Введение
Данное изобретение относится к системе электропривода и, главным образом, к системе электропривода, управляющей приводом электродвигателя переменного тока посредством управления с обратной связью по току электродвигателя.
Описание предшествующего уровня техники
Типичная система электропривода, как известно, состоит из перезаряжаемого источника питания постоянного тока, инвертора и электродвигателя переменного тока. Эта система конфигурируется следующим образом. При работе электродвигателя переменного тока мощность, подаваемая от источника питания постоянного тока, приводит в действие и управляет электродвигателем переменного тока таким образом, что мощность может двунаправленно подаваться и приниматься между источником питания постоянного тока, инвертором и электродвигателем переменного тока. Также при работе электродвигателя переменного тока в режиме рекуперации инвертор преобразует поступающую от электродвигателя переменного тока рекуперативную мощность в напряжение постоянного тока, которое может использоваться для зарядки источника питания постоянного тока.
В такой системе электропривода электродвигатель переменного тока может генерировать мощность, превышающую потребности нагрузки (источника питания постоянного тока), т.е. генерировать избыточную мощность. В этом случае чрезмерно большая рекуперативная мощность может вызвать перенапряжение внутри системы электропривода. Таким образом, требуется структура управления, которая при необходимости увеличивает потребление мощности электродвигателем переменного тока и тем самым гасит генерируемую мощность на входе.
В этой связи Japanese Patent Laying-Open № 2005-102385 (Патентный Документ 1) раскрывает структуру управления для снижения рекуперативной мощности. Эта структура управления накладывает высокочастотные гармоники на значения команды по току по осям «d» и «q» и тем самым увеличивает высокочастотные гармоники тока, протекающего через электродвигатель переменного тока. Эта структура увеличивает потери в магнитной системе электродвигателя переменного тока, тем самым снижается КПД привода таким образом, что рекуперативная мощность от электродвигателя переменного тока гасится. Таким образом, при работе электродвигателя переменного тока в режиме рекуперации становится возможным гасить повышение напряжения постоянного тока (контактное напряжение постоянного тока) на входе инвертора.
Тем не менее, Патентный Документ 1 не раскрывает структуру управления, которая заставляет выходной крутящий момент следовать за значением команды крутящему моменту, когда значение команды крутящему моменту изменяется в процессе управления потреблением рекуперативной мощности, как описано выше.
Дополнительно, в структуре управления, раскрытой в Патентном Документе 1, после добавления высокочастотных гармоник к току электродвигателя величина потребления мощности непрерывно изменяется за исключительно короткие промежутки времени и работа системы управления в целом может стать нестабильной. Поэтому величина высокочастотного тока, которая может накладываться, т.е. величина потери мощности в электродвигателе может повышаться только в ограниченных пределах с учетом стабилизации управления электродвигателем переменного тока. Соответственно, сложно обеспечить возможность потребления значительной избыточной мощности при сохранении управляемости крутящего момента электродвигателя переменного тока.
Сущность изобретения
Изобретение было сделано для преодоления указанных выше проблем, и целью изобретения является создание системы электропривода со структурой управления, которая может потреблять избыточную мощность при выполнении следящего управления крутящим моментом без создания нестабильности в управлении электродвигателя.
В соответствии с данным изобретением система электропривода сформирована для приведения в действие электродвигателя переменного тока и включает в себя контур электропривода и средство управления электродвигателем для управления работой контура электропривода. Контур электропривода выполнен с возможностью двунаправленно подавать и получать мощность к и от электродвигателя переменного тока и подводить мощность привода к электродвигателю переменного тока. Средство управления электродвигателем выполняет режим потребления избыточной мощности, определенной в зависимости от состояния системы электропривода, и выполняет следящий режим, при котором выходной крутящий момент следует за изменением значения команды крутящему моменту, при этом режим потребления сохраняется, когда значение команды крутящему моменту к электродвигателю переменного тока меняется во время режима потребления.
В соответствии с представленной системой электропривода режим потребления может потреблять избыточную мощность электродвигателя переменного тока. Дополнительно, даже при изменении значения команды крутящему моменту к электродвигателю переменного тока при режиме потребления может выполняться управление выходным крутящим моментом, который следует за изменением в значении команды при сохранении режима потребления. Таким образом, даже если крутящий момент, требуемый электродвигателю переменного тока, изменяется, выходной крутящий момент может следовать за значением команды крутящему моменту, а избыточная мощность может потребляться, когда это необходимо (например, когда электродвигатель переменного тока внезапно генерирует большое количество мощности). Следовательно, при сохранении контроля над крутящим моментом электродвигателя переменного тока система электропривода может предотвратить появление перенапряжения в системе, которое может быть вызвано рекуперативной мощностью от электродвигателя переменного тока. Дополнительно, избыточная мощность может потребляться либо при рекуперации, либо при работе под нагрузкой), т.е. независимо от рабочего состояния электродвигателя переменного тока.
Предпочтительно в представленной в изобретении системе электропривода средство управления электродвигателем приводит в действие электродвигатель переменного тока, относительно снижая фазой тока КПД привода в соответствии с увеличением определенной избыточной мощности в режиме потребления.
В соответствии с представленной системой электропривода, поскольку избыточная мощность электродвигателя переменного тока потребляется за счет изменения фазы тока электродвигателя, вероятность появления нестабильности в управлении электродвигателем ниже по сравнению со структурой управления, которая потребляет избыточную мощность наложением высокочастотных гармоник на ток электродвигателя. Таким образом, имеется возможность уменьшить запас параметров конденсатора, что, в свою очередь, снижает стоимость изготовления, а также имеется возможность обеспечить большую избыточную мощность, которая может быть потреблена электродвигателем переменного тока.
Предпочтительно в системе электропривода согласно изобретению средство управления электродвигателем имеет средство оценки мощности для оценки мощности, генерируемой электродвигателем переменного тока, основанной на угловой скорости вращения электродвигателя переменного тока и значении команды крутящему моменту, и определяет избыточную мощность, потребляемую в режиме потребления в соответствии с оценкой генерируемой мощности, произведенной средством оценки мощности.
Система электропривода, представленная выше, производит оценку генерируемой мощности на основании угловой скорости вращения электродвигателя переменного тока и значения команды крутящему моменту и поэтому может легко и надежно захватить избыточную мощность в электродвигатель переменного тока.
Предпочтительно в системе электропривода согласно изобретению контур электропривода выполнен с возможностью подачи и получения мощности двунаправленно к и от перезаряжаемого источника питания постоянного тока. Система электропривода дополнительно включает в себя детектор напряжения, который определяет присутствие напряжения в межсоединении, электрически соединяющем вместе контур электропривода и источника питания постоянного тока. Средство управления электродвигателем определяет избыточную мощность, потребляемую в режиме потребления, в соответствии с напряжением, определенным детектором напряжения.
В соответствии с описанием представленной выше системы электропривода, когда избыточная рекуперативная мощность от электродвигателя переменного тока повышает напряжение (контактное напряжение постоянного тока) в межсоединении между контуром электропривода и источником напряжения постоянного тока, потребление избыточной мощности в двигателе переменного тока может быть увеличено для гашения рекуперативной мощности от электродвигателя переменного тока. Таким образом, появление перенапряжения в системе электропривода может быть надежно предотвращено.
Предпочтительно в системе электропривода согласно изобретению электродвигатель переменного тока устанавливается на транспортном средстве, и выходной вал электродвигателя переменного тока соединен с колесом транспортного средства для передачи крутящего момента. Дополнительно средство управления электродвигателя определяет избыточную мощность, которая должна быть потреблена режимом потребления, в соответствии с силой торможения, необходимой транспортному средству.
В представленной выше системе электропривода, когда электродвигатель переменного тока используется как приводной электродвигатель транспортного средства, потребление избыточной мощности в электродвигателе переменного тока может увеличить момент инерции в соответствии с силой торможения, необходимой транспортному средству. Таким образом, водитель может получить более надежное ощущение при торможении благодаря эффекту снижения скорости вращения электродвигателя переменного тока в соответствии с возрастанием момента инерции. Дополнительно, сила торможения транспортного средства может быть создана даже в отсутствие рекуперативного тормоза в электродвигателе переменного тока по причине ограничений зарядки на входе или по подобной причине. Следовательно, возможно улучшить ощущение вождения и возможности торможения транспортного средства, оборудованного системой электропривода.
Предпочтительно в системе электропривода согласно изобретению средство управления электродвигателем имеет средство запоминания характеристик и создает команду по току в соответствии со значением команды крутящему моменту и определенной избыточной мощностью на основании корреляции, сохраняемой в средстве запоминания характеристик. Средство запоминания характеристик предварительно запоминает корреляцию между значением команды крутящему моменту и командой по току, соответствующую потреблению избыточной мощности той же величины в электродвигателе переменного тока.
В представленной выше системе электропривода на основании предварительно сохраненной корреляции команда по току может обусловить выдачу электродвигателем переменного тока крутящего момента в соответствии со значением команды крутящему моменту и потребление избыточной мощности, и эта команда по току может меняться непрерывно, даже когда происходят изменения в значении команды крутящему моменту и/или избыточной мощности, которая должна потребляться. Поэтому следящий контроль выходного крутящего момента электродвигателя переменного тока может производиться, даже когда значение команды крутящему моменту изменяет режим потребления избыточной мощности.
Предпочтительно в системе электропривода согласно изобретению средство управления электродвигателем включает в себя средство задания увеличения потери, средство создания команды по току и средство управления током. Средство задания увеличения потери задает команду потери в электродвигателе, указывающую потерю мощности, которая должна быть увеличена в двигателе переменного тока в соответствии с определенной избыточной мощностью. Средство создания команды по току создает команду по току для тока, проходящего через электродвигатель переменного тока в соответствии со значением команды крутящему моменту электродвигателя переменного тока и командой потери в электродвигателе, определенной средством задания увеличения потери. Средство управления током управляет работой контура электропривода для генерирования тока электродвигателя в соответствии с командой по току, создаваемой средством создания команды по току. Дополнительно средство создания команды по току создает команду по току таким образом, что выходной крутящий момент электродвигателя переменного тока совпадает со значением команды крутящему моменту, а КПД привода электродвигателя переменного тока относительно снижается в соответствии с возрастанием потери мощности, которая вызвана командой потери в электродвигателе.
В представленной выше системе электропривода, в которой средство управления током управляет электродвигателем переменного тока посредством управления с обратной связью по току электродвигателя, значение команды (значение команды по току) управления током электродвигателя устанавливается на создание потери мощности в электродвигателе переменного тока в соответствии с командой потери в электродвигателе, и таким образом может выполняться режим потребления произвольной избыточной мощности. Поэтому, даже когда крутящий момент, запрашиваемый в электродвигателе переменного тока, изменяется, выходной крутящий момент может следовать за значением команды, и избыточная мощность может потребляться за счет повышения потери в электродвигателе переменного тока, когда это необходимо. Следовательно, возможно появление перенапряжения в системе электропривода, причиной которого может быть подача излишней рекуперативной мощности от электродвигателя переменного тока, при этом способность управления крутящим моментом электродвигателя переменного тока сохраняется.
Также предпочтительно в системе электропривода согласно изобретению средство управления электродвигателем дополнительно включает в себя средство управления напряжением прямоугольной формы, средство выбора режима управления и средство коррекции режима управления. Средство управления напряжением прямоугольной формы управляет работой контура электропривода для подачи напряжения прямоугольной формы с фазой, зависящей от значения команды крутящему моменту, в электродвигатель переменного тока. Средство выбора режима управления выбирает одно из: средство управления током и средство управления напряжением прямоугольной формы в соответствии с рабочим состоянием электродвигателя переменного тока. Когда средство выбора режима управления выбирает средство управления напряжением прямоугольной формы, средство коррекции режима управления отменяет выбор, сделанный средством выбора режима управления, и выбирает средство управления током в соответствии с командой потери в электродвигателе, определенной средством задания увеличения потери. В частности, когда средство коррекции режима управления выбирает средство управление током, средство создания команды по току производит команду по току в области КПД привода электродвигателя переменного тока меньшего, чем КПД, достигаемый электроприводом при использовании средства управления напряжением прямоугольной формы.
Представленная выше система электропривода может избирательно применять общее управление током электродвигателя и управление напряжением прямоугольной формы для обеспечения выходной мощности электродвигателя в диапазоне высоких скоростей, таким образом может увеличивать рабочий диапазон электродвигателя переменного тока. Дополнительно, когда избыточная мощность появляется в электродвигателе переменного тока во время управления напряжением прямоугольной формы, вместо управления напряжением прямоугольной формы может быть выбрано управление током электродвигателя, которое выдает команду по току в области КПД привода меньшего, чем КПД при управлении напряжением прямоугольной формы. Таким образом, электродвигатель переменного тока может потреблять избыточную мощность в любой части расширенного рабочего диапазона. Поэтому возможно обеспечить выходную мощность в диапазоне высоких скоростей благодаря применению управления напряжением прямоугольной формы, а также предотвратить перенапряжение, которое может возникать в системе электропривода из-за чрезмерного повышения рекуперативной мощности от электродвигателя переменного тока.
