот-сигнала имеет некоторое значение шума, связанного с ним. Это значение шума может быть представлено в качестве измерения ОСШ.
ОСШ мощности интегрированного пилот-сигнала прямо пропорционально величине, выраженной ниже в уравнении (10).
Iorhat0·(Ecp/Ior)/(Ioc+Nt) (10)
В уравнении (10) Iorhat0 представляет значение мощности сигнала, принимаемой УБС 106 по пути распространения 0, (Ecp/Ior) представляет отношение энергии пилот-сигнала к общей энергии, передаваемой базовой станцией 102, и (Ioc+Nt) представляет общие помехи, обусловленные соседними базовыми станциями и тепловым шумом.
Поэтому, как указано уравнением (10), когда общая принимаемая мощность пилот-сигнала низкая, или когда связанные с ней уровни помех и шума высокие, то измерение мощности пилот-сигнала является зашумленным. Этот шум вызывает многочисленные пересечения оценкой мощности пилот-сигнала порогового значения пересечения уровня. И наоборот, когда пилот-сигнал принимается в свободной от шума системе, то его мощность пересекает пороговое значение пересечения уровня только один раз.
Для снижения влияния ОСШ пилот-сигнала на его частоту пересечения уровня блок 212 оценки скорости использует гистерезис пересечения уровня. Этот признак гистерезиса использует верхний порог и нижний порог. В соответствии с этим признаком считается, что амплитуда сигнала не пересекает используемый пороговый уровень, если только она не начинается ниже нижнего порога гистерезиса (установленного на N дБ ниже используемого порогового уровня), и затем пересекает верхний порог гистерезиса (установленный на М дБ выше используемого порогового уровня), или наоборот.
Для конкретного сигнала пороговый уровень, который приводит к максимальному количеству пересечений уровня, составляет половину среднеквадратичной мощности сигнала. Однако может использоваться любой уровень относительно уровня среднеквадратичной мощности. В примерной реализации М и N каждое устанавливается на 3 дБ. Однако эти значения могут отличаться.
Поэтому, признак гистерезиса, используемый блоком 212 оценки скорости, препятствует учету небольших изменений при измерении амплитуды сигнала, которые составляют менее (M+N) дБ, при вычислении частоты пересечения уровня. Алгоритм гистерезиса уровня, используемый блоком 212 оценки скорости, может быть выражен следующим псевдокодом. В этом псевдокоде s(n) представляет амплитуду символа в момент времени n, ТН представляет верхний пороговый уровень гистерезиса, и TL представляет нижний пороговый уровень гистерезиса.
If(s(n)<TL){
If(thresholdFlag==0){
LevelCrossingCounter++;
}
thresholdFlag=1;
}
else if(s(n)>TH){
if(thresholdFlag==1)
levelCrossingCounter++;
}
thresholdFlag=0;
}
На фиг.11 представлен график, изображающий применение алгоритма гистерезиса уровней к лучу 1110 многолучевого распространения во времени в зашумленной среде. Обычно быстрое замирание создает сигналы, такие как сигнал, показанный на фиг.9С. Однако вклад от шумовой составляющей приводит к зашумленной оценке многолучевого сигнала. Этот верхний порог гистерезиса обозначается как ТН, и нижний порог гистерезиса обозначается как TL. Предварительно определенный пороговый уровень для определения пересечений уровня (не показаны) находится на уровне мощности, который расположен между порогами ТН и TL гистерезиса. Когда алгоритм гистерезиса применяется к этой зашумленной оценке сигнала, то считается, что пересечения уровня происходят только в точках, обозначенных «Х» на фиг.11.
На фиг.12 представлена блок-схема, иллюстрирующая первую реализацию блока 212 оценки скорости, которая использует описанный выше алгоритм гистерезиса. Данная реализация включает в себя узлы 1202а и 1202b умножения, фильтр 1204 нижних частот, модуль 1206 вычисления мощности, очередь 1208 символов, модуль 1210 вычисления среднеквадратичной мощности, модуль 1212 вычисления порога, счетчик 1214 и таблицу 1216 перекодировки.
