Изобретение относится к радиоэлектронным охранным системам, обеспечивающим возможности поиска, обнаружения, определения текущего местоположения и перехвата угнанных транспортных средств (УТС) с помощью транспортных средств (ТС) быстрого реагирования.
Одной из первых примененных на практике систем этого класса является американская радиопоисковая система LO/JACK, предназначенная для поиска, обнаружения и перехвата УТС (см., например, Руководство по эксплуатации "Радиопоисковая система LO/JACK", Москва, 1998). В состав этой системы входят следующие основные узлы:
- приемоответчик VLU, скрытно устанавливаемый на ТС;
- несколько территориально разнесенных базисных станций, содержащих передатчик включения VAT и устанавливаемую на вышке антенну;
- устанавливаемый на милицейских ТС преследования трекер VTC - автомобильный компьютер слежения, включающий в себя четырехэлементную пеленгационную антенну с блоками обработки и отображения информации о дальности и пеленге приемоответчика VLU, находящегося на разыскиваемом ТС.
При установлении факта кражи или угона владельцем ТС или лицом, имеющим право пользования ТС (пользователем), он обращается с заявлением (письменно или по телефону) в центр оперативного реагирования системы LO/JACK или в дежурную часть милиции. Оператор системы активирует установленный на ТС приемоответчик VLU путем посылки ему кодового сообщения с установленной на вышке антенны передатчика включения VAT. Приемоответчик VLU включается и начинает посылать сигнал, по которому можно запеленговать УТС с милицейских ТС преследования, оснащенных трекерами VTC. После того, как какой-либо из трекеров VTC обнаруживает и пеленгует работающий приемоответчик VLU, начинается операция по преследованию и перехвату УТС ("капкан"). В ней участвуют несколько оборудованных трекерами VTC патрульных ТС специализированного подразделения милиции. Трекеры VTC пеленгуют источник излучения. Руководствуясь их показаниями и сведениями, получаемыми с помощью штатных радиостанций от других экипажей, патрульные ТС быстрого реагирования постепенно стягивают кольцо захвата УТС.
Недостатками описанной выше радиопоисковой системы являются:
1. Отсутствие начального "целеуказания" - в момент начала поиска УТС определение местоположения УТС осуществляется только с ТС быстрого реагирования в процессе перехвата. Это заставляет милицию содержать для указанной цели специализированное подразделение, неся при этом значительные эксплуатационные расходы, в то время как основные силы и средства милиции, базирующихся в дежурных частях, практически лишены возможности участвовать в операции по поиску и перехвату УТС.
2. Необходимость перехвата УТС в движении, что таит угрозу безопасности другим участникам дорожного движения и создает серьезные трудности правового характера в случае дорожно-транспортного происшествия.
3. Наличие на борту ТС быстрого реагирования специальных радиопеленгационных антенн, демаскирующих эти ТС.
Известна система мониторинга, информационного обслуживания и охраны ТС от несанкционированного воздействия по патенту RU №2155684, В 60 R 25/00, 10.09.2000, содержащая телефонную сеть связи и передачи данных, подключенную к пейджинговой сети связи, содержащей операторский блок передачи данных и установленные на ТС абонентские приемники, выполненные с возможностью активации иммобилайзеров и с возможностью запуска передатчиков маячкового типа при приеме по пейджинговой сети связи блокирующего и маячкового кодов, соответственно, а также территориально распределенные на улично-дорожной сети стационарные приемопередатчики, выполненные с возможностью приема сигналов тревоги от передатчика маячкового типа при попадании несущего его УТС в зону действия стационарного приемопередатчика и с возможностью передачи сообщений, по крайней мере, на одну из базовых станций, связанных с информационным центром, содержащим последовательно включенные блок приема и блок первичной обработки, выходы которого подключены соответственно к блоку регистрации и к блоку отображения, при этом стационарные приемопередатчики выполнены с возможностью пеленгации передатчиков маячкового типа и измерения мощности принимаемых от них сигналов, в информационный центр введены блок приема и обработки сообщений от внешних источников, блок передачи информационных сообщений, блок вторичной обработки, подключенный к выходам блока первичной обработки, блока регистрации, блока отображения и блока приема и обработки сообщений от внешних источников и выполненный с возможностью определения координат УТС по совокупности данных о местоположении стационарных приемопередатчиков, принявших от передатчиков маячкового типа сигналы тревоги, мощности которых превышают заданный уровень, и измеренным значениям мощностей принятых сигналов и пеленгов на них.
Недостатком данной системы является низкая точность определения координат УТС, которая обусловлена использованием амплитудного метода пеленгации УТС, дающего в городских условиях большие ошибки измерений.
В патенте RU №2179121, В 60 R 25/00, 10.02.2002 предложена система оперативного слежения за ТС, включающая приемник, передатчик и процессор для хранения кодированной информации об указанном ТС, установленные на последнем, и стационарные передатчики, установленные на улично-дорожной сети, при этом в качестве стационарных передатчиков используются маломощные передатчики с возможностью излучения индивидуального для каждого из них кодированного сигнала, а в качестве передатчика ТС используется передатчик действующей в регионе сотовой радиосвязи. При этом процессор программируется так, что он способен фиксировать поочередно индивидуальный код каждого из стационарных передатчиков, который содержит информацию о его местоположении, и передавать его вместе с кодированной информацией о ТС через сотовый передатчик на компьютер службы быстрого реагирования.
Данная система обладает более высокой точностью, чем вышеупомянутый аналог. Однако она уязвима по отношению к умышленным помехам стандартным сотовым сетям подвижной связи, которые может применить злоумышленник для лишения системы возможности передавать необходимую для определения координат УТС информацию с борта УТС.
Возможность использования злоумышленниками таких средств противодействия стала реальностью после поступления на коммерческий рынок малогабаритных джаммеров - постановщиков умышленных помех сотовым сетям подвижной связи. Так, согласно рекламной информации израильской фирмы NetLine, выпускаемый этой фирмой джаммер C-Guard LP способен блокировать сотовую связь для практически всех используемых в настоящее время стандартов:
- аналоговых: AMPS, N-AMPS, NMT, TACS;
- цифровых: GSM, CDMA, TDMA, iDEN, UMTS практически в любых частотных диапазонах.
При средней мощности излучения (5÷50) мВт и весе не более 0,6 кг это устройство обеспечивает эффективное блокирование абонентских терминалов стандартных сотовых сетей подвижной связи в радиусе (5÷80) м вокруг себя.
Кроме того, передача по коммерческой сотовой сети подвижной связи больших объемов информации требует значительных финансовых затрат.
