Изобретение относится к технике добычи нефти из скважин и может быть использовано в приводах станков-качалок для преобразования вращательного движения в возвратно-поступательное.
Известен кривошипный механизм для преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение подвески устьевого штока в балансирных приводах штанговых скважинных насосов (ГОСТ 51763-2001. Приводы штанговых скважинных насосов. Общие технические требования. ГОССТАНДАРТ РОССИИ, Москва, с.3, рис.1) [1]. Этот механизм состоит из кривошипов с уравновешивающими грузами, которые установлены на выходном валу редуктора с двух сторон, и шарнирно связанных с ними шатунов, которые через траверсу связаны с подвижно установленным на стойке двуплечим качающимся балансиром с головкой балансира, на которой закреплен гибкий элемент.
Недостатком такого преобразующего механизма является то, что он имеет сравнительно большой угол качания шатунов и поэтому, кроме полезной нагрузки, тягового усилия на штоках, он создает также значительную знакопеременную горизонтальную силу, действующую через балансир на стойку, которая раскачивает конструкцию, ослабляет крепежные соединения. Кроме того, такой кривошипный механизм обеспечивает длину хода подвески устьевого штока при равноплечем балансире, незначительно превышающую удвоенное значение радиуса кривошипа. Поэтому для увеличения длины хода применяют балансир с увеличенной длиной плеча со стороны подвески устьевого штока и меньшей со стороны редуктора, что неблагоприятно для конструкции, так как значительно возрастает требуемое тяговое усилие на шатунах.
Известен также дифференциальный кривошипный механизм привода штангового скважинного насоса для преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение подвески устьевого штока (Колошко В.П., Колошко В.В. Патент на изобретение RU 2246650 С2, «Дифференциальный кривошипный механизм привода штангового скважинного насоса», опубликован 20.05.2005, Бюл. №5) [2].
Преобразующий механизм имеет кинематически взаимосвязанные кривошипы, расположенные с одной стороны редуктора, центральный кривошип, установленный на выходном валу редуктора и содержащий размещенную в своем корпусе планетарную передачу внешнего зацепления с неподвижным центральным колесом, установленным на неподвижной оси, которая проходит через полый вал редуктора и жестко скрепляется с его корпусом и находится через паразитную шестерню в зацеплении с сателлитом, снабженным выходным концом, и ведущий кривошип, установленный на выходном конце сателлита центрального кривошипа и содержащий опору для крепления натяжного шкива или шатуна, при этом число зубьев центрального колеса планетарной передачи в два раза больше числа зубьев сателлита и кривошипы установлены так, что при их вертикальном расположении их радиусы направлены в одну сторону и являются продолжением друг друга. При этом за один оборот центрального кривошипа ведущий кривошип также совершает один оборот, но в противоположном направлении, а точка крепления натяжного шкива на ведущем кривошипе при равенстве радиусов кривошипов совершает прямолинейное возвратно-поступательное движение по прямой вертикальной линии.
У такого преобразующего механизма обязательным является наличие неподвижного центрального колеса в планетарной передаче центрального кривошипа и паразитной шестерни для его связи с сателлитом. Поэтому этот механизм имеет сравнительно большой радиус центрального кривошипа, равный суммарному межосевому расстоянию планетарной передачи. При этом успешно решается задача получения сравнительно большой длины хода станка-качалки. Если же требуется получить преобразующий механизм для небольшой длины хода, то возникает необходимость иметь небольшой радиус кривошипа и соответственно межосевое расстояние планетарной передачи и тогда возникают затруднения с обеспечением прочности зубчатых пар планетарной передачи для передачи крутящего момента редуктора.
Целью изобретения является создание дифференциального кривошипного преобразующего механизма, имеющего прямолинейное возвратно-поступательное движение точки крепления натяжного шкива на ведущем кривошипе и позволяющего создавать преобразующий механизм как для малых, так и для больших длин ходов, обеспечивающего возможность для создания перспективных конструкций станков-качалок с менее нагруженной металлоконструкцией, повышенной надежностью и безотказностью в сравнении с известными балансирными станками-качалками за счет исключения присущих им слабых звеньев - шатунов, траверсы, балансира с головкой балансира, крепежных соединений этих узлов, нагруженной поперечными силами стойки, часто приводящих к отказам.
