ОБЛАСТЬ ТЕХНИКИ
[1] Настоящая технология относится в общем случае к области определения наличия
парковки, и, в частности, к системам и способам определения наличия индивидуальных парковочных мест с помощью вероятностного анализа заранее определенных парковок.
УРОВЕНЬ ТЕХНИКИ
[2] Множество доступных пользователю электронных устройств обеспечивает геолокацию, а также предоставляет информацию о маршруте. Некоторые из этих устройств специализируется исключительно на обеспечении геолокации и предоставлении информации о маршруте. Примером такого устройства может быть портативный GPS-навигатор, предоставляемый, например, компанией TomTom Corporation, Амстердам, Нидерланды. Другим примером такого устройства будет GPS-навигатор, встроенный в автомобиль. Например, многие производители автомобилей предоставляют возможность включения встроенной навигационной системы в свои машины. Другие электронные устройства предоставляют геолокацию и информацию о маршруте как дополнение к другим функциям. Например, большинство современных смартфонов, доступных на рынке, включает приложение, которое предоставляет сервисы геолокации и информации о маршруте.
[3] Некоторые сервисы геолокации и информации о маршруте представляют информацию об известных парковках и гаражах, и/или обозначают уличные парковки, на которых есть ограничение по времени или по типу использования (например, стоянка запрещена, только для коммерческих транспортных средств, с 8 утра до 5 вечера). Тем не менее, водители, которые приезжают на эти точки, часто обнаруживают, что парковочные места заняты или закрыты, поскольку подобные сервисы не могут указать водителю на то, где конкретно находятся доступные парковочные места.
[4] Некоторые подходы к отображению того, какие парковочные места становятся свободны, включают в себя специальные датчики для парковочных мест, которые определяют, заняты ли эти места или свободны. Далее эти данные могут поступать в центральное контрольное устройство, и это контрольное устройство может контролировать систему управления парковкой таким образом, чтобы для нового прибывающего на парковку транспортного средства, быстро нашлось свободное парковочное место. Тем не менее, этот подход является финансово-затратным, поскольку требует установки аппаратных устройств на каждой парковке, которая находится в ведении системы управления парковой.
[5] Другим подходом является обеспечение автомобилей датчиками, которые способны распознать то, когда парковочное место потенциально становится свободным. Например, автомобиль может обладать оптическим датчиком изображения, который проверяет, в то время как автомобиль перемещается вдоль ряда автомобилей, включены ли фары у какого-либо автомобиля в этом ряду, или термическим датчиком для определения того, теплый (работающий) или холодный двигатель у каждого автомобиля в ряду автомобилей и т.д. Тем не менее, этот подход ограничен в своем использовании и применяется только к тем парковочным местам, которые находятся рядом с автомобилем (т.е. в пределах диапазона действия датчиков), и он не подходит для поиска свободных парковочных площадок даже в соседнем квартале, не говоря уже о потенциальном поиске в области будущего пункта назначения.
[6] Другие подходы включают в себя приложения для смартфонов, которые передают данных о парковочных местах на центральный сервер, такие как ParkMe™ или Google® Open Spot. Подобные подходы требуют того, чтобы пользователь, который покидает свое парковочное место, явно сообщил через приложение на смартфоне о том, что парковочное место будет свободно. Это требование явных пользовательских действий увеличивает неточности, связанные с пользовательским опытом (например, пользователь может забыть или отвлечься), и снижает вероятность поступления сообщений о значительном количестве парковочных мест. Кроме того, подобные системы могут быть обладать неточными данными о местоположении в зависимости от времени предоставления отчета (т.е. пользователь может сообщать о своем местоположении значительно позже, чем он покидает фактическое парковочное место) или из-за помех в GPS-сигнале. С учетом того, что парковочное место обычно обладает размером примерно 2,5 на 5 метров, данные о парковке, которые отличаются на 10-20 метров, могут относиться к другой стороне дороги с двухсторонним движением, к другому кварталу или даже к соседнему гаражному комплексу.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[7] Таким образом, система и способ представлены здесь для определения наличия парковки, состоящей из индивидуальных парковочных мест с помощью вероятностного анализа заранее определенных парковок. Аспекты настоящей технологии предлагают способ определения того, покинул ли пользователь навигационного приложения или сервиса (или, проще, водитель, который использует устройство) парковочное место, и, следовательно, является ли парковочное место свободным. Кроме того, описанные способы предоставляют другим пользователям навигационного сервиса указание на потенциально доступное парковочное место на недавно освободившемся месте. Конкретнее, описанные способы относятся к вычислению вероятности того, что конкретный пользователь покинет конкретное парковочное место из множества парковочных мест, находящихся возле местоположения пользователя. Этот описанный способ далее относится к той проблеме, что может быть известно только примерное или приблизительное местоположение пользователя, что вероятно в том случае, когда пользователь активирует свое навигационное приложение только после того как он покинет свое парковочное место, или в том случае, если возникают проблемы с обнаружением местоположения с помощью GPS. Другие подходы используют агрегированные статистические данные для определения вероятности наличия парковки в районе из-за помех в GPS-данных и сложности при определении конкретного свободного парковочного места. В отличие от них, аспекты настоящей технологии могут связывать первоначально определенное местоположение пользователя с конкретной парковочной площадкой из множества парковочных площадок в пределах границ.
[8] Одним аспектом настоящей технологии является исполняемый на компьютере способ управления наличием парковки. Способ включает в себя получение от устройства указания на изменение в характере перемещения, связанное с первым пользователем. Указание на изменение в характере перемещения указывает на изменение с первого характера перемещения на второй характер перемещения в первом местоположении. Способ далее включает в себя идентификацию, с помощью записей о парковочных местах, хранящихся в базе данных, доступного парковочного места на основе полученного указания на изменение в характере перемещения, определение одного или нескольких пользователей навигации, пункт назначения которых находится поблизости от доступного парковочного места, вычисление, для каждого пользователя навигации, вероятности наличия парковки в отношении того, что соответствующий пользователь навигации займет доступное парковочное место, и передачу, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки.
[9] В другом аспекте настоящей технологии, идентификация первого парковочного места, которое стало доступным, на основе полученного указания на изменение в характере перемещения, далее включает в себя идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства, вычисление набора вторых вероятностей, связанных с парковочными местами, каждая вероятность из набора вторых вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате, и идентификацию доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вторых вероятностей.
[10] В соответствии с любым их вышеупомянутых аспектов, вычисление набора вторых вероятностей, связанных с парковочными местами-кандидатами, основано по меньшей мере на одном из наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
[11] В соответствии с любым из вышеупомянутых аспектов, способ далее включает в себя вычисление суммарной вероятности на основе по меньшей мере одной из набора вторых вероятностей, связанных с первой парковочной площадкой, и по меньшей мере одной из набора вероятностей наличия парковки, связанных с пользователем навигации, причем суммарная вероятность представляет собой вероятность того, что первое парковочное место доступно и что пользователь навигации займет первое парковочное место.
[12] В соответствии с любым из вышеупомянутых аспектов, передача, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, далее включает в себя: выбор подмножества пользователей навигации, обладающих соответствующими вероятностями наличия парковки в отношении использования доступного парковочного места, которые превышают первое пороговое значение; и передачу уведомления выбранному подмножеству.
[13] В соответствии с любым из вышеупомянутых аспектов, передача, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, далее включает в себя ранжирование пользователей навигации в соответствии с соответствующими вероятностями наличия парковки в отношении использования доступного парковочного места; и передачу уведомления подмножеству ранжированных пользователей навигации.
[14] Другим примерным аспектом настоящей технологии является исполняемый на компьютере способ определения наличия парковки. Способ включает в себя получение от устройства указания на изменение в характере перемещения, связанное с пользователем устройства. Указание на изменение в характере перемещения указывает на изменение с первого характера перемещения пользователя на второй характер перемещения пользователя в местоположении. Способ далее включает в себя идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства, и вычисление набора вероятностей, связанных с парковочными местами, каждая вероятность из набора вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате. Способ далее включает в себя определение доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вероятностей, и передачу уведомления о доступном парковочном месте на другие устройства.
[15] В соответствии с вышеупомянутыми аспектами, идентификация одного или нескольких парковочных мест-кандидатов включает в себя определение области карты, связанной с местоположением изменения в характере перемещения, и идентификацию парковочных мест-кандидатов, находящихся в этой области карты.
[16] В соответствии с любым из вышеупомянутых аспектов, изменение в характере перемещения определяется на основе шаблона характера из множества заранее определенных шаблонов характера.
[17] В соответствии с любым из вышеупомянутых аспектов, изменение в характере перемещения указывает на изменение с первого характера перемещения - ходьбы пешком -на второй характер перемещения - вождение.
[18] В соответствии с любым из вышеупомянутых аспектов, способ далее включает в себя определение местоположения изменения в характере перемещения как находящегося в пределах заранее определенной области по меньшей мере одного местоположения, связанного с устройством, и в ответ на определение того, что местоположение находится за пределами заранее определенной области, настройку местоположения изменения в характере перемещения с помощью по меньшей мере одного предыдущего местоположения, связанного с устройством.
[19] В соответствии с любым их вышеупомянутых аспектов, вычисление набора вероятностей, связанных с парковочными местами-кандидатами, основано по меньшей мере на одном из наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее-зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
[20] В соответствии с любым их вышеупомянутых аспектов, передача уведомления о наличия парковочного места другим устройствам включает в себя идентификацию набора других устройств, маршруты которых обладают пунктом назначения, находящимся поблизости от местоположения доступного парковочного места, и передачу уведомления идентифицированным другим устройствам.
[21] Другим аспектом настоящей технологии является система, включающая в себя аппаратный процессор, выполненный с возможностью осуществлять любые описанные здесь способы.
[22] Другим аспектом настоящей технологии является машиночитаемый носитель, содержащий инструкции, которые включают в себя исполняемые на компьютере инструкции для выполнения любых описанные здесь способов.
[23] Представленное выше описание упрощенных вариантов осуществления технологии служит для понимания ее основных аспектов. Настоящее описание не является исчерпывающим для всех рассматриваемых вариантов осуществления технологии, и не предназначено для определения ключевых или важнейших элементов всех вариантов осуществления технологии или для ограничения объема любого или всех вариантов осуществления технологии. Единственной его целью является представление одного или нескольких предметов в упрощенной форме перед более подробным описанием, которое следует ниже. Для выполнения вышеизложенной задачи, один или несколько вариантов технологии включают в себя признаки, описанные и указанные в формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[24] Прилагаемые чертежи включены в данное описание и составляют его часть, иллюстрируют один или несколько примерных вариантов осуществления настоящей технологии и, вместе с подробным описанием, служат для пояснения принципов и вариантов осуществления технологии.
[25] На Фиг. 1 представлена система для определения наличия парковки, в соответствии с примерным вариантом осуществления технологии.
[26] На Фиг. 2А-2С представлены принципиальные схемы примерных сценариев с использованием системы для определения наличия парковки, в соответствии с примерным вариантом осуществления технологии.
