Изобретение относится к области оптической локации и может быть использовано в системах предупреждения столкновений с воздушными объектами и в системах управления воздушным движением.
Известен оптический локатор (патент RU N 2010264, кл. 601 S 17/00, 1991). Здесь с помощью непрерывного оптического локатора осуществляются сканирование лазерного луча в прямом и обратном направлении, определение дальности и направления по временным рассогласованиям между двумя сигналами от одного и того же объекта с помощью блока обработки, определяющего дальности и направления. Однако время обзора ограничено возможностями сканирования в прямом и обратном направлении с помощью одного оптико-механического сканирующего устройства.
Известен оптический локатор (патент RU N 2028645, кл. 601 S 17/00 от 02.12.91). В нем с помощью двух разнесенных на базовое расстояние колеблющихся зеркал и призм осуществляется сканирование непрерывного лазерного луча по строкам и кадру. Вращение двух колеблющихся зеркал и призм осуществляется с помощью приводов. Луч на второе колеблющееся зеркало поступает, отразившись от облучателя. Привод колеблющихся зеркал осуществляет качание этих зеркал с помощью кулачкового механизма и валов. С приводом первой призмы жестко связан датчик азимутальных меток, используемый для выдачи азимута. Отраженные от объекта сигналы, предварительно отразившись от призм и колеблющихся зеркал, поступают далее на входы первого и второго лазерных приемников, где световая энергия преобразуется в электрические сигналы. Временное рассогласование между сигналами представляет собой дальность. В отличие от аналога скорость обзора может быть увеличена. Однако недостатком устройства является большая громоздкость из-за наличия базы 10 м и более.
С помощью предлагаемого устройства без уменьшения скорости обзора уменьшается громоздкость из-за отсутствия базы. Достигается это введением в качестве второго привода привода обратного вращения, второго датчика азимутальных меток, генератора нарастающего пилообразного напряжения, генератора спадающего пилообразного напряжения, электрооптического отклоняющего устройства, отражательного зеркала, двухлучевого индикатора с линейной разверткой, блока обработки и формирователя управляющих импульсов, состоящего из двух элементов совпадения, двух симметричных триггеров и усилителя, при этом привод обратного вращения жестко связан со второй призмой и со вторым датчиком азимутальных меток, имеющим выход, соединенные через первый вход формирователя управляющих импульсов с первым входом первого элемента совпадения, имеющего второй вход и выход соответственно соединенные с выходом второго симметричного триггера и с входом первого симметричного триггера, а также через первый выход формирователя управляющих импульсов, генератор спадающего пилообразного напряжения с первым входом двухлучевого индикатора с линейной разверткой, имеющего оптическую связь с блоком обработки и второй, третий и четвертый входы, соответственно соединенные с выходом первого лазерного приемника, с выходом второго лазерного приемника и через генератор нарастающего пилообразного напряжения, второй выход формирователя управляющих импульсов с выходом второго элемента совпадения, соединенный также с входом второго симметричного триггера, и имеющего первый и второй входы, соединенные соответственно через второй вход формирователя управляющих импульсов с выходом первого датчика азимутальных меток и с первым выходом первого симметричного триггера, имеющего второй выход, соединенный через усилитель, третий выход формирователя управляющих импульсов с входом электрооптического отклоняющего устройства, связанным по оптическому входу с оптическим выходом лазерного передатчика и по первому и второму оптическим выходам соответственно с первым оптическим входом первого колеблющегося зеркала и с оптическим входом отражательного зеркала, оптический выход которого связан с оптическим входом облучателя.
На фиг.1 приведена схема оптического локатора (1 привод; 2 датчик азимутальных меток; 3 привод обратного вращения; 4 датчик азимутальных меток; 5 генератор спадающего пилообразного напряжения; 6 генератор нарастающего пилообразного напряжения; 7 призма; 8 лазерный приемник; 9 - призма; 10 лазерный приемник; 11 двухлучевой индикатор с линейными развертками; 12 блок обработки; 13 колеблющееся зеркало; 14 вал; 15 - колеблющееся зеркало; 16 вал; 17 кулачковый механизм; 18 вал; 19 - привод; 20 электрооптическое отклоняющее устройство; 21 отражательное зеркало; 22 облучатель; 23 лазерный передатчик; 24 формирователь управляющих импульсов; 25 усилитель; 26 симметричный триггер; 27 и 28 - элементы совпадения; 29 симметричный триггер).
