Область техники к которой относится изобретение
Настоящее изобретение относится к устройству управления источником питания, способному определять спаивание реле.
Уровень техники
В последние годы гибридные транспортные средства и электрические транспортные средства привлекают внимание как не наносящие вреда окружающей среде транспортные средства. Гибридные транспортные средства используют, кроме традиционного двигателя, источник питания постоянного тока, обратный преобразователь и мотор, приводимый в действие обратным преобразователем, как источник механической энергии. То есть гибридное транспортное средство получает механическую энергию посредством управления двигателем и также посредством преобразования постоянного напряжения от источника питания постоянного тока в переменное напряжение обратным преобразователем и вращением мотора преобразованным переменным напряжением.
Электрические транспортные средства используют источник питания постоянного тока, обратный преобразователь и мотор, приводимый в действие обратным преобразователем, как источник механической энергии.
Таким образом, гибридное транспортное средство и электрическое транспортное средство оборудованы устройством привода мотора, включающего источник питания постоянного тока и обратный преобразователь. На входной стороне обратного преобразователя предусмотрен конденсатор для обеспечения обратного преобразователя свободным от помех постоянным напряжением. В дополнение, предусмотрено системное реле между источником питания постоянного тока и обратным преобразователем (см., например, выложенный патент Японии №2000-134707 и выложенный патент №2004-303691).
Подробно, выложенный патент Японии №2000-134707 раскрывает системное реле, образованное сопротивлением R и системным реле SMR1, последовательно соединенными с катодом источника питания постоянного тока, системное реле SMR2, присоединенное к катоду источника питания постоянного тока, параллельно с сопротивлением R и системным реле SMR1, и системное реле SMR3, присоединенное к аноду источника питания постоянного тока. Спаивание каждого из системных реле SMR1-SMR3 определяется на основе напряжения между обоими концами конденсатора, когда системные реле SMR1, SMR3 включаются/выключаются независимо.
Согласно выложенному патенту Японии №2000-134707, спаивание системного реле SMR3 на стороне анода сначала определяется на основе напряжения между обоими концами конденсатора, когда только системное реле SMR1, которое соединено последовательно с сопротивлением R, включено. Далее, спаивание системного реле SMR1 или SMR2 на стороне катода определяется на основе напряжения конденсатора, когда включено только реле SMR3 на стороне анода.
Следовательно, когда спаяно системное реле SMR1, соединенное последовательно с сопротивлением R, и когда включено только системное реле SMR3 на стороне анода после того, как обнаружено спаивание системного реле SMR3 на стороне анода, батарея большой емкости подключена к нагрузочной стороне через сопротивление R и системное реле SMR1, также как и системное реле SMR3. В результате ток течет от батареи большой емкости к нагрузочной стороне через сопротивление R и системное реле SMR1, также как и системное реле SMR3, и заряд подается на конденсатор.
В этой ситуации, поскольку заряд подан с батареи на конденсатор для того, чтобы скомпенсировать разряд на нагрузку, напряжение между обоими концами конденсатора не уменьшается и сохраняется на, по существу, постоянном уровне. Следовательно, большая величина тока для подачи заряда на конденсатор постоянно течет через сопротивление R, которое изначально создано с техническими требованиями, принимающими во внимание величину сопротивления и термостойкость, существенные для предотвращения мгновенного большого тока (пускового тока), и соответственно сопротивление R может быть повреждено вследствие непредвиденного выделения тепла.
Целью настоящего изобретения является предоставление устройства управления источником питания, способного к определению спаивания реле одновременно с защитой сопротивления.
Раскрытие изобретения
Согласно настоящему изобретению, устройство управления источником питания включает в себя первое реле и сопротивление, последовательно подключенные между анодом источника питания постоянного тока и нагрузкой, второе реле, подключенное между анодом источника питания постоянного тока и нагрузкой параллельно с первым реле и сопротивлением, подключенным последовательно, третье реле, подключенное между катодом источника питания постоянного тока и нагрузкой, датчик тока, обнаруживающий постоянный ток, текущий через сопротивление, емкостной элемент, у которого один вывод подключен к стороне катода источника питания постоянного тока через третье реле, а другой вывод подключен к стороне анода источника питания постоянного тока через первое реле и сопротивление, подключенное параллельно и второе реле для подачи энергии подаваемой от источника питания постоянного тока на нагрузку, датчик напряжения, обнаруживающий напряжение между обоими концами емкостного элемента, и определяющей части, определяющей спаивание реле с первого по третье.
Определяющая часть включает первую определяющую часть, определяющую спаивание первого реле на основе постоянного тока, обнаруженного датчиком тока, вторую определяющую часть, определяющую спаивание каждого из второго и третьего реле на основе напряжения, обнаруженного датчиком напряжения в каждой из ситуаций, в которых только третье реле приведено в проводящее состояние и только первое реле приведено в проводящее состояние, согласно установленной модели после выполнения первой определяющей части, и останавливающую определение часть, останавливающую выполнение второй определяющей части, когда первая определяющая часть определяет, что первое реле спаяно.
Согласно настоящему изобретению, когда первое реле спаяно, определяющая часть не делает определения спаивания второго и третьего реле, которое не допустимо. Вместе с этим, сопротивление может быть защищено от чрезмерного тока, который течет во время определения спаивания второго реле.
Вторая определяющая часть предпочтительно определяет спаивание второго реле на основе напряжения, обнаруженного датчиком напряжения, когда только третье реле приведено в проводящее состояние для подачи энергии от емкостного элемента на нагрузку. Останавливающая определяющая часть включает в себя часть источника питания, приводящую второе и третье реле в непроводящее состояние для подачи энергии от емкостного элемента на нагрузку.
В частности, когда первое реле спаяно, определяющая часть может приводить второе и третье реле в непроводящее состояние и разряжать емкостной элемент для предотвращения течения чрезмерного тока через сопротивление.
Останавливающая определение часть предпочтительно дополнительно включает в себя третью определяющую часть, определяющую спаивание третьего реле на основе напряжения, обнаруженного датчиком напряжения, когда второе и третье реле приведено в проводящее состояние для подачи энергии от емкостного элемента на нагрузку.
Предпочтительно, третья определяющая часть определяет, что третье реле спаяно, когда датчик напряжения обнаруживает напряжение вне установленного диапазона напряжений, когда второе и третье реле приведены в непроводящее состояние.
Вместе с этим, спаивание третьего реле может дополнительно быть обнаружено посредством обнаружения напряжения между обоими концами емкостного элемента во время разрядки емкостного элемента.
Останавливающая определение часть предпочтительно дополнительно включает в себя третью определяющую часть, определяющую спаивание третьего реле на основе постоянного тока, обнаруженного датчиком тока, когда второе и третье реле приведены в непроводящее состояние для подачи энергии от емкостного элемента на нагрузку.
Предпочтительно, третья определяющая часть определяет, что третье реле спаяно, когда датчик тока обнаруживает постоянный ток по меньшей мере опорного значения, когда второе и третье реле приведены в непроводящее состояние.
Вместе с этим, спаивание третьего реле может дополнительно быть определено посредством обнаружения постоянного тока, протекающего через сопротивление во время разрядки емкостного элемента.
Первая определяющая часть предпочтительно определяет, что первое реле спаяно, когда датчик тока обнаруживает постоянный ток по меньшей мере опорного значения, когда только третье реле приведено в проводящее состояние.
Вместе с этим, спаивание первого реле может быть быстро обнаружено посредством обнаружения постоянного тока, текущего через сопротивление.
Вторая определяющая часть предпочтительно определяет, что второе реле спаяно, когда датчик напряжения определяет напряжение вне установленного диапазона напряжений, когда только третье реле приведено в проводящее состояние для подачи энергии от емкостного элемента на нагрузку. Вторая определяющая часть также определяет, что третье реле спаяно, когда датчик напряжения обнаруживает напряжение по меньшей мере порогового значения, когда только первое реле приведено в проводящее состояние для подачи энергии от емкостного элемента на нагрузку.