От указанных недостатков свободна система, реализующая известный способ комплексной охраны подвижных и неподвижных объектов по патенту RU №2159190, В 60 R 25/00, 20.11.2000, согласно которому с помощью стационарных сигнализаторов, установленных на сооружениях городской инфраструктуры с известными географическими координатами, излучают кодовые посылки, несущие информацию о категории посылки, выраженной тестом, информационным сообщением или сигналом тревоги, и информацию о местоположении указанных сооружений, а с помощью абонентских сигнализаторов, установленных на подвижных или неподвижных охраняемых объектах, излучают кодовые посылки, несущие информацию о категории сообщения, коды идентификационных признаков подвижных и неподвижных объектов и коды принадлежности их соответствующим владельцам, принимают эти кодовые посылки на территориально разнесенных базисных станциях, осуществляют их предварительную обработку и передают в цифровом виде на центральную станцию, где с помощью первичной цифровой обработки определяют категорию принятого сообщения, идентификационные признаки объекта и географические координаты сигнализатора, излучающего данную кодовую посылку, а также расстояния от абонентского сигнализатора до ближайших к нему базисных станций. В случае несанкционированного воздействия на какой-либо из оборудованных абонентскими сигнализаторами подвижный или неподвижный объект и обнаружения в его кодовой посылке сигнала тревоги передают тревожное оповещение по пейджинговой сети связи на индивидуальный приемник владельца и на приемник абонентского сигнализатора, установленного на принадлежащем этому владельцу подвижном или неподвижном объекте, при этом часть стационарных сигнализаторов используют в качестве базисных станций. На центральной станции осуществляют дополнительную цифровую обработку первично обработанных кодовых посылок с использованием условно постоянной информации о местности, о расположении на ней различных городских сооружений и о транспортных потоках на улично-дорожной сети, получаемой от внешних информационных источников. Определяют местоположение подвижного объекта на местности, активируют по пейджинговой сети связи установленный на этом объекте иммобилайзер и блокируют с его помощью движение подвижного объекта, а после получения от его владельца подтверждения факта несанкционированного воздействия на принадлежащий ему подвижный объект формируют на центральной станции и передают по проводным или беспроводным каналам связи в ближайший к данному объекту центр оперативного реагирования голосовое сообщение и цифровые данные, несущие информацию о категории сигнала тревоги, об идентификационных признаках объекта, о местоположении данного объекта на местности и сведения о владельце, а в процессе реагирования на факт несанкционированного воздействия определяют с помощью носимых или возимых пеленгационных устройств, размещенных на подвижных средствах оперативного реагирования, полярные координаты данного объекта относительно носимых или возимых пеленгационных устройств и с их помощью уточняют ранее переданные с центральной станции данные о местоположении объекта на местности.
Указанная система выбрана в качестве прототипа изобретения.
Недостатком системы-прототипа является сложность ее наземной инфраструктуры, обусловленная тем, что для получения приемлемой точности определения начального местоположения УТС ("первичного целеуказания"), территория должна быть покрыта достаточно плотной сетью ретрансляционно-радиопеленгационных станций. Кроме того, в состав радиопоискового комплекта, установленного на борту ТС быстрого реагирования, входит, как и в вышеупомянутой системе LO/JACK, достаточно сложное радиопеленгационное устройство с внешними антеннами. По виду этих антенн злоумышленник может установить принадлежность данного ТС силам быстрого реагирования, осуществляющим перехват, и принять соответствующие меры противодействия.
Предметом настоящего изобретения является радиопоисковая система для перехвата УТС, содержащая установленный на борту УТС абонентский комплекс, который содержит последовательно соединенные абонентский приемник, выполненный с возможностью приема по радиоэфиру сигналов из сети подвижной связи, микроконтроллер, выполненный с возможностью приема извещений из блока охранных извещателей и передачи команд блокирования движения УТС на исполнительные устройства, и абонентский сигнализатор, выполненный с возможностью излучения на несущей частоте кодовых посылок, содержащих информацию о категории сообщения и коды идентификационных признаков ТС, на борту которого он установлен, и установленные на борту ТС быстрого реагирования радиопоисковые комплексы, каждый из которых содержит блок связи и передачи данных, подключенный к сети подвижной связи, блок хранения информации из внешних информационных источников, блок приема кодовых посылок и блок обработки, отображения и определения координат, связанный с персональным компьютером оператора радиопоискового комплекса и с блоком хранения информации из внешних информационных источников, при этом первый вход блока обработки, отображения и определения координат подключен к выходу блока приема кодовых посылок, а выход - ко входу блока связи и передачи данных, - при этом абонентский сигнализатор выполнен с возможностью излучения hopping-сигнала, несущего кодовые посылки, а в абонентский комплекс введен абонентский блок спутниковой навигации, выход которого подключен к дополнительному входу микроконтроллера, выполненного с возможностью преобразования данных спутниковой навигации в формат кодовой посылки, излучаемой абонентским сигнализатором, в каждый радиопоисковый комплекс введены блок спутниковой навигации и электронный магнитный компас, выходы которых подключены, соответственно, к первому и второму дополнительным входам блока обработки, отображения и определения координат, выполненного с возможностью решения навигационных уравнений по координатным данным, получаемым из блока приема кодовых посылок, блока спутниковой навигации и от электронного магнитного компаса, а блок приема кодовых посылок выполнен с возможностью приема по радиоэфиру hopping-сигнала, несущего кодовые посылки, селекции из кодовых посылок данных спутниковой навигации и преобразования их в формат, используемый в блоке обработки, отображения и определения координат.
Частными существенными признаками изобретения являются следующие.
Абонентский сигнализатор содержит блок управления, выполненный с возможностью подключения к микроконтроллеру, первый групповой выход блока управления соединен с первым групповым входом постоянного запоминающего устройства (ПЗУ), выход которого подключен к первому входу синтезатора, а дополнительный вход соединен с дополнительным выходом блока управления, второй выход которого подключен к первому входу амплитудного модулятора, а третий выход - ко входу генератора псевдослучайного кода, групповой выход которого соединен со вторым, групповым входом синтезатора, третий вход которого подключен к выходу опорного генератора, а выход - ко второму входу амплитудного модулятора, выход которого соединен со входом усилителя мощности, выполненного с возможностью излучения в радиоэфир hopping-сигнала с кодовыми посылками, несущими информацию о категории сообщения, коды идентификационных признаков УТС и данные спутниковой навигации.
Блок приема кодовых посылок содержит приемник, выполненный с возможностью приема по радиоэфиру hopping-сигналов, излучаемых абонентским сигнализатором, и переноса принятых сигналов в область более низких частот, аналого-цифровой преобразователь, вход которого подключен к выходу приемника, а выход - ко входам нескольких узкополосных каналов, каждый из которых содержит узкополосный фильтр и четыре коррелятора, вход каждого из которых подключен к выходу узкополосного фильтра, а выход - к соответствующему входу решающего блока, а также блок световой и звуковой сигнализации и блок анализа, вход которого подключен к выходу решающего блока, а первый выход - ко входу блока световой и звуковой сигнализации, а второй выход является выходом блока приема кодовых посылок.
