Изобретение относится к способам определения местоположения и состояния (далее, радиомониторинга) объектов с использованием радиоканальных систем локального позиционирования. Как правило, объектами радиомониторинга являются транспортные средства (ТС), объекты недвижимости, люди и животные, а задача радиомониторинга решается с целью их централизованной охраны.
В последние годы широкое распространение получили способы радиомониторинга с использованием "прыгающих несущих частот" (FH - frequency hopping), предусматривающие передачу дискретной информации hopping-сообщениями с псевдослучайной перестройкой несущей частоты, благодаря чему обеспечивается возможность работы в сложной помеховой обстановке (RU №2231458, В60R 25/00; RU №2244642, В60R 25/00; RU №2258618, В60R 25/00; RU №2264937, В60R 25/00; RU №2265250, G08B 25/08; RU №2244959, В60R 25/10; US №6188715, Н04L 27/26; US №6700920, Н04В 1/713; DE №4337211, G08B 25/10).
Недостатки указанных технических решений связаны с использованием изменений (прыганий) только по диапазону несущей частоты. Это обусловливает взаимные помехи от наложения hopping-сообщений друг на друга. Низкая помехоустойчивость радиосвязи предопределяет нарушение достоверности передаваемой информации и возможность воспрепятствования передаче сообщений злоумышленниками.
Указанный недостаток устранен в способе передачи сообщений с охраняемых объектов по патенту US №6870875, Н04В 1/69. В этом способе используются hopping-соорбщения с изменениями, устанавливаемыми случайным числом не только по несущей частоте, но и по времени. В дальнейшем совокупность текущего значения несущей частоты и положения сигнала определенного передатчика на временной оси в пакете hopping-сообщения будем называть позицией по частоте и времени.
Согласно указанному способу передатчики, установленные на охраняемых объектах, работают синхронно, излучая общие, объединенные пакеты hopping-сообщений со скачкообразно изменяющимися позициями по частоте и времени, причем каждому передатчику отводится строго определенная позиция по частоте и времени, выбираемая в пакете hopping-сообщения с помощью алгоритма псевдослучайного выбора, известного в центре охраны. Указанные пакеты hopping-сообщений обрабатывают для извлечения из них сигналов от каждого из передатчиков. В продолжение любой из позиций пакета по времени приемник в центре охраны последовательно перестраивается на прием каждой из позиций по частоте. Отсутствие сигнала по любой из позиций по частоте и времени обозначает тревожное сообщение от передатчика, сигнал которого должен был занимать в пакете данную позицию по частоте и времени.
Недостатком указанного способа является сложность его практической реализации, поскольку для передатчиков всех охраняемых объектов устанавливается единая синхронизирующая связь. В рамках указанного способа считается, что эту связь невозможно нарушить, а сигналы синхронизации всегда принимаются безошибочно. Обеспечить такую синхронизацию достаточно сложно.
Кроме того, описанный выше способ не может быть отнесен к общим способам радиомониторинга, поскольку единая синхронизирующая связь может быть реализована только для объектов недвижимости, а это весьма частный случай радиомониторинга.
Поэтому в качестве наиболее близкого аналога (прототипа) настоящего изобретения выбран один из известных способов радиомониторинга и сопровождения наземных ТС по патенту RU №2288509, G08В 25/10, G08G 1/13. Согласно указанному известному способу с помощью радиомаяков, установленных на объектах радиомониторинга, периодически излучают в радиоэфир сигналы, несущие кодовые сообщения, содержащие МАРКЕР, АДРЕС, ИНФОРМАЦИЮ и КОНТРОЛЬНУЮ СУММУ, принимают указанные сигналы сетью территориально распределенных базовых станций, на каждой базовой станции осуществляют первичную обработку принятых кодовых сообщений, при которой демодулируют принятый сигнал, а полученную в результате первичной обработки информацию передают в центр сбора и обработки информации, где осуществляют вторичную обработку информации, полученной с базовых станций.
При реализации известного способа в бортовой аппаратуре осуществляется переключение передачи через терминал стандартной коммерческой сотовой сети подвижной связи и через терминал специализированной ретрансляционно-радиопеленгационной сети. Бортовая аппаратура рассчитана также и на прием команд. В общем, основным недостатком известного способа является сложность аппаратурной реализации бортовой аппаратуры, совершенно излишняя при выполнении задач радиомониторинга. К тому же, в известном способе каждый объект радиомониторинга должен быть "прописан" в сотовой сети подвижной связи и за него необходимо платить оператору сотовой связи по установленному им тарифному плану. Вследствие этого, при очень большом (десятки тысяч) количестве объектов радиомониторинга, обслуживаемых центром сбора и обработки информации, данный способ становиться практически нереализуемым из-за финансовых ограничений.