Предпочтительно система электропривода согласно изобретению приводит в действие множество электродвигателей переменного тока, при этом контур электропривода и средство управления электродвигателем расположены в соответствии с каждым из электродвигателей переменного тока. Каждый из контуров электропривода выполнен с возможностью двунаправленно подавать и получать мощности к и от общего перезаряжаемого источника питания. Дополнительно, система электропривода дополнительно включает в себя средство распределения для задания потребляемых избыточных мощностей во множестве электродвигателей переменного тока, соответственно так, что все множество двигателей переменного тока в целом потребляет избыточную мощность. Каждое из средств управления электродвигателем управляет соответствующим электродвигателем переменного тока для выполнения режима потребления соответствующей одной из потребляемых избыточных мощностей, определенной средством распределения.
Представленная выше система электропривода, которая приводит в действие множество электродвигателей переменного тока, может выполнять режим потребления в каждом электродвигателе переменного тока таким образом, что все множество электродвигателей переменного тока в целом потребляет избыточную мощность, определенную с учетом баланса мощности во всей системе в целом. Таким образом, является возможным гасить избыточную мощность, потребляемую каждым электродвигателем переменного тока и поэтому уменьшать нагрузку на каждый электродвигатель переменного тока, а электродвигатели переменного тока могут потреблять избыточную мощность в целом. Таким образом, является возможным предотвращать появление перенапряжения в системе электропривода с учетом рабочих состояний множества электродвигателей переменного тока. В частности, даже когда один или несколько электродвигателей выполняют режим рекуперации (то есть режим генерации мощности), а другой(ие) электродвигатели работают под нагрузкой, является возможным предотвращение генерирования избыточной мощности множеством электродвигателей в целом, а также предотвращение генерирования перенапряжения в системе электропривода. Также потребляемая избыточная мощность может быть надежно увеличена по сравнению со случаем, когда один или несколько электродвигателей переменного тока целенаправленно потребляют избыточную мощность.
Дополнительно предпочтительно, в представленной в изобретении системе электропривода, средство распределения включает в себя средство задания верхнего предела для вычисления потребляемых избыточных мощностей множеством электродвигателей переменного тока, соответственно на основе текущего рабочего состояния соответствующего электродвигателя переменного тока, и средство определения распределения для задания потребляемой избыточной мощности в соответствующих электродвигателях переменного тока таким образом, что каждая потребляемая избыточная мощность находится в диапазоне соответствующей потребляемой избыточной мощности, рассчитанной средством задания верхнего предела.
Представленная выше система электропривода может распределять потребляемую избыточную мощность в диапазоне потребления в соответствии с текущим рабочим состоянием каждого электродвигателя переменного тока. Поэтому множество электродвигателей могут потреблять избыточную мощность, сохраняя при этом между собой баланс в соответствии с текущим рабочим состоянием каждого электродвигателя переменного тока (режим рекуперации мощности или работа под нагрузкой).
Дополнительно предпочтительно, в представленной в изобретении системе электропривода, средство распределения включает в себя средство определения распределения для задания потребления избыточных мощностей во множестве электродвигателей переменного тока, соответственно, с учетом температур множества электродвигателей переменного тока.
Представленная выше система электропривода контролирует увеличение температуры двигатель-генератора, которое происходит в соответствии с потреблением избыточной мощности. Поэтому является возможным избежать выполнения режима потребления избыточной мощности, при котором температура электродвигателя возрастает до диапазона высоких значений, что приводит к изменению параметров электродвигателя.
Дополнительно предпочтительно, в представленной в изобретении системе электропривода, средство распределения включает в себя средство задания верхнего предела для вычисления, для соответствующих электродвигателей переменного тока, избыточных мощностей, каждая из которых будет потребляться в течение предварительно определенного времени с учетом текущего рабочего состояния соответствующего электродвигателя переменного тока, и средство определения распределения для задания потребления избыточных мощностей в соответствующих электродвигателях переменного тока так, что потребление каждой избыточной мощности находится в диапазоне соответствующей избыточной мощности, потребляемой в течение предварительно определенного времени, рассчитанного средством задания верхнего предела.
Представленная выше система электропривода может распределять избыточную мощность для каждого электродвигателя переменного тока в пределах, допускающих увеличение в течение предварительно определенного времени для текущего рабочего состояния. Следовательно, система может потреблять всю избыточную мощность в течение короткого времени в соответствии с рабочими состояниями (режим рекуперации или работа под нагрузкой) соответствующих электродвигателей переменного тока.
В частности, в представленной выше структуре множество электродвигателей переменного тока включает в себя приводной электродвигатель, создающий приводную силу колеса транспортного средства, и неприводной электродвигатель, который непосредственно не создает мощность привода колеса. Средство распределения задает потребление избыточной мощности в соответствующих электродвигателях переменного тока таким образом, что неприводной электродвигатель потребляет избыточную мощность в приоритетном порядке.
В представленной выше системе электропривода, поскольку неприводной электродвигатель, который не создает непосредственно мощность привода колеса, используется в приоритетном порядке для потребления избыточной мощности, имеется возможность исключить вероятность того, что режим потребления избыточной мощности электродвигателей переменного тока повлияет на характеристики управляемости транспортного средства.
Таким образом, система электропривода, представленная в данном изобретении, может потреблять избыточную мощность в процессе управления по крутящему моменту без дестабилизации управления электродвигателем. Следовательно, система способна предотвращать генерирование перенапряжения в ней, вызванного подачей чрезмерной рекуперативной мощности от электродвигателя переменного тока.
Краткое описание чертежей.
Фиг.1 представляет полную схему системы электропривода в соответствии с вариантом осуществления изобретения.
Фиг.2 представляет структурную схему, иллюстрирующую управление током электродвигателя переменного тока, показанного на Фиг.1.
Фиг.3 представляет концептуальную диаграмму, иллюстрирующую зависимость между фазой тока электродвигателя и выходным крутящим моментом двигатель-генератора переменного тока, показанного на Фиг.1.
Фиг.4 представляет пример конфигурации таблицы для задания значения команды по току электродвигателя в соответствии со значением команды крутящему моменту и значением задания увеличения потери в электродвигателе.
Фиг.5 иллюстрирует задание текущих рабочих точек, соответствующих диаграмме характеристик фаза тока - выходной крутящий момент, представленной на Фиг.3.
Фиг.6 представляет блок-схему, иллюстрирующую порядок определения значения команды управления по току в системе электропривода в соответствии с первым вариантом осуществления.
Фиг.7 представляет ввод информации в блок задания увеличения потери в электродвигателе в соответствии со вторым вариантом осуществления.
Фиг.8 представляет блок-схему, иллюстрирующую работу блока задания увеличения потери в электродвигателе в соответствии с первым примером второго варианта осуществления.
Фиг.9 представляет блок-схему, иллюстрирующую работу блока задания увеличения потери в электродвигателе в соответствии со вторым примером второго варианта осуществления.
Фиг.10 представляет блок-схему, иллюстрирующую работу блока задания увеличения потери в электродвигателе в соответствии с третьим примером второго варианта осуществления.
Фиг.11 представляет ввод информации в блок задания увеличения потери в электродвигателе в соответствии с модификацией второго варианта осуществления.
Фиг.12 представляет блок-схему, иллюстрирующую работу блока задания увеличения потери в электродвигателе в соответствии с модификацией второго варианта осуществления.
Фиг.13 представляет способ управления, используемый в системе электропривода в соответствии с третьим вариантом осуществления.
Фиг.14 представляет блок-схему, иллюстрирующую способ выбора способа управления в системе электропривода в соответствии с третьим вариантом осуществления.
Фиг.15 представляет переключение способа управления, соответствующего режимам электродвигателя в системе электропривода в соответствии с третьим вариантом осуществления.
Фиг.16 представляет структурную схему, иллюстрирующую способ управления напряжением прямоугольной формы, используемый в системе электропривода в соответствии с третьим вариантом осуществления.
Фиг.17 представляет управление выходным крутящим моментом в способе управления напряжением прямоугольной формы.
Фиг.18 представляет концептуальную диаграмму, иллюстрирующую текущие рабочие точки при способе управления напряжением прямоугольной формы.
Фиг.19 представляет концептуальную диаграмму, иллюстрирующую метод применения управления током электродвигателя в рабочей области, в которой должен применяться способ управления напряжением прямоугольной формы.
Фиг.20 представляет блок-схему, иллюстрирующую способ управления электродвигателем в системе электропривода в соответствии с третьим вариантом осуществления.
Фиг.21 представляет схему, показывающую всю структуру системы электропривода в соответствии с четвертым вариантом осуществления изобретения.
Фиг.22 представляет блок-схему, иллюстрирующую способ определения значения задания увеличения потери в каждом двигатель-генераторе в системе электропривода в соответствии с четвертым вариантом осуществления.
Фиг.23 представляет блок-схему, иллюстрирующую первый пример распределения потребляемой избыточной мощности между двигатель-генераторами в соответствии с пятым вариантом осуществления.
Фиг.24 представляет концептуальную диаграмму, иллюстрирующую способ вычисления потребляемой избыточной мощности в каждом двигатель-генераторе.
Фиг.25 представляет блок-схему, иллюстрирующую предпочтительную структуру управления для распределения потребления избыточной мощности, представленного на Фиг.23.
Фиг.26 представляет блок-схему, иллюстрирующую второй пример распределения потребления избыточной мощности между двигатель-генераторами в соответствии с пятым вариантом осуществления.
Фиг.27 представляет всю структуру системы электропривода, имеющую структуру, представленную на Фиг.21, и дополнительно снабженную датчиком температуры.
Фиг.28 представляет блок-схему, иллюстрирующую третий пример распределения потребления избыточной мощности между двигатель-генераторами в соответствии с пятым вариантом осуществления.
Фиг.29 представляет концептуальную диаграмму, показывающую время, требующееся для изменения значения команды по току в соответствии с режимом потребления избыточной мощности.
Фиг.30 представляет структурный пример таблицы для получения потребления избыточной мощности, которое может быть увеличено в течение предварительно заданного времени, каждым двигатель-генератором.
Фиг.31 представляет блок-схему, иллюстрирующую дополнительно предпочтительную структуру управления для распределения потребления избыточной мощности, представленного на Фиг.28.
Лучшие варианты осуществления изобретения
Варианты осуществления изобретения будут представлены ниже со ссылками на чертежи. Одинаковые или соответствующие части имеют такие же номера ссылок, поэтому описание не будет повторяться принципиально.
[Первый вариант осуществления]
Фиг.1 представляет полную схему системы электропривода в соответствии с вариантом осуществления изобретения.
По Фиг.1 система электропривода 100 согласно варианту осуществления изобретения включает в себя блок генерирования напряжения постоянного тока 10#, сглаживающий конденсатор С0, инвертор 20, управляющее устройство 50 и двигатель-генератор переменного тока.
Нагрузка 60 приводится во вращение выходным крутящим моментом двигатель-генератора переменного тока. Например, нагрузка 60 включает в себя приводной вал 62, соединенный для передачи выходного крутящего момента двигатель-генератора переменного тока, и ведущее колесо 65, приводимое во вращение в соответствии с вращением приводного вала 62.
Как было представлено выше, двигатель-генератор переменного тока обычно используется в качестве приводного электродвигателя для привода ведущих колес автомобиля гибридного типа или автомобиля с электрическим приводом. В качестве альтернативы, двигатель-генератор переменного тока может быть выполнен с функцией электрогенератора, приводимого в действие двигателем, и может обладать обеими функциями - электродвигателя и генератора, так что генерирование рекуперативной мощности производится созданием крутящего момента в направлении, противоположном направлению вращения ведущего колеса 65. Дополнительно, двигатель-генератор переменного тока может быть установлен на автомобиль гибридного типа таким образом, что он может работать как электродвигатель для запуска двигателя автомобиля.
Блок генерирования напряжения постоянного тока 10# включает в себя источник питания постоянного тока В, системные реле SR1 и SR2, сглаживающий конденсатор С1 и повышающий/понижающий конвертер 12.
Источник питания постоянного тока В образован из никель-гидридной, литий-ионной вторичной батареи или подобной либо аккумуляторного устройства, например электрического двухслойного конденсатора. Датчик напряжения 10 регистрирует напряжение постоянного тока Vb, выдаваемое источником питания постоянного тока В. Датчик напряжения 10 выдает определенное напряжение постоянного тока Vb к управляещему устройству 50.
Системное реле SR1 подключено к положительному контакту электрода источника питания постоянного тока В и к линии 6 питания, а системное реле SR2 подключено к отрицательному контакту электрода источника питания постоянного тока В и к линии заземления 5. Системные реле SR1, SR2 включаются/выключаются сигналом SE от управляющего устройства 50. Более точно, системные реле SR1, SR2 включаются сигналом SE от управляющего устройства 50 на уровне H (высокий логический уровень) и выключаются сигналом SE от управляющего устройства 50 на уровне L (низкий логический уровень). Сглаживающий конденсатор С1 подключен между линией 6 питания и линией 5 заземления.
