Перекрестная ссылка на родственные заявки
По заявке испрашивается приоритет в соответствии с более ранней датой подачи заявки KR 10-2005-0051093, поданной 14 июня 2005 г., заявки KR 10-2005-0051099, поданной 14 июня 2005 г., и заявки KR 10-2005-0054397, поданной 23 июня 2005 г., содержание которых полностью включено в настоящее описание в качестве ссылки.
Область, к которой относится изобретение
Настоящее изобретение относится к способу сопоставления изображения, сфотографированного камерой, с данными карты в портативном терминале. Настоящее изобретение также относится к способу направления по маршруту перемещения с использованием изображения, сфотографированного камерой в портативном терминале.
УРОВЕНЬ ТЕХНИКИ
В Глобальной Системе Позиционирования (GPS), для максимизации охвата пользователей в любой точке на поверхности Земли, в шести орбитальных плоскостях позиционированы четыре или большее количество спутников GPS на плоскость, с каждым GPS спутником, пересекающим экватор Земли под углом наклона в 55 градусов. Для передачи навигационных сообщений приблизительно каждые 12 часов каждый спутник GPS делает круг вокруг земли.
Приемник GPS принимает навигационные сообщения, периодически передаваемые по меньшей мере из четырех или большего количества спутников GPS из числа спутников GPS. Приемник GPS для вычисления своего вектора положения определяет расстояние между приемником и спутниками GPS и вектор положения (пространственную координату местоположения) спутников GPS.
В навигационной системе, оборудованной приемником GPS, вектор положения, обнаруженный приемником GPS, сопоставляют с картой относительно цифровой карты, которая должна отображаться на экране устройства отображения. В качестве дополнительной услуги навигационная система обеспечивает услугу направления по маршруту перемещения, предоставляющую информацию относительно текущей позиции пользователя или маршрута перемещения из отправного пункта в пункт назначения. Соответственно, пользователь навигационной системы, принимая услугу направления по маршруту перемещения навигационной системы, может просто находить пункт назначения из отправного пункта или текущего местоположения.
В последнее время навигационные системы были установлены на различные мобильные терминалы, такие как портативный терминал, персональный цифровой ассистент (PDA, ПЦА), телефон iBook и смарт (интеллектуальный) телефон. Далее, для удобства, мобильный терминал будет просто определен как портативный терминал. Соответственно, посредством маршрута перемещения может быть осуществлено направление пользователя в пункт назначения, даже если пользователь идет в пункт назначения пешком.
Если пользователю портативного терминала, оборудованного навигационной системой, обеспечивают услугу для наведения пользователя в предварительно определенный пункт назначения по маршруту перемещения, то, обычно, пользователь должен проверить, что действительный объект на улице соответствует объекту, отображенному на цифровой карте на устройстве отображения портативного терминала.
В этом случае пользователь должен визуально проверить и сопоставить один за другим объект на карте с действительным объектом на улице. Например, пользователь должен будет сопоставить здание, которое он действительно наблюдает на улице, с этим зданием, изображенным на цифровой карте, чтобы удостовериться, что предварительно описанное здание ("A"), отображенное на экране, идентично действительному зданию. После этого осуществляется распознавание относительно того, какое здание на карте действительно соответствует зданию "A" на экране.
В частности, если здание объекта расположено на расстоянии от текущего местоположения пользователя, пользователь должен лично переместиться в местоположение здания объекта для получения информации относительно здания объекта. При перемещении в местоположение здания объекта пользователь может подтвердить, что требуемое ему здание соответствует зданию объекта на карте, только если информация, полученная относительно здания объекта сопоставлена со зданием, отображенным на карте.
Кроме того, если пользователь перемещается в пункт назначения, принимая маршрут перемещения через навигационную систему, размещенную на портативном терминале, навигационная система, обычно, отображает карту на экране и направляет пользователя по маршруту перемещения. В результате пользователь должен найти пункт назначения посредством проверки зданий на карте, одного за другим, относительно действительных зданий объектов на улице.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на сопоставление изображения, сфотографированного камерой, с данными карты в портативном терминале.
Дополнительные признаки и преимущества изобретения будут сформулированы в последующем описании и станут частично ясны из описания или могут быть изучены при практическом осуществлении изобретения. Решение задач и другие преимущества изобретения будут реализованы и достигнуты посредством структуры, в частности указанной в настоящем описании и формуле изобретения этой заявки, а также в приложенных чертежах.
Для достижения указанных и других преимуществ и в соответствии с задачей настоящего изобретения, как реализовано и описано в общих чертах, настоящее изобретение реализуется посредством способа сопоставления изображения, сфотографированного камерой, с данными карты в портативном терминале. Способ включает фотографирование по меньшей мере одного объекта камерой, размещенной на портативном терминале, определение информации местоположения камеры, фотографирующей по меньшей мере один объект, вычисление информации местоположения по меньшей мере одного сфотографированного объекта, вычисление информации местоположения по меньшей мере одного объекта отображения, содержащегося в данных карты, на основе текущего местоположения камеры, сравнение информации местоположения по меньшей мере одного сфотографированного объекта с информацией местоположения по меньшей мере одного объекта отображения и сопоставление по меньшей мере одного объекта отображения с по меньшей мере одним сфотографированным объектом на основе соответствующей ему информации местоположения.
Согласно одному аспекту изобретения определение информации местоположения камеры, фотографирующей по меньшей мере один объект, включает определение текущего местоположения камеры в соответствии с сообщениями GPS, принятыми приемником GPS, размещенным на портативном терминале, определение полярного угла центральной оси камеры с использованием датчика азимута, размещенного на портативном терминале, и определение наклона камеры с использованием датчика наклона, размещенного на портативном терминале.
Предпочтительно, информацию местоположения по меньшей мере одного сфотографированного объекта и информацию местоположения по меньшей мере одного объекта отображения вычисляют из определенной информации местоположения камеры на основе текущего местоположения камеры и полярного угла центральной оси камеры. Предпочтительно, информация местоположения камеры содержит текущее местоположение камеры и полярный угол центральной оси камеры.
Согласно другому аспекту изобретения вычисление информации местоположения по меньшей мере одного сфотографированного объекта включает выделение контура по меньшей мере из сфотографированного объекта, установление точки вычисления информации местоположения по меньшей мере одного объекта из выделенного контура, вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры и вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения.
Предпочтительно, выделение контура по меньшей мере из одного объекта выполняют посредством захвата по меньшей мере одного сфотографированного объекта. Предпочтительно, информация местоположения камеры дополнительно содержит наклон камеры. Предпочтительно, вычисление информации местоположения по меньшей мере одного сфотографированного объекта дополнительно включает корректирование вычисленного расстояния от текущего местоположения камеры до точки вычисления информации местоположения.
Согласно дополнительному аспекту изобретения вычисление информации местоположения по меньшей мере одного объекта отображения на основе текущего местоположения камеры включает сопоставление информации местоположения камеры с данными карты, установление точки вычисления информации местоположения по меньшей мере одного объекта отображения и вычисление информации местоположения точки вычисления информации местоположения по меньшей мере одного объекта отображения на основе местоположения камеры, сопоставленного с данными карты. Предпочтительно, информация местоположения камеры содержит текущее местоположение камеры и полярный угол центральной оси камеры.
Предпочтительно, вычисление информации местоположения точки вычисления информации местоположения по меньшей мере одного объекта отображения содержит вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения по меньшей мере одного объекта отображения и вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры.
Предпочтительно, сопоставление по меньшей мере одного объекта отображения по меньшей мере одному сфотографированному объекту выполняют, когда величина ошибки между информацией местоположения по меньшей мере одного сфотографированного объекта и информацией местоположения по меньшей мере одного объекта отображения находится в пределах предварительно определенной величины.
Согласно еще одному аспекту изобретения способ дополнительно включает считывание из текстовой информации данных карты по меньшей мере одного объекта отображения, сопоставленного по меньшей мере с одним сфотографированным объектом, вставку текстовой информации считывания в соответствующие местоположения в пределах по меньшей мере одного сфотографированного объекта и отображение по меньшей мере одного сфотографированного объекта, имеющего вставленную в него текстовую информацию считывания.
Предпочтительно, вставка текстовой информации считывания в соответствующие местоположения в пределах по меньшей мере одного сфотографированного объекта включает определение местоположения отображения текстовой информации в местоположении по меньшей мере одного сфотографированного объекта, сопоставленного по меньшей мере одному объекту отображения, и нанесение текстовой информации по меньшей мере одного объекта отображения на определенное местоположение отображения.