Кроме того, сотовая сеть подвижной связи может быть подавлена помехами, причем при относительно небольших затратах со стороны злоумышленников.
Настоящее изобретение направлено на устранение указанных недостатков прототипа. С этой целью в системе, реализующей предлагаемый способ радиомониторинга, предлагается использовать псевдослучайный алгоритм скачков частоты, сверхузкополосные каналы связи и цифровую обработку hopping-сообщений на базовых станциях. Все это позволяет обеспечить при передаче hopping-сообщений надежную защиту от естественных и преднамеренных помех.
Предметом изобретения является способ радиомониторинга ТС, объектов недвижимости, людей и животных, при котором с помощью радиомаяков, установленных на объектах радиомониторинга, которыми могут быть ТС, объекты недвижимости, люди и животные, периодически излучают в радиоэфир сигналы, несущие кодовые сообщения, содержащие МАРКЕР, АДРЕС, ИНФОРМАЦИЮ и КОНТРОЛЬНУЮ СУММУ, принимают указанные сигналы сетью территориально распределенных базовых станций, на каждой базовой станции осуществляют первичную обработку принятых кодовых сообщений, при которой демодулируют принятый сигнал, полученную в результате первичной обработки информацию передают в центр сбора и обработки информации, где осуществляют вторичную обработку информации, полученной с базовых станций, - при этом сигналы, излучаемые радиомаяками, формируют в виде hopping-сообщений, представляющих собой последовательности радиоимпульсов постоянной продолжительности Т со скачкообразно изменяющимися перед передачей каждого сообщения частотой радиоимпульса и интервалом между концом и началом следующих друг за другом радиоимпульсов, устанавливаемыми с помощью генератора случайных чисел, формирующего независимо от других радиомаяков два целых случайных числа m и n, которые могут меняться в установленных для каждого из них пределах, причем m определяет частоту Fm радиоимпульсов в данном сообщении: Fm=F0+ΔF(m-1), где F0 - минимальная частота (при m=1), ΔF - шаг сетки частот, а n - величину интервала ТИ(n) между радиоимпульсами: ТИ(n)=nT0, где Т0 - минимальный промежуток между радиоимпульсами (при n=1), перед передачей сообщения осуществляют амплитудную модуляцию радиоимпульсов символами сообщения, первичную обработку сигналов на базовой станции производят с помощью супергетерединного приемника, выполненного с возможностью снижения частоты радиоимпульсов в принимаемом сигнале, подвергают принятый сигнал аналого-цифровому преобразованию, с помощью быстрого преобразования Фурье (БПФ) анализируют его спектр на К сдвинутых по фазе интервалах анализа, продолжительность каждого из которых выбирают равной продолжительности Т, а сдвиг по фазе относительно соседнего интервала анализа выбирают кратным отношению Т/К, после чего при приеме МАРКЕРА текущего сообщения находят для текущего сообщения значение частоты радиоимпульсов и величину интервала между радиоимпульсами, по окончании приема МАРКЕРА, используя найденные значения частоты радиоимпульсов и величины интервала между радиоимпульсами, последовательно принимают АДРЕС, ИНФОРМАЦИЮ и КОНТРОЛЬНУЮ СУММУ текущего сообщения, подсчитывают код КОНТРОЛЬНОЙ СУММЫ и при его совпадении с принятой КОНТРОЛЬНОЙ СУММОЙ квалифицируют принятое сообщение как полученную в результате первичной обработки информацию.
Решению поставленной задачи способствуют частные существенные признаки предложенного способа.
При передаче кодового сообщения выбирают общее для всех объектов радиомониторинга целое число Q, которому должен быть кратна величина ТИ(n) интервала между радиоимпульсами: ТИ(n)=QnT/К.
При передаче АДРЕСА, ИНФОРМАЦИИ и КОНТРОЛЬНОЙ СУММЫ используют многопозиционную амплитудную модуляцию радиоимпульса.
При передаче АДРЕСА, ИНФОРМАЦИИ и КОНТРОЛЬНОЙ СУММЫ используют помехоустойчивое кодирование.
Задачей настоящего изобретения является создание такой технологии радиомониторинга ТС, объектов недвижимости, людей и животных, которая позволила бы снизить финансовые затраты, связанные с обеспечением связи и передачи сообщений в системе радиомониторинга, а также увеличить помехоустойчивость системы, реализующей данную технологию, и количество одновременно обслуживаемых ею объектов радиомониторинга.