[27] На Фиг. 3 представлена принципиальная схема графического пользовательского интерфейса для уведомления пользователей о наличии парковки, определенной в соответствии с примерным вариантом осуществления технологии.
[28] На Фиг. 4 представлена блок-схема способа определения наличия парковки, в соответствии с примерным вариантом осуществления технологии.
[29] На Фиг. 5 представлена блок-схема способа определения наличия парковки, в соответствии с другим примерным вариантом осуществления технологии.
[30] На Фиг. 6 представлена блок-схема способа управления наличием парковки, в соответствии с примерным вариантом осуществления технологии.
[31] На Фиг. 7 представлена принципиальная схема компьютерной системы общего назначения, на которой могут быть реализованы описанные система и способ в соответствии с примерным вариантом осуществления технологии.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[32] Примерные варианты осуществления описаны здесь в контексте системы, способа и компьютерного программного продукта для определения наличия парковки. Специалистам в данной области техники будет понятно, что следующее описание является исключительно иллюстративным и не предназначено для установления каких-либо ограничений. Другие аспекты будут очевидны специалистам в данной области техники, обладающих преимуществами от прочтения настоящего описания. Теперь подробнее будут описаны варианты осуществления аспектов, проиллюстрированных в прилагаемых чертежах. На всех чертежах и в нижеследующем описании одни и те же элементы по возможности будут пронумерованы одинаково или похоже.
[33] На Фиг. 1 представлена система 100 для определения наличия парковки, в соответствии с примерным вариантом осуществления технологии. Система 100 включает в себя множество электронных устройств 102, 103, которые коммуникативно соединены с серверной системой 110 с помощью сети 120, такой как Интернет, с помощью проводного или беспроводного подключения. Пользовательские устройства 102 могут быть мобильным устройством, смартфоном, планшетом, настольным компьютером, ноутбуком, навигационной системой в транспортном средстве и т.д. В одном аспекте, пользовательские приложения 102 могут включать в себя один или несколько датчиков 104, модуль 106 определения местоположения и навигационное приложение 108. Несмотря на то, что подробно на Фиг. 1 представлено одно пользовательское устройство 102, следует иметь в виду, что другие пользовательские устройства 103 могут быть выполнены аналогичным образом. Для упрощения, пользовательское устройство 102 связано с пользователем, который покидает парковочное место, а другие пользовательские устройства 102 связаны с другими пользователями, которые могут искать парковочное место, но следует иметь в виду, что в других случаях пользователь пользовательского устройства 102 может искать парковочное место, и по меньшей мере одно из других пользовательских устройств 103 может быть тем, которое покидает парковочное место.
[34] В одном аспекте, серверная система 110 может включать в себя навигационный модуль 115, модуль 112 управления парковкой и базу 113 данных, выполненную с возможностью хранить множество из одного или нескольких связанных с устройством местоположений 114, карты 116 и информацию, связанную с парковочными местами на картах 116.
[35] Датчики 106 пользовательского устройства выполнены с возможностью предоставлять данные от датчика, связанные с физическим движением пользовательского устройства 102. Подобные данные от датчика могут использоваться для обнаружения активности или характера перемещения пользователя пользовательского устройства 102. В некоторых аспектах, датчики 104 могут включать в себя одbу или несколько элементов из акселерометра, гироскопа, компаса, барометра, монитор сердечного ритма, фото-датчики и другие дискретные или интегрированные электромеханические устройства. В некоторых аспектах, сенсоры 104 могут быть интегрированы в то же самое пользовательское устройство 102, на котором работает навигационное приложение 108. В других примерах, один или несколько датчиков 104 может быть расположено на другом устройстве, например, надеваемое устройство, такое как умные часы, которое выполнено с возможностью предоставлять данные от датчика пользовательскому устройству 102.
[36] Модуль 106 определения местоположения может быть выполнен с возможностью создавать данные на основе местоположения, связанные с местоположением пользовательского устройства 102. В некоторых аспектах, метод 106 определения местоположения может представлять собой GPS-приемник, выполненный с возможностью получать информацию от GPS-спутников, и далее вычислять географическое положение пользовательского устройства. В некоторых аспектах, модуль 106 определения местоположения может быть выполнен с возможностью дополнять GPS-информацию с помощью способов сопоставления беспроводных сетей, которые определяют географическое положение на основе наличия конкретных беспроводных сетей поблизости от пользовательского устройства (например, Wi-Fi сопоставление).
[37] В одном аспекте, навигационное приложение 108 (например, выполняемое на пользовательском устройстве 102) может быть выполнено с возможностью выполнять сервисы картографии и информации о маршруте, предоставляемые модулем 115 навигации (например, выполняемом на сервере 110) на основе географического положения пользовательского устройства. Примером навигационного приложения 108 могут быть приложениями Яндекс.Карты™ или Яндекс.Навигатор™, которые разработаны компанией Яндекс®.
[38] В одном аспекте, навигационное приложение 108 может включать в себя модуль 107 парковки, выполненный с возможностью обнаруживать, когда пользователь припарковывает транспортное средство, в котором находится пользовательское устройство 102, и когда пользователь покидает парковочное место в транспортном средстве. Модуль 107 парковки может быть использован для обнаружения того, когда пользовательское устройство находится в транспортном средстве, которое въезжает на парковочное место или выезжает из него, которое может представлять собой парковочное место, находящееся на публичной парковке, парковке торгового центра, парковке гипермаркета, на городских улицах, парковке стадиона и в других местах, где существует высокая автомобильная загруженность, и где может быть полезно уведомление о наличия парковки.
[39] В одном аспекте, модуль 107 парковки может использовать данные от одного или нескольких датчиков для обнаружения изменения в характере перемещения. Модуль 107 парковки может определять характер перемещения (т.е. того, что пользователь выполняет действие, связанное с парковкой) на основе изменения в характере перемещения. Модуль 107 парковки может быть выполнен с возможностью создавать и передавать серверу 110 указание на изменение в характере перемещения пользовательского устройства, которое использует данные от одного или нескольких датчиков 104. Таким образом, в отличие от обычных подходов, которые требуют от пользователя сообщать о свободных парковочных местах, модуль 107 парковки автоматически создает и передает это изменение в характере перемещения, не требуя явного действия от пользователя, который объявляет о доступном парковочном месте.
[40] В одном примере, модуль 107 парковки может сначала определять, что пользовательское устройство 102 связано с пешеходом ("ходьба") на основе данных от датчика, полученных от акселерометра 104, которые обладают конкретным шаблоном и/или частотой. Позже, модуль 107 парковки далее определяет, что пользовательское устройство находится в автомобиле ("вождение") на основе данных о скорости от модуля 106 определения местоположения и данных от датчика, полученных от акселерометра 104, которые обладают конкретным шаблоном, связанным с автомобильным движением. В данном примере, модуль 107 парковки может создавать указание на изменение в характере перемещения от "ходьбы" на "вождение", которое модуль 107 парковки использует для вывода о том, что пользователь начал вождение и, следовательно, покинул свое парковочное место.
[41] Например, на Фиг. 2А и 2В представлены виды сверху, иллюстрирующие примеры сценария, где пользователь 202 управляет транспортным средством 204 для выхода с парковочного места 206. Как показано на Фиг. 2А, в первоначальный момент времени, пользователь 202, использующий пользовательское устройство 102 идет к припаркованному транспортному средству 204, садится в транспортное средство и выезжает с парковочного места 206 (т.е. освобождает парковку). На Фиг. 2В представлен результат изменения в характере перемещения, которое включает в себя изменение с "ходьбы" (показано пунктирной линией 214) на "вождение" (показано точечной линией 216). Местоположение 212 изменения в характере перемещения находится возле парковочного места 206 (и других парковочных мест). Следует отметить, что местоположение 212 показано как смещенное относительно точного местоположения, где пользователь садится в транспортное средство на самом деле, чтобы отобразить реальную проблему неточности или "зашумленности" информации о местоположении, предоставляемой от пользовательского устройства. Тем не менее, модуль 112 управления парковкой на серверной системе 110 получает от модуля 107 парковки, исполняемого на пользовательском устройстве 102, указание на изменение в характере перемещения уточняет, что изменение в характере перемещения происходит с "ходьбы" на "вождение", предполагая, что на местоположении 212 пользователь совершил действие по освобождению парковки.
[42] Возвращаясь к Фиг. 1, в некоторых вариантах осуществления технологии, модуль 107 парковки может использовать системную библиотеку, имеющуюся на пользовательском устройстве 102 для определения характера перемещения пользовательского устройства 102, например, библиотеку Core Motion Activity на операционной системе iOS®, или интерфейса программирования приложений Activity Recognition на операционной системе Android™. В дополнении к "ходьбе" и "вождению", другие примеры характера перемещения, которые могут быть обнаружены, включают в себя указания на то, что пользовательское устройство находится на велосипеде ("езда на велосипеде"), что пользовательское движение находится на бегущем человеке ("бег"), что пользовательское устройство находится в "состоянии покоя", или что пользовательское устройство находится в поезде или электричке.
[43] Как модуль 107 парковки может определить, когда пользовательское устройство покидает парковочное место, модуль 107 парковки может обнаружить, когда пользовательское устройство находится в транспортном устройстве, которое паркуется на парковочном месте. Модуль 107 парковки может использовать подобную информацию, в сочетании с вышеописанным изменением в характере перемещения, для определения того, что парковочное место становится доступным. В некоторых аспектах, модуль 107 парковки может использовать местоположение прошлого изменения в характере перемещения для определения того, что последующее изменение в характере перемещения в том же самом местоположение представляет собой действие, связанное с парковкой. Например, в первоначальный момент времени, модуль 107 парковки обнаруживает изменение в характере перемещения с "вождения" на "ходьбу", указывающее на парковку пользователя на парковочном месте. Модуль 107 парковки сохраняет местоположение изменения в характере как местоположение действия парковки пользователя. В последующий момент времени, когда пользователь возвращается к своему автомобилю (т.е. идет назад) и выезжает с парковочного места, модуль 107 парковки определяет это изменение в характере с "ходьбы" на "вождение"и идентифицирует его как возможное действие выезда с парковки. Поскольку местоположение действия выезда с парковки совпадает (или по существу близко) с местоположением прошлого действия парковки, модуль 107 парковки может определить, что пользовательское устройство вовлечено в характер перемещения выезд из парковки.
[44] В некоторых аспектах, модуль 107 парковки может определять характер перемещения "парковка" (т.е. что пользовательское устройство находится в транспортном средстве, которое паркуется в парковочном месте) на основе изменения в характере перемещения от "вождения" к "ходьбе", которое происходит возле пункта назначения, которое предоставляется навигационным приложением 108. Этот аспект может применяться к ситуации, в которой пользователь использует навигационное приложение 108 для предоставления маршрута к пункту назначения, достигает пункта назначения и паркует возле свой автомобиль возле пункта назначения.