Предпочтительно, отображение по меньшей мере одного сфотографированного объекта, имеющего вставленную в него текстовую информацию считывания, включает определение цвета отображения и отображение контура по меньшей мере одного сфотографированного объекта и текстовой информации определенным цветом отображения.
Согласно другому варианту осуществления настоящего изобретения способ наведения по маршруту перемещения с использованием изображения, сфотографированного камерой, в портативном терминале включает поиск маршрута перемещения из отправного пункта в пункт назначения с использованием данных карты, которые хранятся в портативном терминале, определение информации местоположения камеры, размещенной в портативном терминале, сопоставление по меньшей мере одного объекта отображения, содержащегося в данных карты, по меньшей мере одному объекту, сфотографированному камерой, определение объекта наведения из числа по меньшей мере одного объекта, сфотографированного камерой, вставку пиктограммы объекта наведения в местоположение объекта наведения, определенного по меньшей мере одним сфотографированным объектом, отображение пиктограммы объекта наведения на экране портативного терминала и наведение по маршруту перемещения.
Согласно одному аспекту изобретения определение информации местоположения камеры, размещенной в портативном терминале, содержит определение текущего местоположения камеры в соответствии с сообщениями GPS, принятыми приемником GPS, размещенном на портативном терминале, определение полярного угла центральной оси камеры с использованием датчика азимута, размещенного на портативном терминале и определение наклона камеры с использованием датчика наклона, размещенного на портативном терминале.
Согласно другому аспекту изобретения сопоставление по меньшей мере одного объекта отображения, содержащегося в данных карты, по меньшей мере одному объекту, сфотографированному камерой, содержит вычисление информации местоположения по меньшей мере одного сфотографированного объекта, вычисление информации местоположения по меньшей мере одного объекта отображения, содержащегося в данных карты, сравнение вычисленной информации местоположения по меньшей мере одного сфотографированного объекта с вычисленной информацией местоположения по меньшей мере одного объекта отображения и сопоставление по меньшей мере одного объекта отображения по меньшей мере одному сфотографированному объекту на основе соответствующей им информации местоположения.
Предпочтительно, информацию местоположения по меньшей мере одного сфотографированного объекта и по меньшей мере одного объекта отображения, содержащегося в данных карты, вычисляют на основе информации местоположения камеры. Предпочтительно, информация местоположения камеры содержит текущее местоположение камеры и полярный угол центральной оси камеры.
Согласно дополнительному аспекту изобретения вычисление информации местоположения по меньшей мере одного сфотографированного объекта содержит выделение контура по меньшей мере из сфотографированного объекта, установление точки вычисления информации местоположения по меньшей мере одного объекта из выделенного контура, вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры и вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения.
Предпочтительно, информация местоположения камеры дополнительно включает наклон камеры. Предпочтительно, вычисление информации местоположения по меньшей мере одного сфотографированного объекта дополнительно включает корректирование вычисленного расстояния от текущего местоположения камеры до точки вычисления информации местоположения.
Согласно еще одному аспекту изобретения вычисление информации местоположения по меньшей мере одного объекта отображения, содержащегося в данных карты, включает сопоставление информации местоположения камеры с данными карты, установление точки вычисления информации местоположения по меньшей мере одного объекта отображения и вычисление информации местоположения точки вычисления информации местоположения по меньшей мере одного объекта отображения на основе местоположения камеры, сопоставленной с данными карты.
Предпочтительно, информация местоположения камеры содержит текущее местоположение камеры и полярный угол центральной оси камеры. Предпочтительно, вычисление информации местоположения точки вычисления информации местоположения по меньшей мере одного объекта отображения включает вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения по меньшей мере одного объекта отображения и вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры.
Предпочтительно, сопоставление по меньшей мере одного объекта отображения с по меньшей мере одним сфотографированным объектом осуществляют, когда величина ошибки между информацией местоположения по меньшей мере одного сфотографированного объекта и информацией местоположения по меньшей мере одного объекта отображения находится в пределах предварительно определенной величины.
Согласно еще одному аспекту изобретения способ дополнительно включает считывание из текстовой информации данных карты по меньшей мере одного объекта отображения, сопоставленного по меньшей мере с одним сфотографированным объектом, вставку текстовой информации считывания в соответствующие местоположения в пределах по меньшей мере одного сфотографированного объекта и отображение по меньшей мере одного сфотографированного объекта, имеющего вставленную в него текстовую информацию считывания.
Предпочтительно, вставка текстовой информации считывания в соответствующие местоположения по меньшей мере в пределах одного сфотографированного объекта включает определение местоположения отображения текстовой информации в местоположении по меньшей мере одного сфотографированного объекта, сопоставленного по меньшей мере одному объекту отображения, и отображение текстовой информации по меньшей мере одного объекта отображения в определенном местоположении отображения.
Предпочтительно, отображение по меньшей мере одного сфотографированного объекта, имеющего вставленную в него текстовую информацию считывания, включает определение цвета отображения и отображение контура по меньшей мере одного сфотографированного объекта и текстовой информации определенным цветом отображения.
Предпочтительно, определение объекта наведения содержит определение, является ли объект, существующий по меньшей мере в одном сфотографированном объекте, доступным в качестве пункта назначения, определение объекта, существующего по меньшей мере в одном сфотографированном объекте, в качестве объекта наведения, если объект, существующий по меньшей мере в одном сфотографированном объекте, определен доступным в качестве пункта назначения, и выбор одного объекта, существующего на маршруте перемещения, по меньшей мере из одного сфотографированного объекта и определение выбранного объекта в качестве объекта наведения, если определено, что никакой объект не доступен в качестве пункта назначения.
Предпочтительно, отображение пиктограммы объекта наведения на экране портативного терминала включает отображение определенной пиктограммы объекта наведения в соответствии с тем, является ли объект, определенный в качестве объекта наведения пунктом назначения или нет.
Первая задача настоящего изобретения состоит в обеспечении способа сопоставления изображения, сфотографированного камерой, с данными карты в портативном терминале, при котором фотографируют объекты, такие как здания и т.п., камерой, размещенной на портативном терминале, и сопоставляют объектам в сфотографированных изображениях объекты отображения на данных карты.
Вторая задача состоит в обеспечении способа сопоставления изображения, сфотографированного камерой, с данными карты в портативном терминале, при котором отображают на экране текстовую информацию объектов отображения совместно со сфотографированными изображениями камеры, если объекты в сфотографированных изображениях сопоставляются с объектами отображения на данных карты.
Третья задача состоит в обеспечении способа наведения по маршруту перемещения с использованием изображения, сфотографированного камерой в портативном терминале, при котором сопоставляют объекты отображения на данных карты объектам в сфотографированных изображениях, и осуществляют направление по маршруту перемещения из текущего местоположения пользователя в пункт назначения с использованием сфотографированных изображений камеры.
Четвертая задача состоит в обеспечении способа наведения по маршруту перемещения c использованием изображения, сфотографированного камерой в портативном терминале, при котором отображают на экране текстовую информацию объектов отображения на данных карты, которые сопоставлены объектам сфотографированных изображений, совместно с изображениями, сфотографированными камерой, для наведения по маршруту перемещения, когда осуществляется направление пользователя по маршруту перемещения.
Распознавание информации местоположения камеры выполняют таким образом, что приемник GPS принимает навигационные сообщения и определяет местоположение, определенное посредством принятых навигационных сообщений, как текущее местоположение камеры, и полярный угол и наклон, обнаруженные датчиком, определяют полярный угол и наклон центральной оси, сфотографированные камерой.
Кроме того, на основе информации местоположения, распознанной камерой, вычисляют информацию местоположения по меньшей мере одного объекта, существующего в сфотографированных изображениях, и информацию местоположения объектов отображения, содержащихся в данных карты, и сопоставляют по меньшей мере один объект объекту отображения, имеющему идентичную информацию местоположения.
Вычисление информации местоположения по меньшей мере одного объекта осуществляют таким образом, что выделяют контур объекта из сфотографированных изображений для отделения по меньшей мере одного объекта и устанавливают центральную точку из отделенного объекта для вычисления информации местоположения. Затем используют полярный угол камеры для вычисления центральной точки для вычисления информации местоположения объекта и вычисляют расстояние от текущего местоположения камеры до центральной точки объекта.
Вычисление информации местоположения объектов отображения, содержащихся в данных карты, выполняют таким образом, что сопоставляют информацию местоположения камеры с данными карты для установки центральных точек объектов отображения. Затем используют местоположение и полярный угол камеры, сопоставленной с данными карты, для вычисления расстояния между камерой и соответствующими объектами отображения и полярных углов.