Обеспечиваемый технический результат заключается в реализации метода передачи данных с помощью hopping-сообщений без применения при этом на объектах радиомониторинга средств взаимной синхронизации.
Суть изобретения поясняется на фиг.1 - фиг.4.
На фиг.1 приведена общая схема системы, реализующей предлагаемый способ радиомониторинга ТС, объектов недвижимости, людей и животных.
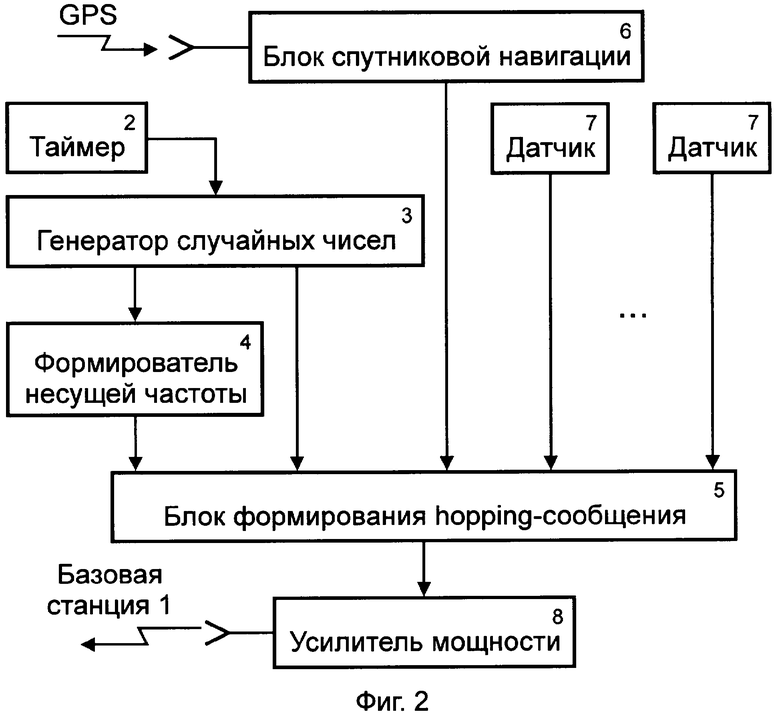
На фиг.2 представлена структурная схема радиомаяка.
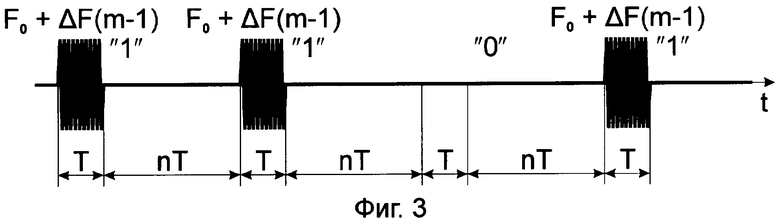
Фиг.3 иллюстрирует используемый метод передачи hopping-сообщений радиомаяка.
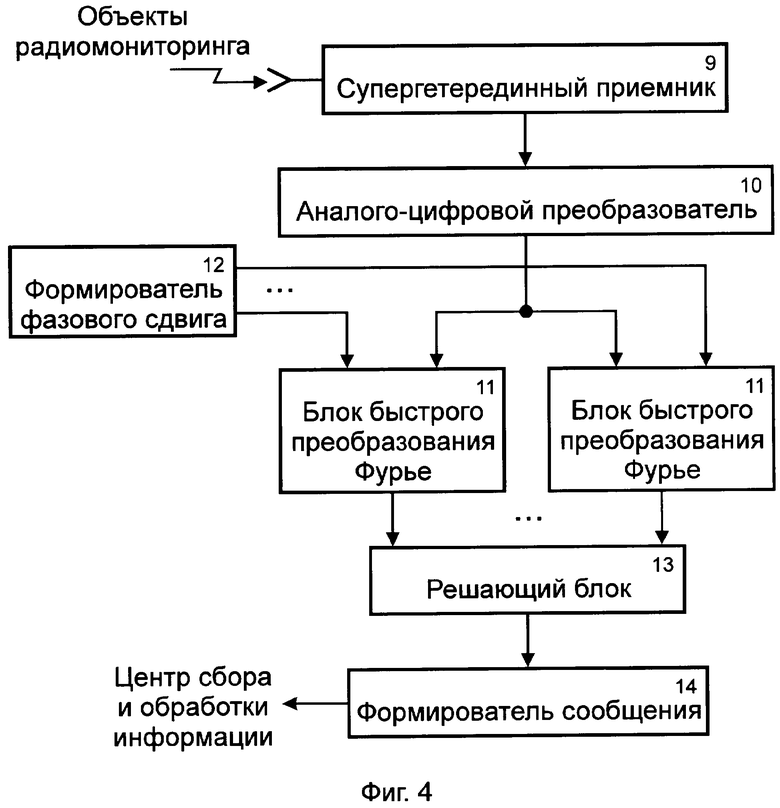
На фиг.4 представлена структурная схема базовой станции.