Эта цель достигается тем, что у предлагаемого дифференциального кривошипного преобразующего механизма редуктор выполняется с двумя выходящими в одну сторону выходными валами. Первый выходной вал полый. Внутри него расположен второй соосный с ним выходной вал. Для передачи вращения валам редуктор имеет отдельные зубчатые пары на выходной ступени. При этом предлагаемый преобразующий кривошипный механизм имеет кинематически взаимосвязанные кривошипы. Центральный кривошип, установленный на первом полом выходном валу редуктора и имеющий размещенную в своем корпусе цилиндрическую планетарную передачу внешнего зацепления с вращающимся центральным колесом, которое жестко связано с вторым выходным валом редуктора и находится в зацеплении с сателлитом планетарной передачи непосредственно или связано с ним через две паразитные шестерни. При этом сателлит установлен на выходном валу центрального кривошипа, который снабжен выходным концом, на котором установлен ведущий кривошип, имеющий опору для крепления натяжного шкива. При этом радиусы кривошипов равны или не равны друг другу, а значения чисел зубьев зубчатой пары центрального кривошипа и зубчатых пар редуктора для привода выходных валов редуктора подобраны таким образом, что при передаче вращения кривошипам за один оборот центрального кривошипа ведущий кривошип также совершает один оборот и они вращаются в разные стороны. При этом кривошипы установлены так, что при их вертикальном расположении их радиусы направлены в одну сторону и являются продолжением друг друга. При выполнении этих условий, если радиусы кривошипов равны друг другу, точка крепления натяжного шкива на ведущем кривошипе совершает прямолинейное возвратно-поступательное движение по прямой вертикальной линии, если же радиусы кривошипов не равны друг другу, то точка крепления натяжного шкива на ведущем кривошипе совершает возвратно-поступательное движение по сильно вытянутой эллипсообразной кривой.
При необходимости получить механизм с большой длиной хода для передачи вращения от центрального колеса планетарной передачи к сателлиту устанавливаются две паразитные шестерни. При этом все свойства преобразующего механизма сохраняются, но появляется возможность увеличить межосевое расстояние центрального кривошипа и довести радиус кривошипа до требуемых значений и, кроме того, уменьшить диаметры центрального колеса и сателлита на выходном валу.
Наиболее просто осуществить выбор чисел зубьев колес предлагаемого преобразующего механизма, если принять число зубьев центрального колеса и сателлита планетарной передачи центрального кривошипа равными друг другу, то есть их передаточное число равно единице. В этом случае необходимые условия взаимосвязи кривошипов будут выполнены, если за один оборот первого выходного вала редуктора, то есть корпуса центрального кривошипа, второй выходной вал редуктора с центральным колесом планетарной передачи совершит три оборота. Тогда за один оборот центрального кривошипа его выходной вал вместе с ведущим кривошипом также совершит один оборот вокруг своей оси, но в противоположном направлении, что и требуется из условий взаимосвязи кривошипов.
Необходимо иметь ввиду, что при этом один оборот центрального колеса необходим для взаимосвязи кривошипов и поворота выходного вала с ведущим кривошипом также на один оборот в другую сторону. Два дополнительных оборота центрального колеса требуются для компенсации поворота сателлита от планетарного движения вокруг центрального колеса планетарной передачи и для компенсации его поворота, которое он получает от зацепления с центральным колесом при обкатке вокруг него. Так как при этом сателлит поворачивается в направлении, обратном требуемому, то два дополнительных поворота центрального колеса не позволяют сателлиту это сделать и он поворачивается на один оборот.
Численный пример: зубчатая пара выходной ступени редуктора для привода первого выходного вала - число зубьев колеса 72, число зубьев шестерни 18. Зубчатая пара выходной ступени редуктора для привода второго вала редуктора - число зубьев колеса 52, число зубьев шестерни 39. Поскольку шестерни этих зубчатых пар вращаются с одной частотой, то для поворота первого вала на один оборот шестерня должна совершить 72:18=4 оборота. Тогда второй вал с центральным колесом совершит (39×4):52=3 оборота, что и требуется по условию.