Настоящее изобретение направлено на решение задачи создания радиопоисковой системы для перехвата УТС, которая обладала бы большей мобильностью, скрытностью и помехозащищенностью, чем у вышеупомянутых аналогов. Обеспечиваемый технический результат заключается в повышении точности определения относительного местоположения УТС и ТС быстрого реагирования, участвующих в перехвате, без применения сложной наземной инфраструктуры, требующей развертывания на местности большого количества наземных ретрансляционных станций.
Суть изобретения поясняется на фиг.1-5.
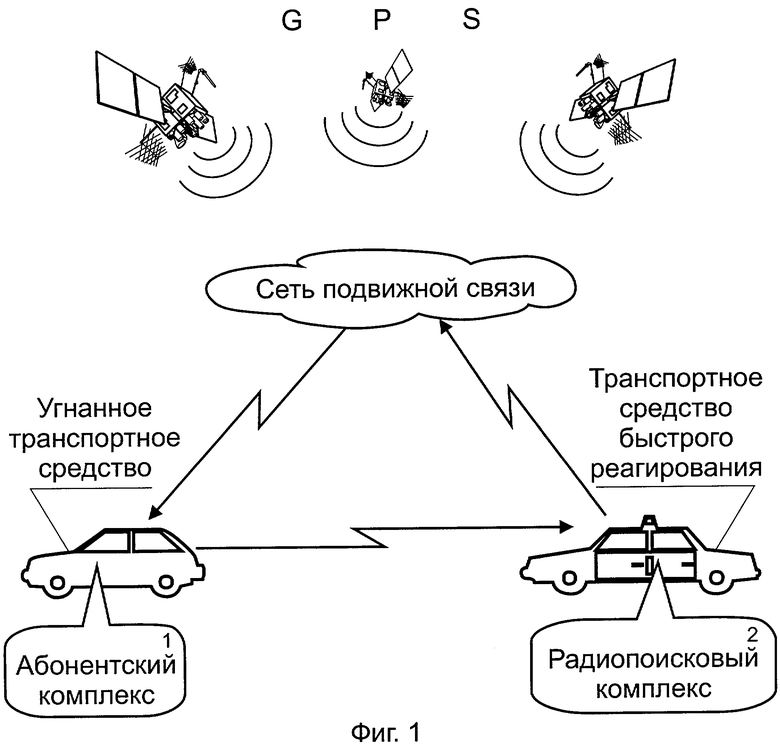
Фиг.1 иллюстрирует общий принцип действия предлагаемой радиопоисковой системы для перехвата УТС.
На фиг.2 представлена структурная схема абонентского комплекса.
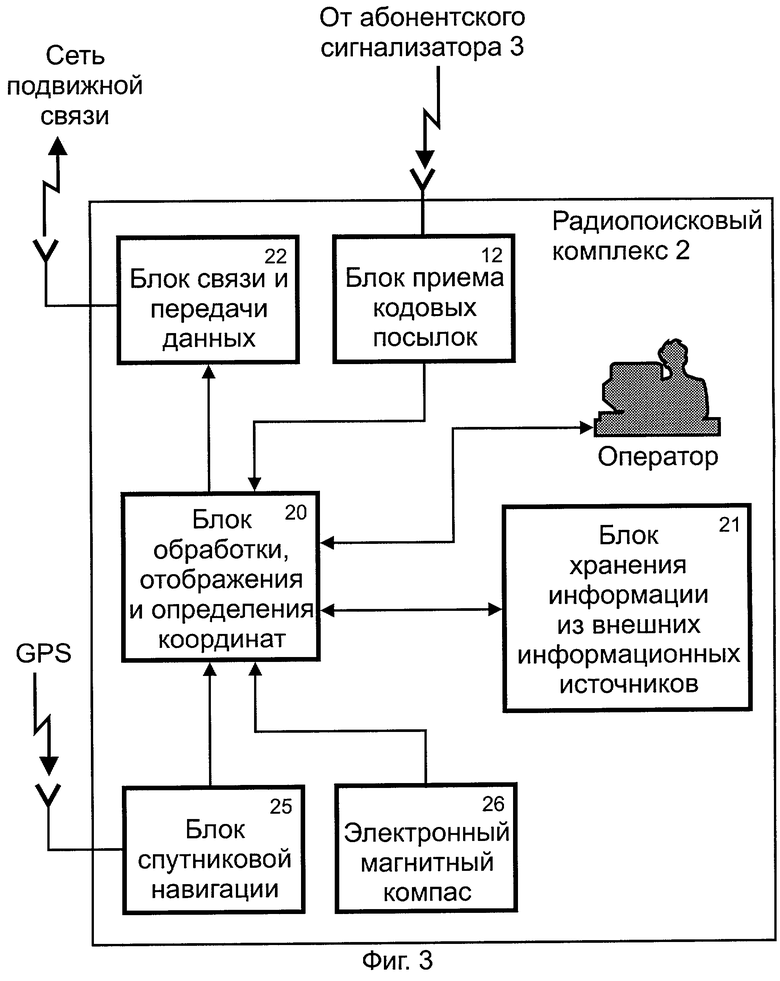
На фиг.3 показана структурная схема радиопоискового комплекса.