На фиг.1 - фиг.4 использованы следующие обозначения: 1 - базовая станция; 2 - таймер; 3 - генератор случайных чисел; 4 - формирователь несущей частоты; 5 - блок формирования hopping-сообщения; 6 - блок спутниковой навигации; 7 - датчик; 8 - усилитель мощности; 9 - супергетерединный приемник; 10 - аналого-цифровой преобразователь (АЦП); 11 - блок БПФ; 12 - формирователь фазового сдвига; 13 - решающий блок; 14 - формирователь сообщения.
Система, реализующая предлагаемый способ радиомониторинга ТС, объектов недвижимости, людей и животных (фиг.1), содержит радиомаяки, которые могут устанавливаться на ТС, на различных объектах недвижимости (в квартирах, офисах и других аналогичных объектах), переноситься людьми и животными (как домашними, так и дикими). В состав системы входят также территориально распределенные базовые станции 1 и центр сбора и обработки информации. Радиомаяки (фиг.2) выполнены с возможностью передачи hopping-сообщений на базовые станции 1, а базовые станции 1 - с возможностью приема этих hopping-сообщений, их первичной обработки и передачи первично обработанных hopping-сообщений в центр сбора и обработки информации. Схематическая структура hopping-сообщения радиомаяка приведена на фиг.3.
В состав каждого радиомаяка (фиг.2) входит таймер 2, выход которого соединен со входом генератора 3 случайных чисел. Первый выход генератора 3 случайных чисел через формирователь 4 несущей частоты подключен к первому входу блока 5 формирования hopping-сообщения, второй вход которого соединен со вторым выходом генератора 3 случайных чисел. В состав радиомаяка, предназначенного для любых объектов радиомониторинга, кроме объектов недвижимости, входит блок 6 спутниковой навигации (например, GPS-приемник), предназначенный для определения координат объекта радиомониторинга. Выход блока 6 спутниковой навигации подключен к третьему входу блока 5 формирования hopping-сообщения. Все остальные входы блока 5 формирования hopping-сообщения (кроме вышеупомянутых первых трех) подключены к выходам датчиков 7, количество и номенклатура которых определяются видом объекта радиомониторинга, на котором установлен радиомаяк. Выход блока 5 формирования hopping-сообщения подключен к усилителю 8 мощности, выполненному с возможностью связи по радиоэфиру с базовыми станциями 1.
Базовые станции 1 располагаются на объектах городской или поселковой инфраструктуры (например, на столбах освещения). В состав каждой базовой станции 1 (фиг.4) входит супергетеродинный приемник 9, предназначенный для приема hopping-сообщений от радиомаяков. Супергетерединный приемник 9 выполнен с возможностью снижения несущей частоты принимаемых им сигналов. Выход супергетерединного приемника подключен ко входу АЦП 10, выход которого соединен с информационными входами блоков 11 БПФ. Вход управления каждого блока 11 БПФ подключен к соответствующему выходу формирователя 12 фазового сдвига, а выход каждого блока 11 БПФ соединен с соответствующим входом решающего блока 13. Выход решающего блока 13 подключен ко входу формирователя 14 сообщения, который предназначен для формирования и передачи сообщений в центр сбора и обработки информации.
Описанная выше система радиомониторинга была реализована в виде опытного образца на предприятии-заявителе. При этом генератор 3 случайных чисел был выполнен на шестнадцатиразрядных регистрах с "линейными" обратными связями. Такие генераторы 3 случайных чисел позволяют формировать шестнадцатиразрядные случайные числа, задающие 216 значений, например 210 значений по частоте и 26 - по времени. Полоса частот группового спектра - 48 кГц. Количество номинальных частот супергетерединного приемника 9 - 1024. Шаг сетки номинальных частот БПФ - около 48 Гц. Продолжительность интервала символа hopping-сообщения T - около 20 мс. Частотная нестабильность формирователя 4 несущей частоты составляет ±4 кГц в диапазоне температур от минус 40 до плюс 60°С. Самое быстрое изменение несущей частоты из-за относительной частотной погрешности несущей формирователя 4 несущей частоты не превышает в опытном образце 10 Гц за час. Область разрешенных для передачи номинальных частот с учетом нестабильности несущих частот - около 40 кГц.