Вместе с этим, когда определено, что первое реле не спаяно, спаивание второго и третьего реле может быть определено на основе изменения напряжения между обоими концами емкостного элемента во время его разрядки.
Согласно настоящему изобретению, поскольку спаивание второго и третьего реле не определяется, когда первое реле спаяно, сопротивление может быть защищено от чрезмерного тока, который течет во время определения спаивания. В результате разрушение сопротивления может быть предотвращено.
Краткое описание чертежей
Фиг.1 - схематическая структурная схема устройства привода мотора, включающая устройство управления источником питания согласно варианту осуществления настоящего изобретения.
Фиг.2 - временная диаграмма для описания процесса определения спаивания системных реле SMRB, SMRP и SMRG, показанных на фиг.1.
Фиг.3 - временная диаграмма для описания процесса определения спаивания системных реле SMRP и SMRB.
Фиг.4 - блок-схема для описания процесса определения спаивания системных реле SMRB, SMRP и SMRG, показанных на фиг.1.
Лучшие варианты осуществления изобретения
Вариант осуществления настоящего изобретения будет описан подробно со ссылкой на чертежи. Должно быть отмечено, что одинаковые символы на чертежах обозначают одинаковые или соответствующие части.
Фиг.1 - схематическая структурная схема устройства привода мотора, включающая устройство управления источником питания согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг.1, устройство 100 привода мотора включает источник B питания постоянного тока, датчики 10, 20 напряжения, системные реле SMRB, SMRP, SMRG, емкостные элементы 11, 13, повышающий преобразователь 12, обратные преобразователи 14, 31, датчики 24, 26, 28 тока и устройство 30 управления.
Мотор-генератор MG1 установлен, например, на гибридное транспортное средство. Мотор-генератор MG1 является мотором, подключенным к двигателю (не показан) гибридного транспортного средства, который имеет функцию генератора, приводимого двигателем, и также функционирует как электромотор для двигателя, который может выполнять, например, запуск двигателя. Топливная экономичность и выхлопные газы гибридного транспортного средства могут быть улучшены посредством приладки момента для генерирования электрической энергии мотора-генератора MG1 для регулирования для поддержки двигателя в эффективном состоянии приведения в действие.
Мотор-генератор MG2 установлен, например, на гибридное транспортное средство. Мотор-генератор MG2 является мотором для создания момента для привода ведущего колеса гибридного транспортного средства. В дополнение, когда мотор-генератор MG2 вращается вместе с вращением ведущего колеса во время замедления транспортного средства, например, мотор-генератор MG2 может функционировать как генератор (функция так называемой регенерации).
Системное реле SMRB подключено последовательно между катодом источника B питания постоянного тока и положительным электродом конденсатора 11. Системное реле SMRG подключено последовательно между анодом источника B питания постоянного тока и отрицательным электродом конденсатора 11. Системное реле SMRP и сопротивление Rp подключены параллельно с системным реле SMRG между анодом источника B питания постоянного тока и отрицательным электродом конденсатора 11.
Повышающий преобразователь 12 включает в себя дроссель LI, n-p-n транзисторы Q1, Q2 и диоды D1 и D2. Дроссель LI одним концом присоединен к линии питания источника B питания постоянного тока, а другим концом присоединен к средней точке между n-p-n транзистором Q1 и n-p-n транзистором Q2, то есть к точке между эмиттером n-p-n транзистора Q1 и коллектором n-p-n транзистора Q2. n-p-n транзисторы Q1, Q2 подключены последовательно между линией питания и линией заземления. В дополнение, коллектор n-p-n транзистора Q1 соединен с линией питания, а эмиттер n-p-n транзистора Q2 соединен с линией заземления. Диоды D1, D2 для текущих токов от эмиттерной стороны к коллекторной стороне подключены соответственно между коллекторами и эмиттерами n-p-n транзисторов Q1, Q2. Обратный преобразователь 14 сформирован плечом 15 U-фазы, плечом 16 V-фазы и плечом 17 W-фазы. Плечо 15 U-фазы, плечо 16 W-фазы и плечо 17 W-фазы предоставлены параллелно друг другу между линией питания и линией заземления.
Плечо 15 U-фазы сформировано n-p-n транзисторами Q3, Q4, соединенными последовательно, плечо 16 V-фазы сформировано n-p-n транзисторами Q5, Q6, соединенными последовательно, плечо 17 W-фазы сформировано n-p-n транзисторами Q7, Q8, соединенными последовательно. Диоды D3-D8 для текущих токов от эмиттерной стороны к коллекторной стороне подключены соответственно между коллекторами и эмиттерами n-p-n транзисторов Q3-Q8.
Средняя точка каждого плеча фазы подключена к каждому фазовому концу каждой катушки фазы мотора-генератора MG1. То есть мотор-генератор MG1 является мотором с постоянным магнитом с тремя фазами, сформированными тремя катушками U-, V- и W-фаз, имеющими соответствующие одни концы, подключенные вместе в средней точке. Другой конец катушки U-фазы подключен к средней точке между n-p-n транзисторами Q3, Q4, другой конец катушки V-фазы подключен к средней точке между n-p-n транзисторами Q5, Q6, и другой конец катушки W-фазы подключен к средней точке между n-p-n транзисторами Q7, Q8.
Обратный преобразователь 31 имеет то же устройство, что и обратный преобразователь 14.
Источник B питания постоянного тока сформирован вторичной батареей, такой как никель-металлгидридная батарея или литий-ионная батарея. Датчик 10 напряжения обнаруживает постоянное напряжение Vb на выходе источника B питания постоянного тока и выводит обнаруженное постоянное напряжение Vb на устройство 30 управления.
Системные реле SMRB, SMRG, SMRP соответственно включаются/выключаются сигналами SEB, SEG, SEP с устройства 30 управления. Более точно, системные реле SMRB, SMRG, SMRP соответственно включаются сигналами SEB, SEG, SEP на уровне H (логический высокий) и соответственно выключаются сигналами SEB, SEG, SEP на уровне L (логический низкий).
Конденсатор 11 сглаживает постоянное напряжение Vb, подаваемое от источника B питания постоянного тока, и подает сглаженное постоянное напряжение на повышающий преобразователь 12.
Повышающий преобразователь 12 повышает напряжение Vb, подаваемое с конденсатора 11, и подает результат на конденсатор 13. Более точно, повышающий преобразователь 12 принимает сигнал PWMC от устройства 30 управления, повышает постоянное напряжение Vb согласно периоду включения n-p-n транзистора Q2 сигналом PWMC и подает результат на конденсатор 13.
В дополнение, когда повышающий преобразователь 12 принимает сигнал PWMC от устройства 30 управления, повышающий преобразователь 12 понижает постоянное напряжение от обратного преобразователя 14 и/или обратного преобразователя 31 через конденсатор 13 для зарядки источника B питания постоянного тока.
Конденсатор 13 сглаживает постоянное напряжение от повышающего преобразователя 12 и подает сглаженное постоянное напряжение на обратные преобразователи 14, 31 через узлы N1, N2. Датчик 20 напряжения обнаруживает напряжение VH между обоими концами конденсатора 13 (соответствующее выходному напряжению повышающего преобразователя 12 и входному напряжению обратных преобразователей 14, 31, которые являются одинаковыми в следовании) и выводит обнаруженное напряжение VH на устройство 30 управления.
Когда постоянное напряжение подается с конденсатора 13, обратный преобразователь 14 преобразует постоянное напряжение в переменное напряжение на основе сигнала PWMI1 от устройства 30 управления для приведения в действие мотора-генератора MG1. Вместе с этим, мотор-генератор MG1 приводится в действие для произведения момента, заданного значением TR1 команды момента.