В тех случаях, когда передаточное число центрального колеса и сателлита не равно единице, подбор чисел зубьев зубчатых пар выходной ступени редуктора для привода его выходных валов будет несколько сложнее, но условие для выбора чисел зубьев зубчатых передач остается прежним - центральный кривошип и ведущий кривошип должны вращаться с одинаковой частотой и в противоположных направлениях.
На фиг.1 схематично представлен предлагаемый дифференциальный кривошипный преобразующий механизм привода станка-качалки с редуктором в разрезе.
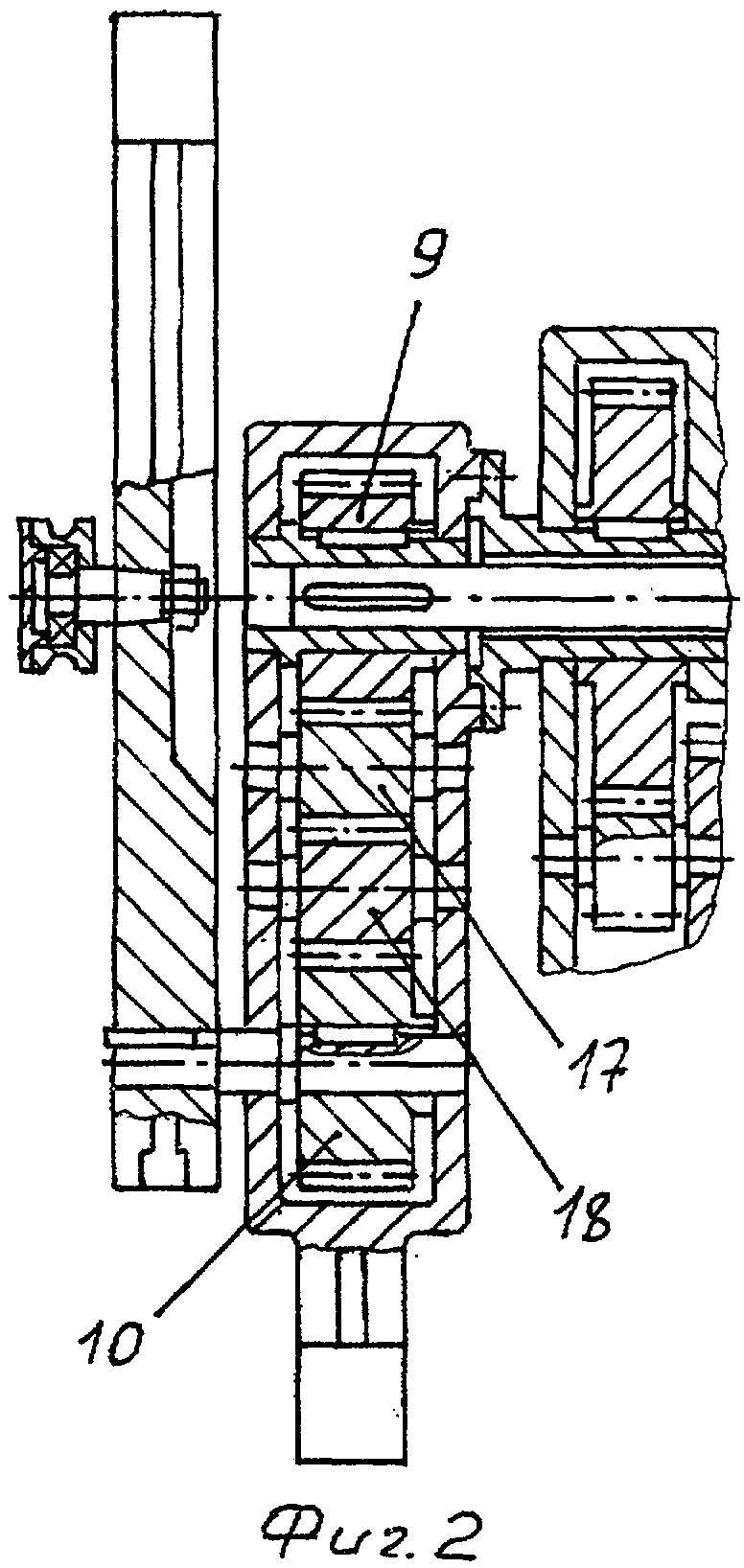
На фиг.2 схематично представлен вариант исполнения планетарной передачи центрального кривошипа предлагаемого дифференциального кривошипного механизма привода станка-качалки с двумя паразитными шестернями в разрезе.