Испытания опытного образца системы, реализующей предложенный способ, проведенные предприятием-заявителем, показали, что помехоустойчивая имитостойкая радиосвязь радиомаяков, установленных на объектах радиомониторинга, с базовой станцией 1 осуществляется при прямой видимости на расстояниях до 20 км при мощности излучения 1,0 мВт.
Таким образом, возможность практической реализации предложенного способа радиомониторинга ТС, объектов недвижимости, людей и животных не вызывает сомнений.
Система, реализующая рассматриваемый способ радиомониторинга ТС, объектов недвижимости, людей и животных, работает следующим образом.
На фиг.1 условно показано использование рассматриваемого способа. Объекты радиомониторинга снабжаются специальными радиомаяками, сигналы которых (hopping-сообщения) принимаются сетью базовых станций 1 (на фиг.1 показана только одна из базовых станций 1). Базовые станции 1 принимают hopping-сообщения от радиомаяков, осуществляют первичную обработку принятой информации, накапливают ее и пересылают в общий для всех базовых станций 1 центр сбора и обработки информации, где осуществляют вторичную обработку информации, полученной от базовых станций 1.
Допустим, если ТС какой-либо автобазы оснащено радиомаяком, то администрации автобазы достаточно обратиться в центр сбора и обработки информации, чтобы получить сведения, по какому именно маршруту двигалось какое-либо ТС, и не было ли отклонений от предписанного маршрута. Если радиомаяком снабжен ребенок, пошедший в лес собирать орехи и не вернувшийся вовремя, то этого ребенка будет легко найти, воспользовавшись сведениями из центра сбора и обработки информации. Можно будет найти и дикое животное, чтобы сфотографировать его или (при наличии лицензии) даже поохотиться. А как упрощаются поиски домашних животных, если они снабжены радиомаяками! Объектом радиомониторинга может быть и объект недвижимости (например, загородный жилой дом). В этом случае, обратившись в центр сбора и обработки информации, можно получить сведения о том, как выполняется программа, создающая иллюзию обитаемости дома:
включение и выключение света, радио, телевидения. А при срабатывании охранных датчиков этого дома - и обращаться в центр сбора и обработки информации не нужно, оператор сам свяжется с хозяином этого дома (например, позвонив по контактному номеру телефона), чтобы предупредить о срабатывании охранных датчиков и выяснить, не нужно ли обратиться в милицию.
В общем, радиомониторинг со сбором данных в центре сбора и обработки информации может найти широкое применение. Однако при этом должны выполняться определенные требования:
- желательно увеличивать число случайно выбираемых несущих частот, чтобы hopping-сообщения от радиомаяка было бы сложно заглушить (с целью, например, угнать табун лошадей, пасущихся в лугах на вольном выпасе);
- необходимо увеличивать допустимое расстояние между объектом радиомониторинга и базовой станцией 1, обеспечивающее надежный прием. Чем больше это расстояние, тем меньше требуется базовых станций 1 для рабочей территории;
- необходимо уменьшать среднюю потребляемую мощность радиомаяка. Чем меньше эта мощность, тем больший срок может работать радиомаяк без смены батарейки питания. Замена батарейки питания в радиомаяке у дикого животного представляет определенные сложности вплоть до тех пор, пока это животное не сбросит рога вместе с радиомаяком.
Итак, при работе радиомаяка таймер 2 периодически, спустя фиксированные интервалы времени запускает генератор 3 случайных чисел. Интервалы времени между выходными сигналами таймера 2 (как правило, не более 20 минут) устанавливаются при программировании радиомаяка и определяются в зависимости от объекта радиомониторинга, на котором предполагается устанавливать данный радиомаяк.
По сигналу таймера 2 генератор 3 случайных чисел формирует двоичный код Z случайного равномерно распределенного числа. При этом М разрядов из этого двоичного кода генератор 3 случайных чисел подает в формирователь 4 несущей частоты. То есть, на формирователь 4 несущей частоты поступает код m в пределах от 1 до 2M. По этому коду формирователь 4 несущей частоты формирует частоту Fm, значение которой можно определить по формуле:

где F0 - минимальная частота (при m=7);
ΔF - шаг сетки частот.
При этом для максимального значения Fm max частоты Fm справедлива формула:

На предприятии-заявителе выпущен в виде опытного образца формирователь 4 несущей частоты, который для подаваемого десятиразрядного кода 1≤m≤210 формирует частоты при F0≥433,05 МГц и ΔF=48 Гц.
