Изобретение относится к устройствам для резания различных материалов, например металлов, и может быть использовано в ножовочных пилах.
Известна ножовочная пила по патенту США № 4550501, В27В 11/02, содержащая: привод, одноступенчатую зубчатую понижающую передачу, устройство для получения качательных движений штока и механизм для его возвратно-поступательных движений.
Известна ножовочная пила по патенту США № 488343, В23В 49/04, содержащая: привод, одноступенчатую зубчатую угловую передачу, устройство для получения возвратно-поступательных движений штока.
Известна ножовочная пила по патенту США № 5392519, В27В 11/02, содержащая те же самые основные узлы, перечисленные в двух вышеупомянутых патентах.
Известна лобзиковая пила по патенту США № 5644846, В27В 11/02, содержащая: привод, цилиндрическую одноступенчатую понижающую зубчатую передачу, устройство для управления поперечными движениями пильного полотна и механизм для его возвратно-поступательных движений.
Известна ножовочная пила по авторскому свидетельству СССР № 181955 А, В23D 29/00, опубликованному 20.06.1966, взятая в качестве прототипа, содержащая пильное полотно, кривошипный механизм для возвратно-поступательного движения пильного полотна, привод с гибким приводным валом.
Все перечисленные пилы, включая прототип, рассчитаны, в основном, для резания древесины и подобных ей по прочности материалов. Эти пилы обладают следующими недостатками при резании металлов: небольшой ход пильного полотна, большая скорость его возвратно-поступательных и качательных перемещений, отрицательно влияющая на стойкость инструмента, применение специальных толстых полотен и, как следствие, появление больших усилий резания. Наличие электропривода, закрепленного на корпусе пилы, делает работу в условиях повышенной влажности и дождя небезопасной в части электрозащиты.
Задачей заявляемого изобретения является исключение всех вышеперечисленных недостатков при резании металлов и других материалов.