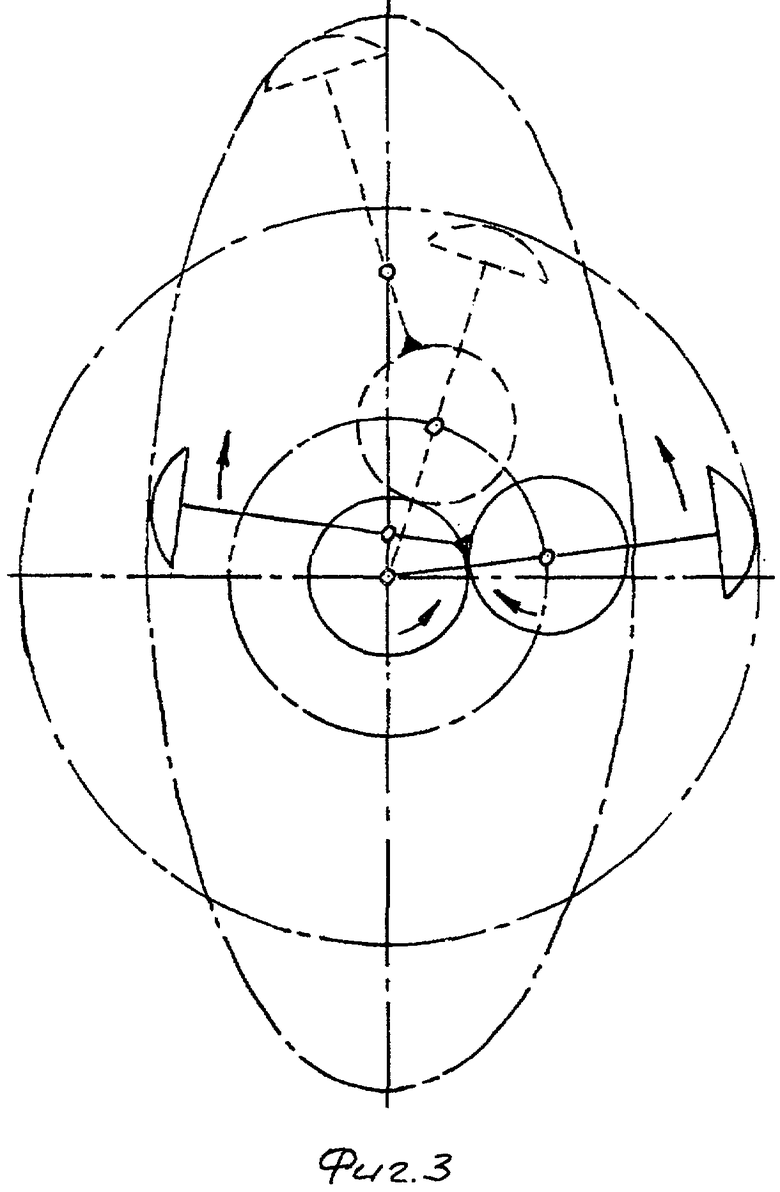
На фиг.3 представлена схема взаимодействия деталей дифференциального кривошипного преобразующего механизма станка-качалки и траектории движения крайних точек кривошипов.