В дополнение, во время восстанавливающего торможения гибридного транспортного средства, имеющего установленное на нем устройство 100 привода мотора, обратный преобразователь 14 преобразует переменное напряжение, генерируемое мотором-генератором MG1, в постоянное напряжение на основе сигнала PWMI1 от устройства 30 управления и подает преобразованное постоянное напряжение на повышающий преобразователь 12 через конденсатор 13. Следует отметить, что "восстанавливающее торможение", используемое здесь, включает в себя торможение, приводящее к регенерации, когда водителем гибридного транспортного средства выполняется действие ножного тормоза, или замедление (или остановка ускорения) транспортного средства с регенерацией посредством выключения педали акселератора во время вождения, а не действия ножного тормоза.
Когда постоянное напряжение подается с конденсатора 13, обратный преобразователь 31 преобразует постоянное напряжение в переменное напряжение на основе сигнала PWMI2 от устройства 30 управления для приведения в действие мотора-генератора MG2. Вместе с этим, мотор-генератор MG2 приводится в действие для произведения момента, заданного значением TR2 команды момента.
В дополнение, во время восстанавливающего торможения гибридного транспортного средства, имеющего установленное на нем устройство 100 привода мотора, обратный преобразователь 31 преобразует переменное напряжение, генерируемое мотором-генератором MG2, в постоянное напряжение на основе сигнала PWMI2 от устройства 30 управления и подает преобразованное постоянное напряжение на повышающий преобразователь 12 через конденсатор 13.
Датчик 24 тока обнаруживает ток MCRT1 мотора, текущий через мотор-генератор MG1, и выводит обнаруженный ток мотора MCRT1 на устройства 30 управления. Датчик 26 тока обнаруживает ток Ip, текущий через сопротивление Rp (далее здесь также упоминаемый как "ток Ip предварительной зарядки"), и выводит обнаруженный ток Ip предварительной зарядки на устройство управления 30. Датчик 28 тока обнаруживает ток MCRT2 мотора, текущий через мотор-генератор MG2, и выводит обнаруженный ток мотора MCRT2 на устройство 30 управления.
Устройство 30 управления принимает от датчика 10 напряжения постоянное выходное напряжение Vb от источника B питания постоянного тока, принимает токи моторов MCRT1, MCRT2 от соответствующих датчиков 24, 28 тока, принимает напряжение VH между обоими концами конденсатора 13 от датчика 20 напряжения, принимает значения команд момента TR1, TR2 и чисел вращения моторов MRN1, MRN2 от внешнего ECU (блок электрического управления) и принимает сигнал IG от ключа зажигания (не показан).
Когда устройство 30 управления принимает сигнал IG на уровне H от ключа зажигания, устройство 30 управления определяет спаивание системного реле SMRP на основе тока Ip предварительной зарядки, принятого от датчика 26 тока посредством описанного ниже способа.
В этой ситуации, когда определено, что системное реле SMRP не спаяно, устройство 30 управления управляет системными реле SMRB, SMRP, SMRG с тем, чтобы предварительно заряжать конденсатор 13.
Кроме того, после завершения предварительной зарядки конденсатора 13 устройство 30 управления генерирует сигнал PWMI1 на основе напряжения VH, тока мотора MCRT1 и значения TR1 команды момента, каковой сигнал PWMI1 предназначен для управления переключения n-p-n транзисторов Q3-Q8 обратного преобразователя 14 во время приведения в действие мотора-генератора MG1 посредством обратного преобразователя 14, и выводит произведенный сигнал PWMI1 на обратный преобразователь 14.
Устройство 30 управления также генерирует сигнал PWMI2 на основе напряжения VH, тока мотора MCRT2 и значения TR2 команды момента, каковой сигнал PWMI2 предназначен для управления переключения n-p-n транзисторов Q3-Q8 обратного преобразователя 31 во время приведения в действие мотора-генератора MG2 посредством обратного преобразователя 31, и выводит произведенный сигнал PWMI2 на обратный преобразователь 31.
Кроме того, когда обратный преобразователь 14 (или 31) приводит в действие мотор-генератор MG1 (или MG2), устройство 30 управления генерирует сигнал PWMC для управления переключением n-p-n транзисторами Q1, Q2 повышающего преобразователя 12 на основе постоянного напряжения Vb, напряжения VH, значения TR1 (или TR2) инструкции момента и числа MRN1 (или MRN2) вращения мотора посредством способа, описанного ниже, и выводит сигнал на повышающий преобразователь 12.
Когда устройство 30 управления принимает сигнал IG на уровне L от ключа зажигания, устройство 30 управления определяет спаивание системных реле SMRG, SMRB способом, описанным ниже, на основе напряжения VH между обоими концами конденсатора 13, которое принимается от датчика 20 напряжения. То есть устройство 30 управления определяет спаивание системного реле SMRP при запуске системы транспортного средства и, когда определено, что системное реле SMRP не спаяно, определяет спаивание системных реле SMRG, SMRB при прекращении работы системы транспортного средства.
Когда определено, что по меньшей мере одно из системных реле SMRB, SMRP, SMRG спаяно, устройство 30 управления генерирует сигнал EMG для зажигания лампы 40 предупреждения и выводит сигнал на лампу 40 предупреждения. Лампа 40 предупреждения зажигается в ответ на сигнал EMG от устройства 30 управления.
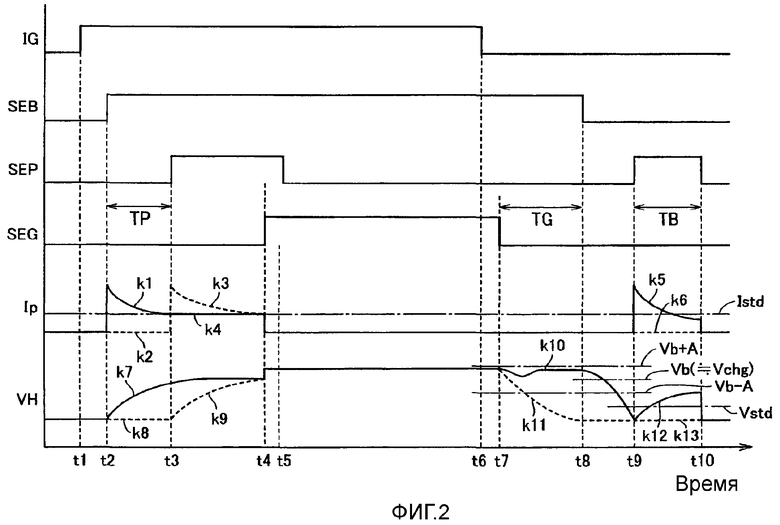
Фиг.2 - временная диаграмма для описания процесса определения спаивания системных реле SMRB, SMRP, SMRG, показанных на фиг.1.
Обращаясь к фиг.2, когда сигнал IG от внешнего ECU переключается с уровня L на уровень H в момент t1 времени с включением ключа зажигания, устройство 30 управления только генерирует сигнал SEB на уровне H в момент t2 времени и выводит сигнал на системное реле SMRB. Вместе с этим, включается только системное реле SMRB (что соответствует проводящему состоянию). Сигнал SEB переключается на уровень L в момент времени t8, который позже момента t6 времени выключения ключа зажигания при прекращении работы системы. То есть устройство 30 управления включает системное реле SMRB во время временного интервала от t2 до t8.
Затем устройство 30 управления генерирует сигнал SEP на уровне H в момент t3 времени и выводит сигнал на системное реле SMRP. Вместе с этим, системное реле SMRP включается.
Во время интервала TP с момента времени t2 до момента времени t3 устройство 30 управления определяет в отношении того, является ли системное реле SMRP спаянным или нет, на основе тока Ip предварительной зарядки от датчика 26 тока. Подробно, устройство 30 управления определяет, что системное реле SMRP спаяно, когда после момента t2 времени, в который включено только системное реле SMRB, датчик 26 тока обнаруживает ток Ip предварительной зарядки, как показано кривой k1, который резко увеличивается за опорным значением Istd и затем уменьшается. С другой стороны, устройство 30 управления определяет, что системное реле SMRP не спаяно, когда датчик 26 тока обнаруживает нулевой ток Ip предварительной зарядки, как показано прямой линией k2 во время интервала времени TP.