Сформированная частота Fm поступает на первый вход блока 5 формирования hopping-сообщения. Оставшиеся N разрядов кода Z поступают на второй вход блока 5 формирования hopping-сообщения и образуют код n в пределах от 1 до 2N. Код n определяет форму сигнала при передаче hopping-сообщения данным радиомаяком. Промежуток времени, в течение которого формируется радиоимпульс с частотой Fm, всегда один и тот же (Т), но интервал времени ТИ(n) между этими радиоимпульсами определяется кодом n по формуле:

где Т0 - минимальный промежуток между радиоимпульсами (при n=1).
Величины Т и Т0 связаны для системы радиомониторинга, реализующей заявляемый способ, через соотношение, приведенное в формуле:

где Q и К - целые числа, постоянные для данной системы радиомониторинга.
При подстановке формулы (4) в формулу (3) получаем формулу:

В опытном образце системы радиомониторинга, выпущенной на предприятии-заявителе, было выбрано N=6, Q=K=4 и T=T0=20 мс.
На выходе блока 5 формирования hopping-сообщения формируется hopping-сообщение, предназначенное для передачи на базовую станцию 1. Логической единице в этом hopping-сообщении соответствует передача радиоимпульса с вышеуказанными параметрами, а логическому нулю - отсутствие такой передачи. На фиг.3 показано формирование четырех последовательно передаваемых разрядов  При этом принято, что Т0=T, а n=3. В блоке 5 формирования hopping-сообщения последовательно формируются разряды:
При этом принято, что Т0=T, а n=3. В блоке 5 формирования hopping-сообщения последовательно формируются разряды:
- МАРКЕРА, состоящего из строго определенного для данной системы радиомониторинга числа Р логических единиц и одного логического нуля. МАРКЕР используется для определения на базовой станции 1 параметров m и n hopping-сообщения;
- АДРЕСА, определяющего идентификационный код радиомаяка соответствующего объекта радиомониторинга;
- ИНФОРМАЦИИ, определяющей информационную часть hopping-сообщения;
- КОНТРОЛЬНОЙ СУММЫ, предназначенной для подтверждения на базовой станции 1 правильности принятого hopping-сообщения. КОНТРОЛЬНАЯ СУММА однозначно подсчитывается в зависимости от сформированных кодов АДРЕСА и ИНФОРМАЦИИ.
При необходимости, при передаче АДРЕСА, ИНФОРМАЦИИ и КОНТРОЛЬНОЙ СУММЫ может быть использовано помехозащищенное кодирование.
Частью ИНФОРМАЦИИ должны быть координаты объекта радиомониторинга (за исключением тех случаев, когда осуществляется радиомониторинг объектов недвижимости). Для определения координат объекта радиомониторинга используется установленный в радиомаяке блок 6 спутниковой навигации (например, GPS-приемник). Другой частью ИНФОРМАЦИИ являются показания датчиков 7, номенклатура и количество которых определяется назначением радиомаяка. Например, если объектом радиомониторинга является ТС, то датчики 7 должны быть датчиками охранно-противоугонной сигнализации, а если объектом радиомониторинга является животное, то важнейшим параметром является показание датчика 7, определяющего, живо ли это животное (например, по температуре тела).
Необходимо отметить, что hopping-сообщение, передаваемое радиомаяком, содержит достаточно большое количество разрядов (в опытном образце системы радиомониторинга, выпущенном на предприятии-заявителе, оно превышает 200). Поэтому продолжительность передачи hopping-сообщения может быть достаточно велика. Для сокращения времени передачи hopping-сообщения существует возможность использования многопозиционного кодирования амплитуды передаваемого радиоимпульса. Например, при использовании четырехпозиционного кодирования амплитуды время передачи АДРЕСА, ИНФОРМАЦИИ и КОНТРОЛЬНОЙ СУММЫ сокращается вдвое, поскольку один радиоимпульс сообщает сведения сразу о двух разрядах hopping-сообщения. Однако при выигрыше во времени передачи ухудшается помехозащищенность hopping-сообщения.
Hopping-сообщения на выходе блока 5 формирования hopping-сообщения усиливаются по мощности в усилителе 8 мощности и через радиоэфир поступают на одну или несколько базовых станций 1.
Hopping-сообщения от различных объектов радиомониторинга при этом не искажают друг друга. Искажение возможно только в том случае, когда одновременно передается МАРКЕР hopping-сообщения от двух различных объектов радиомониторинга, и в обоих hopping-сообщениях совпадают несущие частоты Fm. Покажем это при рассмотрении работы базовой станции 1.
