Область техники
Изобретение относится к кибернетике и может быть использовано, например, в радиотехнике.
Предшествующий уровень техники
В науке и технике известно большое число различных методов и способов для передачи сообщений различной физической природы. Они основаны на фильтрации и обработке сигналов в частотной, временной, пространственной областях за счет использования поляризационных свойств сигналов, их кодирования и т.д.
В качестве примера научного подхода к решению задачи повышения точности передаваемых сообщений можно отметить работу В.П.Бакалова "оптимальная пространственно-временная фильтрация", опубликованную в журнале "Радиотехника" (1984 г., №12, стр.3-8). В этой статье рассмотрена линейная оптимальная пространственно-временная фильтрация случайных стационарных и нестационарных процессов и полей. Определены оптимальные передаточные функции компенсационных каналов, минимизирующие среднеквадратическое отклонение (СКО) сигналов и максимизирующие отношение сигнал-помеха.
В статье показано, что для информационной системы, в которой имеется один или несколько источников сигналов сообщений с не изменяющимися в пространстве координатами, а также один или несколько источников помех, координаты которых также неизменны, можно в рамках модели постановки задачи найти структурные схемы оптимальных фильтров, дающих дополнительный выигрыш в помехоустойчивости по сравнению с обычными винеровскими фильтрами. Наиболее показателен в этом смысле случай, когда спектральная плотность помехи велика по сравнению со спектральной плотностью сигнала сообщения. Найденные структурные схемы представляют собой пример научного формально-символьного решения этой задачи в рамках модели ее постановки. При этом остается в стороне вопрос практического синтеза оптимального фильтра со сложной передаточной характеристикой, представляющей собой комплексную функцию частоты, получаемую в результате различных математических операций над рядом других комплексных функций частоты: передаточных функций по сигналу и помехе, оценок передаточных функций канала от точек излучения сигналов и помех до точек измерения (приема), спектральных плотностей сигнала и помехи. Получение этих функции требует специального, предварительного исследования информационной системы.
Основным недостатком этого метода является узость практических областей его использования и высокая трудоемкость при реализации подобных фильтров. Действительно, синтезированный для одного временного отрезка фильтр уже не будет оптимальным для другого отрезка времени, если в информационной системе произошло, например, относительное перемещение точек расположения источников сообщений и источников помех, что имеет место быть в подавляющем большинстве реальных прикладных задач теории информации. Кроме того, известные в настоящее время методы синтеза фильтров с требуемой передаточной характеристикой по заданному виду амплитудно-частотной характеристики (АЧХ) и фазо- или время-частотной характеристикам (ФЧХ или ВЧХ) сводятся к методам экспериментального итерационного подбора различной комбинации фильтров низких частот (ФНЧ), фильтров высоких частот (ФВЧ) определенного порядка или комбинации полосовых фильтров (ПФ) различной добротности. Поскольку данный способ не дает однозначного технического решения задачи, описанного через совокупность общеизвестных узлов, блоков и связей между ними, а задача решена в виде формально-символьных, научных категорий (формул), то он не является патентоспособным техническим решением.
Учитывая эти обстоятельства, модель информационной системы должна быть усложнена. В отличие от вышеописанной модели системы, необходимо ее усложнить и решать задачу оптимальной фильтрации нестационарных, неэргодических процессов, полей, сигналов или, по-другому, задачу передачи сообщений любой физической природы в каналах с изменяющимися параметрами и случайными помехами, когда местоположение передатчиков сигналов и помех, а также точки приема сообщения могут случайным образом меняться. Эту задачу можно еще усложнить, если рассматривать не собственно фильтрацию электрических сигналов в оптимальном фильтре, а рассматривать все действия и преобразования над сигналами (любой физической природы) по их передаче из одной точки пространства и времени в другую точку - точку получения или приема сообщения этой же физической природы. Понятно, что подобным образом сформулированную задачу можно рассматривать как центральную задачу теории информации, поскольку ее решение может дать ответ на вопрос: как можно минимизировать потери информации или, по-другому, рост энтропии любой реальной системы связи.
В рамках вышеизложенной постановки эта задача была решена в изобретении "Способ оптимальной передачи сообщений любой физической природы, например способ оптимального звуковоспроизведения и система для его осуществления. Способ оптимального пространственного активного понижения уровня сигналов любой физической природы" (RU, А, 2145446). В изобретениях RU, A, 2106075; RU, A, 2106074; RU, А, 2106075 описаны технические решения, присутствующие в способе оптимальной передачи сообщений в качестве его части.
Способ оптимальной передачи сообщений, описанный в этом изобретении, основан на базовых положениях кибернетики. Система для его реализации построена по схеме с обратной связью и специальной обработкой передаваемого и принимаемого сообщений. Обработка этих сигналов ведется многополосным методом, при котором анализируются в реальном масштабе времени энергетические и временные параметры компонентов сигналов сообщений и помех, попадающих в соответствующие полосы анализа сигналов. В результате этой обработки удается непосредственно в процессе передачи сообщений осуществлять оптимальные предыскажения сигналов передаваемого сообщения и формировать сигналы для активного понижения шумов в точке получения сообщения. Причем все действия полностью автоматизированы и не требуют вмешательства человека, который, например, как в традиционном звуковоспроизведении, осуществляет аналогичные действия по компенсации искажающих свойств канала связи с помощью эквалайзера и корректора частотно-временных задержек сигналов на слух или с помощью соответствующего измерительного комплекса.
Таким образом, данный способ передачи сообщений позволяет все время автоматически рассчитывать энтропию системы передачи сообщений и компенсировать, насколько это возможно, рост энтропии. Рост энтропии в системах "тормозится" за счет внешнего источника энергии, энергия которого используется для генерации шумопонижающих сигналов, энергетических предыскажений сигналов сообщений, обработки сигналов и принципиально новой структурной схемы системы передачи сообщений, содержащей новые узлы: зондирующее устройство (например, микрофон), установленное вблизи точки получения сообщения, блок обработки сигналов и линию связи, предназначенную для передачи сигналов обратной связи в блок обработки сигналов. Важно отметить, что расположение зондирующего устройства вблизи точки получения сообщения обусловлено, с одной стороны, необходимостью реализации вышеуказанных функциональных возможностей блока обработки, а с другой стороны, предельно широкой постановкой задачи, в которой отсутствует информация о форме, свойствах канала связи, априорные сведения о характеристиках помех и сигналов, их мест расположения, информация о возможных их относительных перемещениях. Поэтому использование единственного зондирующего устройства логически вытекает из-за отсутствия априорной информации, в первую очередь, о канале связи. Если приемный элемент зондирующего устройства удалять от точки получения сообщения или использовать дополнительный приемный элемент, наугад разместив его в пространстве, то можно оказаться вне канала связи или передачи сообщений, например вне салона автомобиля, в котором передают звуковые сообщения. Поэтому способ является оптимальным с конструктивно-функциональной точки зрения только в рамках постановки задачи этого изобретения. При изменении постановки задачи этот способ можно усовершенствовать, введя новые действия (существенные признаки). Например, в изобретении RU, A, 2211491 решалась задача повышения точности передачи сообщений любой физической природы в каналах с мало изменяющимися параметрами удаленности точек излучения сигналов сообщений от точек их приема при наличии помех. Эта дополнительная информация о свойствах системы связи позволила найти новое техническое решение, позволяющее повысить эффективность подавления помех. Но наличие времени задержки сигналов для активного понижения шумов и помех не позволило полностью синхронизировать моменты времени прихода помех в точку получения сообщения и сигналов для их активного подавления. Кроме того, как показали исследования, эффект подавления помех и шумов в способах, описанных в патентах RU, А, 2145446 и RU, A, 2211491, ограничивается не только вышеуказанными задержками, но и уровнем развязки сигналов, принимаемых зондирующим устройством вблизи точки получения сообщения, и сигналами для активного понижения шума, излучаемыми в эту же точку пространства. При подобной структурной схеме система склонна к самовозбуждению. Спектр турбулентности подобной системы зависит от ряда параметров: частоты подавляемой помехи, скорости передачи сообщения в канале, задержки сигналов для активного понижения шумов и напоминает биения между сигналами шумов и сигналами для их активного подавления. В результате этого приходится ограничивать динамический диапазон сигналов для активного понижения шума, что приводит к незначительному (порядка единиц децибелл) эффекту понижения уровня шумов. Ниже будет показано, что если изменить вышеуказанную постановку задачи повышения точности передаваемого сообщения в каналах с помехами, то можно усовершенствовать известные из уровня техники способы передачи сообщений и способы понижения шумов.
Поскольку вышеописанные способы передачи сообщений в качестве своей части содержат способы понижения шумов, то целесообразно сделать краткий обзор известных из уровня техники способов понижения уровня шумов.
Известен способ подавления шумов преимущественно самолетов (JP, A, 52-15721). Способ заключается в приеме и преобразовании звуковых шумовых сигналов авиамоторного средства (самолета) в электрические сигналы, передаче принятых сигналов к месту их обработки, обработке этих сигналов посредством блока обработки, на вход которого подают эти сигналы, выполненного с возможностью осуществления энергетических и временных предыскажений принятых сигналов при формировании его выходных электрических сигналов, предназначенных для активного понижения шумовых сигналов, их преобразовании в звуковые сигналы, при этом место расположения точки приема сигналов находится ближе к источнику шума (двигателю), чем область пространства понижения шума. Эта область находится на земле.
Энергетические и временные предыскажения принятых шумовых сигналов осуществляют путем подбора уровней и фаз компонентов принятого электрического сигнала и запоминания (фиксации) энергетических и временных предыскажений, обеспечивающих эффект понижения шума в вышеуказанной области пространства. Конструктивно, блок обработки содержит транзистор, на эмиттере и коллекторе которого формируются противофазные сигналы, а также узел, в котором с помощью этих сигналов формируют выходной сигнал, фаза и уровень которого обеспечивает эффект шумопонижения. В варианте, используются усилители и громкоговорители для многоканального шумопонижения во все стороны от самолета. Пространственное разнесение приемного микрофона и громкоговорителя обеспечивает достаточно высокий уровень развязки между принимаемыми и излучаемыми сигналами. Это позволяет сформировать сигналы для шумопонижения, уровень которых сопоставим с уровнем шумовых сигналов. В результате, эффективность понижения шумовых сигналов, например, на частотах их наибольшей интенсивности достаточно высока.
Недостатком этой системы можно считать узкополосный характер эффекта понижения шума. Причина этого заключается в отличии спектров шумового сигнала источника шума - двигателя в различных точках области пространства на земле от спектра шумового сигнала в точке его приема, поскольку источником шума является пространственно распределенная совокупность различных шумящих узлов, деталей и агрегатов двигателя, представляющего собой, например, бочкоподобный агрегат диаметром порядка 1-2 м и длинной порядка 2-5 м, подвешенный к крылу самолета. Составляющие звуковых шумовых сигналов от различных узлов двигателя приходят в область пространства на земле и к точке расположения микрофона для приема шумовых сигналов на самолете с разными уровнями и фазами. Поэтому с помощью вышеописанного блока обработки удается подобрать уровни и фазы компонентов шумовых сигналов лишь в узкой полосе частот. Для других шумовых компонентов энергетические и временные предыскажения оказываются неоптимальными. Вместо эффекта понижения шума на этих частотах может, наоборот, наблюдаться эффект усиления уровня шума. По этой причине вариант понижения уровня шума во все стороны от самолета физически не реализуем. В результате общий уровень снижения шума в подобных системах невысок. Этим, по всей видимости, объясняется невнедренность способа понижения шума на авиатранспорте.
Более эффективно добиваться шумопонижающего эффекта можно, если использовать методы многополосной обработки шумовых сигналов, которые подробно описаны в вышеуказанных изобретениях (BU, A, 2145446 и RU, A, 2211491). В этих изобретениях показано, что многополосно отфильтровав сигналы (в данном случае шума), можно путем экспериментального подбора уровней и фаз (времени задержки) компонентов этих сигналов, попадающих в эти полосы частот, до определенной степени независимо, осуществлять формирование требуемых частотно-энергетических и частотно-временных предыскажений этих сигналов, например, для формирования сигналов активного понижения шумов. Говоря другими словами, осуществлять формирование АЧХ и ФЧХ фильтра, обеспечивающего наибольший эффект понижения шумов в требуемой области пространства. Ниже будет показано, что соответствующим образом доработав эти изобретения, можно избавиться от их недостатков и повысить точность передачи сообщений за счет более эффективного активного подавления помех и шумов.
В определенном смысле схожая проблема - повышения точности передачи сообщений, уже достаточно давно решается в такой области радиотехники как конструирование усилителей мощности, например, низких частот.
Известно большое число технических решений, направленных на повышение линейности усилителей электрических сигналов, например, посредством общей отрицательной обратной связи, которую изобрел и запатентовал в 1927 г. Харольд Блэк.
В основе этого технического решения лежит принцип суммирования сигнала с выхода каскада усиления или всего усилителя, если он выполнен в виде нескольких последовательно включенных каскадов усиления, и входного сигнала в противофазе и подачи суммы этих сигналов на вход усилителя. Данное техническое решение позволяет повышать линейность усилителя за счет снижения продуктов нелинейных и интермодуляционных искажений, происходящих собственно в усилителе электрических сигналов. Этот процесс во многом аналогичен процессу активного понижения шумов, но не в пространстве, например, где-то вне узлов и блоков шумопонижающей системы, а непосредственно внутри усилителя. Недостатком известных технических решений по повышению линейности усилителей можно считать низкую точность формирования передаточной характеристики цепи обратной связи с использованием традиционных решений.
В качестве прототипа способа передачи сообщений любой физической природы в этом изобретении выбрано устройство для воспроизведения звуковых сигналов при наличии помех и шумов San Francisco CD 70 фирмы Blaupunkt (журнал "Автозвук" №12, декабрь 2001 г., стр.103-115). Это проигрыватель компакт-дисков и радиоприемник, конструктивно объединенный с многофункциональным блоком обработки сигналов. К этому устройству можно подключить измерительный микрофон и ряд периферийных устройств (дополнительные усилители, громкоговорители). Измерительный микрофон предназначен для решения двух задач.
"Во-первых, это автоматическое регулирование громкости в зависимости от фоновых шумов, фактически - от скорости движения. На кратковременные всплески система не реагирует - такие уж там заложены постоянные времени. Зато на предсказуемое плавное повышение шумов ... реагирует своевременно и аккуратно. Вторая задача будет посложней. В San Francisco CD 70 имеется семиполосный эквалайзер, и для него предусмотрены три предустановки: EQ1, EQ2, EQ3. С помощью микрофона можно автоматически выровнять АЧХ по звуковому давлению при различном заполнении салона... Коррекция устанавливается независимо для каналов L и R (!), а если что ... вручную ... В звуковом тракте в дополнение к эквалайзеру здесь есть и обычный регулятор тембра НЧ и ВЧ... Встроенный кроссовер - ФНЧ для сабвуферного выхода и ФВЧ для остальных... Тонкомпенсапия здесь тоже имеет пять градаций глубины обработки... от низкой вибростойкости удалось избавиться". Этот проигрыватель укомплектован более совершенной системой антивибрации автомобильных проигрывателей CD - "анти-шок". В этом устройстве реализуется следующий способ передачи звуковых сообщений.
Сигналы сообщений преобразуют в электрические сигналы источника сообщений с помощью проигрывателя CD или радиоприемного устройства. Эти сигналы подают на один из входов блока обработки сигналов, который выполнен с возможностью осуществления энергетических (посредством регулятора уровня или громкости) и/или временных (посредством тонкомпенсированного регулятора громкости или путем задержки сигналов сообщений в системе антивибрации) предыскажений электрических сигналов источника сообщений при формировании выходных сигналов блока обработки. Эти сигналы усиливают, преобразуют в сигналы той же физической природы (в звуковые сигналы) и излучают в канал передачи сообщений до области пространства их получения - в салон автомобиля. Шумы, присутствующие в этом автомобиле, не подавляют, а увеличивают уровень громкости в салоне автомобиля пропорционально усредненному уровню шумов. В результате этих действий полезный информационный сигнал сообщения модулируется усредненным уровнем шума, т.е. приобретает новый специфический вид искажений. Это не только заметно на слух и раздражает слушателя (водителя) "плавающим" уровнем громкости, но и приводит к повышенной утомляемости слушателя, вынужденного вне своего желания слушать сигналы сообщений на повышенном уровне громкости совместно с высоким уровнем шумов. Использование подобной системы резко повышает аварийность и никак не согласуется с общеизвестными запатентованными положениями современной теории информации. Подобные методы повышения помехоустойчивости можно применять в радиосвязи, где сообщение передают посредством высокочастотного переносчика сообщений - несущей, повышая уровень которой, можно добиться роста соотношения сигнал/шум (помеха) в точке приема радиосигнала. Но при этом рост радиосигнала компенсируется в радиоприемном устройстве, например, с помощью системы АРУ, а также в результате специфических особенностей детектирования радиосигналов с различным видом модуляции. В звукотехнике подобный подход неприменим. Здесь нет никаких переносчиков сообщений. Передаваемый из одной точки пространства и времени в другую точку процесс конкретной физической природы (сигнал, поле и т.д. - это все синонимы), например звуковой сигнал, как раз и есть само сообщение. Современные научные положения о принципах передачи сообщений общеизвестны и подробно изложены, например, в патенте RU, А, 2145446. В этом источнике информации строго научно доказано, что при реализации оптимальных способов передачи сообщений в условиях помех необходимо стараться предельно точно повторить форму сигнала сообщения в точке его получения, а шумы и помехи надо подавлять. Только реализуя такой подход, можно создавать системы высшей формы организации, класса качества, группы сложности и реально повышать, например, потребительские свойства звуковоспроизводящей аппаратуры. Ниже будет показано, как можно реализовать этот подход, если имеется возможность априорного получения информации о канале передачи сообщений.
Раскрытие изобретения
В основу настоящего изобретения положена задача создать такие способы и системы для их осуществления, которые позволяют повысить точность передачи сообщений любой физической природы в каналах с помехами, если заранее известно, где находятся источники помех по отношению к области пространства получения сообщения, каков их спектр и каковы размеры и форма области пространства получения сообщения, и, таким образом, более эффективно понижать уровень помех и шумов, и повысить соотношение сигнал/шум (помеха) при передаче сообщений любой физической природы. Дополнительным техническим результатом является повышение соотношения сигнал/дум электрических сигналов источника сообщений и повышение линейности и помехозащищенности усилителей электрических сигналов.
Поставленная задача решается тем, что в известном способе передачи сообщений любой физической природы, заключающемся в преобразовании сообщений в электрические сигналы источника сообщений, их передаче к месту обработки, обработке сигналов источника посредством блока обработки, на второй вход которого подают эти сигналы, и выполненного с возможностью осуществления энергетических и/или временных предыскажений электрических сигналов источника сообщений при формировании выходных сигналов блока обработки, их усиления, преобразования в сигналы той же физической природы и излучения в канал передачи сообщений до области пространства их получения, в котором присутствуют помехи или шумы той же физической природы. Согласно изобретению осуществляют прием шумовых сигналов любой физической природы, их преобразование в принятые шумовые электрические сигналы, передачу их к месту обработки, обработку этих сигналов посредством блока обработки, снабженного первым входом, на который подают эти сигналы, и выполненного с возможностью осуществления энергетических и временных предыскажений принятых шумовых сигналов при формировании выходных электрических сигналов блока обработки, предназначенных для активного понижения шума в области пространства получения сообщения, их усиление, преобразование в сигналы той же физический природы и излучение до области пространства получения сообщения, причем место приема шумовых сигналов выбирают ближе к источнику шума, чем область пространства получения сообщения, а энергетические и временные предыскажения принятых шумовых электрических сигналов осуществляют путем подбора уровней и фаз их компонентов при нулевом уровне электрических сигналов источника сообщений или при уровне электрических сигналов источника сообщений ниже наперед заданного порога, запоминания энергетических и временных предыскажений, обеспечивающих эффект понижения уровня шума в области пространства получения сообщения.
Возможны варианты реализации способа, такие, что:
электрические сигналы для активного понижения шума формируют в ограниченной полосе частот низкочастотной части шумового спектра принятого шумового сигнала для увеличения размеров области пространства понижения шума;
энергетические предыскажения электрических сигналов источника сообщений осуществляют путем регулирования уровня сигнала источника сообщений, энергетические и временные - путем тонкомпенсированного регулирования уровня сигнала источника, а временные - путем задержки сигнала источника сообщений, например в системе антивибрации автомобильного проигрывателя компакт-дисков;
для корректировки спектра сигналов сообщений с учетом возможных искажений передаваемых сообщений в канале осуществляют неавтоматические частотно-энергетические и/или частотно-временные предыскажения электрических сигналов источника сообщений посредством блока обработки, выполненного с возможностью многополосной обработки электрических сигналов источника сообщений при формировании его выходных сигналов;
частотно-энергетические предыскажения осуществляют посредством эквалайзера, частотно-временные предыскажения - с помощью частотно-временных или частотно-фазовых корректоров, а частотно-энергетические и частотно-временные предыскажения осуществляют посредством темброблоков или фиксированных предустановок амплитудно-частотных и фазочастотных характеристик в предыскажающих фильтрах;
для реализации режима понижения уровня различных шумовых компонентов во всей вышеуказанной области шумового спектра с учетом возможных почти постоянных отличий спектра шумовых сигналов в области пространства получения сообщения и спектра принятого шумового сигнала осуществляют неавтоматические частотно-энергетические и частотно-временные предыскажения принятых шумовых электрических сигналов посредством блока обработки, выполненного с возможностью многополосной обработки принятых шумовых сигналов при формировании его выходных сигналов;
в области пространства получения сообщения осуществляют дополнительный прием сигналов любой физической природы, представляющих собой сигнал сообщения плюс шум, спектр которых может изменяться со временем по отношению к спектру принятого шумового сигнала не только за счет текущих изменений спектра передаваемого сообщения, но и за счет изменений собственно спектра шума в области пространства получения сообщений по отношению к спектру принятого шумового сигнала, преобразование дополнительно принятого сигнала любой физической природы в электрические сигналы обратной связи, их передачу к месту обработки, их обработку посредством блока обработки, выполненного с дополнительным входом, на который подают эти сигналы, и выполненного с возможностью автоматического формирования энергетических и временных или частотно-энергетических и/или частотно-временных предыскажений принятых шумовых сигналов любой физической природы посредством введения в блок обработки узлов, позволяющих автоматизировать действия по подбору уровней и/или фаз компонентов формируемых сигналов для активного понижения шума, а также действия по запоминанию и формированию энергетических и/или временных предыскажений этих сигналов, обеспечивающих эффект понижения уровня шума в области пространства получения сообщения;
в области пространства получения сообщения осуществляют дополнительный прием сигналов любой физической природы, представляющих собой сигнал сообщения плюс шум, спектр которых может изменяться по отношению к спектру сигналов источника не только за счет текущих изменений спектра передаваемого сообщения и случайных помех или шумов, но и за счет случайных изменений передаточной функции канала передачи сообщений, преобразование дополнительно принятого сигнала любой физической природы в электрические сигналы обратной связи, их передачу к месту обработки, обработку посредством блока обработки, снабженного дополнительным входом, на который подают эти сигналы, и выполненного с возможностью автоматического формирования частотно-энергетических и/или частотно-временных предыскажений электрических сигналов источника сообщений посредством введения в блок обработки узлов, позволяющих автоматизировать действия по подбору уровней и/или фаз многополосно формируемых компонентов сигналов источника сообщений;
для реализации режима понижения уровня различных шумовых компонентов во всей вышеуказанной области шумового спектра с учетом почти постоянных отличий спектра шумовых сигналов в области пространства получения сообщений по отношению к спектру принятого шумового сигнала осуществляют частотно-энергетические и частотно-временные предыскажения принятых шумовых электрических сигналов посредством блока обработки, выполненного с возможностью многополосной неавтоматической обработки принятых шумовых электрических сигналов при формировании выходных сигналов блока обработки;
для реализации режима понижения уровня различных шумовых компонентов во всей вышеуказанной области шумового спектра с учетом возможных случайных изменений во времени спектра шумовых сигналов в области пространства получения сообщений по отношению к спектру принятого шумового сигнала осуществляют автоматические частотно-энергетические и частотно-временные предыскажения принятых шумовых электрических сигналов посредством блока обработки, выполненного с возможностью осуществления этих предыскажений лишь в те моменты времени, когда уровень сигналов источника сообщений ниже наперед заданного, например перед передачей сообщений или в паузах во время передачи сообщений, посредством введения в блок обработки узлов, позволяющих автоматизировать действия по подбору уровней и фаз многополосно формируемых сигналов для активного понижения шума в эти моменты времени и их запоминания и формирования запомненных значений предыскажений во время передачи сигналов источника сообщений, когда уровень сигналов источника сообщений выше наперед заданного;
блок обработки выполняют с возможностью суммирования обработанных сигналов источника сообщений и обработанных принятых шумовых сигналов любой физической природы посредством сумматора для формирования таким образом его выходных сигналов и реализации одноканального способа передачи сообщений любой физической природы;
блок обработки выполняют с возможностью суммирований многополосно обработанных сигналов источника сообщений и многополосно обработанных принятых шумовых сигналов любой физической природы посредством не менее двух сумматоров для формирования таким образом его выходных сигналов и реализации многополосного способа передачи сообщений любой физической природы;
преобразование сообщений в электрические сигналы источника сообщений осуществляют многоканальным способом для реализации многоканального способа передачи сообщений в соответствующее числу каналов области пространства получения сообщений, в каждом из этих каналов осуществляют один из описанных вариантов способа передачи сообщений, при этим принятый шумовой сигнал является общим для этих каналов и подается на дополнительные входы блоков обработки, число которых равняется числу каналов передачи сообщений;
преобразование сообщений в электрические сигналы источника сообщений осуществляют многоканальным способом для реализации многоканального способа передачи сообщений в соответствующее числу каналов области пространства получения сообщений, в каждом из этих каналов осуществляют один из описанных вариантов способа передачи сообщений, при этим число принятых шумовых сигналов равняется числу каналов передачи сообщений, и они подаются на дополнительные входы блоков обработки, число которых равняется числу каналов передачи сообщений;
каждый выходной сигнал блока обработки усиливают посредством усилителя электрических сигналов и излучают до области или областей пространства получения сообщений любой физической природы;
места расположения блока обработки и источника сигналов сообщений пространственно не совпадают для осуществления возможности их поблочной реализации и комплектации системы передачи сообщений блоками с вышеуказанными функциональными возможностями, или места их расположения находятся поблизости для их конструктивной реализации в одном устройстве;
в качестве сообщений любой физической природы используют звуковые сообщения.