Повышающий/понижающий конвертер 12 включает в себя реактор L1 и силовые полупроводниковые переключающие элементы Q1 и Q2.
Силовые полупроводниковые переключающие элементы Q1 и Q2 подключены последовательно между линией 7 питания и линией 5 заземления. Включение/выключение силовых переключающих элементов Q1 и Q2 управляется управляющими сигналами S1 и S2 переключения от устройства 50.
В вариантах осуществления данного изобретения в качестве силовых полупроводниковых переключающих элементов могут использоваться биполярный транзистор с изолированным затвором (IGBT), силовой МОП-транзистор (металл-оксидный полупроводник), силовой биполярный транзистор или подобные им (далее по тексту называемый просто «переключающий элемент»). Встречно-параллельные диоды D1 и D2 устанавливаются относительно переключающих элементов Q1 и Q2.
Реактор L1 подключается между узлом соединения переключающих элементов Q1 и Q2 и линией 6 питания. К тому же сглаживающий конденсатор С0 подключается между линией 7 питания и линией 5 заземления.
Инвертор 20 состоит из U-фазного плеча 22, V-фазного плеча 24 и W-фазного плеча 26, соединенных параллельно между линией 7 питания и линией 5 заземления. Каждое фазное плечо образовано из переключающих элементов, соединенных последовательно между линией 7 питания и линией 5 заземления. Например, U-фазное плечо 22 образовано из переключающих элементов Q11 и Q12, V-фазное плечо 24 образовано из переключающих элементов Q13 и Q14, W-фазное плечо 26 образовано из переключающих элементов Q15 и Q16. Кроме того, встречно-параллельные диоды D11-D16 соответственно подключены к переключающим элементам Q11-Q16. Включение/выключение переключающих элементов Q11-Q16 управляется управляющими сигналами S11-S16 переключения от управляющего устройства 50.
Промежуточная точка каждого фазного плеча подключена к концу фазы каждой фазовой обмотки двигатель-генератора переменного тока. Другими словами, двигатель-генератор переменного тока является трехфазным электродвигателем с постоянными магнитами и сформирован таким образом, что концы с одной стороны трех фазовых обмоток U, V и W подключены к нейтральной точке N. Дополнительно, другой конец каждой фазовой обмотки подключен к промежуточной точке переключающего элемента фазного плеча 22, 24 или 26.
При работе в режиме повышения повышающий/понижающий конвертер 12 подает к инвертору 20 напряжение постоянного тока VH (это напряжение постоянного тока эквивалентно входному напряжению инвертора 20 и будет далее именоваться «системным напряжением VH»), сформированное добавочным напряжением постоянного тока Vb, подаваемым от источника питания постоянного тока В. Данное системное напряжение соответствует контактному напряжению постоянного тока инвертора, на который имеется ссылка в Патентном Документе 1.
Более точно, продолжительность включения переключающих элементов Q1 и Q2 задается в ответ на управляющие сигналы S1 и S2 переключения от управляющего устройства 50, а коэффициент повышения зависит от продолжительности включения.
Кроме того, во время работы в режиме понижения повышающий/понижающий конвертер 12 понижает напряжение постоянного тока (системное напряжение), поступающее от инвертора 20 через сглаживающий конденсатор С0, и подает его для зарядки источника питания В. Более точно, период, в течение которого включен только переключающий элемент Q1, и период, в течение которого оба переключающих элемента Q1 и Q2 выключены, обеспечиваются поочередно в ответ на управляющие сигналы S1 и S2 переключения от управляющего устройства 50, а коэффициент понижения зависит от продолжительности указанного выше периода включения.
Сглаживающий конденсатор С0 сглаживает напряжения постоянного тока от повышающего/понижающего конвертера 12 и подает сглаженное напряжение постоянного тока к инвертору 20. Датчик напряжения 13 обнаруживает напряжение между противоположными концами сглаживающего конденсатора С0, то есть системное напряжение, и выдает обнаруженное значение VH к управляющему устройству 50.
Если значение команды крутящему моменту двигатель-генератора переменного тока является положительным (Tqcom>0), инвертор 20 преобразует напряжение постоянного тока, поступающее от сглаживающего конденсатора С0, в напряжение переменного тока путем переключения переключающих элементов Q11-Q16 в ответ на управляющие сигналы S11-S16 от управляющего устройства 50 и приводит двигатель-генератор переменного тока к выдаче положительного крутящего момента. С другой стороны, если значение команды крутящему моменту двигатель-генератора переменного тока равно нулю (Tqcom=0), инвертор 20 преобразует напряжение постоянного тока в напряжение переменного тока путем переключения переключающих элементов Q11-Q16 в ответ на управляющие сигналы S11-S16 переключения от управляющего устройства 50 и приводит в действие двигатель-генератор таким образом, что крутящий момент равен нулю. Таким образом, двигатель-генератор переменного тока приводят в действие для создания нулевого или положительного крутящего момента, определяемого значением команды крутящему моменту Tqcom.
Дополнительно, во время рекуперативного торможения автомобиля гибридного типа или электромобиля, оснащенного системой электропривода 100, значение команды крутящему моменту Tqcom двигателя-генератора переменного тока задают отрицательным (Tqcom<0). В этом случае инвертор 20 преобразует напряжение переменного тока, генерируемое двигателем-генератором переменного тока, в напряжение постоянного тока путем переключения в ответ на управляющие сигналы S11-S16 переключения и подает преобразованное напряжение постоянного тока (системное напряжение) к повышающему/понижающему конвертеру 12 через сглаживающий конденсатор С0. Отметим, что уже упоминавшееся рекуперативное торможение включает в себя торможение с генерированием рекуперативной мощности в случае, когда педаль ножного тормоза нажимается водителем автомобиля гибридного типа или электромобиля, и замедление движения (или прекращение ускорения) автомобиля, когда отпускают педаль акселератора и не задействуют педаль ножного тормоза, тем самым вызывая генерирование рекуперативной мощности.
Датчик тока 27 определяет ток MCRT, протекающий в двигатель-генераторе переменного тока, и выдает определенный ток к управляющему устройству 50. Так как сумма мгновенных значений токов трех фаз iu, iv и iw равна нулю, датчик тока может быть выполнен с возможностью детектирования только токов двух фаз (например, ток V-фазы iv и ток W-фазы iw), как показано на Фиг.1.
Датчик угла поворота 28 (датчик положения) определяет угол поворота θ ротора (не показан) двигатель-генератора переменного тока и направляет определенный угол поворота θ в управляющее устройство 50. В управляющем устройстве 50 производится вычисление скорости вращения Nmt (угловой скорости вращения ω) двигатель-генератора переменного тока на основании угла поворота θ.
Управляющее устройство 50 управляет работой инвертора 20 таким образом, чтобы двигатель-генератор переменного тока выдавал крутящий момент в соответствии со значением команды крутящему моменту Tqcom с помощью способа, представленного ниже, на основе ввода значения команды крутящему моменту от электронного управляющего блока (ECU), обеспеченного извне, а также напряжения батареи Vb регистрируемого датчиком напряжения 10, системного напряжения VH регистрируемого датчиком напряжения 13, токов электродвигателя MCRT от датчика тока 27 и угла поворота θ от датчика угла поворота 28. Другими словами, управляющее устройство 50 производит управляющие сигналы S11-S16 переключения для управления инвертором 20, как упоминалось выше, и направляет их в инвертор 20.
Во время работы повышающего/понижающего конвертора 12 в режиме вольтдобавки или повышения напряжения управляющее устройство 50 вычисляет значение команды системного напряжения VH в соответствии с рабочим состоянием двигатель-генератора переменного тока и генерирует управляющие сигналы S1 и S2 переключения, обеспечивая выходное напряжение VH значения команды по напряжению на основе значения этой команды этого напряжения и определенного значения системного напряжения VH, измеренной датчиком напряжения 13.
Кроме того, когда управляющее устройство 50 принимает от внешнего электронного управляющего блока (ECU) управляющий сигнал RGE, указывающий, что автомобиль гибридного типа или электромобиль входит в режим рекуперативного торможения, оно генерирует управляющие сигналы S11-S16 переключения и выдает их в инвертор 20 таким образом, что напряжение переменного тока, генерируемое двигатель-генератором переменного тока, преобразуется в напряжение постоянного тока. Таким образом, инвертор 20 преобразует напряжение переменного тока, генерируемое двигатель-генератором переменного тока, в напряжение постоянного тока для подачи его в повышающий/понижающий конвертер 12.
Дополнительно, в ответ на управляющий сигнал RGE управляющее устройство 50 генерирует управляющие сигналы S1 и S2 переключения для понижения напряжения постоянного тока, подаваемого от инвертора 20, и выдает их на повышающий/понижающий конвертер 12. Таким образом, рекуперативная мощность двигатель-генератора переменного тока используется для зарядки источника питания постоянного тока В.
Кроме того, когда система электропривода 100 должна быть запущена или остановлена, управляющее устройство 50 генерирует сигнал SE для включающих/выключающих системных реле SR1 и SR2 и выдает его в системные реле SR1 и SR2.
Дополнительно, управляющее устройство 50 получает информацию об источнике питания постоянного тока В, такую как SOC (состояние заряда), и количество мощности Win, которое еще можно ввести, указывающее ограничение зарядки. Таким образом, управляющее устройство 50 управляет потребляемой мощностью и генерируемой мощностью (рекуперативной мощностью) в системе электропривода 100.
Управление приводом двигатель-генератора переменного тока в системе электропривода 100 производится главным образом посредством управления с обратной связью по току электродвигателя MCRT, как будет описано ниже.
Фиг.2 представляет блок-схему управления током электродвигателя, производимого управляющим устройством 50 в соответствии со способом широтно-импульсной модуляции (PWM).
В соответствии с Фиг.2 блок 200 управления током включает в себя блоки 220 и 250 преобразования координат, блок 230 вычисления скорости вращения, блок 240 вычисления PI, блок 260 генерирования сигнала PWM. Дополнительно, блок управления током 200 включает в себя блок 210 создания команды по току, обеспечивающий команду по току в блок 200 управления током, и блок 300 задания увеличения потери в электродвигателе, который предоставляет потерю мощности, которая должна произойти в двигатель-генераторе переменного тока, в блок 210 создания команд по току.
Блок 300 задания увеличения потери в электродвигателе получает информацию о состоянии заряда (SOC) источника питания постоянного тока В, о количестве мощности Win, которую можно подвести, управляющем сигнале RGE, а также рабочем режиме двигатель-генератора переменного тока, т.е. значении команды по крутящему моменту Tqcom и скорости вращения электродвигателя Nmt (угловая скорость вращения ω), и генерирует значение задания увеличения потери в электродвигателе Mlcom.
Блок 210 создания команды по току создает значения команды по току Idcom и Iqcom в соответствии со значением команды крутящему моменту Tqcom и значением задания увеличения потери в двигатель-генераторе переменного тока Mlcom на основании таблицы или подобной, подготовленной заранее.
Блок 220 преобразования координат выполняет преобразование координат (три фазы в две фазы), используя угол поворота θ двигатель-генератора переменного тока, определяемый датчиком 28 угла поворота, и таким образом вычисляет ток id по оси “d” и ток iq по оси “q” на основании тока электродвигателя MCRT (iv, iw, iu = -(iv + iw)), определяемого датчиком 27 тока.
Блок 230 вычисления скорости вращения вычисляет скорость вращения Nmt двигателя-генератора переменного тока на основании выходного сигнала от 28 датчика угла поворота.
Блок 240 вычисления PI принимает отклонение ΔId (ΔId = Idcom - id) от значения команды по току по оси 'd' и отклонение ΔIq (ΔIq = Iqcom - iq) от значения команды по току по оси 'q'. Блок 240 вычисления PI производит вычисление PI с использованием предварительного заданного коэффициента усиления для получения управляющего отклонения для отклонений ΔId и ΔIq тока по каждой из осей 'd' и 'q' и генерирует значения Vd# и Vq# команд по напряжению по осям 'd' и 'q', соответствующие этим управляющим отклонениям соответственно.
Блок 250 преобразования координат выполняет преобразование координат (две фазы в три фазы), используя угол поворота θ двигатель-генератора, и таким образом преобразует значения Vd# и Vq# команд по напряжению по осям 'd' и 'q' в соответствующие значения Vu, Vv и Vw фаз U-, V- и W- команд по фазному напряжению. В этом случае системное напряжение VH также отражается в преобразовании значений Vd# и Vq# команд по напряжению по осям 'd' и 'q' в соответствующие значения Vu, Vv и Vw команд по фазному напряжению.
Блок 260 создания сигнала широтно-импульсной модуляции (PWM) создает управляющие сигналы S11-S16 переключения, представленные на Фиг.1, на основании сравнения значений Vu, Vv и Vw команд по напряжению в соответствующих фазах и предварительно заданной несущей. Коммутация инвертора 20 управляется в соответствии с управляющими сигналами S11-S16 переключения, выдаваемыми блоком 200 управления током, таким образом, что к двигатель-генератору переменного тока прикладывается напряжение переменного тока для выдачи крутящего момента в соответствии со значением Tqcom команды крутящему моменту.