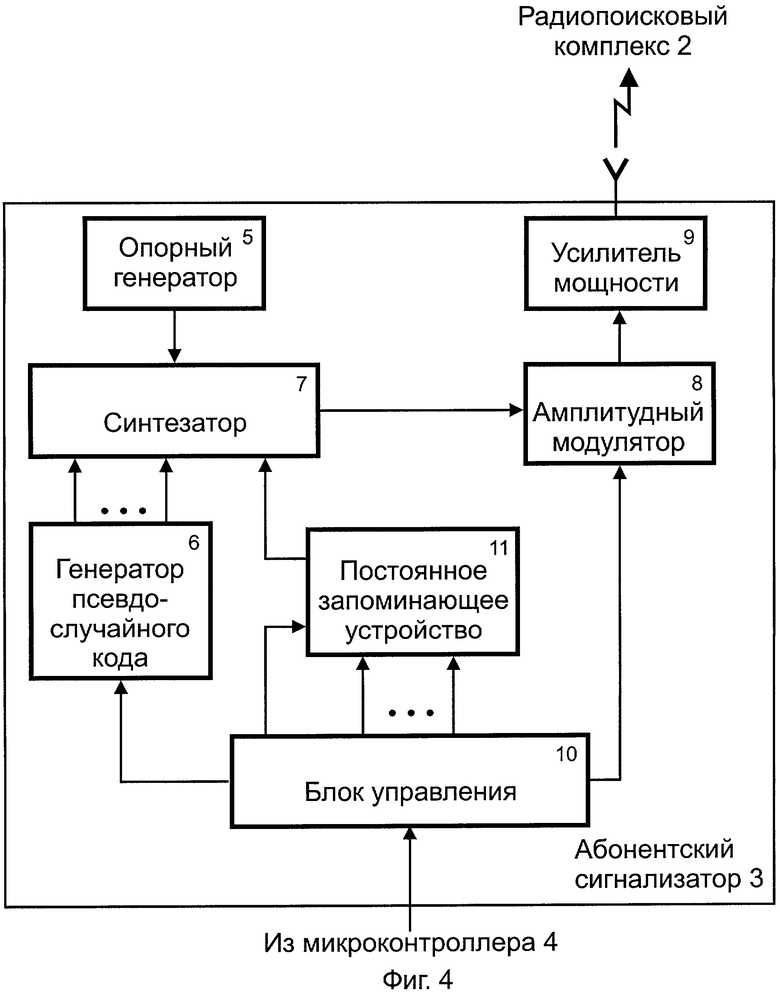
На фиг.4 представлена структурная схема абонентского сигнализатора.
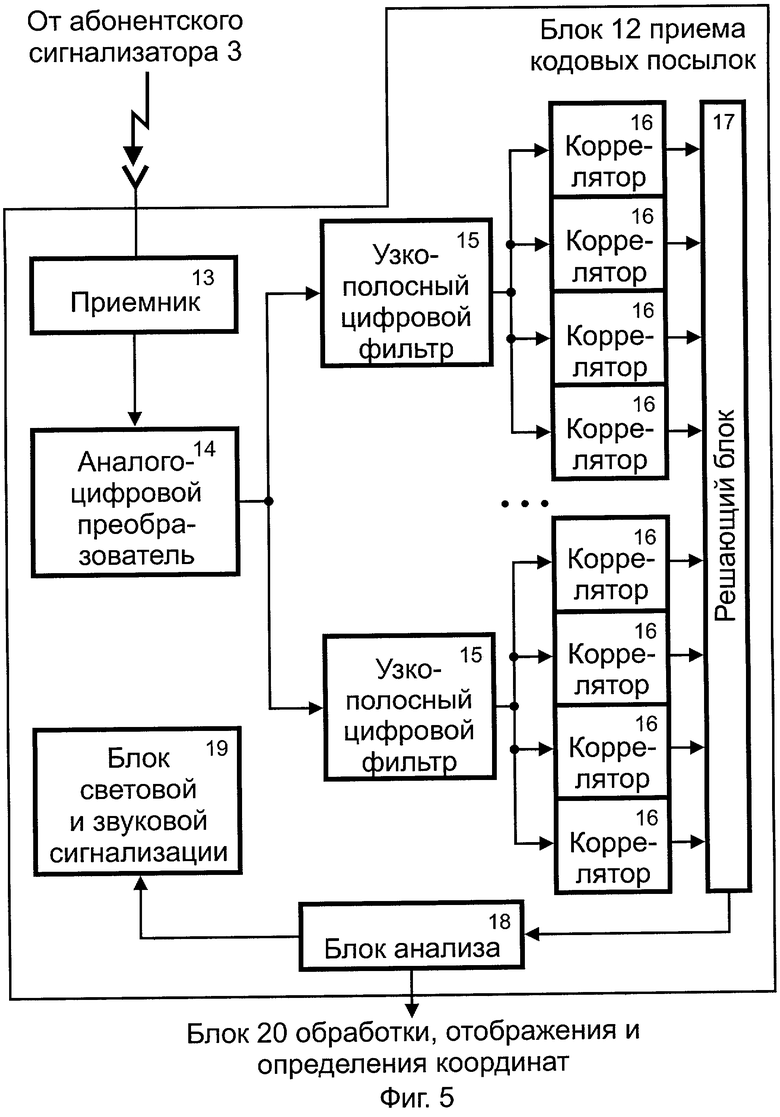
На фиг.5 приведена структурная схема блока приема кодовых посылок.
На фиг.1-5 использованы следующие обозначения: 1 - абонентский комплекс; 2 - радиопоисковый комплекс; 3 - абонентский сигнализатор; 4 - микроконтроллер; 5 - опорный генератор; 6 - генератор псевдослучайного кода; 7 - синтезатор; 8 - амплитудный модулятор; 9 - усилитель мощности; 10 - блок управления; 11 - ПЗУ; 12 - блок приема кодовых посылок; 13 - приемник; 14 - аналого-цифровой преобразователь; 15 - узкополосный цифровой фильтр; 16 - коррелятор; 17 - решающий блок; 18 - блок анализа; 19 - блок световой и звуковой сигнализации; 20 - блок обработки, отображения и определения координат; 21 - блок хранения информации из внешних информационных источников; 22 - блок связи и передачи данных; 23 - абонентский приемник; 24 - абонентский блок спутниковой навигации; 25 - блок спутниковой навигации; 26 - электронный магнитный компас.
В рассматриваемую радиопоисковую систему входят (фиг.1) установленный на борту УТС абонентский комплекс 1 и установленный на борту одного или нескольких ТС быстрого реагирования радиопоисковый комплекс 2, работу которых обеспечивают спутниковая навигационная система (например, GPS) и сеть подвижной связи (пейджинговая и/или стандартная сотовая).
Абонентский комплекс 1 (фиг.2) содержит последовательно соединенные абонентский приемник 23, выполненный с возможностью приема по сети подвижной связи команд управления, микроконтроллер 4 и абонентский сигнализатор 3, выполненный с возможностью излучения в эфир так называемого hopping-сигнала, или сигнала с прыгающими радиочастотами, содержащего кодовые посылки, несущие информацию о категории сообщения и коды идентификационных признаков УТС, на борту которого установлен данный абонентский комплекс 1, в том числе коды принадлежности указанного УТС владельцу и зарегистрированным в системе пользователям. Абонентский комплекс 1 содержит также абонентский блок 24 спутниковой навигации, выход которого подключен к дополнительному входу микроконтроллера 4, выполненного с возможностью преобразования данных спутниковой навигации в формат кодовой посылки, излучаемой с помощью hopping-сигнала абонентским сигнализатором 3. Микроконтроллер 4 выполнен с возможностью приема из блока охранных извещателей извещений и преобразования их в вышеупомянутые кодовые посылки, а также с возможностью приема из абонентского приемника 23 команд управления, преобразования их в команды блокирования движения УТС и передачи их на исполнительные устройства УТС.