Сопоставление между по меньшей мере одним объектом и объектом отображения выполняют таким образом, что сравнивают информацию местоположения по меньшей мере одного объекта с соответствующей информацией местоположения объектов отображения, и в результате сравнения, если ошибка между двумя видами информации местоположения находится в пределах предварительно определенного диапазона, то объект отображения, имеющий ошибку в пределах предварительно определенного диапазона информации местоположения сопоставляют по меньшей мере одному объекту.
Кроме того, из данных карты считывают текстовую информацию объекта отображения, сопоставленного по меньшей мере одному объекту, и вставляют текстовую информацию считывания в местоположение соответствующего объекта, при этом объект отображения сопоставляют в изображениях, соответственно сфотографированных, и отображают информацию.
Вставку и отображение текстовой информации в сфотографированном изображении осуществляют таким образом, что определяют местоположение отображения текстовой информации местоположением объекта, сопоставленного с объектом отображения, и наносят текстовую информацию объекта отображения на определенное местоположение отображения. Затем определяют цвета отображения для отображения объекта и текстовой информации, и контур объекта и текстовую информацию отображают определенными цветами отображения.
В соответствии с третьей и четвертой задачами настоящего изобретения определяют отправной пункт и пункт назначения и осуществляют поиск маршрута перемещения из отправного пункта в пункт назначения посредством загрузки данных карты. Если пользователь перемещается по найденному маршруту перемещения, объекты фотографируют камерой, и по меньшей мере один объект в сфотографированных изображениях сопоставляют с объектом отображения, содержащимся в данных карты.
Кроме того, по меньшей мере один объект, сопоставленный с предварительно определенным объектом отображения, из числа объектов сфотографированных изображений определяют в качестве объекта наведения, и пиктограмму объекта наведения вставляют на местоположение определенного объекта наведения и отображают на экране для направления по маршруту перемещения из отправного пункта в пункт назначения.
Определение объекта наведения выполняют таким образом, что если в сфотографированных изображениях существует пункт назначения, то в качестве объекта наведения определяют пункт назначения. Например, если в качестве пункта назначения введено предварительно определенное здание, то распознают, доступно ли соответствующее здание на сфотографированных изображениях, и если соответствующее здание доступно, то в качестве объекта наведения определяют соответствующее здание. Если на сфотографированных изображениях не существует пункта назначения, то в качестве объекта наведения выбирают и определяют по меньшей мере один объект из числа объектов, сопоставленных объектам отображения, существующий на сфотографированных изображениях и расположенный на маршруте перемещения.
Должно быть понятно, что и предыдущее общее описание и последующее подробное описание настоящего изобретения являются иллюстративными и поясняющими и предназначены для обеспечения дополнительного пояснения изобретения, как оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приложенные чертежи, которые включены для обеспечения дополнительного понимания изобретения и составляют часть этого описания, иллюстрируют варианты осуществления изобретения и совместно с описанием служат для пояснения принципов изобретения. Признаки, элементы и аспекты изобретения, которые обозначены идентичными числами на различных чертежах, представляют одинаковые, эквивалентные или подобные признаки, элементы или аспекты в соответствии с одним или большим количеством вариантов осуществления.
Фиг.1 - блок-схема, иллюстрирующая конструкцию навигационной системы, согласно одному варианту осуществления настоящего изобретения.
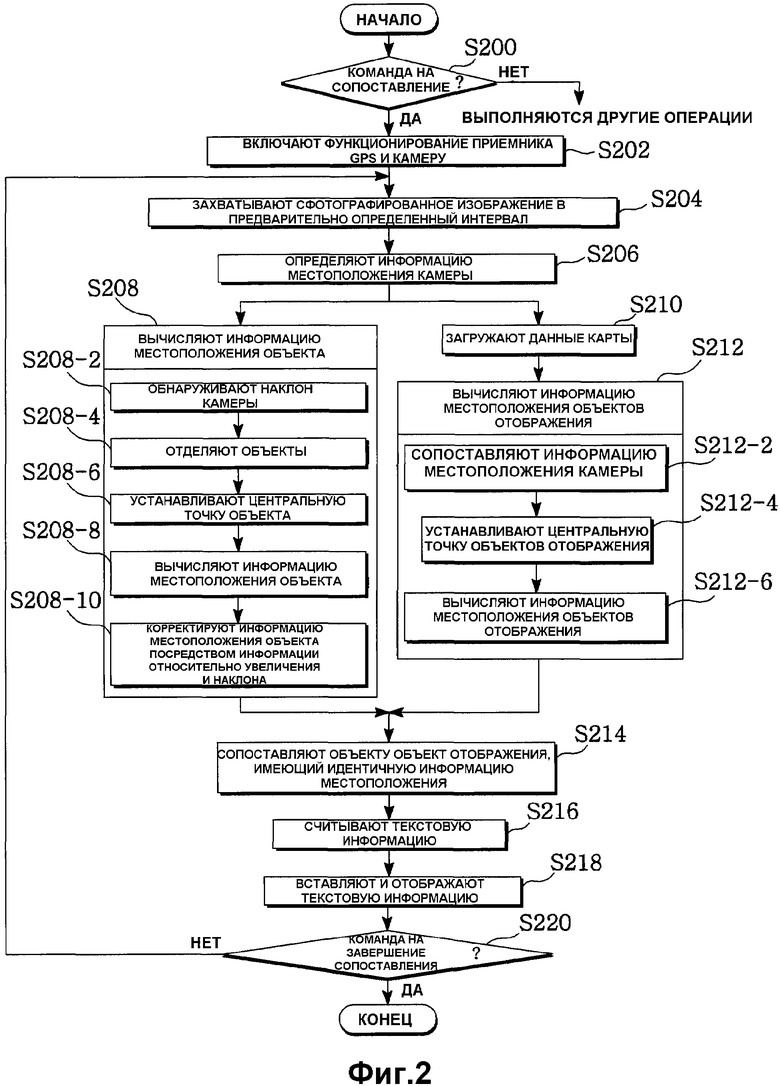
Фиг.2 - блок-схема сигналов, иллюстрирующая операцию отображения текстовой информации в местоположениях объектов, согласно одному варианту осуществления настоящего изобретения.
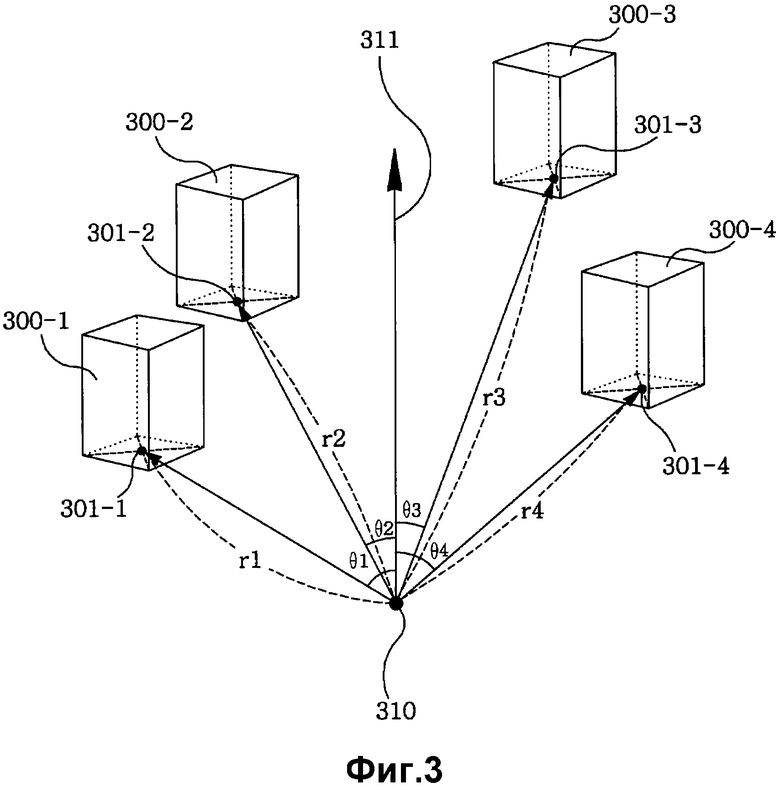
Фиг.3 - схематическая диаграмма, иллюстрирующая операцию вычисления информации местоположения объектов, согласно одному варианту осуществления настоящего изобретения.