Когда определено, что системное реле SMRP не спаяно, устройство 30 управления генерирует сигнал SEP уровня H в момент t3 времени и выводит сигнал на системное реле SMRP. Вместе с этим, источник B питания постоянного тока подключен к повышающему преобразователю 12 через системное реле SMRB, системное реле SMRP и сопротивление Rp. Затем источник B питания постоянного тока начинает предварительную зарядку конденсатора 13 через дроссель LI и диод D1 повышающего преобразователя 12.
Когда предварительная зарядка конденсатора 13 начинается в момент t3 времени, ток Ip предварительной зарядки резко возрастает и затем постепенно уменьшается, как показано кривой k3. Как показано кривой k9, напряжение VH постепенно увеличивается после момента t3 времени и достигает установленного напряжения Vchg предварительной зарядки в момент t4 времени.
После момента времени t3 устройство 30 управления определяет в отношении того, достигает ли напряжение VH с датчика 20 напряжения установленного напряжения Vchg предварительной зарядки, генерирует сигнал SEG на уровне H в момент t4 времени и выводит сигнал на системное реле SMRG и генерирует сигнал SEP на уровне L в момент t5 времени и выводит сигнал на системное реле SMRP. Сигнал SEG на уровне H может быть сгенерирован, когда определено, что временной интервал, позволяющий напряжению VH достигнуть напряжения Vchg предварительной зарядки, истек.
Когда сигнал SEG на уровне H выводится на системное реле SMRG в момент t4 времени, источник B питания постоянного тока подает постоянный ток на конденсатор 13 через системные реле SMRB, SMRG и таким образом предварительная зарядка конденсатора 13 заканчивается. То есть конденсатор 13 заряжается во время интервала с момента t3 времени до момента t4 времени. C конструкцией, как описано выше, системное реле SMRP выключается после того, как системное реле SMRG включено, что предотвращает бросок тока через конденсатор 13 и постоянное напряжение может подаваться от источника B питания постоянного тока на конденсатор 13.
Затем источник B питания постоянного тока подает постоянное напряжение Vb на конденсатор 13 через системные реле SMRB, SMRG и повышающий преобразователь 12, и конденсатор 13 сглаживает постоянное напряжение Vb от источника B питания постоянного тока и подает результат на обратные преобразователи 14, 31.
После этого устройство 30 управления генерирует сигнал PWMI1 (или PWMI2) на основе значения TR1 (или TR2), напряжения VH и тока мотора MCRT1 (или MCRT2) и выводит сигнал на n-p-n транзисторы Q3-Q8.
Затем обратный преобразователь 14 (или 31) преобразует постоянное напряжение от конденсатора 13 в переменное напряжение в ответ на сигнал PWMI1 (или PWMI2) для приведения в действие мотора-генератора MG1 (или MG2). Когда устройство 100 привода мотора приводит в действие мотор-генератор MG1 (или MG2), обратный преобразователь 14 (или 31) также преобразует переменное напряжение, генерируемое мотором-генератором MG1 (или MG2), в постоянное напряжение в ответ на сигнал PWMI1 (или PWMI2) для зарядки источника B питания постоянного тока.
После этого, когда устройство 30 управления принимает сигнал IG на уровне L от ключа зажигания в момент t6 времени при прекращении работы системы транспортного средства, устройство 30 управления генерирует сигнал SEG на уровне L в момент t7 времени и выводит сигнал на системное реле SMRG. Вместе с этим, системное реле SMRG выключается. С другой стороны, системное реле SMRB сохраняется во включенном состоянии, пока не паступает момент t8 времени, в который сигнал SEB переключается на уровень L.
Кроме того, в момент t7 времени устройство 30 управления генерирует сигналы PWMI1, PWMI2 для открытия всех n-p-n транзисторов Q3-Q8 и выводит сигналы на n-p-n транзисторы Q3-Q8 обратных преобразователей 14, 31. В ответ на открытие n-p-n транзисторов Q3-Q8 обратного преобразователя 14 (или 31) энергия, накопленная конденсатором 13, потребляется моторами-генераторами MG1, MG2 и начинается разрядка конденсатора 13. Эта разрядка конденсатора 13 выполняется приведением в действие моторов-генераторов MG1, MG2 с так называемым безмоментным управлением, то есть потребление энергии без образования момента.
Если системное реле SMRG не спаяно, когда начата разрядка конденсатора 13, поскольку конденсатор 13 электрически отделен от источника B питания постоянного тока системным реле SMRG в выключенном состоянии, конденсатор 13 не может принимать подачу энергии от источника B питания постоянного тока и напряжение VH между его обоими концами постепенно уменьшается.
С другой стороны, если системное реле SMRG спаяно, конденсатор 13 электрически связан с источником B питания постоянного тока через системное реле SMRG и заряжается посредством получения подачи энергии от источника B питания постоянного тока. Следовательно, напряжение VH между обоими концами конденсатора 13 не уменьшается с разрядом и поддерживается на уровне Vchg напряжения предварительной зарядки (по существу, соответствующем уровню Vb напряжения постоянного тока).
Следовательно, устройство 30 управления определяет спаивание системного реле SMRG на основе напряжения VH между обоими концами конденсатора 13 во время разрядки конденсатора 13, которая выполняется при прекращении работы системы транспортного средства. Подробно, устройство 30 управления определяет в отношении того, спаяно ли системное реле SMRG или нет, на основе напряжения VH с датчика 20 напряжения в интервале времени TG после момента t7 времени.
Устройство 30 управления определяет, что системное реле SMRG спаяно, когда после выключения системного реле SMRG в момент t7 времени датчик 20 напряжения обнаруживает напряжение VH, как показано кривой k10, которое временно уменьшается, но только меняется в установленном диапазоне напряжений. С другой стороны, устройство 30 управления определяет, что системное реле SMRG не спаяно в период TG, датчик 20 напряжения обнаруживает напряжение VH, как показано кривой k11, которое постепенно уменьшается и идет ниже установленного диапазона напряжений. Установленный диапазон напряжений назначен так, чтобы иметь напряжение Vchg предварительной зарядки (≈постоянному напряжению Vb) в качестве среднего значения и включать ошибку A определения датчика 20 тока, как показано линией с длинными и короткими штрихами на чертеже.
Когда определено, что системное реле SMRG не спаяно в интервале времени TG, устройство 30 управления генерирует сигнал SEB уровня H в момент t8 времени и выводит сигнал на системное реле SMRB. Вместе с этим, системное реле SMRB включается. Напряжение VH между обоими концами конденсатора 13 уменьшается, по существу, до нулевого уровня в ответ на завершение разрядки.
После этого устройство 30 управления только генерирует сигнал SEP на уровне H в момент t9 времени и выводит сигнал на системное реле SMRP и только генерирует сигнал SEP на уровне L в момент t10 времени и выводит сигнал на системное реле SMRP. То есть устройство 30 управления включает системное реле SMRP во время временного интервала TB от момента t9 времени до момента t10 времени.
Затем устройство 30 управления определяет в отношении того, спаяно ли системное реле SMRB или нет, на основе напряжения VH с датчика 20 напряжения в интервале времени TB c момента t9 времени до момента t10 времени.
Подробно, устройство 30 управления определяет, что системное реле SMRB спаяно, когда после момента t9 времени, в который включено только системное реле SMRP, датчик 20 напряжения обнаруживает напряжение VH, как показано кривой k12, которое постепенно увеличивается за пороговым значением Vstd. С другой стороны, устройство 30 управления определяет, что системное реле SMRB не спаяно, когда датчик 20 напряжения обнаруживает напряжение не больше, чем пороговое значение Vstd, как показано кривой k13 во время интервала времени TB. Установленное пороговое значение Vstd задано имеющим нулевое напряжение, как опорный уровень, и включающим ошибку определения датчика 20 напряжения.