Абонентский сигнализатор 3 может быть выполнен, в частности, по схеме, представленной на фиг.4, и состоять из блока 10 управления, выполненного с возможностью подключения к микроконтроллеру 4. При этом первый, групповой выход блока 10 управления соединен с первым групповым входом ПЗУ 11, выход которого подключен к первому входу синтезатора 7. Дополнительный вход ПЗУ 11 соединен с дополнительным выходом блока 10 управления, второй выход которого подключен к первому входу амплитудного модулятора 8, а третий выход - ко входу генератора 6 псевдослучайного кода. Групповой выход генератора 6 псевдослучайного кода соединен со вторым групповым входом синтезатора 7, третий вход которого подключен к выходу опорного генератора 5, а выход - ко второму входу амплитудного модулятора 8, выход которого соединен со входом усилителя 9 мощности. При этом усилитель 9 мощности выполнен с возможностью излучения в радиоэфир hopping-сигнала с кодовыми посылками, несущими информацию о категории сообщения, коды идентификационных признаков УТС и данные спутниковой навигации. Подобная схема построения абонентского сигнализатора 3 реализована на предприятии-заявителе в действующем макете радиопоисковой системы "Карнет-3".
Установленный на борту ТС быстрого реагирования радиопоисковый комплекс 2 (фиг.3) содержит блок 22 связи и передачи данных, подключенный к сети подвижной связи, блок 12 приема кодовых посылок, выполненный с возможностью приема из ретрансляционной сети или от абонентского сигнализатора 3 hopping-сигналов, селекции содержащихся в них кодовых посылок и передачи их в блок 20 обработки, отображения и определения координат, связанный с блоком 21 хранения информации из внешних информационных источников и с персональным компьютером оператора радиопоискового комплекса 2. В память блока 21 хранения информации из внешних информационных источников заранее записывают идентификационные признаки УТС и коды его принадлежности определенному владельцу, а также справочные данные о владельце и других зарегистрированных в системе пользователях данного УТС (телефоны по месту жительства и по месту работы, адрес электронной почты, адрес в Интернет-сети и пр.) и условно-постоянную информацию об участках территории, на которых могут находиться УТС и ТС быстрого реагирования, например электронный план Москвы.
В состав радиопоискового комплекса 2 входят также блок 25 спутниковой навигации и электронный магнитный компас 26, подключенные выходами к соответствующим дополнительным входам блока 20 обработки, отображения и определения координат, выход которого подключен ко входу блока 22 связи и передачи данных. При этом блок 20 обработки, отображения и определения координат выполнен с возможностью решения навигационных уравнений по данным, получаемым от блока 12 приема кодовых посылок, от блока 25 спутниковой навигации и от электронного магнитного компаса 26 (с учетом условно-постоянной информации об участках территории, на которых находятся УТС и ТС быстрого реагирования, получаемой из блока 21 хранения информации из внешних информационных источников).
Блок 12 приема кодовых посылок может быть выполнен по схеме, показанной на фиг.5, которая содержит последовательно соединенные приемник 13, выполненный с возможностью приема по радиоэфиру hopping-сигналов, содержащих кодовые посылки, и аналого-цифровой преобразователь 14, к выходу которого подключены входы нескольких узкополосных каналов, каждый из которых содержит узкополосный цифровой фильтр 15 и четыре коррелятора 16, вход каждого из которых подключен к выходу узкополосного цифрового фильтра 15, а выход - к соответствующему входу решающего блока 17. Также в состав блока 12 приема кодовых посылок входят блок 19 световой и звуковой сигнализации и блок 18 анализа, вход которого подключен к выходу решающего блока 17, а выход - ко входу блока 19 световой и звуковой сигнализации. Указанная схема реализована на предприятии-заявителе с использованием изделий вычислительной техники, выпускаемых американской компанией Analog Devices, Inc.: кодека AD 1836 и цифрового процессора ADSP 2116 IN серии SHARK.
Абонентский 1 и радиопоисковый 2 комплексы реализованы на предприятии-заявителе в составе действующих макетов радиопоисковых систем "Карнет-2" и "Карнет-3" с использованием серийно выпускаемого оборудования охранной системы "Риф Стринг-200" (сертификат соответствия №РОСС RU.ME30.B.01020) и вышеупомянутых зарубежных изделий вычислительной техники. При этом наименования "Карнет®" и "hopping®" являются зарегистрированными предприятием-заявителем товарными знаками (свидетельства №№202430 и 264485, соответственно).
Оборудование сетей подвижной связи (пейджинговой или сотовой) и спутниковой навигационной системы используется в штатных режимах их применения.
Таким образом, возможность практической реализации патентуемой системы не вызывает сомнений.
Рассматриваемая радиопоисковая система для перехвата УТС (фиг.1) работает следующим образом.
Основными участниками операции по поиску и перехвату УТС, оснащенного абонентским комплексом 1 (фиг.2), являются одно или несколько ТС быстрого реагирования, на борту каждого из которых установлен радиопоисковый комплекс 2 (фиг.3). В операции участвуют также внешние системы связи и навигации: сеть подвижной связи каких-либо региональных пейджинговых или сотовых операторов и спутниковая система радионавигации (в рассматриваемом случае глобальная спутниковая система - GPS).
При несанкционированном воздействии на ТС, например, в результате попытки угона или кражи, из установленного на его борту блока охранных извещателей (на фиг.2 не показан) в микроконтроллер 4 абонентского комплекса 1 поступает тревожный сигнал. Микроконтроллер 4 селектирует указанный сигнал и формирует соответствующую команду для абонентского сигнализатора 3.
Абонентский сигнализатор 3 по команде микроконтроллера 4 формирует сигнал с несущей частотой, изменяемой по псевдослучайному закону (hopping-сигнал) и излучает его в эфир. При этом hopping-сигнал служит для передачи двоичного кода посылки. Рассмотрим простейший пример возможной структуры посылки (без исправления ошибок в принятых кодах). В коде посылки при этом выделяются следующие части:
МАРКЕР (общий для всех посылок данной радиопоисковой системы набор символов);
ПРИЗНАК (символы, указывающие на содержание посылки);
Остальные части кода посылки зависят от передаваемого ПРИЗНАКА. Например, если, как было указано выше, формирование посылки было вызвано срабатыванием одного из охранных извещателей, входящих в состав блока охранных извещателей, то в разрядах ПРИЗНАКА должен передаваться набор символов "Признак тревожной посылки". Для этого случая далее в коде посылки выделяется:
АДРЕС (набор символов, определяющий абонентский сигнализатор 3, сформировавший тревожную посылку);
ИНФОРМАЦИЯ (набор символов, конкретизирующий охранный извещатель, срабатывание которого вызвало формирование тревожной посылки, а также тип срабатывания этого извещателя);
КОНТРОЛЬНАЯ СУММА (набор контрольных символов).