Оценка 244 напряжения принимается от модуля 206 АРУ узлами 1202а и 1202b умножения. В этих узлах оценка 244 напряжения умножается на соответствующую последовательность из набора 338 последовательностей пилот-сигнала полосы модулирующих частот.
Узлы 1202а и 1202b умножения создают набор 1230 последовательностей, который представляет набор 338 последовательностей полосы модулирующих частот с исключенными влияниями стабилизации мощности модуля 206 АРУ. Набор 1230 последовательностей включает в себя синфазную последовательность 1232 и квадратурную последовательность 1234.
Набор 1230 последовательностей посылается на фильтр 1204 нижних частот, который создает набор 1234 отфильтрованных последовательностей, включающий в себя синфазную последовательность 1235 и квадратурную последовательность 1236. Модуль 1206 вычисления мощности принимает набор 1234 отфильтрованных последовательностей и вычисляет его мгновенную мощность.
Для вычисления мгновенной мощности модуль 1206 вычисления мощности вычисляет сумму квадратов каждой последовательности в наборе 1234 отфильтрованных последовательностей и вычисляет квадратный корень из этой суммы. Модуль 1206 вычисления мощности определяет данную мгновенную мощность в виде последовательности 1237 энергий. Сигнал 1237 мощности посылается в очередь 1208 и на модуль 1210 вычисления среднеквадратичной мощности.
Модуль 1210 вычисления среднеквадратичной мощности вычисляет последовательность 1238 среднеквадратичных мощностей с использованием предварительно определенного количества последовательных значений последовательности 1237 энергий. Значение последовательности среднеквадратичных мощностей посылается на модуль 1212 вычисления порога. Модуль 1212 вычисления порога использует предварительно определенные значения (М и N) гистерезиса, как описано выше, для вычисления верхнего и нижнего порогов 1240 и 1242 пересечения уровня. Эти пороги подаются на счетчик 1214 пересечения уровня.
Очередь 1208 представляет собой буфер обратного магазинного типа. Очередь 1208 имеет глубину, которая соответствует количеству символов, используемых при исполнении вычислений, выполняемых модулем 1210 вычисления среднеквадратичной мощности. Таким образом, очередь 1208 символов задерживает последовательность 1237 энергий и посылает задержанную последовательность 1244 энергий на счетчик 1214.
Счетчик 1214 подсчитывает количество пересечений уровня последовательностью 1244 энергий, используя пороги 1240 и 1242, для обеспечения гистерезиса при подсчете. При выполнении такого подсчета счетчик 1214 выводит число 1246, которое посылается в таблицу 1216 перекодировки.
Таблица 1216 перекодировки отображает количество пересечений уровня (указываемое числом 1246), которое происходит за данный период времени, на оцененную скорость. Оценка скорости выводится в качестве оценки 246 скорости. Альтернативно, блок 212 оценки скорости может быть реализован без таблицы 1216 перекодировки. В таких реализациях число 1246 непосредственно используется в качестве оценки скорости.
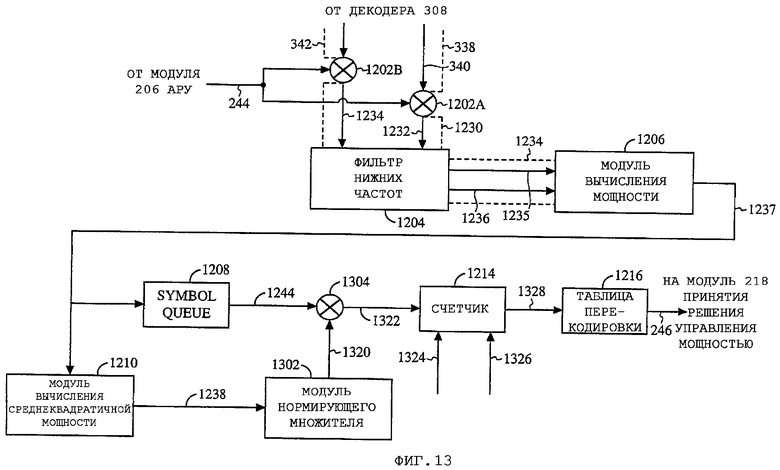
Вторая реализация блока 212 оценки скорости показана на фиг.13. Данная реализация аналогична реализации, показанной на фиг.12. На самом деле, обе реализации одинаковы от приема оценки 244 напряжения до генерирования последовательности 1237 энергий. Однако вторая реализация вычисляет пересечения уровня другим образом.