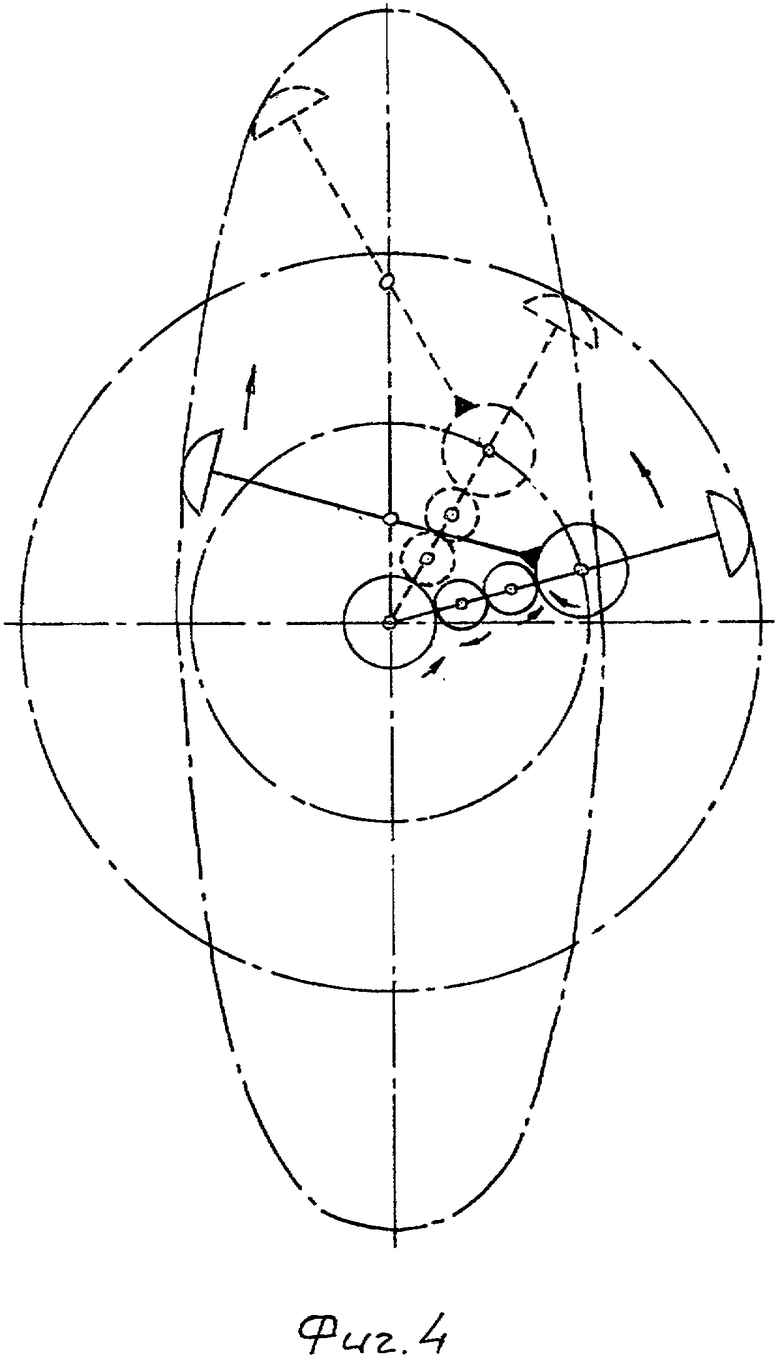
На фиг.4 представлена схема взаимодействия деталей дифференциального кривошипного преобразующего механизма станка-качалки с планетарной передачей центрального кривошипа с двумя паразитными шестернями и траектории движения крайних точек кривошипов.
