Изобретение относится к области инфракрасной техники и может быть использовано в радиотехнических системах.
Известен дальномер, описанный в патенте №2081438. В нем трехсекционный инфракрасный приемник вращается в режиме секторного или кругового обзора с помощью привода. В приемнике осуществляется преобразование инфракрасной энергии в электрическую и выделение сигналов от ожидаемых объектов по их характеристикам. В качестве базы используется ширина объектива приемника. Дальность определяется с помощью измерительного устройства по величине временного рассогласования между сигналами от двух инверторов, срабатывающих при фиксации равенства амплитуд сигналов в вычитателях амплитуд. Однако разрешающая способность по азимуту зависит от ширины центральной секции объектива приемника.
Известен дальномер, заявленный как устройство обработки сигналов, изложенный в патенте №2232401 от 10.07.2004 г., бюл. 19. Он определяет дальность и до подвижных объектов. Кроме упомянутых узлов в первом аналоге в его состав входят: датчик азимута и азимутальных меток, блок элементов совпадения, блок вторичной обработки, два вычитателя и блок выдачи корректируемой константы.
Принцип работы этих узлов заключается в следующем.
В качестве базы используется часть объектива трехсекционного инфракрасного, приемника, ограниченная вертикальными параллельными отрезками, находящимися в середине рабочей зоны центральной секции. Датчик азимута и азимутальных меток, жестко связанный с приводом, выдает азимут и азимутальные метки в блок вторичной обработки, через блок элементов совпадения, в момент наличия сигнала разрешения с одного из инверторов. Блок вторичной обработки осуществляет автосопровождение по азимуту излучателей, в том числе и движущихся и определяет их смещение за время между двумя сигналами от инверторов, поступающих с группы выходов измерительного устройства. Это смещение может иметь положительное или отрицательное значение, и оно вычитается в вычитателе из вышеупомянутого времени между сигналами. В результате определяется значение дальностей до движущихся объектов, которое далее поступает на другой вычитатель, куда также поступает корректируемая константа, зависящая от временного рассогласования между следующими друг за другом азимутальными метками, характеризующими скорость вращения привода. Отличие этой скорости от скорости, определяемой при юстировке, определяет величину константы. В результате окончательно уточненное значение дальности отображается на индикаторе. Однако разрешающая способность по азимуту также зависит от ширины центральной секции приемника.
С помощью предлагаемого устройства увеличивается разрешающая способность по азимуту, при этом инфракрасный приемник является пятисекционным с ограниченными полями зрения боковых секций, который вращается в режиме секторного или кругового обзора с помощью привода, сигнал от центральной секции приемника поступает на индикатор, при этом боковые секции соединены с первым вычитателем и вторым вычитателем так, чтобы дальность возможно было определить с помощью измерительного устройства по величине временного рассогласования от двух инверторов, срабатывающих при фиксации равенства амплитуд сигналов в вычитателях амплитуд.
На фиг.1 и в тексте приняты следующие обозначения.
1 - пятисекционный инфракрасный приемник с ограниченными полями зрения боковых секций;
2 - вычитатель амплитуд;
3 - инвертор;
4 - измерительное устройство;
5 - вычитатель амплитуд;
6 - инвертор;
7 - индикатор;
8 - датчик азимута и азимутальных меток;
9 - блок элементов совпадения;
10 - блок вторичной обработки;
12, 13 - вычитатели;
14 - блок выдачи корректируемой константы,
при этом выход вычитателя амплитуд 2 через инветор 3 соединен с первым входом измерительного устройства 4, имеющего второй вход, соединенный с отдельным входом блока элементов совпадения 10 и соединенный через инвертор 7 с выходом вычитателя амплитуд 6, а измерительное устройство 4 соединено с вычитателем 12 и с блоком вторичной обработки 11, соединенным через вычитатель 12 с вычитателем 13 и через блок элементов совпадения 10 с датчиком азимута и азимутальных меток 9, жестко связанного с приводом 5 и имеющего выход, соединенный с входом блока вторичной обработки и с входом блока выдачи корректируемой константы 14, соединенный через вышеупомянутый вычитатель 13 с индикатором 8, соединений с центральной секцией пятиекционного инфракрасного приемника с ограниченными полями зрения боковых секций 4 и эти боковые секции соединены с вычитателями амплитуд 2 и 4.
Работа устройства осуществляется следующим образом.
Пятисекционный инфракрасный приемник с ограниченными полями зрения боковых секций 1 вращается в режиме секторного или кругового обзора с помощью привода 5. В приемнике осуществляется преобразование инфракрасной энергии в электрическую и выделение сигналов от ожидаемых объектов по их характеристикам. В качестве базы используется ширина объектива. Дальность определяется с помощью измерительного устройства 4 по величине временного рассогласования от двух инверторов 3, 7, срабатывающих при фиксации равенства амплитуд сигналов в вычитателях амплитуд 2, 6.