[45] В других аспектах, модуль 107 парковки может определить характер перемещения парковка, когда пользовательское устройство устанавливает или завершает беспроводное подключение к автомобилю. Подобные автомобили включают в себя так называемые "информационно-развлекательные" системы, которые предоставляют возможность беспроводного подключения (например, через технологию Bluetooth®) к пользовательскому устройству для телефонных звонков, прослушивания музыки или других свойств. Таким образом, модуль 107 парковки может использовать установку беспроводного соединения с информационно-развлекательной системой автомобиля, что обычно происходит, когда пользователь заводит автомобиль, как фактор в определении того, что пользовательское устройство находится в транспортном устройстве, покидающем парковочную площадку. Аналогично, модуль 107 парковки может использовать завершение беспроводного соединения с информационно-развлекательной системой автомобиля, что обычно происходит, когда пользователь отключает автомобиль, как фактор в определении того, что пользовательское устройство находится в транспортном устройстве, которое только что было припарковано.
[46] В соответствии с одним аспектом, модуль 112 управления парковкой (например, исполняемый на серверной системе 110) может быть выполнен с возможностью получать указание на изменение (109) в характере перемещения от одного или нескольких пользовательских устройств 102. В некоторых аспектах, указание на изменение в характере перемещения может быть получено как определение, совершенное самим пользовательским устройством 102; в других аспектах, полученное указание на изменение в характере может представлять собой сырые данные от датчиков 104 пользовательского устройства (которые далее использует модуль 112 управления парковкой для подобного определения); или же возможна комбинация обоих подходов. В некоторых аспектах, полученное указание на изменение в характере перемещения указывает на изменение с первого характера перемещения (т.е. "ходьба") на второй характер перемещения (т.е. "вождение") в первом местоположении (например, GPS-координаты).
[47] Указание на изменение в характере перемещения может быть связано с конкретным шаблоном характера из множества заранее определенных шаблонов характера. Например, указание на изменения характера с "вождения" на "ходьбу" может предполагать, что пользователь покинул свое транспортное средство. В другом примере, указание на обратное изменение на "вождение" может предполагать, что пользователь вернулся в транспортное средство и покинул парковочное место.
[48] Каждое указание на изменение (109) в характере перемещения, которое получает серверная система 110, может включать в себя первоначальные координаты местоположения (например, на основе координат пользовательского устройства, определенных с помощью GPS), связанного с конкретным пользовательским устройством. Сервер может сохранять каждый из сигналов вместе с соответствующей временной отметкой о полученном сигнале в базе 113 данных (например, связанные с устройством местоположения 114).
[49] В некоторых аспектах, модуль 112 управления парковкой может быть выполнен с возможностью определять, находится ли местоположение в заранее определенной пороговой области по меньшей мере одного из прошлых связанных с устройством местоположений 114. Этот процесс относится к реальной проблеме того, что пользователи активируют свое навигационное приложение 108 только после того как покидают парковочное место (т.е. выезжают с парковки). В этом примере, даже если задержка составляет 2 минуты, модуль 112 управления парковкой, относящийся к серверу, получит "зашумленные" координаты, т.е. координаты местоположения, которые могут быть неточными относительно настоящего местоположения, где пользователь поменял характер перемещения, например, с ходьбы на вождение. Если это так, модуль 112 управления парковкой может использовать предыдущее местоположение (если доступно), например, если пользователь использовал навигационное приложение 108 во время парковки транспортного средства, и устройство 102 отправило информацию о местоположение на сервер. В других аспектах, модуль 112 управления парковкой может использовать прошлое местоположение пользователя для модификации местоположения, сообщенного в указании 109 на изменение в характере поведения, например, путем усреднения двух местоположений.
[50] В одном аспекте, модуль 112 управления парковкой может быть выполнен с возможностью сопоставлять примерное местоположение пользователя (или изменения в характере перемещения) со множеством парковок вокруг пользователя. В некоторых аспектах, модуль 112 управления парковки может сопоставлять примерное местоположение пользователя со множеством парковок возле пользователя, например, в ближайшей области на карте. В некоторых аспектах, навигационный сервер может использовать карту доступных парковок, находящихся поблизости от местоположения пользователя (например, пороговая область в пределах 100 метров).
[51] В некоторых аспектах, модуль 112 управления парковкой может сохранять записи о заранее определенных парковочных местах 116 в базе 113 данных. Записи о парковочных местах 116 могут быть организованы в записи о парковках (также упоминаемых как парковочные площади), которые содержат эти парковочные места, которые указывают на набор свойств для каждой парковки, включая географическое местоположение парковки (например, GPS-координаты или индексы раздела карты), тип парковки (например, общая, только по пропускам, только для местных жителей, оплачиваемая, временная), общее количество парковочных мест, и популярность парковки (например, как часто парковка использовалась в прошлом). Ради примера, парковка в центре города может быть отмечена как местоположение, обладающее пятью парковочными местами, и также на той же улице может быть от двух от трех парковок с пятью парковочными местами. В одном примере, две записи могут указывать на то, что улица А обладает двумя парковками, каждая из которых обладает тремя парковочными местами. В некоторых аспектах настоящего описания, уровень точности или детализации описанного способа может быть адаптирован к масштабу, связанному с парковкой (а не с парковочными местами), причем конкретные места на парковках могут находиться поблизости в пределах погрешности в 1 метр в рамках одной и той же улицы. Следовательно, аспекты настоящего описания предназначены для обнаружения площади с возможным свободным местом для того, чтобы сориентировать пользователей с помощью информации о потенциально свободных парковочных местах.
[52] В одном аспекте, модуль 112 управления парковкой может быть выполнен с возможностью определять парковочные места-кандидаты, близкие к определенному (или текущему) местоположению пользователя, и вычислять набор вероятностей, каждая вероятность из набора вероятностей указывает на вероятность того, какое парковочное место было занято транспортным средством пользователя, и какое место стало теперь доступным. Таким образом, каждое парковочное место-кандидат индивидуально получает весовой коэффициент (вероятность), указывающую на доверительный уровень того, что это парковочное место является тем, где было припарковано транспортное средство пользователя.
[53] В некоторых аспектах, модуль 112 управления парковкой может вычислять набор вероятностей на основе вероятности наличия парковки на соответствующем парковочном месте, P(parki), которая считается зависящей от текущего спроса на парковочное место, наличия и максимальной емкости, как показано в Уравнении (1) ниже:

где fcool - функция для определения конкретной вероятности и может быть разной для разных городов. Например, для первого города (например, Москва) и парковочных мест на улицах, ƒcool может быть функцией первой вероятности, которая представляет линейные парковочные места на улицах, а для второго города (например, Лос-Анджелес) и соответствующих парковочных площадках перед торговыми центрами с сотнями парковочных мест на каждой парковке, может применяться вторая функция вероятности. В некоторых аспектах, первая функция вероятности может быть общей функцией распределения, а вторая функция вероятности может быть функцией распределения масс. В некоторых аспектах, каждая функция вероятности использует набор факторов, описанных здесь как многомерная случайная величина или случайный вектор.
[54] В некоторых аспектах, каждое событие, связанное с характером перемещения, зависит от оценки определения расстояния. В практическом смысле, оценка показывает близость пользовательского местоположения по меньшей мере к одной парковочной площадке. Следовательно, если система определяет, что пользователь находится далеко от ближайшей парковочной площадки, система может определять, что определение события парковки отсутствует, как показано в Уравнениях (2) и (3)

где х, у - соответствующее координаты события и парковочного места и

Кроме того, модуль 112 управления парковкой может вычислять вероятность события парковки на основе следующего примера в Уравнении (4) далее:

[55] Например, как показано на Фиг. 2С, модуль 112 управления парковкой совпадает с приближенным местоположением 212 пользователя ко множеству парковочных мест 234 вокруг пользователя, например, в области 232 карты. Модуль 112 управления парковкой определяет, что пользователь 202 обладает вероятностью того, что пользователь 202 покидает место А с вероятностью 0,2; место В с вероятностью 0,7; место С с вероятностью 0,1 и т.д., на основе, например, таких факторов как текущее местоположение пользователя в отношении местоположения каждого парковочного места, информации о времени вождения пользователя (если доступно, последнего известного местоположения пользователя, направления, в котором пользователь ехал по отношению к парковочному месту-кандидата.
[56] В некоторых аспектах, модуль 112 управления парковкой может использовать набор дополнительных факторов для вычисления вероятностей для каждого из парковочных мест. Набор факторов может включать в себя, без установления ограничений: размер парковки (например, физический размер места, число парковочных мест); расстояние от пользователя до доступного парковочного места; текущую скорость вождения транспортного средства, в котором находится пользовательское устройство 102 (если доступно), и другие факторы, которые описаны ниже. В некоторых вариантах осуществления технологии, модуль 112 управления парковкой может включать в себя доверительный уровень того, что парковочное место связано с местоположением изменения в характере перемещения на основе, по меньшей мере частично, числа раз - в соответствии с ранее записанными местоположениями - когда другие пользователи использовали парковочное место (т.е. "популярность"). В некоторых вариантах осуществления технологии, модуль 112 управления парковки может вычислять доверительный уровень того, что парковочное место связано с местоположением изменения в характере перемещения, на основе, по меньшей мере частично, числа ранее записанных местоположений, которые были связаны или соответствовали текущему парковочному месту в недавний период времени (например, последний час, последние 24 часа и т.д.). Это использование ранее записанных местоположений (т.е. журналов истории) позволяет модулю 112 управления парковкой правильно связывать пользовательское местоположение с парковочной площадкой, конкретно в местоположениях, где помехи или шум в GPS-сигнале постоянно вносят неточности. В некоторых вариантах осуществления технологии, модуль 112 управления парковкой может включать в себя доверительный уровень того, что парковочное место связано с местоположением изменения в характере перемещения на основе типа парковки (например, бесплатная, платная, только для местных жителей), связанной с парковочным местом. Конкретный тип парковки может обладать соответствующим весовым коэффициентом (для этапа определения "популярности"). Другими словами, число ранее записанных местоположений или число событий парковки в каждом месте или на парковке считается указывающим на то, сколько пользователей или сколько мест на парковке было использовано, например, за прошлую неделю. Например, свободному парковочному месту может быть назначен более высокий весовой коэффициент, чем платному парковочному месту, а парковочным местам только по пропускам или только для местных жителей будет назначен самый низкий весовой коэффициент из всех. Весовые коэффициенты могут быть включены в вычисление вероятности как дополнительный фактор.
[57] В некоторых вариантах осуществления, каждому из набора факторов может быть назначен различный весовой коэффициент, используемый для вычисления соответствующей вероятности. Например, модуль 112 управления парковкой может вычислять вероятность, связанную с конкретным парковочным местом на основе большого положительного весового фактора расстояния до парковочного места и на основе меньшего положительного весового фактора популярности парковочного места.
[58] В одном аспекте, модуль 112 управления парковкой может быть выполнен с возможностью осуществлять определение доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вероятностей. То есть, сервер конкретно связывает или соединяет, на основе наиболее высокого доверительного уровня (вероятности), текущее изначальное местоположение пользователя по меньшей мере с одним из набора мест-кандидатов (как парковочной площадки, которую покинул пользователь). В вышеприведенном примере, модуль 112 управления парковкой определяет, что вероятность 0,7 (связанная с местом В) является максимальным доверительным уровнем из всех мест-кандидатов и, следовательно, определяет, что пользователь покинул место В.