Дифференциальный кривошипный преобразующий механизм привода станка-качалки, фиг.1, состоит из редуктора 1 с полым выходным валом 2 и проходящим внутри него и соосным с ним выходным валом 3. Выходные валы редуктора 2 и 3 имеют в корпусе редуктора отдельные опоры и для передачи им вращения на выходной ступени редуктора на них установлены отдельные зубчатые пары. На полом выходном валу 2 установлено колесо 4, которое находится в зацеплении с валом шестерней 5, а на выходном валу 3 установлено колесо 6, которое находится в зацеплении с колесом 7. При этом колесо 7 жестко установлено на валу шестерни 5. На выходном конце полого выходного вала 2 жестко закреплен корпус центрального кривошипа 8. В корпусе центрального кривошипа размещена цилиндрическая планетарная передача внешнего зацепления, которая состоит из центрального колеса 9, жестко установленного на выходном конце вала 3 редуктора и находится в зацеплении с сателлитом 10, который установлен на валу центрального кривошипа 11, имеющего выходной конец. На выходном конце вала 11 центрального кривошипа установлен ведущий кривошип 12 с осью 13, на которой подвижно установлен натяжной шкив 14. Числа зубьев колес планетарной передачи центрального кривошипа 9 и 10 и зубчатых пар выходной ступени редуктора для привода его выходных валов 2 и 3 имеют численные значения, при которых за один оборот вала 2, а вместе с ним и корпуса центрального кривошипа 8 выходной вал центрального кривошипа 11, а вместе с ним и установленный на его выходном конце ведущий кривошип 12 также совершают один оборот, но в противоположном направлении. Кривошипы установлены так, что при их вертикальном расположении радиусы кривошипов направлены в одну сторону и являются продолжением друг друга. На кривошипах установлены уравновешивающие грузы 15 и 16.
Возможно исполнение, когда центральное колесо 9 планетарной передачи центрального кривошипа связано с сателлитом 10 выходного вала центрального кривошипа через две паразитные шестерни 17 и 18, фиг.2.
Дифференциальный кривошипный преобразующий механизм работает следующим образом.
Вращательное движение с выходного вала 2 редуктора 1 передается на корпус центрального кривошипа 8, а с выходного вала редуктора 3 - центральному колесу 9 планетарной передачи. При этом сателлит 10 планетарной передачи обкатывается вокруг центрального колеса 9 и одновременно получает от него дополнительное вращение, сообщаемое за счет того, что само центральное колесо также вращается с частотой вращения выходного вала редуктора 3. Числа зубьев центрального колеса и сателлита планетарной передачи центрального кривошипа и зубчатых пар выходной ступени редуктора имеют численные значения, при которых за один оборот центрального кривошипа его выходной вал также совершает один оборот, но в противоположном направлении. При равенстве радиусов кривошипов конец радиуса ведущего кривошипа находится в вертикальной плоскости, проходящей через ось выходных валов редуктора 1, и тогда при встречном вращении кривошипов с одинаковой частотой при сложении их движений конец радиуса ведущего кривошипа 12 перемещается возвратно-поступательно по прямой вертикальной линии, фиг.3 и фиг.4. Когда радиусы кривошипов не равны друг другу, тогда конец радиуса ведущего кривошипа перемещается по сильно вытянутой эллипсообразной кривой, на схемах условно не показана.
При этом за один двойной ход преобразующего механизма радиусы кривошипов один раз складываются на полную длину, когда оба находятся ниже оси выходного вала редуктора и направлены вниз, а в другой раз, когда находятся выше оси выходных валов редуктора и направлены вверх и поэтому длина хода у такого преобразующего механизма равна удвоенной сумме длин радиусов кривошипов.
Проверка взаимодействия деталей предлагаемого дифференциального кривошипного преобразующего механизма станка-качалки проведена на изготовленной в металле модели (1:10).