Формирование hopping-сигнала, несущего кодовую посылку, осуществляется следующим образом. Как было указано выше, микроконтроллер 4 передает на абонентский сигнализатор 3 (фиг.4) одну из возможных команд, формирование которой было вызвано сигналом, поступившим из блока охранных извещателей. Эта команда поступает в блок 10 управления. По данной команде блок 10 управления запускает генератор 6 псевдослучайного кода. При запуске генератор 6 псевдослучайным образом меняет свой выходной параллельный код, после чего его выходные сигналы остаются неизменными вплоть до следующего запуска.
После этого блок 10 управления начинает формировать последовательный код посылки, соответствующий поступившей на него команде. При формировании кода посылки используются стандартные наборы символов, хранящиеся в ПЗУ 11, а смена разрядов в последовательном коде происходит по импульсам, поступающим от блока 10 управления на дополнительный вход ПЗУ 11. Период (ТБИТ) этих импульсов определяет продолжительность формирования каждого разряда последовательного кода.
Выходной параллельный код генератора 6 псевдослучайного кода и последовательный выходной код ПЗУ 11 подаются на синтезатор 7 и служат для синтезатора 7 сигналами управления. В наборе сигналов управления синтезатора 7 сигнал последовательного кода из ПЗУ 11 является одним из разрядов (но не младшим и не старшим), например, шестым в составе тринадцатиразрядного кода. На синтезатор 7 поступает также высокочастотный сигнал от опорного генератора 5. Частота выходного сигнала синтезатора 7 определяется частотой выходного сигнала опорного генератора 5 и набором сигналов управления от генератора 6 псевдослучайного кода и от ПЗУ 11. Поскольку сигналы генератора 6 псевдослучайного кода не меняются при формировании одной посылки hopping-сигнала, для синтезатора 7 существуют только два набора сигналов управления: один набор при логическом нуле в последовательном коде на выходе ПЗУ 11, а другой набор - при логической единице в последовательном коде на выходе ПЗУ 11. Это означает, что частота выходного сигнала синтезатора 7 меняется синфазно изменению последовательного кода посылки (каждый разряд в которой продолжается в течение ТБИТ), причем разность частот (ΔF), соответствующих логическому нулю и логической единице, на выходе ПЗУ 11 строго постоянна.
Выходной сигнал синтезатора 7 поступает на амплитудный модулятор 8, управляемый блоком 10 управления. При этом на выходе амплитудного модулятора 8 формируются сигналы с частотой, равной частоте выходного сигнала синтезатора 7, но с переменной амплитудой: в интервалы времени, близкие к возможным изменениям сигналов на выходе ПЗУ 11 (то есть, в начале и в конце промежутка времени ТБит), амплитуда выходного сигнала амплитудного модулятора 8 становится минимальной. Сигнал с выхода амплитудного модулятора 8 усиливается в усилителе 9 мощности и излучается в эфир, образуя hopping-сигнал. Переданный по эфиру hopping-сигнал принимается антенной блока 12 приема кодовых посылок в радиопоисковом комплексе 2.
При формировании hopping-сигнала в опорном генераторе 5 не принимается никаких специальных мер обеспечения продолжительного постоянства частоты его выходного сигнала (и это является дополнительным преимуществом, поскольку позволяет использовать недорогие технические решения). Стабильность частоты опорного генератора 5 необходима только при однократной передаче одного hopping-сигнала. С учетом этого можно считать, что при равной вероятности логического нуля и логической единицы в каждом из разрядов параллельного кода генератора 6 псевдослучайного кода выбор частот формирования hopping-сигнала осуществляется по закону, близкому к равномерному, равновероятному.
Принятый приемной антенной блока 12 приема кодовых посылок hopping-сигнал попадает в приемник 13. Приемник 13 осуществляет перенос входной полосы частот сигнала в область более низких (звуковых) частот. Далее, уже в области звуковых частот, сигнал, содержащий кодовую посылку, преобразуется в цифровой вид с помощью аналого-цифрового преобразователя 14.
Далее, преобразованный в набор выборок цифровых кодов сигнал подвергается цифровой фильтрации в N узкополосных цифровых фильтрах 15.
При такой фильтрации весь частотный диапазон приемника 13 разбивается на N равных полос частот (N каналов). Шаг частот (то есть, разность между серединами полос частот соседних каналов) для каждого канала должен быть в целое число раз меньше, чем разность частот (ΔF), соответствующих логическому нулю и логической единице в hopping-сигнале. Например, если при тринадцатиразрядном коде сигналов управления синтезатора 7 сигнал последовательного кода из ПЗУ 11 является в нем шестым разрядом, а N=1024, то шаг частот ровно в четыре раза меньше величины ΔF.
Любой переданный абонентским сигнализатором 3 hopping-сигнал всегда попадает в два канала блока 12 приема кодовых посылок, причем в один из этих каналов попадает логический ноль, а в другой - логическая единица. Для рассмотренного примера номера этих каналов отличаются на четыре. С другой стороны, каждый из каналов настолько узок, что сколько-нибудь существенная величина случайной помехи в нем просто не может накопиться.
Каждый узкополосный цифровой фильтр 15 определяет в строго определенной для него области частот некоторую аддитивную функцию сигнала. Примерами таких функций могут быть сумма амплитуд сигналов или квадрат действующего значения сигнала при известном временном интервале усреднения. Возможно также использование быстрого преобразования Фурье. Спустя некоторые промежутки времени (для указанного выше примера каждый промежуток времени равен 0,25 ТБИТ), из узкополосных цифровых фильтров 15 накопленная аддитивная функция поступает в четыре коррелятора 16, после чего аддитивная функция в узкополосном цифровом фильтре 15 сбрасывается и начинается ее новое накопление.
Корреляторы 16 складывают полученные из соответствующих узкополосных цифровых фильтров 15 значения аддитивной функции и после установленного числа суммирований передают полученный результат в решающий блок 17, после чего - обнуляются и принимают следующее значение аддитивной функции из соответствующего узкополосного цифрового фильтра 15. Для рассмотренного примера промежуток времени между обнулениями каждого коррелятора 16 равен ТБИТ. При этом для четырех корреляторов 16, подключенных к одному и тому же узкополосному цифровому фильтру 15, моменты передачи результатов в решающий блок 17 сдвинуты друг относительно друга на интервал времени накопления аддитивной функции в узкополосном цифровом фильтре 15. В таком случае из четырех корреляторов 16, подключенных к одному и тому же узкополосному цифровому фильтру 15, найдется хотя бы один, для которого моменты обнуления близки к моментам изменения разрядов в hopping-сигнале. Особой точности тут не требуется, поскольку перед и после смены разрядов амплитудный модулятор 8 уменьшает амплитуду hopping-сигнала.