[59] В одном аспекте, модуль 112 управления парковкой может быть выполнен с возможностью определять парковочные места, связанные с изменением в характере перемещения, на основе вычисленных низких вероятностей из набора вероятностей. Для этих парковочных мест, модуль 112 управления парковкой может записывать указания (на основе оценок увеличенного времени) на фактически менее популярные парковочные места. Модуль 112 управления парковкой может менее часто рекомендовать эти менее популярные парковочные места (например, они могут быть менее заметными или более труднодоступными и т.д.) для пользователей.
[60] Модуль 112 управления парковкой может быть далее выполнен с возможностью предоставлять другим пользовательским устройствам 103 уведомления 111 о доступных парковочных местах, указывающие на потенциально доступное парковочное место на недавно покинутое место. Информация о доступных парковочных местах может быть доставлена другим пользователям навигационного программного обеспечения, которые разметили маршруты с пунктом назначения недалеко от этого места.
[61] В некоторых аспектах, модуль 107 парковки других устройств 103 может быть выполнен с возможностью модифицировать графический пользовательский интерфейс навигационного приложения 108 для отображения уведомления о доступном парковочном месте в пределах области карты. Пример подобного уведомления представлен на Фиг. 3.
[62] На Фиг. 3 представлена принципиальная схема последовательности графических пользовательских интерфейсов 300 для уведомления пользователей о наличии парковки, определенной в соответствии с примерным вариантом осуществления технологии. Графические интерфейсы пользователя 300 могут быть созданы, отрисованы и отображаются на пользовательских устройствах 103, выполненных с возможностью получать уведомления 111 о доступных парковочных местах. Как показано на чертеже, графический пользовательский интерфейс 300 включает в себя картографическое изображение 301, на котором присутствует указание на маршрут (показано как линия 304) с конечной точкой (показано как иконка 306). В ответ на получение уведомления 111, навигационное приложение 108 может модифицировать графический пользовательский интерфейс 300 таким образом, чтобы он включал в себя графическое указание 302, уведомляющее пользователя о возможном наличии доступного парковочного места. Графическое указание 302 включает в себя одну или несколько иконок 308 (например, иконка отъезжающего автомобиля), указывающих на доступное парковочное место, и отрисованных в области картографического изображения, соответствующей приблизительному местоположению доступного парковочного места. Графическое указание 302 может далее указывать на временную отметку 303, связанную с уведомлением о наличии ("Было свободно 5 минут назад"), которая может быть определена модулем 112 управления парковкой с помощью временной отметки об указании на изменение в характере перемещения.
[63] В некоторых аспектах, графическое указание 302 далее включает в себя указание на вероятность 305 наличия парковки, связанную с наличием парковки, которая представляет вероятность того, что текущий пользователь навигации сможет занять парковочное место. В некоторых аспектах, указание на вероятность 305 наличия парковки может быть отрисовано в виде текстовой информации (например, "Это место может быть свободно"). Текстовая информация может относиться к диапазону вероятностей наличия парковки от более вероятной к менее вероятной (например, от "Большая вероятность того, что это место свободно" до "Возможно, это место свободно"). В некоторых аспектах, указание на вероятность наличия парковки может быть представлено с помощью других графических признаков, соответствующих различным вероятностям, включая цвет шрифта, насыщенность шрифта, тип шрифта и т.д. Например, если вероятности наличия парковки высокие, т.е. высокая вероятность того, что пользователь навигации сможет занять парковочное место, указание на вероятность 305 наличия парковки может быть отрисовано зеленым цветом; если низкая, то указание может быть отрисовано красным цветом. В некоторых аспектах, навигационное приложение может сопоставлять численное указание наличия парковки с соответствующим текстовым или графическим указанием с помощью способов дискретизации. Например, в ответ на получение значения вероятности наличия парковки 0,8, навигационное приложение может определить, что это значение попадает в диапазон от 0,75 до 1.0, и создать и отрисовать текст "Большая вероятность того, что это место свободно" жирным зеленым шрифтом. В другом примере, в ответ на получение значения вероятности наличия парковки 0,13, навигационное приложение может определить, что это значение попадает в диапазон от 0,0 до 0, 33, и создать и отрисовать текст "Возможно, это место свободно" красным шрифтом.
[64] В некоторых аспектах, графическое указание 302 может включать в себя один или несколько контрольных элементов (например, кнопок), связанных с доступным парковочным местом. Один контрольный элемент может представлять собой кнопку 307 "Go" ("Перейти"), выполненную с возможностью, при ее активации, сигнализировать модулю 112 управления парковкой о желании пользователя навигации занять доступное парковочное место. В некоторых аспектах, в ответ на активацию пользователем кнопки 307 Go (например, нажатие, прикосновение и т.д.), навигационное приложение 108 может построить новый маршрут или модифицировать старый маршрут, обладающий пунктом назначения или остановкой в местоположении доступного парковочного места.
[65] Другим контрольным элементом графического указания 302 может быть кнопка 309 предварительного просмотра, выполненная с возможностью, при ее активации, предоставить пользователю навигации информацию, связанную с доступным парковочным местом. В показанном примере, в ответ на активацию пользователем (например, прикосновением) кнопки 309 предварительного просмотра, навигационное приложение 108 может модифицировать графический пользовательский интерфейс таким образом, чтобы он включал в себя графический предварительный обзор 310 парковочного места. Например, графический предварительный обзор 310 может включать в себя изображение карты, иллюстрирующее доступное парковочное место (показано как прямоугольник 312) в контексте окружающих парковочных мест (показаны как прямоугольники 314). Доступное парковочное место может быть отрисовано иначе, чем окружающие (занятые) парковочные места, например, с помощью другого цвета, формы или параметра заполнения (как показано на Фиг. 3). Изображение карты может быть отрисовано как перекрывающее оригинальное картографическое изображение 301 или добавленное в него. В некоторых аспектах, картографическое изображение парковочных мест может быть предоставлено с помощью модуля 112 управления парковкой из базы 113 данных карт и парковочных мест 116.
[66] В соответствии с одним аспектом настоящего описания, модуль 112 управления парковкой может быть выполнен с возможностью применять вероятностный анализ для определения того, какие пользователи других устройств 103 (упоминаемых здесь как пользователи навигации) более вероятно займут доступное парковочное место. В этом аспекте, модуль управления парковкой сначала идентифицирует, с помощью записей о парковочных местах, хранящихся в базе 113 данных, доступное парковочное место на основе полученного указания на изменение характера перемещения (как было описано выше). Модуль управления парковкой далее определяет одного или нескольких пользователей навигации, которые либо в текущий момент близки к доступному парковочному месту либо следуют по пути (т.е. предоставленному навигационным приложением) с конечной точкой поблизости от доступного парковочного места.
[67] В соответствии с одним аспектом, модуль 112 управления парковкой может вычислять для каждого пользователя навигации другую форму вероятности, упоминаемую здесь как вероятность наличия парковки, связанную с вероятностью того, что соответствующий пользователь навигации сможет занять парковочное место. Вероятность наличия парковки может использовать набор факторов для вычисления вероятностей наличия парковки для каждого пользователя навигации, например, расстояние от текущего местоположения пользователя навигации до местоположения доступного парковочного места, расчетное время прибытия по навигации к доступному парковочному месту, число других пользователей навигации в области вокруг доступного парковочного места, число других пользователей навигации, чьи конечные точки маршрутов находятся недалеко от доступного парковочного места. Другими факторами, которые могут быть использованы для вычисления вероятности наличия парковки для соответствующего пользователя навигации, могут являться: популярность парковки (например, определенная с помощью частоты того, как другие пользователи используют парковочное место в соответствии с прошлыми записями о местах парковки); размер парковки, в котором находится доступное парковочное место (связано с парковочной емкостью ближайшей области); тип парковки, например, бесплатная, оплачиваемая, только по пропускам, и/или ограниченная по времени (связано со спросом на парковочные места); число других пользователей, обладающих высокими вероятностями занимания конкретного парковочного места; наличие пожарного гидранта рядом с парковочным местом; улица, сторона парковки на которой может зависеть от расписания уборки; приостановление правил запрета на парковку в связи с текущими праздниками или выходными; отсутствие парковки из-за закрытия улиц по причине, например, текущего ремонта дорог, карнавалов, парадов, благотворительных вечеринок, визитов высокопоставленных лиц и т.д.; а также другие причины, которые могут влиять на наличие парковки.
[68] В некоторых аспектах, модуль 112 управления парковкой может внедрять вычисленную вероятность наличия парковки, связанную с пользователем навигации, в каждую из вероятностей (т.е. доверительных уровней), связанных с парковочным местом для того чтобы вычислить совокупную вероятность, связанную с парковочным местом. Таким образом, модуль 112 управления парковкой может определять совокупную вероятность на основе доверительного уровня (РА) того, что другой пользователь покинул конкретное парковочное место, и вероятности наличия парковки (РР) того, что конкретный пользователь навигации сможет занять парковочное место. Это отношение может быть представлено в виде Уравнения (5).

где РC - совокупная вероятность, связанная с вероятностью того, что данное парковочное место доступно и того, что данный пользователь займет парковочное пространство, и где w1 и w2 - весовые коэффициенты или факторы коэффициентов, связанные с доверительным уровнем РА и вероятностью наличия парковки РP соответственно. В некоторых аспектах, вычисленная совокупная вероятность может быть вычислена на основе суммы соответствующих (w1Pa) и (w2Pp). В некоторых аспектах, вычисленная совокупная вероятность может использоваться вместо вероятности наличия парковки, например, при определении того, каких пользователей навигации следует уведомить, как описано ниже.
[69] В одном аспекте, модуль 112 управления парковкой может быть выполнен с возможностью передавать, в соответствии с вычисленными вероятностями наличия парковки, уведомление о доступном парковочном месте по меньшей мере одному из пользователей навигации. В некоторых аспектах, модуль 112 управления парковкой может выбирать подмножество пользователей навигации, обладающих соответствующей вероятностью наличия парковки, связанной с получением доступного парковочного места, которая превышает пороговое значение, и передавать уведомление выбранному подмножеству. Например, модуль 112 управления парковкой может уведомлять только тех пользователей навигации, которые обладают вероятностью наличия парковки 0,75 или выше, связанной с парковочным местом (другие пороговые вероятности также могут быть использованы). Это может помочь избежать отправки уведомлений с низкой вероятностью успеха, тем самым снижая нагрузку на сетевые и вычислительные ресурсы, которые используются системой. В других аспектах, модуль 112 управления парковкой может ранжировать пользователей навигации в соответствии с соответствующей вероятностью наличия парковки, связанной с доступным парковочным местом, и передавать уведомление подмножеству ранжированных пользователей навигации (например, верхним N). Например, модуль 112 управления парковкой может уведомлять пользователей навигации, обладающих десятью (или иным количеством) наиболее высокими вероятностями наличия парковки.
