Изобретение относится к оптическим методам неразрушающего контроля, а именно к дефектоскопии внутренних полостей с помощью эндоскопов.
Известен стереоэндоскоп, содержащий корпус, два объектива, оптическую передающую систему, две регистрирующие системы, причем оптическая передающая система содержит оптико-механический коммутатор, обеспечивающий поочередное и исходное подключение к оптическому каналу соответствующего объектива и регистрирующей системы [1].
Недостаток данного устройства - ограниченная частота переключения и вибрация эндоскопа при работе оптико-механического коммутатора, а также субъективность измерения глубины (высоты) дефекта с помощью дальнометрических стереомарок, рассматриваемых оператором на фоне изображения поверхности объекта контроля.
Цель изобретения - устранение этих недостатков.
Для этого в стереоэндоскоп, содержащий корпус, два идентичных объектива с равными фокусными расстояниями, систему передачи изображений, дополнительно введены две идентичные ПЗС-матрицы, микролазер, компьютер и жидкокристаллические обтюрационные очки, при этом оптические оси объективов, в фокальных плоскостях которых расположены ПЗС-матрицы и ось микролазера, параллельны друг другу и перпендикулярны продольной оси корпуса стереоэндоскопа и расположены в плоскости, образованное продольной осью корпуса эндоскопа и оптической осью микролазера, компьютер осуществляет поочередное и синхронное подключение одной из ПЗС-матриц и соответствующего канала обтюрационных очков, необходимое для создания стереоскопического эффекта, а также вычисление расстояния D от эндоскопа до точки поверхности объекта, подсвечиваемой микролазером, которое производится по формуле D=C/P, C=ƒ′, B - константа оптической системы эндоскопа, ƒ′ - фокусные расстояния объективов, B - расстояние между оптическими осями объективов в плоскости их расположения, Р=x2-x1 - паралакс изображений лазерной точки на объекте на ПЗС-матрицах, x2 и x1 - координаты этих точек в плоскости соответствующих ПЗС-матриц, результат вычислений воспроизводится на дисплее компьютера, а фокусные расстояния объективов выбираются с учетом условий  где Dmin - минимальное расстояние от эндоскопа до объекта, l - расстояние от оси микролазера до оси ближайшего к нему объектива, A - размер растра ПЗС-матрицы.
где Dmin - минимальное расстояние от эндоскопа до объекта, l - расстояние от оси микролазера до оси ближайшего к нему объектива, A - размер растра ПЗС-матрицы.
Схема устройства показана на фиг.1 и 2.
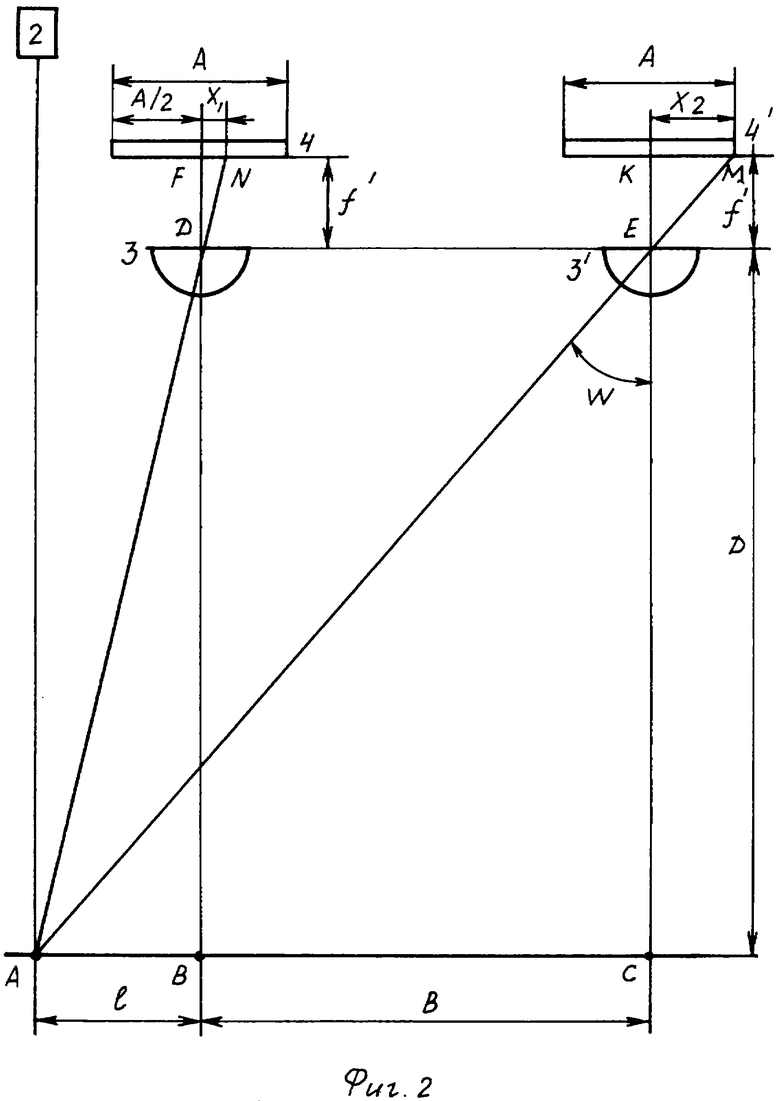