Поставленная задача изобретения решается тем, что в известном способе передачи сообщений любой физической природы, заключающемся в преобразовании сообщений в электрические сигналы источника сообщений, в усилении этих сигналов посредством усилителя, выполненного в виде одного или нескольких каскадов усиления, подачи усиленных электрических сигналов источника сообщений на нагрузку, формировании электрических сигналов обратной связи, их подачи хотя бы на один из каскадов усиления, согласно изобретению хотя бы один из сформированных сигналов обратной связи подвергают многополосной обработке посредством блока обработки сигналов, которые подают на его первый вход, в блоке обработки сигналы обратной связи многополосно фильтруют для формирования не менее двух каналов многополосной обработки компонентов сигналов обратной связи, каждый многополосно сформированный канал выполняют с возможностью осуществления энергетических и временных предыскажений компонентов сигналов обратной связи для повышения точности передаваемого сообщения за счет реализации возможности более точного формирования требуемой передаточной функции цепи обратной связи, многополосно обработанные компоненты сигналов обратной связи используют для формирования выходных сигналов блока обработки сигналов, которые подают на вышеуказанный хотя бы один из каскадов усиления электрических сигналов сообщений.
Возможны варианты реализации способа, такие, что:
в блоке обработки сигналов многополосно обработанные компоненты сигналов обратной связи суммируют для формирования выходных сигналов блока обработки;
в блоке обработки многополосно обработанные сигналы обратной связи дополнительно фильтруют для уменьшения нелинейных и интермодуляционных искажений компонентов сигналов обратной связи в полосах их обработки, многополосно обработанные и дополнительно отфильтрованные компоненты сигналов обратной связи суммируют, полученные таким образом сигналы являются выходными сигналами блока обработки;
сигналы обратной связи являются отрицательными или положительными сигналами обратной связи;
усиление электрических сигналов источника сообщений осуществляют путем многокаскадного усиления с комбинированной обратной связью отрицательной и положительной, при этом хотя бы одна из обратных связей подвергается многополосной обработке посредством блока обработки сигналов в соответствии с последовательностью вышеописанных действий, если многополосной обработке подвергается несколько сформированных сигналов обратной связи, то используют соответствующее число блоков обработки сигналов, на первые входы которых подают соответствующие сформированные сигналы обратной связи, а соответствующие выходные сигналы блоков обработки подают на соответствующие каскады усиления электрических сигналов источника сообщений;
в качестве усилителя используют усилитель мощности, нагрузкой усилителя служит излучатель сигналов, предназначенный для преобразования электрических усиленна сигналов сообщений в сигналы сообщений любой физической природы, а электрические сигналы обратной связи формируют с выхода усилителя, или с входа излучателя, или путем дополнительного преобразования сигналов любой физической природы в непосредственной близости от излучателя в электрические сигналы обратной связи;
энергетические и временные предыскажения компонентов электрических сигналов обратной связи осуществляют путем предварительного неавтоматического подбора регулировок уровней и фаз многополосно обрабатываемых сигналов обратной связи по настроечным сигналам сообщений удобной для этого формы, например шумоподобным сигналам или синусоидально-подобным сигналам различных частот по критерию, например, минимума среднеквадратического отклонения сигналов передаваемого сообщения;
энергетические и временные предыскажения компонентов сигналов обратной связи осуществляют автоматически по сигналам источника сообщений, например, шумоподобной формы или собственно по самим передаваемым сигналам сообщений посредством блока обработки сигналов, выполненного с возможностью автоматизации вышеуказанных действий и снабженного вторым входом, на который подают электрические сигналы источника сообщений с входа усилителя или соответствующего каскада усиления электрических сигналов источника сообщений, охваченного обратной связью, при этом в блоке обработки осуществляют многополосную фильтрацию электрических сигналов источника сообщений посредством фильтров с характеристиками, аналогичными фильтрам, предназначенный для осуществления многополосной фильтрации сигналов обратной связи, совместную обработку отфильтрованных в соответствующих полосах компонентов сигналов обратной связи и сообщений, выработку сигналов управления, позволяющих автоматизировать процессы энергетических и временных предыскажений сигналов обратной связи;
блок обработки сигналов выполняют со вторым входом, на который подают электрические сигналы источника сообщений или усиленные в предыдущих каскадах электрические сигналы источника сообщений, в блоке обработки осуществляют многополосную фильтрацию электрических сигналов источника сообщений посредством фильтров с характеристиками, аналогичными фильтрам, предназначенным для осуществления многополосной фильтрации сигналов обратной связи, при этом формируют не менее двух каналов многополосной обработки компонентов сигналов источника сообщений, каждый многополосно сформированный канал выполняют с возможностью осуществления энергетических и временных предыскажений компонентов сигналов источника сообщений для повышения точности передаваемого сообщения за счет компенсации амплитудно-частотных и/или фазочастотных искажений сигналов сообщений на участке цепи передачи сообщений, охваченной обратной связью, например в каскаде усиления, в усилителе, или в усилителе, связанном с нагрузкой, многополосно обработанные компоненты сигналов источника сообщений суммируют с многополосно обработанными компонентами сигналов обратной связи, полученные таким образом сигналы являются выходными сигналами блока обработки, которые подают на вход усилителя или вышеуказанный каскад, охваченный обратной связью;
энергетические и временные предыскажения компонентов электрических сигналов источника сообщений осуществляют в блоке обработки автоматически путем совместной обработки многополосно сформированных компонентов сигналов обратной связи и сигналов сообщений, выработки управляющих сигналов, позволяющих автоматизировать процессы энергетических и/или временных предыскажений компонентов сигналов сообщений;
в процессе передачи сообщений в блоке обработки осуществляют анализ уровней компонентов сигналов сообщений в полосах обработки и вырабатывают управляющие сигналы, посредством которых формируют подобранные ранее регулировки уровней компонентов сигналов источника сообщений и/или сигналов обратной связи с момента времени, когда уровень компонентов сигналов сообщений в соответствующей полосе обработки выше наперед заданного порогового уровня, в другие моменты времени уровни формируемых компонентов сигналов источника сообщений и/или сигналов обратной связи в блоке обработки автоматически изменяют для уменьшения коэффициента передачи компонентов сигналов сообщений в данной полосе частот и уменьшения за счет этого уровня компонентов продуктов нелинейных и интермодуляционных искажений, уменьшения шумов, помех и наводок;
для синхронизации во времени процессов автоматический многополосной пороговой регулировки уровней компонентов сигналов источника сообщений с моментом времени превышения уровня компонентов сигналов сообщений наперед заданного порога в процессе осуществления временных предыскажений компонентов сигналов источника сообщений осуществляют дополнительную их задержку на величину времени, необходимого для выработки в блоке обработки управляющих сигналов, обеспечивающих пороговую регулировку уровней компонентов сигналов на выходе блока обработки сигналов;
в процессе передачи сообщений любой физической природы в полосах обработки сигналов источника сообщений анализируют текущие уровни компонентов сигналов сообщений относительно не менее двух порогов и в зависимости от текущего уровня компонентов сигналов сообщений формируют различные коэффициенты передач и вид амплитудной характеристики в этих полосах обработки сигналов сообщений;
используют двухпороговый анализ уровней компонентов сигналов сообщений, а коэффициенты передачи сообщений в соответствующих частотных полосах формируют по следующему алгоритму: если уровень сигнала сообщений ниже первого порога, который может быть заранее установлен, например, на уровне - 20÷70 дБ относительно максимального неискаженного усиленного сигнала сообщений, то коэффициент передачи в соответствующей полосе обработки сигналов источника сообщений и/или сигналов обратной связи выбирают так, чтобы уменьшить коэффициент усиления каскада или усилителя, охваченного обратной связью, и реализовать режим полосового порогового понижения уровня усиливаемых сигналов сообщений, если уровень сигнала сообщений в данной полосе частот превышает первый пороговый уровень, но ниже второго порогового уровня, который монет быть заранее установлен, например, на уровне - 10÷2 дБ относительно максимального неискаженного усиленного сигнала сообщений, то коэффициент передачи в этой полосе обработки сигналов устанавливают с ранее подобранными параметрами энергетических и временных предыскажений, причем энергетические и временные предыскажения являются постоянными и не зависят от уровня компонентов сигналов сообщений для реализации линейной амплитудной характеристики усиления сигналов сообщений, если уровень сигналов сообщений выше второго порога, то формируют переменные энергетические предыскажения сигналов для реализации режима сжатия динамического диапазона усиливаемых сигналов и формирования нелинейной амплитудной характеристики соответствующего полосового канала обработки, например, логарифмического вида и уменьшения за счет этого роста нелинейных искажений, связанных с возможным резким ограничением амплитуды усиленного сигнала сообщений;
в зависимости от соотношения текущего уровня сигналов сообщений и установленного порога или порогов этих уровней формируют дополнительные сигналы управления состоянием усилителя, посредством которых изменяют уровень напряжения питания и/или режим работы усилителя, например переводят его из режима АВ в режим А.
Блок обработки выполняют хотя бы с одним дополнительным входом, на который подают электрические сигналы, сформированные вблизи источников помех, например переменное напряжение с одной из обмоток трансформатора, питающего усилитель, эти сигналы в блоке обработки подвергают одно- или многополосной обработке для формирования сигналов, предназначенных для активного понижения уровня этих сигналов в вышеуказанных каскадах усиления, на выходе усилителя или системы усилитель и излучатель, обработанные сигналы используют для формирования выходных сигналов блока обработки путем их суммирования с другими выходными сигналами блока обработки.
Поставленная задача изобретения решается тем, что в известном способе порогового шумоподавления электрических сигналов источника сообщений, заключающемся в автоматическом уменьшении коэффициента передачи электрических сигналов источника сообщений со входа на выход шумоподавителя в моменты времени, когда уровень сигнала источника сообщений ниже порогового, согласно изобретению входной сигнал шумоподавителя фильтруют для получения нескольких полосовых сигналов источника сообщений, число которых не менее двух, и хотя бы в двух из этих полос осуществляют пороговое шумоподавление компонентов электрических сигналов источника сообщений, обработанные таким образом сигналы используют для формирования выходных сигналов шумоподавителя.
Возможны варианты реализации способа, такие, что:
каждый многополосно обработанный сигнал дополнительно фильтруют при формировании выходных сигналов шумоподавителя для уменьшения уровня нелинейных и интермодуляционных искажений выходных сигналов шумоподавителя;
многополосно обработанные сигналы суммируют для получения одного или нескольких выходных сигналов шумоподавителя, предназначенных для их последующей обработки, например путем их усиления по мощности в усилителях сигналов.
Вышеописанные технические решения наполняют конкретным содержанием новый фундаментальный закон природы - ЗАКОН МИНИМИЗАЦИИ РОСТА ЭНТРОПИИ (система связи) или закона "сохранения" информации. Кавычки означают, что речь идет не об абсолютном сохранении информации подобно общеизвестным - классическим законам сохранения энергии и вещества, сформулированным и работающим в рамках физически никогда не реализуемой модели - кругового процесса, для которого, по определению, рост энтропии равен нулю, а о предельно возможном сохранении информации (параметров сигналов) в любой реальной физически реализуемой системе. Причем рост энтропии в системе "тормозится" за счет внешнего источника энергии (источника питания) и новой структурной схемы системы, обеспечивающей текущий анализ искажающих свойств всех элементов системы связи, включая и собственно сам канал связи. Использование сигналов обратной связи позволяет все время "рассчитывать" энтропию системы связи и компенсировать, насколько это возможно, рост энтропии.
В отличие от традиционных подходов расчета энтропии с использованием термодинамических понятий и категорий, в изобретении описан способ и соответствующие технические решения с использованием базовых категорий и понятий теории информации. Суть нового фундаментального закона природы раскрывается в этом изобретении с использованием более понятных для радиоспециалистов категорий: спектр сигнала, полоса частот, компоненты сигнала и их параметры.
Таким образом, использование методов многополосной обработки сигналов источника сообщений, сигналов обратной связи и сигналов различных источников шумов позволяют повышать точность передаваемых сообщений за счет практически покомпонентного анализа и обработки этих сигналов. Этот подход четко соответствует базовым положениям теории информации (спектральному анализу сигналов) и кибернетики (автоматизации прессов обработки сигналов с использованием обратной связи и соответствующих алгоритмов).
Указанные преимущества, а также особенности настоящего изобретения станут понятны во время рассмотрения приведенных ниже вариантов осуществления изобретения.
Краткое описание чертежей
Фиг.1-4 изображают обобщенные структурные схемы вариантов выполнения систем передачи сообщений по схеме с обратной связью и специальной обработкой сигналов.
Фиг.5, 6 - обобщенные структурные схемы блоков обработки сигналов систем, показанных на фиг.1-4.
Фиг.7 поясняет принцип автоматического формирования временных предыскажений при формировании сигналов для активного понижения сигналов любой физической природы, а в варианте - звуковых шумовых сигналов.
Фиг.8а), 8б) изображают схемы блоков обработки и их связи с другими узлами систем активного понижения уровня шума самолетов.
Фиг.9-12 также поясняют принцип работы систем понижения уровня шума самолетов в изобретении-аналоге.
Фиг.13а), 15б), 14, 15 изображают структурные схемы блоков обработки сигналов согласно изобретению.
Фиг.16 изображает один из возможных вариантов принципиальной электрической схемы блока обработки с многополосным формированием шумопонижающих сигналов.
Фиг.17, 18 изображают обобщенные структурные схемы блоков обработки сигналов для передачи сигналов любой физической природы в каналах с помехами и шумами согласно изобретению.
Фиг.19, 20 изображают примеры схемотехнического выполнения основных узлов блоков обработки сигналов согласно структурным схемам, показанным на Фиг.13-15, 17, 18, на примере анализа работы которых поясняются существенные признаки и их связи согласно формуле изобретения.
Фиг.21, 22 поясняют принципы многополосной обработки сигналов при формировании сигналов обратной связи в усилителях электрических сигналов, а также поясняют способы передачи сообщений в системе усилитель и излучатель, охваченные обратной связью согласно изобретению.
Лучший вариант осуществления изобретения
В технике известны различные подходы к решению задачи повышения точности передачи сообщений (информации) в каналах с помехами и шумами. Это связано не столько с различием возможной физической природы передаваемых сообщений, а сколько с разным общеметодологическим подходом к решению этой задачи и условиями ее постановки.
Известна группа изобретений, в которых решается эта задача. В основе этих изобретений лежат общеизвестные положения современной теории информации (кибернетики). Впервые, в виде обобщенного научного подхода, эти положения были сформулированы в книге Н.Винера "Кибернетика". Суть этой концепции заключаемся в том, что оптимальная система связи или управления должна быть построена по схеме с обратной связью и специальной обработкой передаваемых и принимаемых сообщений (сигналов, команд, действий и т.д.). Правомерность подобного подхода обоснована тем, что наиболее эффективное управление каким-либо процессом (в частности, процессом передачи сообщений) в живой и неживой природе подчиняется некоторым общим универсальным (фундаментальным) законам природы. В вышеуказанной группе изобретений как раз и найдены базовые технические решения, раскрывающие суть этого нового фундаментального закона природы - закона минимизации роста энтропии (системы связи или передачи сообщений) или, по-другому, - закона "сохранения" информации. Поэтому, прежде чем перейти к рассмотрению технических решений согласно изобретению, представляется целесообразным напомнить различные технические решения, раскрытые в вышеупомянутой группе изобретений. Эти технические решения, дополненные новыми существенными признаками, будут использованы в изобретении.
На фиг.1-4 показаны обобщенные структурные схемы различных вариантов систем с обратной связью. Эти системы содержат: источник 1 сигналов сообщений, блок 2 обработки сигналов, выполненный с возможностью осуществления различных операций над сигналами источника 1 и сигналами обратной связи - принятыми в точке (области) получения сообщений электрическими сигналами, усилитель 3, дополнительный усилитель 9, излучатель 4, дополнительный излучатель 10, зондирующее устройство 5, линию связи 6, посредством которой осуществляется передача принятого электрического сигнала обратной связи к месту его обработки, дополнительный фильтр 11. На фиг.1-4 также показаны канал 7 и дополнительный канал 12 связи с помехами 8. Параметры каналов 7 и 12, характеристики помех 8 и пространственные координаты точки приема сообщений, точек излучения являются случайными параметрами и могут меняться случайным образом. Считается, что форма тока (напряжения) передаваемого сигнала источника 1 является случайной функцией времени (процессом).
Системы с обратной связью (фиг.1-4) имеют в своем составе многофункциональный узел - блок 2 обработки сигналов. На его входы поступают электрические сигналы источника 1 и сигналы обратной связи. В этом блоке могут быть реализованы следующие операции над этими сигналами:
а) автоматический расчет и формирование уровней и/или задержек (фаз) сигналов источника 1 в различных полосах обработки сигналов. Другими словами, в этих полосах над отфильтрованными компонентами сигналов сообщений осуществляют действия по их энергетическим и временным предыскажениям. Подобные действия можно охарактеризовать как частотно-энергетические и/или частотно-временные предыскажения сигналов источника 1 сообщений. Они эквивалентны работе автоматического эквалайзера и/или автоматического корректора задержек (фаз) компонентов сигналов источника 1 сообщений;
б) автоматическое многополосное формирование сигналов для активного шумопонижения. Эта операция заключается в многополосной фильтрации принятых электрических сигналов обратной связи посредством полосовых фильтров, идентичных полосовым фильтрам, которые применяют для фильтрации сигналов источника 1. Эти сигналы обратной связи состоят из компонентов сигналов источника 1, искаженных в канале связи (искажаются энергетические параметры - уровни компонентов и временные параметры - расположение компонентов друг относительно друга во времени), а также из компонентов помех и шумов.
С помощью специальной обработки из многополосно отфильтрованных сигналов обратной связи формируют многополосные сигналы (компоненты) для активного понижения шумов и помех, уровни и фазы которых также оптимизируются автоматически и максимально возможно быстро для достижения наибольшего эффекта активного понижения этих помех в точке или области получения сообщения;
в) выходные сигналы блока 2 обработки формируются в результате различных комбинаторных вариантов суммирования многополосно обработанных сигналов источника 1 сообщений и многополосно сформированных сигналов для активного понижения шума.
Различные сочетания функциональных возможностей блока 2 обработки сигналов и вариантов построения обобщенных структурных схем систем для передачи сообщений позволяют реализовать различные варианты систем с обратной связью и специальной обработкой сигналов. Например, для решения задачи передачи сообщений в условиях полной неопределенности всевозможных параметров сигналов, помех и характеристик канала связи можно использовать структурную схему, показанную на фиг.1. Если в блоке 2 обработки сигналов осуществляется полнопараметрическая обработка сигналов, то систему (фиг.1) можно считать оптимальной. В этой системе на выходе блока 2 обработки формируется сложный, составной широкополосный сигнал. Он содержит как компоненты сигналов для активного понижения шума, так и компоненты предыскаженного информационного сигнала источника 1. Этот сигнал усиливается и излучается в канал до точки получения сообщения, в непосредственной близости от которой установлен приемный элемент зондирующего устройства 5, посредством которого формируется электрический сигнал обратной связи. С помощью дополнительной линии связи 6 этот сигнал передается к месту его обработки - в блок 2, в котором осуществляется вышеуказанная обработка сигналов и формируется выходной сигнал.
На фиг.2 показан вариант построения структурной схемы, в которой число выходных сигналов блока 2 обработки сигналов не менее двух. Дополнительные выходы блока 2 позволяют осуществлять варианты многополосного усиления и излучения компонентов как сигналов источника 1, так и компонентов сигналов для активного понижения шума.
Блок 2 обработки и источник сигнала может также быть выполнен с несколькими выходами, но уже для другой функции - для многоканальной передачи сообщений в области пространства его получения, например в стереосистемах или стереомногоперсональных (коллективных) системах, описанных в изобретении RU, A, 2145446.
В этом изобретении показано, что, если придерживаться общеизвестных положений кибернетики, то для одного человека (слушателя) на стадии записи и воспроизведения звуковых сообщений необходимо только два канала, а не 3, 4, 5 или даже 8, как это предлагается делать в ряде новейших систем высококачественного звуковоспроизведения фирм Alpine, Sony, Kenwood, Pioneer и др. за счет включения в состав блока обработки сигналов, например систем: Dolby Surround/Prologic, Dolby Digital (AC- 3), DTS, Dolby Digital Surround EX, Dolby Digital THX SorroundEX, Super Audio CD (SACD), PXA H900 (Alpine F#1 Status) (см., например, журнал "Мастер 12 Вольт", февраль-март 2002 г., стр.62-66).
Многополосный принцип передачи сигналов источника 1 можно также получить за счет дополнительной фильтрации выходного широкополосного сигнала блока 2 обработки - фиг.4, или за счет дополнительной фильтрации усиленного выходного сигнала блока 2 - фиг.5, что, по сути, требует выполнения над сигналами эквивалентных действий, но с конструктивно практической точки зрения не совсем удобно.
Фиг.2-4 представляют собой различные варианты реализации многополосных систем передачи сообщений.
Структурные схемы блоков обработки с одним или несколькими выходами показаны на фиг.5 и фиг.6 соответственно. Они могут содержать: устройство 13 управления, полосовые фильтры 14, блоки 15 для расчета и формирования уровней и/или задержек компонентов сигналов источника 1, блоки 16 формирования сигналов для активного понижения шумов, сумматор(ы) 17, фазовращатели 29, устройства 30 управления фазовращателями 29, вторые управляемые усилители 31. Блок 13 как вспомогательный узел показан схематично. Основная функция блока 13 заключается в управлении узлами блоков 15 при формировании одного из возможных алгоритмов, описанных в изобретениях-аналогах, при циклической корреляционной обработке сигналов в блоках 18, а также возможной оптимизации работы блоков 18 и 16.
Блоки 15 могут быть выполнены в виде блоков 18 и/или 19. В блоках 18 (за счет работы детекторов 25, фильтров низких частот 26, резисторов 27, выполняющих роль сумматора сигналов с выходов ФНЧ 26, и первых управляемых усилителей 28) осуществляется формирование (расчет, если соответствующие узлы реализованы не аппаратно, а виртуально - программным способом) уровней сигналов в каждой полосе обработки сигналов источника 1. В блоках 18 посредством блоков 20, 21, 22, 23, 24 осуществляется формирование предыскажающих задержек компонентов сигналов источника 1. За счет работы этих узлов осуществляется циклический корреляционный анализ компонентов сигналов сообщений, обратный перерасчет задержек этих компонентов, обеспечивающий выравнивание фаз компонентов сигналов в точке получения сообщения соответственно их временному расположению в сигнале передаваемого сообщения. На фиг.5 показан вариант реализации блока 2 обработки сигналов с единственным сумматором 17 для получения на выходе этого блока одного широкополосного сигнала. На фиг.6 введен дополнительный сумматор(ы) 17 для формирования нескольких выходных сигналов блока 2 обработки и реализации много полосного способа передачи сообщений.
Работа и взаимодействие всех узлов систем, показанных на фиг.1-4, и узлов блоков 2 обработки сигналов общеизвестна. В качестве блока 2 может использоваться специализированное микропроцессорное устройство или ЭВМ, например персональный компьютер (ПК) с соответствующим программным обеспечением, а также устройства ввода (АЦП) и вывода (ЦАП) информации (например, звуковых сигналов). Конструктивно эти устройства могут быть объединены в единый блок (например, центральный процессорный блок управления системами автомобиля или самолета, многофункциональное звуковоспроизводящее устройство для автомобиля) или быть распределены по отдельным функциональным модулям или блокам системы.
Как уже отмечалось, в зависимости от функциональных возможностей блока 2 обработки, возможны различные варианты формирования его выходных сигналов в результате общего или погруппового суммирования многополосно обработанных сигналов:
- суммируются многополосно обработанные только по уровням сигналы источника 1;
- суммируются многополосно обработанные только по задержкам сигналы источника 1;
- суммируются многополосно обработанные по уровням и по задержкам сигналы источника 1;
- суммируются многополосно обработанные по уровням сигналы источника 1 и многополосно сформированные сигналы для активного понижения шума;
- суммируются многополосно обработанные по уровням и задержкам сигналы источника 1 и многополосно сформированные сигналы дли активного понижения шума;
- суммируются многополосно обработанные по задержкам сигналы источника 1 и многополосно сформированные сигналы для активного понижения шума;
- суммируются многополосно сформированные сигналы для активного шумопонижения.
Последний из вариантов выполнения блока 2 обработки относится не к системе передачи сообщений в условиях шумов и помех, а к системе активного понижения шума. Обобщенные структурные схемы различных вариантов систем шумопонижения получаются из схем, показанных на фиг.1-4, путем исключения из их состава сигнала источника 1 и ряда узлов из структурных схем блоков 2 обработки, показанных на фиг.5, 6. Действительно, если в область пространства понижения шума стараться "передавать" сообщение нулевого уровня ("тишину"), подав на 2 вход блока 2 сигнал обратной связи, сформированный в области понижения шума, а на 1 вход - принятый шумовой сигнал с предварительно подобранными параметрами, то можно из структурных схем блоков 2 обработки (фиг.5, 6) исключить узлы 20, 21, 22, 23, 28 в цепях прохождения сигнала источника 1. В системе понижения шума эти блоки просто не нужны. Таким образом, структурная схема блока 2 обработки сигналов может содержать фильтры 14 (по входам блока 2), детекторы 25, ФНЧ 26, фазовращатели 29, устройства управления фазовращателями 30, вторые управляемые усилители 31 и сумматор(ы) 17. Ниже этот вариант будет рассмотрен более подробно. Завершая общий обзор известных технических решений систем с обратной связью, напомним принцип автоматического формирования сигналов для активного понижения шумов, воспользовавшись фиг.7. На ней показан управляемый фазовращатель 29, содержащий многопозиционный управляемый переключатель 32 и первые дополнительные линии задержки 331, 332,.., 33. Выходы первых дополнительных линий задержек 35 связаны со входами управляемого многопозиционного переключателя 32. Величина задержек может быть выбрана с некоторым шагом, например постоянным или переменным. Устройство 30 управления фазовращателем 29 содержит: вторую дополнительную линию задержки 34, дополнительные детекторы 35, дополнительные ФНЧ 36, дополнительную схему сравнения 37. Входом устройства 30 является общий вход двух ветвей, в одной из которых последовательно связаны первый дополнительный детектор 35 и первый дополнительный ФНЧ 36, в другой - последовательно связаны друг с другом вторая дополнительная линия задержки 34, второй дополнительный детектор 35 и второй дополнительный ФНЧ 36. Выходы дополнительных ФНЧ связаны со входами дополнительных схем сравнения 37.