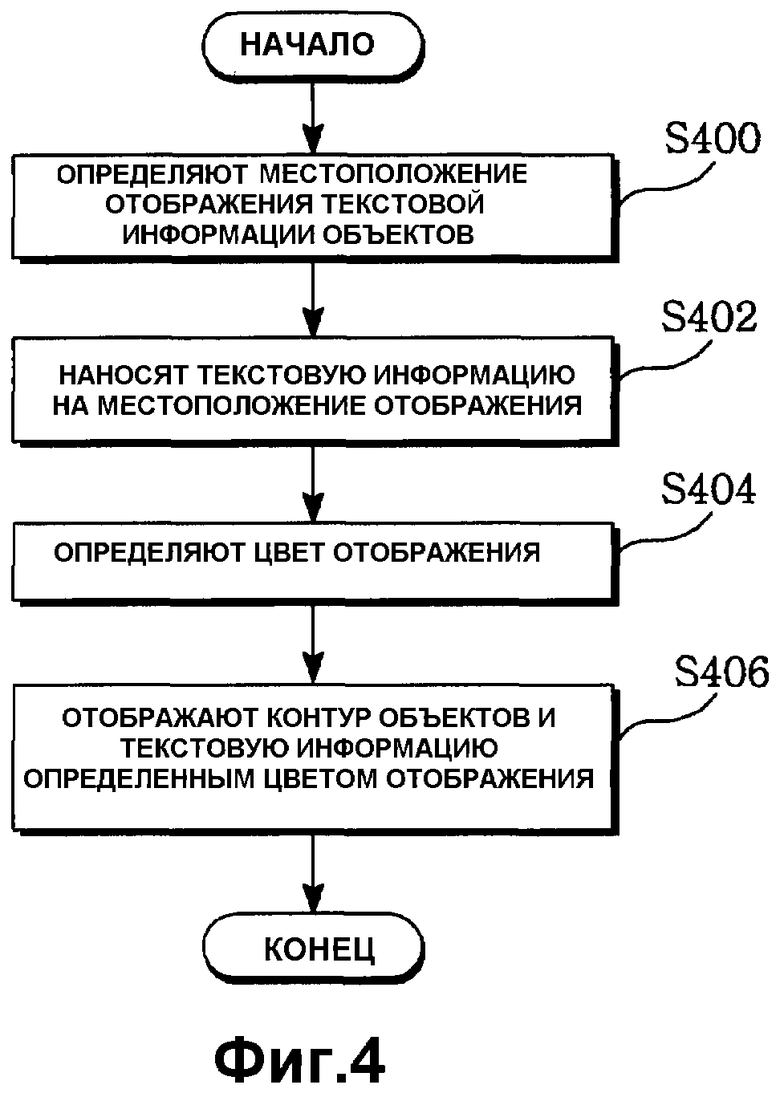
Фиг.4 - блок-схема сигналов, иллюстрирующая операцию отображения текстовой информации в местоположениях объектов, согласно одному варианту осуществления настоящего изобретения.
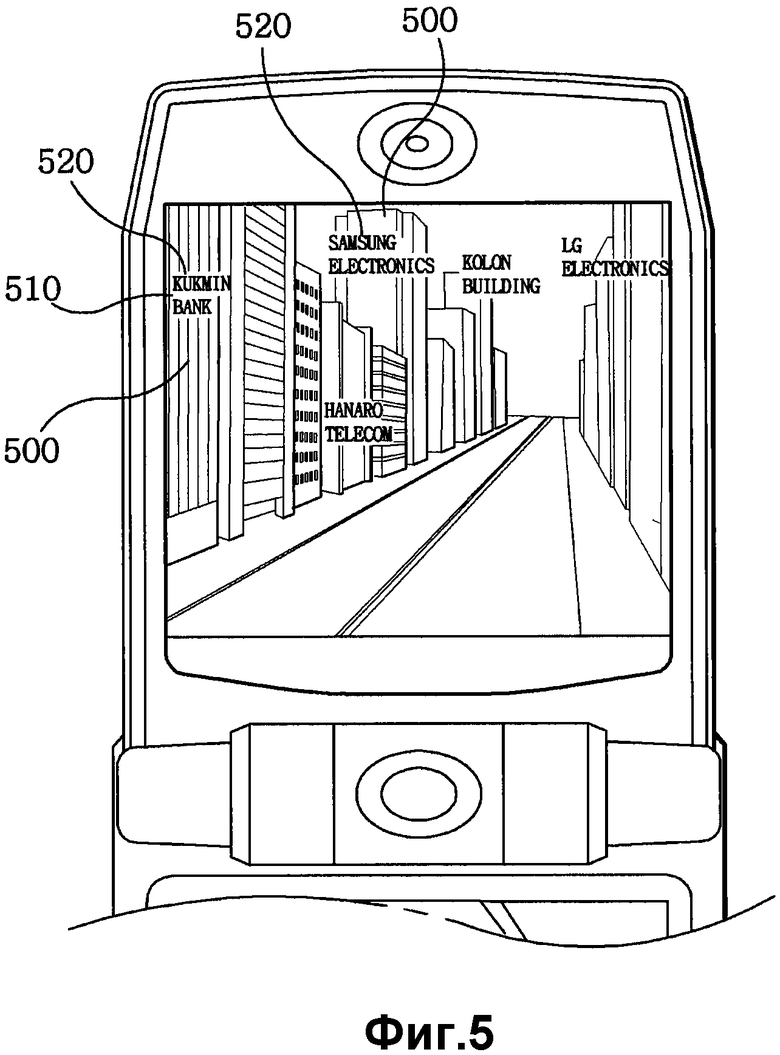
Фиг.5 - возможный вариант, иллюстрирующий случай, где отображают текстовую информацию для объектов, согласно одному варианту осуществления настоящего изобретения.
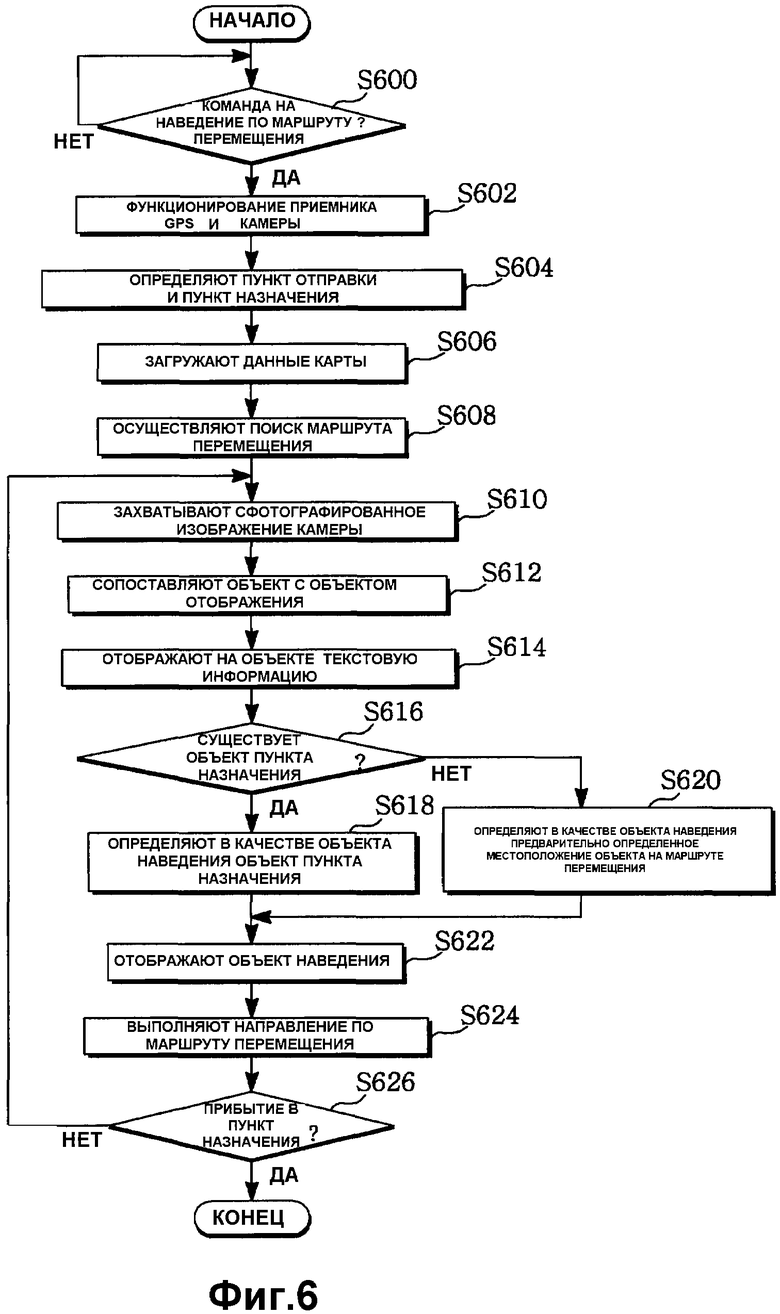
Фиг.6 - блок-схема сигналов, иллюстрирующая операцию наведения по маршруту перемещения, согласно одному варианту осуществления настоящего изобретения.