На фиг.1 показана принципиальная блок-схема лазерного стереоэндоскопа, а на фиг.2 - оптико-геометрическая схема для вычисления расстояния от стереоэндоскопа до объекта.
Устройство (фиг.1) содержит корпус 1, в котором расположены микролазер 2, идентичные объективы 3 и 3′ с одинаковыми фокусными расстояниями ƒ′, идентичные ПЗС-матрицы 4 и 4′, размером А и А, установленные в фокальных плоскостях соответственно объективов 3 и 3′, компьютер 5 с дисплеем 6 и жидкокристаллические обтюрационные очки 7. Лазерный стереоэндоскоп может содержать также устройство подсветки от объекта, например, на основе светодиода или галогенной лампы, которое не показано на фиг.1, в силу общеизвестности данного технического решения.
Оптические оси объективов 3 и 3′ и микролазера 2 параллельны друг другу и находятся в одной плоскости, образованной продольной осью корпуса эндоскопа и оптической осью микролазера 2. Расстояние между осями объективов 3 и 3′ равно B. Расстояние от оси микролазера 2 до оси объектива 3 равно l.
Устройство работает следующим образом.
Микролазер 2 формирует на поверхности объекта 8 яркую точку, изображения которой, формируемые объективами 3 и 3′, имеют в плоскостях ПЗС-матриц 4 и 4′ соответственно линейные координаты x1 и x2. Расстояние l от оси лазера 2 до оси ближайшего к нему объектива 3 приняло l<<B, что позволяет использовать микролазер 2 в качестве целеуказателя при наведении эндоскопа на нужную точку объекта 8.
Фокусные расстояния объективов 3 и 3′ выбираются из условия  что позволяет использовать их без перефокусировок в соответствии с известным из геометрической оптики соотношением [2].
что позволяет использовать их без перефокусировок в соответствии с известным из геометрической оптики соотношением [2].
Для того чтобы при минимальном расстоянии до объекта Dmin изображение лазерной точки на объекте не уходило за пределы растра ПЗС-матрицы 4, наиболее удаленной от микролазера 2, необходимо выполнение условия  что вытекает из выражения для тангенса N/2 (фиг.2). Действительно, из прямоугольных треугольников АЕС и КНЕ имеют
что вытекает из выражения для тангенса N/2 (фиг.2). Действительно, из прямоугольных треугольников АЕС и КНЕ имеют  т.к. КН=A/2, приравнивая эти выражения, окончательно получаем вышеуказанное соотношение.
т.к. КН=A/2, приравнивая эти выражения, окончательно получаем вышеуказанное соотношение.
Формула для определения текущего расстояния D от эндоскопа до объекта можно получить из рассмотрения подобных треугольников AED и DFN и АСЕ и КЕН (фиг.2). Очевидно, что  и
и  Но FN=x1, DE=KE=f', AB=l, AC=B+l, KH=x2, BD=CE=D.
Но FN=x1, DE=KE=f', AB=l, AC=B+l, KH=x2, BD=CE=D.