Работает фазовращающее устройство (фиг.7) следующим образом. Многопозиционный управляемый переключатель 32 осуществляет последовательное переключение контактов в прямом по отношению к номерам линий задержек или в обратном порядке. Управление переключателем 32 осуществляется сигналом с выхода дополнительной схемы сравнения 37 по правилу: при поступлении очередного сигнала порядок переключения линий задержек 33 изменяется на обратный. В устройстве 30 сигнал шума и задержанный на время τ34 сигнал шума детектируются и интегрируются в разных цепях, образуя входные сигналы для дополнительной схемы сравнения 37 (компаратора). Выходной сигнал схемы сравнения 37 формируется, если уровень задержанного сигнала становится больше уровня незадержанного сигнала. Это означает, что введенная на очередном шаге экспериментального подбора фазы шумопонижающего сигнала задержка стала уже неоптимальной, и необходимо начать подбор фазы в обратную сторону. Эти действия эквивалентны исследованию фазового параметра на экстремум, а точней, исследование на экстремум функции шума, являющейся суперпозицией (суммой) шумового и шумопонижающего сигналов. Этот метод позволяет автоматизировать процесс экспериментального подбора фазы сигналов для активного шумопонижения, обеспечивающий наибольший шумопонижающий эффект (минимум функции шума).
В блоке 31 формируется оптимальный уровень сигналов для активного понижения шума. Этот уровень также приводит к наибольшему шумопонижающему эффекту. Понятно, что, выбрав различные постоянные времени процессов автоматического подбора фазы и уровня, можно развязать последовательность оптимизации энергетических и временных предыскажений сигналов для активного понижения шума во времени. Например, выбрав постоянную времени регулирования уровней сигналов на порядок большую, чем постоянная времени оптимизации фазового параметра, можно во время относительно медленных регулировок уровня шумопонижающего сигнала успевать все время подбирать фазу этого сигнала, обеспечивающую минимально возможный уровень шума в области его понижения. Если в области пространства получения сообщений (вблизи зондирующего устройства 5) присутствуют только помехи, а полезного информационного сигнала нет, то управляющий работой блока 31 сигнал формируется только за счет текущего уровня компонентов шумов в соответствующей полосе частот их анализа и обработки. Чем выше уровень этих шумовых компонентов, тем больше коэффициент передачи блока 31 и наоборот. Динамический диапазон регулирования коэффициента передачи блока 31 и диапазон регулирования фазы или задержек определяет возможности системы по понижению шумов в различных прикладных задачах. Используя информацию о параметрах канала связи и шумах, можно, например, ограничить динамический диапазон регулировок уровней и фаз формируемых сигналов вплоть до полного прекращения этих регулировок и за счет этого ускорить процесс поиска оптимальных предыскажений сигналов. Например, если известно, что помеха имеет квазистационарный характер, геометрические параметры системы остаются практически неизменными, есть априорная информация о спектрах сигналов и помех, то возможна и даже целесообразна замена автоматических узлов для подбора уровней и фаз формируемых сигналов на неавтоматические. Предварительно настроив систему передачи сообщений или шумопонижения и зафиксировав предыскажающие сигналы регулировки, можно решить соответствующую задачу, но для большинства прикладных задач теории информации этот упрощенный вариант не годится. Поясним это на примере решения задачи понижения уровня шума авиамоторных средств (самолетов или вертолетов).
На Фиг.8 показано устройство для формирования сигналов для активного понижения шума, описанное в изобретении JP, А, 52-13721 автора Хориды Акиры. Оно состоит из блока 2 обработки принятых шумовых сигналов 8 от источника шума посредством микрофона 0. Блок 2 обработки выполнен в виде транзистора, на вход которого подается шумовой сигнал с микрофона 0. Противофазные шумовые сигналы с эмиттера и коллектора транзистора поступают на узел формирования выходных сигналов блока 2 обработки. В этом узле формируются сигналы для активного понижения шума. Эти сигналы поступают либо на динамик 4 - в одноканальной системе, либо через усилители 5, 9 на динамики 4, 10 - в многоканальной системе понижения шума самолета. Звуковые шумопонижающие волны распространяются во все стороны от самолета, как показано на фиг.9-11. На фиг.12 показаны спектры шумового сигнала - кривая а) и шумопонижающего сигнала - кривая б), а также вид спектра шумового сигнала на земле - в области пространства его понижения - кривая с). Показанные на фиг.12 энергетические спектры сигналов не совсем точно отражают их реальный вид. Спектры принятого шумового сигнала вблизи микрофона 0 и в различных областях пространства на земле могут очень сильно отличаться за счет различия фаз компонентов шумов, обусловленных пространственной распределенностью различных шумящих узлов и агрегатов самолета. Пространственно распределенные источники шума создают звуковые шумовые волны, которые приходят к точке расположения микрофона на самолете и в область пространства на земле с разными энергетическими и фазовыми (временными) параметрами, причем временные задержки отдельных компонентов могут отличаться очень сильно и составлять единицы и даже десятки длин волн. Поэтому в результате обработки сигналов, описанной в вышеуказанной заявке, можно подобрать уровни и фазы шумопонижающих сигналов для очень узкой полосы частот. Эти предыскажения для других частот уже будут неоптимальны, и вместо эффекта понижения шума может наблюдаться противоположный эффект - эффект усиления шума. Шумопонижающий эффект для узкой полосы частот также будет обеспечиваться в некотором телесном угле и в соответствующей площади на земле. Для других точек пространства на земле этого эффекта может и не быть, а наоборот, может иметь место усиление шума за счет синфазного сложения шумовых и шумопонижающих волн. В силу этого обстоятельства невозможно методами активного понижения шума обеспечить шумопонижающий эффект во все стороны от самолета, как показано на фиг.8б).
Описанный в этом изобретении метод активного понижения шума представляет интерес исключительно в плане возможности обеспечения высокой развязки между принимаемыми шумовыми сигналами и излучаемыми в область пространства понижения шума шумопонижающими сигналами. Для устранения вышеуказанных недостатков этой системы необходимо использовать более совершенный вариант реализации блока 2 обработки принятых шумовых сигналов. В этом блоке целесообразно использовать методы полосовой обработки сигналов, в которых автоматически или неавтоматически должны подбираться фазовые и энергетические параметры сигналов, обеспечивающие эффект понижения шумов и повышение точности передаваемого сообщения в соответствующую область пространства получения сообщения. Чтобы обеспечить гарантированный шумопонижающий эффект, необходимо знать, где расположена область понижения шума и/или получения сообщения, какую форму она имеет, и в связи с этой информацией необходимо выбрать высшую частоту формируемых сигналов для активного понижения шума. Это следует из того, что, если для высших частот шумопонижающий эффект будет наблюдаться в некоторой локальной области пространства, то он также будет и для всех частот ниже высшей частоты, поскольку длины волн этих частот больше, и для них предельные размеры области гарантированного понижения шума увеличиваются. Указанное выше ограничение полосы частот шумового спектра можно реализовать посредством фильтра 14. В качестве этого фильтра можно использовать ФНЧ или ПФ. Для различных задач размеры области понижения шума (получения сообщения) могут отличаться, также как и местоположение точек приема и излучения сигналов. Для ряда из этих задач может потребоваться многополосный анализ и подбор параметров сигналов внутри вышеуказанной полосы частот шумового спектра. Поэтому связь между точками приема, излучения сигналов, высшей частотой формируемых сигналов и размерами, формой и местом положения области пространства понижения шума можно считать существенными признаками, указав их в формуле изобретения.
Например, если обеспечить шумопонижающий эффект в ограниченной полосе частот от 20 до 50 Гц в определенном направлении по отношению к самолету (например, "вниз") в соответствующем телесном угле, то проекция этого телесного угла на земную поверхность, а следовательно, размеры, форма и местооположение области пространства понижения шума будут меняться по отношению как к точке приема шумовых сигналов на самолете, так и к излучателям (громкоговорителям) шумопонижающей системы.
Если высшую частоту шумопонижающих сигналов изменить, например, уменьшив ее с 50 Гц до 40 Гц, то соответственно изменится телесный угол, в котором шумовые и шумопонижающие волны дают суммарный шумопонижающий эффект. Этот телесный угол и его проекция на земле увеличатся, и эффект понижения шума на частотах от 20 до 40 Гц будет в области пространства на земле больших размеров и скорей всего другой формы, поскольку земная поверхность имеет рельефную поверхность. В этой области пространства шумопонижающего эффекта на частотах от 40 до 50 Гц уже не будет. Таким образом, ограничение полосы сигналов для активного понижения шумов приводит к увеличению размеров области пространства гарантированного шумопонижения. Понятно, что этот эффект можно использовать в различных прикладных задачах вне зависимости от физической природы шумовых сигналов, процессов, полей и т.д. Поэтому при формулировке соответствующего способа понижения шума или передачи сообщений можно использовать предельно обобщенную формулировку существенного признака в виде: "сигналы любой физической природы". Для удобства изложения технических решений в качестве таких сигналов в дальнейшем будут использованы звуковые сигналы (сообщений и помех). В формуле изобретения эти технические решения будут указаны в зависимых пунктах как один из возможных вариантов выполнения вышеуказанного обобщенного признака.
Если спектры сигналов в области пространства понижения шума или получения сообщения и точке приема шумовых сигналов имеют почти постоянные отличия, то эти отличия можно компенсировать посредством многополосной обработки шумовых сигналов, осуществляя неавтоматические частотно-энергетические и частотно-временные предыскажения принятых шумовых сигналов.
На фиг.13а) показан вариант реализации блока 2 обработки сигналов для многополосной неавтоматической обработки компонентов шумовых сигналов при формировании сигналов для активного понижения шума. Этот вариант можно использовать, например, при решении задачи понижения уровня шумов на авиатранспорте, автотранспорте или железнодорожном транспорте. Установив микрофон или микрофоны 0 для приема шумовых сигналов вблизи источников шумов (двигателей, выхлопной трубы, колес и т.д.), можно путем экспериментального подбора энергетических и временных параметров компонентов шумовых сигналов, а также подбора местоположения микрофонов и излучателей сигналов сформировать сигналы для активного понижения шума в местах наиболее вероятного нахождения людей, например близи слуховых органов человека, сидящего в этом транспортном средстве. Понятно, что поскольку у человека два органа слуха, то область пространства понижения шума должна представлять собой две локализованные области пространства вблизи каждого из органов слуха. Учитывая, что голова пассажира или водителя транспортного средства практически не смещается в пространстве на значительные расстояния в течение большей части времени поездки, то, ограничив размер локальных областей, например сферами с радиусом порядка нескольких сантиметров, можно высшую частоту шумопонижающих сигналов увеличить примерно до килогерца и эффективно понизить уровень шумов на нижележащих частотах путем подбора частотно-энергетических и частотно-временных параметров компонентов шумовых сигналов. При достаточно большом числе полос обработки шумовых сигналов (порядка 50-100) предельный уровень снижения шума может составить порядка 55-40 дБ. Этот уровень будет определяться, в основном, продуктами нелинейных и интермодуляционных искажений, которые возникают в громкоговорителях шумопонижающих систем. В системах HI-End класса искажения громкоговорители составляют порядка 1-3%. Расположение приемного микрофона вблизи источника шума, а излучателей шумопонижающих сигналов вблизи органов слуха человека обеспечивают высокий уровень развязки принимаемых и излучаемых сигналов, а также возможность точной синхронизации во времени шумовых и шумопонижающих сигналов в области пространства понижения шума вблизи органов слуха человека. Помимо двухканальных шумопонижающих систем возможны варианты, при которых шумопонищающий сигнал для каждой локальной зоны пространства понижения шума формируют из одного принятого шумового сигнала, или вариант, при котором для каждого канала или группы каналов, например пассажиров, сидящих в одном ряду, осуществляют прием нескольких шумовых сигналов. С меньшей эффективностью понижения шума можно также использовать и одноканальный способ понижения шума на более низких частотах шумового спектра.
На фиг.13б) показан вариант реализации блока 2 для многополосной неавтоматической обработки компонентов шумовых сигналов и сигналов сообщений. Подбор параметров сигналов сообщений, компенсирующих искажения, возникающие в канале связи, осуществляют посредством узлов 28, 20, 24. Как видно из сопоставления схем, показанных на фиг.5, 6 и фиг.13а), б), неавтоматические варианты подбора частотно-энергетических и частотно-временных предыскажений сигналов сообщений и помех получаются из общеизвестных путем исключения ряда узлов, отвечающих за автоматизацию этих процессов. Если спектр сигнала шума в области пространства его понижения может случайно и весьма сильно изменяться по отношению к спектру источника шума, то необходимо в области пространства понижения шума (или получения сообщения) установить приемный элемент зондирующего устройства 5 для дополнительного приема шумового сигнала. Этот сигнал является сигналом обратной связи и позволяет в автоматическом режиме формировать сигналы для активного понижения шума. В этом варианте блок 2 обработки содержит дополнительные узлы, позволяющие автоматизировать действия по подбору уровней и/или фаз многополосно формируемых компонентов сигналов для активного понижения шума, а также действия по запоминанию и формированию энергетических и временных предыскажений, обеспечивающих эффект понижения шума и повышения точности передаваемого сообщения. На фиг.14, 15 показаны варианты реализации автоматических блоков обработки принятых шумовых и дополнительно принятых сигналов. Возможны варианты, когда автоматически корректируются только временные или энергетические параметры принятых шумовых сигналов, или имеет место ограничение диапазона осуществления регулировок. Например, подстройка фазы может осуществляться в диапазоне ±30°, а уровня компонентов сигналов - в диапазоне ±6 дБ. Подобные варианты целесообразно использовать, если имеется информация об изменениях спектров сигналов. Используя возможные комбинаторные варианты суммирования многополосно обработанных принятых шумовых сигналов и сигналов сообщений, можно реализовать: а) одноканальные - широкополосные или многополосные; б) многоканальные широкополосные или многополосные варианты систем, позволяющие формировать одно- или многоместно локализованные области пространства получения сообщений и понижения шума. При практической реализации подобных систем можно воспользоваться промышленно производимыми устройствами, которые позволяют в нескольких каналах осуществлять действия по подбору энергетических и временных параметров сигналов, а также осуществлять многополосную фильтрацию сигналов. Например, воспользовавшись устройством для обработки сигналов - процессором РХА-900 фирмы Alpine можно реализовать ряд вышеописанных технических решений или использовать более простые устройства, реализованные на базе современных операционных усилителей (ОУ). Пример подобного варианта выполнения блока 2 обработки шумовых сигналов показан на фиг.16.
Входной четырехполосный фильтр выполнен на ОУ D1 и позволяет сформировать четыре пол-октавные полосы обработки шумовых сигналов, настроенные, например, на 30, 45, 60, 90 Гц. Временные корректоры выполнены в виде фазовращателей на ОУ D 2. Регуляторы уровней компонентов шумовых сигналов в полосах их обработки выполнены в виде подстроечных резисторов R 7, 16, 24, 32. Сумматор 17 выполнен на ОУ Р 3. Подстроечные резисторы R 2, 14, 19, 27 предназначены для настройки фильтров 14 на вышеуказанные частоты. Расчет параметров полосовых фильтров 14 проводят по общеизвестным методикам. Параметры емкостей и резисторов фильтров подбирают с точностью до 1%. Резисторы R 6, 15, 23, 31 служат для регулировки фазы компонентов принятых шумовых сигналов. Для конкретной задачи понижения шумов экспериментально находят места расположения приемного элемента зондирующего устройства 5 (микрофона 0) и излучателей 4, 10, обеспечивающих максимально возможный шумопонижающий эффект. Например, приемный микрофон 0 устанавливают в моторном отсеке автомобиля, а громкоговорители - в заднюю полку или боковые двери автомобиля. Полосу частот понижения шума также выбирают исходя из конкретных условий. В данном примере полоса частот эффективного понижения шума составляет порядка 20÷120 Гц. Понятно, что высшая частота может быть скорректирована в зависимости от решаемой задачи 4 конкретного типа транспортного средства. С помощью подобных блоков 2 обработки сигналов можно создавать множество локализованных областей пониженного шума, например, вблизи голов пассажиров самолетов, автомобилей, поездов - в местах их наиболее вероятного нахождения. В этом случае блок 2 обработки сигналов выполняется в виде, например, однотипных блоков 2 обработки, показанных на фиг.16. Если решается задача понижения шума вне транспортного средства, например самолета, то многоканально или многополосно излучая звуковые шумопонижающие сигналы с заранее подобранными предыскажающими регулировками их параметров, можно формировать своеобразную шумопонижающую диаграмму в определенную сторону, например "вперед" и "вниз" при подлете к аэропорту. Понятно, что законы, по которым формируется эта шумопонижающая диаграмма самолета, во многом аналогичны законам формирования излучений в радиодиапазоне. Как для радиосигналов, так и для звуковых сигналов (волн) вид этой диаграммы может иметь "игольчатую" форму или быть многолепестковым, например "вперед" и "вниз" или "вперед" и "вбок", и т.д. Для формирования подобных диаграмм необходимо экспериментально подобрать оптимальные предыскажения шумовых сигналов, которые обеспечивают требуемый вид этой диаграммы, Для этого можно использовать, например, следующую методику. На земле с определенным шагом (100-500 м) устанавливаются в линию или квадратами измерительные микрофоны, над которыми пролетает самолет с включенной системой понижения шума. При этом вышеуказанные энергетические и временные предыскажения в полосах обработки сигналов автоматически переключаются с некоторой частотой и по известному алгоритму. В результате этих переключений осуществляется тотальный перебор всех возможных комбинаций энергетических и временных предыскажений. В результате образуется некоторый массив данных в виде ансамбля реализации звуковых сигналов, записанных микрофонами на земле. При использовании любого из известных методов синхронизации записей этих реализаций с траекторией пролета и скоростью самолета, а также с последовательность вышеуказанных переключений предыскажений сигналов при формировании шумопонижающих сигналов, можно обработать эти данные и установить, при каких предыскажениях шумовых сигналов имеет место наибольший шумопонижающий эффект в требуемую сторону, или наоборот, какие необходимо сформировать предыскажения, чтобы в заданную область пространства по отношению к самолету обеспечить минимальный уровень шума. При этом, чтобы уменьшить объем исследований, можно осуществить грубые, предварительные исследования на земле, вокруг неподвижно стоящего самолета. Эти исследования можно также использовать при формировании шумопонижающих диаграмм во время выруливания самолета на взлетную полосу, взлете или посадке самолета для понижения уровня шума в направлении аэропорта. Возможны и другие методики, например при пространственном облете самолета на другом самолете и регистрации уровня шума в нужном направлении и соответствующего подбора предыскажающих регулировок с координацией этих действий по радиосвязи.
Техническая реализация узлов, показанных на фиг.14, 15, может быть различной - аппаратной, с использованием, например, ОУ, или виртуальной, с использованием ЭВМ (ПК). Например, узлы 33, 34, 37, показанные на фиг.7, могут быть реализованы на базе ОУ, а переключатель 32 можно реализовать в виде простейшего электромеханического (пошагового) переключателя с электромотором, на который с выхода схемы 37 подается напряжение различной полярности, определяющее направление переключений переключателя 32 или в эквивалентном электронном виде с использованием мультиплексора. Но намного практичней эти узлы выполнить виртуально - в виде соответствующих подпрограмм типа: "линия задержки с постоянным или переменным временем задержки", "интегратор", "детектор", "компаратор", "переключатель" и т.д. Основные преимущества виртуального способа обработки сигналов общеизвестны: высокая точность повторяемости большого числа однотипных модулей (например, фильтров 14), уменьшение размеров, энергопотребления блоков 2 обработки, низкая себестоимость производства программного продукта по сравнению с его аппаратным аналогом. Второй управляемый усилитель 31 также может быть выполнен любым известным способом: в виде аналогового управляемого усилителя, аттенюатора или виртуального узла - соответствующего оператора или функции.
Рассмотренные выше варианты реализации различных способов понижения шума (уровня сигналов любой физической природы) позволяют перейти к рассмотрению способов передачи сообщений и снижения шумов согласно изобретению.
Эти способы целесообразно изложить на примере передачи звуковых сообщений, что связано с тем, что звукотехнику, как и радиосвязь, можно считать лидерами по числу известных способов передачи сообщений, разнообразных вариантов постановки этих задач и их решения. Если в радиосвязи в промышленное производство внедряются технические решения, как правило, строго соответствующие общеизвестным положениям теории информации и кибернетики, то в звукотехнике, и в частности, в бытовой, это не всегда имеет место быть. Эта тенденция уже стала заметна даже для неспециалистов. Например, взыскательные потребители высококачественно звуковоспроизводящей техники не могут понять, зачем производители Sony и Philips увеличили частотный диапазон новейшей своей системы SACD до 100 кГц, а соотношение сигнал/шум до 120 дБ. Общеизвестно, что здоровый, молодой человек с хорошим слухом просто физически не может слышать звуковые колебания на частотах выше 20÷24 кГц, пожилые люди, как правило, не слышат звуки частотой свыше 10÷12 кГц, а в реальных акустических условиях бытового (жилого) помещения или автомобиля слушатель, в принципе, никогда не сможет услышать тихие звуки, воспроизводимые этой системой практически на пороге слуховых возможностей человека, из-за значительно более высокого уровня помех или шумов. Уровень этих шумов в жилом помещении составляет порядка 30÷80 дБ, а в автомобиле порядка 50÷100 дБ, Без специальных мероприятий по борьбе с помехами и шумами использование системы с динамическим диапазоном в 120 дБ логически не оправдано. Кроме того, большинство записанных фонограмм, пластинок или компакт-дисков имеют соотношение сигнал/шум (помеха) не более 50÷90 дБ. Записи с реальным соотношением сигнал/шум (помеха) в 120 дБ получить практически невозможно даже в студийных условиях. Такое соотношение сигнал/шум достижимо только в условиях искусственно синтезированных звуков, например, с использованием электронных синтезаторов совместно с системами шумопонижения электрических сигналов источников 1 сообщений. Еще больше вопросов возникает у состоятельных покупателей, когда им предлагают приобрести звуковоспроизводящую аппаратуру так называемого HI-End класса по цене, например, в 38000 долларов США за однотактный ламповый усилитель фирмы Wavac HE-805, собранный на лампах, разработанных в 50-х годах двадцатого столетия, или регулятор громкости той же фирмы ATT-Q по цене в 6900 долларов США, функция которого состоит только в регулировке уровня сигнала. Не меньше удивления вызывают бесконечные споры и разговоры о том, какой усилитель лучше, ламповый или транзисторный, споры о целесообразности использования в усилителях мощности отрицательной обратной связи или подключения громкоговорителей к усилителю специально разработанными для этих целей проводниками, стоимость которых сопоставима со стоимостью усилителя, и которые без нагрева способны выдерживать токи в десятки и даже сотни Ампер. Удивляют также последние тенденции в аудио- и видеотехнике по использованию широкоформатного изображения, на котором стандартный формат потребитель видит в сильно приплюснутом, искаженном виде, дополненном в так называемых "домашних кинотеатрах HI-End класса" немыслимым числом звуковых каналов и звуковых псевдоэффектов. Из каких положений современной теории информации следуют эти усовершенствования и выдаются за полезные новейшие технические решения, которые потребитель должен дополнительно оплачивать, совершенно не понятно. Современные методы обработки звуковых сигналов для получения псевдоакустических эффектов и некоторые методы по борьбе с шумами никак не вяжутся с общеизвестными положениями современной теории информации. Одним из таких подходов является, например, способ автоматического регулирования громкости в зависимости от фоновых шумов в автомобильном CD-ресивере San Francisco CD 70 фирмы Blaupunkt (BOSCH). В результате автоматизации регулирования громкости слушатель получает звуковую информацию в сильно искаженном виде. Сигналы звукового сообщения модулируются в этом устройстве усредненным уровнем шума, что заметно на слух, раздражает слушателя неустойчивостью громкости звучания и не позволяет прослушивать сообщения на желаемом уровне громкости. В результате работы этой системы общий, суммарный уровень звуковых сигналов сообщений и шума резко возрастает, что приводит к утомляемости водителя. Повышается аварийность на автотранспорте при эксплуатации подобных систем. Эта система не решает по существу задачу снижения уровня шума, что необходимо делать в соответствии с современными научными положениями теории информации. Вместе с тем, в этой системе реализована функция, позволяющая автоматизировать регулирование АЧХ по звуковому давлению при различных акустических свойствах салона автомобиля. Эта функция соответствует современным положениям теории информации, запатентованным в вышеописанной группе изобретений с обратной связью, и позволит реально повышать точность передаваемого сообщения в область пространства его получения. Учитывая достаточно высокий уровень технической и коммерческой проработки этого технического решения, представляется целесообразным в качестве прототипа новых способов и систем для передачи сообщений любой физической природы выбрать систему San Francisco фирмы Blaupunkt. Дополнив ее техническими решениями по активному понижению шумов, можно реализовать более совершенное и безопасное устройство высококачественного воспроизведения звуковых сигналов, предназначенное для установки на автотранспортные или другие транспортные средства (самолеты, поезда, корабли и т.д.).
В рамках задачи настоящего изобретения целесообразно также рассмотреть ряд частных задач, направленных на повышение точности передаваемого сообщения за счет усовершенствования ряда действий и соответствующих узлов системы передачи сообщений, входящих в состав изобретения в качестве его частей. Совокупность всех этих технических решений и будет являться предметом изобретения.
Общая идея настоящего изобретения состоит в том, что более совершенные способы передачи сообщений при наличии помех можно получить путем разнообразных комбинаторных сочетаний описанных выше известных способов понижения шумов и известных способов передачи сообщений.