Решающий блок 17 совместно анализирует данные от всех N корреляторов 16, одновременно передающих на него эти данные. Для каждой пары каналов (то есть - в соответствии с примером - для каналов с номерами, отличающимися друг от друга на четыре) в соответствующий участок памяти решающего блока 17 заносится единица, если результат, накопленный в корреляторе 16 канала с большим номером, превышает результат, накопленный в корреляторе 16 канала с меньшим номером. Если это условие не выполняется, в тот же участок памяти заносится ноль. Решающий блок 17 непрерывно сравнивает информацию, записанную в М ячейках подряд (где М - число разрядов МАРКЕРА) каждого из участков памяти с разрядами МАРКЕРА. При совпадении (или при различии в числе разрядов, не превышающем установленный порог), считается предварительно установленным начало выделения кодовой посылки. Если при дальнейшем выделении КОНТРОЛЬНАЯ СУММА в составе кодовой посылки совпадет с подсчитанной величиной контрольной суммы, то кодовая посылка считается полностью выделенной.
После того, как решающий блок 17 полностью выделил какую-либо из кодовых посылок, эта кодовая посылка передается в блок 18 анализа. Блок 18 анализа определяет, не выделялась ли уже ранее эта кодовая посылка. При отсутствии у данной посылки совпадения с ранее выделенными, блок 18 анализа по АДРЕСУ из кодовой посылки определяет абонентский сигнализатор 3, сформировавший данную кодовую посылку. По ИНФОРМАЦИИ кодовой посылки определяется охранный извещатель, срабатывание которого вызвало формирование hopping-сигнала. В зависимости от номеров абонентского сигнализатора 3 и охранного извещателя, блок 18 анализа формирует соответствующее управляющее воздействие для блока 19 световой и звуковой сигнализации, оповещающего экипаж ТС быстрого реагирования о произошедшем событии. Благодаря описанной выше частотно-временной обработке, блок 12 приема кодовых посылок обладает высокой чувствительностью, позволяющей достичь требуемой дальности приема при достаточно малой мощности излучаемого сигнала (менее 10 мВт), разрешенной государственными органами, осуществляющими распределение радиочастот в Российской Федерации.
Одновременно с выхода блока 18 анализа выделенная кодовая посылка поступает в блок 20 обработки, отображения и определения координат.
По АДРЕСУ в принятой кодовой посылке блок 20 обработки, отображения и определения координат запрашивает в компьютерной базе данных блока 21 хранения информации из внешних информационных источников информацию, содержащую идентификационные признаки УТС и коды его принадлежности определенному владельцу, а также справочные данные о владельце и других зарегистрированных пользователях данного УТС (телефоны по месту жительства и по месту работы, адрес электронной почты, адрес в Интернет-сети и пр.). После этого формируются тревожные оповещения, которые через блок 22 связи и передачи данных по сети подвижной связи посылаются данного владельцу УТС и одному или нескольким пользователям, а на борт контролируемого УТС передаются сообщения, содержащие:
- команды управления - для дистанционного блокирования движения УТС;
- координатный код - для использования при передаче координат УТС.
Одновременно выходные данные выводятся из блока 20 обработки, отображения и определения координат на экран монитора персонального компьютера (например, типа ноутбук), находящегося в распоряжении оператора радиопоискового комплекса 2.
Как отмечалось ранее, в качестве сети подвижной связи может использоваться пейджинговая сеть связи (как в системе-прототипе) или стандартная сотовая сеть подвижной связи каких-либо региональных операторов пейджинговой или сотовой связи. При этом существенен не вид используемой сети подвижной связи, а ее возможности посылать текстовые сообщения на пейджер или SMS на сотовый телефон пользователя УТС и, одновременно, команды управления на абонентский приемник 23 абонентского комплекса 1, установленного на борту УТС.
Пейджинговое сообщение или SMS, посылаемые пользователю УТС, необходимы для своевременного обращения последнего с официальным заявлением в милицию.
Команды управления, посылаемые на борт УТС, предназначены для оперативного воздействия на его органы управления. Получив такую команду, абонентский приемник 23 передает ее в микроконтроллер 4, который формирует соответствующую команду блокирования движения УТС. Указанная команда поступает на исполнительные устройства, например на иммобилайзер, который блокирует двигатель УТС. Это существенно усложняет задачу угонщика и создает более благоприятные условия для экипажа ТС быстрого реагирования, осуществляющего перехват УТС.
Предположим, однако, что угонщику удалось нейтрализовать команду блокирования и УТС может находиться в движении (например, посредством буксировки).
В этом случае возникает задача определения текущего местоположения УТС. Причем важны не абсолютные географические координаты УТС, а его относительное местоположение на местности относительно общих с ТС быстрого реагирования опорных ориентиров (ближайших домов, перекрестков и т.п.). Точность определения относительного местоположения должна быть достаточно высокой для того, чтобы на заключительной стадии перехвата можно было обеспечить визуальный контакт экипажа ТС быстрого реагирования с УТС.
В системе-прототипе указанная задача решалась с помощью двухэтапной процедуры: вначале в наземном информационном центре грубо определялось местоположение УТС, а затем с борта ТС быстрого реагирования осуществлялась радиопеленгация УТС и уточнялось его местоположение относительно ТС быстрого реагирования.
В предлагаемой радиопоисковой системе указанная навигационная задача решается одноэтапно - непосредственно на борту ТС быстрого реагирования. Источником координатной информации о текущем местоположении УТС является абонентский блок 24 спутниковой навигации, входящий в состав абонентского комплекса 1.
Источниками информации о текущем местоположении и о направлении движения ТС быстрого реагирования являются, соответственно, блок 25 спутниковой навигации и электронный магнитный компас 26, входящие в состав радиопоискового комплекса 2, установленного на борту ТС быстрого реагирования.
Абонентский блок 24 и блок 25 спутниковой навигации, установленный на борту ТС быстрого реагирования, построены на основе GPS-приемника (либо комбинированного приемника GPS/ГЛОНАСС).
Приняв и обработав в штатном режиме сигналы со спутников, абонентский блок 24 спутниковой навигации передает выходную информацию о местоположении УТС в географической системе координат в микроконтроллер 4, который преобразует ее в формат кодовой посылки, излучаемой абонентским сигнализатором 3 посредством hopping-сигнала.