Для решения этой задачи ножовочная пила согласно изобретению оснащена устройством для изменения длины хода пильного полотна, а приводной вал состоит из гибких брони и сердечника, причем броня с обеих сторон заканчивается сборочными узлами для присоединения к корпусам привода и пилы, при этом между гибким приводным валом и кривошипным механизмом для ограничения вращающего момента установлена предохранительная муфта проскальзывания или фрикционный одноступенчатый планетарный редуктор с тремя сателлитами, один из которых выполнен пружинным.
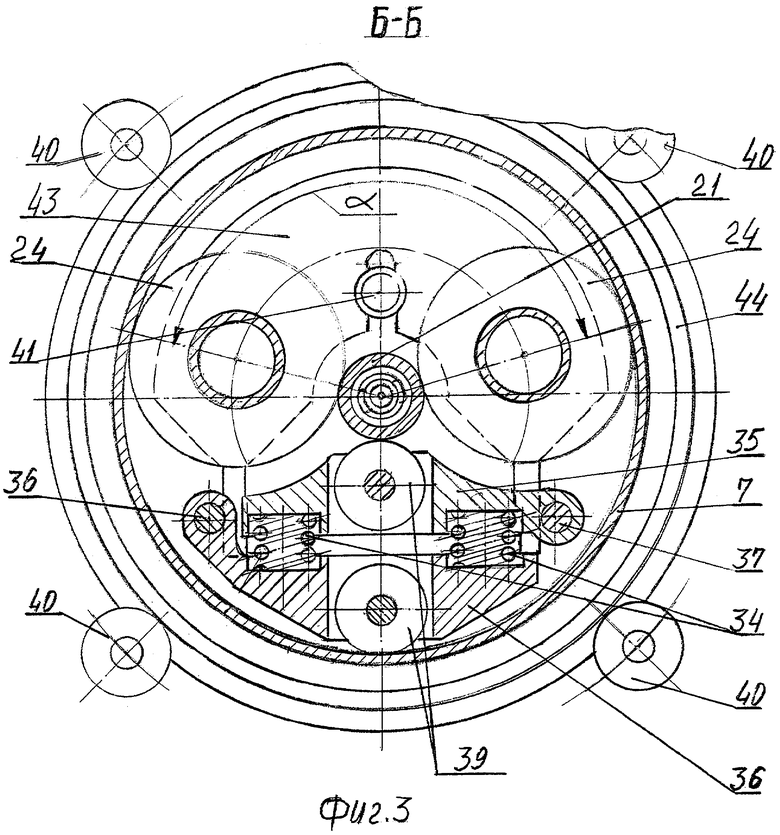
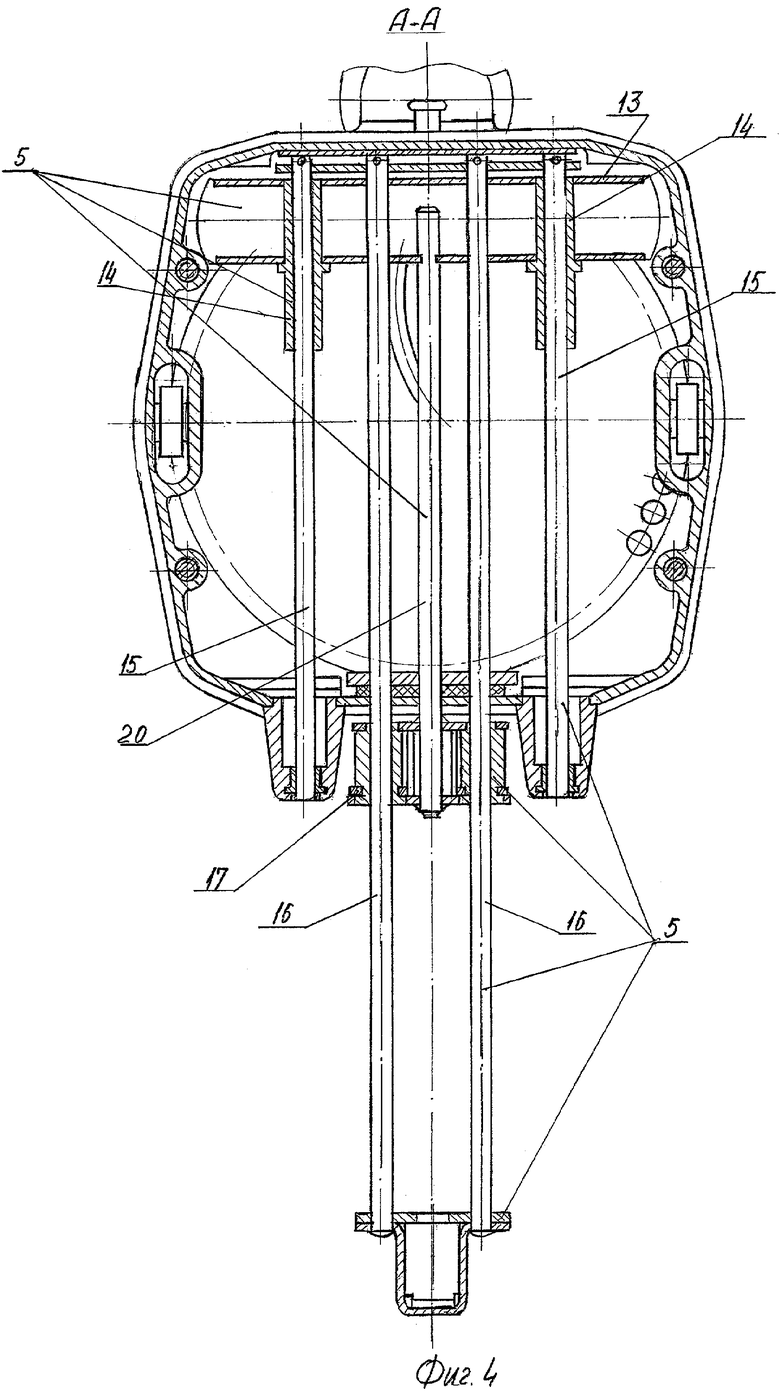
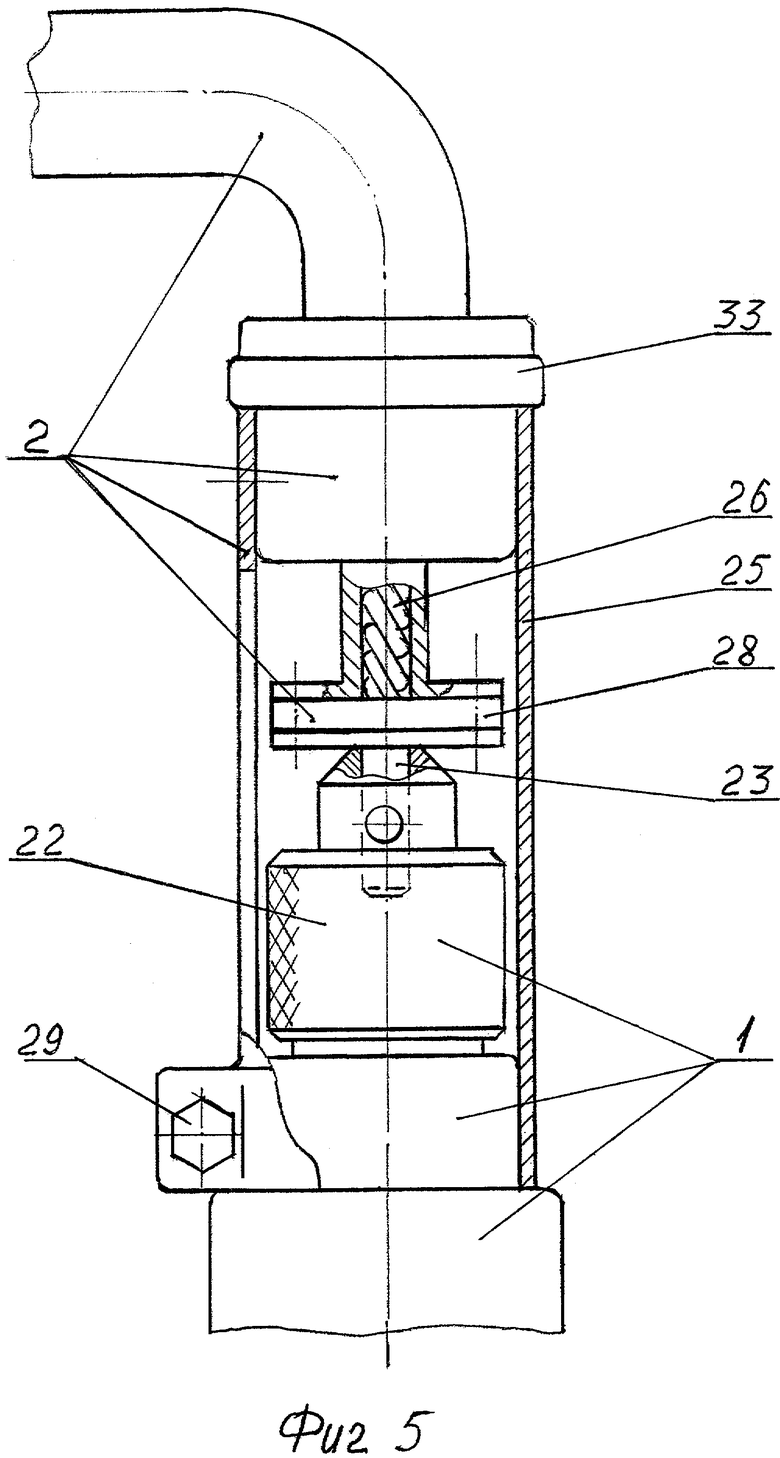
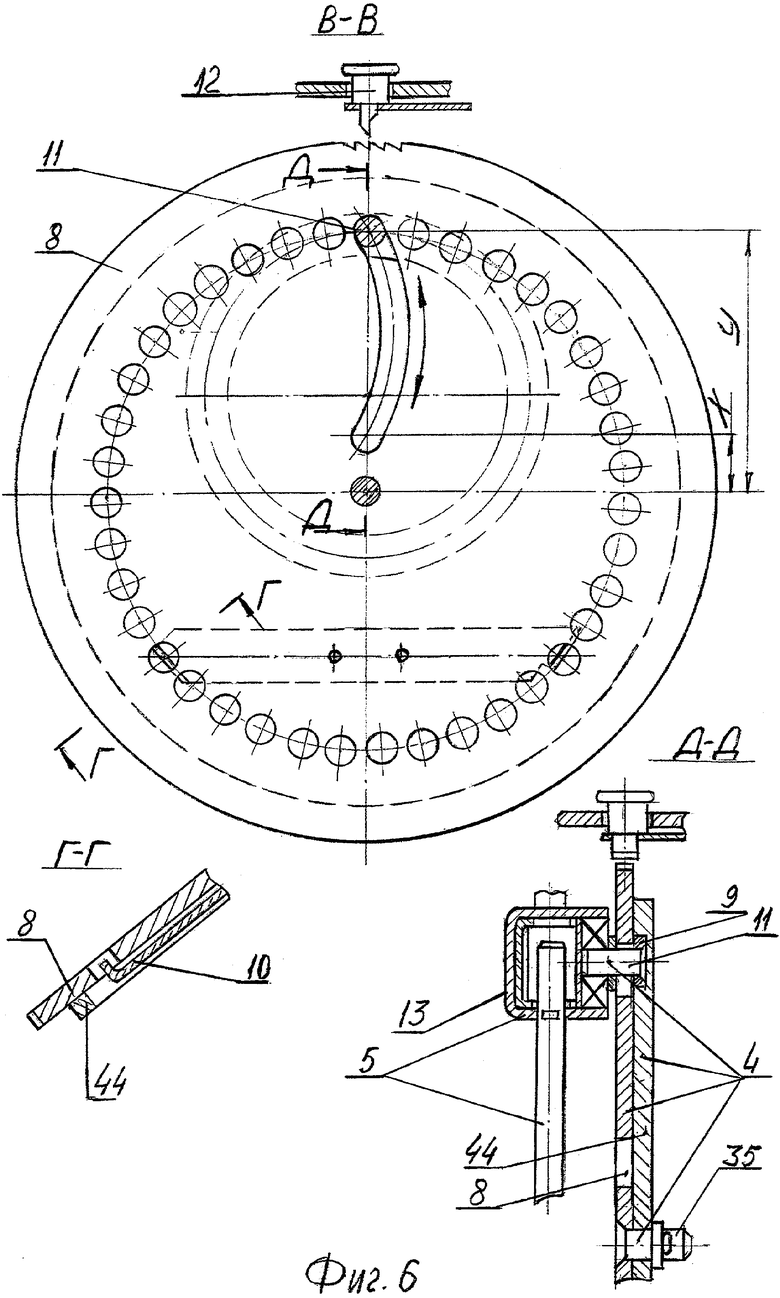
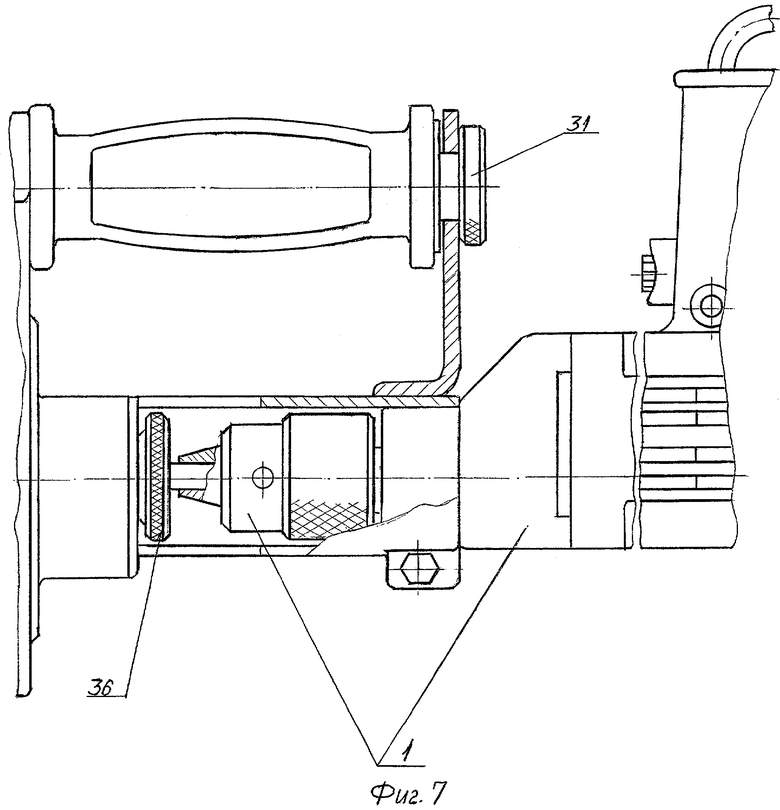
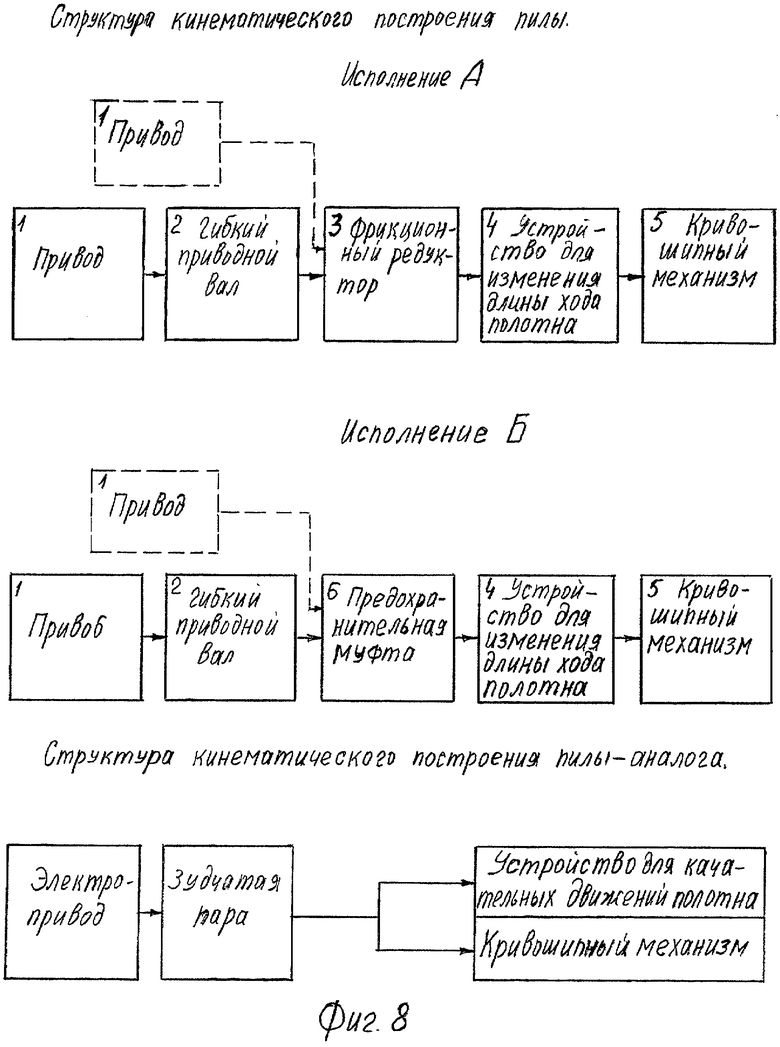
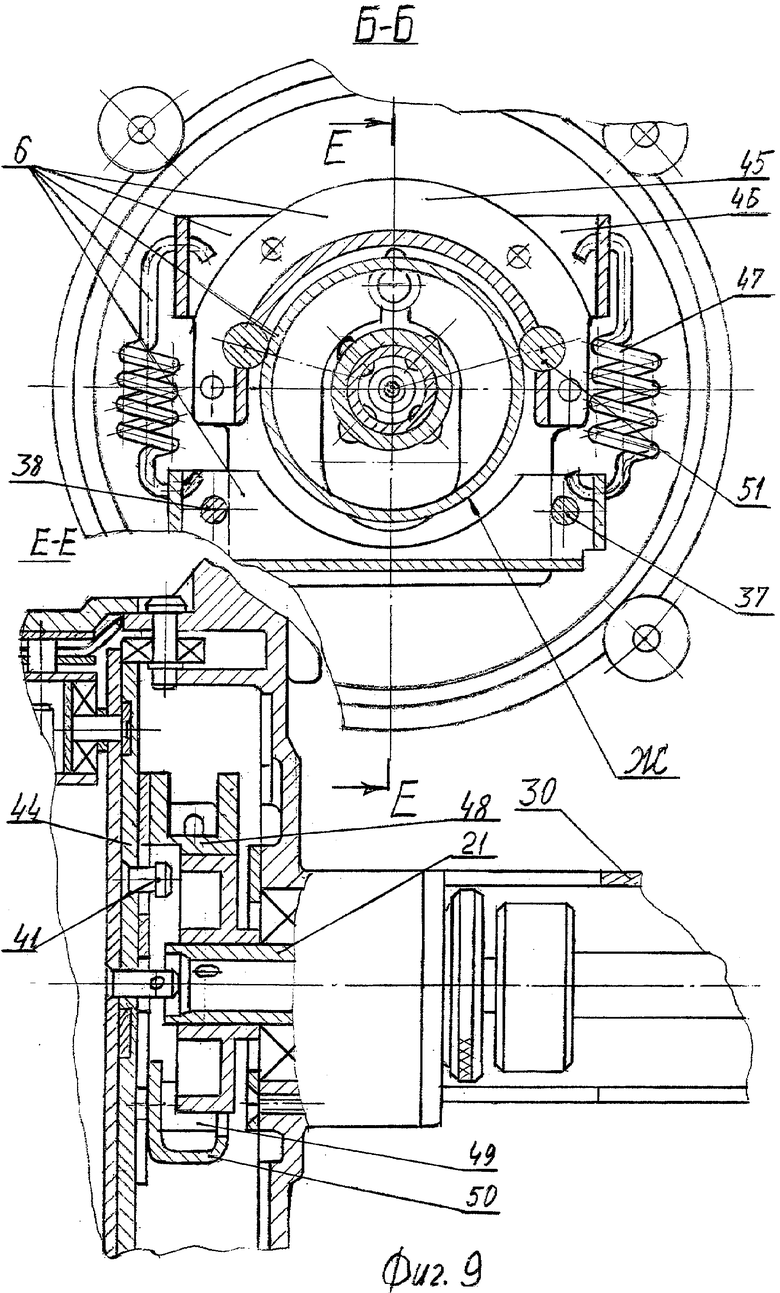
Структура кинематического построения аналога показана на Фиг.8 и включает в себя: электропривод, зубчатую понижающую пару, механизм для получения качательных движений пильного полотна механизм для получения его возвратно-поступательных движений. Структурное кинематическое построение вновь предлагаемой пилы имеет два исполнения: А и Б, Фиг.8. Исполнение А включает в себя: привод 1, длинный гибкий приводной вал 2, одноступенчатый фрикционный планетарный редуктор 3, устройство для изменения длины хода пильного полотна 4 и механизм для его возвратно-поступательных движений 5. Этот механизм в дальнейшем будет называться кривошипным. Исполнение Б включает в себя: привод 1, длинный гибкий приводной вал 2, предохранительную муфту проскальзывания 6, устройство 4 для изменения длины хода пильного полотна кривошипный механизм 5, т.