Отсюда имеем  После преобразований получаем окончательно
После преобразований получаем окончательно  где P=x2-x1, т.к. B=const и f′=const для конкретного варианта конструкции эндоскопа, можно записать D=C/P, где C=B·f' - константа конкретной оптической системы.
где P=x2-x1, т.к. B=const и f′=const для конкретного варианта конструкции эндоскопа, можно записать D=C/P, где C=B·f' - константа конкретной оптической системы.
Оценим погрешность вычисления предложенным методом. Дифференцируя формулу для дальности, получим 
Таким образом, ошибка измерения дальности линейно зависит от погрешности изменения линейного параллакса ΔP. Для современных ПЗС-матриц она равна или меньше размера кисселя (элемента) ПЗС-матрицы, а именно ΔP≤0,01 мм.
Для пилотного образца эндоскопа было принято В=100 мм, f′=10 мм, C=1000 мм, Dmin=200 мм, ΔP=0,01 мм. Тогда даже при максимальном расстоянии до объекта, принятом Dmax=1000 мм (контроль топливных баков и т.п. объектов), получим  или
или  , что вполне отвечает требованиям практики.
, что вполне отвечает требованиям практики.
В практической работе с лазерным стереоэндоскопом оператор, наблюдая на экране дисплея изображения лазерной точки, перемещает эндоскоп относительно поверхности объекта, последовательно совмещая это изображение с нужным элементом контролируемого объекта. При этом на экране дисплея автоматически высвечивается значение расстояния от стереоэндоскопа до точки объекта, подсвеченной лазером. В случае необходимости оператор надевает жидкокристаллические обтюрационные очки и визуально оценивает по обычному стереоскопическому изображению рельеф поверхности объекта, фиксирует зоны максимальной деформации, оценивает степень дефектности изделия и измеряет глубину (высоту) отдельных дефектов (вмятины, коррозионные раковины, вздутия и т.п.) по разности расстояний до выступов или впадин соответствующих неровностей от выбранного уровня отсчета, сравнивает их с допустимыми значениями.
Планерные (плоскостные) размеры дефектов могут оцениваться, как и в прототипе, с помощью стандартных измерительных линейных шкал.
ЛИТЕРАТУРА
1. Авторское свидетельство №938620, СССР.
2. Турыгин И.А. Прикладная оптика. М.: Машиностроение. 1965. 362 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2005 |
|
RU2280963C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2003 |
|
RU2235447C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2005 |
|
RU2280964C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2005 |
|
RU2280965C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2006 |
|
RU2315446C2 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2413206C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405137C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2008 |
|
RU2386956C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405135C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405138C1 |
Изобретение относится к оптическим методам неразрушающего контроля, а именно к дефектоскопии внутренних полостей с помощью эндоскопов. Стереоэндоскоп содержит корпус, два идентичных объектива с равными фокусными расстояниями, систему передачи изображений, две идентичных ПЗС-матрицы, микролазер, компьютер и жидкокристаллические обтюрационные очки. Оптические оси объективов, в фокальных плоскостях которых расположены ПЗС-матрицы, и ось микролазера параллельны друг другу и перпендикулярны продольной оси корпуса стереоэндоскопа и расположены в плоскости, образованной продольной осью корпуса эндоскопа и оптической осью микролазера. Компьютер осуществляет поочередное и синхронное подключение одной из ПЗС-матриц и соответствующего канала обтюрационных очков, необходимое для создания стереоскопического эффекта, а также вычисление расстояния D от эндоскопа до точки поверхности объекта, подсвечиваемой микролазером. Координаты этих точек - в плоскости соответствующих ПЗС-матриц, результат вычислений воспроизводится на дисплее компьютера. Фокусные расстояния объективов выбираются с учетом условий  где Dmin - минимальное расстояние от эндоскопа до объекта, l - расстояние от оси микролазера до оси ближайшего к нему объектива, А - размер растра ПЗС-матрицы, В - расстояние по нормали между оптическими осями объективов в плоскости их расположения. Изобретение устраняет субъективность измерения глубины (высоты) дефекта. 2 ил.