Важным свойством дифференциального кривошипного преобразующего механизма является то, что точка крепления натяжного шкива на ведущем кривошипе совершает прямолинейное возвратно-поступательное движение по вертикальной прямой линии. Это позволяет создавать станки-качалки со стойкой, нагруженной только вертикальными силами, исключить из конструкции такие слабые звенья, как шатуны, траверса, балансир, головка балансира, крепежные соединения этих узлов, присущие широко применяемым балансирным станкам-качалкам, заменив их перекладиной с направляющими шкивами и гибким элементом, что создает условия для повышения надежности и безотказности работы станков-качалок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК-КАЧАЛКА | 2006 |
|
RU2308616C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2002 |
|
RU2246650C2 |
| ДИФФЕРЕНЦИАЛЬНО-БАЛАНСИРНЫЙ СТАНОК-КАЧАЛКА | 2007 |
|
RU2355914C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2004 |
|
RU2267649C2 |
| СТАНОК-КАЧАЛКА | 2004 |
|
RU2270367C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ СТАНОК-КАЧАЛКА | 2003 |
|
RU2265138C2 |
| Зубчато-рычажная планетарная передача | 1979 |
|
SU892052A1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| РЕДУКТОР СТАНКА-КАЧАЛКИ | 1993 |
|
RU2075673C1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |
Изобретение относится к машиностроению и может быть использовано в приводах станков-качалок для преобразования вращательного движения в возвратно-поступательное. Для привода выходных валов 2 и 3 цилиндрический редуктор 1 имеет колеса 4, 6, 7 и вал-шестерню 5. Центральный кривошип 8 установлен на выходном валу 2 редуктора и содержит размещенную в своем корпусе планетарную передачу внешнего зацепления, включающую центральное колесо 9 и сателлит 10, который установлен на выходном валу 11 центрального кривошипа 8. Ведущий кривошип 12 установлен на выходном конце вала 11 центрального кривошипа 8. Числа зубьев центрального колеса 9, сателлита 10 и зубчатых пар редуктора подобраны таким образом, что за один оборот центрального кривошипа ведущий кривошип также совершает один оборот, но в противоположном направлении. Кривошипы установлены так, что при их вертикальном расположении их радиусы направлены в одну сторону и являются продолжением друг друга. Такое выполнение позволяет обеспечить прямолинейное возвратно-поступательное движение точки крепления натяжного шкива на ведущем кривошипе, получить конструкции перспективных станков-качалок с малой и большой длиной хода без слабых звеньев. 2 з.п. ф-лы, 4 ил.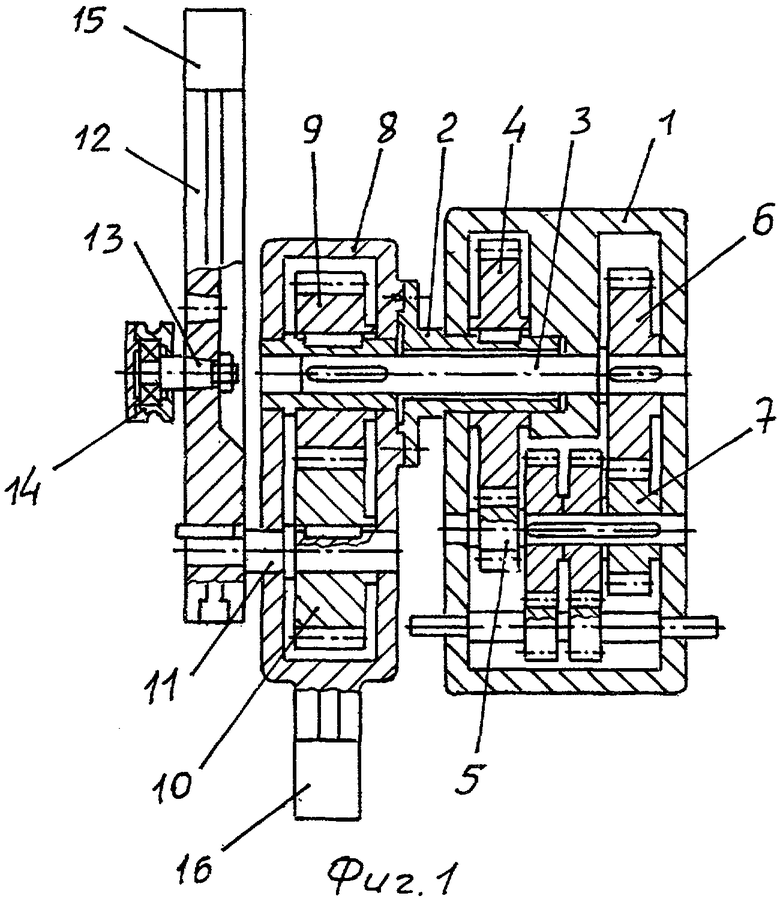
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2002 |
|
RU2246650C2 |
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1984 |
|
SU1193344A1 |
| Механизм для преобразования движения | 1984 |
|
SU1236237A1 |