е. вместо фрикционного редуктора в исполнении А в исполнении Б применена предохранительная муфта проскальзывания. В общем случае, линейная скорость пильного полотна и его усилие резания для двух исполнений одни и те же. В сравнении эти исполнения имеют положительные и отрицательные конструктивные и эксплуатационные качества. Для исполнения А положительно: небольшой, передаваемый гибким валом момент, что позволяет применять тонкий сердечник и броню меньшего сечения, редуктор резко увеличивает момент, передаваемый на кривошипный механизм, и уменьшает угловую скорость, максимально используется полезная мощность ручной сверлильной электрической машины, применяемой в качестве привода. Для исполнения А отрицательно: тепловыделения от примененного фрикционного редуктора требуют применения теплоотвода - металлического корпуса пилы, большая угловая скорость сердечника гибкого вала увеличивает износ его брони, увеличен износ центрального вала 21 пилы. Для исполнения Б положительно: упрощенная конструкция пилы и возможность изготовления ее корпуса из пластмассы, т.к. тепловыделение незначительно, уменьшение веса корпуса, небольшая угловая скорость сердечника гибкого вала увеличивает срок службы его брони, незначителен износ центрального вала 21 пилы. Для исполнения Б отрицательно: увеличение диаметра сердечника гибкого вала, что увеличивает поперечное сечение брони и вес вала, уменьшение или регулирование угловой скорости гибкого вала ведет к усложнению конструкции привода и ограничению возможности использования ручной электрической сверлильной машины в качестве привода. В сравнении с прототипом, из конструкции пилы исключены: электропривод, зубчатая пара и устройство по управлению качательным движением полотна. Вращательное движение пила получает от гибкого вала, а в качательном движении пильного полотна нет необходимости т.