Привод обратного вращения 3 жестко связан с призмой 9 и с датчиком азимутальных меток 4, имеющим выход, соединенный через первый вход формирователя управляющих импульсов 24 с первым входом элемента совпадения 27, имеющего второй вход и выход соответственно соединенные с выходом симметричного триггера 29 и с входом симметричного триггера 26, а также через первый выход формирователя управляющих импульсов 24, генератор спадающего пилообразного напряжения 5 с первым входом двухлучевого индикатора с линейной разверткой 11, имеющего оптическую связь с блоком обработки 12 и второй, третий и четвертый входы соответственно соединенные с выходом лазерного приемника 8, с выходом лазерного приемника 10 и через генератор нарастающего пилообразного напряжения 6, второй выход формирователя управляющих импульсов 24 с выходом элемента совпадения 28, соединенным также с входом симметричного триггера 29 и имеющего первый и второй входы, соединенные соответственно через второй вход формирователя управляющих импульсов 24 с выходом датчика азимутальных меток 2 и с первым выходом симметричного триггера 26, имеющего второй выход, соединенный через усилитель, третий выход формирователя управляющих импульсов 24 с входом электрооптического отклоняющего устройства 20, соединенным по оптическому входу с оптическим выходом лазерного передатчика 23 и соединенным по первому и второму оптическим выходам соответственно с первым оптическим входом колеблющегося зеркала 13 и с оптическим входом отражательного зеркала 21, оптический выход которого связан с оптическим входом облучателя 22, имеющим оптический выход, связанный с первым оптическим входом колеблющегося зеркала 15, жестко связанного через вал 16, кулачковый механизм 17, вал 18 с приводом 19 и жестко связанного через вал 14 с колеблющимся зеркалом 13, второй оптический вход и первый оптический выход которого соответственно связаны с оптическим выходом и оптическим входом призмы 7, жестко связанной с приводом 1, имеющим жесткую связь с датчиком азимутальных меток 2, а второй оптический выход колеблющегося зеркала 13 связан с оптическим входом лазерного приемника 8, кроме того, второй оптический вход и первый оптический выход колеблющегося зеркала 15 связан соответственно с оптическим входом и оптическим выходом призмы 9, а второй оптический выход колеблющегося зеркала 15 соединен с оптическим входом приемника 10.
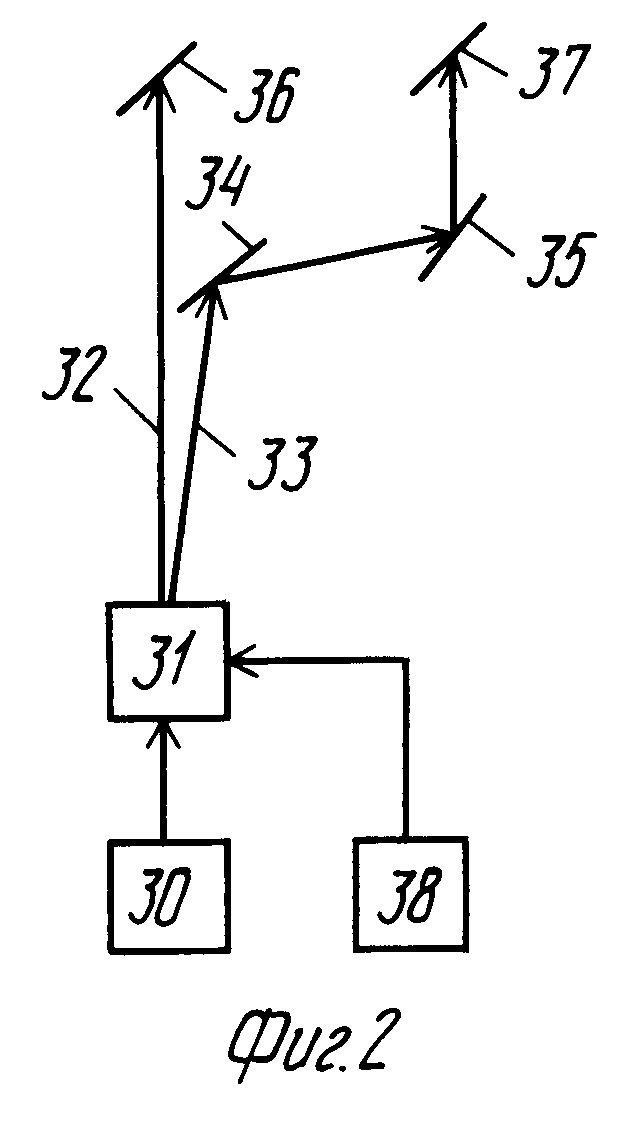
Работа устройства осуществляется следующим образом (фиг.2).