Во второй реализации последовательность 1237 энергий посылается в очередь 1208 и на модуль 1210 вычисления среднеквадратичной мощности, как и в первой реализации. Однако во второй реализации модуль 1210 вычисления среднеквадратичной мощности посылает последовательность 1238 среднеквадратичных мощностей на модуль 1302 нормирующего множителя. Модуль 1302 нормирующего множителя вычисляет и выводит 2/х, где х представляет последовательность 1238 среднеквадратичных мощностей, и 2/х представляет нормирующий множитель 1320.
Нормирующий множитель 1320 посылается на узел 1304 умножения, который также принимает задержанную последовательность 1244 энергий из очереди 1208. Узел 1304 умножения умножает эти входные сигналы и генерирует нормированную последовательность 1322. Нормированная последовательность 1322 представляет задержанную последовательность 1244 энергий, нормированную при помощи половинной последовательности 1238 среднеквадратичных мощностей.
Нормированная последовательность 1322 посылается на счетчик 1214, который подсчитывает количество пересечений уровня последовательностью 1322. Однако в отличие от реализации по фиг.12, где счетчик 1214 принимает изменяющиеся пороги гистерезиса, в реализации по фиг.13, счетчик 1214 принимает пороги гистерезиса, которые остаются постоянными. Эти постоянные пороги показаны на фиг.13 в виде верхнего порога 1324 и нижнего порога 1326. В этой реализации могут использоваться постоянные значения гистерезиса, так как последовательность 1322 нормируется при помощи значения, пропорционального последовательности 1238 среднеквадратичных мощностей.
Счетчик 1214 выводит число 1328, которое посылается в таблицу 1216 поиска для определения оценки 246 скорости. Во второй реализации, как и в первой реализации, таблица 1216 перекодировки является необязательной. Таким образом, число 1328 может использоваться непосредственно, или из него может вычисляться оценка 246 скорости.
VI. Заключение
Хотя выше описаны различные варианты выполнения настоящего изобретения, необходимо понять, что они представлены только в качестве примера, а не ограничения. Таким образом, широта и объем настоящего изобретения не должны ограничиваться никаким из вышеописанных примерных вариантов выполнения, но должны определяться только в соответствии с нижеследующей формулой изобретения и ее эквивалентами.
Например, вышеприведенное описание включает в себя наборы сигналов и символов, имеющие синфазные и квадратурные составляющие. Эта наборы связаны с модуляцией КФМ. Однако в настоящем изобретении могут использоваться наборы сигналов других видов, которые связаны с другими методами модуляции. Эти наборы могут включать в себя любое количество составляющих. Например, такие наборы могут быть связаны с двоичной фазовой манипуляцией (ДФМ) и включать в себя только одну составляющую.
Кроме того, хотя описанные выше реализации блока 212 оценки скорости выполняют оценку скорости с использованием измерений пересечения уровня, блок 212 оценки скорости может выполнять такую оценку при помощи периодического контроля местоположения устройства посредством услуг, таких как глобальная система навигации и определения местоположения (GPS).
Также, реализации фильтра 318 системы временного отслеживания могут включать в себя множество трактов фильтра, где каждый тракт фильтра принимает усиленный сигнал, имеющий значение, которое зависит от скорости УБС 106.
Кроме того, методы настоящего изобретения могут использоваться в других средах связи, которые не связаны со стандартами IS-95 или МДКР.