к. стружка хорошо удаляется при достаточном ходе и длине полотна. Изобретение со структурой кинематического построения по исполнению А поясняется чертежами, представленными на Фиг.1, 2, 3, 4, 5, 6, 7, 8. Структура кинематического построения по исполнению Б поясняется чертежами, представленными на фиг.1, 2, 3, 4, 5, 6, 7, 9. На фиг.1 и 5 изображено основное осевое сечение пилы, на Фиг.2 показано схематичное изображение редуктора, на Фиг.3 - разрез Б-Б осевого сечения пилы исполнения А, на Фиг.4 - кривошипный механизм, на Фиг.5 - стыковка привода и гибкого вала, на Фиг.6 - устройство для изменения длины хода полотна, на Фиг.7 изображена стыковка привода непосредственно с пилой, на Фиг.8 представлены структурные кинематические построения предлагаемой пилы и ее аналога, на Фиг.9 - разрез Б-Б осевого сечения пилы исполнения Б, привод пилы - соответствующей мощности ручная сверлильная электрическая машина 1, Фиг.5 или какое-либо устройство-привод, имеющее патрон для закрепления входного наконечника 23 и втулки-хомута 25 брони гибкого вала, Фиг.5. Вращательное движение гибкого вала 2, Фиг.1, Фиг.5, передается на планетарный редуктор пилы исполнения А или на предохранительную муфту пилы исполнения Б, далее на кривошип 11, входящий в устройство 4 изменения длины хода тяги 20, Фиг.1, 6. Кривошипный механизм 5, Фиг.4, 6, преобразовывает движение в возвратно-поступательное непосредственно пильного полотна. Гибкий вал 2 состоит из сердечника и брони. Сердечник передает вращение на вал 21, Фиг.1 пилы. Броня - защитная оболочка, предназначенная для защиты от захвата вращением каких-нибудь посторонних предметов и одежды обслуживающего персонала. Броня, как и сердечник, является гибкой, с обеих сторон она заканчивается арматурой, т.е. сборочными узлами, предназначенными для присоединения к корпусам привода и пилы. В состав сердечника входят: входной наконечник 23, изоляционная шайба 28, Фиг.5, гибкий проволочный сердечник 26, выходной наконечник 27, Фиг.1, с крепежными болтами. Арматура брони для присоединения к приводу имеет втулку-хомут 25 с болтовым зажимом и наконечник 52, Фиг.1. Сердечник и броня электрически изолированы от привода деталями 28 и 33. Остальные детали гибкого вала