Новым, принципиально важным моментом, необходимым и достаточным для объединения этих технических решений, является то, что предварительный подбор уровней и фаз сигналов для активного понижения шума необходимо осуществлять при нулевом уровне электрических сигналов источника 1 или при уровне сигналов источника 1 ниже наперед заданного - ниже определенного порога. Далее будет показано, что это условие не является тривиальным и очевидным для специалистов, явно следующим из уровня техники, хотя бы по тому, что для работоспособности подобных систем необходима реализация вышеуказанного условия на уровне алгоритма настройки системы и выполнения соответствующих действий и включения в состав системы новых узлов, позволяющих, например автоматизировать реализацию этого условия. В противном случае сигналы сообщений будут являться помехами по отношению к системе понижения шума, и любой из вариантов настройки системы понижения шума станет невозможен.
Вышеуказанное условие при неавтоматическом варианте реализации энергетических и временных или частотно-энергетических и частотно-временных предыскажений сигналов достигается в результате соответствующей методики (последовательности действии) - осуществления подбора регулировок уровней и фаз сигналов сообщений и сигналов для активного понижения шумов. Сначала осуществляют настройку системы шумопонижения, например, при выключенном источнике сигнала, а затем уже осуществляют подбор предыскажений сигналов источника 1 сообщений, если источники шума невозможно отключить. При реализации автоматических вариантов систем понижения шума и передачи сообщений потребуются соответствующие узлы, связанные по определенным, новым связям с другими узлами блока 2 обработки сигналов. Функциональное предназначение этих узлов состоит в том, чтобы определять моменты времени, когда уровень сигнала источника 1 сообщений станет ниже наперед заданного, и начиная с этого момента времени включить в работу узлы, позволяющие автоматизировать процессы подбора энергетических и временных параметров сигналов для активного понижения шума. В другие моменты времени ранее подобранные параметры сигналов (соответствующие регулировки уровней и фаз компонентов сигналов), обеспечивающие оптимальные предыскажения шумовых сигналов, сохраняются в памяти блока 2 обработки и поддерживаются до очередной их автоподстойки при низком уровне сигнала источника или его компонентов в соответствующей полосе обработки сигналов. Данный подход можно реализовать при анализе уровня сигнала источника 1 как во всей полосе, осуществляя автоматический подбор параметров сигналов для активного понижения шума, например перед передачей сообщений или в паузах между блоками информационных сообщений (песнями, словами и т.д.), или непосредственно в процессе передачи сообщений, анализируя многополосно отфильтрованные компоненты сигналов сообщений во временной и частотных областях. Когда уровень компонентов сигналов сообщений в данной полосе анализа ниже наперед заданного порога в соответствующей полосе частот, может автоматически осуществляться автоподстройка параметров сигналов для активного понижения шума. В других полосах анализа, где уровень компонентов сигналов источника 1 сообщений в это время выше порога, шумопонижающие компоненты формируются за счет ранее подобранных предыскажений. Уровни и фазы (времена задержек) в это время остаются неизменными. Понятно, что порог, относительно которого происходит переход с неавтоматического варианта понижения шума на автоматический, можно варьировать и тем самым осуществлять дополнительную оптимизацию работы системы в непредсказуемых условиях передачи сообщений. Критерием подобной оптимизации также может быть выбран критерий минимума СКО сигналов передаваемого сообщения на выходе источника 1 сигнала и сигнала в точке получения сообщений (например, на выходе зондирующего устройства 5). Эту дополнительную, оптимизационную функцию блока 2 обработки сигналов схематично можно отнести к функциям блока управления 15, показанного на фиг.5, 6.
С методологической точки зрения тот же подход можно использовать для повышения точности передачи сообщений при их прохождении через ряд элементов системы передачи сообщений, например при их усилении в усилителях (3, 9) или при их прохождении через подсистему усилитель (3,9), связанный с излучателем (4, 10). Передача сообщений в этих подсистемах также может быть усовершенствована с использованием, например, многополосной обработки сигналов сообщений и многополосной обработки сигналов обратной связи, формируемых с выхода усилителя (3, 9) или хотя бы одного из его каскадов, или сигналов обратной связи, формируемых вблизи излучателя (4, 10). Принцип многополосной обработки сигналов и использование блока 2 обработки по новому назначению позволяет рассматривать эти новые технические решения как самостоятельные изобретения, позволяющие решать задачу изобретения. Причем ряд частных вариантов выполнения блока 2 обработки сигналов позволяет усовершенствовать общеизвестные схемы шумоподавителей электрических сигналов, например реализовать принципиально новый многополосный пороговый принцип (способ) понижения шума и соответствующее устройство для его реализации.
Для пояснения вышесказанного воспользуемся фиг.14, 17, 18, 19.
На фиг.14 показан один из возможных вариантов выполнения блока 2 обработки сигналов источника 1 сообщений и принятых шумовых сигналов, уровни и фазы компонентов которых устанавливаются автоматически. Сигналы источника 1 сообщений подаются на 2 вход (регулятор уровня или громкости R 1). Принятые вблизи конкретного источника шума сигналы подают на 1 вход блока 2 обработки сигналов. Один из возможных вариантов выполнения системы можно получить путем исключения узлов 25 и 26, показанных на фиг.14 (15) пунктиром.
Чтобы сигналы источника 1 не представляли собой помеху шумовым компонентам, в процессе автоматического формирования сигналов для активного понижения шума за счет работы узлов 29, 30, 31 можно путем дополнительной фильтрации сигнала источника 1 их развязать в частотной и во временной областях. Дополнительная селекция сигналов источника 1 сообщений, например, с помощью ФВЧ (14') с частотой среза, например в 100 Гц и фильтрация принятых шумовых сигналов с помощью ПФ (14R) на частотах ниже 100 Гц обеспечивает выполнение вышеуказанного условия (на уровень сигнала источника) в любой момент времени. Сигнал источника сообщений в любой момент времени не будет являться помехой для системы автоматического понижения шума, работающей на частотах ниже 100 Гц и обеспечивающей в соответствующей области пространства эффект понижения шума. В качестве ФВЧ (14') можно использовать ФВЧ, например, шестого порядка или заменить его на ПФ с полосой пропускания 300÷3000 Гц в речевых информационных системах передачи сообщений на транспорте, в аэропортах, вокзалах и т.д.
Вариант, показанный на фиг.14, имеет существенный недостаток. Происходит потеря информационных сообщений на частотах понижения шума. Для высококачественного звуковоспроизведения подобные системы не годятся. Этого недостатка лишены варианты реализации блоков 2 обработки сигналов, показанные на фиг.17, 18.
На фиг.17 показан вариант реализации блока 2 обработки с функциями автоматического подбора энергетических и временных предыскажений компонентов передаваемого сообщения и неавтоматических предыскажений компонентов сигналов для активного понижения дума. Система с использованием блока 2 обработки согласно фиг.17 требует предварительной настройки по следующему алгоритму. При выключенном или низком уровне сигнала источника 1 сообщений экспериментально подбирают посредством узлов 31, 29 регулировки уровней и фаз (времени задержки, если эта задержка больше длинны волны сигнала) многополосно отфильтрованных принятых шумовых сигналов для достижения максимального шумопонижающего эффекта в области пространства понижения шума. Узел 31 может быть реализован в виде управляемого усилителя или аттенюатора. Узел 29 может быть выполнен в виде фазовращателя или переключаемых линий задержек, показанных на фиг.7 в виде узлов 331, 332,...33S и переключателя 52. После настройки узлов понижения шума система готова к работе. Подбор и оптимизация энергетических и временных предыскажений сигналов сообщений осуществляется автоматически по общеизвестным алгоритмам, описанным в изобретениях-аналогах (фиг.17).
Возможны и другие варианты реализации систем, например с автоматической оптимизацией энергетических и неавтоматической (ручной) оптимизацией временных (фазовых) параметров сигналов сообщений. Возможен также вариант, когда энергетические и временные предыскажения сигналов сообщений осуществляются путем неавтоматического, предварительного, экспериментального подбора регулировок уровней и фаз компонентов сигналов сообщений. Эту настройку желательно осуществлять, отключив от 1 входа принятые шумовые сигналы, а также отключив всевозможные источники шумов и помех. Если это сделать невозможно, то подбор параметров сигналов сообщений следует осуществлять при включенной системе понижения шумов. Вышеуказанные настройки необходимо осуществлять для конкретных каналов связи, аппаратуры и областей пространства получения сообщений и понижения помех и шумов. Подобранные регулировки обеспечивают оптимальные предыскажения сигналов с учетом всевозможных индивидуальных свойств канала связи, мест расположения приемных микрофонов, излучателей и параметров узлов аппаратуры. Для этих вариантов выполнения систем передачи сообщений (понижения шумов) не допускается какое-либо существенное изменение свойств канала связи и других элементов системы. В противном случае потребуется новая настройка системы. Например, для решения задачи понижения шумов внутри самолета или для повышения качества передачи звуковых сообщений для авиапассажиров можно использовать неавтоматические варианты реализации систем, поскольку спектры шумов в точке их приема, например вблизи двигателя и в салоне - вблизи головы пассажира, изменяются друг относительно друга во время полета незначительно из-за возможных дестабилизирующих факторов, определяющих устойчивость передаточной функции канала связи или передачи сигналов для активного понижения шумов. В автомобиле эта передаточная функция канала связи существенно более нестабильна, например, из-за возможного открывания окон, а также появления сильных внешних источников шумов и помех - рядом проезжающих автомобилей различной конструкции и с разным спектром шумового сигнала. Для систем с нестабильными условиями взаимного положения всевозможных элементов и непредсказуемыми изменениями передаточной функции канала связи, а также с непредсказуемыми изменениями спектров сигналов в области пространства получения сообщений (понижения шума) по отношению к спектрам передаваемого сообщения (на выходе источника 1 сигнала сообщения) и принятого шумового сигнала вблизи источника или источников шумов, необходимо использовать вариант реализации блока 2 обработки, показанный, например на фиг.18.
В этом варианте подбор и оптимизация энергетических и временных параметров компонентов сигналов источника сообщений и сигналов для активного понижения шумов полностью автоматизированы. Для обеспечения вышеуказанного условия автоматизации подбора предыскажений сигналов для активного понижения шумов во время низкого уровня компонентов сигналов сообщений в соответствующей полосе частот введены новые функциональные связи между блоками 26 и 28, 31, 30, которые также содержат дополнительные узлы, позволяющие реализовать выполнение этого условия (на фиг.18 эти узлы не показаны. Эти узлы будут подробно описаны ниже).
Для более детального пояснения вышесказанного воспользуемся фиг.19, на которой показана принципиальная схема одного из возможных вариантов выполнения блока 2. Эта схема позволит провести сопоставительный анализ известных и новых технических решений, а также в удобной, наглядной для специалистов форме пояснить суть технических решений этого изобретения и их преимущества перед аналогами.
В схеме, показанной на фиг.19, большинство узлов выполнено на базе ОУ. Фильтры 14 по входам блока 2 обработки сигналов выполнены в виде однотипных ПФ, реализованных в виде трех резонансных ПФ с различной частотой настройки и различным схематично-конструктивным местоположением в полосовых каналах обработки компонентов сигналов. На фиг.19 показаны основные узлы блока 2 обработки сигналов только для одной из множества полос обработки, а также один из возможных вариантов выполнения сумматоров 17, посредством которых осуществляется формирование выходных сигналов блока 2 обработки в результате суммирования многополосно обработанных сигналов источника 1 сообщений и принятых шумовых сигналов. Во всех полосах обработки используются аналогичные схемотехнические узлы и элементы.
Особенностью реализации фильтров 14, с помощью которых осуществляется формирование частотных полос обработки сигналов, является распределение резонансных ПФ по цепи прохождения компонентов сигналов в полосе их обработки. Два из ПФ конструктивно расположены на входе каждого из многополосных каналов обработки сигналов, а один расположен на выходе этого канала. Входные резонансные фильтры могут быть настроены, например, на нижнюю и верхнюю частоты данной полосы обработки сигналов, тогда выходной фильтр должен быть настроен на среднюю частоту этой полосы. Он служит для отфильтровывания продуктов нелинейных и интермодуляционных искажений, возникающих в данном многополосном канале обработки сигналов. Результирующая сквозная АЧХ полосового канала обработки сигналов формируется этими тремя резонансными фильтрами и может иметь, например, максимально плоский вид. Возможны и другие варианты, например, с большим, чем три, числом расстроенных резонансных фильтров или, наоборот, - с меньшим числом, например, при использовании одного входного и одного выходного резонансных фильтров.
При обработке принятых шумовых сигналов, поступающих на 1 вход блока 2 обработки (фиг.19), их многополосная фильтрация осуществляется с помощью микросхемы D 6.
Резонансные фильтры выполнены на ОУ D 6.2 и D 6.4. На ОУ D 6.1 к D 6.5 выполнены повторители сигналов, необходимые для развязки резонансных фильтров и реализации возможности более точного формирования требуемой АЧХ фильтра 14. Аналогичные схемотехнические решения использованы для фильтрации сигналов по другим входам блока 2 обработки: при многополосной фильтрации сигналов источника, подаваемого на 2 вход блока 2 обработки (микросхемы D 1.1 - D 1.4); при многополосной фильтрации сигналов обратной связи (D 4.1 - D 4.4), которые подают на дополнительный вход блока 2 обработки сигналов.
На ОУ D 7.3 - D 7.4 и переключателе SA4 выполнен неавтоматический регулятор фазы (времени задержки) компонентов принятых шумовых сигналов. Функционально эти элементы эквиваленты узлам 32 и 29, например, показанным на фиг.17. Посредством переключателя SA4 можно осуществлять временные предыскажения принятых шумовых сигналов при формировании сигналов для активного понижения шума. Сигнал с выхода переключателя SA4 поступает на вход второго управляемого усилителя 31. В предложенном варианте (фиг.19) этот узел выполняет ряд новых функций. Он реализован на полевом транзисторе VT4, являющемся управляемым ключом, обеспечивающем переход управляемого аттенюатора, выполненного на транзисторе VT5, из режима автоматического регулирования уровней компонентов сигналов для активного понижения шума в режим неавтоматического формирования уровня в зависимости от текущего уровня компонентов сигналов сообщений. Управляющий транзистором VT4 сигнал формируется на выходе инвертора D 5.3 компаратора, выполненного на микросхеме D 5.2. В компараторе сравниваются текущий уровень сигнала сообщения с опорным уровнем сигнала, определяющим порог переключений компаратора. Опорный сигнал выставляется с помощью подстроечного резистора R 38 и подается на инвертирующий вход ОУ D 5.2. На неинвертирующий вход этой микросхемы поступает выпрямленный посредством диодов VD 11, VD 12 и сглаженный посредством интегратора, выполненного на элементах R 37, C17, сигнал сообщения, уровень которого сравнивается с уровнем опорного сигнала компаратора. Когда в данной полосе анализа уровень сигнала сообщения выше наперед заданного порогового уровня, то транзистор VT4 закрыт, и напряжение на затворе транзистора VT5 не изменяется и определяется остаточным напряжением ранее заряженного конденсатора С 44. Он выполняет роль узла памяти. Постоянная времени разрядки конденсатора С 44 выбирается исходя из имеющихся априорных данных о параметрах передаваемых сигналов сообщений и конкретной задачи. Например, в системах передачи звуковых музыкальных сигналов сообщений постоянная времени может быть выбрана порядка 20÷60 сек. Когда уровень компонентов сигналов сообщений в данной полосе анализа становится ниже порогового, то компаратор переключается, и на выходе микросхемы D 5.3 формируется сигнал, открывающий ключевой транзистор VT4. Скорость, с которой происходит открывание транзистора VT4, определяется постоянной времени R 78, С 42. В результате этого сопротивление канала сток-исток этого транзистора уменьшается примерно с 10 мОм до 100÷300 Ом за некоторый отрезок времени, исключающий возможность появления переходных процессов. Конденсатор С4 достаточно быстро заряжается до напряжения, сформированного на выходе ОУ D 9.4. Это напряжение соответствует текущему уровню шумов в области пространства получения сообщения и в данной полосе частот, поскольку уровень сигналов сообщений в данной полосе частот и в данный момент времени ниже наперед заданного порога, например в паузе между песнями или словами диктора. Этим управляющим напряжением осуществляется формирование оптимального уровня компонентов сигналов для активного понижения шума. Коэффициент передачи управляемого аттенюатора зависит от напряжения на затворе транзистора VT5. Рабочая точка управляемого аттенюатора устанавливается подстроечным резистором R 82. Динамический диапазон регулирования уровня входного сигнала определяется соотношением резисторов R 79, R 81, а также сопротивлением сток-исток полевого транзистора VT5. При использовании в составе управляемого аттенюатора, например, транзистора КП 103 динамический диапазон регулировки уровня (при уровне нелинейных искажений не более 3%), составляет порядка 40÷50 дБ. Максимальный динамический диапазон достигается при нулевом сопротивлении резистора R 81. По мере увеличения значения резистора R 81 уменьшается динамический диапазон регулирования уровня входного сигнала аттенюатора. При асимптотическом стремлении значения резистора R 81 к бесконечности динамический диапазон регулирования уровня сигнала стремится к нулю. При этом автоматический вариант реализации второго управляемого усилителя 31 вырождается в неавтоматический. Управляемый аттенюатор, выполненный по схеме, показанной на фиг.19, имеет существенный недостаток. При уровнях входных сигналов свыше примерно 0,3÷0,5 В начинается резкий рост нелинейных искажений этого узла обработки сигналов. При этом результирующий уровень нелинейных и интермодуляционных искажений, возникающий в каждом полосовом канале обработки сигналов, в основном, определяется нелинейными искажениями управляемого аттенюатора. Для уменьшения нелинейных искажений сигнал с выхода управляемого аттенюатора (со стока транзистора VT5) подается на выходной фильтр полосового канала обработки сигналов. Этот фильтр выполнен на ОУ D 8.4, D 9.1, D 9.2. Подобное техническое решение позволяет эффективно фильтровать продукты нелинейных и интермодуляционных искажений и попутно осуществлять дополнительное усиление сигнала, ослабленного в аттенюаторе. Эта функция второго управляемого усилителя 31 является новой дополнительной его функцией, а также является новым самостоятельным техническим решением в устройствах с многополосной обработкой сигналов. Распределение фильтров 14 на входе и выходе полосовых каналов обработки сигналов позволяет решать задачу изобретения по повышению точности передаваемого сообщения, и это техническое решение можно описать в независимом пункте формулы изобретения. Новизна этого технического решения, например, по отношению к решениям, применяемым в конструировании радиоприемных устройств, содержащих на входе и выходе каскадов усиления радио или промежуточных частот колебательные контуры, настроенные в резонанс или расстроенные друг относительно друга, заключается в различии не только типов фильтруемых сигналов, но и в количестве полос фильтрации по отношению к спектру сигнала. Радиосигнал представляет собой несущую, промодулированную сигналом сообщения (например, звуковым или видеосигналом), и этот сигнал фильтруется во всей полосе частот, соответствующей спектру радиосигнала, а в описанном выше техническом решении фильтрации подвергают компоненты шумового сигнала в нескольких различных полосах частот его спектра или части спектра, например в области низких частот.
Понятно, что аналогичное техническое решение по снижению уровня нелинейных и интермодуляционных искажений компонентов многополосно обрабатываемых сигналов можно применять и при многополосной обработке сигналов источника 1 сообщений по входу 2 блока 2 обработки сигналов (фиг.19). Эти сигналы сначала фильтруют (D 1.1 - D 1.4), затем отфильтрованные сигналы корректируют по фазе посредством неавтоматического фазовращателя, выполненного на ОУ D 2.1. Далее осуществляют автоматическую коррекцию энергетических параметров сигналов передаваемого сообщения посредством управляемого ключа (VT1) и управляемого аттенюатора (VT2). Выходную фильтрацию сигнала осуществляют посредством ПФ, выполненного на ОУ D 2.3. Настройку фаз компонентов сигналов сообщений и принятых шумовых сигналов осуществляют с помощью подстроечных резисторов R 9 и посредством переключателя SA4, а уровни этих сигналов экспериментально подбирают посредством резисторов R 19, R 87 на стадии предварительной настройки системы. Многополосно обработанные сигналы сообщений и шумов поступают через выключатели SA5, SA3 на сумматоры 17 (ОУ D3.4, D 5.4). Многополосно обработанные сигналы в других полосах обработки также поступают на эти сумматоры (на резисторы R 43, 44, 47, 48). Как уже отмечалось, возможны различные комбинаторные сочетания подаваемых на сумматоры сигналов и число сумматоров 17, например, при реализации многополосных систем. С выходов сумматоров 17 сигналы поступают на усилитель 3 или усилители 3, 9 согласно конкретной структурной схеме системы, например, показанной на фиг.2.
Следует отметить, что управляющие сигналы, поступающие на транзисторы VT2 и VT5, функционально зависят от текущего соотношения энергетических спектров соответственно сигналов сообщений и сигналов в точке (области) получения сообщения и сигналов в области получения сообщения (понижения уровня шума) и в области пространства приема шумовых сигналов вблизи источника шума. Это позволяет реализовать автоматический режим регулирования уровней сигналов сообщений или сигналов для активного понижения шума в зависимости от относительного изменения текущих уровней компонентов сигналов как в сторону увеличения, так и в сторону уменьшения этих уровней друг относительно друга. Для этого в схеме, показанной на фиг.19, осуществляется разнополярное детектирование сравниваемых сигналов, фильтрация продетектированных сигналов, необходимая для сглаживания выпрямленных импульсных однополярных сигналов, и суммирование разнополярных, сглаженных сигналов. В качестве детекторов разнополярных сигналов использованы детекторы VD 1, VD 3, VD 6, VD 7, а также VD 4, VD 5, VD 8, VD 9. Для фильтрации сигналов использованы ФНЧ (26), выполненные на элементах R 36, С 25, С 27, R 58, С 33. Сумматор выполнен на резисторах R 39 и R 59, который через дополнительный ФНЧ (R40, С26) подключен к затвору транзистора VT2. Другая группа ФНЧ (26) выполнена на элементах R 53, С 30, С 29, R 92, C 55, а сумматор выполнен на резисторах R 93, R 52, R 94, подключенный к стоку транзистора VT4 через повторитель D 9.4.
Узлы автоматического регулирования энергетических предыскажений компонентов сигналов (фиг.19) работают следующим образом.
Предположим, что уже осуществлена предварительная настройка данного полосового канала формирования сигналов для активного понижения шума. В результате предварительного экспериментального подбора фаз принятых шумовых сигналов найдено состояние переключателя SA4, обеспечивающее для данной области пространства и мест расположения микрофона для приема шумовых сигналов и излучателей режим формирования противофазных шумопонижающих волн, уровень которых, например, несколько ниже уровня шумовых волн. Этот уровень шумопонижающих волн сформирован регулятором R87. Для определенности будем полагать, что в результате подобной предварительной настройки удается понизить уровень шума в данной полосе частот обработки сигналов, например, на 20 дБ. В результате этого в области пространства понижения шума остается некоторый остаточный уровень шума, который принимается приемным элементом (микрофоном) зондирующего устройства 5, преобразуется в дополнительно принятый шумовой сигнал (сигнал обратной связи) и поступает на дополнительный вход блока 2 обработки сигналов (фиг.19). Этот сигнал фильтруется фильтрами 14 (ОУ D 4.1-4), усиливается усилителем, выполненным на ОУ D 7.1, и через согласующий резистор R 57 и разделительные конденсаторы C51, C32 подается на детекторы VD 4, VD 5, VD 6, VD 7. Уровень выпрямленного на этих диодах сигнала пропорционален суммарному уровню всех звуковых колебаний в данное время, в данной области пространства и в данной полосе частот. Предположим, что в какой-то момент времени в полосе частот анализа отсутствуют компоненты сигналов сообщений, и уровень постоянного напряжения на выходах диодов функционально зависит только от текущего уровня шумов. Если условия функционирования данной системы позволяют ее смоделировать как стационарную или квазистационарную, то для любого момента времени уровни продетектированных сигналов, принятых в области пространства понижения шума и продетектированных принятых шумовых сигналов (на выходе VD 8, VD 9), будут всегда находиться в одном и том же соотношении по мере возможного изменения спектра принятых шумовых сигналов - пропорционально возрастая или пропорционально уменьшаясь. В этой ситуации разнополярно продетектированные сигналы в сумме будут давать, например, ноль. На выходе сумматора и соответственно микросхемы D 9.4 будет одно и то же напряжение. Это напряжение можно установить равным, например, нулю путем соответствующего выбора коэффициентов усиления усилителей D 7.1 и D 9.3. Поэтому для подобных стационарных систем нет необходимости в автоматизации процесса подбора энергетических и временных (фазовых) параметров шумопонижающих сигналов. В подобных системах отпадает необходимость в использовании транзисторов VT 4, VT 5. Их можно исключить из схемы фиг.19, которая, по сути, превращается в схему, показанную на фиг.16.
Если в системе существуют дестабилизирующие факторы, как-то изменяющие спектр шума в области пространства его понижения по отношению к спектру принятого шумового сигнала, то эта система является нестационарной и работает следующим образом. Предположим, что в результате изменения свойств канала в данной полосе анализа произошел рост уровня шумовых компонентов, например, из-за изменения акустических свойств области пространства понижения шума в результате появления дополнительного переотражателя звуковых волн, приходящих синфазно с прямой волной. Рост уровня шумовых компонентов приведет к тому, что на выходе детекторов VD 5, VD 4 пропорционально уровню дополнительной синфазной волны увеличится уровень постоянного напряжения. На выходе сумматора и повторителя (D 9.4) напряжение с нулевого возрастет до некоторого положительного значения. Это напряжение через открытый канал сток-исток транзистора VT 4 поступит на затвор транзистора VT 5. Сопротивление сток-исток этого транзистора начнет увеличиваться, а уровень сигнала на его стоке начинает возрастать. Шумопонижающий сигнал на выходе блока 2 обработки (на выходе сумматора 17 - ОУ D 5.4) и в области пространства понижения шума также начинает расти и компенсировать прирост уровня шумового сигнала, являющегося суперпозицией шумовых и шумопонижающих сигналов (волн). В результате этого компенсационного автоматического действия уровень продетектированного сигнала начинает понижаться и принимает некоторое значение, обеспечивающее баланс шумовых и шумопонижающих сигналов в области пространства понижения шума на уровне остаточного шума в 20 дБ. Очевидно, что если в результате дестабилизирующих факторов произошло снижение уровня шума ниже заданного уровня в 20 дБ, то на выходе ОУ D 9.4 сформируется отрицательный сигнал, который откроет транзистор VT 5. Уровень шумопонижающего сигнала уменьшится, пока в области пространства понижения шума для данной полосы частот вновь уровень шума не достигнет уровня в 20 дБ и т.д. Если фаза дополнительной помехи и соответственно фаза результирующего сигнала как-то, случайным образом, изменится, то потребуется, помимо подбора энерегетических предыскажений, подбор временных (фазовых) предыскажений шумопонижающих сигналов, например, в соответствии с алгоритмом, показанным в виде схемы автоматического фазовращателя (фиг.7). На фиг.19 узлы, позволяющие автоматизировать эти действия, не показаны, поскольку в аналоговом виде реализация схемы, показанной на фиг.7, получается очень громоздкой, в первую очередь, из-за необходимости реализации большого числа линий задержек, выполняемых, например, в виде последовательно включенных фазовращателей (подобно фазовращателям D 7.5-4 фиг.19), число которых может составлять сотни и даже тысячи для ряда частных задач. Для этих целей практичней использовать цифровые способы формирования задержек и узлов (29, 30, 31).