Изобретение относится к технике беспроводной связи. Оценивается скорость устройства беспроводной связи (УБС). В соответствии с данной оценкой определяется частота команд управления мощностью. УБС передает сигналы управления мощностью на базовую станцию в соответствии с частотой команд управления мощностью. Частота команд управления мощностью может определяться при помощи отображения оцененной скорости на диапазон скоростей и выбора частоты, которая соответствует диапазону скоростей, в качестве частоты команд управления мощностью. Скорость оценивается посредством измерения частоты пересечения уровня многолучевого сигнала. Технический результат заключается в оптимизации процесса управления уровнями мощности передачи сигналов с учетом скорости мобильного устройства. 3 н. и 20 з.п. ф-лы, 13 ил.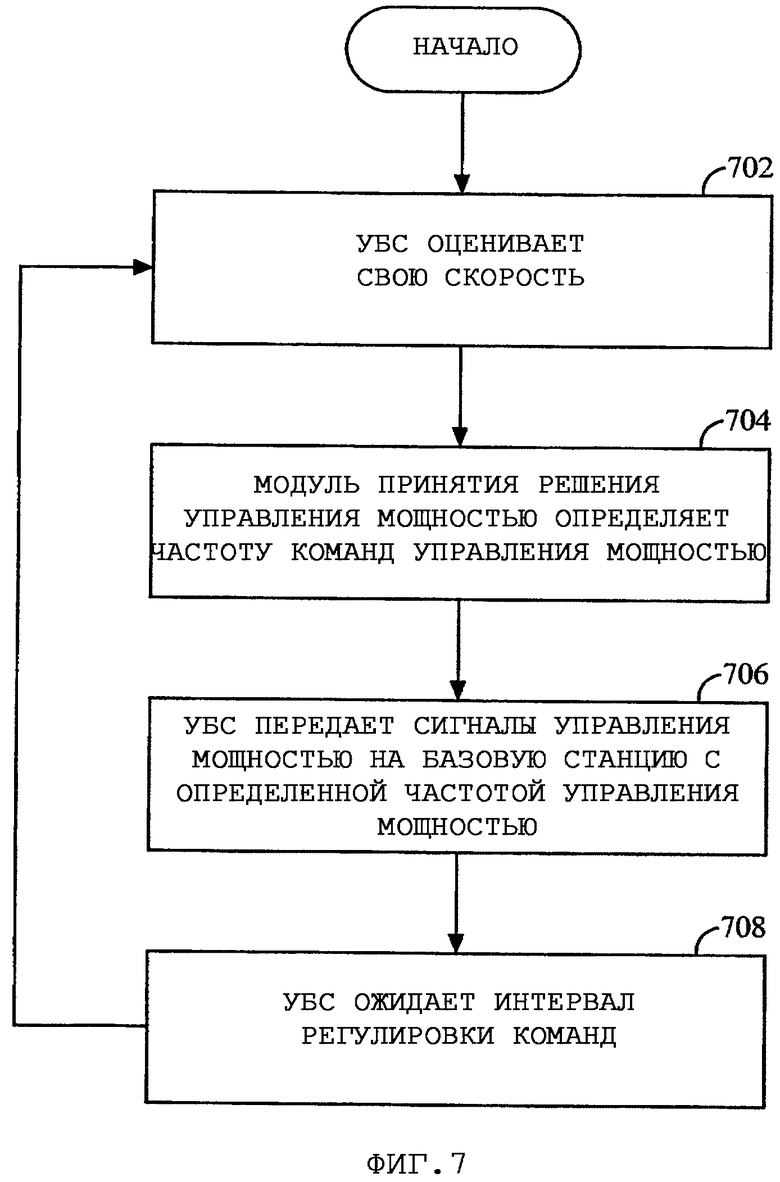
передачи сигналов управления мощностью на базовую станцию (102) в соответствии с частотой команд управления мощностью.
средство для передачи сигналов управления мощностью на базовую станцию (102) в соответствии с частотой команд управления мощностью.
| US 6075815 А, 13.06.2000 | |||
| DE 19938494 A1, 22.03.2001 | |||
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ ОРТОГОНАЛЬНОГО КАНАЛА И КВАЗИОРТОГОНАЛЬНОГО КАНАЛА В СИСТЕМЕ СВЯЗИ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2179370C2 |
| Устройство для получения согласованного фильтра | 1978 |
|
SU812119A2 |