не показаны. Размеры посадочных диаметров хомута-втулки 25 брони и хомута 30 корпуса пилы унифицированы, что позволяет присоединить ручную электрическую сверлильную машину непосредственно к пиле, Фиг.1, 7. На фигуре 8, привод поз.1, присоединенный по данному варианту, обведен пунктиром. В корпусе 42 шины размещены: редуктор или предохранительная муфта, механизм изменения хода пилы, кривошипный механизм. В пиле по исполнению А применен фрикционный одноступенчатый планетарный редуктор с тремя сателлитами, один из которых пружинный. Конструкция редуктора 3 предоставлена на Фиг.1, 2, 3. Подвижным центральным валом является вал 21, наружным неподвижным колесом - пружинный, состоящий из: двух подшипников 39 с осями, двух рычагов 35 и 36, двух осей 37 и 38 и двух пружин 34. Водило в этом редукторе - плата 43 и связанный с ней диск 44. В диске 44 жестко закреплены оси 37, 38, 41, через которые на него передается вращающий момент от сателлитов. Необходимые усилия между сателлитами 24 и центральным валом 21, а также между сателлитами 24 и неподвижным наружным центральным колесом 7 создаются пружинным сателлитом, т.е. двумя пружинами 34, установленными в гнездах рычагов 35 и 36, которые могут проворачиваться в осях 37 и 38 соответственно. В этих же рычагах установлены подшипники 39, через которые оказывается силовое воздействие на вал 21 и чашку 7 редуктора. Больший угол между сателлитами 24 позволяет применить пружины с меньшим рабочим усилителем и меньших габаритов. Применение редуктора данной конструкции позволяет ограничивать максимальное усилие резания полотна, т.к. редуктор выполняет и функцию предохранительной муфты проскальзывания, т.