В базовой станции 1 (фиг.4) hopping-сообщения принимает супергетерединный приемник 9. При этом происходит снижение несущей частоты сигналов в радиоимпульсе. То есть, область допустимых частот радиоимпульсов (полоса частот группового спектра) F0≤Fm≤Fm max на входе супергетерединного приемника 9 преобразуется в область его допустимых выходных частот (F0-f)≤F≤(Fm max-f). В опытном образце системы радиомониторинга, выпущенной на предприятии-заявителе, выбрано снижение максимально допустимой несущей частоты до значения (Fm max-f) не выше 20 кГц.
Принятое супергетерединным приемником 9 hopping-сообщение поступает на АЦП 10, где преобразуется в набор цифровых значений. Эти цифровые значения поступают на блоки 11 БПФ, выполняющие функцию цифровой узкополосной фильтрации с шагом ΔF и периодом интегрирования, равным Т. Однако по окончании интегрирования восстановить исходное hopping-сообщение, передаваемое радиомаяком, удается только в том случае, когда начало радиоимпульса в hopping-сообщении радиомаяка совпадает с началом периода интегрирования в БПФ на базовой станции 1. Добиться такого совпадения невозможно, поэтому выходные сигналы АЦП 10 подаются параллельно на К блоков 11 БПФ, в которых начало периода интегрирования в БПФ сдвинуто на время Т/К. Тогда хотя бы в одном из блоков 11 БПФ момент начала периода интегрирования в БПФ будет отличаться не более чем на ±0,5Т/К от начала радиоимпульса в hopping-сообщении радиомаяка. Сдвиг начала периода интегрирования в блоках 11 БПФ осуществляет формирователь 12 фазового сдвига. Если на базовую станцию 1 поступает hopping-сообщение с одного из радиомаяков, то за время приема МАРКЕРА хотя бы в одном из блоков 11 БПФ будут правильно определены значения несущей частоты Fm и интервала ТИ(n) между радиоимпульсами для принимаемого hopping-сообщения. После этого начинается этап сопровождения МАРКЕРА принимаемого hopping-сообщения.
Если на базовую станцию 1 одновременно поступают hopping-сообщения от различных объектов радиомониторинга, то при несовпадении в них несущей частоты Fm блоки 11 БПФ разделят все одновременно поступившие hopping-сообщения (как относящиеся к различным шагам узкополосной фильтрации). Если же по окончании приема МАРКЕРА одного hopping-сообщения начинает поступать hopping-сообщение от другого объекта радиомониторинга на той же несущей частоте Fm, то радиоимпульсы сопровождаемого hopping-сообщения будут исключаться из общей последовательности радиоимпульсов на несущей частоте Fm, и можно выделять МАРКЕР в следующем hopping-сообщении. Поскольку при БПФ осуществляется интегрирование за достаточно большой промежуток времени Т, короткие случайные помехи в принимаемом hopping-сообщении не должны сказываться на качестве приема hopping-сообщения. Это позволяет осуществлять передачу hopping-сообщений на большие расстояния при малой мощности выходного сигнала радиомаяка.
В опытном образце системы радиомониторинга, выпущенной на предприятии-заявителе, при мощности излучения радиомаяка не более 1,0 мВт обеспечивается передача hopping-сообщения на расстояние до 20 км (при прямой видимости).
Окончание МАРКЕРА определяется в соответствующем блоке 11 БПФ по приему в hopping-сообщении логического нуля. Далее соответствующий блок 11 БПФ осуществляет последовательную передачу в решающий блок 13 разрядов АДРЕСА, ИНФОРМАЦИИ и КОНТРОЛЬНОЙ СУММЫ сопровождаемого hopping-сообщения. Решающий блок 13 по принимаемым кодам АДРЕСА и ИНФОРМАЦИИ рассчитывает КОНТРОЛЬНУЮ СУММУ и сравнивает ее с принятым в составе сопровождаемого hopping-сообщения кодом КОНТРОЛЬНОЙ СУММЫ. При совпадении этих величин принятое hopping-сообщение считается достоверным. Далее, решающий блок 13 проверяет, не принималось ли одновременно с данным hopping-сообщением совпадающее с ним hopping-сообщение от другого блока 11 БПФ. При наличии такого совпадения решающий блок 13 игнорирует все совпадающие hopping-сообщения, оставляя только одно. Это hopping-сообщение передается в формирователь 14 сообщения, где формируется и преобразуется к виду выходного сообщения определенной базовой станции 1 (например, дополняется номером этой базовой станции 1, а также указанием текущего времени приема hopping-сообщениея и пеленгом на объект радиомониторинга) и передается в центр сбора и обработки информации.