Блок 310 создания значения команды VH создает значение управляющей команды VH# системного напряжения VH (также именуемой здесь как «значение команды по напряжению VH#») в зависимости от значения Tqcom команды крутящему моменту и скорости вращения Nmt двигатель-генератора переменного тока.
Блок 350 создания сигнала PWM создает управляющие сигналы S1 и S2 переключения в соответствии с предварительно заданным способом управления PWM (широтно-импульсной модуляции), так что выходное напряжение конвертера 12 достигает значения команды по напряжению VH#, определяемого на основании напряжения батареи Vb, детектируемого датчиком напряжения 10, и действующего системного напряжения VH.
В соответствии с данным вариантом осуществления в системе электропривода блок 210 создания команды по току отражает значение увеличения потери в электродвигателе Mlcom при создании значений команд по току Idcom и Iqcom, которые используются для задания выходного крутящего момента двигатель-генератора переменного тока в соответствии со значением команды крутящему моменту Tqcom, как будет подробно описано далее.
Фиг.3 представляет концептуальную диаграмму, иллюстрирующую зависимость между фазой тока электродвигателя и выходным крутящим моментом двигатель-генератора переменного тока.
На Фиг.3 сплошные линии являются характеристическими линями, которые показывают изменения крутящего момента при изменении фазы тока и сохранении постоянной амплитуды тока. Как можно понять из этих характеристических линий, при определенной фазе тока достигается максимальный крутящий момент, т.е. максимальный КПД электродвигателя, связанный с каждой амплитудой тока. Характеристическая линия оптимального КПД CL0 получается соединением рабочих точек максимального КПД, соответствующих соответствующим амплитудам тока.
Блок 210 создания команды по току, показанный на Фиг.2, в основном определяет амплитуду и фазу тока электродвигателя, чтобы задать рабочую точку тока на характеристической линии оптимального КПД CL0 относительно значения команды выходного крутящего момента, то есть значения команды по крутящему моменту Tqcom, и генерирует значения команд по току Idcom и Iqcom для осей 'd' и 'q' так, что амплитуда тока и фаза тока, определенные таким образом, могут быть достигнуты.
Также характеристические линии увеличения потери CL1-CL3 могут быть получены как наборы текущих рабочих точек, которые получаются сдвигом фазы тока от оптимальной точки для генерирования определенного количества малой потери в двигатель-генераторе переменного тока. Таким образом, каждая характеристическая линия увеличения потери может быть определена как набор текущих рабочих точек, в которых происходят потери в электродвигателе равной величины, соответствующие каждой амплитуде тока.
Следовательно, одна текущая рабочая точка может быть выбрана из характеристик «фаза тока - выходной крутящий момент», показанных на Фиг.3, в соответствии со значением команды по крутящему моменту Tqcom и значением задания увеличения потери в электродвигателе Mlcom.
Например, как показано на Фиг.3, когда значение команды по крутящему моменту Tqcom равно Т1, текущие рабочие точки Р1о, Р1а, P1b и P1c получены для значений задания увеличения потери в электродвигателе Mlcom равных 0, L1, L2 и L3 соответственно. Аналогично, когда значение команды крутящему моменту Tqcom равна Т2, текущие рабочие точки Р2о, Р2а, P2b и P2c могут быть заданы для получения значений задания увеличения потери в электродвигателе Mlcom, равных 0, L1, L2 и L3 соответственно.
Как показано на Фиг.4, справочная таблица TBL подготовлена заранее. Значения таблицы образованы наборами (Idcom, Iqcom) значений команд по току по осям 'd' и 'q', соответствующих текущим рабочим точкам в соответствии со значением команды крутящему моменту Tqcom и значением задания увеличения потери в электродвигателе Mlcom. Блок 210 создания команд по току обращается к таблице TBL в соответствии со значением команды крутящему моменту Tqcom и значением задания увеличения потери в электродвигателе Mlcom и таким образом может генерировать значения команд по току Idcom и Iqcom для создания выходного крутящего момента в соответствии со значением команды крутящему моменту Tqcom при увеличении потери мощности в соответствии со значением задания увеличения потери в электродвигателе Mlcom.
Таким образом, является возможным произвольно задать режим работы (Mlcom=0), при котором двигатель-генератор переменного тока работает с оптимальным КПД, и режим потребления (Mlcom>0) произвольной избыточной мощности путем увеличения потери мощности в двигатель-генераторе переменного тока в соответствии с заданным значением.
В качестве альтернативы, как показано на Фиг.5, можно заранее подготовить таблицу, табличные значения которой образованы из наборов значений команд по току (Idcom, Iqcom), соответствующих соответственным точкам на двумерной плоскости характеристик «фаза тока - выходной крутящий момент», рассматриваемым в качестве кандидатов в текущие рабочие точки. В этом случае блок 210 создания команд по току определяет, какую именно текущую рабочую точку следует выбрать среди кандидатов на Фиг.5 в соответствии со значением команды крутящему моменту Tqcom и значением задания увеличения потери в электродвигателе Mlcom. Этот способ может производить значение команды по току, подобно способу, представленному на Фиг.4.
Фиг.6 представляет блок-схему, иллюстрирующую порядок определения значения команды управления по току в системе электропривода в соответствии с первым вариантом осуществления.
Согласно Фиг.6 управляющее устройство 50 в соответствии с рабочим состоянием двигатель-генератора переменного тока определяет избыточную мощность, которую необходимо израсходовать в двигатель-генераторе переменного тока, т.е. потерю мощности, которую следует увеличить на этапе S100. Более точно, управляющее устройство 50 определяет значение задания увеличения потери в электродвигателе Mlcom, соответствующее величине потери мощности, которая должна быть дополнительно потреблена, соответствующей избыточной мощности в двигатель-генераторе переменного тока, за счет снижения КПД электропривода. Обработка данных на этапе S100 соответствует работе блока 300 задания увеличения потери в электродвигателе, показанного на Фиг.2.
Например, на этапе S100, когда двигатель-генератор переменного тока выполняет рекуперативный режим в соответствии с управляющим сигналом RGE, зарядка источника питания постоянного тока В (вторичная батарея) может быть ограничена на основании состояния заряда (SOC), количества подводимой мощности Win, когда задано (Mlcom>0). Таким образом, значение задания увеличения потери в электродвигателе Mlcom определяется с учетом рабочего состояния двигатель-генератора переменного тока (т.е. с учетом того, выполняется ли в настоящий момент рекуперативный режим или нет, и отражает ли оценочная величина генерируемой мощности в двигатель-генераторе переменного тока сцепление с дорогой/пробуксовку или подобное колес) и состояния получателя рекуперативной мощности от двигатель-генератора переменного тока.
Управляющее устройство 50 на этапе S110 определяет, было ли определенное на этапе S100 значение задания увеличения потери в электродвигателе Mlcom больше, чем Mlcom (Mlcom>0), или нет. Если значение Mlcom равно нулю (НЕТ на этапе S110), нет необходимости намеренно увеличивать потерю мощности в двигатель-генераторе переменного тока, поэтому управление электродвигателем имеет цель максимизации его КПД. Поэтому управляющее устройство 50 определяет значения команд по току Idcom и Iqcom в соответствии со значением команды крутящему моменту Tqcom так, что текущая рабочая точка может быть определена на характеристической линии CL0 оптимального КПД, показанной на Фиг.3. Например, значения команд по току Idcom и Iqcom по осям 'd' и 'q' определяются с использованием таблицы TBL (Фиг.4).
Если значение задания увеличения потери в электродвигателе Mlcom больше нуля (ДА на этапе S110), управляющее устройство 50 определяет на этапе S130, изменился или нет выходной крутящий момент, т.е. изменилось ли значение команды крутящему моменту Tqcom по сравнению со значением при последнем выполнении подпрограммы, представленной на Фиг.6.
Если значение команды крутящему моменту Tqcom не изменилось по сравнению со своим последним значением (НЕТ на этапе S130), значение команды по току определяется на этапе S140 в соответствии со значением команды крутящему моменту Tqcom так, что текущая рабочая точка может быть определена на характеристической линии увеличения потери (т.е. CL1-CL3 на Фиг.3), соответствующей значению задания увеличения потери в электродвигателе Mlcom. Таким образом, значения команд по току по осям 'd' и 'q' Idcom и Iqcom определяются в соответствии с точками пересечения значения команды крутящему моменту Tqcom и значения задания увеличения потери в электродвигателе Mlcom в таблице TBL на Фиг.4.
Наоборот, когда выходной крутящий момент изменяется, т.е. когда значение команды крутящему моменту Tqcom изменилось по отношению к своему последнему значению (ДА на этапе S130), значение команды току определяется в соответствии с переходом текущей рабочей точки на плоскости «фаза тока - выходной крутящий момент», представленной на Фиг.5.
Например, когда текущая рабочая точка смещается от точки P1о последней операции (Tqcom=T1 и Mlcom=0) к рабочей точке P2a (Tqcom=T2 и Mlcom=L1), значение команды току определяется по данным таблицы TBL, показанной на Фиг.4 в соответствии с изменением текущей рабочей точки на плоскости «фаза тока - выходной крутящий момент», представленной на Фиг.5. Таким образом устанавливаются значения команд по току Idcom и Iqcom по осям 'd' и 'q', соответствующие текущей рабочей точке P2a.
Как было описано ранее, система электропривода в соответствии с первым вариантом осуществления данного изобретения может создавать значения команды по току Idcom и Iqcom для достижения выходного крутящего момента, в соответствии со значением команды крутящему моменту Tqcom, при отражении значения задания увеличения потери в электродвигателе Mlcom. Поэтому потеря мощности в двигатель-генераторе переменного тока может быть увеличена в соответствии со значением задания увеличения потери в электродвигателе Mlcom при обеспечении управления выходным крутящим моментом и, таким образом, избыточная мощность электродвигателя переменного тока может потребляться, когда это необходимо (например, электродвигатель мгновенно генерирует большое количество мощности из-за пробуксовки/сцепления с дорогой колес или аналогичной причине). Таким образом, рекуперативная мощность может быть погашена, что позволяет предотвратить появление перенапряжения в системе электропривода (в особенности, системного напряжения) из-за чрезмерной рекуперативной мощности от электродвигателя переменного тока.
Поскольку высокочастотная гармоника не накладывается на ток электродвигателя, в отличие от уже упоминавшегося Патентного Документа 1 вероятность нестабильной работы системы управления электродвигателем может быть низкой. Поэтому запас параметров, необходимый в деталях, таких как конденсатор, может быть уменьшен, что приводит к снижению стоимости их изготовления. По сравнению со структурой управления, в которой высокочастотная гармоника накладывается на ток электродвигателя, возможно надежное увеличение количества избыточной мощности, которое специально будет потребляться в двигатель-генераторе переменного тока, т.е. гашение количества рекуперативной мощности.
Как уже пояснялось ранее со ссылкой на Фиг.3-5, значение команды по току создается на основании определения текущих рабочих точек, имеющих непрерывность, поэтому значение команды по току меняется соответственным образом с изменениями рабочей стадии двигатель-генератора переменного тока (как правило, в соответствии с изменениями команды выходного крутящего момента). Поэтому, даже когда значение команды крутящему моменту изменяется в режиме потребления избыточной мощности, производится следящее управление выходного крутящего момента двигатель-генератора переменного тока при непрерывном выполнении режима потребления избыточной мощности. Таким образом, можно предотвратить колебания крутящего момента.
В соответствии с режимом потребления двигатель-генератора переменного тока, представленным выше, так как избыточная мощность может потребляться независимо от рабочего состояния электродвигателя, т.е. не только при рекуперативном режиме электродвигателя, но также и при работе электродвигателя под нагрузкой, дополнительно это может улучшить эффект предотвращения появления перенапряжения в системе электропривода.
Соответствие между изобретением и структурой, приведенной в качестве примера в первом варианте осуществления, является следующим. Инвертор 20 и управляющее устройство 50 на Фиг.1 соответствуют «контуру электропривода» и «средству управления электродвигателем» в изобретении. На Фиг.2 блок 210 создания команды по току соответствует «средству создания команды по току» в изобретении, блок 200 управления током на Фиг.2 соответствует «средству управления током» в изобретении, а блок 300 задания увеличения потери в электродвигателе соответствует «средству задания увеличения потери» в изобретении. Таблица TBL на Фиг.4 соответствует «средству запоминания характеристик» в изобретении.
[Второй вариант осуществления]
Второй вариант осуществления будет детально представлен в связи с заданием избыточной мощности, которая должна быть потреблена двигатель-генератором переменного тока, уже рассмотренным в первом варианте осуществления, т.е. заданием значения задания увеличения потери мощности в электродвигателе Mlcom, указывающего количество увеличения потери мощности в двигатель-генераторе переменного тока. Блок 300 задания увеличения потери в электродвигателе в соответствии со вторым вариантом осуществления и его модификацией, который будет рассмотрен далее, может использоваться как блок 300 задания увеличения потери в электродвигателе на Фиг.2. Таким образом, управление электродвигателем после задания значения увеличения потери в электродвигателе Mlcom производится в основном аналогично управлению системой электропривода в соответствии с первым вариантом осуществления, поэтому подробное ее описание здесь не приводится.