Основным недостатком вышеописанного варианта автоматизации регулировок уровней компонентов сигналов для активного понижения шумов является необходимость формирования шумопонижающих сигналов с меньшим (или дуально - с большим) уровнем, чем текущий уровень шумовых компонентов в каждой из полос обработки сигналов. Этот остаточный уровень зависит от диапазона возможных изменений уровня шума. Данный вариант целесообразно использовать в квазистационарных системах с незначительными относительными изменениями компонентов шумовых сигналов в точке их приема вблизи источника шума и в области пространства его понижения. В противном случае при больших, резких изменениях спектров сигналов система может и не успеть отследить, в какую сторона надо осуществлять энергетические предыскажения сигналов для активного понижения шума.
Возможны и другие варианты построения узлов и систем для реализации функции по автоматизации энергетических предыскажений принятых шумовых сигналов. На фиг.20 показан дополнительный узел, который может быть включен в разрыв участка цепи (фиг.19) между диодом VD 4 и повторителем D 9.4. Этот узел позволяет исключить из схемы (фиг.19) элементы: R 91, 88, 89, 90, 92, 93, D 9.3, C 54, 55, а также обеспечить более низкий остаточный уровень шума, который практически не зависит от возможного диапазона изменений уровней, спектров шумовых сигналов в точке их приема и понижения. В этом варианте, принцип работы узлов автоматизирующих подбор энергетических параметров принятых шумовых сигналов существенно отличается от вышеописанного. Поскольку уровень сигнала на входе схемы, показанной на фиг.20, может изменяться только от нуля до некоторого положительного уровня, пропорционального общему суммарному уровню всех звуковых сигналов для данной полосы частот, то основное новое функциональное предназначение этой схемы состоит в определении знака или направления, в котором следует осуществлять предыскажающую регулировку - увеличивать или уменьшать уровень сигналов для активного понижения шума.
В состав этой схемы входят следующие основные узлы. Компаратор, выполненный на ОУ D 10.1. Он позволяет переключать полярность выходного, управляющего напряжения этой схемы с минуса на плюс, когда уровень входного сигнала превышает некоторый пороговый уровень. Этот пороговый уровень задается с помощью резистора R 104 и устанавливается, например, на уровне - 20÷40 дБ от среднего уровня шумовых сигналов в момент настройки системы. В состав схемы (фиг.20) также входят управляемые ключи, выполненные на полевых транзисторах различной полярности их переходов VT 6, VT 7, выходы которых объединены посредством сумматора (R 101, 102, 103), выполняющего также роль интегратора за счет параллельного подключения к резистору R 105 конденсатора C 59. Сигнал с сумматора подается на вход повторителя D 9.4 и далее к транзистору VT 4 (фиг.19). Схема, показанная на фиг.20, также содержит ключ, выполненный на транзисторе VT 8, который позволяет обнулять вход компаратора, когда уровень сигналов сообщений выше наперед заданного порога. На стоки транзисторов VT 6, VT 7, которые являются входами вышеуказанных ключей, сигналы подаются с выходов ОУ D 10.2 и D 10.5, которые имеют одинаковый уровень, но различную полярность. Знак полярности как раз и определяет направление осуществления предыскажений энергетических параметров сигналов для активного понижения шума - увеличение или уменьшение уровня формируемого сигнала в данной полосе обработки в зависимости от конкретной, случайной ситуации изменений спектра сигнала. Работают схемы, показанные на фиг.19, 20, следующим образом.
Предположим, что в данный момент времени на частотах анализа отсутствуют как компоненты сигналов сообщений, так и компоненты помех в области пространства получения сообщения - вблизи места расположения приемного элемента зондирующего устройства 5. В этот момент времени на выходе диода VD4 сформирован нулевой уровень сигнала. Соответственно и на входе компаратора (D 10.1) также нулевой уровень. Если этот уровень ниже некоторого положительного напряжения, сформированного на инвертирующем входе ОУ D 10.1, тогда на выходе компаратора будет сформирован отрицательный уровень сигнала. Этим уровнем определяется состояние транзисторов ключей. Транзистор VT6 открыт, а транзистор VT7 закрыт. Нулевой входной уровень сигнала (с выхода VD4), через интегрирующие цепочки (R 55, 52, С 50, 29), повторитель (D 10.2), ключ (VT6), сумматор-интегратор (R 101, 105, С 59), повторитель (D 9.4), через открытый ключ - транзистор VT4, поступает на управляющий вход второго управляемого усилителя 31 - затвор транзистора VT5. Этому нулевому управляющему уровню соответствует определенное сопротивление сток-исток транзистора VT5 и соответствующий коэффициент передачи управляемого аттенюатора (например, коэффициент передачи аттенюатора установлен на уровне - 20 дБ относительно входного сигнала с помощью резистора R 82, 81, 79).
Если нулевой уровень помех в области пространства их понижения обусловлен отсутствием собственно самих источников этих помех, например, из-за того, что выключен двигатель или помехи имеют циклический характер, то появляясь, то затем пропадая, то и на первом входе блока 2 обработки сигналов (фиг.19) уровень принятого шумового электрического сигнала такие будет равен нулю.
Если нулевой, а точней говоря, очень низкий шумовой уровень в области пространства получения сообщений является следствием вышеописанного процесса активного понижения шума, то эта ситуация соответствует оптимально подобранным регулировкам фаз и уровней компонентов сигналов для активного понижения шума. Это состояние в системе будет сохраняться сколь угодно долго, пока она является стационарной.
Если в системе произойдут изменения, например появятся дополнительные шумовые сигналы, компоненты которых попадают в данную полосу анализа и обработки сигналов, или изменится коэффициент передачи канала шумовых сигналов для данных частот их анализа, то произойдет разбалансировка шумовых и шумопонижающих сигналов по уровням и, в общем случае, фазам. Для простоты будем полагать, что, например, появилась синфазная по отношению к собственно шумовым волнам помеха той же частоты. В результате суперпозиции этих помех разбалансировка шумовых и шумопонижающих сигналов определяется лишь несоответствием уровней этих сигналов. Уровень результирующей помехи стал больше уровня шумопонижающего сигнала. В результате этого изменения на выходе диода VD4 появится положительный сигнал, уровень которого будет возрастать пропорционально уровню дополнительной синфазной помехи. Этот зарастающий сигнал, скорость нарастания которого определяется постоянной времени интеграторов (R 55, 52, C 50, 29), будет поступать через вышеуказанные элементы (D 10.2, VT 6, D 9.4, VT 4) на затвор транзистора VT5 управляемого аттенюатора второго управляемого усилителя 31. Это положительное напряжение изменяет состояние транзистора VT5 - он закрывается. Коэффициент передачи управляемого аттенюатора увеличивается с - 20 дБ, например, до - 15 дБ. В области пространства понижения шума уровень шумопонижающих волн также увеличивается до состояния баланса шумовых (с повышенным на 5 дБ уровнем шума за счет дополнительной синфазной помехи) и шумопонижающих волн.
Важным моментом работы схемы, показанной на фиг.20, является то, что на неинвертирующем входе компаратора (D 10.1) положительные сигналы формируются с дополнительной задержкой, определяемой постоянной времени интегратора R 108, С 60. Это действие по своему функциональному назначению во многом аналогично формированию задержки сигнала (посредством линии задержки 54) в схеме, показанной на фиг.7. Поэтому при синфазной дополнительной помехе система успевает самонастроиться и подавить прирост уровня шума, прежде чем положительный уровень сигнала на входе компаратора превысит заданный порог. Если постоянную времени интегратора R 108, С 60 выбрать больше постоянной времени саморегуляции системы (с учетом времени задержки сигналов в канале связи), то компаратор не будет успевать переключаться. Следует заметить, что сопротивление сток-исток транзистора VT8 в смоделированной ситуации велико, поскольку он закрыт управляющим напряжением с выхода ОУ D 5.3 подобно транзистору VT1, который выполняет функцию полосового порогового шумоподавителя электрических сигналов источника сообщений. Это также новое техническое решение. Если текущий уровень сигналов сообщений превысит порог, установленный подстроечным резистором R 58, то сигналы на выходе компаратора (D 5.2) и инвертора (D 5.3) изменятся на противоположные, и транзистор VT8 откроется и малым сопротивлением сток-исток будет шунтировать вход компаратора D 10.1, пока уровень сигналов сообщений в данной полосе анализа и обработки снова не станет ниже наперед заданного уровня.
Смоделируем другую ситуацию. Пусть уровень помехи понизился в результате появления дополнительной помехи той же частоты, но противоположной фазы по отношению к основной помехе. Тогда уровень положительного сигнала на выходе диода VD4 на входе схемы (фиг.20) также начнет возрастать за счет более высокого уровня сигналов для активного понижения дума по отношению к уровню суммарной помехи. Предположим, что в данное время уровень сигналов сообщений на частотах анализа ниже наперед заданного, и транзистор VT8 закрыт управляющим сигналом с выхода ОУ D 5.3. В этой ситуации нарастающий положительный уровень на затворе транзистора VT5 управляемого аттенюатора будет его закрывать, увеличивая коэффициент передачи аттенюатора, и в области пространства понижения шума уровень шумопонижающих сигналов начнет расти, что, в свою очередь, приведет к дальнейшему росту уровня остаточного шума. Этот процесс будет нарастать до тех пор, пока уровень постоянного напряжения на неинвертирующем входе компаратора не превысит порогового значения. Когда это произойдет, то компаратор переключится, и его выходное напряжение с минуса изменится на плюс (питание ОУ двухполярное). Соответственно изменится и состояние ключевых транзисторов. Транзистор VT6 "мягко" закроется, а транзистор VT7 "мягко" откроется (за счет работы интеграторов R 99, С 57, R 100, С 58), и на сумматоре-интеграторе R 102, 103, С 59 также "мягко" начнет формироваться напряжение обратной полярности. Таким образом, осуществляется распознавание направления, в какую сторону надо осуществлять коррекцию коэффициента передачи второго управляемого усилителя 31 (в данном схемотехническом решении - аттенюатора). Отрицательным управляющим напряжением транзистор VT5 начинает открываться, и коэффициент передачи аттенюатора уменьшается до наступления определенного баланса шумопонижающих и шумовых сигналов. Это будет происходить до тех пор, пока напряжение на неинвертирующем входе компаратора вновь не станет ниже порогового. Когда это произойдет, то компаратор снова переключится, и этот процесс вновь повторится. Он будет иметь характер колебаний, в общем случае с разной частотой для каждой из полос анализа сигналов. При этом уровень шумопонижающих сигналов будет изменяться между некоторыми граничными уровнями шумов. В результате данной модели ситуации также будет существовать некоторый усредненный остаточный уровень шумов, что нежелательно. Чтобы избавиться от этого эффекта, можно перед или после резистора R 108 интегратора установить развязывающий диод, который позволит сохранять высокий потенциал на неинвертирующем входе компаратора до тех пор, пока не произойдет его обнуление посредством ключа VT8, или не произойдет саморазрядка конденсатора С60 за счет утечки напряжения через входное сопротивление компаратора, сопротивление сток-исток транзистора VT8, обратное сопротивление развязывающего диода, или через сопротивление конденсатора С 60. Постоянную времени разрядки конденсатора С 60 можно сформировать путем параллельного подключения резистора в этому конденсатору. Этот резистор и развязывающий диод на фиг.20 не показаны.
Все вышеуказанные постоянные времени выбирают исходя из конкретных условий задачи (исходя из дальности каналов передачи сообщений, шумовых и шумопонижающих сигналов, скорости распространения сигналов в каналах, частоты обрабатываемых сигналов).
Если в данной полосе частот анализа и обработки сигналов появляются компоненты сигналов источника 1 сообщений, уровень которых выше наперед заданного, то в течение времени, когда их уровень превышает этот порог, формирование сигналов для активного понижения шума осуществляется по памяти за счет ранее заряженного конденсатора С 44. В это время транзистор VT4 закрыт, и какие бы сигналы ни формировались в это время в схеме, показанной на фиг.20, они не поступают на затвор транзистора VT5 управляемого аттенюатора. В течение этого времени транзистор VT8 открыт, и на неинвертирующем входе компаратора D 10.1 присутствует сигнал, уровень которого близок к нулю.
Когда уровень компонентов сигналов сообщений становится ниже наперед заданного уровня, транзистор VT8 закрывается, и процесс автоматической коррекции уровня шумопонижающих сигналов повторяется по вышеописанному алгоритму. Система автоматически понижает уровень шума до заданного - близкого к нулю уровня. Причем остаточный уровень шумов будет определяться не только алгоритмом автоматического формирования шумопонижающих сигналов, но и искажениями, возникающими преимущественно в излучателях (4, 10). Вышеописанный процесс происходит и в том случае, когда изменяется не только уровень результирующего шумового сигнала, но и фазы его компонентов. Отслеживание и оптимизация фазовых (временных) параметров сигналов для активного понижения шума может осуществляться в соответствии с общеизвестным алгоритмом (фиг.7). Выбрав соответствующим образом постоянные времени самоадаптации системы при оптимизации (подборе и "захвате") фазы и уровня в данной полосе обработки сигналов, можно эти процессы осуществлять одновременно во времени. Возможен также вариант последовательного осуществления этих действий в виде итерационного процесса последовательных приближений к оптимальным предыскажениям принятых шумовых сигналов, обеспечивающих наибольший шумопонижающий эффект. Для исключения условий, при которых возможно самовозбуждение системы, следует соответствующим образом выбирать постоянные времени регулирования параметров сигналов как внутри каждой из полос обработки, так и в определенном их соотношении между полосами обработки. За счет частичного взаимного перекрытия этих полос (из-за неидеально прямоугольной АЧХ этих полос обработки) результирующий сигнал определяется не только уровнем и фазой компоненты, прошедшей через соответствующий фильтр, но и частотными компонентами, проходящими также и через другие полосовые фильтры (естественно, если они открыты в это время). Вклад этих дополнительных сигналов из-за "хвостов" АЧХ фильтров 14 может быть и незначительным, но в ряде прикладных задач их необходимо учитывать при формировании выходных сигналов блока 2 обработки сигналов. Поэтому все возможные регулировки желательно осуществлять достаточно плавно по отношению к скорости нарастания сигналов в полосах обработки подобно действиям звукооператоров, вручную осуществляющих схожие действия, например, при микшировании сигналов или при работе с эквалайзером. В противном случае резкие переключения полосовых сигналов будут приводить к переходным процессам, которые будут заметны на слух и будут восприниматься, например, как щелчки или хлопки при передаче звуковых сообщений. Для этого постоянные времени автоматического регулирования должны быть не менее хотя бы 5-10 периодов сигналов соответствующих частот для ключей VT1, VT4, VT6, VT7, VT8. Для управляемых аттенюаторов VT2, VT5 эти постоянные времени должны быть еще больше (в несколько раз или даже на несколько порядков) для исключения паразитной модуляции сигналов сообщений и сигналов для активного понижения шума пульсирующим, плохо отфильтрованным, управляющим напряжением, поступающим на затворы этих транзисторов. Кстати говоря, выходные фильтры полосовых каналов обработки сигналов помимо понижения нелинейных и интермодуляционных искажений сигналов будут отчасти снижать этот отрицательный модуляционный эффект. Еще более высокими должны быть постоянные времени интегрирующих цепочек R 108, С 60 в силу вышеуказанных особенностей работы схемы, показанной на фиг.20. Следует отметить, что в системах шумопонижения ряд элементов можно исключить по сравнению с системами передачи сообщений в условиях шумов. Например, можно исключить транзистор VT8 и его связь с ОУ D 5.3. При этом можно также обойтись без диодов VD5, VD4, снимая эквивалентный сигнал управления с диодов VD6, VD7, а в вариантах реализации автоматических систем передачи сообщений и с диодов VD1, VD2 в соответствии со структурными схемами, показанными на фиг.14, 15, 18. Учитывая обратный знак полярности сигналов, выпрямленных диодами VD4, VD5, необходимо по входу схемы (фиг.20) поставить инвертор, изменяющий знак входного сигнала, или иным образом доработать эту схему, например, изменив на обратное напряжение, определяющее порог срабатывания компаратора D 10.1. Возможны и другие варианты автоматизации процессов подбора оптимальных предыскажений сигналов в блоке 2 их обработки.
Как уже отмечалось, основное преимущество вышеописанных систем понижения шума и передачи сообщений по отношению к аналогам, в которых шумовой сигнал принимают в области пространства его понижения, заключается в удалении точки приема шумового сигнала от точки (области) пространства понижения шума и получении за счет этого действия более высокой развязки шумовых и шумопонижающих сигналов и существенно более эффективного понижения уровня шума в требуемой области пространства. Например, вблизи слуховых органов человека. На фиг.19 показаны узлы одного из возможных вариантов схемы понижения шума аналога. В этом варианте шумопонижающие сигналы формируются в моменты времени, когда отсутствуют компоненты сигналов источника 1 сообщений, в соответствующей полосе анализа посредством ключа, выполненного на транзисторе VT5. Для простоты на фиг.19 показан неавтоматический вариант формирования энергетических (посредством резистора R 64) и временных (посредством резистора R 95) предыскажений шумовых сигналов, принятых в области пространства понижения шума. Понятно, что автоматические регулировки уровней и фаз этих сигналов можно получить, используя вышеописанные примеры выполнения узлов, позволяющих автоматизировать эти действия, например, включив между транзистором VT3 и ОУ D 8.1 управляемый аттенюатор, выполненный подобно аттенюаторам полосового канала обработки сигналов сообщений (VT 2) или принятых шумовых сигналов (VT 5), а автоматический фазовращатель - по схеме, показанной на фиг.7. Для данного технического решения шумопонижающий эффект очень мал и составляет порядка нескольких дБ. В вышеописанном варианте он может составлять десятки дБ. В этом заключается основное преимущество предложенных технических решений над аналогами. Поэтому признак "место приема шумовых сигналов выбирают ближе к источнику шума, чем область пространства получения сообщения" является существенным признаком, необходимым и достаточным для решения задачи изобретения по повышению точности передаваемого сообщения из одной точки пространства и времени в другую точку при наличии помех и шумов с заранее известным местоположением источника или источников шумов. Этот признак, также как и вышеописанное условие на осуществление энергетических и временных предыскажений принятых шумовых сигналов при нулевом уровне электрических сигналов источника 1 сообщений или при уровне электрических сигналов источника 1 сообщений ниже наперед заданного порога, запоминания энергетических и временных предыскажений, обеспечивающих эффект понижения уровня шума в области пространства получения сообщения, следует включить в ограничительную часть первого пункта формулы изобретения.
Процесс обработки сигналов источника 1 сообщений во многом аналогичен обработке шумовых сигналов. Он является как бы приоритетно инверсным по отношению к действиям процесса понижения шумов. Поясним эти процессы с использованием фиг.19.
Сигналы источника 1 сообщений и сигналы, принятые зондирующим устройством 5 в области пространства получения сообщений, фильтруются фильтрами 14 с одинаковыми АЧХ, выполненными на ОУ D 1.2, D 1.4 и D 4.2, D 4.4, усиливаются усилителями, выполненными на ОУ D 5.1 и D 7.1, разнополярно детектируются, сглаживаются и суммируются посредством вышеуказанных элементов схемы.
Для любого момента времени сигнал управления, сформированный в точке D (фиг.19), несет информацию о текущем соотношении уровней компонентов для каждой из полос анализа передаваемого и принимаемого сигнала источника 1 сообщений. Например, если нулевому уровню управляющего сигнала (в точке D) соответствует ситуация отсутствия в данной полосе анализа шумовых компонентов и присутствия компонентов сигнала источника 1, уровень которого в области пространства получения сообщения точно соответствует требуемому уровню, предварительно выставленному посредством подстроечного резистора R 25 на вышеуказанном этапе предварительной настройки этого полосового канала передачи сообщений в конкретном канале передачи сообщений, то при любых изменениях в системе соответствующим образом будет меняться и сигнал управления (в точке D). Предварительную настройку коэффициента передачи данного полосового канала передачи сигналов можно производить по удобным для этого типам сигналов, например шумоподобным или синусоидальноподобной формы.
Предположим, что появились синфазные компонентам сигнала помехи, которые являются следствием, например, многолучевости канала связи. За счет этого уровень сигнала на выходе детекторов VD6, VD7 по модулю будет больше уровня на выходе детекторов VD1, VD5 и в точке D уровень сигнала с нулевого начнет понижаться до некоторого значения, пропорционального уровню синфазной помехи. Это отрицательное напряжение поступит на затвор транзистора VT2. Он начнет открываться так, что сигнал источника 1 сообщений, прошедший через входной фильтр 14, фазовращатель D 2.1 и ключ VT1, начнет уменьшаться. В области пространства получения сообщения уровень звуковых колебаний сигнала сообщений также начнет уменьшаться до тех пор, пока напряжение в точке D вновь не станет равно нулю, и общая суммарная энергия сигналов сообщений плюс шум в точке получения сообщения будет равняться энергии сигнала сообщения без этой помехи в данной полосе анализа. Это принципиально другой вариант реализации способа регулировки уровня сигнала источника 1 сообщения по сравнению с принципом работы аналога - системы San Francisco фирмы Blaupunkt, в которой всегда осуществляется подъем уровня сигнала сообщения в области пространства его получения при росте среднего уровня помех.
Если помеха противофазна компонентам сигналов сообщений, то на затвор транзистора VT2 поступает напряжение положительной полярности, и транзистор VT2 закрывается, а уровень звуковых сигналов сообщений в области пространства его получения возрастает ровно настолько, каков уровень противофазных компонентов помехи. В результате слушатель в области пространства получения сообщения воспринимает компоненты звуковых сигналов сообщений и компоненты шумов, суммарный уровень которых максимально точно соответствует уровню компонентов сигналов источника сообщений или уровню первоисточников звуков, если запись этих источников и формирование сигналов в источнике 1 осуществлялись в соответствии с методикой, изложенной в патенте RU, A, 2145446. Причем, если на выходе источника 1 сигналов сообщений или на входе блока 2 обработки установить регулятор уровня, то посредством этого регулятора слушатель может выбрать комфортный для себя уровень прослушивания сигналов источника 1, например, на уровне 80 или 110 дБ. Выбранный им уровень громкости будет автоматически отслеживаться и поддерживаться системой с учетом, например, некоторого остаточного уровня помех. Подобная работа блока 2 обработки сигналов эквивалентна реализации автоматического варианта общеизвестного винеровского фильтра. Например, если в данный момент времени на определенных частотах должна звучать низкочастотная музыка, создаваемая бас-гитарой на уровне, например, 80 дБ, и в то же самое время на этой частоте присутствует не подавленный системой шумовой сигнал той же частоты, той же фазы и с тем же уровнем, то в результате указанной выше регулировки состояние транзистора VT2 будет таким, что сигнал источника 1 сообщений будет ослаблен на 80 дБ, то есть до нулевого уровня. В это время слушатель будет слышать компоненты шума на этих частотах вместо компонентов бас-гитары источника 1 сигнала сообщений, а не просто сумму компонентов шума и усиленных пропорционально шуму сигналов сообщений, как в системе San Francisco CD 70 фирмы Blaupunkt. С точки зрения положений современной теории информации, слушателю абсолютно безразлично, что в данный момент времени, на конкретных частотах является излучателем звуков. Динамик громкоговорителя (4, 10), излучающий звуки бас-гитары, или звуки от выхлопной трубы, например, автомобиля, в котором он прослушивает музыку. Ему важно услышать ту же последовательность звуков определенных частот, определенного уровня и определенным образом сфазированных друг относительно друга, что и у первоисточника этих звуков. Поэтому уровень компонентов сигналов сообщений должен регулироваться с учетом уровней и фаз компонентов помех и шумов в точке (области) пространства получения сообщения. Понятно, что если область пространства получения сообщения имеет заранее известные размеры и форму, то с учетом этой априорной информации целесообразно ограничить полосу частот автоматического регулирования энергетических и временных предыскажений сигналов источника 1 сообщений подобно вышеописанным ограничениям на полосу частот сигналов для активного понижения шума. В противном случае оптимально подобранные предыскажения для точки пространства, где расположен приемный элемент зондирующего устройства 5, могут сильно отличаться для точек пространства, где в данный момент времени находятся органы слуха (голова) человека.