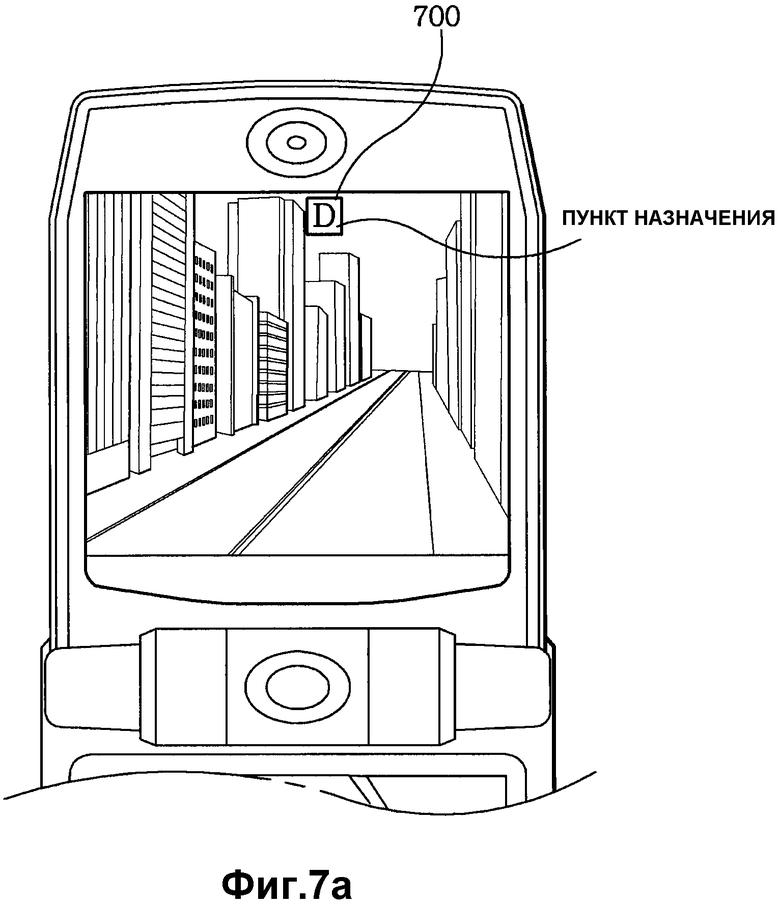
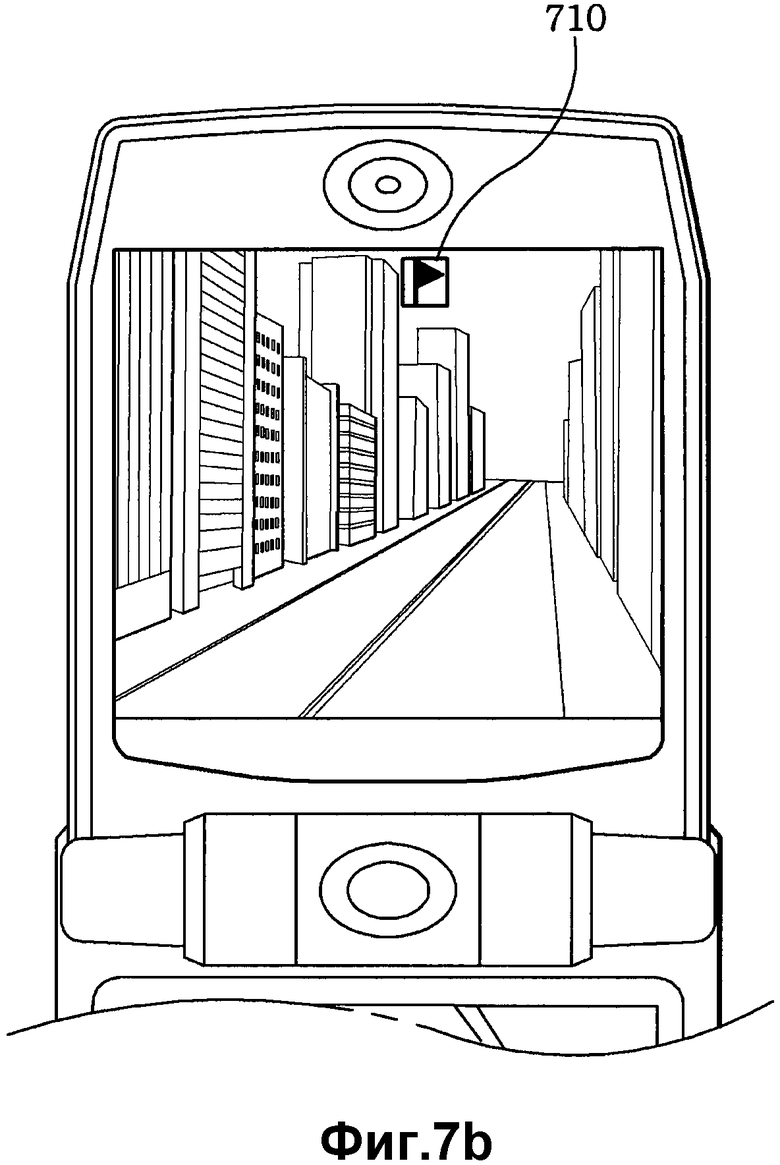
Фиг.7a и фиг.7b - возможные варианты, иллюстрирующие операции отображения пунктов объекта наведения на сфотографированных изображениях, согласно одному варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу сопоставления изображения, сфотографированного камерой, с данными карты в портативном терминале и к способу наведения по маршруту перемещения с использованием изображения, сфотографированного камерой, в портативном терминале. Настоящее изобретение будет пояснено со ссылкой на прилагаемые чертежи, иллюстрирующие предпочтительный вариант осуществления настоящего изобретения.
Фиг.1 - блок-схема, иллюстрирующая конструкцию навигационной системы, согласно одному варианту осуществления настоящего изобретения. Согласно фиг.1 ссылочная позиция 100 обозначает приемник GPS. Приемник 100 GPS принимает навигационные сообщения, периодически передаваемые несколькими спутниками GPS, и использует навигационные сообщения для извлечения координат местоположения.
Ссылочная позиция 102 обозначает камеру для фотографирования объектов, и ссылочная позиция 104 обозначает процессор обработки изображений. Процессор 104 обработки изображений захватывает изображения объектов, сфотографированных камерой 102, и выполняет обработку изображений на изображениях, такую как вставка текстовой информации в захваченные изображения и вставка индикатора объекта наведения.
Ссылочная позиция 106 представляет блок памяти для хранения данных карты, в котором предварительно сохранены данные карты. Данные карты в блоке 106 памяти для хранения данных карты хранятся с текстовой информацией, содержащей информацию местоположения различных объектов отображения, таких как здания, и текстовой информации, такой как названия зданий объектов отображения.
Ссылочная позиция 108 обозначает датчик. Датчик 108 размещен для обнаружения полярных углов и наклонов камеры 102 посредством датчика наклона для обнаружения наклонов и датчика полярного угла, такого как гироскоп.
Ссылочная позиция 110 обозначает блок ввода данных. Блок 110 ввода данных размещен посредством нескольких функциональных клавиш. Блок 110 ввода данных формирует соответствующую команду на операцию в ответ на избирательное манипулирование пользователем функциональными клавишами. То есть пользователь может манипулировать функциональными клавишами блока 110 ввода данных для ввода команды сопоставления объектов, команды наведения по маршруту перемещения, и отправного пункта и пункта назначения для наведения по маршруту перемещения.
Ссылочная позиция 112 определяет контроллер. Контроллер 112 управляет камерой 102 таким образом, что камера 102 может фотографировать предварительно определенные объекты. Контроллер 112 управляет процессором 104 обработки изображений таким образом, что процессор 104 обработки изображений захватывает изображения предварительно определенных объектов, сфотографированных камерой 102, и обрабатывает захваченные изображения. Контроллер 112 определяет текущее местоположение камеры 102 в ответ на выходной сигнал приемника 100 GPS и определяет полярные углы и наклоны объектов, сфотографированных камерой 102, в ответ на сигнал обнаружения датчика 108. Контроллер 112 использует полярные углы и наклоны объектов, сфотографированных камерой 102, для сопоставления объектов с объектами отображения в данных карты, которые хранятся в блоке 106 памяти для хранения данных карты. Контроллер 112 считывает из блока 106 памяти для хранения данных карты текстовую информацию объектов отображения, сопоставленных объектам, и осуществляет управление таким образом, что текстовую информацию считывания вставляют на местоположение соответствующего сопоставленного объекта в сфотографированных изображениях. Контроллер 112 также осуществляет поиск маршрута перемещения пользователя и осуществляет управление таким образом, что пользователь может быть направлен по найденному маршруту перемещения.