Как описано выше, согласно устройству управления источником питания настоящего изобретения, спаивание системного реле SMRP определяется при запуске системы транспортного средства и, когда определено, что системное реле SMRP не спаяно, спаивание системных реле SMRG, SMRB определяется при прекращении работы системы транспортного средства. Устройство управления источником питания построено имеющим такое устройство для последующих целей.
Первое, обращаясь к фиг.2, поскольку системное реле SMRP включено при запуске системы транспортного средства для предварительной зарядки конденсатора 13, спаивание его определяется до этой операции включения.
Затем, как описано ранее, спаяно ли системное реле SMRB или нет, может быть определено на основе напряжения VH между обоими концами конденсатора 13, обнаруженного датчиком 20 напряжения в интервале времени, в котором включено только системное реле SMRP. Подробно, устройство 30 управления определяет, что системное реле SMRB спаяно, когда датчик 20 напряжения обнаруживает напряжение VH, которое постепенно увеличивается в интервале времени до порогового значения Vstd. Следовательно, спаивание системного реле SMRB может также быть определено при запуске системы транспортного средства, исключая прекращение работы системы транспортного средства. Определение спаивания на основе напряжения VH между обоими концами конденсатора 13, однако, требует длительного времени, поскольку требуется время перехода, определяемое произведением значения C емкости конденсатора 13 и значения R сопротивления Rp, для увеличения напряжения VH. Поэтому определение спаивания системного реле SMRB при запуске системы транспортного средства является неблагоприятным, потому что время, требуемое для завершения запуска системы транспортного средства, становится большим. Следовательно, время, требуемое для запуска системы транспортного средства, может быть уменьшено конструкцией, в которой спаивание системного реле SMRB определяется при прекращении работы системы транспортного средства.
В конечном счете, поскольку системное реле SMRG находится на стороне анода источника B питания постоянного тока, как и системное реле SMRP, спаивание этого может быть определено на основе отклонения в напряжении VH между обоими концами конденсатора 13 после момента времени включения только системного реле SMRB. Характеристики перехода напряжения VH не могут наблюдаться, однако, поскольку не существует элемента сопротивления на пути тока от катода источника B питания постоянного тока через системное реле SMRB, конденсатор 13 и системное реле SMRG к аноду источника B питания постоянного тока. Поэтому спаивание системного реле SMRG определяется на основе отклонения в напряжении VH во время разряда конденсатора 13 при завершении работы системы транспортного средства.
По причинам, описанным выше, устройство управления источником питания настоящего изобретения определяет спаивание системного реле SMRP при запуске системы транспортного средства и, если системное реле SMRP не спаяно, определяет спаивание системных реле SMRG, SMRB при прекращении работы системы транспортного средства.
С другой стороны, согласно устройству управления источником питания настоящего изобретения, когда определено, что системное реле SMRP спаяно в интервале времени TP при запуске системы транспортного средства, запуск системы транспортного средства останавливается в этой точке и немедленно выполняется разряд конденсатора 13, как показано на фиг.2, после момента t7 времени. В этой ситуации, согласно фиг.2, системное реле SMRB постоянно находится во включенном состоянии, поскольку включено в ответ на сигнал SEP на уровне Н в момент t2 времени. Системное реле SMRG не включено в момент t4 времени и поддерживается в выключенном состоянии.
Теперь будет рассмотрена ситуация, в которой разрядка конденсатора начинается в то время, как системное реле SMRB включено, согласно временной диаграмме фиг.2, когда системное реле SMRP спаяно.
Поскольку системное реле SMRP спаяно, оба системных реле SMRB, SMRP включены. Следовательно, конденсатор 13 электрически связан с источником B питания постоянного тока через системное реле SMRB и системное реле SMRG и принимает подачу энергии от источника B питания постоянного тока. Соответственно, напряжение VH между обоими концами конденсатора 13 не уменьшается с разрядом и поддерживается на уровне Vchg напряжения предварительной зарядки (по существу, соответствующем уровню Vb напряжения постоянного тока).
В этой ситуации большой ток постоянно течет через сопротивление Rp, которое подключено последовательно к системному реле SMRP, поскольку энергия подается от источника B питания постоянного тока на конденсатор 13 в интервале времени TG. Сопротивление Rp, однако, изначально создано как сопротивление для предварительной зарядки конденсатора 13 и имеет технические требования, принимающие во внимание течение относительно малого тока Ip предварительной зарядки во время интервала времени, в котором напряжение VH между обоими концами конденсатора 13 изменяется от нуля до напряжения предварительной зарядки, а не для большого тока. Поэтому, если разрядка конденсатора 13 выполняется в то время, как системное реле SMRB включено, как на фиг.2, когда системное реле SMRP спаяно, сопротивление Rp может быть повреждено вследствие тепла, произведенного большим током.
Следует отметить, что когда системное реле SMRP спаяно, поскольку напряжение VH поддерживается, по существу, на уровне Vb постоянного напряжения, определение спаивания системного реле SMRG на основе напряжения VH становится невозможным. В дополнение, поскольку конденсатор 13 не разряжается в интервале времени TB, напряжение VH становится выше порогового значения Vstd и определение спаивания системного реле SMRB становится затруднительным.
То есть, когда спаивание системных реле SMRG, SMRB должно быть определено, как обычно при прекращении работы системы транспортного средства, когда системное реле SMRP спаяно, к сопротивлению Rp прикладывается чрезмерная нагрузка и точное определение спаивание не может быть выполнено.
Следовательно, устройство управления источником питания согласно настоящему изобретению имеет такое устройство, при котором определено, что системное реле SMRP спаяно при запуске системы транспортного средства, системное реле SMRB немедленно выключается без определения спаивания системных реле SMRG, SMRB и конденсатор 13 разряжается в то время, как системное реле SMRB выключено.
Вместе с этим, системное реле SMRB уже выключено и подача энергии от источника B питания постоянного тока на конденсатор 13 остановлена, когда разрядка конденсатора 13 начата. Следовательно, протекание большого тока через сопротивление Rp предотвращается и повреждение сопротивления Rp можно избежать.
Более того, устройство управления источником питания согласно настоящему изобретению имеет такое устройство, при котором определено, что системное реле SMRP спаяно, спаивание системного реле SMRB определяется на основе напряжения VH с датчика 20 напряжения во время разрядки конденсатора 13, которая выполняется после выключения системного реле SMRB.
Вместе с этим, спаивание системных реле SMRP и SMRB может быть определено вместе с защитой сопротивления Rp от большого тока.
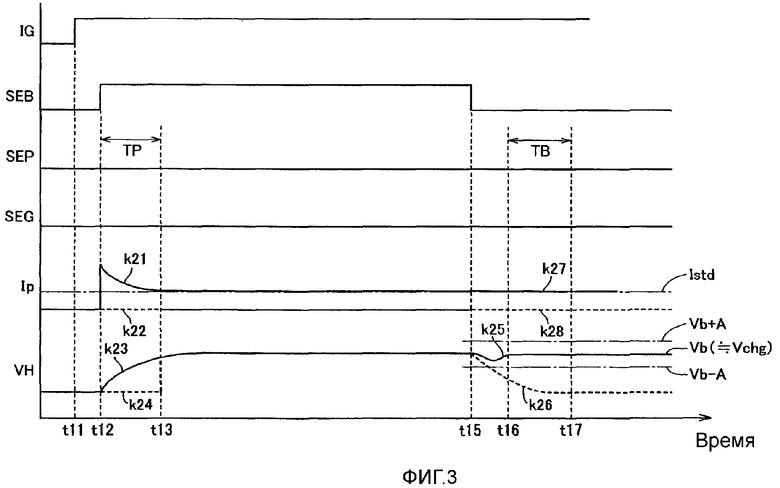
Фиг.3 - временная диаграмма для описания процесса определения спаивания системных реле SMRP и SMRB.
Обращаясь к фиг.3, когда сигнал IG от внешнего ECU переключается с уровня L на уровень H в момент t11 времени с включением ключа зажигания, устройство 30 управления только генерирует сигнал SEB на уровне H в момент t12 времени и выводит сигнал на системное реле SMRB.