Часть узлов и элементов схемы, показанной на фиг.19, являются новым техническим решением для многополосного порогового понижения шума электрических сигналов источника 1 сообщений. В состав этого шумоподавителя входят многополосные каналы порогового понижения шума, выполненные на ОУ D 1.1-4; D 2.1; VT1; D 3.1-4; D 5.1; VD 2, VD 2; D 5.2-3, а также ряд других элементов схемы (фиг.19). Фазовращатель (D 2.1) и выходной фильтр (D 3.1-3) могут быть исключены из схемы шумоподавителя. Это устройство позволяет эффективно подавлять шумы электрических сигналов сообщений в каждой (или части) полос обработки сигналов, когда уровень компонентов входного сигнала шумоподавителя ниже наперед заданного значения (порога). Этот порог выставляется подстроечным резистором R 38 и может быть задан, например на уровне - 20÷70 дБ от максимального уровня входного сигнала. Пороговый уровень может быть одинаковым или различным для различных полос обработки сигнала источника 1 сообщений. Подобными шумоподавителями можно укомплектовывать различные радиотехнические системы и устройства, магнитофоны, проигрыватели, микшерские пульты и т.д. Конструктивно их можно реализовать в виде звуковых карт (программного обеспечения ПК) или приставок для поблочного комплектования аппаратуры. Подобные шумоподавители могут быть очень полезны для обработки и реставрации старых записей, пластинок или использоваться для обработки звуковых сигналов сотрудниками спецслужб, например, при дешифрации телеметрической информации или переговоров пилотов самолетов, потерпевших крушение. Эффективность шумопонижающего эффекта, в основном, определяется числом полосовых каналов понижения шума (числом фильтров 14) и постоянной времени включения и выключения полосовых каналов (C 56, R 37, С 17, R 14, C 7). Шумопонижающий эффект этого шумоподавителя зависит и от текущего спектра сигнала источника 1 сообщений, а также определяется шумовыми характеристиками выходных операционных усилителей (D 3.1-4), соотношением резистора R 21 и сопротивления сток-исток транзистора VT 1 и может составить для каждой полосы подавление шума порядка - 100÷150 дБ. Например, если число полос обработки сигнала в шумоподавителе равняется ста, а спектр сигнала представляет синусоидально-подобный сигнал частотой 10 кГц, то все полосы обработки, кроме той, в которую попал сигнал, будут закрыты, как выше, так и ниже этой частоты, и результирующий остаточный уровень шума уменьшится в сто раз (40 дБ). Для сравнения, общеизвестные динамические шумоподавители, у которых частота среза фильтра устанавливается, как правило, на частотах порядка 3-6 кГц и широкополосные пороговые шумоподавители в данной ситуации не дадут шумопонижающего эффекта, а эффект от различных вариантов шумоподавителей Dolby с обработкой сигнала при записи фонограммы и ее воспроизведении не превысит 15÷25 дБ. Таким образом, предложенный вариант шумоподавления электрических сигналов источника 1 сообщений лишен основных недостатков общеизвестных устройств понижения шумов в виде частичного подавления полезного сигнала и неизбежно высоких нелинейных и интермодуляционных искажений сигналов при их нелинейной обработке при сжатии и расширении динамического диапазона во время двукратной обработки этих сигналов в компандерных шумопонижающих устройствах. Например, данный шумоподавитель практически лишен заметного на слух "пшикающего" эффекта, характерного для порогового шумоподавителя NFD фирмы Panasonic, шумоподавителя DNL, предложенного фирмой Philips, или широко известного отечественного шумоподавителя "Маяк", поскольку процесс включения полосовых каналов происходит не одновременно, на различных частотах, где появляются компоненты сигналов источника 1 сообщений. Энергия шумовых "хвостов", создающих вышеуказанный неприятный эффект, определятся энергией шумов, попавших в полосу частот компоненты сигнала, которая меньше, например, в сто раз, чем вся полоса звуковых сигналов. Поэтому остаточные "хвосты" шумов становятся практически незаметны на слух. Эти шумоподавители можно использовать в HI-FI системах. Поскольку это техническое решение в качестве части входит в патентуемое изобретение и решает задачу изобретения, то оно может быть описано в независимом пункте формулы изобретения. Требование к единству изобретения не нарушается.
Вышеизложенные пояснения принципа работы полосовых каналов обработки сигналов сообщений и принятых шумовых сигналов позволяют понять в деталях и в динамике принцип работы всей системы и соответствующих способов передачи сообщений любой физической природы в каналах с помехами. В способах и системах с неавтоматической регулировкой энергетических и временных предыскажений сигналов процесс активного понижения шума осуществляется все время в соответствии с ранее выставленными (запомненными) регулировками этих предыскажений. Если параметры канала неустойчивы, и требуется постоянная подстройка предыскажений принятых шумовых сигналов, то она осуществляется только в те моменты времени, когда в данной полосе анализа уровень компонентов сигналов сообщений ниже наперед заданного уровня, и эти сигналы не создают помехи процессам автоподстройки шумопонижающей системы. Когда уровень компонентов сигналов сообщений выше наперед заданного, то ранее найденные регулировки предыскажений принятых шумовых сигналов сохраняются, обеспечивая режим шумопонижения по памяти. Запоминание энергетических предыскажений в каждой из полос обработки сигналов может осуществляться посредством конденсатора C44, как показано на фиг.19, а временные предыскажения могут запоминаться (фиксироваться), например, посредством реле, отключающего подачу питания на электромотор электромеханического варианта реализации управляемого переключателя 32 (фиг.7) или его аналога в схеме, показанной на фиг.19 - переключателя SA4. Возможны и другие технические решения реализации управляемых фазовращателей с использованием мультиплексоров, переключающих, подобно переключателю SA4, сигналы с различными задержками на свой выход. При этом перевод состояния мультиплексора в режим работы по памяти можно осуществить посредством фиксации импульсов управления. При этом сигналы сообщений формируются в области пространства их получения по общеизвестным алгоритмам в соответствии со структурной схемой системы.
При реализации подобных систем и способов передачи сообщений важным обстоятельством является необходимость учета задержек ряда вышеописанных процессов регулирования предыскажений относительно сигналов сообщений. В этих системах желательно засинхронизировать моменты времени превышения сигналами сообщений порога (или порогов) с моментами времени переключения ключей (VT1, VT4). Если не предпринять соответствующих мер, то в результате задержек, возникающих при выработке управляющих процессами переключений сигналов, может происходить потеря части информационных сообщений. Действительно, для того, чтобы сформировать управляющие сигналы для переключения, например, транзистора VT1, необходимо определенное время, определяемое постоянной времени элементов R 96, С 56, R 56, C 17, R 14, C7. Их использование обусловлено, c одной стороны, необходимостью устойчивой работы компаратора (D 5.2), особенно в режимах низкого порога анализа уровня сигнала, и исключения частых включений соответствующего полосового канала за счет шумов, с другой стороны, интегратор R 14, C 17 служит для формирования так называемого "мягкого" или плавного процесса переключения полевого транзистора VT1. Если этого не делать, то при резких переключениях этого транзистора могут возникать переходные процессы типа "щелчков", характерные, например, для интегральных аналоговых коммутаторов, выполняемых на микросхемах типа K176KT1.
Вышеуказанное условие по синхронизации процессов можно реализовать, если дополнительно задержать сигнал сообщения в каждом полосовом канале на отрезке между входным фильтром 14 и вышеуказанным ключевым транзистором VT1. Задержка может быть сформирована посредством нескольких последовательно включенных фазовращателей. Время задержки этих фазовращателей должно соответствовать постоянной времени формирования сигналов, управляющих переключением транзисторов VT1 в соответствующих полосах обработки сигналов. Для исключения временных искажений компонентов сигналов сообщений задержку этих компонентов нужно делать одинаковой или разной - с учетом временных предыскажений компонентов сигналов, когда возможны временные искажения в канале связи. Реализация этого условия обеспечит синфазность прихода всех компонентов в область пространства получения сообщения и минимизирует потерю информации. Это условие дозволяет существенно повысить качество обработки сигналов в многополосном пороговом шумоподавителе. При реализации аналоговых вариантов блоков 2 обработки или многополосных пороговых шумоподавителей целесообразно заменить управляемые аттенюаторы, выполненные на транзисторе VT2, специализированными микросхемами - управляемыми усилителями, которые имеют значительно более низкие нелинейные искажения и более высокие другие параметры. Для этих целей можно использовать, например, микросхему SSM2164, состоящую из четырех управляемых напряжением усилителей. Диапазон регулировки усиления этой микросхемы (относительно 0,775 В) от -94 до +20 дБ с крутизной управления уровнем сигнала 33 мВ/дБ. Выходной каскад может работать в режиме класса А (коэффициент нелинейных искажений КГ=0,15%) или АВ (КГ=0,3%). Вместо дискретных диодов можно использовать микросхему К157ДА1 - двухканальный, двухполупериодный амплитудный детектор, совмещенный с усилителем сигналов. В системах HI-End класса желательно использовать в качестве управляемого усилителя микросхему SSM2018T, имеющую еще более высокие технические параметры. Например, коэффициент нелинейных искажений этой микросхемы в режимах А и АВ не превышает 0,04%. В качестве операционных усилителей можно использовать микросхему TL 074 (четыре ОУ в одном корпусе, КГ=0.003%, еШ=15 нВ/Гц) или микросхему NE5554 А, имеющую еще более высокие параметры. При достаточно большом числе фильтров 14, выполненных на высокодобротных ПФ, расстроенных друг относительно друга с дополнительной фильтрацией обрабатываемых компонентов сигналов на выходах многополосных каналов их обработки, уровень нелинейных и интермодуляционных искажений сигналов в этих полосах обработки при использовании этих микросхем не превысит 0.003÷0,005% и в основном будет определяться искажениями фильтра (D 2.5), повторителя (D 2.4) и сумматора (D 3.4). Фильтр D 2.3 будет эффективно фильтровать все возможные продукты нелинейных и интермодуляционных искажений, появляющиеся в предыдущих каскадах обработки сигналов. Эти микросхемы можно использовать в многополосных пороговых шумоподавителях HI-End класса. При реализации блоков 2 обработки в виде многополосных пороговых подавителей шума или шумопонижающих систем с использованием современных цифровых систем обработки сигналов возможна реализация систем супер-HI-End класса, которые с большим основанием можно отнести к классу систем "Формулы-1", если придерживаться классификации, предложенной фирмой Alpina. Число полос обработки сигналов в этих системах может быть практически любым за счет возможности наращивания процессоров или ПК для обработки сигналов. Например, один из процессоров или ПК может отвечать за синхронизацию вышеописанных процессов многополосной обработки сигналов и за хранение данных. Другие процессоры или ПК могут осуществлять вышеописанные действия по обработке сигналов в желаемом числе поддиапазонов частот звуковых сигналов. В подобных системах можно осуществлять практически покомпонентный анализ сигналов, их корректировать, а также отфильтровывать компоненты шумов и их эффективно активно понижать. Системы подобного уровня сложности относятся к машинам высшей формы организации. Они придуманы и синтезированы не в результате бессистемного поиска "удачных" технических решений, а в результате системного подхода к решению соответствующих задач в четком соответствии с положениями теории информации. Например, базовая идея использовать для обработки сигналов множество полос прямо вытекает из общеизвестных формул - рядов и интегралов Фурье, а также из общеизвестных свойств интегралов, что интеграл суммы функций (компонентов сигналов) равен сумме интегралов. Эти базовые положения теории информации можно из формальных математических символов представить в эквивалентной схемотехнической форме - в виде множества каналов обработки сигналов, объединяемых на выходе сумматором или сумматорами 17. Понятно, что, увеличивая число этих полосовых каналов, в пределе можно перейти к покомпонентному анализу сигналов, по форме близких к синусоидам. Поэтому оптимизация энергетических и временных предыскажений этих синусоидальноподобных компонентов сигналов дает исчерпывающий - полнопараметрический анализ и обработку этих сигналов. Больше уже просто нечего оптимизировать и что-либо логически обоснованно делать с этими сигналами. Поэтому вышеописанные базовые принципы работы подобных систем четко соответствуют новому фундаментальному закону природы - закону минимизации роста энтропии (системы связи). Это машины с обратной связью и специальной обработкой передаваемого и принимаемого сообщений (или сигналов шума). Работа этих систем или машин целенаправленна, происходит по вышеописанным алгоритмам и позволяет непосредственно в процессе передачи сигналов сообщений исследовать свойства этих сигналов, свойства помех (их спектры) и свойства канала системы связи, вырабатывать текущие управляющие сигналы и добиваться главной цели - передавать из одной точки пространства и времени в другую точку (пространство) сообщение с минимально возможными искажениями и с минимальной потерей информации. Только с этих позиций можно создавать новые, перспективные технические решения, например, в области бытовой радиотехники.
В качестве иллюстрации к вышесказанному рассмотрим еще ряд частных, актуальных задач, непосредственно относящихся к задаче изобретения, и покажем, как их следует решать, используя положения нового фундаментального закона природы.
Как уже отмечалось, в состав вышеописанных способов и систем для передачи сообщений любой физической природы входят действия по усилению электрических сигналов сообщений и соответственно устройства, предназначенные для реализации этих действий - усилители 3, 9. В настоящее время известно большое число технических решений по усилению электрических сигналов. К подобным устройствам, например, можно отнести всевозможные усилители-корректоры, микрофонные усилители, нормирующие усилители, усилители мощности различного класса. Вместе с тем до сих пор периодически возникают споры, как в среде специалистов и экспертов, оценивающих новые разработки и промышленно выпускаемую продукцию, так и в среде достаточно многочисленной армии меломанов, о преимуществах и недостатках тех или иных технических решений или используемой элементной базе при усилении электрических сигналов, и в первую очередь, при усилении сигналов в усилителях мощности. В подавляющем большинстве случаев эти дискуссии ведутся на уровне эмоций от прослушивания звуковых сигналов на различной аппаратуре. В результате часто делаются выводы, никак не основанные на положениях современной науки. Например, сомнению подвергается целесообразность использования в усилителях отрицательной обратной связи. Таким образом, ставятся под сомнения базовые, фундаментальные положения кибернетики, электроники, радиотехники. В защиту этих положений выступают специалисты, компетентные в этих вопросах. Например, в журнале "Радио", №4, 2003 г., стр.16-19 опубликована статья С.Агеева "Вопросы проектирования усилителей с общей ООС". В этой статье изложены основные моменты, на которые следует уделять внимание при проектировании высоколинейных усилителей с ООС. Процитируем ряд этих основных моментов и затем прокомментируем их.
"Напомним, что основной причиной изобретения усилителей с ООС Харольдом Блэком в 1927 г. была именно необходимость повышения линейности усилителей...
Проблемой повышения линейности усилителей Х.Блэк занимался в Bell Labs еще с 1921 г. Именно он разработал практически все известные способы компенсации искажений, а в частности, коррекцию искажений так называемой прямой связью, а также компенсацию искажений путем суммирования искаженного выходного сигнала с выделенным противофазным сигналом искажений. Эти меры, конечно, давали результат, но их было недостаточно.
Кардинальным решением проблемы линейности стало именно изобретение усилителей с OOC и, главное, их корректная практическая реализация, что было невозможно без создания соответствующей теории ("нет ничего практичней хорошей теории!"). Первый шаг в построении теории был сделан Гарри Найквистом, нашедшим применяемый и поныне метод определения устойчивости еще до замыкания петли ООС исходя из вида АЧХ и ФЧХ разомкнутой системы (годограф Найквиста).
Однако не все так просто. Несмотря на простоту и кажущуюся очевидность принципа работы ООС, для реального получения тех преимуществ, которые можно достичь с ее использованием, пришлось создать весьма обширную теорию обратной связи, отнюдь не сводящуюся к обеспечению устойчивости (отсутствия генерации). Ее построение было практически завершено выдающимся американским математиком голландского происхождения Хенриком Ваде Боде только к 1945 г. Чтобы была понятна реальная сложность задач, отметим, что даже первый патент Блэка на усилитель с ООС, в котором описаны далеко не вое проблемы, имеет объем небольшой книги - в нем 87 страниц. Кстати, всего Х.Блэк получил 347 патентов, значительная часть которых связана именно с реализацией усилителей с ООС. В сравнении с таким объемом работ все претензии современных "ниспровергателей основ", не создавших ничего и близко по уровню и зачастую даже ни разу не читавших (или не понявших) работ Блэка, Найквиста и Боде, выглядят по меньшей мере чрезмерно самоуверенными. Поэтому вопрос не в использовании ООС (реально она есть всегда, просто не всегда в явном виде), а в том, чтобы это использование было грамотным и приносило желаемый результат.
Итак, на что из "не описанного в учебниках" нужно обращать внимание при проектировании и оценке схемотехники усилителей с ООС?
Вначале напомним, что в формуле коэффициента передачи (передаточной функции) системы с обратной связью

фигурируют комплексные числа и функции, а именно:
 - комплексный коэффициент передачи (передаточная функция) цепи с ОС;
- комплексный коэффициент передачи (передаточная функция) цепи с ОС;
 - комплексный коэффициент передачи (передаточная функция) исходного усилителя.
- комплексный коэффициент передачи (передаточная функция) исходного усилителя.
Для получения корректных результатов вычисления нужно вести по правилам арифметики комплексных чисел, о чем нередко забывают даже авторы учебников.
Следующий момент. Важно понимать, что ООС не может снизить абсолютную величину приведенных к входу продуктов искажений и шумов по сравнению с ситуацией, когда петля ООС разомкнута, а уровни сигнала на выходе в обоих случаях одинаковы... Отметим также, что при замкнутой петле ООС продукты искажений, особенно высокого порядка, типа "зубцов" переключения плеч выходного каскада, аналогичны высокочастотным входным сигналам, и входной ФНЧ тут помочь не может. Именно поэтому для предотвращения катастрофического расширения спектра интермодуляционных искажений при введении ООС крайне желательно обеспечить более быстрый спад огибающей спектра продуктов искажений без ООС, чем скорость спада петлевого усиления. Условие это, к сожалению, не только малоизвестно (Боде на него лишь намекает, считая очевидным), но и крайне редко выполняется. По той же причине вводимая для устойчивости частотная коррекция не должна приводить к ухудшению линейности усилителя во всем диапазоне частот, вплоть до частоты единичного усиления и даже несколько выше. Наиболее очевидный способ достичь этого - выполнить коррекцию так, чтобы уменьшить непосредственно величину входного сигнала...
Сказанное объясняет желательность большого запаса линейности в каскадах, предшествующих тем, где формируется основной спад АЧХ - в усилителях с ООС это нужно, в первую очередь, для того, чтобы предотвратить существенное расширение спектра продуктов искажений.
Для повышения линейности входных каскадов наиболее эффективно использование местных OOC, обеспечивающих одновременно необходимый спад АЧХ и рост линейности (например, с катушками индуктивности в эмиттерных цепях входных каскадов). Частотно-зависимая местная ООС позволяет уменьшить потери глубины общей ООС в рабочей полосе частот.
Таким образом, при разработке усилителя с OOC необходимо обеспечить приемлемую (во всяком случае, не хуже нескольких процентов) линейность и лучшую стабильность характеристик без ООС именно в области частот, где петлевое усиление велико. Ряд мер по улучшению линейности на низких и средних частотах (например, введение так называемой следящей связи в каскадный усилитель) одновременно приводит к ухудшению стабильности характеристик и (или) снижению линейности на ВЧ. Поэтому их введение в усилители с ООС нецелесообразно.
В случае использования местных ООС для получения хороших результатов надо производить оптимизацию их частотных характеристик, так как каждая из них не только повышает линейность данного каскада, но и снижает петлевое усиление в цепи общей ООС. Задача эта нетривиальная, без очень аккуратного компьютерного моделирования тут не обойтись. В качестве правила первого приближения можно считать, что близким к оптимальному вариантом является тот, при котором вклад всех каскадов в результирующие искажения усилителя с ООС (при замкнутой петле ООС!) примерно одинаков.
Далее, для усилителей с общей обратной связью критически важно отсутствие динамических срывов слежения в цепи OOC. Это означает, что недопустимы динамические нелинейности, приводящие к скачкообразным изменениям характеристик, например из-за появления сеточных токов у ламп при подаче сигнала через разделительный конденсатор. Если же подобные явления по каким-либо причинам нельзя исключить, необходимо принять меры по нивелированию их влияния в областях частот, где петлевое усиление невелико (особенно в области частоты единичного усиления), используя, например, местные ООС...
Пропагандируемое рядом авторов разбиение общей петли ООС на несколько местных петель, несмотря на упрощение проектирования, нецелесообразно. Охват "местной" обратной связью более чем одного каскада в составе усилителя, как показано еще Боде, приводит к потере потенциально достижимой линейности. Например, последовательно включенные два каскада с местной ООС по 30 дБ будут иметь заведомо худшую линейность, чем эти два каскада, охваченные общей ООС глубиной 60 дБ в той же полосе частот...
Еще один частот упускаемый очень важный фактор реализуемости - конструктивное исполнение каскадов, охваченных обратной связью. Оно должно обеспечивать отсутствие паразитных пиков на спаде АЧХ и за полосой пропускания, вынуждающих для обеспечения устойчивости искусственно занижать быстродействие усилителя в целом. Наличие паразитных пиков на АЧХ резко снижает и достижимую без самовозбуждения глубину ООС...
Подводя итог краткого обзора, заметим, что любое проектирование - это набор компромиссов, поэтому очень важно, чтобы применяемые решения были взаимно увязаны между собой, а конструкция представляла собой единое целое". В этой статье описаны и другие моменты, на которые целесообразно, по мнению автора, обращать внимание при проектировании усилителей с OOC.
В качестве комментариев к вышеуказанным рекомендациям при проектировании и оценке схемотехники усилителей с ООС можно отметить следующее.
Безусловно, очень впечатляет объем работ, который был проделан в этой области техники Х.Блэком, а также высокий уровень научных работ Г.Найквиста и Х.В.Боде. Нельзя не согласиться с тем, что "нет ничего практичней хорошей теории!" и что применяемые решения должны быть увязаны между собой, а конструкция усилителя должна представлять единое целое. Вместе с тем, следует заметить, что подобными проблемами в последующем занимались и другие выдающиеся ученые. Большой вклад в осмысление и системное решение подобных задач внес выдающийся американский математик и философ Норберт Винер. В своей знаменитой книге "Кибернетика" он первым изложил принципиально новый взгляд на решение подобных задач и в первую очередь задач, связанных с автоматизацией процессов управления и синтезом наиболее совершенных машин или систем. Главной особенностью этого подхода являлась новая модель, описывающая основные принципы работы этих машин или систем.
В этой модели машины или системы долины работать целенаправленно, и для этого они должны обладать определенным интеллектом, который используется для корректировки их работы в зависимости от внутренних или внешних факторов. В этой модели любой управляемый (или синтезируемый) объект рассматривался в рамках предельно усложненной модели - как "черный ящик" с очень сложной, чаще всего неизвестной, неустойчивой внутренней структурой и на который также может оказываться внешнее воздействие, изменяющее как-то его свойства и способность выполнять какие-то действия или решать задачу, например усиливать электрические сигналы подобно усилителю мощности. В этой модели свойства этого объекта (усилителя) должны описываться некоторой более сложной функцией, чем традиционная передаточная функция усилителя электрических сигналов, представленная в формуле (1). Эта функция может являться не только комплексной функцией частоты, но и зависеть от других параметров и факторов. Например, от текущего спектра сигналов источника 1 сообщений, температуры, давления, влажности, механических воздействий (вибрации, ускорения) и, естественно, времени, поскольку эти параметры могут изменяться во времени. В моделях, которые использовали Х.Блэк, Г.Найквист и Х.В.Боде усилители рассматривались в более простой модели - как стационарные системы. Влияние вышеуказанных параметров считалось несущественным. В этом, собственно, и заключалось основное нововведение в построении новой, более совершенной теории анализа и синтеза машин. Эту модель описания материальных объектов Н.Винер обобщил на живые и неживые объекты, общим для которых являлось наличие сигналов обратной связи и некоторого органа или узла по обработке сигналов и формированию управляющих состоянием объекта сигналов. Причем эти вспомогательные управляющие сигналы должны своевременно оказывать некоторое "положительное" воздействие на этот "черный ящик" и компенсировать воздействия дестабилизирующих факторов. Например, обеспечивать на выходе усилителя форму усиленных сигналов, предельно достижимо точно повторяющую форму его входных сигналов. Таким образом, предложенная Н.Винером система, машина или в данном конкретном случае усилитель должны строиться по некоторой предельно укрупненной, единой функциональной структурной схеме. В состав этой схемы должен входить некоторый новый узел (аналог мозга у животного или человека), который как раз и должен обеспечивать сравнительный анализ входного ("опорного") и выходного ("искаженного") сигналов усилителя, вырабатывать сигналы управления, корректирующие его работу. И в работах (патентах) Х.Блэка, и в современной схемотехнике усилителей в качестве такого узла - блока 2 обработки использовались простейшие устройства, состоящие чаще всего из резисторов сумматора 17, частотно корректирующих конденсаторов и индуктивностей. Понятно, что с помощью этих простейших элементов (резисторов R0, R1 и входного сопротивления инвертирующего входа усилителя A1), обеспечивающих, например OOC в усилителе, показанном на фиг.21, в принципе, невозможно решить столь сложную задачу, поскольку в реальных условиях эксплуатации усилителя могут во времени меняться свойства и параметры всех основных элементов схемы (фиг. 21). Например, могут изменяться комплексные коэффициенты передачи усилителя A1, транзисторов VT9, VT10, емкость корректирующего конденсатора С1, а также в самом общем случае могут изменяться свойства линии связи, связывающей усилитель с нагрузкой RH (за счет, например, изменения ее длины, волнового сопротивления) и комплексное сопротивление самой нагрузки. Во-вторых, для получения выходного сигнала, по форме максимально точно повторяющего входной сигнал, необходимо сформировать предельно точно комплексный коэффициент  цепи ОС, и более того, максимально возможно быстро, стараться его подстраивать под текущие изменения передаточной функции
цепи ОС, и более того, максимально возможно быстро, стараться его подстраивать под текущие изменения передаточной функции  исходного усилителя или наоборот (что даже лучше) осуществлять предыскажения передаточной функции
исходного усилителя или наоборот (что даже лучше) осуществлять предыскажения передаточной функции  исходного усилителя с тем, чтобы комплексный коэффициент обратной связи
исходного усилителя с тем, чтобы комплексный коэффициент обратной связи  оставался неизменным. Реализация подобного подхода и выполнение этих действий может дать наилучшие результаты по "взаимной увязке между собой применяемых решений" с точки зрения современной научной методологии - кибернетики. Бессистемно используя общеизвестные рекомендации по "грамотному" применению ООС, невозможно синтезировать усилитель высшей формы организации, класса качества, группы сложности и т.д. Для этого в состав усилителя должен входить новый по функции и весьма сложный узел - блок 2 обработки сигналов. С его помощью можно (вместо предварительного, малоэффективного компьютерного моделирования корректирующих цепей усилителя) провести в реальном масштабе времени, на реальном усилителе, полнопараметрический анализ входных и выходных сигналов усилителя, сформировать оптимальные предыскажения усиливаемых сигналов (например, в каждом каскаде усиления), сформировать компенсационные сигналы для активного подавления внутри усилителя продуктов нелинейных и инермодуляционных искажений. Понятно, что во времена Н.Винера идея использования ЭВМ для повышения линейности усилителя выглядела бы слишком смелой. Во-первых, тогда не было ЭВМ с требуемыми параметрами для реально-временной обработки звуковых сигналов. Во-вторых, стоили эти машины в тысячи и даже десятки тысяч раз дороже, чем усилители. Они имели размеры целого здания и потребляли огромное количество электроэнергия. По всей видимости, по этим причинам отсутствовал интерес инвесторов и стимул для специалистов по разработке алгоритмов обработки в подобных устройствах. В настоящее время ситуация коренным образом изменилась. Современные ПК уже стоят на порядок дешевле усилителей так называемого HI-Ehd класса, а их характеристики позволяют реализацию весьма сложных алгоритмов обработки сигналов в реальном масштабе времени. Структурные схемы и алгоритмы работы подобных устройств в настоящее время также уже изобретены и запатентованы. Ряд из них подробно рассмотрен выше. Эти варианты реализации блоков 2 можно использовать по новому назначению для решения задачи повышения точности усиления электрических сигналов в усилителях различного назначения, например в усилителях мощности. Понятно, что новые функциональные связи между блоком 2 обработки и усилителем или подсистемой усилитель, связанный с нагрузкой, позволяют рассматривать эти технические решения как самостоятельные изобретения.