[70] В некоторых аспектах, модуль 107 парковки на стороне клиента (например, пользовательского устройства 102) и модуль 112 управления парковкой на стороне сервера (например, серверной системы 110) могут быть выполнены с возможностью распределять вышеописанные операции в различных конфигурациях. То есть, в некоторых аспектах, конкретные действия могут быть изменены для выполнения на стороне клиента или для выполнения на стороне сервера. Например, в альтернативных аспектах, вместо передачи определений изменений в характере перемещения серверу, модуль 107 парковки на стороне клиента может быть выполнен с возможностью загружать карты и информацию, связанную с парковочными местами для вычисления набора вероятностей самостоятельно. После вычисления наиболее высокой вероятности парковочного места, модуль 107 парковки на стороне клиента может передавать указание на доступное парковочное место, которое указывает на географическое местоположение парковочного места (например, GPS-координаты) или другой идентификатор (например, уникальный ID парковочного места). Аналогично, в альтернативных аспектах, вместо получения определения изменений в характере перемещения, модуль 112 управления парковкой на стороне сервера может получать сырые данные датчика от модуля 107 парковки и определять парковочное поведение на основе полученных данных датчиков.
[71] В другом аспекте настоящего описания, модуль 107 парковки может выполняться на навигационном устройстве самого автомобиля. Например, навигационное приложение 108 может быть навигационным модулем, который интегрирован в информационно-развлекательную систему автомобиля или отдельным GPS-навигатором (например, приемником TomTom®). В подобных аспектах, модуль 107 парковки может по-прежнему направлять изменения в характере перемещения с помощью данных, полученных от контрольного модуля автомобиля (например, системы управления двигателем), который может предоставлять указание на то, когда автомобиль находится в режиме парковки или в режиме езды, а также информацию о том, когда автомобиль заводится и отключается.
[72] Термин "модуль" в данном контексте означает физическое устройство, аппарат или множество модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, например, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функционал модуля, которые (при выполнении) трансформируют микропроцессорную систему в устройство специального назначения. Модуль также может быть реализован в виде комбинации обоих, причем некоторые конкретные функций реализуются за счет аппаратного обеспечения, а другие функции реализуются комбинацией аппаратного и программного обеспечения. В некоторых вариантах осуществления технологии, по меньшей мере, частично, в некоторых случаях модуль может быть реализован на процессоре компьютера общего назначения (например, на таком, который описан подробнее ниже на Фиг. 7). Соответственно, каждый модуль может быть реализован в виде множества различных конфигураций и не ограничивается конкретным вариантом осуществления, приведенным здесь в качестве примера.
[73] На Фиг. 4 представлена блок-схема способ 400 для определения наличия парковки, который может выполняться парковочным модулем 107, исполняемом на пользовательском устройстве 102 в соответствии с одним вариантом осуществления технологии. Следует отметить, что следующее описание примера способа относится к системе и компонентам, которые описаны выше.
[74] На этапе 402, парковочный модуль 107 (например, выполняемый на пользовательском устройстве 102) может определять первый характер перемещения пользовательского устройства на основе данных датчиков пользовательского устройства. В одном примере, характером перемещения может быть "ходьба". В некоторых аспектах, модуль 107 парковки может определять, что пользовательское устройство 102 связано с пешеходом ("ходьба") на основе данных от датчика, полученных от акселерометра 104, которые обладают конкретным шаблоном и/или частотой. То есть, показания акселерометра и других датчиков 104 коррелируют с физическим движением пользователя, включая конкретные толчки и покачивания, связанные с конкретным ритмом ходьбы человека.
[75] На этапе 404, модуль 107 парковки определяет изменение во втором характере перемещения пользовательского устройства. Например, характер перемещения может изменяться с "ходьбы" (как было определено на этап 420) на "вождение". В некоторых аспектах, модуль 107 парковки может определить, что пользовательское устройство находится в автомобиле на основе данных о скорости от модуля 106 определения местоположения и данных от датчика, полученных от акселерометра 104, которые обладают конкретным шаблоном, связанным с автомобильным движением. Например, данные о скорости от модуля 106 определения местоположения, которые указывают на то, что пользовательское устройство обладает скоростью больше 40 км/ч, явно говорят о режиме передвижения в автомобиле или другом транспортном устройстве. В то же время, данные от акселерометра могут указывать на то, что происходит физическое движение с плавным ускорением и скоростью.
[76] На этапе 406, модуль 107 парковки определяет характер парковки пользовательского устройства на основе изменения в характере перемещения. То есть, модуль 107 парковки может определять, что пользователь покинул свое парковочное место, на основе данных, указывающих на то, что пользовательское устройство находилось у пешехода, а теперь находится в автомобиле, что предполагает ситуацию, в которой пользователь подходит к своему припаркованному автомобилю и уезжает с парковочного места.
[77] На этапе 408, модуль 107 парковки может передавать указание на изменение 109 в характере перемещения от пользовательского устройства 102 на модуль 112 управления парковкой, работающий на серверной системе 110. Переданное указание на изменение (109) в характере перемещения может включать в себя данные о местоположении (например, на основе определенных GPS-координат пользовательского устройства), связанные с пользовательским устройством 102, вместе с временной отметкой, указывающей на дату и время изменения в характере перемещения.
[78] На Фиг. 5 представлена блок-схема способа 500 для определения наличия парковки, который может выполняться модулем 112 управления парковки на серверной стороне в соответствии с одним примерным вариантом осуществления технологии. Следует отметить, что следующее описание примера способа относится к системе и компонентам, которые описаны выше.
[79] На этапе 502, модуль 112 управления парковкой получает указание на изменение в характере перемещения от пользовательского устройства. Указание на изменение в характере перемещения может включать в себя местоположение и временную отметку, связанные с изменением в характере перемещения. В некоторых аспектах, указание на изменение в характере перемещения может быть получено как определение, совершенное самим пользовательским устройством 102; в других аспектах, полученное указание на изменение в характере может представлять собой сырые данные от датчиков 104 пользовательского устройства (которые далее использует модуль 112 управления парковкой для подобного определения); или же комбинация обоих подходов.
[80] На этапе 504, модуль 112 управления парковкой может опционально определять, находится ли местоположение в заранее определенной пороговой области по меньшей мере одного из прошлых связанных с устройством местоположений 114. Этот процесс относится к реальной проблеме того, что пользователи активируют их навигационное приложение 108 только после того как покидают парковочное место (т.е. выезжают с парковки). В этом примере, даже если задержка составляет 2 минуты, модуль 112 управления парковкой, относящийся к серверу, получит "зашумленные" координаты, т.е. координаты местоположения, которые могут быть неточными относительно настоящего местоположения, где пользователь поменял характер перемещения, например, с ходьбы на вождение.
[81] В этом случае, этап 506, в ответ на определение того, что полученное местоположение находится в пороговой близости к местоположению, связанному с устройством, модуль 112 управления парковкой может использовать предыдущее местоположение пользователя вместо местоположения, которое включено в указание изменения в характере перемещения (получено на этапе 502). В некоторых аспектах, модуль 112 управления парковкой может использовать предыдущее местоположение пользователя (если доступно), например, если пользователь использовал навигационное приложение 108 во время парковки транспортного средства, и устройство 102 отправило информацию о местоположение на сервер. В других аспектах, модуль 112 управления парковкой может использовать прошлое местоположение пользователя для модификации местоположения, сообщенного в указании 109 на изменение в характере поведения, например, путем усреднения двух местоположений.
[82] На этапе 508, модуль 112 управления парковкой может определять область карты, связанную с местоположением изменения в характере перемещения. В некоторых аспектах, модуль 112 управления парковки может совпадать с примерным местоположением пользователя с множеством парковок возле пользователя, например, в ближайшей области на карте. В некоторых аспектах, навигационный сервер может использовать карту доступных парковок, находящихся поблизости от местоположения пользователя (например, в пределах 100 метров).
[83] На этапе 510, модуль 112 управления парковкой определяет множество парковочных мест-кандидатов, которые будут связаны с изменением в характере перемещения устройства. В некоторых аспектах, модуль 112 управления парковкой определяет множество парковочных мест-кандидатов, которые расположены в области карты (как определено на этапе 508).
[84] На этапе 512, модуль 112 управления парковкой вычисляет набор вероятностей, связанных с парковочными местами-кандидатами. Каждая вероятность из набора вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате. В некоторых аспектах, каждое парковочное место индивидуально получает весовой коэффициент (вероятность), указывающий на вероятность того, что конкретное парковочное место будет связано с пользовательским местоположением.
[85] На этапе 514, модуль 112 управления парковкой осуществляет определение доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вероятностей. На этапе 516, модуль 112 управления парковкой передает уведомление о доступном парковочном месте на другие пользовательские устройства 103. В некоторых аспектах, модуль 112 управления парковкой передает уведомление, включающее в себя географическое местоположение определенного доступного парковочного места, на другие пользовательские устройства 103. В некоторых аспектах, переданное уведомление о доступном парковочном месте может включать в себя вероятность или доверительный уровень, связанный с наличием парковочного места.
[86] Другие пользовательские устройства 103 могут выполнять свои собственные версии навигационного приложения 108 для предоставления, например, их соответствующим пользователям сервисов прокладывания маршрута и навигации к конкретному пункту назначения. Модуль 112 управления парковкой может сделать вывод о том, что по меньшей мере некоторым из этих других пользователей может потребоваться парковка по достижении этих пунктов назначения. Таким образом, в некоторых аспектах, модуль 112 управления парковкой может определять одного или нескольких пользователей, которые обладают маршрутами и пунктами назначения поблизости к определенному доступному парковочному месту, и просто уведомляет этих пользователей о доступном парковочном месте.
[87] Возвращаясь к способу 401 на Фиг. 4 на этапе 410, модуль 107 парковки другого (второго) пользовательского устройства 103 может получать одно или несколько уведомлений о доступном парковочном месте от модуля 112. На этапе 412, модуль 107 парковки может модифицировать графический пользовательский интерфейс навигационного приложения 108 для отображения уведомления о доступном парковочном месте в пределах области карты.
[88] На этапе 414, модуль 107 парковки может определить характер парковки пользовательского устройства 103 на основе второго изменения в характере перемещения поблизости от доступного парковочного пространства. Таким образом, модуль 107 парковки может определить, что пользователь занял доступное парковочное место, и уведомляет модуль 112 управления парковкой о том, что парковочное место больше не доступно. В этом случае, модуль 112 управления парковкой может обновлять свои записи и/или больше не отображать наличие этого конкретного парковочного места.
[89] На Фиг. 6 представлена блок-схема способа 600 для управления наличием парковки, который может выполняться модулем 112 управления парковки на серверной стороне в соответствии с одним примерным вариантом осуществления технологии. Следует отметить, что следующее описание примера способа относится к системе и компонентам, которые описаны выше.
[90] На этапе 602, модуль 112 управления парковкой может получать указание на изменение в характере перемещения от устройства (например, пользовательского устройства 102). Указание на изменение в характере перемещения указывает на изменение с первого характера перемещения на второй характер перемещения в первом местоположении.