Таким образом, в центр сбора и обработки информации поступают выходные сообщения базовых станций 1 всей системы радиомониторинга. Методика передачи выходных сообщений базовых станций 1 в центр сбора и обработки информации, а также методика обработки полученных выходных сообщений в центре сбора и обработки информации могут быть различными, и это не относится к задачам настоящего изобретения. Кроме того, необходимо учитывать, что в центр сбора и обработки информации поступают сообщения по радиомониторингу объектов принципиально различных классов. Радиомониторинг дикого животного должен существенно отличаться от радиомониторинга ТС или объекта недвижимости, что также не относится к задачам настоящего изобретения.
Приведенный выше пример системы радиомониторинга, реализаующей заявленный способ радиомониторинга, показывает, что решение задачи настоящего изобретения практически возможно - может быть создана технология радиомониторинга ТС, объектов недвижимости, людей и животных, которая позволит снизить финансовые затраты, связанные с обеспечением связи и передачи данных в системе радиомониторинга, и при этом обеспечить достаточно высокую помехоустойчивость и пропускную способность системы радиомониторинга.
Обеспечиваемый технический результат заключается в реализации связи и передачи данных с помощью hopping-сообщений без применения при этом приемопередающих средств обмена данными и взаимной синхронизации обслуживаемых объектов радиомониторинга, что позволит существенно упростить практическую реализацию предлагаемого способа радиомониторинга.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОСИГНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, ОБЪЕКТОВ НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2231458C1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2007 |
|
RU2342264C1 |
| БЕСПРОВОДНАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБСЛУЖИВАНИЯ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2009 |
|
RU2395120C1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2005 |
|
RU2269437C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ПРИ ОХРАНЕ ГРУППЫ ОБЪЕКТОВ | 2004 |
|
RU2265250C1 |
| СПОСОБ РАДИОСВЯЗИ ОХРАНЯЕМЫХ ОБЪЕКТОВ И ЦЕНТРА ОХРАНЫ | 2006 |
|
RU2295778C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| СИСТЕМА ДЛЯ МОНИТОРИНГА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2007 |
|
RU2337406C1 |
| СИСТЕМА ЭЛЕКТРОННОГО УЧЕТА РАСХОДА ЭНЕРГОНОСИТЕЛЕЙ | 2007 |
|
RU2340096C1 |

Изобретение относится к технике радиомониторинга и централизованной охраны транспортных средств, объектов недвижимости, людей и животных с использованием радиоканальных систем локального позиционирования. Радиомаяками, установленными на объектах радиомониторинга, периодически излучают в радиоэфир сигналы с кодовыми сообщениями, содержащими МАРКЕР, АДРЕС, ИНФОРМАЦИЮ и КОНТРОЛЬНУЮ СУММУ. Указанные сигналы принимают базовыми станциями. На каждой из них осуществляют первичную обработку принятых сообщений, при которой демодулируют принятый сигнал. Полученную информацию передают в центр сбора и обработки информации, где осуществляют ее вторичную обработку. Сигналы радиомаяков формируют в виде hopping-сообщений, представляющих собой последовательности радиоимпульсов постоянной продолжительности со скачкообразно изменяющимися перед передачей каждого сообщения частотой радиоимпульса и интервалом между концом и началом следующих друг за другом радиоимпульсов, устанавливаемыми с помощью генератора случайных чисел. Перед передачей сообщения осуществляют амплитудную модуляцию радиоимпульсов символами сообщения. Первичную обработку сигналов на базовой станции производят с помощью супергетерединного приемника. Принятый сигнал подвергают аналого-цифровому преобразованию, с помощью быстрого преобразования Фурье анализируют его спектр на сдвинутых по фазе интервалах анализа. При приеме МАРКЕРА текущего сообщения находят для сообщения значение частоты радиоимпульсов и величину интервала между радиоимпульсами. По окончании приема МАРКЕРА, используя найденные значения частоты радиоимпульсов и величины интервала между радиоимпульсами, последовательно принимают АДРЕС, ИНФОРМАЦИЮ и КОНТРОЛЬНУЮ СУММУ сообщения и подсчитывают код КОНТРОЛЬНОЙ СУММЫ. При его совпадении с принятой КОНТРОЛЬНОЙ СУММОЙ квалифицируют принятое сообщение как полученную в результате первичной обработки информацию. Изобретение позволяет повысить защиту от естественных и преднамеренных помех при передаче hopping-сообщений. 3 з.п. ф-лы. 4 ил.
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| US 6870875 В1, 22.03.2005 | |||
| DE 4337211 С1, 15.12.1994 | |||
| РАДИОСИГНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, ОБЪЕКТОВ НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2231458C1 |