е. максимальное усилие резания находится в прямой зависимости от осевого усилия пружин. Редуктор может передавать определенный максимальный вращающий момент. Вал 21 будет проскальзывать при превышении некоторого предела усилия при резании, заклинивании пильного полотна и при применении приводов большой мощности. Планетарный редуктор резко снижает угловую скорость кривошипа 11 и естественно линейную скорость полотна. Ограниченное максимальное усиление резания, плавность хода и сравнительно небольшая линейная скорость полотна позволяют применять узкие по толщине полотна с мелким зубом, включая полотна для ручных ножовок. В исполнении Б вместо редуктора в том же объеме размещается предохранительная муфта проскальзывания 6, Фиг.9. В ее состав входят детали: 45 - обойма, 46 - плата, 47 - две пружины, 48 - колесо, 49 - втулка, 50 - плата, 51 - два ролика. Они крепятся на неподвижно закрепленных на диске 44 штырях 37, 38, 41. На вал 21 крепится колесо 48, к цилиндрической поверхности которого прижаты два ролика 51. Необходимое рабочее усилие создается двумя пружинами 47, пила имеет увеличенный ход пильного полотна и в целях расширения ее производственных возможностей в ней предусмотрено устройство изменения длины хода пильного полотна. В это устройство 4, Фиг.6, входят: диск 44 с пружиной-собачкой 10, подвижное кольцо 9 с кривошипом 11, храповое колесо 8 и подпружиненная кнопка 12. Рабочее направление вращение вала 21 по часовой стрелке, если смотреть со стороны гибкого вала, Фиг.1. В положении кривошипа 11, как показано на Фиг.1, 6 - максимальный ход ползуна 13 и полотна. Для уменьшения длины хода необходимо зафиксировать кнопкой 12 храповое колесо 8 и проворачивать втулку 36 или гибкий вал 2 против часовой стрелки. Диск 44 и храповое колесо закреплены на общей оси 35, но т.к. колесо 8 зафиксировано, то провернуться против часовой стрелки может только диск 44 вместе с закрепленной на нем пружиной-собачкой 10 и расположенным в его кольцевой проточке подвижным кольцом 9. Кривошип 11, неподвижно закрепленный на кольце 9, с небольшим зазором ходит в дугообразном пазе храпового колеса и может перемещаться по пазу при повороте диска 44 против часовой