[91] На этапе 604, модуль 112 управления парковкой идентифицирует, с помощью записей о парковочных местах, хранящихся в базе 113 данных, доступное парковочное место на основе полученного указания на изменение характера перемещения. В некоторых аспектах, модуль 112 управления парковкой может использовать вероятностный анализ, в котором модуль 112 управления парковкой идентифицирует один или несколько парковочных мест-кандидатов на основе местоположения изменения в характере перемещения, связанного с пользователем устройства, и вычисляет набор вторых вероятностей, связанных с парковочными местами-кандидатами. Каждая вероятность из набора вторых вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате. Модуль 112 управления парковкой далее определяет доступное парковочное место, связанное с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вторых вероятностей. Набор вторых вероятностей, связанных с парковочными местами-кандидатами, может быть вычислен на основе по меньшей мере одного наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее-зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
[92] На этапе 606, модуль 112 управления парковкой осуществляет определение одного или нескольких пользователей навигации, пункт назначения которых находится неподалеку от доступного парковочного места. На этапе 608, модуль 112 управления парковкой осуществляет вычисление, для каждого пользователя навигации, вероятности наличия парковки, с которой этот соответствующий пользователь навигации сможет использовать доступное парковочное место. В некоторых аспектах, модуль 112 управления парковкой может вычислять совокупную вероятность на основе по меньшей мере одной из набора вторых вероятностей, связанных с первым парковочным местом и по меньшей мере одной из набора вероятностей наличия парковки, связанных с пользователем навигации. Совокупная вероятность представляет вероятность того, что первое парковочное место доступно и что пользователь навигации займет первое парковочное место.
[93] На этапе 610, модуль 112 управления парковкой осуществляет передачу, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки. В некоторых аспектах, модуль 112 управления парковкой может выбирать подмножества пользователем навигации, обладающих соответствующей вероятностью наличия парковки, связанной с получением доступного парковочного места, которая превышает первое пороговое значение, и передавать уведомление выбранному подмножеству. В других аспектах, модуль 112 управления парковкой может ранжировать пользователей навигации в соответствии с соответствующей вероятностью наличия парковки, связанной с доступным парковочным местом, и передавать уведомление подмножеству ранжированных пользователей навигации.
[94] На Фиг. 7 представлена принципиальная схема компьютерной системы 20 общего назначения, на которой могут быть реализованы аспекты систем и способов определения наличия парковочного места в соответствии с примерным аспектом. Следует отметить, что компьютерная система 20 может соответствовать, например, пользовательским устройствам 102 и серверной системе 110, которые были описаны выше.
[95] Как показано на чертеже, компьютерная система 20 (может быть персональным компьютером или сервером) включает в себя центральный процессор 21, системную память 22 и системную шину 23, соединяющую различные системные компоненты, включая память, связанную с центральным процессором 21. Как будет понятно специалистам в данной области техники, системная шина 23 может включать в себя шину памяти и контролер шины памяти, периферийную шину и локальную шину, которая может взаимодействовать с шиной любой другой архитектуры. Системная память может включать в себя постоянную память (ПЗУ) 24 и оперативную память (ОЗУ) 25. Базовая система ввода/вывода (БИОС) 26 может хранить базовые процедуры для передачи информации между элементами компьютерной системы 20, например, в момент загрузки операционной системы с помощью ПЗУ 24.
[96] Компьютерная система 20 может включать в себя жесткий диск 27 для чтения и записи данных, привод для магнитных дисков 28 для чтения и записи на съемных магнитных дисках 29 и оптический привод 30 для чтения и записи на съемных оптических дисках 31, например, CD-ROM, DVD-ROM и других оптических носителях. Привод 27 жесткого диска, привод 28 магнитного диска и привод 30 оптического диска соединены с системной шиной 23 с помощью интерфейса 32 привода жесткого диска, интерфейса 33 привода магнитного диска и интерфейса 34 привода оптического диска соответственно. Приводы и соответствующие носители компьютерной информации являются энергонезависимыми модулями для хранения компьютерных инструкций, программных модулей и другие данных компьютерной системы 20.
[97] Примерный аспект включает в себя систему, которая использует жесткий диск 27, съемный магнитный диск 29 и съемный оптический диск 31, соединенные с системной шиной 23 с помощью контроллера 55. Специалистам в данной области техники следует иметь в виду, что может использоваться любой тип носителя 56, который способен сохранять данные в форме, читаемой компьютером (твердотельный накопитель, флэш-карта, цифровой диск, ОЗУ и так далее).
[98] Компьютерная система 20 обладает файловой системой 36, в которой может сохраняться операционная система 35, а также дополнительные программные приложения 37, другие программные модули 38 и программные данные 39. Пользователь компьютерной системы 20 может вводить команды и информацию с помощью клавиатуры 40, мыши 42 или любого другого устройства ввода, известного специалистам в данной области техники, например, без установки ограничений, микрофона, джойстика, игрового контроллера и т.д. Подобные устройства ввода обычно подключаются к компьютерной системе 20 через последовательный порт 46, который, в свою очередь, соединен с системной шиной, но специалистам в данной области техники будет ясно, что устройства ввода также могут быть подключены и другими способами, например, без установки ограничений, с помощью параллельного порта, игрового порта или универсальной последовательной шины (USB). Монитор 47 или другой тип устройства отображения может быть соединен с системной шиной 23 через интерфейс, например, видеоадаптер 48. В дополнении к монитору 47, персональный компьютер может включать в себя другие периферические устройства вывода (не показано), например, динамики, принтер и т.д.
[99] Компьютерная система 20 может работать в сетевой среде с помощью сетевого соединения с одним или несколькими удаленными компьютерами 49. Удаленный компьютер (или компьютеры) 49 может представлять собой локальную компьютерную рабочую станцию или серверы, включающие в себя большую часть или все вышеупомянутые элементы при описании природы компьютерной системы 20. Другие устройства могут также присутствовать в компьютерной сети, например, без установки ограничений, роутеры, сетевые станции, одноранговые устройства или другие сетевые ноды.
[100] Сетевые соединения могут образовывать локальные компьютерные сети (LAN) 50 и глобальные компьютерные сети (WAN). Подобные сети используются вместе с компьютерными сетями и внутренними сетями компаний, которые обычно обладают доступом к Интернету. В сетях LAN и WAN, персональный компьютер 20 соединен с локальной сетью 50 через сетевой адаптер или сетевой интерфейс 51. Когда используются сети, компьютерная система 20 может использовать модем 54 или другие модули, хорошо известные специалистам в данной области техники, которые поддерживают передачу данных с глобальной компьютерной сетью, например, сетью Интернет. Модем 54, который может быть внешним или внутренним устройством, может быть соединен с системной шиной 23 через последовательный порт 46. Специалистам в данной области техники будет понятно, что упомянутые сетевые соединения являются неограничивающими примерами многочисленных хорошо известных способов установления соединения одного компьютера с другим с помощью модулей передачи данных.
[101] В различных вариантах осуществления настоящей технологии, системы и способы, описанные здесь, могут быть реализованы на аппаратном обеспечении, прикладном программном обеспечении, системном программном обеспечении или любой из их комбинаций. При реализации в виде прикладного программного обеспечения, способы могут быть сохранены в виде одной или нескольких инструкций или кода на постоянном машиночитаемом носителе. Машиночитаемый носитель включает в себя хранилище данных. В качестве примера, а не ограничения, подобный машиночитаемый носитель может представлять собой ОЗУ, ПЗУ, электрически стираемое программируемое ПЗУ, флэш-память или любой другой тип электрического, магнитного или оптического носителя, или любой другой носитель, который может быть использован для переноса или хранения желаемого программного кода в форме инструкций или структур данных, к которым может обращаться процессор компьютера общего назначения.
[102] В различных аспектах, системы и способы, описанные в настоящей заявке, могут рассматриваться в терминах "модулей". Термин "модуль" в данном контексте означает физическое устройство, компонент или множество компонентов, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функционал модуля, которые (при выполнении) трансформируют микропроцессорную систему в устройство специального назначения. Модуль также может быть реализован в виде комбинации обоих, причем некоторые конкретные функций реализуются за счет аппаратного обеспечения, а другие функции реализуются комбинацией аппаратного и программного обеспечения. В некоторых вариантах осуществления технологии, по меньшей мере, частично, в некоторых случаях модуль может быть реализован на процессоре компьютера общего назначения (например, на таком, который описан подробнее выше на Фиг. 7). Соответственно, каждый модуль может быть реализован в виде множества различных конфигураций и не ограничивается конкретным вариантом осуществления, приведенным здесь в качестве примера.
[103] Для ясности стоит отметить, что здесь описаны не все обычные свойства вариантов осуществления технологии. Следует иметь в виду, что при модификации какого-либо фактического варианта осуществления технологии необходимо принять ряд специфичных для варианта осуществления решений для достижения конкретных целей разработчика, и эти конкретные цели будут отличаться для различных вариантов осуществления и для различных разработчиков. Следует иметь в виду, что подобная разработка может быть сложной и затратной по времени, но, тем не менее, не будет представлять сложности для опытных специалистов в данной области техники, обладающих преимуществом от прочтения настоящего описания.
[104] Кроме того, следует иметь в виду, что фразеология и терминология используется здесь в целях описания, а не ограничения, таким образом, терминология или фразеология настоящего описания должна интерпретироваться специалистами в данной области техники с учетом представленных здесь указаний и руководства в сочетании со знаниями специалистов в соответственной(ых) области(ях) техники. Более того, ни одному термину в описании или формуле не следует приписывать особого или специального значения, если явно не указано иное.
[105] Различные описанные здесь аспекты технологии охватывают нынешние и будущие известные эквиваленты известных модулей, указанных в данном описании в целях иллюстрации. Кроме того, несмотря на представленные и описанные аспекты и приложения, специалистам в данной области техники, обладающим преимуществом от прочтения настоящего описания, будет очевидно, что возможна реализация многих других вышеописанных модификаций без отступления от представленной здесь концепции технологии.