Ссылочная позиция 114 обозначает задающий блок отображения. Задающий блок 114 отображения в ответ на управление контроллера 112 отображает на блоке 116 отображения изображения объектов, сфотографированные камерой 102, и текстовую информацию.
Ссылочная позиция 118 обозначает блок формирования звукового сигнала. Блок 118 формирования звукового сигнала формирует звуковой сигнал для наведения по маршруту перемещения пользователя в ответ на управление контроллера 112 и выводит сформированный звуковой сигнал на динамик 120 для обеспечения возможности прослушивания звука пользователем.
В соответственно сконструированной навигационной системе, если объекты изображений, сфотографированных камерой 102, и объекты отображения данных карты, которые хранятся в блоке 106 памяти для хранения данных карты, сопоставлены, то контроллер 112 сначала оперирует приемником 100 GPS для приема навигационных сообщений и для обнаружения текущего местоположения и затем оперирует камерой 102 для фотографирования предварительно определенных объектов. Кроме того, если предварительно определенные объекты сфотографированы камерой 102, то контроллер 112 управляет процессором 104 изображений для захвата изображений, сфотографированных камерой 102.
Если процессор 104 обработки изображений захватывает изображения, сфотографированные камерой 102, то контроллер 112 распознает информацию местоположения камеры 102 посредством выходного сигнала приемника 100 GPS и сигнала обнаружения датчика 108. То есть контроллер 112 определяет текущее местоположение камеры 102 посредством выходного сигнала приемника 100 GPS и определяет полярный угол и наклон камеры 102 посредством сигнала обнаружения датчика 108.
Соответственно, непосредственно определенное текущее местоположение и полярный угол камеры 102 используют для вычисления соответствующей информации местоположения объектов из захваченных изображений. Вычисленную информацию местоположения корректируют на наклон камеры 102 для правильного вычисления соответствующей информации местоположения объектов.
Контроллер 112 считывает из блока 106 памяти для хранения данных карты данные карты предварительно определенной области, которая содержит текущее местоположение камеры 102 и сопоставляет текущее местоположение камеры 102 с данными карты считывания. Сопоставленное текущее местоположение и полярный угол камеры 102 используют для вычисления информации местоположения соответствующих объектов отображения, таких как здания, содержащихся в данных карты.
Контроллер 112 сравнивает информацию местоположения вычисленных объектов с информацией местоположения объектов отображения и в соответствии с результатом сравнения сопоставляет вычисленные объекты с объектами отображения. Если сопоставление между вычисленными объектами и объектами отображения завершено, то контроллер 112 считывает соответствующую текстовую информацию сопоставленных объектов отображения. Текстовую информацию считывания вставляют в местоположение соответствующего объекта захваченных изображений, захваченных процессором 104 обработки изображений в соответствии с управлением контроллера 112. Затем захваченные изображения, в которые вставлена текстовая информация, выводят на блок 116 отображения через задающий блок 114 отображения и делают их отображаемыми на экране.
Предпочтительно, местоположение вставки текстовой информации различается местоположением вставки соответствующей текстовой информации. Кроме того, предпочтительно, чтобы соответствующая текстовая информация была вставлена и отображалась в местоположениях так, чтобы они не перекрывались друг с другом.
Фиг.2 - блок-схема сигналов, иллюстрирующая операцию отображения текстовой информации в местоположениях объектов, согласно одному варианту осуществления настоящего изобретения. Согласно фиг.2, контроллер 112 распознает, была ли сформирована команда сопоставления для сопоставления объекта отображения, содержащегося в данных карты, по меньшей мере одному объекту в изображениях, сфотографированных камерой 102 (S200). Команда сопоставления может быть задана лично пользователем, манипулирующим блоком 110 ввода данных. Команда сопоставления может быть сформирована также при отображении информации объекта, когда пользователь манипулирует блоком 110 ввода данных или при наведении по маршруту перемещения.
Если команда сопоставления сформирована, то контроллер 112 оперирует приемником 100 GPS и камерой 102 (S202) и управляет процессором 104 обработки изображений для обеспечения возможности захвата изображений, сфотографированных камерой 102, в предварительно определенный интервал времени (S204).
Контроллер 112 определяет информацию местоположения камеры 102, которая сфотографировала объекты (S206). Предпочтительно, контроллер 112 распознает в качестве текущего местоположения камеры 102 текущее местоположение, вычисленное посредством навигационных сообщений, принятых приемником 100 GPS. Полярный угол центральной оси камеры 102 определяют полярным углом, обнаруженным датчиком азимута, таким как гироскоп, размещенным в датчике 108.
Если информация местоположения камеры 102 определена, то контроллер 112 вычисляет информацию местоположения по меньшей мере одного объекта из изображений, захваченных процессором 104 изображений (S208).
Вычисление по меньшей мере одного объекта (S208) выполняют таким образом, что сначала камерой 102, которая сфотографировала объекты, определяют наклон посредством сигнала обнаружения датчика 108 (S208-2). То есть датчик 108 снабжен датчиком наклона для обнаружения наклона камеры 102. Соответственно, контроллер 112 определяет наклон камеры 102 наклоном, обнаруженным датчиком наклона датчика 108.
Если наклон камеры 102 определен, то контроллер 112 управляет процессором 104 обработки изображений для отделения по меньшей мере одного объекта их захваченных изображений (S208-4). Предпочтительно, процессор 104 обработки изображений выделяет контуры соответствующих объектов из захваченных изображений и отделяет по меньшей мере один объект с использованием выделенных контуров. Затем контроллер 112 устанавливает центральную точку для выделения координаты местоположения по меньшей мере из одного соответственно отделенному объекту (S208-6). Если центральная точка объекта установлена, то контроллер 112 вычисляет информацию местоположения соответствующего объекта на основе текущего местоположения и полярного угла камеры 102 (S208-8).
Например, если из изображений, сфотографированных камерой 102, были выделены четыре объекта (с 300-1 по 300-4), как показано фиг.3, то в качестве центральных точек для извлечения информации местоположения соответствующих объектов устанавливают нижние центральные точки соответствующих объектов (с 300-1 по 300-4). Кроме того, приемник 100 GPS вычисляет полярные углы θ1, θ2, θ3 и θ4, которые являются информацией местоположения относительно центральных точек (с 301-1 по 301-4) четырех объектов (300-1˜300-4). Приемник 100 GPS также вычисляет расстояния r1, r2, r3 и r4 на основе полярного угла 311 центральной оси камеры 102, распознанного посредством сигнала обнаружения датчика 108.
Расстояния r1, r2, r3 и r4 от текущего местоположения 310 камеры 102 до центральных точек (с 301-1 по 301-4) четырех объектов (с 300-1 по 300-4) варьируются в зависимости от наклона камеры 102 и информации увеличения. Вследствие этого расстояния r1, r2, r3 и r4 от текущего местоположения 310 камеры 102 до центральных точек (с 301-1 по 301-4) четырех объектов (с 300-1 по 300-4) корректируют на наклон камеры 102, обнаруженный датчиком 108, и на информацию увеличения, при котором объекты были сфотографированы камерой 102 (S208-10 фиг.2). В результате могут быть точно вычислены горизонтальные расстояния от текущего местоположения 310 камеры 102 до центральных точек (с 301-1 по 301-4) четырех объектов (с 300-1 по 300-4).
Тем временем, согласно фиг.2, одновременно с вычислением информации местоположения по меньшей мере одного объекта, контроллер 112 загружает данные карты, которые хранятся в блоке 106 памяти для хранения данных карты. Предпочтительно, на основе обнаруженного текущего местоположения камеры 102, контроллер 112 загружает из блока 106 памяти для хранения данных карты данные карты предварительно определенной области (S210). Затем контроллер 112 на основе текущего местоположения камеры 102 вычисляет по загруженным данным карты информацию местоположения нескольких объектов отображения, таких как соответствующие здания (S212).
Предпочтительно, вычисление (S212) информации местоположения относительно нескольких объектов отображения включает сопоставление текущего местоположения камеры 102 с данными карты (S212-2), установку центральных точек каждого объекта отображения (S212-4), вычисление расстояний от определенного текущего местоположения камеры 102 до центральных точек каждого объекта отображения и вычисление полярных углов центральных точек каждого объекта отображения на основе определенного полярного угла камеры 102 (S212-6).
Если информация местоположения объектов в захваченных изображениях и информация местоположения объектов отображения в данных карты вычислена, то контроллер 112 сравнивает вычисленную информацию местоположения по меньшей мере одного объекта с информацией местоположения объектов отображения. Последовательно, соответствующий объект отображения сопоставляют по меньшей мере с одним объектом, имеющим соответствующую информацию местоположения (S214).