(Первый пример задания значений)
В соответствии с Фиг.7 блок 300 задания увеличения потери в электродвигателе получает информацию для определения количества преднамеренной потери мощности в двигатель-генераторе переменного тока, а более точно получает управляющий сигнал RGE, значение команды крутящему моменту Tqcom и скорость вращения Nmt (угловая скорость вращения ω) электродвигателя, указывающие рабочее состояние двигатель-генератора переменного тока.
Блок 300 задания увеличения потери в электродвигателе задает значение задания увеличения потери в электродвигателе Mlcom на основе оценки генерируемой мощности двигатель-генератора переменного тока, т.е. в соответствии с блок-схемой на Фиг.8.
В соответствии с Фиг.8 на этапе S200 блок 300 задания увеличения потери в электродвигателе оценивает генерируемую мощность Png в двигатель-генераторе переменного тока по значению команды крутящему моменту Tqcom и угловой скорости вращения ω в процессе рекуперации мощности в двигатель-генераторе переменного тока. Например, генерируемая мощность Png может быть оценена на основании следующего уравнения (1):
Дополнительно, на этапе S210 блок 300 задания увеличения потери в электродвигателе сравнивает генерируемую мощность Png и рекуперируемую мощность Pin в двигатель-генераторе переменного тока. Рекуперируемая мощность Pin может быть определенным фиксированным значением, соответствующим, например, количеству генерирования мощности во время буксировки/сцепления с дорогой колес, но предпочтительно определяется на основе количества мощности Win, которое может потребить источник питания постоянного тока В.
Когда мощность Pgn, рекуперируемая двигатель-генератором переменного тока, превышает рекуперируемую мощность Pin, т.е. рекуперативную мощность, которая может быть принята на входе системы электропривода 100, т.е. когда(Pgn>Pin) выполняется (ДА на этапе S210), блок 300 задания увеличения потери в электродвигателе устанавливает значение задания увеличения мощности Mlcom больше нуля на этапе S230. При этой операции значение задания увеличения потери в электродвигателе Mlcom задается в соответствии с генерируемой мощностью Png электродвигателя и предпочтительно в соответствии с избыточным количеством (Pgn - Pin) рекуперативной мощности относительно приемлемого количества.
Когда мощность Pgn, генерируемая в двигатель-генераторе переменного тока, удовлетворяет условию (Pgn≤Pin), т.е. когда генерируемая двигатель-генератором переменного тока мощность является приемлемой как рекуперативная мощность (НЕТ на этапе S210), блок 300 задания увеличения потери в электродвигателе задает значение задания увеличения потери мощности в электродвигателе Mlcom, равное нулю на этапе S220.
В соответствии с блок-схемой на Фиг.8, как было представлено выше, с генерированием чрезмерной рекуперативной мощности двигатель-генератором переменного тока можно легко и надежно справиться на основании оценки генерируемой двигатель-генератором переменного тока мощности в соответствии со значением команды крутящему моменту Tqcom и угловой скоростью вращения ω электродвигателя. Таким образом, состояние, в котором избыточная мощность должна быть израсходована путем увеличения потери в двигатель-генераторе переменного тока, может быть легко обнаружено. При этом значение увеличения потери в электродвигателе Mlcom может быть соответствующим образом задано, и также возможно избежать появления перенапряжения внутри системы электропривода по причине чрезмерной рекуперативной мощности двигатель-генератора переменного тока.
(Второй пример задания значений)
В соответствии с Фиг.7 блок 300 задания увеличения потери в электродвигателе получает детектированное значение системного напряжения VH, полученное датчиком 13 напряжения.
Блок 300 задания увеличения потери в электродвигателе может задать значение увеличения потери в электродвигателе Mlcom на основании контроля системного напряжения VH в соответствии с блок-схемой по Фиг.9.
В соответствии с Фиг.9 блок 300 задания увеличения потери в электродвигателе получает детектированное значение системного напряжения VH (контактное напряжение постоянного тока инвертора) от датчика напряжения 13 на этапе S250 и сравнивает системное напряжение VH с определяющим напряжением Vjd для определения того, повысилось ли напряжение внутри системы или нет. Определяющее напряжение Vjd задается равным значению, которое меньше, чем перенапряжение, повреждающее устройство в системе электропривода, но выше, чем командное значение системного напряжения VH.
При возрастании системного напряжения (ДА на этапе S260) блок 300 задания увеличения потери в электродвигателе задает значение задания увеличения потери в электродвигателе Mlcom больше нуля (Mlcom>0) на этапе S270 так, что потребление мощности в двигатель-генераторе переменного тока может быть увеличено для гашения рекуперативной мощности и предпочтительнее для предотвращения рекуперирования мощности от двигатель-генератора переменного тока. В этом режиме значение задания увеличения потери в электродвигателе Mlcom предпочтительно определяется в зависимости от избыточного количества системного напряжения VH.
Если перенапряжения не произошло (НЕТ на этапе S260), не требуется увеличивать потери мощности в двигатель-генераторе переменного тока, так что блок 300 задания увеличения потери в электродвигателе задает значение задания увеличения потери в электродвигателе Mlcom, равной нулю, на этапе S280 для обеспечения работы двигатель-генератора переменного тока на самой высокой точке КПД.
В соответствии с блок-схемой по Фиг.9, как было представлено выше, генерирование избыточной мощности в двигатель-генераторе переменного тока может быть надежно проконтролировано на основе увеличения напряжения внутри системы электропривода (обычно контактное напряжение постоянного тока инвертора) в процессе режима рекуперации. Таким образом, значение задания увеличения потери в электродвигателе Mlcom может быть задано соответствующим образом так, чтобы избежать появления перенапряжения в системе электропривода, возникающего по причине избыточной рекуперативной мощности от двигатель-генератора переменного тока.
В блок-схеме, представленной на Фиг.9, можно задать значение задания увеличения потери в электродвигателе Mlcom больше нуля (Mlcom>0), основываясь на детектированных напряжениях в других частях системы электропривода, где возможно нежелательное появление перенапряжения.
(Третий пример задания значений)
Дополнительно, как показано на Фиг.10, способы задания значений задания увеличения потери в электродвигателе, представленные на Фиг.8 и Фиг.9, могут быть объединены.
В соответствии с Фиг.10 блок 300 задания увеличения потери в электродвигателе на этапе S300 задает значение задания увеличения потери в электродвигателе Mlcom1 для потребления чрезмерной рекуперативной мощности от двигатель-генератора переменного тока на основании выработанной мощности в двигатель-генераторе переменного тока, оцененной в процессе обработки при выполнении этапов S200 - S230, представленных на Фиг.8.
Дополнительно, на этапе S310 блок 300 задания увеличения потери в электродвигателе задает значение задания увеличения потери в электродвигателе Mlcom2 для потребления избыточной мощности в двигатель-генераторе переменного тока на основании повышения внутреннего напряжения в системе электропривода 100 (обычно это системное напряжение VH)в соответствии с обработкой на этапах S50 - S280 на Фиг.9.
На этапе S320 блок 300 задания увеличения потери в электродвигателе определяет в качестве значения Mlcom задания увеличения потери в электродвигателе максимальное значение, выбранное из двух значений Mlcom1 и Mlcom2, заданных на этапах S300 и S310 соответственно.
В соответствии с блок-схемой на Фиг.10 в основном определяется, есть ли необходимость увеличить потерю мощности в двигатель-генераторе переменного тока или нет, на основании оценки генерируемой мощности в двигатель-генераторе переменного тока, и на основании этого определения может быть соответствующим образом задано значение задания увеличения потери в электродвигателе Mlcom с целью снизить рекуперативную мощность от двигатель-генератора переменного тока, когда внутреннее напряжение в системе электропривода возрастает по причине неточной оценки генерируемой мощности.
Поэтому возможно надежное предотвращение регенерации перенапряжения внутри системы электропривода, возникающего по причине чрезмерной рекуперативной мощности от двигатель-генератора переменного тока.
[Модификация второго варианта осуществления]
Увеличение потери мощности в двигатель-генераторе переменного тока может быть определено не только на основании баланса мощности двигатель-генератора переменного тока, что уже было описано выше, но также и на основании требования силы торможения в транспортном средстве, оборудованном системой электропривода.
По Фиг.11 в модификации второго варианта осуществления блок 300 задания увеличения потери в электродвигателе получает различную информацию и данные, представленные на Фиг.7, а также дополнительно получает величину нажатия педали тормоза от датчика 320 величины нажатия педали тормоза, который воспринимает величину нажатия педали 330 тормоза, нажимаемой водителем для торможения транспортного средства.
Блок 300 задания увеличения потери в электродвигателе может отражать эту величину нажатия педали тормоза в значении задания увеличения потери мощности в электродвигателе Mlcom при определении его, как это представлено на Фиг.12.
По Фиг.12 в модификации второго варианта осуществления блок 300 задания увеличения потери в электродвигателе выполняет обработку на этапах S300 и S310, подобно тому, как это производилось на фиг.10, и дополнительно задает значение задания увеличения потери мощности в электродвигателе Mlcom3 на основе величины нажатия педали тормоза на этапе S315.
На этапе S315 значение задания потери мощности в электродвигателе Mlcom3 задается на увеличение при увеличении силы торможения, затребованной водителем, т.е. при увеличении величины нажатия педали тормоза на этапе S315. В частности, когда источник питания постоянного тока В находится в состоянии избыточного заряда и генерирование в двигатель-генераторе переменного тока подавляется (задается (Tqcom<0)), Mlcom3 задается высокой.
Когда значение задания потери в электродвигателе Mlcom3 возрастает, как упоминалось выше, КПД двигатель-генератора переменного тока снижается, потеря мощности увеличивается, в соответствии с чем момент инерции по отношению к угловой скорости ω вращения двигатель-генератора переменного тока эквивалентно возрастает. Эффект снижения угловой скорости ω вращения по причине возрастания момента инерции может давать водителю более выраженное ощущение торможения транспортного средства.
На этапе S330 блок 300 задания увеличения потери в электродвигателе выбирает в качестве значения задания увеличения потери в электродвигателе Mlcom максимальное значение из значения задания увеличения потери в электродвигателе Mlcom1, полученного на этапе S300 на основе оценки мощности, генерируемой в двигатель-генераторе переменного тока, значения задания увеличения потери в электродвигателе Mlcom2, заданного на этапе S310 на основе контроля внутреннего напряжения системы (системного напряжения VH), и значения задания увеличения потери в электродвигателе Mlcom3 на основе величины нажатия педали тормоза.
Таким образом, возможно предотвращение генерирования перенапряжения в системе электропривода по причине чрезмерной рекуперативной мощности, причиной которой является избыточная мощность двигатель-генератора переменного тока, и также возможно задать потребление избыточной мощности (увеличение потери) в двигатель-генераторе переменного тока так, что при этом может быть получено более выраженное ощущение торможения транспортного средства, когда водитель требует силу торможения транспортного средства. Поэтому возможно улучшение тормозных характеристик или управляемости транспортного средства, оснащенного данной системой электропривода.
Соответствие между изобретением и структурой, представленной во втором варианте осуществления и его модификациях, является следующим. Датчик напряжения 13 на Фиг.7 соответствует «детектору напряжения» в изобретении, а этап S200 в блок-схеме на Фиг.8 соответствует «средству оценки мощности» в изобретении.
[Третий вариант осуществления]
Уже известно, что управление током электродвигателя в соответствии с широтно-импульсной модуляцией (PWM), представленной в первом и втором вариантах осуществления, может увеличить амплитуду основной волновой гармоники напряжения переменного тока, приложенного к электродвигателю, только в 0,61 раз больше входного напряжения инвертора (системного напряжения VH). В транспортном средстве гибридного типа или подобных ему, оснащенных двигатель-генератором переменного тока, индуцированное напряжение в двигатель-генераторе переменного тока возрастает в диапазоне высоких скоростей. Поэтому уже предлагалось выполнять управление с ослаблением магнитного поля для улучшения выходных характеристик в диапазоне высоких скоростей.
С указанной выше точкой зрения система электропривода в третьем варианте осуществления избирательно применяет три способа управления при преобразовании мощности инвертором, как представлено на Фиг.13.
По Фиг.13 способ управления синусоидальной широтно-импульсной модуляции применяется в общем управлении синусоидальной широтно-импульсной модуляции (PWM) для выполнения управления с обратной связью по току электродвигателя в соответствии со структурной схемой управления на Фиг.2, вкл/выкл переключающего элемента в каждом плече фазы управляется в соответствии со сравнением напряжения между значением команды по синусоидальному напряжению и несущим сигналом (обычно треугольным сигналом).
Следовательно, управление продолжительностью включения выполняется в связи с набором высокоуровневых периодов, соответствующих периодам включения верхних плеч (Q11, Q13 и Q15) и низкоуровневого периода, соответствующего периоду включения нижних плеч (Q12,Q14 и Q16) так, что основные волновые гармоники принимают синусоидальную форму в течение определенного периода. Хорошо известно, что способ управления синусоидальной широтно-импульсной модуляцией может увеличивать амплитуду основной волновой гармоники только до 0,61 величины входного напряжения инвертора.