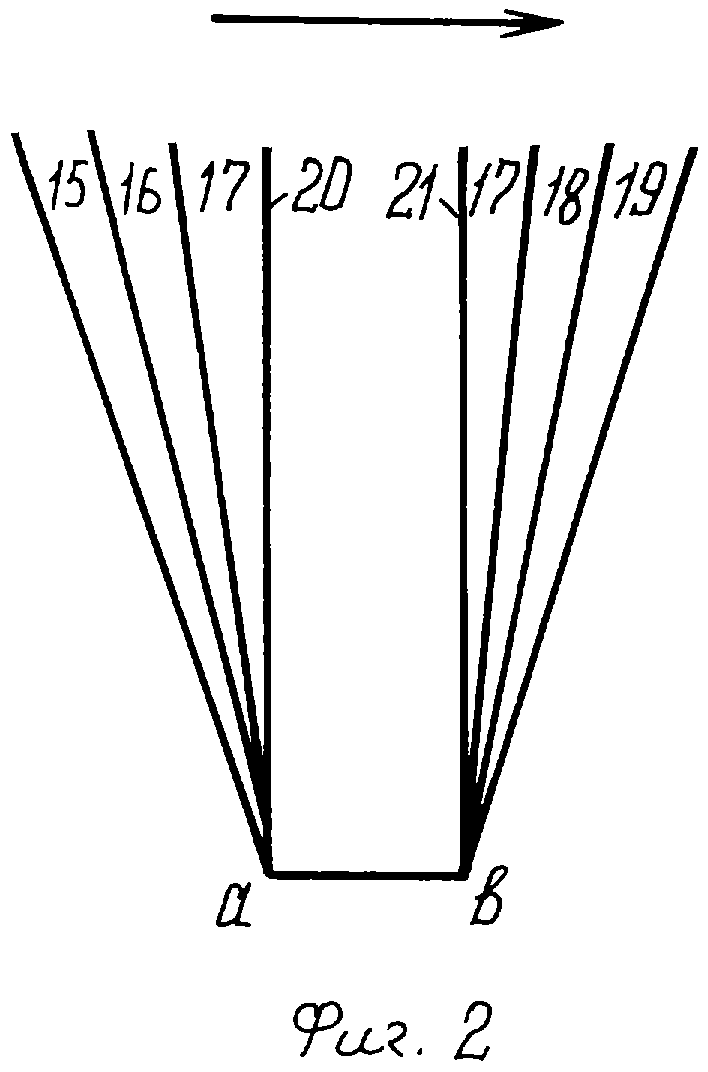
На фиг.2 показаны поля зрения вращающихся секций 15, 16, 17, 18 и 19. Секции 15, 16 и 18, 19 имеют равные поля зрения, которые ограничены по сравнению с полем зрения секции 17. Параллельные линии 20 и 21, исходящие из точек «а» и «в», характеризуют величину базы и могут быть разнесены друг относительно друга, например, на 20 см. Поля зрения каждой из секции 15, 16 и 18, 19 могут составлять 0,5 градусов, а поле зрения секции 17 может быть пять градусов. При увеличении дальности временное рассогласование между сигналами уменьшается. При пересечении излучателей боковых секций при вращении приемника в моменты равенства сигналов, поступающих от секций 18, 19 на выходе вычитателя 2 будет минимальная амплитуда и сработает инвертор 3, а при равенстве сигналов, поступающих от секций 15 и 16, на выходе вычитателя 6 будет минимальная амплитуда и сработает инвертор 7. Таким образом, благодаря меньшему полю зрению боковых секций увеличивается разрешающая способность по азимуту и создается возможность определять дальность до многих объектов. Сигнал от центральной секции приемника поступает в индикатор для отображения при наличии излучателей в процессе обзора. Для увеличения точности определения дальности до движущихся объектов используется блок вторичной обработки 11. Он осуществляет автосопровождение по азимуту излучателей, в том числе и движущихся, и определяет их смещение за время между двумя сигналами от инверторов, поступающих на вторую группу входов блока вторичной обработки. Это смещение может иметь положительное или отрицательное значение, и оно вычитается в вычитателе 12 из вышеупомянутого времени между сигналами. В результате определяется значение дальности и до движущихся объектов, которое далее поступает в вычитатель 13.
Пример конкретного исполнения датчика азимута и азимутальных меток представлен, например, в книге «Радиотехнические системы». Казаринов, Высшая школа, стр.414, 1990 г.
Пример конкретного исполнения блока вторичной обработки, осуществляющего в том числе и автосопровождение по азимуту, представлен в вышеупомянутом источнике на стр.197, рис.7, 5а.