Этот формат несколько отличается от приведенного выше формата, используемого при передаче двоичного кода посылки. Простейший пример формата посылки hopping-сигнала с информацией о местонахождении УТС может включать в себя следующие составные части:
МАРКЕР (совпадает с МАРКЕРОМ при передаче двоичного кода тревожной посылки);
ПРИЗНАК (как и при передаче двоичного кода тревожной посылки это набор символов, указывающий на содержание посылки, но поскольку содержание посылки другое, в этих разрядах должен передаваться "Признак местоположения");
КООРДИНАТНЫЙ КОД (код, переданный в сообщении на УТС по сети подвижной связи);
СИГНАЛЫ GPS-ПРИЕМНИКА (это непосредственный координатный код местоположения УТС).
Указанная координатная информация поступает в блок 12 приема кодовых посылок и, далее, в блок 20 обработки, отображения и определения координат.
Одновременно, приняв и обработав в штатном режиме сигналы с навигационных спутников, блок 25 спутниковой навигации, входящий в состав радиопоискового комплекса 2 ТС быстрого реагирования, передает выходную информацию о текущем местоположении ТС быстрого реагирования в блок 20 обработки, отображения и определения координат.
Данные о местоположении, соответственно, УТС и ТС быстрого реагирования, полученные от блока 12 приема кодовых посылок и от блока 25 спутниковой навигации, преобразуются в формат ГИС, установленной на персональном компьютере оператора радиопоискового комплекса 2, и отображаются в виде специальных отметок на экране монитора на фоне плана участка местности, соответствующего географическим координатам УТС и ТС быстрого реагирования. Кроме того, на экран может быть выведена также текстовая информация, характеризующая принадлежность УТС (адрес, фамилия, имя, отчество владельца, телефоны зарегистрированных пользователей и т.п.).
Местоположение УТС и ТС быстрого реагирования отображается в виде замкнутых геометрических фигур (кругов, эллипсов, прямоугольников), размеры которых соответствуют ошибкам навигационных измерений.
В алгоритме определения координат в блоке 20 обработки, отображения и определения координат используется, кроме того, условно постоянная информация о плане местности и расположении на нем различных городских объектов с известными координатами, поступающая из блока 21 хранения информации из внешних информационных источников. Слежение за местоположением УТС и ТС быстрого реагирования осуществляется с помощью известных алгоритмов автосопровождения, применяемых, например, в радиолокации. Траектории перемещения УТС и ТС быстрого реагирования на местности фиксируются в цифровой памяти блока 20 обработки, отображения и определения координат и, при необходимости, могут быть вызваны на экран монитора оператора радиопоискового комплекса 2.
В алгоритмах автосопровождения учитываются граф улично-дорожной сети и другая условно постоянная информация, получаемая по запросам оператора из блока 21 хранения информации из внешних информационных источников, что также позволяет повысить точность и устойчивость автосопровождения. При этом ТС быстрого реагирования не демаскирует себя, как в системе-прототипе, характерного вида пеленгационными антеннами. Что касается антенн GPS, то они могут быть установлены более скрытно, чем пеленгационные антенны, и применяются в настоящее время на ТС различного назначения, включая частный автотранспорт.
Постоянно имея перед глазами план участка местности с перемещающимися на нем отметками УТС и ТС быстрого реагирования, оператор может выбрать наиболее рациональный маршрут сближения ТС быстрого реагирования с преследуемым УТС. При этом, благодаря дополнительной информации, получаемой из блока 21 хранения информации из внешних информационных источников, экипаж ТС быстрого реагирования, в отличие от угонщика, может учесть наличие таких препятствий движению как участки, на которых ведутся дорожно-строительные работы, "пробки" на улично-дорожной сети и т.п., что также повышает эффективность перехвата.
Требуемое направление движения ТС быстрого реагирования определяется с помощью показаний электронного магнитного компаса 26, данные которого поступают в блок 20 обработки, отображения и определения координат и учитываются при решении навигационной задачи.
Кроме того, оператор, использующий бортовой персональный компьютер, может воспользоваться другими известными программными продуктами для оптимизации движения патрульных групп милиции, например, ГИС "Территория" или "УВД", производимыми фирмой "КИБЕРСО" (www.glasnet.ru). Использование в них графов улично-дорожной сети также повышает эффективность перехвата УТС и делает его возможным даже при временных пропаданиях спутниковой навигационной информации, вследствие влияния высотных городских строений. При этом, в отличие от прототипа, в рассматриваемой системе отсутствует сложная ретрансляционная сеть, создание которой требует больших капитальных затрат, а вся обработка информации и принятие решений осуществляются непосредственно на борту ТС быстрого реагирования, что обуславливает высокую степень мобильности системы.
Таким образом, предлагаемым изобретением решается задача создания радиопоисковой системы для перехвата УТС со значительно большей мобильностью, скрытностью и помехозащищенностью, чем у системы-прототипа и вышеупомянутых аналогов. Указанная радиопоисковая система не требует для своей работы наземных ретрансляционных станций, что облегчает ее развертывание и снижает капитальные затраты. Обеспечиваемый технический результат заключается в повышении точности определения относительного местоположения УТС и ТС быстрого реагирования, участвующих в перехвате. Причем этот результат достигается без установки на борту ТС быстрого реагирования демаскирующих элементов (радиопеленгационных антенн).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ И ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2309064C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |

Изобретение относится к охранным системам, обеспечивающим поиск, обнаружение и определение текущего местоположения транспортных средств (ТС), а также возможность перехвата угнанных ТС с помощью ТС быстрого реагирования. На борту ТС установлен абонентский комплекс с приемником, связанным по радиоэфиру с сетью подвижной связи, микроконтроллером, подключенным к блоку охранных извещателей и исполнительным устройствам, блоком спутниковой навигации и абонентским сигнализатором, излучающим на несущей частоте кодовые посылки в виде hopping-сигнала с информацией о категории сообщения и кодах идентификационных признаков ТС. Ретрансляционная сеть принимает кодовые посылки от абонентских сигнализаторов и передает их к ТС быстрого реагирования с установленными на борту радиопоисковыми комплексами. Каждый из них содержит блок связи и передачи данных, подключенный к сети подвижной связи, блок хранения информации из внешних источников, блок приема кодовых посылок от ретрансляционной сети или абонентских сигнализаторов, блок обработки, отображения и определения координат, персональный компьютер оператора, блок спутниковой навигации и электронный магнитный компас. Изобретение обеспечивает повышение точности определения относительного местоположения угнанного ТС и ТС быстрого реагирования, участвующих в перехвате. 2 з.п. ф-лы. 5 ил.
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| СИСТЕМА ОПЕРАТИВНОГО СЛЕЖЕНИЯ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2179121C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2155684C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОХРАННОЙ СИСТЕМОЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2074826C1 |