Дополнительно, предпочтительно осуществлять распознавание, что величина ошибки устанавливается заранее, осуществляется сравнение информации местоположения по меньшей мере одного объекта и информации местоположения объектов отображения, содержащихся в данных карты, и объект отображения в пределах предварительно установленной величины ошибки сопоставляется по меньшей мере с одним объектом.
После сопоставления по меньшей мере одного объекта в пределах сфотографированных изображений и объекта отображения в данных карты контроллер 112 считывает из блока 106 памяти для хранения данных карты текстовую информацию объекта отображения, сопоставленного по меньшей мере с одним объектом (S216). Затем контроллер 112 вставляет текстовую информацию считывания в захваченное изображение и отображает ее на экране (S218). Предпочтительно, текстовую информацию считывания объектов отображения соответственно вставляют в местоположения соответствующих сопоставленных объектов и выводят на задающий блок 114 отображения для отображения на экране блока 116 отображения.
При вставке текстовой информации в местоположение по меньшей мере одного объекта, сопоставленного с объектом отображения, и отображении ее на экране контроллер 112 сначала определяет местоположение отображения, где вставляют текстовую информацию по меньшей мере в один объект, сопоставленный с объектом отображения (S400), согласно фиг.4. Местоположение отображения может быть определено в верхней позиции, промежуточной позиции или нижней позиции объекта, где не перекрывается текстовая информация. Когда определено местоположение отображения текстовой информации, контроллер 112 осуществляет нанесение текстовой информации на соответствующее местоположение отображения (S402).
Для точной проверки пользователем текстовой информации по меньшей мере одного объекта в настоящем изобретении определяют по меньшей мере один объект, сопоставленный с объектом отображения, и цвет отображения текстовой информации (S404), и контур соответствующего объекта и текстовую информацию отображают с использованием определенного цвета (S406).
Например, как показано на фиг.5, камера 102 выполнена с возможностью захвата сфотографированного изображения, и объекты 500 в пределах захваченного изображения представлены сопоставленными с объектами отображения в данных карты. Определены местоположения 510 отображения для отображения текстовой информации объектов, и текстовая информация 520 вставлена в определенные местоположения 510 отображения и отображена. Предпочтительно, контур объектов 500 и текстовая информация отображены одним цветом.
После отображенной вставки текстовой информации в местоположения объектов в соответственно захваченном изображении контроллер 112 распознает, была ли сформирована соответствующая команда на завершение сопоставления для объектов (S220 фиг.2). Команда на завершение сопоставления может быть сформирована при манипуляции пользователем блоком 110 ввода данных. Соответствующая команда на завершение сопоставления для объектов может быть также сформирована, когда завершено направление пользователя по маршруту перемещения.
Согласно фиг.2, если команда на завершение сопоставления для объектов не сформирована, то контроллер 112 возвращается к этапу S204 для захвата изображений, сфотографированных камерой 102. Соответственно, сопоставляют объекты в пределах захваченных изображений и объекты отображения в данных карты и повторно выполняют операцию отображения текстовой информации. Если соответствующая команда на завершение сопоставления сформирована, то контроллер 112 завершает операцию отображения текстовой информации.
Тем временем, если осуществляют наведение пользователя по маршруту перемещения, то контроллер 112 сначала через блок 110 ввода данных принимает отправной пункт и пункт назначения для направления по маршруту перемещения. Если введены отправной пункт и пункт назначения для наведения по маршруту перемещения, то контроллер 112 загружает данные карты, которые хранятся в памяти 106 данных карты, и использует загруженные данные карты для поиска маршрута перемещения из отправного пункта в пункт назначения.
Если маршрут перемещения найден, то контроллер 112 через процессор 104 обработки изображений захватывает изображения, сфотографированные камерой 102, для сопоставления с объектами в изображениях объектов отображения, содержащихся в данных карты. Кроме того, контроллер 112 отображает захваченные изображения на экране блока 116 отображения для использования сопоставленной информации между объектами и объектами отображения и для наведения по маршруту перемещения для пользователя.
Согласно фиг.6 контроллер 112 распознает, введена ли из блока 110 ввода данных команда на наведение по маршруту перемещения (S600). Если команда на наведение по маршруту перемещения введена, то контроллер 112 включает приемник 100 GPS и камеру 102 для нормального функционирования (S602). Затем контроллер 112 определяет отправной пункт и пункт назначения для наведения по маршруту перемещения (S604).
Предпочтительно, если через блок 110 ввода данных введено текущее местоположение, то в качестве отправного пункта маршрута перемещения определяют местоположение, распознанное приемником 100 GPS, который принял навигационные сообщения. Если пользователь дает команду на наведение по маршруту перемещения, то контроллер 112 загружает данные карты, которые хранятся в блоке 106 памяти для хранения данных карты для отображения данных карты на экране блока 116 отображения, и пользователь может лично ввести отправной пункт и пункт назначения посредством карты, отображенной на блоке 116 отображения.
Если отправной пункт и пункт назначения определены, то контроллер 112 извлекает карту из блока 106 памяти для хранения данных карты (S606) и с использованием извлеченных данных карты осуществляет поиск оптимального маршрута перемещения из отправного пункта в пункт назначения (S608). Предпочтительно, операцией поиска маршрута перемещения является одна из различных известных операций поиска.
Если поиск маршрута перемещения завершен, то контроллер 112 управляет процессором 104 обработки изображений для захвата изображений, сфотографированных камерой 102, в предварительно определенный интервал времени (S610) и сопоставляет объекты в захваченных изображениях с объектами отображения, содержащимися в данных карты (S612). Затем из данных карты из блока 106 памяти для хранения данных карты считывают текстовую информацию объектов отображения, сопоставленных с объектами, и текстовую информацию считывания вставляют в захваченные изображения и отображают (S614).
Предпочтительно, операция сопоставления между объектами в захваченных изображениях и объектами отображения, содержащимися в данных карты, и отображение текстовой информации являются идентичными, иллюстрируемыми фиг.3. После сопоставления между объектами и объектами отображения и отображения текстовой информации контроллер 112 распознает, является ли доступным в захваченном изображении объект, содержащий пункт назначения (S616).
Если объект, содержащий пункт назначения, является доступным в захваченном изображении, то контроллер 112 определяет в качестве объекта наведения объект, содержащий пункт назначения, в захваченном изображении (S618). Если объект, содержащий пункт назначения, отсутствует в захваченном изображении, то контроллер 112 определяет в качестве объекта наведения предварительно определенный объект, существующий на маршруте перемещения (S620).
Когда определен объект наведения, контроллер 112 вставляет индикатор объекта наведения в местоположение объекта, соответствующего объекту наведения в захваченном изображении, и изображение, в котором вставлен индикатор объекта наведения, посредством задающего блока 114 отображения отображают на блоке 116 отображения для проверки пользователем (S622).
Кроме того, контроллер 112 использует изображение, отображенное на блоке отображения 116, и текстовую информацию для наведения по маршруту перемещения пользователя (S624). Контроллер 112 управляет блоком 118 формирования звукового сигнала для формирования звукового направляющего сигнала и выводит сформированный звуковой сигнал на динамик 120 так, чтобы наведение пользователя по маршруту перемещения могло осуществляться посредством звукового сигнала, если выполнено изменение наведения маршрута перемещения или регулирование объекта наведения. При этом условии контроллер 112 распознает, было ли завершено наведение по маршруту перемещения в пункт назначения (S626).
В результате распознавания, если наведение по маршруту перемещения в пункт назначения не было завершено, то контроллер 112 захватывает изображение, сфотографированное камерой 102, и сопоставляет объектам в захваченном изображении объект отображения данных карты для установки объекта наведения. Затем повторно выполняют операцию вставки и отображения пиктограмм объекта наведения. Предпочтительно, пиктограммы объекта наведения отображают различным образом для обеспечения возможности проверки пользователем, является ли объект, определенный в качестве объекта наведения, пунктом назначения.
Предпочтительно, если объект, определенный в качестве объекта наведения, является пунктом назначения, то для него отображают индикатор 700 объекта наведения, как показано на фиг.7a. Предпочтительно, если в качестве объекта наведения определен предварительно определенный объект, существующий на маршруте перемещения, то для него отображают другой индикатор 710 объекта наведения, как показано на фиг.7b.