Лазерный передатчик 23 формирует непрерывный одночастотный лазерный луч, который проходит через электрооптическое отклоняющее устройство 20, к колеблющемуся зеркалу 13. В момент поступления управляющего напряжения с формирователя управляющих импульсов 24 на вход электрооптического отклоняющего устройства осуществляется отклонение луча, например на 5o. При этом луч далее отражается от отражательного зеркала 21, от облучателя 22 и поступает к колеблющемуся зеркалу 15 так, как показано на фиг.2 (где 30 лазерный передатчик; 31 электрооптическое отклоняющее устройство; 32 прямой луч; 33 отклоненный луч; 34 отражательное зеркало; 35 облучатель; 36, 37 - колеблющиеся зеркала; 38 формирователь управляющих импульсов).
Из фиг.2 видно, что лучи 34 и 35 на колеблющиеся зеркала 36 и 37 поступают параллельно друг другу. Однако колеблющееся зеркало 15 повернуто по углу места по часовой стрелке относительно колеблющегося зеркала 13 на угловую величину, равную смещению кадровой развертки за время одной строки. Например, при ширине луча 10' это смещение может составлять 2'. При этом обеспечивается равное количество отраженной световой энергии на одних и тех же строках при сканировании, что необходимо для дальнейшей обработки.
Сканирование осуществляется следующим образом.
Вращающийся привод 19 механически связан через вал 18 с кулачковым механизмом 17, который через вал 16 также механически связан с колеблющимся зеркалом 15, колебание которого осуществляется благодаря наличию кулачкового механизма 17. В свою очередь колеблющееся зеркало 15 через вал 14 жестко связано с колеблющимся зеркалом 13. С колеблющихся зеркал 13 и 15, осуществляющих развертку по кадру, лазерные лучи поступают соответственно на вращающиеся призмы 7 и 9, осуществляющие развертку лазерных лучей по строкам. Вращение призмы 7 осуществляется с помощью привода 1 в прямом направлении, а призмы 9 с помощью привода обратного вращения 13 в обратном направлении. Скорости вращения призм равны. Количество кадров в секунду зависит от скорости вращения вала 18, механически связанного с приводом 19. Например, при четырех кадрах в секунду скорость вращения вала 18 должна составлять 240 об/мин. Таким образом, осуществляется формирование двух оптико-механических разверток по кадру и строкам. С приводами 1 и 3 жестко связаны соответствующие датчики азимутальных меток 2 и 4. Они работают аналогично датчикам азимутальных меток, используемых в радиолокации. Разница заключается в том, что количество меток равно числу граней призмы. Момент выдачи азимутальной метки совпадает с началом строки. С датчиков 2 и 4 азимутальные метки поступают соответственно на входы элементов совпадения 27 и 28, которые при наличии разрешений с соответствующих симметричных триггеров 29 и 26 при их исходном положении, выдают импульсы об установке этих триггеров в единичное состояние. Таким образом, когда один из симметричных триггеров находится в нулевом (исходном) состоянии, другой находится в единичном состоянии. Сигналы с симметричного триггера 26 при нахождении его в единичном состоянии через усилитель 25 поступают на вход электрооптического отклоняющего устройства 20. Усилитель 25 усиливает сигналы до напряжения, достаточного для срабатывания электрооптического отклоняющего устройства. В связи с этим сканирование луча в прямом и обратном направлениях происходит в разное время. Кроме того, с выходов элементов совпадения 27 и 28 импульсы поступают соответственно на запуск генератора спадающего пилообразного напряжения 5 и на запуск генератора нарастающего пилообразного напряжения 6.