Во время интервала TP с момента t2 времени до момента t3 времени устройство 30 управления определяет в отношении того, является ли системное реле SMRP спаянным или нет, на основе тока Ip предварительной зарядки от датчика 26 тока. Как описано касательно фиг.2, устройство 30 управления определяет, что системное реле SMRP спаяно, когда после момента t12 времени, в который включено только системное реле SMRB, датчик 26 тока обнаруживает ток Ip предварительной зарядки, как показано кривой k21, который резко увеличивается за опорным значением Istd и затем уменьшается. С другой стороны, устройство 30 управления определяет, что системное реле SMRP не спаяно, когда датчик 26 тока обнаруживает нулевой ток Ip предварительной зарядки, как показано прямой линией k22 во время интервала TP.
Когда определено, что системное реле SMRP спаяно, устройство 30 управления останавливает запуск системы транспортного средства и выполняет разрядку конденсатора 13 согласно процедуре, описанной ниже. Когда определено, что системное реле SMRP не спаяно, устройство 30 управления выполняет предварительную зарядку конденсатора 13, после этого приводит в действие систему транспортного средства и определяет спаивание системных реле SMRG, SMRB при прекращении работы системы транспортного средства, согласно процедуре, описанной касательно фиг.2.
Обращаясь к фиг.3, сначала устройство 30 управления генерирует сигнал SEP на уровне L в момент t15 времени и выводит сигнал на системное реле SMRB. Вместе с этим, системное реле SMRB выключается. То есть посредством выключения системного реле SMRB источник B питания постоянного тока и конденсатор 13 электрически разделены друг с другом и подача энергии от источника B питания постоянного тока на конденсатор 13 остановлена.
Кроме того, в момент t7 времени устройство 30 управления генерирует сигналы PWMI1, PWMI2 для включения всех n-p-n транзисторов Q3-Q8 и выводит сигналы на n-p-n транзисторы Q3-Q8 обратных преобразователей 14, 31. В ответ на открытие n-p-n транзисторов Q3-Q8 обратного преобразователя 14 (или 31) энергия, накопленная конденсатором 13, потребляется моторами-генераторами MG1, MG2 и начинается разрядка конденсатора 13. Как описано выше, разрядка конденсатора 13 выполняется приведением в действие мотора-генератора MG1, MG2 с безмоментным управлением.
Если системное реле SMRB не спаяно, когда начата разрядка конденсатора 13, поскольку конденсатор 13 электрически отделен от источника B питания постоянного тока системным реле SMRB в выключенном состоянии, конденсатор 13 не может принимать подачу энергии от источника B питания постоянного тока и напряжение VH постепенно уменьшается.
С другой стороны, если системное реле SMRB спаяно, конденсатор 13 электрически связан с источником B питания постоянного тока через системное реле SMRB и системное реле SMRP и заряжается посредством получения подачи энергии от источника B питания постоянного тока. Соответственно, напряжение VH между обоими концами конденсатора 13 не уменьшается с разрядом и поддерживается на уровне Vchg напряжения предварительной зарядки (соответствующем уровню Vb напряжения постоянного тока).
Следовательно, устройство 30 управления определяет спаивание системного реле SMRB на основе напряжения VH между обоими концами конденсатора 13 во время разрядки конденсатора 13, которая выполняется при прекращении работы системы транспортного средства. Подробно, устройство 30 управления определяет в отношении того, спаяно ли системное реле SMRB или нет, на основе напряжения VH с датчика 20 напряжения в интервале времени TB с момента t16 времени до момента t17 времени.
Устройство 30 управления определяет, что системное реле SMRB спаяно, когда после выключения системного реле SMRB в момент t15 времени датчик 20 напряжения обнаруживает напряжение VH, как показано кривой k25, которое временно уменьшается, но только меняется в установленном диапазоне напряжений. С другой стороны, устройство 30 управления определяет, что системное реле SMRB не спаяно, в интервале времени TB, датчик 20 напряжения обнаруживает напряжение VH, как показано кривой k26, которое постепенно уменьшается и идет ниже установленного диапазона напряжений. Установленный диапазон напряжений назначен так, чтобы иметь напряжение Vchg предварительной зарядки (≈постоянному напряжению Vb) в качестве среднего значения и включать ошибку A определения датчика 20 тока, как показано линией с длинными и короткими штрихами на чертеже.
Вместе с этим, когда системное реле SMRP спаяно, системное реле SMRB сперва выключено и разрядка конденсатора 13 выполняется в то время, как конденсатор 13 и источник B питания постоянного тока электрически отделены друг от друга. Поэтому сопротивление Rp, подключенное последовательно к системному реле SMRP, может быть защищено от большого тока и надежность устройства управления источником питания может быть увеличена. Более того, спаивание системного реле SMRB может быть обнаружено на основе напряжения VH между обоими концами разряженного конденсатора 13.
Следует отметить, что спаивание системного реле SMRB может также быть определено в интервале времени TB на основе тока Ip предварительной зарядки с датчика 26 тока. Более точно, устройство 30 управления определяет, что системное реле SMRB спаяно, когда в интервал времени TB после момента времени t15, в который системное реле SMRB выключено, датчик 26 тока обнаруживает ток Ip предварительной зарядки по меньшей мере опорного значения, как показано кривой k27. С другой стороны, устройство 30 управления определяет, что системное реле SMRB не спаяно, когда датчик 26 тока обнаруживает ток Ip предварительной зарядки ниже, чем опорное значение, как показано кривой k28 во время интервала TB.
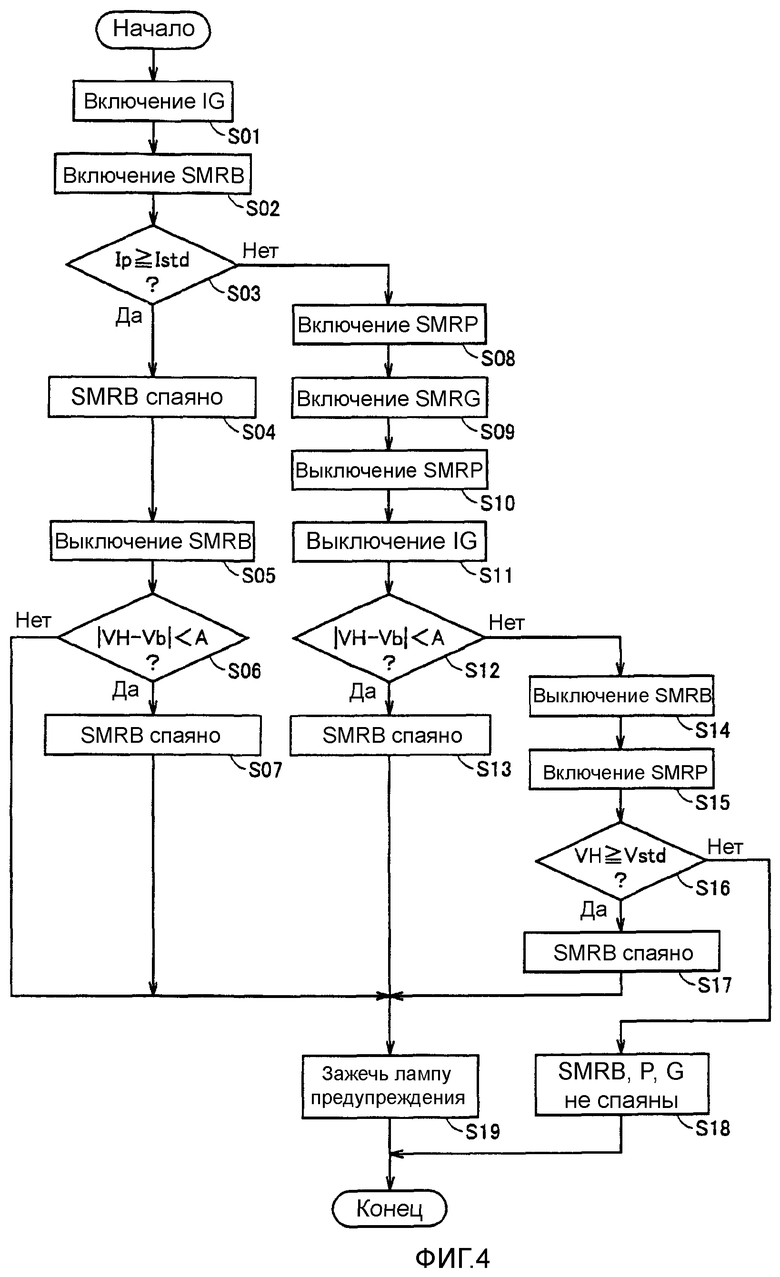
Фиг.4 - блок схема для описания процесса определения спаивания системных реле SMRB, SMRP и SMRG, показанных на фиг.1.
Обращаясь к фиг.4, когда запускается последовательность действий, ключ IG зажигания включен (шаг S01). Затем устройство 30 управления генерирует сигнал SEB на уровне H и выводит сигнал на системное реле SMRB для включения только системного реле SMRB (шаг S02). После этого устройство 30 управления принимает ток Ip предварительной зарядки с датчика 26 тока и определяет, является ли принятый ток Ip предварительной зарядки по меньшей мере значения Istd или нет (шаг S03).
Если ток Ip предварительной зарядки ниже, чем опорное значение Istd на шаге S03, устройство 30 управления определяет, что системное реле SMRP в нормальном состоянии (не спаяно), генерирует сигнал SEP на уровне H и выводит сигнал на системное реле SMRP для включения системного реле SMRP (шаг S08). Вместе с этим, источник B питания постоянного тока подключен к обоим концам конденсатора 13 через системное реле SMRB, системное реле SMRP и сопротивление Rp и начинает предварительную зарядку конденсатора 13.
Когда напряжение VH между обоими концами конденсатора 13 достигает напряжения Vchg предварительной зарядки, устройство 30 управления генерирует сигнал SEG на уровне H и выводит сигнал на системное реле SMRG. Вместе с этим, системное реле SMRG включено и предварительная зарядка конденсатора 13 завершена (наг S09). Затем устройство 30 управления генерирует сигнал SEP на уровне L и выводит сигнал на системное реле SMRP для выключения только системного реле SMRP (шаг S10).
Затем, когда ключ IG зажигания выключен при прекращении работы системы транспортного средства (шаг S11), устройство 30 управления открывает n-p-n транзисторы Q3-Q8 обратных преобразователей 14, 31 для приведения моторов-генераторов MG1, MG2 и выполняет разрядку конденсатора 13. В этой ситуации устройство 30 управления постоянно устанавливает системное реле SMRB во включенное состояние с шага S02.
Затем устройство 30 управления определяет в отношении того, является ли напряжение VH между обоими концами конденсатора 13 в границах установленного диапазона напряжений или нет (шаг S12). Более точно, устройство 30 управления определяет в отношении того, является ли абсолютное значение разницы напряжений между напряжением VH и постоянным напряжением Vb (|VH-Vb|) меньшим, чем ошибка A обнаружения датчика 20 напряжения, или нет.
Когда абсолютное значение разницы напряжений |VH-Vb| меньше, чем ошибка A обнаружения датчиков 20 напряжения, то есть когда напряжение VH, по существу, на уровне Vb постоянного напряжения, устройство 30 управления определяет, что системное реле SMRG спаяно (шаг S13).
С другой стороны, на шаге S12, когда абсолютное значение разницы напряжений |VH-Vb| не менее, чем ошибка A обнаружения датчика 20 напряжения, то есть когда напряжение VH не на уровне Vb постоянного напряжения, определяется, что системное реле SMRG в нормальном состоянии (не спаяно). Устройство 30 управления генерирует сигнал SEB на уровне L и выводит сигнал на системное реле SMRB для выключения только системного реле SMRB (шаг S14). Устройство 30 управления генерирует сигнал SEP на уровне H и выводит сигнал на системное реле SMRP для включения системного реле SMRP (шаг S15). Затем устройство 30 управления принимает напряжение VH с датчика 20 напряжения и определяет в отношении того, является ли принятое напряжение VH по меньшей мере пороговым значением Vstd или нет.
Когда напряжение VH является по меньшей мере пороговым значением Vstd, устройство 30 управления определяет, что системное реле SMRB спаяно (шаг S17). C другой стороны, на шаге S16, когда напряжение VH ниже, чем пороговое значение Vstd, устройство 30 управления определяет, что системное реле SMRB в нормальном состоянии (не спаяно). То есть устройство 30 управления определяет, что все системные реле SMRP, SMRG, SMRB в нормальном состоянии не спаяны (шаг S18) и завершает последовательность операций.
Возвращаясь к шагу S03, когда ток Ip предварительной зарядки имеет по меньшей мере опорное значение Istd, устройство 30 управления определяет, что системное реле SMRP спаяно (шаг S04). Когда определено, что системное реле SMRP спаяно, устройство 30 управления генерирует сигнал SEB на уровне L и выводит сигнал на системное реле SMRB для выключения системного реле SMRB (шаг S05).
Затем устройство 30 управления открывает n-p-n транзисторы Q3-Q8 обратных преобразователей 14, 31 для привода моторов-генераторов MG1, MG2 и выполняет разрядку конденсатора 13. В этой ситуации устройство 30 управления определяет в отношении того, является ли напряжение VH между обоими концами конденсатора 13 в границах установленного диапазона напряжений или нет (шаг S06). Более точно, устройство 30 управления определяет в отношении того, является ли абсолютная величина разницы напряжений между напряжением VH и постоянным напряжением Vb (|VH-Vb|) меньшим, чем ошибка A обнаружения датчика 20 напряжения, или нет.
Когда абсолютное значение разницы напряжений |VH-Vb| меньше, чем ошибка A обнаружения датчика 20 напряжения, то есть когда напряжение VH, по существу, на уровне Vb постоянного напряжения, устройство 30 управления определяет, что системное реле SMRB спаяно (шаг S07). В этой ситуации устройство 30 управления определяет, что системные реле SMRP и SMRB спаяны.
С другой стороны, на шаге S06, когда абсолютное значение разницы напряжений |VH-Vb| не менее, чем ошибка A обнаружения датчика 20 напряжения, то есть когда напряжение VH не на уровне Vb постоянного напряжения, устройство 30 управления определяет, что системное реле SMRB в нормальном состоянии (не спаяно). В этой ситуации устройство 30 управления определяет, что только системное реле SMRP спаяно.
После каждого из шагов S07, S13 и S17 устройство 30 управления генерирует сигнал EMG и выводит сигнал на лампу 40 предупреждения. Лампа 40 предупреждения зажигается в ответ на сигнал EMG (шаг S19). В этой ситуации устройство 100 привода мотора не запущено.
Как описано выше, когда определено, что системное реле SMRP спаяно при запуске системы транспортного средства, запуск системы транспортного средства останавливается, спаивание системных реле SMRG, SMRB не определяется, системное реле SMRB немедленно выключается и затем разрядка конденсатора 13 выполняется, вследствие чего сопротивление Rp может быть защищено от большого тока. В дополнение, спаивание системного реле SMRB может быть определено на основе напряжения VH между обоими концами конденсатора 13 или тока Ip предварительной зарядки во время разрядки.
Следует отметить, что операции по определению спаивания системных реле SMRB, SMRP, SMRG устройством 30 управления фактически выполняются ЦПУ (центральное процессорное устройство). ЦПУ читает программу, включающую каждый шаг, показанный на чертеже из ПЗУ (постоянное запоминающее устройство), и выполняет каждый шаг, показанный на фиг.4, для определения спаивания системных реле SMRB, SMRP, SMRG.
Поэтому ПЗУ соответствует машиночитаемому (ЦПУ) носителю записи, записывающему программу для предоставления возможности компьютеру (ЦПУ) выполнять управление для определения спаивания системных реле SMRB, SMRP, SMRG.