оставался неизменным. Реализация подобного подхода и выполнение этих действий может дать наилучшие результаты по "взаимной увязке между собой применяемых решений" с точки зрения современной научной методологии - кибернетики. Бессистемно используя общеизвестные рекомендации по "грамотному" применению ООС, невозможно синтезировать усилитель высшей формы организации, класса качества, группы сложности и т.д. Для этого в состав усилителя должен входить новый по функции и весьма сложный узел - блок 2 обработки сигналов. С его помощью можно (вместо предварительного, малоэффективного компьютерного моделирования корректирующих цепей усилителя) провести в реальном масштабе времени, на реальном усилителе, полнопараметрический анализ входных и выходных сигналов усилителя, сформировать оптимальные предыскажения усиливаемых сигналов (например, в каждом каскаде усиления), сформировать компенсационные сигналы для активного подавления внутри усилителя продуктов нелинейных и инермодуляционных искажений. Понятно, что во времена Н.Винера идея использования ЭВМ для повышения линейности усилителя выглядела бы слишком смелой. Во-первых, тогда не было ЭВМ с требуемыми параметрами для реально-временной обработки звуковых сигналов. Во-вторых, стоили эти машины в тысячи и даже десятки тысяч раз дороже, чем усилители. Они имели размеры целого здания и потребляли огромное количество электроэнергия. По всей видимости, по этим причинам отсутствовал интерес инвесторов и стимул для специалистов по разработке алгоритмов обработки в подобных устройствах. В настоящее время ситуация коренным образом изменилась. Современные ПК уже стоят на порядок дешевле усилителей так называемого HI-Ehd класса, а их характеристики позволяют реализацию весьма сложных алгоритмов обработки сигналов в реальном масштабе времени. Структурные схемы и алгоритмы работы подобных устройств в настоящее время также уже изобретены и запатентованы. Ряд из них подробно рассмотрен выше. Эти варианты реализации блоков 2 можно использовать по новому назначению для решения задачи повышения точности усиления электрических сигналов в усилителях различного назначения, например в усилителях мощности. Понятно, что новые функциональные связи между блоком 2 обработки и усилителем или подсистемой усилитель, связанный с нагрузкой, позволяют рассматривать эти технические решения как самостоятельные изобретения.
На фиг.22, схематично, показана структурная схема возможных вариантов подключения блока 2 к усилителю 5. Возможны различные варианты по формированию сигналов обратной связи, например общей ОС, а также различные варианты комбинации как отрицательной, так и положительной обратной связи. В качестве сигналов обратной связи можно использовать: сигнал с выхода усилителя (сигнал, поступающий на 1 вход В блока 2 обработки сигналов); сигнал со входа излучателя 4 (сигнал, поступающий на 1 вход С блока 2 обработки); сигнал, сформированный вблизи от излучателя 4. Это можно осуществить с помощью микрофона, установленного, например на расстоянии порядка 1÷25 мм от поверхности диффузора громкоговорителя 4 (сигнал, поступающий на 1 вход D), или этот сигнал можно сформировать посредством электромеханического преобразователя, установленного на поверхности диффузора громкоговорителя 4 (сигнал, поступающий на 1 вход Е блока 2 обработки сигналов),
На 1 вход А блока 2 обработки сигналы могут поступать и с выходов каскадов усилителя 3, 9, например, с выхода первого каскада усиления A1. В этом случае местная ОС также формируется блоком 2 обработки сигналов, например, составленным из двух блоков 2 обработки, работающих параллельно, но с различными постоянными времени регулирования. Замена конденсатора C1 на многофункциональный узел-блок 2 обработки сигналов позволяет осуществлять более точно коррекцию работы первого каскада усилителя A1, например, с учетом всех тех рекомендаций, которые содержатся в вышеописанной статье С.Агеева или в патентах Х.Блэка. Понятно, что посредством блока 2 обработки можно формировать не только сигналы отрицательной обратной связи, но и сигналы положительной обратной связи, которые функционально могут выполнять роль сигналов (компенсирующего тока i2), формируемых резистором R2 (фиг.21). На фиг.22 этот вариант схематично показан в виде пунктирной линии, связывающей блок 2 с базами транзисторов VT9, VT10.
Для повышения точности усиления сигналов возможны следующие конструктивные варианты построения блока 2 обработки сигналов.
Первый вариант реализации блока 2 обработки можно получить, если выполнить резистор R1, показанный на фиг.21, в виде узла, обеспечивающего многополосную обработку сигналов обратной связи с использованием, например, входных фильтров 14, регуляторов фаз 29, и уровней 31, входящих в состав блока 16 компонентов сигналов обратной связи, позволяющих путем предварительной экспериментальной подгонки и подбора этих регулировок сформировать требуемый вид передаточной функции  цепи ОС. Таких полос для выполнения требования к патентоспособности изобретения по новизне должно быть не менее двух. В крайних низкочастотных и высокочастотных полосах можно использовать в качестве фильтров 14 ФНЧ и ФВЧ, порядок которых подбирается (неавтоматически или автоматически) с использованием, например, общеизвестных методов синтеза фильтров по виду АЧХ и ФЧХ усилителя или его каскадов.
цепи ОС. Таких полос для выполнения требования к патентоспособности изобретения по новизне должно быть не менее двух. В крайних низкочастотных и высокочастотных полосах можно использовать в качестве фильтров 14 ФНЧ и ФВЧ, порядок которых подбирается (неавтоматически или автоматически) с использованием, например, общеизвестных методов синтеза фильтров по виду АЧХ и ФЧХ усилителя или его каскадов.
Второй вариант реализации блока 2 обработки можно получить, если резистор R0 сумматора, также как и резистор R1, выполнить в виде многополосных каналов обработки сигналов источника 1 сообщений. Этот вариант реализации блока 2 обработки позволяет осуществлять режим автоматизации всевозможных регулировок энергетических и временных параметров как сигналов источника 1 сообщений (для предыскажений комплексного коэффициента передачи  исходного усилителя), так и предыскажения энергетических и временных параметров сигналов обратной связи (для предыскажений комплексного коэффициента ) цепи ОС. Причем, как уже было показано выше, в этом варианте возможна самонастройка параметров системы обратной связи с учетом дестабилизирующих факторов (температуры, влажности, давления, старения элементов конструкций, например высыхание электролитических конденсаторов, параметров текущего спектра сигналов источника 1 сообщений и т.д.). В этом варианте также осуществляется автоматический поиск и компенсация всевозможных продуктов искажений. Эти действия являются следствием процесса фильтрации этих продуктов искажений - помех и их активного понижения (противофазного сложения) в усилителе. Помимо этого процесса, одновременно с ним, может осуществляться процесс многополосного порогового понижения шума электрических сигналов источника 1 сообщений перед их суммированием с сигналами для активного понижения продуктов искажений усилителя. Сформированный таким образом сигнал может подаваться как на вход усилителя 3, 9 или на его хотя бы один из каскадов. Этот метод двойной фильтрации сигналов позволяет эффективно фильтровать продукты искажений самого усилителя и фильтровать, например, стационарные помехи или наводки, например, частотой 50 или 100 Гц.
исходного усилителя), так и предыскажения энергетических и временных параметров сигналов обратной связи (для предыскажений комплексного коэффициента ) цепи ОС. Причем, как уже было показано выше, в этом варианте возможна самонастройка параметров системы обратной связи с учетом дестабилизирующих факторов (температуры, влажности, давления, старения элементов конструкций, например высыхание электролитических конденсаторов, параметров текущего спектра сигналов источника 1 сообщений и т.д.). В этом варианте также осуществляется автоматический поиск и компенсация всевозможных продуктов искажений. Эти действия являются следствием процесса фильтрации этих продуктов искажений - помех и их активного понижения (противофазного сложения) в усилителе. Помимо этого процесса, одновременно с ним, может осуществляться процесс многополосного порогового понижения шума электрических сигналов источника 1 сообщений перед их суммированием с сигналами для активного понижения продуктов искажений усилителя. Сформированный таким образом сигнал может подаваться как на вход усилителя 3, 9 или на его хотя бы один из каскадов. Этот метод двойной фильтрации сигналов позволяет эффективно фильтровать продукты искажений самого усилителя и фильтровать, например, стационарные помехи или наводки, например, частотой 50 или 100 Гц.
Возможен также вариант, при котором общая ООС в усилителе 3, 9 остается неизменной в виде традиционных элементов R0, R1, конструктивно расположенное внутри усилителя 3, 9, а блок 2 обработки подключают к входу и выходу стандартного усилителя 3 в виде дополнительной приставки. Этот вариант удобен тем, что не требует никаких конструктивных доработок усилителя 3, 9 и более устойчив к последствиям возможных адаптивных изменений в цепи ООС. Недостатком этого варианта можно считать ограниченный коэффициент усиления, который определяется соотношением резисторов R0 и R1, а также необходимостью ограничения диапазона частотно-энергетических и частотно-временных предыскажений в цепи ООС. Вышеуказанные адаптивные изменения в цепи ОС могут лишь снижать коэффициент усиления усилителя во всей полосе частот или на отдельных участках частот.
В качестве одного из примеров возможных схемотехнических решений описанных вариантов можно использовать, например, узлы схемы, показанной на фиг.19, совместно с практически любым стандартным усилителем 3, 9.
Сигнал источника 1 сообщений подают на 2 вход схемы (фиг.19) для каждой из полос обработки, которых может быть, например, 50 или 60. Сигнал обратной связи, например, с выхода усилителя 3, 9 подают на дополнительный вход блока 2 с тем же числом полос обработки сигналов обратной связи, а, например, на 1 вход блока 2 обработки подают ослабленный до рабочего уровня сигнал, например, с одной из обмоток трансформатора блока питания усилителя 5 для формирования из этих сигналов сигналов активного понижения наводок и помех, вызванных полями трансформатора питания усилителя 3, 9. Понятно, что подобных входов может быть несколько, например для активного понижения импульсных помех от строчного трансформатора телевизионного приемника, для активного понижения импульсных помех по цепям питания усилителя 3, 9 и т.д. Для каждого из таких сигналов параметры цепи обратной связи предварительно подбираются (автоматически или неавтоматически) и остаются неизменными или подстраиваются в процессе работы усилителя 3, 9. Адаптивным изменениям могут также подвергаться параметры сигналов сообщений. Например, в схеме (фиг.19) в составе усилителя может работать многополосный пороговый шумоподавитель сигналов источника 1 сообщений (при нижнем положении переключателя SA5) или шумоподавитель совместно с автоматическим эквалайзером, компенсирующем возможные амплитудно-частотные искажения исходного усилителя 3, 9, например, из-за нагрева и изменения емкостей конденсаторов частотной коррекции в каскадах усилителя 3, 9. Понятно, что, дополнив схему, показанную на фиг.19, узлами, позволяющими автоматизировать подбор фазовых параметров сигналов, можно существенно расширить функциональные возможности усилителя 3, 9 и реализовать вариант полнопараметрического анализа сигналов источника 1 сообщений, сигналов обратной связи, принятых шумовых сигналов наводок и помех, их обработать и сформировать посредством единственного сумматора 17 (например, выполненного на элементе D 3.4, подав на его входы сигналы с выхода переключателя SA5, резисторов R 64, R 87) выходные сигналы блока 2 обработки. Эти сигналы подают на вход усилителя 3, 9. При этом усилитель 3, 9 может иметь собственные местные и/или общую обратные связи, как положительные, так и отрицательные. Если сигнал обратной связи формируют вблизи излучателя (громкоговорителя 4, 10), то возможно осуществление корректировки работы усилителя 3, 9 совместно с другими узлами системы - линией, связывающей усилитель 3, 9 с громкоговорителем 3, 10. В этом варианте реализация, например, общей отрицательной обратной связи будет эффективно отслеживать и компенсировать не только продукты искажений собственно в усилителе 3, 9, но также и всевозможные искажения сигнала источника 1 сообщений, возникающие в линии связи и в громкоговорителе 4,10. Причем реализация этого варианта, например, в звукотехнике более предпочтительна, поскольку основные искажения происходят именно в громкоговорителях, и их уровень на порядки выше, чем в усилителях 3, 9. Нелинейные искажения громкоговорителей 4, 10 HI-FI класса составляют на номинальной мощности порядка 1-3%. На максимальной мощности они увеличиваются до 10% и выше. Эффективность подавления продуктов нелинейных и интермодуляционных искажений громкоговорителей в основном будет определяться временем задержки сигнала обратной связи (удаленностью микрофона, преобразующего звуковые колебания диффузора в электрические сигналы обратной связи) и частотой сигнала. Наиболее эффективным подавление нелинейных продуктов будет в низкочастотной части звукового спектра, что, например, очень важно в системах активного понижения шума. Охват подобной "местной" многополосной обратной связью этих узлов всей системы передачи сообщений может дать (за счет малой задержки сигнала обратной связи) существенное повышение точности передаваемых сигналов в протяженном канале связи. В подобной подсистеме уровень активного подавления продуктов нелинейных искажений может составлять уже не единицы дБ, как у аналогов, а значительно больше. Этот эффект будет наибольшим у систем с электромеханической обратной связью. Причем в подобных системах можно существенно снизить требования к точности расчета акустических систем. Рассогласование конструктивного оформления динамической головки (размера и конструкция ящика громкоговорителя 4, 10) с ее характеристиками будет компенсироваться системой, которая будет формировать АЧХ и ФЧХ громкоговорителя, связанного с усилителем 3, 9, близко к идеальной. Главное - обеспечить достаточно большой объем ящика для повышения эффективности воспроизведения низких частот, а также обеспечить необходимый запас по мощности усилителя 3, 9 и громкоговорителя 4, 10 для компенсации неравномерности АЧХ.
Следует отметить, что изменения энергетических и временных параметров сигналов источника 1 сообщений и сигналов обратной связи должно быть согласованным и взаимоувязанным. Эти регулировки должны во времени протекать так, чтобы усилитель 3, 9 не возбуждался в соответствующих частотных полосах. Например, если полностью исключить варьирование энергетическими и временными предыскажениями сигналов обратной связи, зафиксировав их (работа по памяти), то диапазон возможных регулировок энергетических и временных предыскажений параметров сигналов источника 1 сообщений (по входу) может быть любым. Он определяется перегрузочной способностью усилителя. В этой ситуации при линейной амплитудной характеристики цепи ОС сигналы обратной связи будут также пропорционально изменяться. Их уровни и фазы будут синхронно повторять предыскажения входных сигналов, естественно, с точностью, которую обеспечиваем данный усилитель. Если при этом не согласованно, одновременно производить автоматическую коррекцию энергетических и временных параметров сигналов обратной связи, например, в нескольких каскадах усиления, то можно для отдельных частот попасть в область неустойчивой работы усилителя. Поэтому самонастройку усилителя желательно проводить предварительно по сигналам удобной для этого формы (например, шумоподобным сигналам) и, например, последовательно во времени настраивать отдельные каскады усилителя 3, 9. Для выявления динамических особенностей усилителя 3, 9 можно в качестве тест-настроечных сигналов использовать сигнал типа "розовый шум", скорость нарастания которого варьируется. Таким образом, можно сочетать процессы исследования усилителя 3, 9 в частотной и временной областях, генерируя сложную форму входных тест-сигналов. Если возможности процессора или компьютера не позволяют осуществлять подобные достаточно сложные алгоритмы полнопараметрического анализа сигналов и самонастройки усилителя 3, 9, то желательно ограничить возможный диапазон регулировок как энергетических, так и временных параметров сигналов обратной связи, исходя из того, что в качестве усилителя 3, 9 будет использоваться усилитель высокого класса. Например, можно ввести ограничения по регулированию уровней компонентов сигналов обратной связи не более 10%, а фазы не более 20°. Причем анализ сигналов в полосе обработки может вестись по усиливаемым сигналам без использования специальных тест-сигналов, генерируемых блоком 2 обработки, а соответствующие предыскажения могут формироваться в паузах между сигналами источника 1 сообщений (для исключения динамических срывов в цепи ОС).
При формировании сигналов обратной связи можно использовать многопороговые методы анализа сигналов источника 1 сообщений и, в соответствии с их текущим уровнем, формировать передаточные свойства усилителя 3, 9 в соответствии с некоторым алгоритмом, оптимизирующим его работу. Например, можно в соответствии с определенным, текущим уровнем компонентов сигналов сообщений в соответствующей полосе анализа формировать некоторое текущее значение коэффициента передачи усилителя 3, 9 или формировать различный вид его амплитудной характеристики. Эти действия позволяют оптимизировать работу усилителя 3, 9 в соответствии с текущим энергетическим спектром сигнала сообщений. Например, большинство экспертов при сравнительном анализе ламповых и транзисторных усилителей, работающих на максимальной мощности, отдают предпочтение ламповым из-за мягкого, естественного их звучания. Причин этому несколько. Одна из них заключена в существенно различном виде их амплитудных характеристик. У транзисторных усилителей амплитудная характеристика имеет резкий излом. В результате этого при больших кратковременных уровнях сигналов происходит их ограничение, и появляется обширный спектр всевозможных продуктов искажений. У ламповых усилителей ограничение сигнала наступает плавно, и уровни и число нелинейных компонентов сигнала значительно ниже, чем у транзисторных усилителей. Эти искажения на слух менее заметны. Кроме того, из-за реактивных составляющих нагрузки, например в многополосных колонках с разделительными фильтрами на R, L, С элементах, на отдельных частотах, сопротивление нагрузки может резко отличаться од типовых (расчетных) значений, например, уменьшаться с 8 Ом до 2÷3 Ом, и мощности транзисторного усилителя для работы на эту низкую нагрузку просто может не хватать. Вследствие этого также появляются искажения. Поэтому при конструировании транзисторных усилителей стараются обеспечить значительный запас по мощности (чтобы не происходили ограничения по амплитуде и току усиленного сигнала). Например, в транзисторных усилителях HI-End класса в выходных каскадах устанавливают в каждом плече порядка 10÷20 мощных транзисторов, работающих в режиме А или чаще АВ. Суммарный ток, протекающий через эти транзисторы, может составлять до нескольких ампер при напряжении их питания порядка ±30÷50 В. Поэтому для усилителей подобной конструкции на одно из первых мест выходит проблема отвода тепла (от нескольких сот ватт до примерно киловатта мощности), термостабилизации - и надежности усилителя. Перегрев усилителя приводит к снижению уровня усиления сигналов источника 1 сообщений без существенных их искажений. Поэтому, используя результаты анализа текущего энергетического спектра сигнала сообщений, поступающих на вход усилителя, можно выработать управляющие сигналы и сформировать требуемый вид амплитудной характеристики транзисторного усилителя, которая минимизирует искажения, связанные с резким ограничением сигналов по уровню, сформировать текущее значение напряжения питания, с одной стороны, исключающего ограничения пиковых значений сигналов, с другой стороны, минимизирующего бесполезный расход тепла на нагрев окружающей среды, сформировать оптимальный энергетический режим усилителя (например, путем перевода усилителя из режима А в режим АВ или В), сформировать конфигурацию усилителя, например, путем подключения в работу дополнительных каскадов-усилителей тока - для минимизации перегрузки усилителя по току при работе на комплексную нагрузку и, наконец, сформировать оптимальный режим охлаждения усилителя 3, 9, например, путем включения вентиляторов или системы водяного охлаждения. Понятно, что все эти функции можно реализовать любым известным способом посредством вышеуказанных сигналов управления и в соответствии с конкретным алгоритмом этих действий. Для синхронизации во времени процессов перевода усилителя 3, 9 в соответствующее состояние можно использовать аналогичные вышеописанным технические решения по дополнительной задержке сигналов, поступающих на вход усилителя 3, 9 соответственно времени, необходимому для выработки этих управляющих сигналов, например выключать и выключать вентилятор, охлаждающий усилитель во время сигналов достаточно высокой громкости, чтобы замаскировать звуковые шумовые помехи от его работы, если в состав усилителя не входит система активного подавления этих помехе.
Таким образом, описанные выше варианты поэтапной обработки сигналов: в каскадах усиления усилителей сигналов, в громкоговорителях, канале связи, а также в блоках обработки сигналов, позволяют оперативно выявлять искажения различной природы и формировать сигналы, с одной стороны, компенсирующие эти искажения, а с другой стороны, корректировать параметры передаваемых сигналов сообщений. При этом для компенсации шумов используются методы активного противофазного сложения сигналов или метод прерывания передаваемого сообщения и помех на частотах, где уровень сигнала мал, а уровень помехи высок. За счет этого удается повышать точность передаваемого сообщения.
В заключение можно отметить, что новые технические решения, описанные в этом изобретении, являются оптимальными не только для решения технических задач. Они могут быть использованы при разработке новых социально-экономических моделей развития общества и организации промышленного производства. Например, заменив технические категории и понятия (фильтры, усилители, схемы сравнения, шумоподавители, корректоры и т.д.) на их аналоги - экономические и социально-общественные категории (министерства, ведомства, отделы планирования, управления, снабжения, исполнительные органы власти - армию, полицию, спецслужбы, судебные органы и т.д.), можно от традиционных способов развития цивилизации, основанных на бессистемном принятии, часто, ошибочных решений, перейти к новым, научным, прогрессивным методам управления общественной и производственной деятельностью людей. Этот подход позволит привести в соответствие техническую и экономическую кибернетики, поскольку законы, по которым наиболее эффективно могут функционировать сложные системы вне зависимости от их физической природы, числа компонентов, частот и т.д., подчиняются одним и тем же законам природы - закону МИНИМИЗАЦИИ РОСТА ЭНТРОПИИ. Понятно, что в экономических, социальных и производственных системах должны использоваться соответствующие "источники 1 сигналов сообщений". К этим "источникам" можно отнести, например, основные положения Библии, основные и вспомогательные законы, содержащиеся в Конституциях стран, всевозможных Кодексах, различные международные соглашения, договоры, а на производстве - производственные планы и задания, в бизнесе - бизнес-планы и т.д. Выполнение и соблюдение этих норм, правил, планов работ во многом аналогично передаче сообщений в пространстве и во времени в условиях помех. Например, высокоэффективное промышленное производство с использованием конвейеров требует четкого выполнения строго определенных операций. "Уровни" и "фазы" этих операций (действий) должны четко соответствовать ранее запланированным. В противном случае конвейер остановится, и высокоэффективное производство промышленной продукции станет невозможно. Высокоэффективное управление инвестиционными ресурсами также требует оперативного сбора как внешней экономической и научно-технической информации, так и информации внутри инвестиционной структуры, чтобы обеспечить условия максимально быстрой, квалифицированной обработки этой информации и своевременного принятия верных управленческих решений о инвестировании средств в перспективные предприятия, страны или корпорации. Понятно, что структуры, занимающиеся обработкой информации, могут быть вложены друг в друга в соответствии с иерархией системы подобно местным локальным и общим обратным связям в высокоорганизованных системах передачи сообщений. Они могут иметь различный уровень сложности, функциональные возможности и внутреннюю архитектуру. Но любая высокоорганизованная общественная или производственная система должна функционировать по тем же единым принципам, что и высококачественная система для передачи звуковых сообщений. В системе должна собираться информация во всем "спектре" - по всем направлениям функционирования этой системы и информация о "помехах". В результате этой обработки должны формироваться сигналы, корректирующие ее работу, например решения о своевременном инвестировании средств в конкурентноспособные фирмы. Невыполнение этих действий снижает прибыль инвесторов и мешает развитию науки, техники и цивилизации в целом. В этом легко убедиться, проанализировав историю развития цивилизации на Земле. Примеров предостаточно.
Промышленная применимость
Предложенные технические решения могут использоваться практически во всех областях науки, техники и производства, поскольку они раскрывают содержание нового фундаментального закона природы - ЗАКОНА МИНИМИЗАЦИИ РОСТА ЭНТРОПИИ.