Напротив, в соответствии со способом управления напряжением прямоугольной формы используется прямоугольный сигнал с соотношением 1:1 высоко- и низкоуровневых периодов, и часть такого сигнала, соответствующая одному импульсу, прикладывается к двигатель-генератору переменного тока. Это может увеличить коэффициент модуляции до 0,78.
В способе управления PWM с перемодуляцией управление PWM, подобно упоминавшемуся выше способу управления синусоидальной PWM, и выполняется с искажением амплитуды несущего сигнала для снижения ее в управлении с обратной связью по току электродвигателя в соответствии со структурной схемой управления на фиг. 2. Следовательно, основные волновые гармоники могут быть искажены для увеличения коэффициента модуляции до значения между 0,61 и 0,78.
В двигатель-генераторе переменного тока при увеличении скорости вращения и выходного крутящего момента увеличивается индуцированное напряжение и увеличивается необходимое напряжение. Напряжение, повышаемое конвертером 12, т.е. системное напряжение VH, должно быть задано более высоким, чем напряжение, необходимое электродвигателю (индуцированное напряжение). В то же время ограниченное значение (максимальное значение VH) присутствует в напряжении, повышаемом конвертером 12, т.е. в системном напряжении.
Поэтому способ управления синусоидальной PWM или способ управления PWM с перемодуляцией главным образом применяется в области, где напряжение, необходимое электродвигателю (индуцированное напряжение), ниже, чем максимальное значение (максимальное напряжение VH), и управление током электродвигателя в соответствии со структурной схемой на Фиг.2 выполняется в этой области, чтобы обеспечить выходной крутящий момент, соответствующий значению команды, крутящему моменту Tqcom.
В основном в этом режиме двигатель-генератор переменного тока работает с максимальным КПД, и по мере необходимости значение задания потери в электродвигателе Mlcom задается больше нуля (Mlcom>0). Таким образом, фаза тока электродвигателя изменяется для увеличения потери мощности в двигатель-генераторе переменного тока так, что предотвращается генерирование чрезмерной рекуперативной мощности в двигатель-генераторе переменного тока. Эти метод и режим выполняются так же, как уже было представлено ранее в связи с первым и вторым вариантами осуществления и их модификациями.
Между тем, если напряжение, необходимое электродвигателю (индуцированное напряжение), достигает максимального значения (максимальное напряжение VH) системного напряжения, применяется способ управления напряжением прямоугольной формы в соответствии с управлением с ослаблением магнитного поля при поддержании системного напряжения VH. В способе управления напряжением прямоугольной формы, поскольку амплитуда основной волновой гармоники является фиксированной, управление крутящим моментом производится управлением фазой напряжения импульса прямоугольного сигнала на основе значения выполнения крутящего момента, полученного вычислением мощности, и значения команды крутящему моменту.
Как показано на блок-схеме на Фиг.14, электронный управляющий блок (ECU) (не показан) вычисляет значение Tqcom команды крутящему моменту двигатель-генератора переменного тока на основании выходной мощности, необходимой транспортному средству, на основе степени нажатия на акселератор или т.п. (этап S400). В ответ на это управляющее устройство 50 на этапе S410 вычисляет напряжение, необходимое электродвигателю (индуцированное напряжения), на основании значения Tqcom команды крутящему моменту и скорости вращения Nmt двигатель-генератора переменного тока на основе таблицы или т.п., уже заданной.
Дополнительно, управляющее устройство 50 для управления электродвигателем выбирает способ управления напряжением прямоугольной формы (управление с ослаблением магнитного поля) или управление током электродвигателя (способ управления синусоидальной PWM/способ управления PWM с перемодуляцией) в соответствии с взаимосвязью между напряжением, необходимым электродвигателю, и максимальным значением (максимальное напряжение VH) на этапе S420. Выбор способа управления синусоидальной PWM или способа управления PWM с перемодуляцией для управления током электродвигателя производится в соответствии с диапазоном необходимого коэффициента модуляции. В соответствии с упомянутой выше логикой управления соответствующий способ управления выбирается из ряда способов управления, представленных на Фиг.13, в соответствии с рабочим состоянием двигатель-генератора переменного тока.
Поэтому, как показано на Фиг.15, применяемый способ управления определяется в соответствии с рабочей областью (скорость вращения/крутящий момент) двигатель-генератора переменного тока. Способ управления синусоидальной PWM применяется в диапазоне А1 низких скоростей вращения с целью снижения колебаний крутящего момента. Способ управления PWM с перемодуляцией применяется в диапазоне А2 средних скоростей вращения, а способ управления напряжением прямоугольной формы используется в диапазоне высоких скоростей вращения А3. В частности, применение способа управления PWM с перемодуляцией и способа управления напряжением прямоугольной формы увеличивает выходную мощность двигатель-генератора переменного тока.
В способе управления синусоидальной PWM и способе управления PWM с перемодуляцией, как описано выше, производится управление с обратной связью по току электродвигателя, как показано на структурной схеме на Фиг.2. Напротив, в способе управления напряжением прямоугольной формы управление двигатель-генератором переменного тока происходит в соответствии со структурной схемой на Фиг.16.
По Фиг.16 блок 400 управления напряжением прямоугольной формы включает в себя блок 410 вычисления мощности, блок 420 вычисления крутящего момента, блок 430 вычисления PI, генератор 440 прямоугольного сигнала и блок 450 генерирования сигнала.
Блок 410 вычисления мощности вычисляет мощность Pmt, подаваемую электродвигателю в соответствии со следующим уравнением (2) на основании каждой фазы напряжения iv, iw и iu (= -(iv + iw)), детектируемого датчиком 27 тока, и каждой фазы напряжения Vu, Vv, Vw
Блок 420 вычисления крутящего момента вычисляет значение Trq оценки крутящего момента в соответствии со следующим уравнением (3) с использованием мощности Pmt, подаваемой электродвигателю, полученной блоком 410 вычисления мощности, и угловой скорости ω, вычисленной на основании угла поворота θ двигатель-генератора переменного тока, детектируемого датчиком 28 угла вращения
Блок 430 вычисления PI принимает отклонение ΔTrq крутящего момента по отношению к значению Trqcom (ΔTrq = Trqcom - Trq) команды крутящему моменту. Блок 430 вычисления PI выполняет вычисление PI с заданным коэффициентом усиления по отклонению ΔTrq для получения управляющего отклонения и задает фазу ϕv напряжения прямоугольной формы в зависимости от полученного управляющего отклонения.
А именно: фаза ϕv напряжения определяется в зависимости от значения Tqcom команды крутящему моменту в соответствии с изменением характеристик фазы ϕv напряжения и выходного крутящего момента, как показано на Фиг.17. Таким образом, при создании положительного крутящего момента (Tqcom>0) фаза напряжения является опережающей при недостаточном крутящем моменте и фаза напряжения является отстающей при чрезмерном крутящем моменте. Кроме того, при создании отрицательного крутящего момента (Tqcom<0) фаза напряжения является отстающей при недостаточном крутящем моменте и фаза напряжения является опережающей при чрезмерном крутящем моменте.
Генератор 440 прямоугольного сигнала генерирует значение команды по напряжению для каждой фазы напряжения (импульс прямоугольного сигнала) Vu, Vv или Vw в соответствии с фазой ϕv напряжения, заданной блоком 430 вычисления PI. Блок 450 генерирования сигнала генерирует управляющие сигналы S11-S16 переключения в соответствии со значением команды по напряжению для каждой фазы Vu, Vv или Vw. Инвертор 20 выполняет операцию переключения в соответствии с управляющими сигналами S11-S16 переключения, так что импульс прямоугольного сигнала в соответствии с фазой ϕv напряжения используется в качестве напряжения каждой фазы электродвигателя.
Как отмечалось выше, в способе управления напряжением прямоугольной формы управление крутящим моментом двигатель-генератором переменного тока может производиться управлением с обратной связью по крутящему моменту (мощности). Тем не менее, в способе управления напряжением прямоугольной формы прикладываемое к электродвигателю напряжение управляется только путем изменения фазы, поэтому отклик на управляющее воздействие ухудшается по сравнению со способом управления широтно-импульсной модуляцией (PWM), в котором можно управлять как фазой прикладываемого к электродвигателю напряжения, так и его амплитудой.
На Фиг.18 приведена концептуальная диаграмма, которую можно сравнить с изображенной на Фиг.3, представляющая текущие рабочие точки в способе управления напряжением прямоугольной формы.
По Фиг.18 в способе управления напряжением прямоугольной формы фаза тока принимает фиксированное нерегулируемое значение, а текущие рабочие точки расположены в области 460. Таким образом, в способе управления напряжением прямоугольной формы невозможно выполнять управление потерей мощности, которое может произвольно изменять потерю мощности в двигатель-генераторе переменного тока, о чем уже упоминалось в связи с первым и вторым вариантами осуществления и его модификацией.
Поэтому третий вариант осуществления будет представлен для управления потерей мощности двигатель-генератора переменного тока в рабочей области, которая обычно соответствует способу управления напряжением прямоугольной формы в способе управления электродвигателем, при условии, что переключение между способом управления током электродвигателя и способом управления напряжением прямоугольной формы производится в соответствии с рабочей областью.
На Фиг.19 показан ряд характеристических линий 480, представляющих характеристики изменения линейного напряжения электродвигателя, пересекающие линии электродвигателя в двигатель-генераторе переменного тока относительно фазы тока. Как следует из Фиг.19, создаваемый крутящий момент постоянен, линейное напряжение электродвигателя может быть понижено заданием текущей рабочей точки с опережением. В частности, текущая рабочая точка может быть задана в области 470, находящейся с опережением по фазе тока по отношению к области 460 текущей рабочей точки в способе управления напряжением прямоугольной формы, поэтому линейное напряжение электродвигателя может быть понижено.
Например, если создаваемый крутящий момент постоянен, текущая рабочая точка может быть смещена с текущей рабочей точки ОР1 в способе управления напряжением прямоугольной формы в опережающую текущую рабочую точку ОР2, при этом линейное напряжение электродвигателя может быть уменьшено на величину ΔV. Это означает следующее. Когда управление током электродвигателя (Фиг.2) выполняется в соответствии со способом управления PWM для назначения положения текущей рабочей точки в область 470, КПД электропривода может быть дополнительно снижен при обеспечении управления крутящим моментом, а потеря мощности в двигатель-генераторе переменного тока может быть увеличена для гашения рекуперативной мощности.
На Фиг.20 приведена блок-схема, представляющая способ управления электродвигателем в системе управления электроприводом в соответствии с третьим вариантом осуществления.
На Фиг.20 управляющее устройство 50 выбирает способ управления током или способ управления напряжением прямоугольной формы для режима управления электродвигателем, как показано на Фиг.13-15 на этапе S500. Дополнительно, управляющее устройство 50 определяет значение Mlcom задания увеличения потери в электродвигателе в соответствии с первым и вторым вариантами осуществления и их модификацией на этапе S510.
На этапе S520 управляющее устройство 50 определяет, был ли выбран способ управления напряжением прямоугольной формы на этапе S500 или нет. Если способ управления напряжением прямоугольной формы не был выбран, т.е. если выбран способ управления током (НЕТ на этапе S520), значения команды по току определяются в соответствии с первым вариантом осуществления на основе значения Tqcom команды крутящему моменту и значения Mlcom задания увеличения потери в электродвигателе на этапе S530. Дополнительно, управляющее устройство 50 выполняет управление электродвигателем с обратной связью по току, показанное на Фиг.2, в соответствии со значениями (Idcom и Iqcom) команды по току, определенными на этапе S540.
Если выбран способ управления напряжением прямоугольной формы (ДА на этапе S520), управляющее устройство 50 определяет, превышает или нет значение Mlcom задания увеличения потери в электродвигателе определяющее значение Pth (на этапе S550). Например, определяющее значение Pth задано соответствующим потери мощности в способе управления напряжением прямоугольной формы.
Если значение Mlcom равно или меньше значения Pth (НЕТ на этапе S550), нет необходимости в специальном увеличении потери мощности в двигатель-генераторе переменного тока, т.к. управляющее устройство 50 выполняет способ управления напряжением прямоугольной формы в соответствии с диаграммой управления на Фиг.15 на этапе S570, и поэтому управляет двигатель-генератором переменного тока для создания выходного крутящего момента в соответствии со значением Tqcom команды крутящему моменту.
Напротив, если Mlcom больше Pth (ДА на этапе S550), т.е. когда потеря мощности, которая должна быть создана в двигатель-генераторе переменного тока, с точки зрения баланса мощности в системе электропривода, превысила потерю мощности, вызванную в соответствии со способом управления напряжением прямоугольной формы, управляющее устройство 50 определяет значение команды по току на этапе S560 для выполнения управления электродвигателем с обратной связью по току вместо управления напряжением прямоугольной формы.