Пример конкретного исполнения измерительного устройства представлен, например, в книге Васин В.В., Степанов Б.М. «Справочник-задачник по радиолокации», М., 1977, стр.214, фиг.9.7. На вторую группу входов вычитателя 13 также поступает корректируемая константа с блока выдачи корректируемой константы 14. Эта константа зависит от временного рассогласования между следующими друг за другом азимутальными метками с датчика 9, характеризующими скорость вращения привода. Отличие этой скорости от скорости, определяемой при юстировке, определяет величину константы.
Пример конкретного исполнения блока корректирующей константы представлен в патенте автора №2164004, заявка №98116202, бюл. 16 от 10.06.2000 г. под названием «Устройство для измерения линейных размеров объектов», где функции блока 14 выполняет корректор размера. В вычитатель 13 также поступает поправка, зависящая от отличия текущего временного рассогласования между метками от временного рассогласования, имеющего место при юстировке. Таким образом, в вычитателе 13 имеет место код, характеризующий уточненное значение дальности до излучателя, которое и отображается на индикаторе 8.
В предлагаемом устройстве благодаря уменьшению поля зрения боковых секций приемника создается возможность определить дальность до многих объектов в поле зрения инфракрасного приемника, работающего на проходе. Это осуществляется благодаря увеличению разрешающей способности по азимуту. Например, за время пересечения собственного поля зрения приемником, имеющим вышеупомянутые поля зрения, а именно каждого из боковых секций 0,5 градусов и центральной секции 5 градусов, может быть определена дальность до 10 объектов, каждый из которых имеет размер не более 50 м, находящихся на расстоянии 3 км на отличных друг от друга направлениях в поле зрения центральной секции. При этом могут быть использованы два повернутых друг от друга инфракрасных приемника, разнесенных на некоторое расстояние, имеющих общее количество секций, равное пяти. При этом в каждом приемнике находятся по две боковые секции и половина центральной секции.
Устройство можно использовать в системах охраны объектов, и для обнаружения, например, многих малоразмерных и среднеразмерных излучателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| ДАЛЬНОМЕР | 1994 |
|
RU2081438C1 |
| ДАЛЬНОМЕР | 1994 |
|
RU2084926C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2313106C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2288483C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| ТЕЛЕВИЗИОННЫЙ ДАЛЬНОМЕР | 1995 |
|
RU2096809C1 |
| ТЕЛЕВИЗИОННЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2310887C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
Дальномер состоит из двух вычитателей амплитуд, двух инверторов, измерительного устройства, привода, индикатора, датчика азимута и азимутальных меток, блока элементов совпадения, блока вторичной обработки, двух вычитателей, блока выдачи корректируемой константы и инфракрасного приемника. Указанный инфракрасный приемник является пятисекционным с ограниченными полями зрения боковых секций и вращается в режиме секторного или кругового обзора с помощью привода. Технический результат: увеличение разрешающей способности дальномера по азимуту. 2 ил.
Дальномер, состоящий из двух вычитателей амплитуд, двух инверторов, измерительного устройства, привода, индикатора, датчика азимута и азимутальных меток, блока элементов совпадения, блока вторичной обработки, двух вычитателей, блока выдачи корректируемой константы и инфракрасного приемника, причем выход первого вычитателя амплитуд через первый инвертор соединен с первым входом измерительного устройства, имеющего второй вход, соединенный с отдельным входом блока элементов совпадения и соединенный через второй инвертор с выходом второго вычитателя амплитуд, измерительное устройство соединено с блоком вторичной обработки, определяющим смещение объекта по азимуту за время между двумя сигналами от инверторов, и с первым вычитателем, при этом блок вторичной обработки соединен через первый вычитатель со вторым вычитателем и через блок элементов совпадения с датчиком азимута и азимутальных меток, жестко связанного с приводом и имеющим выход, соединенный с входом блока вторичной обработки и с входом блока выдачи корректируемой константы, характеризующей скорость вращения привода, соединенного через второй вычитатель с индикатором, при этом инфракрасный приемник является пятисекционным с ограниченными полями зрения боковых секций, который вращается в режиме секторного или кругового обзора с помощью привода, сигнал от центральной секции приемника поступает на индикатор, при этом боковые секции соединены с первым вычитателем и вторым вычитателем так, чтобы дальность возможно было определить с помощью измерительного устройства по величине временного рассогласования от двух инверторов,
срабатывающих при фиксации равенства амплитуд сигналов в вычитателях амплитуд.
| ДАЛЬНОМЕР | 1994 |
|
RU2084926C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ НОЧНОГО/ДНЕВНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2187138C2 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| US 5189461 A, 23.02.1993 | |||
| ДАЛЬНОМЕР | 1994 |
|
RU2081438C1 |