В дополнение, в настоящем изобретении системные реле SMRB, SMRP, SMRG, сопротивление Rp, датчик 26 тока, конденсатор 13, датчик 20 напряжения и устройство 30 управления создают "устройство управления источником питания" согласно настоящему изобретению. Устройство 30 управления, определяющее спаивание системных реле SMRB, SMRP, SMRG, создает "определяющую часть". В настоящем изобретении обратные преобразователи и моторы-генераторы MG1, MG2 создают "нагрузку".
Промышленная применимость
Настоящее изобретение применяется для устройства управления источником питания, способного к определению спаивания реле одновременно с защитой сопротивления.
Устройство (30) управления определяет, что системное реле для предварительной зарядки (SMRP) спаяно, когда после генерации сигнала (SEB) на уровне Н при запуске системы транспортного средства для включения только системного реле (SMRB) катодной стороны ток Ip предварительной зарядки имеет опорное значение. Когда определено, что системное реле для предварительной зарядки (SMRP) спаяно, устройство (30) управления немедленно выключает системное реле (SMRB) катодной стороны без определения спаивания системных реле катодной и анодной стороны (SMRG, SMRB) и выполняет разрядку конденсатора (13). В этой ситуации устройство управления (30) определяет спаивание системного реле (SMRB) катодной стороны на основе напряжения (VH) между обоими концами конденсатора (13). Когда определено, что системное реле для предварительной зарядки (SMW) не спаяно, спаивание системных реле (SMRG, SMRB) определяется при прекращении работы системы транспортного средства. Технический результат - повышение надежности. 2 с. и 14 з.п. ф-лы, 4 ил.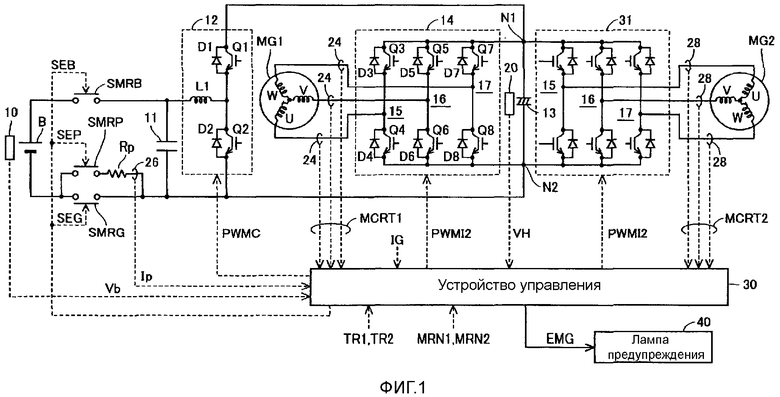
первое реле и сопротивление, подключенные последовательно между анодом источника питания постоянного тока и нагрузкой;
второе реле, подключенное между анодом упомянутого источника питания постоянного тока и упомянутой нагрузкой параллельно упомянутым первому реле и сопротивлению, подключенными последовательно;
третье реле, подключенное между катодом упомянутого источника питания постоянного тока и упомянутой нагрузкой;
датчик тока, обнаруживающий постоянный ток, текущий через упомянутое сопротивление;
емкостной элемент, имеющий один вывод, подключенный к стороне катода упомянутого источника питания постоянного тока через упомянутое третье реле, и другой вывод, подключенный к стороне анода упомянутого источника питания постоянного тока через упомянутое первое реле и сопротивление, подключенные последовательно, и упомянутое второе реле для подачи энергии, подаваемой от упомянутого источника питания на упомянутую нагрузку;
датчик напряжения, обнаруживающий напряжение между обоими концами упомянутого емкостного элемента; и
определяющую часть, определяющую спаивание упомянутых реле с первого по третье; где упомянутая определяющая часть включает
первую определяющую часть, определяющую спаивание упомянутого первого реле на основе постоянного тока, обнаруженного упомянутым датчиком тока,
вторую определяющую часть, определяющую спаивание каждого из упомянутых второго и третьего реле на основе напряжения, обнаруженного упомянутым датчиком напряжения в каждой из ситуаций, в которых только упомянутое третье реле приведено в проводящее состояние и только упомянутое первое реле приведено в проводящее состояние согласно установленному образцу после выполнения упомянутой первой определяющей части, и
останавливающую определение часть, останавливающую выполнение упомянутой второй определяющей части, когда упомянутая первая определяющая часть определяет, что упомянутое первое реле спаяно.
упомянутая останавливающая определяющая часть включает в себя часть источника питания, приводящая упомянутые второе и третье реле в непроводящее состояние для подачи энергии от упомянутого емкостного элемента на упомянутую нагрузку.
первое реле и сопротивление, подключенные последовательно между анодом источника питания постоянного тока и нагрузкой;
второе реле, подключенное между анодом упомянутого источника питания постоянного тока и упомянутой нагрузкой параллельно упомянутому первому реле и сопротивлению, подключенным последовательно;
третье реле, подключенное между катодом упомянутого источника питания постоянного тока и упомянутой нагрузкой;
датчик тока, обнаруживающий постоянный ток, текущий через упомянутое сопротивление;
емкостной элемент, имеющий один вывод подключенный к стороне катода упомянутого источника питания постоянного тока через упомянутое третье реле, и другой вывод подключенный к стороне анода упомянутого источника питания постоянного тока через упомянутое первое реле и сопротивление подключенные последовательно и упомянутое второе реле для подачи энергии, подаваемой от упомянутого источника питания на упомянутую нагрузку;
датчик напряжения, обнаруживающий напряжение между обоими концами упомянутого емкостного элемента; и
определяющую часть, определяющую спаивание упомянутых с первого по третье реле; где упомянутая определяющая часть включает первые определяющие средства для определения спаивания упомянутого первого реле, основанного на постоянном токе, обнаруженным упомянутым датчиком тока,
вторые определяющие средства, определяющие спаивание каждого из упомянутых второго и третьего реле на основе напряжения, обнаруженного упомянутым датчиком напряжения, в каждой из ситуаций, в которых только упомянутое третье реле приведено в проводящее состояние, и только упомянутое первое реле приведено в проводящее состояние, согласно установленному образцу после выполнения упомянутых первых определяющих средств, и
останавливающие определение средства, останавливающие выполнение упомянутых вторых определяющих средств, когда упомянутые первые определяющие средства определяют, что упомянутое первое реле спаяно.
упомянутые вторые определяющие средства включают средства для определения спаивания упомянутого второго реле на основе напряжения, обнаруженного упомянутым датчиком напряжения, когда только упомянутое третье реле приведено в проводящее состояние для подачи энергии от упомянутого емкостного элемента на упомянутую нагрузку, и
упомянутые останавливающие определение средства включают средства для приведения упомянутых второго и третьего реле в непроводящее состояние для подачи энергии от упомянутого емкостного элемента на упомянутую нагрузку.
упомянутые останавливающие определение средства дополнительно включают в себя третьи определяющие средства для определения спаивания упомянутого третьего реле на основе постоянного тока, обнаруженного упомянутым датчиком тока, когда
упомянутые второе и третье реле приведены в непроводящее состояние для подачи энергии от упомянутого емкостного элемента на упомянутую нагрузку.
средства для определения, что упомянутое второе реле спаяно, когда упомянутый датчик напряжения обнаруживает напряжение вне установленного диапазона напряжений, когда только упомянутое третье реле приведено в проводящее состояние для подачи энергии от емкостного элемента на нагрузку, и
средства для определения, что упомянутое третье реле спаяно, когда упомянутый датчик напряжения обнаруживает напряжение по меньшей мере пороговой величины, когда только упомянутое первое реле приведено в проводящее состояние для подачи энергии от упомянутого емкостного элемента на упомянутую нагрузку.
| JP 2000134707 A, 12.05.2000 | |||
| JP 2004303691 A, 28.10.2004 | |||
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ИСПРАВНОСТИ МАКСИМАЛЬНЫХ ЗАЩИТ ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2199788C2 |