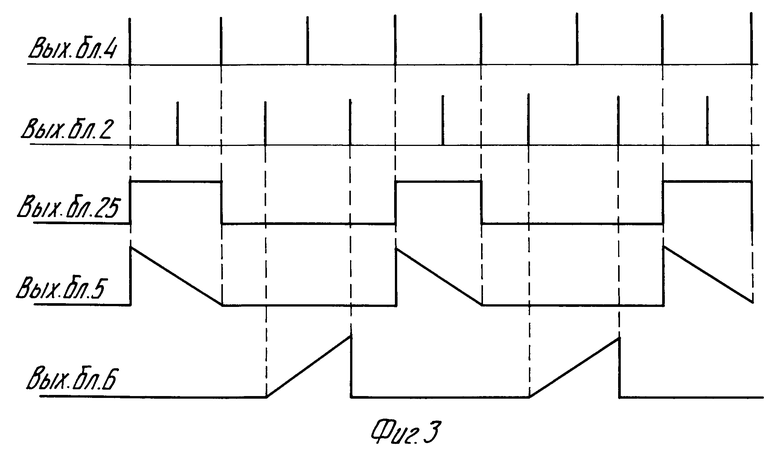
На фиг. 3 представлена временная диаграмма, поясняющая формирование пилообразных напряжений. Эти пилообразные напряжения поступают на запуск соответствующих линейных разверток двухлучевого индикатора с линейными развертками 11. Один луч движется в прямом направлении, а другой в обратном с равными скоростями и синхронно с движением строк. Время движения каждого из лучей равно времени строки. Лучи совмещены в одну линию. В лазерных приемниках 8 и 10 осуществляется преобразование отраженной световой энергии от объектов в электрические сигналы, которые поступают в индикатор 11 для отображения. В результате сигналы 38 и 39 от одного и того же объекта в процессе сканирования в прямом и обратном направлении будут разнесены так, как показано на фиг.4, где α направление; Д дальность. Дальность и направление определяются в блоке обработки 12 также, как в описании аналога (патент N 2010264) по формулам
Д т п и 
где т и п характеризуют временные рассогласования между началом строки и соответствующими сигналами.
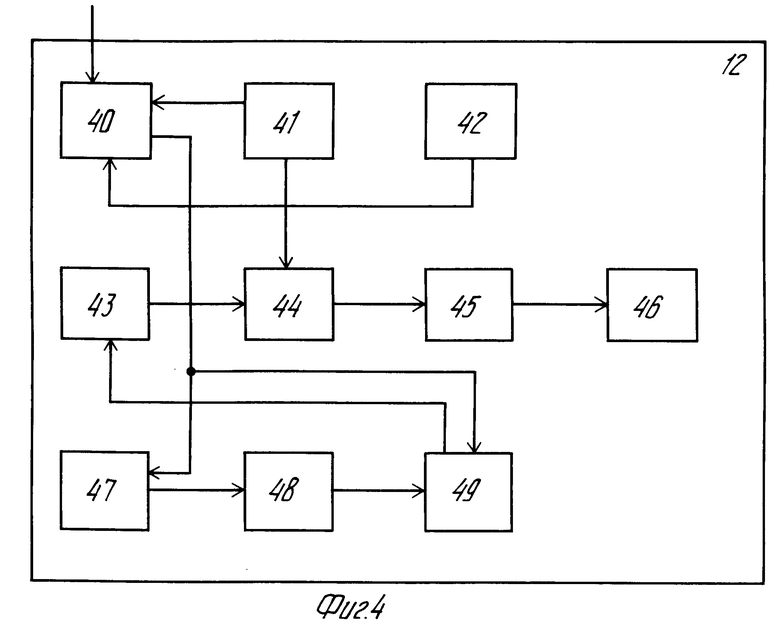
Блок определения дальности и направления работает следующим образом (фиг.4).