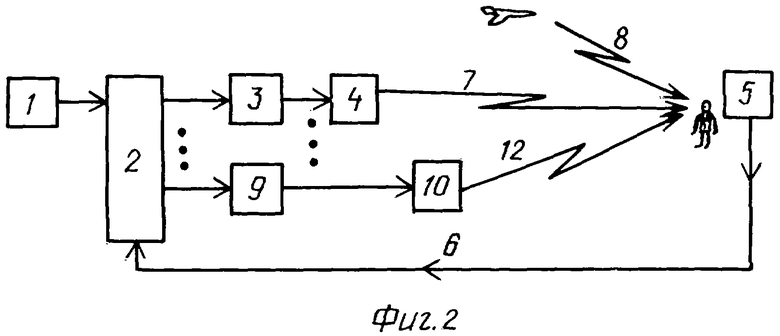
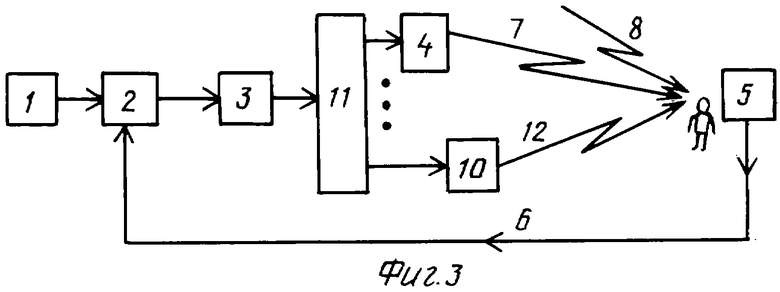




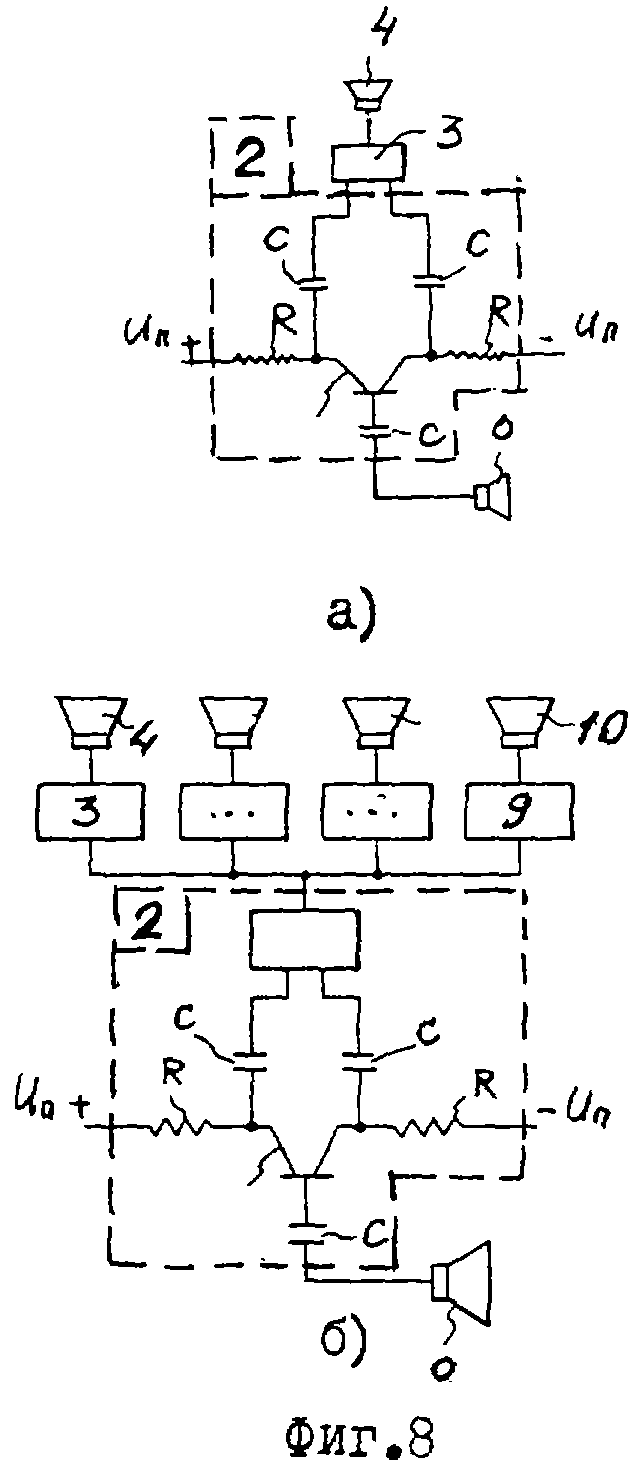
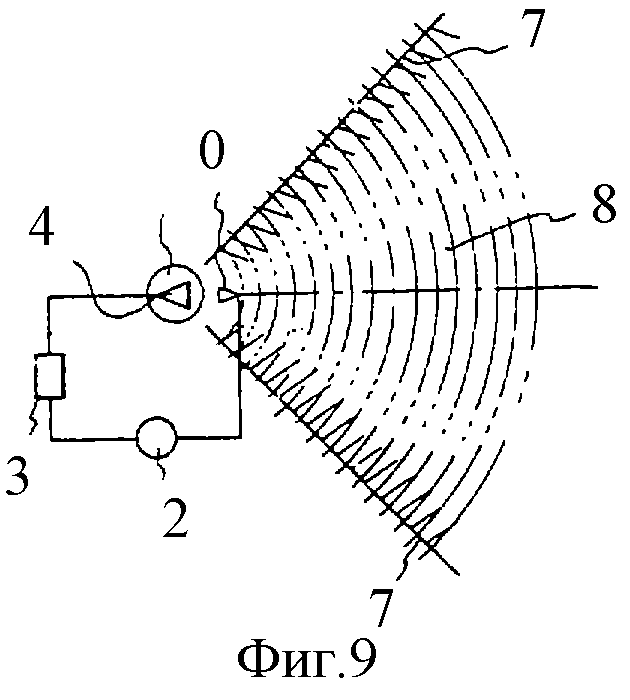
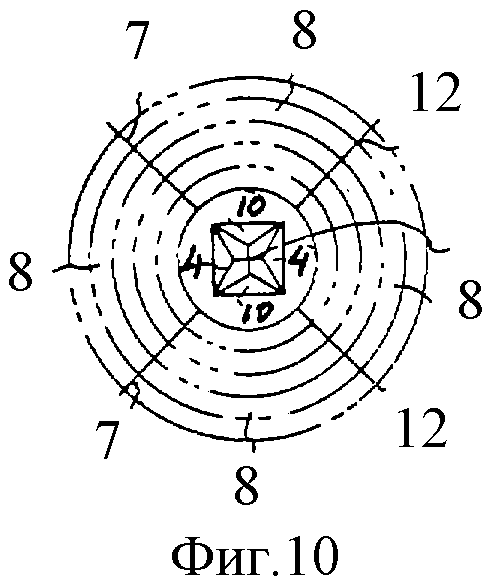
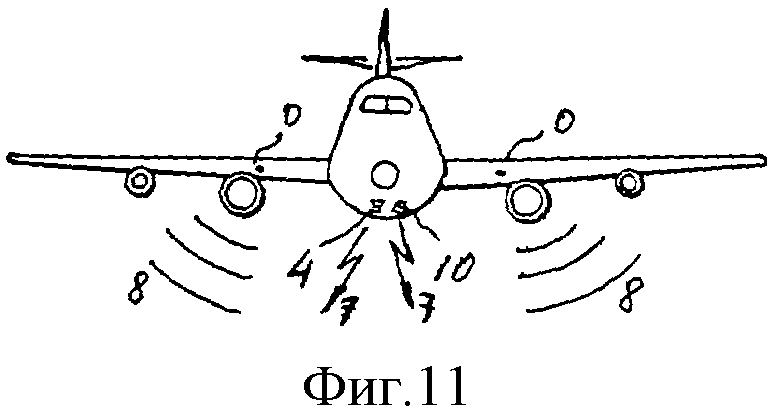
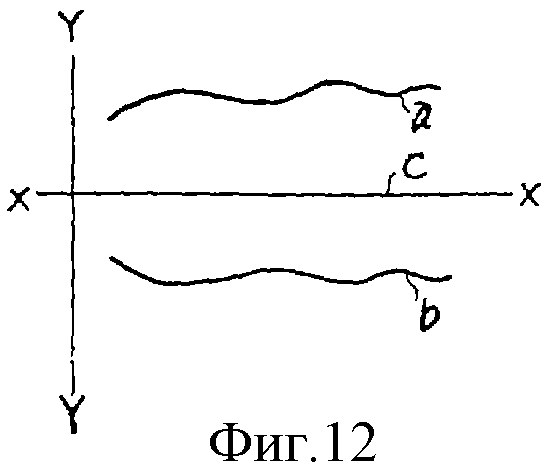
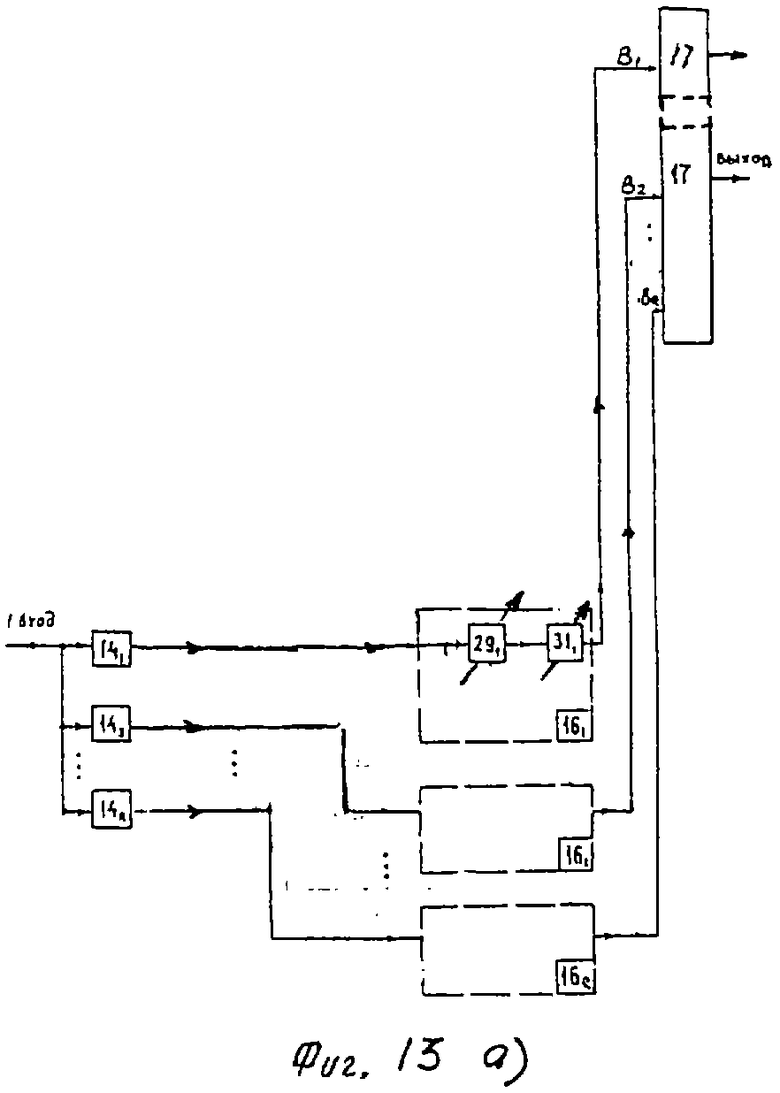
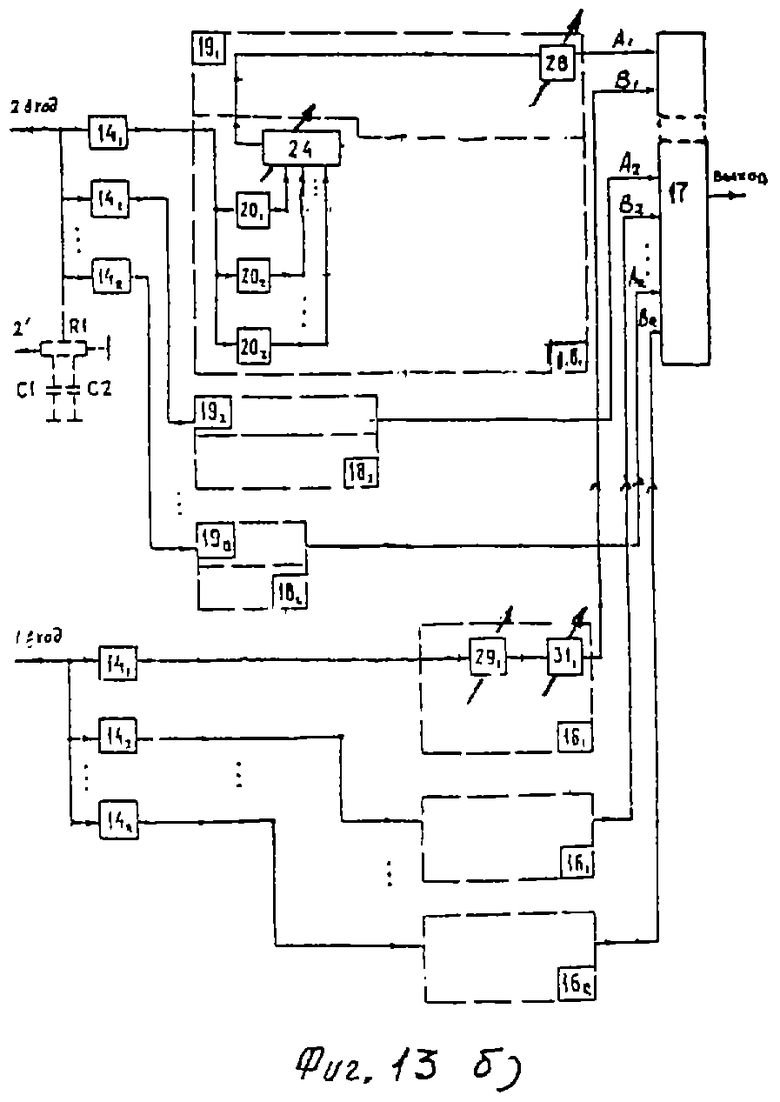
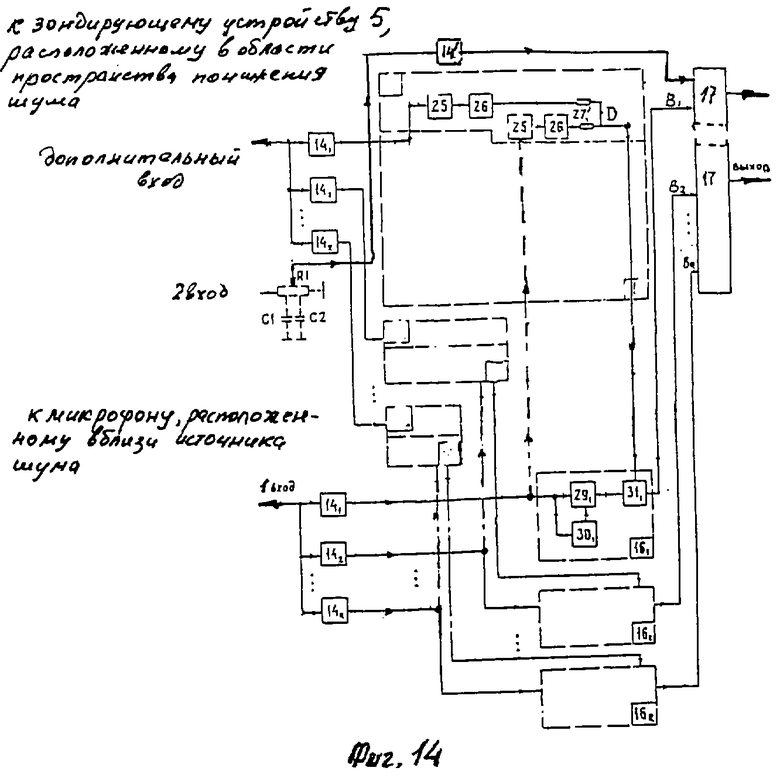
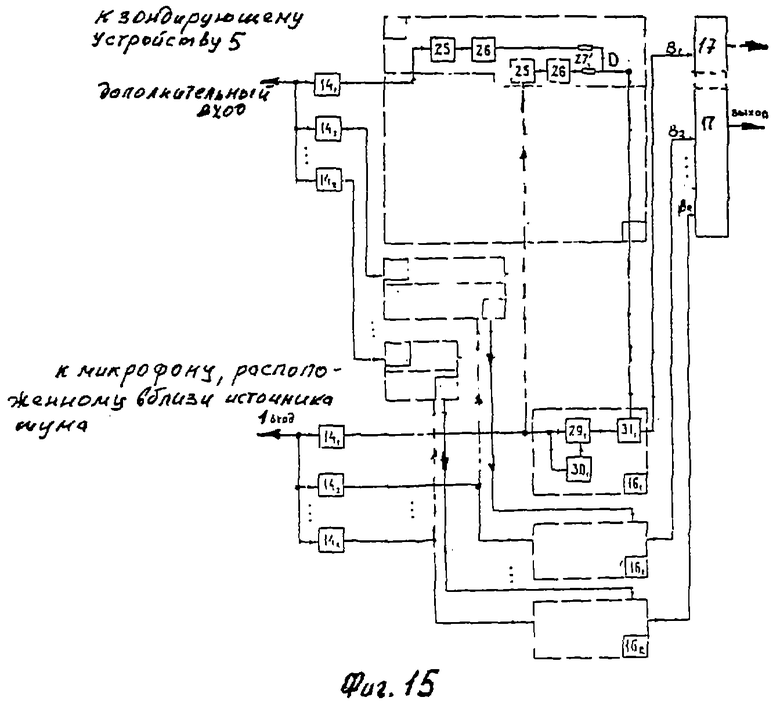
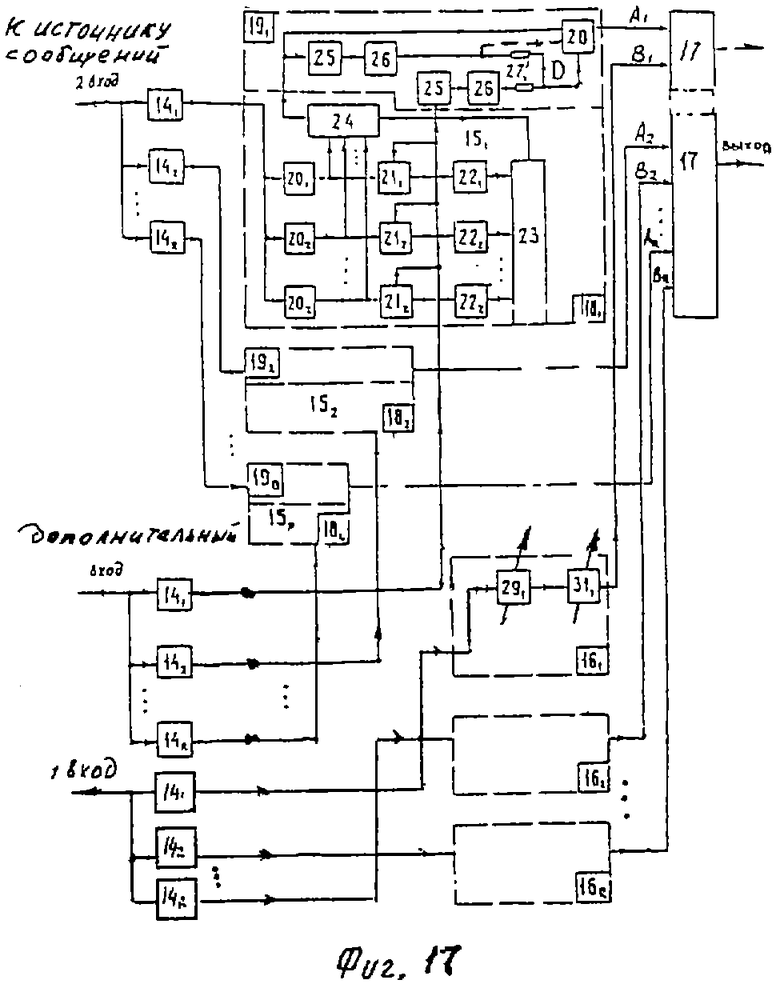
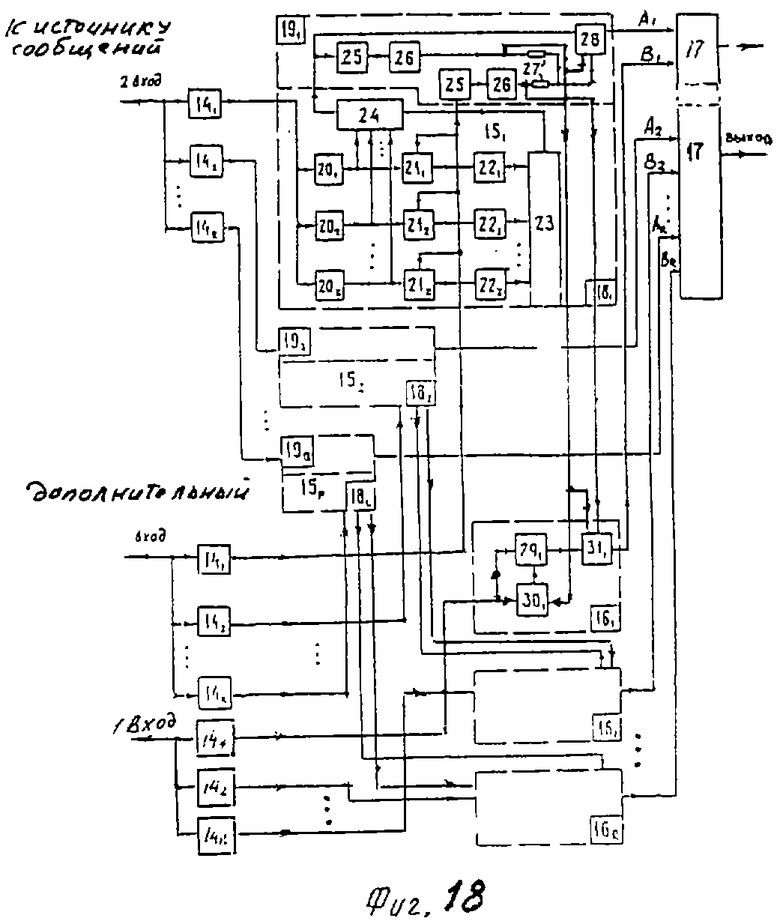
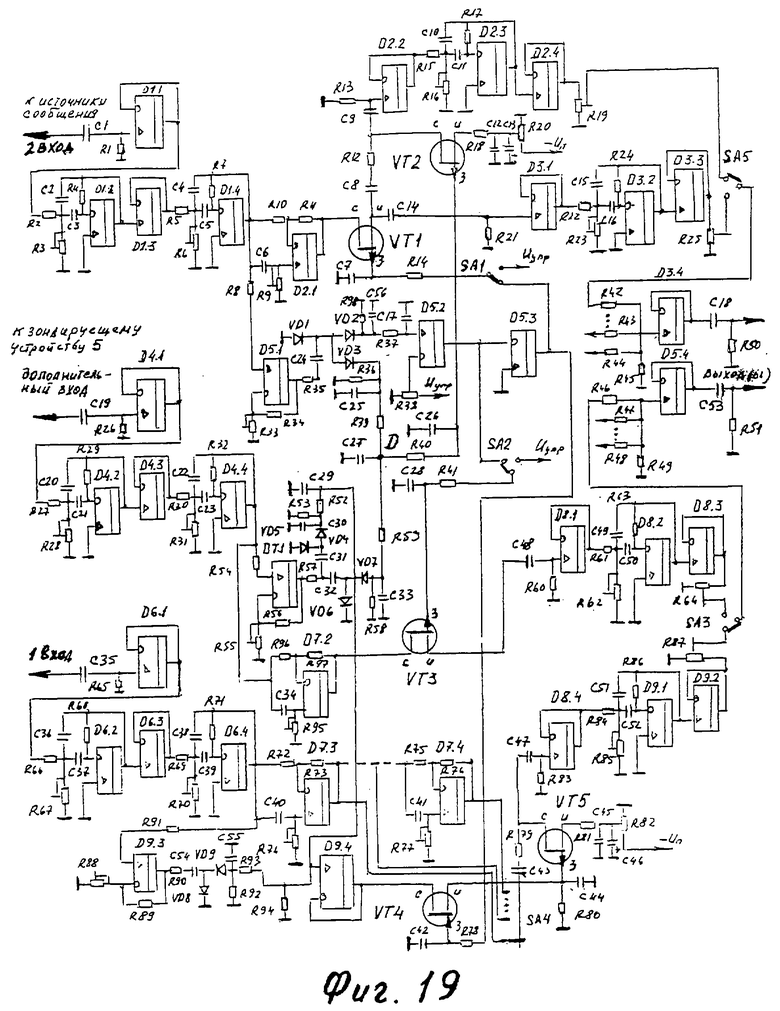

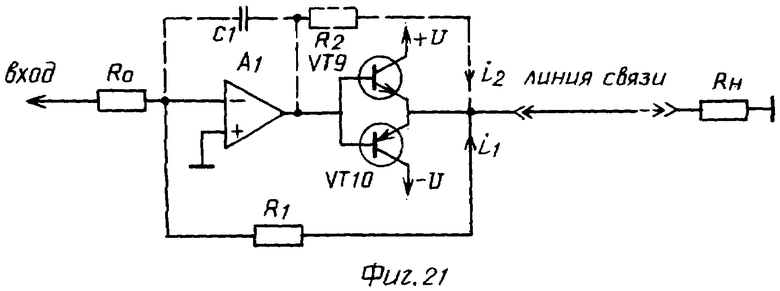

Изобретение относится к радиотехнике. Технический результат состоит в нахождении оптимального способа передачи сообщений в каналах с помехами. Для этого предлагаются различные варианты способа для активного понижения шумов и передачи сообщений на примере передачи и понижения шумов звуковых сигналов. В изобретении описан процесс усиления электрических сигналов, например, в усилителях мощности, а также многополосно-пороговый шумоподавитель. При усилении электрических сигналов традиционная обратная связь выполняется в виде нового многофункционального узла - блока обработки сигналов. Этот узел может быть выполнен, например, с использованием ЭВМ и позволяет обеспечить формирование требуемых электрических параметров цепи обратной связи, а также сформировать ряд новых сигналов управления для оптимизации режима работы усилителей. 3 н. и 33 з.п. ф-лы, 22 ил.
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1996 |
|
RU2106075C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПЕРЕДАЧИ СООБЩЕНИЙ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ, НАПРИМЕР, СПОСОБ ОПТИМАЛЬНОГО ЗВУКОВОСПРОИЗВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПТИМАЛЬНОГО, ПРОСТРАНСТВЕННОГО, АКТИВНОГО ПОНИЖЕНИЯ УРОВНЯ СИГНАЛОВ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ | 1997 |
|
RU2145446C1 |
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1996 |
|
RU2106073C1 |
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1996 |
|
RU2106075C1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |