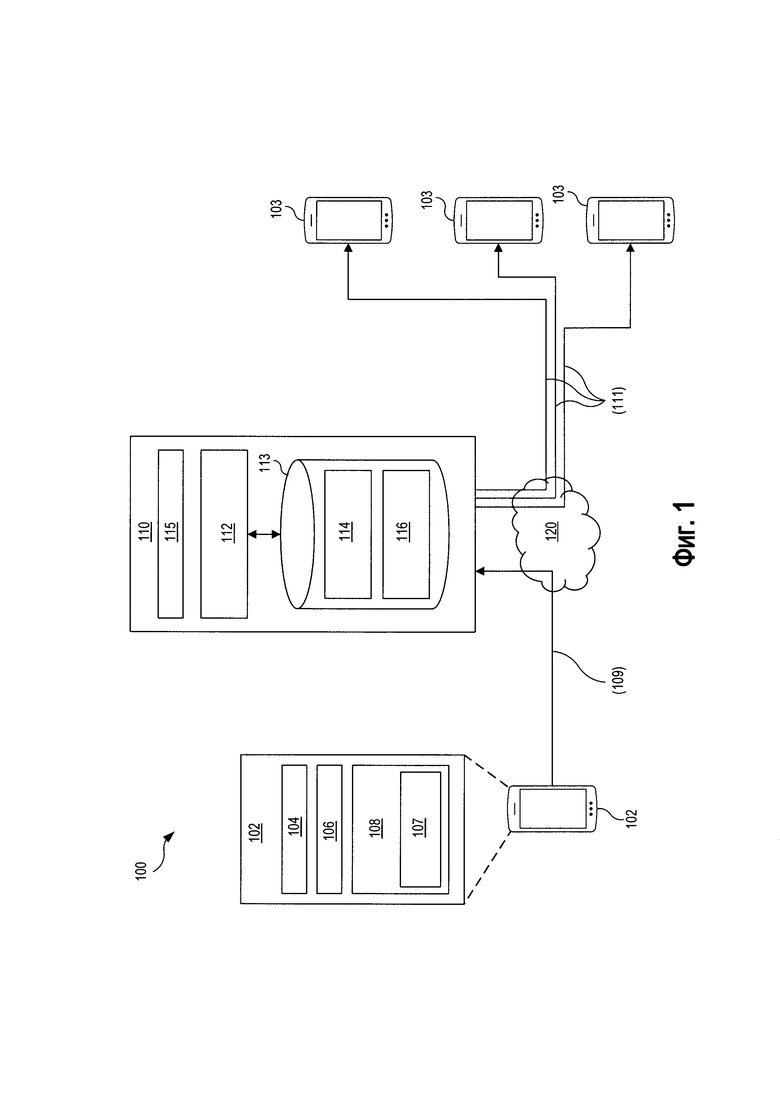
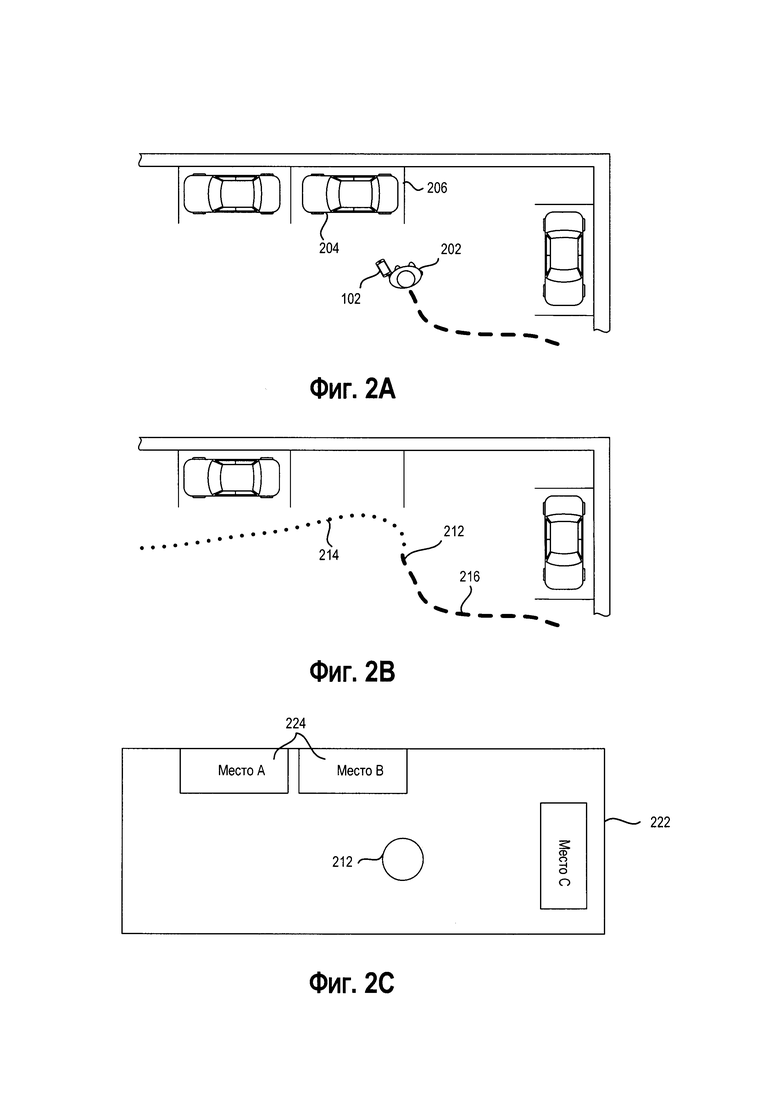

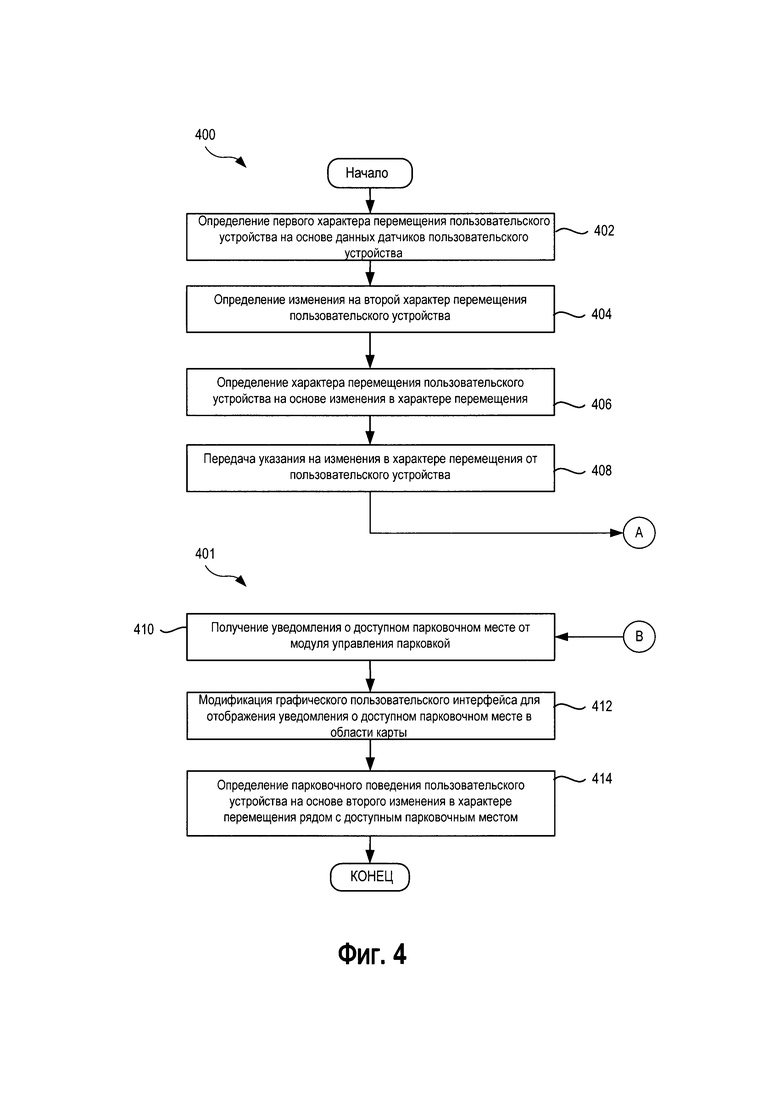
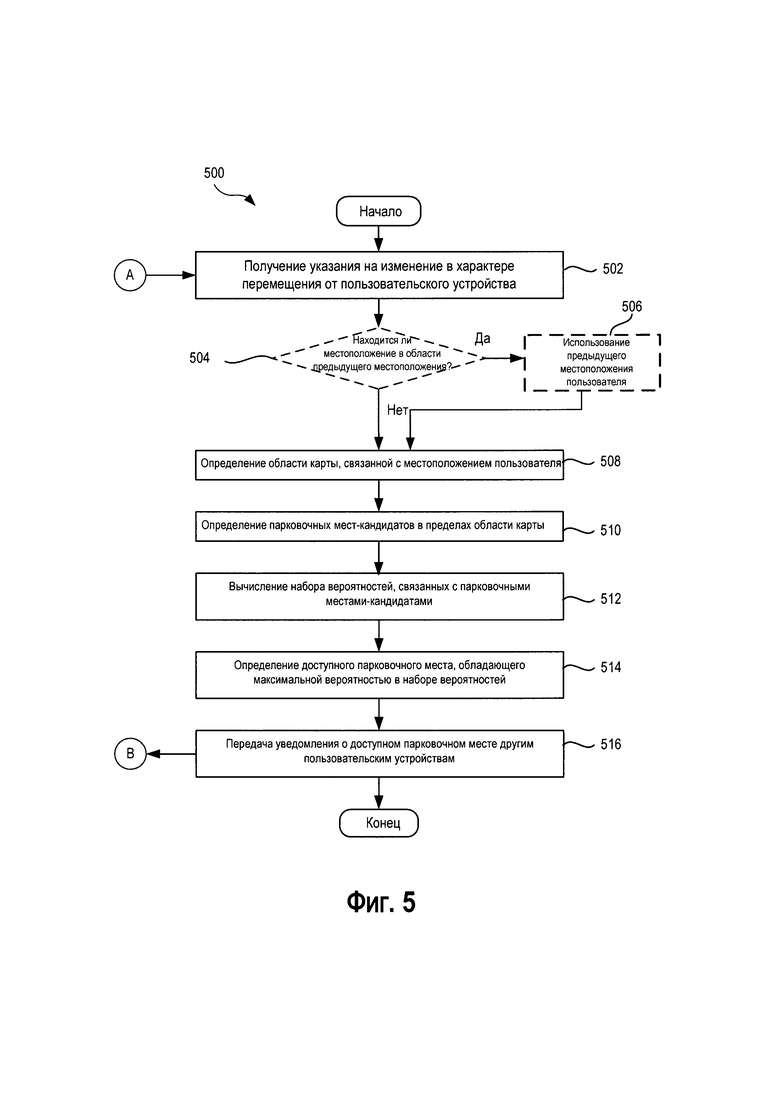


Изобретение относится к области определения наличия парковки. Система и способ для определения наличия парковки включают в себя получение от устройства указания на изменение в характере перемещения, причем указание на изменение в характере перемещения указывает на изменение с первого характера перемещения на второй характер перемещения в первом местоположении, идентификацию с помощью записей о парковочных местах, определение одного или нескольких пользователей навигации, пункт назначения которых находится неподалеку от доступного парковочного места, вычисление, для каждого пользователя навигации, вероятности наличия парковки, с которой этот соответствующий пользователь навигации сможет использовать доступное парковочное место, передачу уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, получение от устройства указания на изменение в характере перемещения в местоположении, идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства, вычисление набора вероятностей, связанных с парковочными местами, определение доступного парковочного места, на основе вычисленной максимальной вероятности из набора вероятностей, и передачу уведомления о доступном парковочном месте на другие устройства. Достигается определения наличия индивидуальных парковочных мест. 4 н. и 22 з.п. ф-лы, 7 ил.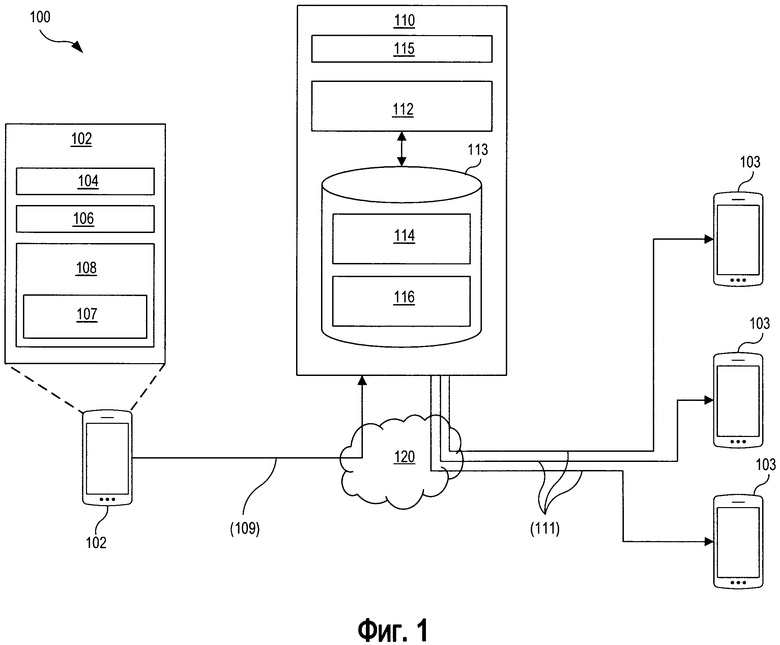
1. Исполняемый на компьютере способ управления доступом к парковке, включающий в себя:
получение от устройства указания на изменение в характере перемещения, связанное с первым пользователем, причем указание на изменение в характере перемещения указывает на изменение с первого характера перемещения на второй характер перемещения в первом местоположении;
идентификацию с помощью записей о парковочных местах, хранящихся в базе данных, доступного парковочного места на основе полученного указания на изменение характера перемещения;
определение одного или нескольких пользователей навигации, пункт назначения которых находится неподалеку от доступного парковочного места;
вычисление, для каждого пользователя навигации, вероятности наличия парковки, с которой этот соответствующий пользователь навигации сможет использовать доступное парковочное место; и
передачу, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки.