С помощью телевизионного датчика 40, встроенного в индикатор 11, осуществляется автоматический съем отображений с экрана индикатора, имеющего послесвечение и преобразование световых сигналов от этих отображений в электрические сигналы. Телевизионная развертка осуществляется по строкам с помощью генератора строк 41 и по кадру с помощью генератора 42. Линия задержки 47 задерживает сигналы на время, равное нескольким строкам. При отсутствии же сигналов в текущий момент времени на выходе инвертора 48 присутствует положительный сигнал, который поступает на первый вход схемы совпадения 49 одновременно с сигналом, поступающим на второй его вход с телевизионного датчика 40. Этим и обеспечивается автоматическое выделение других пар сигналов, имеющих другие сходственные амплитуды, т.е. выделение других объектов, амплитуды сигналов от которых отличаются. С выхода схемы совпадения сигналы, проходя через селектор 43, который выделяет сигналы, длительность которых не превышает определенной величины, поступают в блок определения временных интервалов между сигналами и началом строки. В этот блок также поступает синхроимпульс начала строки с генератора строк. Далее в блоке определения дальности и направления 44 определяются дальность и направление по формулам
Д т п и  .
.
Информация о дальности и направлении высвечивается в индикаторе 46.
Пусть осуществляется сканирование в зоне 60•30o при ширине луча 10', количестве строк 150, углу поля зрения лазерных приемников 5o, максимальной дальности обнаружения 15 км. При этих условиях время обзора будет составлять 250 мс, что соответствует частоте кадров, равной 4 Гц.
Устройство может быть использовано в системах управления воздушным движением в процессе многоцелевого сопровождения в ближней зоне, для предупреждения столкновений и в системах контроля посадки летательных средств, а также для обнаружения низколетящих объектов, в том числе и малоразмерных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028645C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 2001 |
|
RU2209390C2 |
| РАДИОЛОКАТОР | 1995 |
|
RU2096806C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2010264C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 2003 |
|
RU2247317C1 |
| УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ | 1999 |
|
RU2162234C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1991 |
|
RU2031362C1 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ | 1998 |
|
RU2164004C2 |
Оптический локатор обеспечивает уменьшение громоздкости без уменьшения скорости обзора благодаря введению в качестве второго привода привода обратного вращения, второго датчика азимутальных меток, генератора нарастающего пилообразного напряжения, генератора спадающего пилообразного напряжения, электрооптического отклоняющего устройства, отражательного зеркала, двухлучевого индикатора с линейной разверткой, блока обработки и формирователя управляющих импульсов, состоящего из двух элементов совпадения двух симметричных триггеров и усилителя, при этом привод обратного вращения жестко связан со второй призмой и со вторым датчиком азимутальных меток, имеющим выход, соединенный через первый вход формирователя управляющих импульсов с первым входом первого элемента совпадения, имеющего второй вход и выход, соответственно соединенные с выходом второго симметричного триггера и с входом первого симметричного триггера, а также через первый выход формирователя управляющих импульсов, генератор спадающего пилообразного напряжения с первым входом двухлучевого индикатора с линейной разверткой, имеющего оптическую связь с блоком обработки и второй, третий и четвертый входы, соответственно соединенные с выходом первого лазерного приемника, с выходом второго лазерного приемника и через генератор нарастающего пилообразного напряжения, второй выход формирователя управляющих импульсов с выходом второго элемента совпадения, соединенный также с входом второго симметричного триггера, и имеющего первый