На этапе S560 управляющее устройство 50 определяет значение команды по току, соответствующее значению Mlcom задания увеличения потери в электродвигателе в области 470 опережающей фазы тока, показанной на Фиг.19. Например, текущие рабочие точки заданы на характеристических линиях увеличения потери, подобных линиям CL1-CL3 на Фиг.3. Подготовив таблицу, аналогичную таблице TBL (Фиг.4), можно определить значения Idcom и Iqcom команды по току по осям 'd' и 'q' для вышеназванного значения команды по току в соответствии со значением Tqcom команды крутящему моменту и значением Mlcom задания увеличения потери в электродвигателе.
На этапе S540 управляющее устройство 50 выполняет управление электродвигателем с обратной связью по току, как показано на Фиг.2, в соответствии со значениями (Idcom и Iqcom) команды по току, определенными на этапе S560, вместо управления напряжением прямоугольной формы, выбранного на этапе S500.
В системе электропривода в соответствии с третьим вариантом осуществления, как описано выше, может избирательно использоваться управление током электродвигателя для электродвигателя, работающего в основном с оптимальным КПД, и управление напряжением прямоугольной формы для обеспечения выходных характеристик электродвигателя в диапазоне высоких скоростей, и тем самым рабочая область двигатель-генератора переменного тока может быть расширена. Дополнительно, когда потеря мощности должна быть увеличена при использовании способа управления напряжением прямоугольной формы, вместо управления напряжением прямоугольной формы может применяться управление током электродвигателя в области, где фаза тока дополнительно является опережающей по сравнению со способом управления напряжением прямоугольной формы. Поэтому в любой части расширенной рабочей области избыточная мощность может быть израсходована путем намеренного увеличения потери в двигатель-генераторе переменного тока. Следовательно, возможно обеспечить выходные характеристики в диапазоне высоких скоростей с применением способа управления напряжением прямоугольной формы и предотвратить генерирование перенапряжения в системе электропривода, которое может произойти из-за чрезмерного увеличения рекуперативной мощности в двигатель-генераторе переменного тока.
Соотношение между изобретением и примером структуры, представленным как третий вариант осуществления, является следующим. Блок 400 управления напряжением прямоугольной формы на Фиг.16 соответствует «средству управления напряжением прямоугольной формы» в изобретении. На блок-схеме на Фиг.20 этап S500 соответствует «средству выбора режима управления» в изобретении, этапы S540-S560 соответствуют «средству коррекции режима управления».
[Четвертый вариант осуществления]
Четвертый вариант осуществления будет представлен ниже в связи со структурой управления в системе электропривода со множеством электродвигателей переменного тока, подключенных для подачи и получения мощности двунаправленно к/от общего источника питания, и, в частности, со структурой управления для предотвращения перенапряжения из-за генерирования чрезмерной рекуперативной мощности от электродвигателя переменного тока.
На Фиг.21 представлена блок-схема, иллюстрирующая структуру гибридного автомобиля 100#, оборудованного системой электропривода в соответствии с четвертым вариантом осуществления.
На Фиг.21 гибридный автомобиль 100#, оборудованный системой электропривода в соответствии с четвертым вариантом осуществления, включает в себя устройство 3 разделения мощности, двигатель 4, двигатели-генераторы MG1 и MG2 (двигатели переменного тока), приводной вал 62 и приводное колесо 65. Приводной вал 62 и приводное колесо 65 составляют нагрузку 60 системы электропривода.
Гибридный автомобиль дополнительно включает в себя блок 10# генерирования напряжения постоянного тока, сглаживающий конденсатор С0, инверторы 20 и 30 и управляющий блок 50#.
Блок 10# генерирования напряжения постоянного тока имеет, по существу, ту же структуру, что и блок, представленный на Фиг.1, и подключен к линии заземления 5 и линии питания 7.
Двигатель-генератор MG1 имеет, по существу, ту же структуру, что и двигатель-генератор переменного тока на Фиг.1, и включает в себя U-, V- и W-фазные катушечные обмотки U1,V1 и W1, расположенные как на статоре, так и на роторе (не показаны). Концы на одной стороне U-,V- и W-фазных катушечных обмоток U1,V1 и W1 соединены вместе в нейтральной точке N1, другие их концы подключены к U-,V- и W-фазным плечам 22,24 и 26 инвертора 20 соответственно. Переключающие элементы Q11-Q16 выполняют операцию переключения в ответ на управляющие сигналы S11-S16 переключения, выдаваемые управляющим устройством 50#, поэтому инвертор 20 выполняет двунаправленное преобразование мощности между блоком 10# генерирования напряжения постоянного тока и двигателем-генератором MG1.
Инвертор 30 имеет, по существу, ту же структуру, что и инвертор 20, и включает в себя переключающие элементы Q21-Q26, управляемые на включение/выключение управляющими сигналами S21-S26, а также встречно-параллельные диоды D21-D26.
Двигатель-генератор MG2 имеет, по существу, ту же структуру, что и двигатель-генератор MG1, и включает в себя U-,V- и W-фазные катушечные обмотки U2,V2 и W2, расположенные как на статоре, так и на роторе (не показан). Как и в двигатель-генераторе MG1, концы на одной стороне U-,V- и W-фазных катушечных обмоток U2,V2 и W2 соединены вместе в нейтральной точке N2, другие их концы подключены к U-,V- и W-фазным плечам 32, 34 и 36 инвертора 30 соответственно.
Переключающие элементы Q21-Q26 выполняют переключения в ответ на управляющие сигналы S21-S26 переключения, выдаваемые управляющим устройством 50#, поэтому инвертор 30 выполняет двунаправленное преобразование мощности между блоком 10# генерирования напряжения постоянного тока и двигатель-генератором MG2.
Устройство 3 разделения мощности соединено с двигателем 4 и двигателями-генераторами MG1 и MG2 для распределения мощности между ними. Например, устройство 3 разделения мощности может быть сформировано из планетарного передаточного механизма с тремя осями вращения центрального зубчатого колеса, планетарного зубчатого колеса и кольцевого зубчатого колеса. Эти три оси вращения соединены с осями вращения двигателя 4 и двигатель-генераторов MG1 и MG2 соответственно. Например, ротор двигатель-генератора MG1 имеет пустотелую конструкцию, через которую соосно проходит коленчатый вал двигателя 4, так что двигатель 4 и двигатель-генераторы MG1 и MG2 могут быть механически соединены с устройством 3 разделения мощности.
Вал вращения двигатель-генератора MG2 соединен с приводным валом 62 через понижающую передачу и рабочую передачу (обе не показаны). Понижающие передачи для вала вращения двигатель-генератора MG2 могут быть встроены в устройство 3 разделения мощности.
Двигатель-генератор MG1 входит в состав гибридного автомобиля 100# для работы в качестве электрогенератора, приводимого в действие двигателем 4, а также в качестве электродвигателя для запуска двигателя 4. Двигатель-генератор MG2 входит в состав гибридного автомобиля 100# для приведения в движение приводного колеса 65.
В каждом из двигатель-генераторов MG1 и MG2 имеется датчик 27 тока и датчик 28 угла поворота (датчик положения) подобно двигатель-генератору переменного тока (Фиг.1). Эти датчики детектируют ток электродвигателя MCRT(1) и угол поворота ротора θ(1) двигатель-генератора MG1, а также ток электродвигателя MCRT(2) и угол поворота ротора θ(2) двигатель-генератора MG2 и передают эти сигналы в управляющее устройство 50#.
Подобно управляющему устройству 50, управляющее устройство 50# принимает значение Vb напряжения постоянного тока источника питания В постоянного тока, детектированного датчиком 10 напряжения, и значение системного напряжения VH, детектированного датчиком 13 напряжения, а также информацию, связанную с источником питания В постоянного тока, например, о состоянии зарядки (SOC), и допустимое количество входной мощности Win, указывающее ограничение заряда.
Дополнительно, управляющее устройство 50# принимает значение Tqcom(1) команды крутящему моменту двигатель-генератора MG1 и управляющий сигнал RGE(1), сообщающий о его рекуперативном режиме, а также значение Tqcom(2) команды крутящему моменту двигатель-генератора MG2 и управляющий сигнал RGE(2), сообщающий о его рекуперативном режиме.
Управляющее устройство 50# включает в себя управляющее устройство 50(1) для управления двигатель-генератором MG1 и управляющее устройство 50(2) для управления двигатель-генератором MG2. Управляющее устройство 50(1) имеет, по существу, ту же структуру управления, что и управляющее устройство 50, показанное на Фиг.1, и поэтому создает управляющие сигналы S11-S16 переключения для инвертора 20, так что двигатель-генератор MG1 может работать в соответствии со значениями команд. Аналогично, управляющее устройство 50(2) имеет, по существу, ту же структуру управления, что и управляющее устройство 50, поэтому создает управляющие сигналы S21-S26 переключения для инвертора 30, так что двигатель-генератор MG2 может работать в соответствии со значениями команд.
Система электропривода, представленная на Фиг.21, сконфигурирована таким образом, что рекуперативные мощности от множества двигатель-генераторов MG1 и MG2 могут подаваться в общий источник питания В постоянного тока. Поэтому для намеренного увеличения потерь мощности в соответствующих двигатель-генераторах MG1 и MG2, подобно первому, второму и третьему вариантам осуществления, необходимо определить избыточные мощности (т.е. значения задания увеличения потери мощности в электродвигателе) для расходования соответствующими двигатель-генераторами при мониторинге баланса мощности двигатель-генераторов MG1 и MG2 в целом.
На Фиг.22 приведена блок-схема, иллюстрирующая способ определения значения задания потери мощности в электродвигателе в каждом из двигатель-генераторов MG1 и MG2 в системе электропривода в соответствии с четвертым вариантом осуществления.
На Фиг. 22 управляющее устройство 50# оценивает входную/выходную мощностей Pmg(1) и Pmg(2) в соответствующих двигатель-генераторах (электродвигателях переменного тока) MG1 и MG2 в соответствии с уравнением (1) на этапе S600. Каждая входная/выходная мощность Pmg(1) и Pmg(2) принимает положительное значение, когда соответствующий двигатель-генератор выполняет рекуперативный режим (генерирование мощности), и принимает отрицательное значение при работе под нагрузкой.
На этапе s610 управляющее устройство 50# получает сумму входной/выходной мощностей Pmg(1) и Pmg(2), полученных на этапе S600, и поэтому вычисляет полный баланс мощности Pmg = Pmg(1) + Pmg(2) двигатель-генераторов MG1 и MG2. Поэтому, даже когда один из двигатель-генераторов (электродвигателей переменного тока) выполняет работу под нагрузкой для снижения мощности, возможно контролировать, производит ли вся система избыточную мощность, когда другой двигатель-генератор (электродвигатель переменного тока) генерирует мощность.
На этапе S620 управляющее устройство 50# задает необходимую величину Mlttl увеличения потери, соответствующую избыточной мощности двигатель-генераторов MG1 и MG2 в целом, на основе сравнения баланса мощности Pmg двигатель-генераторов MG1 и MG2 в целом и величины Pin (Pin≥0) рекуперируемой мощности на входе системы электропривода 100#.
Более точно, на этапе S620 необходимая величина Mlttl увеличения потери задается равной нулю (Mlttl=0) в случае (Pmg≤ Pin) и задается больше нуля (Mlttl>0) в случае (Pmg> Pin). В этой обработке данных предпочтительно задавать необходимую величину Mlttl увеличения потери в соответствии с полным балансом мощности Pmg относительно возможной рекуперативной мощности Pin.
На этапе S620 необходимая величина Mlttl увеличения потери всего электродвигателя может быть определена дополнительно отражением детектирования системного напряжения VH датчиком 13 напряжения, подобно второму варианту осуществления. Альтернативно, необходимая величина Mlttl увеличения потери может быть увеличена в соответствии с силой торможения транспортного средства, заданной водителем, подобно модификации второго варианта осуществления.
На этапе S630 управляющее устройство 50# задает избыточные мощности, которые необходимо израсходовать соответствующими двигатель-генераторами MG1 и MG2 с необходимой величиной Mlttl увеличения потери, и таким образом задает команды увеличения потери для соответствующих двигатель-генераторов MG1 и MG2, так что двигатель-генераторы MG1 и MG2 в целом могут потребить избыточную мощность двигатель-генераторов MG1 и MG2 в целом, полученную на этапе 620.
В первом методе команда увеличения потери в электродвигателе может быть распределена между двигатель-генераторами MG1 и MG2 в соответствии со следующим уравнением (4), так что потерю в электродвигателе можно увеличить в приоритетном порядке в двигатель-генераторе MG2, соединенном с приводным валом 62, для непосредственного вывода крутящего момента
В частности, когда необходимая величина Mlttl увеличения потери увеличивается в ответ на силу торможения транспортного средства, заданную водителем, двигатель-генератор MG2 в приоритетном порядке увеличивает потерю в электродвигателе, так что ощущение торможения транспортного средства может усиливаться, подобно модификации второго варианта осуществления.