стрелки при неподвижном колесе 8. Колесо 8 и диск 44 дополнительно выполняют роль маховика, сглаживающего неравномерность хода. На разрезе В-В, Фиг.6, направление перемещения кривошипа показано стрелкой. Как видно из рисунка максимальный ход ползуна 13 равен 2У, а минимальный - 2Х. В отпущенном состоянии подпружиненная кнопка 12 поднимается и освобождает храповое колесо 8. Кривошипный механизм 5 представлен на Фиг.1 и Фиг.4. В его состав входят детали: ползун 13, кривошип 11, втулки 14, направляющие стержни 16 для держателя полотна 17. Для уменьшения габаритов корпуса направляющие втулки закреплены непосредственно в ползуне, Фиг.4. Держатель 17 жестко связан с тягой 20. Детали 18, 19 предназначены для направления полотна. Конструкция держателя 17 Фиг.1 позволяет закрепить пильное полотно в любом месте, т.е. сдвигать его в держателе по мере срабатывания зубцов или использовать часть сломанного полотна, если его длина достаточна для закрепления и рабочего хода. Винт 31 - ключ для всех болтов пилы. Хранится он ввернутым в ручку 32 пилы. Пила позволяет производить слесарные работы: с возможностью применения всех типов полотен для ручных ножовок или подобных им, с использованием регулирования длины хода полотна, в узких и неудобных местах, с небольшим усилием резания, в местах с повышенной влажностью и в воде. Работы по последнему пункту можно выполнять, если длина гибкого вала позволяет удалить электропривод на безопасное расстояние от влажной зоны и воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОЖОВОЧНАЯ ПИЛА | 1998 |
|
RU2153959C2 |
| Лобзиковая пила с возвратно-поступательным движением пильного полотна | 2023 |
|
RU2810592C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1993 |
|
RU2084331C1 |
| НОЖОВОЧНАЯ ПИЛА | 2020 |
|
RU2743368C1 |
| Ножовочный отрезной станок | 1981 |
|
SU1114501A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| СТАНОК ДЛЯ РАСПИЛОВКИ ЛЕСОМАТЕРИАЛОВ | 2013 |