Вышеупомянутое описание определенных вариантов осуществления настоящего изобретения были представлены в целях иллюстрации и описания. Не подразумевается, что они являются исчерпывающими, или что изобретение ограничено определенными раскрытыми видами, и является очевидным, что в свете вышеизложенных принципов возможны многие модификации и изменения. Варианты осуществления были выбраны и описаны для наилучшего пояснения принципов изобретения и его практического применения, следовательно, для обеспечения возможности использования наилучшим образом другими специалистами в данной области техники изобретения и различных вариантов осуществления с различными модификациями, соответствующими определенному предполагаемому использованию. Подразумевается, что объем изобретения определен приложенной формулой изобретения и ее эквивалентами.
Группа изобретений относится к области транспортной навигации. Информацию местоположения объектов изображений, сфотографированных камерой, и информацию местоположения объектов отображения, таких как здание, содержащихся в данных карты, вычисляют на основе информации местоположения камеры. Вычисленную информацию местоположения используют для сопоставления объектов с объектами отображения. Изображение, сфотографированное камерой, отображают на экране. Из данных карты считывают текстовую информацию объектов отображения, сопоставленных с объектами, и отображают на местоположениях объектов, отображенных на экране. При перемещении пользователя осуществляют направление по маршруту перемещения с использованием информации сопоставления объектов с объектами отображения так, чтобы с использованием маршрута перемещения можно было направлять пользователя при личной проверке объектов, таких как здание. Группа изобретений обеспечивает выполнение задач навигации с повышенной точностью. 2 н. и 30 з.п. ф-лы, 7 ил.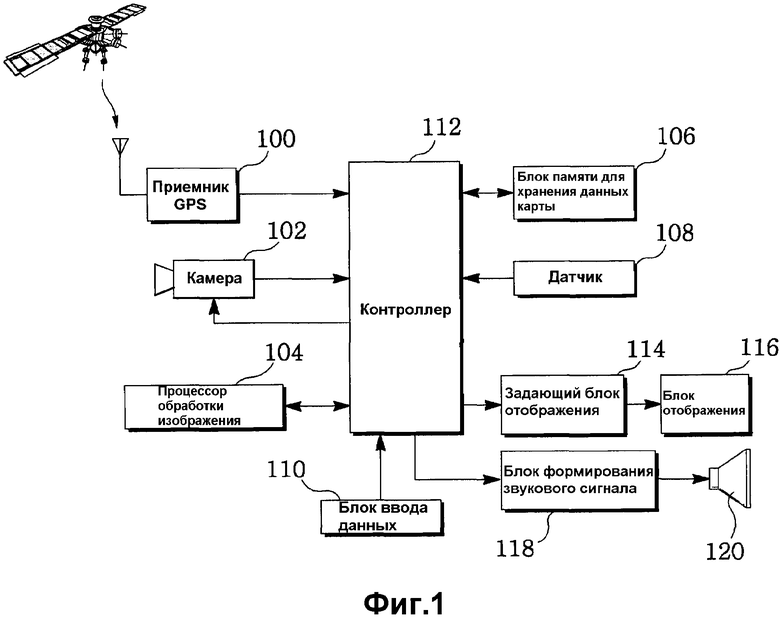
определение информации местоположения камеры, фотографирующей по меньшей мере один объект,
вычисление информации местоположения по меньшей мере одного сфотографированного объекта,
вычисление информации местоположения по меньшей мере одного объекта отображения, содержащегося в данных карты, на основе текущего местоположения камеры,
сравнение информации местоположения по меньшей мере одного сфотографированного объекта с информацией местоположения по меньшей мере одного объекта отображения и
сопоставление по меньшей мере одного объекта отображения с по меньшей мере одним сфотографированным объектом на основе соответствующей им информации местоположения.
определение текущего местоположения камеры в соответствии с сообщениями GPS, принятыми приемником GPS, размещенным на портативном терминале,
определение полярного угла центральной оси камеры с использованием датчика азимута, размещенного на портативном терминале, и
определение наклона камеры с использованием датчика наклона, размещенного на портативном терминале.
выделение контура по меньшей мере из сфотографированного объекта,
установление точки вычисления информации местоположения по меньшей мере одного объекта из выделенного контура,
вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры и
вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения.
сопоставление информации местоположения камеры с данными карты,
установление точки вычисления информации местоположения по меньшей мере одного объекта отображения и
вычисление информации местоположения точки вычисления информации местоположения по меньшей мере одного объекта отображения на основе местоположения камеры, сопоставленного с данными карты.
вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения по меньшей мере одного объекта отображения и
вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры.
считывание из данных карты текстовой информации по меньшей мере одного объекта отображения, сопоставленного с по меньшей мере одним сфотографированным объектом,
вставку текстовой информации считывания в соответствующие местоположения в пределах по меньшей мере одного сфотографированного объекта и
отображение по меньшей мере одного сфотографированного объекта, имеющего вставленную в него текстовую информацию считывания.
определение местоположения отображения текстовой информации в местоположении по меньшей мере одного сфотографированного объекта, сопоставленного с по меньшей мере одним объектом отображения, и
нанесение текстовой информации по меньшей мере одного объекта отображения в определенном месте отображения.
определение цвета отображения и
отображение контура по меньшей мере одного сфотографированного объекта и текстовой информации определенным цветом отображения.
поиск маршрута перемещения из отправного пункта в пункт назначения с использованием данных карты, которые хранятся в портативном терминале,
определение информации местоположения камеры, размещенной на портативном терминале,
сопоставление по меньшей мере одного объекта отображения, содержащегося в данных карты, с по меньшей мере одним объектом, сфотографированным камерой,
определение объекта наведения по меньшей мере в одном объекте, сфотографированном камерой,
вставку пиктограммы объекта наведения в местоположение объекта наведения, определенного по меньшей мере на одном сфотографированном объекте,
отображение пиктограммы объекта наведения на экране портативного терминала и
наведение по маршруту перемещения.
определение текущего местоположения камеры в соответствии с сообщениями GPS, принятыми приемником GPS, размещенным на портативном терминале,
определение полярного угла центральной оси камеры с использованием датчика азимута, размещенного на портативном терминале, и
определение наклона камеры с использованием датчика наклона, размещенного на портативном терминале.
вычисление информации местоположения по меньшей мере одного сфотографированного объекта,
вычисление информации местоположения по меньшей мере одного объекта отображения, содержащегося в данных карты,
сравнение вычисленной информации местоположения по меньшей мере одного сфотографированного объекта с вычисленной информацией местоположения по меньшей мере одного объекта отображения и
сопоставление по меньшей мере одного объекта отображения с по меньшей мере одним сфотографированным объектом на основе соответствующей им информации местоположения.
выделение контура по меньшей мере из сфотографированного объекта,
установление точки вычисления информации местоположения по меньшей мере одного объекта из выделенного контура,
вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры и
вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения.
сопоставление информации местоположения камеры с данными карты, установление точки вычисления информации местоположения по меньшей мере одного объекта отображения и
вычисление информации местоположения точки вычисления информации местоположения по меньшей мере одного объекта отображения на основе местоположения камеры, сопоставленной с данными карты.
вычисление расстояния от текущего местоположения камеры до точки вычисления информации местоположения по меньшей мере одного объекта отображения и
вычисление полярного угла точки вычисления информации местоположения на основе полярного угла центральной оси камеры.
считывание из данных карты текстовой информации по меньшей мере одного объекта отображения, сопоставленного с по меньшей мере одним сфотографированным объектом,
вставку текстовой информации считывания в соответствующие местоположения в пределах по меньшей мере одного сфотографированного объекта и
отображение по меньшей мере одного сфотографированного объекта, имеющего вставленную в него текстовую информацию считывания.
определение местоположения отображения текстовой информации в местоположении по меньшей мере одного сфотографированного объекта, сопоставленного с по меньшей мере одним объектом отображения, и
отображение текстовой информации по меньшей мере одного объекта отображения в определенном местоположении отображения.
определение цвета отображения и
отображение контура по меньшей мере одного сфотографированного объекта и текстовой информации определенным цветом отображения.
определение, является ли доступным объект, существующий по меньшей мере в одном сфотографированном объекте, в качестве пункта назначения, и
определение объекта, существующего по меньшей мере в одном сфотографированном объекте, в качестве объекта наведения, если объект, существующий по меньшей мере в одном сфотографированном объекте, определен доступным в качестве пункта назначения, и
выбор одного объекта, существующего на маршруте перемещения, из числа по меньшей мере одного сфотографированного объекта и определение выбранного объекта в качестве объекта наведения, если ни один объект не был определен доступным в качестве пункта назначения.
Приоритет по пунктам:
| KR 20050013000 A, 02.05.2005 | |||
| JP 2004304733 A, 28.10.2004 | |||
| JP 2002283912 A, 03.10.2002 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 1999 |
|
RU2153194C1 |