2. Способ по п. 1, в котором идентификация первого парковочного места, которое стало доступно на основе полученного указания на изменение в характере перемещения, далее включает в себя:
идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства;
вычисление набора вторых вероятностей, связанных с парковочными местами, каждая вероятность из набора вторых вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате;
идентификацию доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вторых вероятностей.
3. Способ по п. 2, в котором вычисление набора вторых вероятностей, связанных с парковочными местами-кандидатами, основано по меньшей мере на одном из наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
4. Способ по п. 2, дополнительно включающий в себя
вычисление суммарной вероятности на основе по меньшей мере одной из набора вторых вероятностей, связанных с первым парковочным местом, и по меньшей мере одной из набора вероятностей наличия парковки, связанных с пользователем навигации, причем суммарная вероятность представляет собой вероятность того, что первое парковочное место доступно и что пользователь навигации займет первое парковочное место.
5. Способ по п. 1, в котором передача, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, далее включает в себя:
выбор подмножества пользователей навигации, обладающих соответствующими вероятностями наличия парковки в отношении использования доступного парковочного места, которые превышают первое пороговое значение; и
передачу уведомления выбранному подмножеству.
6. Способ по п. 1, в котором передача, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, далее включает в себя:
ранжирование пользователей навигации в соответствии с соответствующими вероятностями наличия парковки в отношении использования доступного парковочного места и
передачу уведомления подмножеству ранжированных пользователей навигации.
7. Система для управления доступом к парковке, система включает в себя: аппаратный процессор, выполненный с возможностью осуществлять:
получение от устройства указания на изменение в характере перемещения, связанное с первым пользователем, причем указание на изменение в характере перемещения указывает на изменение с первого характера перемещения на второй характер перемещения в первом местоположении;
идентификацию с помощью записей о парковочных местах, хранящихся в базе данных, доступного парковочного места на основе полученного указания на изменение характера перемещения;
определение одного или нескольких пользователей навигации, пункт назначения которых находится неподалеку от доступного парковочного места;
вычисление, для каждого пользователя навигации, вероятности наличия парковки, с которой этот соответствующий пользователь навигации сможет использовать доступное парковочное место; и
передачу, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки.
8. Система по п. 7, в которой процессор, который выполнен с возможностью идентификации первого парковочного места, которое стало доступно на основе полученного указания на изменение в характере перемещения, далее выполнен с возможностью осуществлять:
идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства;
вычисление набора вторых вероятностей, связанных с парковочными местами, каждая вероятность из набора вторых вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате;
идентификацию доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вторых вероятностей.
9. Система по п. 8, в которой процессор выполнен с возможностью осуществлять вычисление набора вторых вероятностей, связанных с парковочными местами-кандидатами, основано по меньшей мере на одном из наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
10. Система по п. 8, в которой процессор выполнен с дополнительной возможностью осуществлять:
вычисление суммарной вероятности на основе по меньшей мере одной из набора вторых вероятностей, связанных с первым парковочным местом, и по меньшей мере одной из набора вероятностей наличия парковки, связанных с пользователем навигации, причем суммарная вероятность представляет собой вероятность того, что первое парковочное место доступно и что пользователь навигации займет первое парковочное место.
11. Система по п. 7, в которой процессор, который выполнен с возможностью осуществлять передачу, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, далее выполнен с возможностью осуществлять:
выбор подмножества пользователей навигации, обладающих соответствующими вероятностями наличия парковки в отношении использования доступного парковочного места, которые превышают первое пороговое значение; и
передачу уведомления выбранному подмножеству.
12. Система по п. 7, в которой процессор, который выполнен с возможностью осуществлять передачу, по меньшей мере одному из пользователей навигации, уведомления о доступном парковочном месте в соответствии с вычисленными вероятностями наличия парковки, далее выполнен с возможностью осуществлять:
ранжирование пользователей навигации в соответствии с соответствующими вероятностями наличия парковки в отношении использования доступного парковочного места и
передачу уведомления подмножеству ранжированных пользователей навигации.
13. Исполняемый на компьютере способ управления доступом к парковке, включающий в себя:
получение от устройства указания на изменение в характере перемещения, связанное с пользователем устройства, причем указание на изменение в характере перемещения указывает на изменение с первого характера перемещения, связанного с пользователем, на второй характер перемещения, связанный с пользователем, в местоположении;
идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства;
вычисление набора вероятностей, связанных с парковочными местами, каждая вероятность из набора вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате;
определение доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вероятностей и
передачу уведомления о доступном парковочном месте на другие устройства.
14. Способ по п. 13, в котором идентификация одного или нескольких парковочных мест-кандидатов включает в себя:
определение области карты, связанной с местоположением изменения в характере перемещения; и
идентификацию парковочных мест-кандидатов, находящихся в данной области карты.
15. Способ по п. 13, в котором изменение в характере перемещения определяется на основе шаблона характера из множества заранее определенных шаблонов характера.
16. Способ по п. 13, в котором изменение в характере перемещения указывает на изменение с первого характера перемещения - ходьбы пешком - на второй характер перемещения - вождение.
17. Способ по п. 13, дополнительно включающий в себя:
определение местоположения изменения в характере перемещения как находящегося в пределах заранее определенной области по меньшей мере одного местоположения, связанного с устройством; и
в ответ на определение того, что местоположение находится за пределами заранее определенной области, настройку местоположения изменения в характере перемещения с помощью по меньшей мере одного предыдущего местоположения, связанного с устройством.
18. Способ по п. 13, в котором вычисление набора вероятностей, связанных с парковочными местами-кандидатами, основано по меньшей мере на одном из наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
19. Способ по п. 13, в котором передача уведомления о доступном парковочном месте на другое устройство включает в себя:
идентификацию набора других устройств с маршрутами, пункты назначения которых находятся поблизости от местоположения доступного парковочного места; и
передачу уведомления идентифицированным другим устройствам.
20. Система для определения наличия парковки, система включает в себя: аппаратный процессор, выполненный с возможностью осуществлять:
получение от устройства указания на изменение в характере перемещения, связанное с пользователем устройства, причем указание на изменение в характере перемещения указывает на изменение с первого характера перемещения, связанного с пользователем, на второй характер перемещения, связанный с пользователем, в местоположении;
идентификацию одного или нескольких парковочных мест-кандидатов на основе местоположения изменения характера перемещения, связанного с пользователем устройства;
вычисление набора вероятностей, связанных с парковочными местами, каждая вероятность из набора вероятностей указывает на доверительный уровень того, что местоположение изменения в характере перемещения находится на соответствующем парковочном месте-кандидате;
определение доступного парковочного места, связанного с изменением в характере перемещения, на основе вычисленной максимальной вероятности из набора вероятностей; и
передачу уведомления о доступном парковочном месте на другие устройства.
21. Система по п. 20, в которой процессор, который дополнительно выполнен с возможностью идентифицировать одно или несколько парковочных мест-кандидатов, далее выполнен с возможностью осуществлять:
определение области карты, связанной с местоположением изменения в характере перемещения; и
идентификацию парковочных мест-кандидатов, находящихся в данной области карты.
22. Система по п. 20, в которой изменение в характере перемещения определяется на основе шаблона характера из множества заранее определенных шаблонов характера.
23. Система по п. 20, в которой изменение в характере перемещения указывает на изменение с первого характера перемещения - ходьбы пешком - на второй характер перемещения - вождение.
24. Система по п. 20, в которой процессор выполнен с дополнительной возможностью осуществлять:
определение местоположения изменения в характере перемещения как находящегося в пределах заранее определенной области по меньшей мере одного местоположения, связанного с устройством; и
в ответ на определение того, что местоположение находится за пределами заранее определенной области, настройку местоположения изменения в характере перемещения с помощью по меньшей мере одного предыдущего местоположения, связанного с устройством.
25. Система по п. 20, в которой процессор выполнен с возможностью осуществлять вычисление набора вероятностей, связанных с парковочными местами-кандидатами, основано по меньшей мере на одном из наборов факторов, включающих в себя размер парковки, расстояние между парковочным местом и местоположением изменения в характере перемещения, тип парковки, число раз, когда другие пользователи были связаны с этим парковочным местом, и число ранее зафиксированных местоположений, которые были связаны с соответствующим парковочным местом в предыдущий период времени.
26. Система по п. 20, в которой процессор, который дополнительно выполнен с возможностью передавать уведомление о доступном парковочном месте другим устройствам, далее выполнен с возможностью осуществлять:
идентификацию набора других устройств с маршрутами, пункты назначения которых находятся поблизости от местоположения доступного парковочного места; и
передачу уведомления идентифицированным другим устройствам.
| RU 2015115745 A, 20.11.2016 | |||
| US 2017219369 A1, 03.08.2017 | |||
| WO 2016088069 A2, 09.06.2016. |