где Dmin - минимальное расстояние от эндоскопа до объекта, l - расстояние от оси микролазера до оси ближайшего к нему объектива, А - размер растра ПЗС-матрицы, В - расстояние по нормали между оптическими осями объективов в плоскости их расположения. Изобретение устраняет субъективность измерения глубины (высоты) дефекта. 2 ил.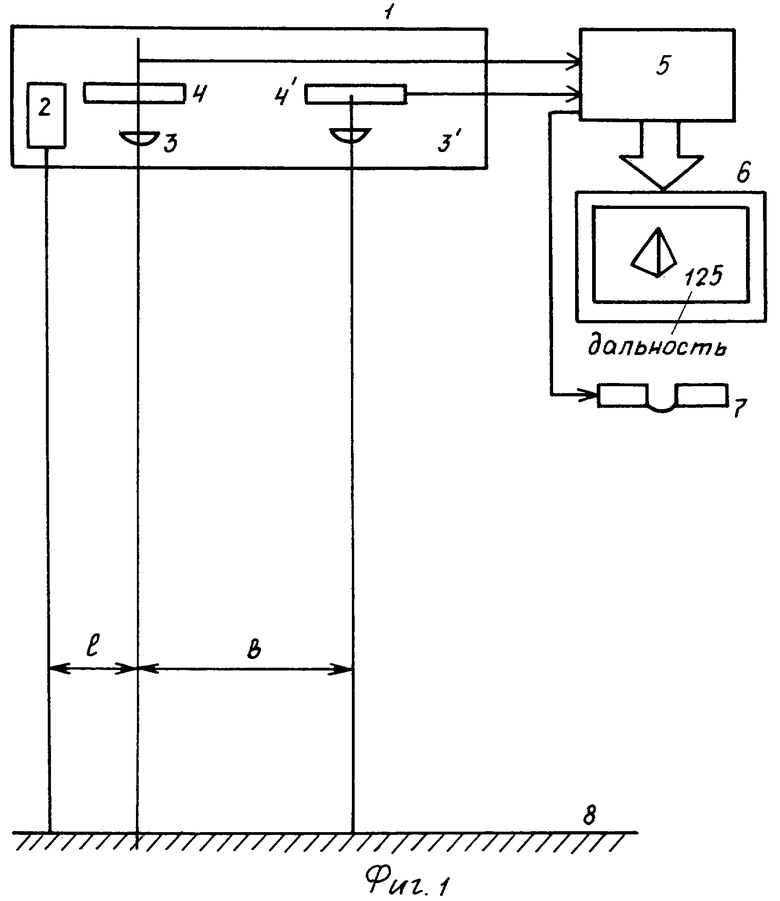
Лазерный стереоэндоскоп, содержащий корпус, два идентичных объектива с равными фокусными расстояниями и систему передачи и регистрации изображений, отличающийся тем, что в него введены две идентичные ПЗС-матрицы, микролазер, компьютер и жидкокристаллические обтюрационные очки, при этом оптические оси объективов, в фокальных плоскостях которых расположены ПЗС-матрицы, и ось микролазвра параллельны друг другу и перпендикулярны продольной оси корпуса стереоэндоскопа и расположены в плоскости, образованной продольной осью корпуса эндоскопа и оптической осью микролазера, компьютер осуществляет поочередное и синхронное подключение одной из ПЗС-матриц и соответствующего канала обтюрационных очков, необходимое для создания стереоскопического эффекта, а также вычисление расстояния D от эндоскопа до точки поверхности объекта, подсвечиваемой микролазером, которое производится по формуле D=c/p, c=f'·B - константа оптической системы; f' - фокусное расстояние объективов; В - расстояние по нормали между оптическими осями объективов в плоскости их расположения; P=x2-x1 - параллакс изображений лазерной точки на объекте на ПЗС-матрицах; x2 и x1 - координаты этих точек в плоскости соответствующих ПЗС-матриц, результат вычислений воспроизводится на дисплее компьютера, а фокусные расстояния объективов выбираются с учетом условий 
где Dmin - минимальное расстояние от эндоскопа до объекта; l - расстояние от оси микролазера до оси ближайшего к нему объектива; А - размер растра ПЗС-матрицы.
| Эндоскоп | 1981 |
|
SU938920A1 |
| RU 2004117316 A, 20.11.2005 | |||
| US 3796220 A, 12.03.1974 | |||
| JP 8248362 A, 27.09.1996 | |||
| Эндоскоп | 1979 |
|
SU859987A1 |