и второй входы, соединенные соответственно; через второй вход формирователя управляющих импульсов с выходом первого датчика азимутальных меток и с первым выходом первого симметричного триггера, имеющего второй выход, соединенный через усилитель, третий выход формирователя управляющих импульсов с входом электрооптического отклоняющего устройства, связанным по оптическому входу с оптическим выходом лазерного передатчика и связанным по первому и второму оптическим выходам соответственно с первым оптическим входом первого колеблющегося зеркала и с оптическим входом отражательного зеркала, оптический выход которого связан с оптическим входом облучателя. 4 ил.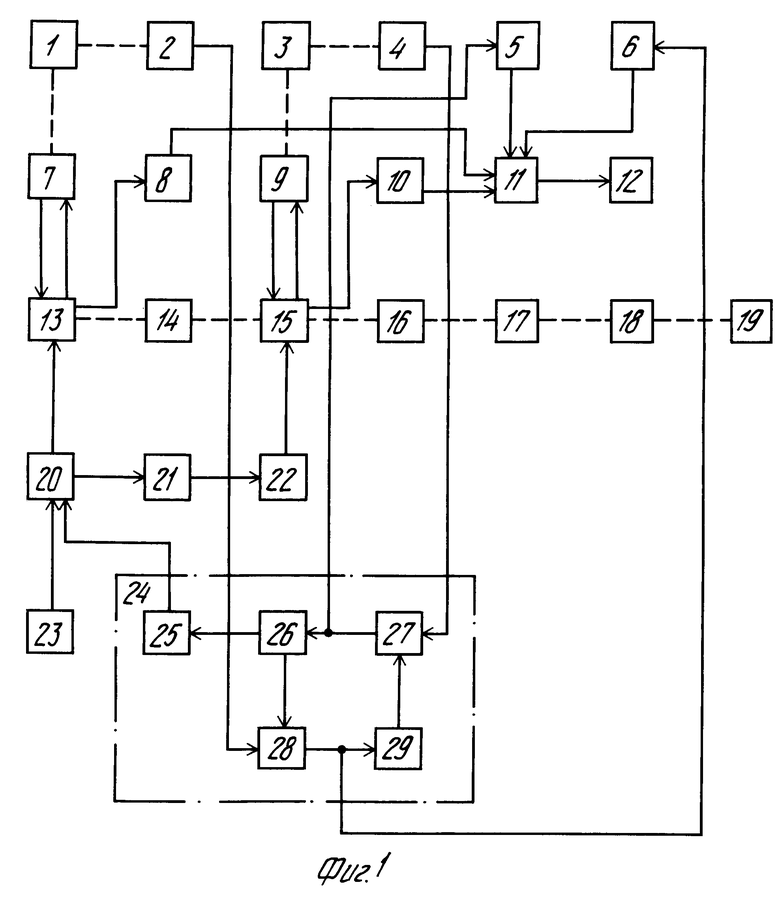
Оптический локатор, состоящий из трех приводов, датчика азимутальных меток, двух лазерных приемников, двух призм, двух колеблющихся зеркал, трех валов, кулачкового механизма, облучателя, лазерного передатчика, где второе колеблющееся зеркало жестко связано через второй вал, кулачковый механизм, первый вал с первым приводом и жестко связано через третий вал с первым колеблющимся зеркалом, второй оптический вход, а также первый и второй оптические выходы которого соответственно связаны с оптическим выходом первой призмы, оптическим входом первой призмы и оптическим входом первого лазерного приемника, а первый и второй оптические входы, а также первый и второй оптические выходы второго колеблющегося зеркала соответственно связаны с оптическим выходом облучателя, оптическим выходом второй призмы, оптическим входом второй призмы и оптическим входом второго лазерного приемника, а вторая и первая призмы имеют жесткие связи с вторым и третьим приводами, жестко связанными с датчиком азимутальных меток, отличающийся тем, что вводится в качестве второго привода привод обратного вращения, второй датчик азимутальных меток, генератор нарастающего пилообразного напряжения, генератор спадающего пилообразного напряжения, электрооптическое отклоняющее устройство, отражательное зеркало, двухлучевой индикатор с линейной разверткой, блок обработки и формирователь управляющих импульсов, состоящий из двух элементов совпадения, двух симметричных триггеров и усилителя, при этом привод обратного вращения жестко связан с вторым датчиком азимутальных меток, имеющим выход, соединенный через первый вход формирователя управляющих импульсов с первым входом первого элемента совпадения, имеющего второй вход и выход, соответственно соединенные с выходом второго симметричного триггера и входом первого симметричного триггера, а также через первый выход формирователя управляющих импульсов, генератор спадающего пилообразного напряжения с первым входом двухлучевого индикатора с линейной разверткой, имеющего оптическую связь с блоком обработки и второй, третий и четвертый входы, соответственно соединенные с выходом первого лазерного приемника, с выходом второго лазерного приемника и через генератор нарастающего пилообразного напряжения, второй выход формирователя управляющих импульсов с выходом второго элемента совпадения, соединенного также с входом второго симметричного триггера и имеющего первый и второй входы, соединенные соответственно через второй вход формирователя управляющих импульсов с выходом первого датчика азимутальных меток и первым выходом первого симметричного триггера, имеющего второй выход, соединенный через усилитель, третий выход формирователя управляющих импульсов с входом электрооптического отклоняющего устройства, связанного по оптическому входу с оптическим выходом лазерного передатчика и связанного по первому и второму оптическим выходами соответственно с первым оптическим входом первого колеблющегося зеркала и оптическим входом отражательного зеркала, оптический выход которого связан с оптическим входом облучателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, патент, 2028645, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, патент, 2010264, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