|
RU2531690C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| СПОСОБ РЕЗКИ РЕЛЬСОВ ЛЕЗВИЙНОЙ ПИЛОЙ | 2002 |
|
RU2239685C2 |
| ЛЕСОПИЛЬНАЯ РАМА | 2014 |
|
RU2557181C1 |

Изобретение относится к ножовочным пилам. Пила с гибким валом содержит пильное полотно, кривошипный механизм для возвратно-поступательного движения пильного полотна, привод с гибким приводным валом. Пила оснащена устройством для изменения длины хода пильного полотна. Приводной вал состоит из гибких брони и сердечника, причем броня с обеих сторон заканчивается сборочными узлами для присоединения к корпусам привода и пилы. Между гибким приводным валом и кривошипным механизмом для ограничения вращающего момента установлена предохранительная муфта проскальзывания или фрикционный одноступенчатый планетарный редуктор с тремя сателлитами, один из которых выполнен пружинным. Изобретение расширяет область применения ножовочных полотен. 9 ил.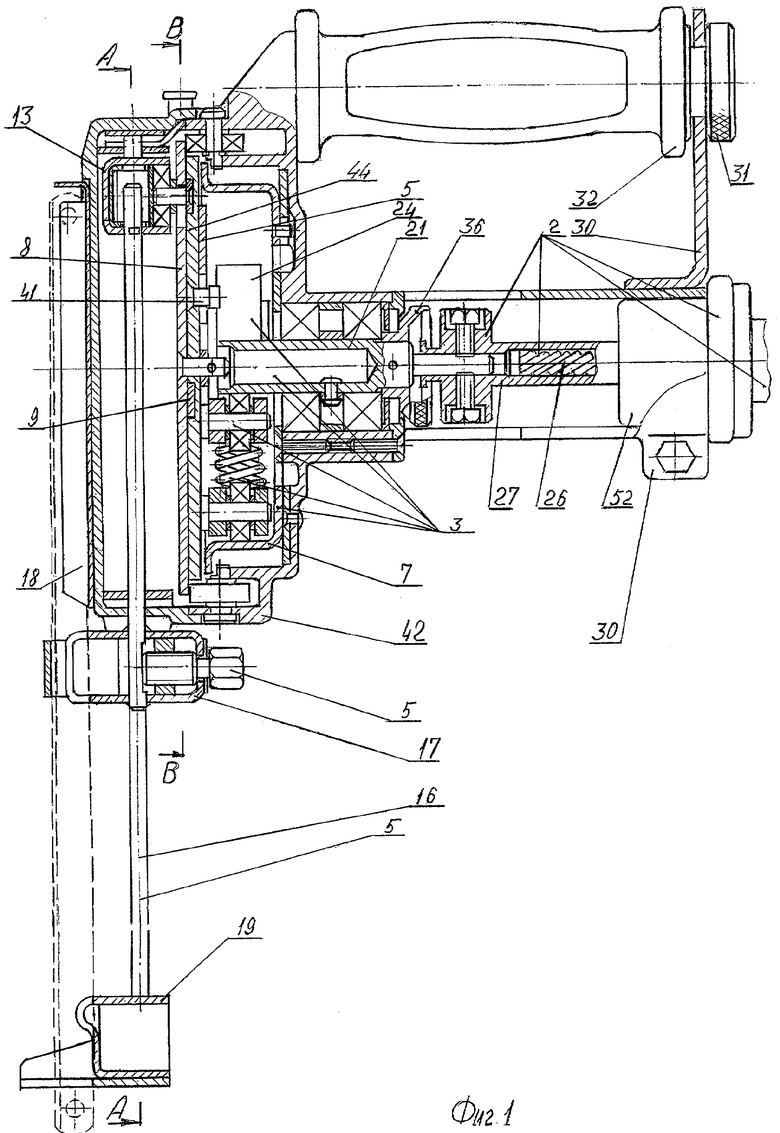
Ножовочная пила с гибким валом, содержащая пильное полотно, кривошипный механизм для возвратно-поступательного движения пильного полотна, привод с гибким приводным валом, отличающаяся тем, что она оснащена устройством для изменения длины хода пильного полотна, а приводной вал состоит из гибких брони и сердечника, причем броня с обеих сторон заканчивается сборочными узлами для присоединения к корпусам привода и пилы, при этом между гибким приводным валом и кривошипным механизмом для ограничения вращающего момента установлена предохранительная муфта проскальзывания или фрикционный одноступенчатый планетарный редуктор с тремя сателлитами, один из которых выполнен пружинным.
| ПЕРЕНОСНАЯ МЕХАНИЧЕСКАЯ ПИЛА | 0 |
|
SU181955A1 |
| НОЖОВОЧНАЯ ПИЛА | 1998 |
|
RU2153959C2 |
| Безмоторная электропила ножовочного типа | 1949 |
|
SU81204A1 |
| 0 |
|
SU402430A1 | |
| Предохранительная муфта | 1978 |
|
SU773328A1 |
| US 4884344 А, 05.12.1989. | |||