В качестве второго метода необходимая величина Mlttl увеличения потери в электродвигателе в целом может быть определена для ее распределения между двигатель-генераторами MG1 и MG2 в соответствии с уравнением (5):
В частности, в соответствии со вторым методом возможно уменьшить избыточную мощность, потребляемую каждым двигатель-генератором (электродвигателем переменного тока), поэтому возможно ожидать сокращения времени перехода, требуемого для изменения рабочего состояния от оптимального КПД к увеличению потери, и ожидать гашения колебаний крутящего момента. Дополнительно возможно гасить теплоотдачу в каждом двигатель-генераторе, так что баланс мощности всей системы электропривода в целом может быть улучшен более плавно. Дополнительно, величина гашения рекуперативной мощности может быть надежно увеличена по сравнению со случаем, когда потеря мощности увеличивается за счет концентрированного потребления избыточной мощности в одном двигатель-генераторе (электродвигателе переменного тока).
После определения значений Mlcom(1) и Mlcom(2) задания увеличения потери в соответствующих двигатель-генераторах MG1 и MG2 на этапе S630 управляющее устройство 50(1) управляет двигатель-генератором MG1 на основе значения Tqcom(1) команды крутящему моменту и значения Mlcom(1) задания увеличения потери в электродвигателе. Аналогично, управляющее устройство 50(2) управляет двигатель-генератором MG2 на основе значения Tqcom(2) команды крутящему моменту и значения Mlcom(2) задания увеличения потери в электродвигателе. Операции управления управляющих устройств 50(1) и 50(2), основанные на значениях команды крутящему моменту и значениях задания увеличения потери мощности в электродвигателе, являются, по существу, такими же, что приведены в описаниях в связи с первым или третьим вариантами осуществления, и поэтому здесь повторно не приводятся.
В данном варианте осуществления, поскольку каждый двигатель-генератор может потреблять избыточную мощность независимо от рабочего состояния (рекуперативный режим или работа под напряжением), двигатель-генераторы могут потреблять избыточную мощность всей системы электропривода в целом в хорошо сбалансированном виде. Таким образом, распределение избыточной мощности в соответствии с упоминаемым выше вторым методом может происходить плавно.
Соотношение между изобретением и структурой, представленной в качестве примера в четвертом варианте осуществления, является следующим. На Фиг.21 двигатель-генераторы MG1 и MG2 соответствуют «множеству электродвигателей переменного тока» в данном изобретении, каждый из инверторов 20 и 30 соответствует «контуру электропривода» в данном изобретении, каждое из управляющих устройств 50(1) или 50(2) соответствует «средству управления электродвигателем» в данном изобретении. Этапы S620 и S630 на Фиг.22 соответствуют «средствам распределения» в данном изобретении.
[Пятый вариант осуществления]
Пятый вариант осуществления будет представлен в связи с предпочтительным способом распределения потребляемой избыточной мощности между множеством электродвигателей переменного тока, которые используются в системе электропривода и описаны в связи с четвертым вариантом осуществления.
Пятый вариант осуществления будет представлен в связи с предпочтительным распределением потребляемой избыточной мощности между двигатель-генераторами MG1 и MG2 в системе электропривода, представленной на Фиг.21. Способ распределения потребляемой избыточной мощности между двигатель-генераторами MG1 и MG2, как описывается ниже, выполняется управляющим устройством 50# в качестве подпрограммы, соответствующей обработке данных на этапе S630 в способе определения значения задания увеличения потери в каждом двигатель-генераторе, показанном на Фиг.22.
(Распределение, основанное на потребляемой избыточной мощности)
На Фиг.23 будет приведено описание (пример первый) по способу определения значения задания потери мощности в электродвигателе в пределах диапазона потребляемой избыточной мощности для каждого двигатель-генератора.
На Фиг.23 управляющее устройство 50# вычисляет потребляемую избыточную мощность Pmax1 или Pmax2, являющуюся максимальным значением имеющейся потребляемой избыточной мощности для соответствующих двигатель-генераторов MG1 и MG2 на основе текущего рабочего состояния и особенно на основании текущей рабочей точки (крутящий момент и фаза тока) на этапе S700.
Способ вычисления потребляемых избыточных мощностей Pmax1 и Pmax2 будет представлен со ссылкой на Фиг.24.
На Фиг.24 представлены характеристики фаза тока - крутящий момент, аналогично Фиг.3. В соответствии с вариантом осуществления изобретения каждый двигатель-генератор (представляющий далее, главным образом, двигатель-генераторы MG1 и MG2) потребляет избыточную мощность за счет изменения текущей рабочей точки для снижения КПД системы электропривода в соответствии с характеристиками фаза тока - выходной крутящий момент.
На Фиг.24 предполагается, что Р1, P2 и P3 (P1<P2<P3) представляют собой потребляемые избыточные мощности в текущих рабочих точках на характеристических линиях потери CL1, CL2 и CL3 соответственно. Если выходной крутящий момент равен Ta, потребляемая избыточная мощность превосходит P3 в соответствии с изменениями фазы тока.
Если выходной крутящий момент равен Tb (Tb>Ta), максимальное значение потребляемой избыточной мощности равно P3 в соответствии с изменениями фазы тока. Аналогично, если выходной крутящий момент равен Tc (Tc>Tb), максимальное значение потребляемой избыточной мощности равно P2 в соответствии с изменениями фазы тока. Если выходной крутящий момент равен Td (Td>Tc), максимальное значение потребляемой избыточной мощности равно P1 в соответствии с изменениями фазы тока.
Как описано выше, текущая потребляемая избыточная мощность изменяется в соответствии с рабочим состоянием каждого двигатель-генератора, а именно потребляемая избыточная мощность уменьшается при относительном увеличении выходного крутящего момента. Поэтому в соответствии с характеристическими линиями, приведенными на Фиг.24, возможно заранее подготовить таблицу, в которой задана потребляемая избыточная мощность Pmax (в основном представляющая собой Pmax1 и/или Pmax2 далее по тексту) в каждой текущей рабочей точке для каждого двигатель-генератора.
Например, возможно подготовить таблицу, в которой соответствующие разделы аналогичны разделам в таблице значений Idcom и Iqcom команд по току, представленных на Фиг.4, а значение таблицы представляет собой потребляемую избыточную мощность Pmax. В соответствии с обработкой данных на этапе S700 потребляемые избыточные мощности Pmax1 и Pmax2 могут быть вычислены с отсылкой к таблице на основе настоящей текущей рабочей точки для каждого двигатель-генератора MG1 и MG2.
На Фиг.23 на этапе S710 управляющее устройство 50# определяет команды Mlcom(1) и Mlcom(2) увеличения потери в двигатель-генераторах MG1 и MG2 в диапазонах потребляемых избыточных мощностей Pmax1 и Pmax2, определенных на этапе S700 соответственно. Таким образом, команды увеличения потери для двигатель-генераторов MG1 и MG2 определяются в соответствии со следующим уравнением (6):
Применяя эту структуру управления, избыточные мощности в диапазонах потребления можно распределить для соответствующих двигатель-генераторов таким образом, что множество двигатель-генераторов могут потреблять избыточную мощность для сохранения баланса между множеством двигатель-генераторов в соответствии с рабочим состоянием (как для рекуперативного режима, так и для работы под нагрузкой) каждого двигатель-генератора.
В гибридном автомобиле 100#, показанном на Фиг.21, выходная мощность двигатель-генератора MG2 обеспечивает приводную мощность приводного колеса 65, но выходная мощность двигатель-генератора, работающего как генератор мощности, не используется непосредственно для приведения во вращение приводного колеса 65. Поэтому колебания выходной мощности двигатель-генератора MG2, формирующего «приводной электродвигатель», оказывают непосредственное влияние на управляемость транспортного средства. С точки зрения этого различия в функциях между двигатель-генераторами MG1 и MG2 режим потребления избыточной мощности, которая изменяет ток электродвигателя, преимущественно выполняется с использованием, насколько возможно, двигатель-генератора MG1 (т.е. электродвигателя, не для приведения в движение колеса). Таким образом, способ распределения, в котором полная избыточная мощность потребляется в приоритетном порядке двигатель-генератором MG1, может устранить вероятность того, что режим потребления избыточной мощности в соответствии с данным вариантом осуществления изобретения влияет на приведение в движение транспортного средства.
Поэтому задание увеличения потери в соответствующих двигатель-генераторах на этапе S710 может включать в себя приоритеты, которые назначены двигатель-генераторам для потребления избыточной мощности, как показано на Фиг.25.
На Фиг.25 обработка данных на этапе S710, показанная на Фиг.23, преимущественно производится на этапах S720-S740.
На этапе S720 управляющее устройство 50# сравнивает величину Mlttl увеличения потери выходной мощности, соответствующую избыточной мощности двигатель-генераторов MG1 и MG2 в целом с потребляемой мощностью Pmax1, полученной на этапе S700 (Фиг.23), т.е. потребляемая мощность Pmax1 двигатель-генератора MG1, который преимущественно должен использоваться для потребления избыточной мощности.
Если (Mlttl≤Pmax1) удовлетворяет (ДА на этапе S720), двигатель-генератор MG1 может потреблять всю избыточную мощность Mlttl так, что управляющее устройство 50# распределяет потребляемую избыточную мощность в соответствии со следующей формулой (7) для потребления избыточной мощности только электродвигателем переменного тока MG1
Напротив, если (Mlttl>Pmax1) удовлетворяет (НЕТ на этапе S720), двигатель-генератор MG1, который работает прежде всего на потребление избыточной мощности, не может потреблять всю избыточную мощность, поэтому другой двигатель-генератор MG2 должен использоваться дополнительно для потребления избыточной мощности. Поэтому управляющее устройство 50# распределяет потребляемую избыточную мощность в соответствии со следующим уравнением (8) на этапе S740:
(где Mlcom(2)≤ Pmax х 2)
Благодаря структуре управления, показанной на Фиг.25, когда система применяется в гибридном автомобиле, она может устранять вероятность того, что режим потребления избыточной мощности в двигатель-генераторах повлияет на управляемость транспортного средства.
(Распределение на основе мониторинга температуры электродвигателя)
Как описывалось ранее, режим потребления избыточной мощности в каждом двигатель-генераторе MG снижает КПД электропривода и, следовательно, вызывает выделение тепла из электродвигателей. Поэтому, когда величина потребления избыточной мощности и время потребления увеличиваются, тепло, вырабатываемое внутри электродвигателя, может увеличиться, чрезмерно повышая температуру электродвигателя. В частности, в электродвигателе с постоянными магнитами, в котором постоянные магниты прикреплены к ротору, когда магнитная сила постоянного магнита значительно снижается из-за явления размагничивания, вызванного возрастанием температуры, электродвигатель не может работать правильно. Поэтому при выполнении режима потребления избыточной мощности электродвигатели, включая и другие типы электродвигателей, следует контролировать таким образом, чтобы не допустить того, что температура электродвигателя вошла в диапазон температур, вызывающий проблемы с точки зрения снижения рабочих характеристик электродвигателя и защиты элементов.
На Фиг.26 представлен способ (пример второй) определения значений задания увеличения потери мощности в соответствующих двигатель-генераторах MG1 и MG2 с отражением температуры.
На Фиг.26 управляющее устройство 50# определяет на этапе S750, превышает или нет температура Т(1) двигатель-генератора MG1 или температура Т(2) двигатель-генератора MG2 определенную температуру Tjd.
Датчики 29 температуры, расположенные в двигатель-генераторах MG1 и MG2, как показано на Фиг.27, детектируют температуру Т(1) и Т(2) соответственно. Для измерения температуры внутри электродвигателя датчик 29 температуры, в частности, для электродвигателя с постоянными магнитами расположен в таком месте, чтобы можно было детекировать температуру ротора. Таким образом, предпочтительно, чтобы датчик 29 температуры располагался в месте, где температура стремится подняться до наивысшей величины в соответствии с характеристиками электродвигателя с учетом типа и характеристик двигатель-генератора (электродвигателя переменного тока). Структуры, представленные на Фиг.27, за исключением датчика 29 температуры, который к ним добавлен, являются такими же, что и структуры, показанные на Фиг.21, поэтому их описание не повторяется.
Вернемся к Фиг.26, предпочтительно, чтобы определенная температура Tjd на этапе S750 задавалась относительно низкой в соответствии с характеристиками двигатель-генераторов (электродвигателей переменного тока), использующихся в системе, обеспечивая запас относительно температуры, вызывающей изменения в характеристиках двигателя.
Если обе температуры Т(1) и Т(2) электродвигателя ниже определенной температуры Tjd (НЕТ на этапе S750), управляющее устройство 50# выполняет обработку данных на этапах S700 и S710, подобных этапам на Фиг.23 и Фиг.25, и тем самым распределяет потребляемую избыточную мощность между двигатель-генераторами MG1 и MG2, принимая во внимание потребляемые избыточные мощности в соответствующих двигатель-генераторах MG1 и MG2.
Напротив, если одна из температур Т(1) и Т(2) электродвигателя равна или выше определенной температуры Tjd (ДА на этапе S750), управляющее устройство 50# задает команду увеличения потери Mlcom в двигатель-генераторе MG (в основном представляющий собой двигатель-генераторы MG1 и MG2 далее по тексту), у котрого температура равна или выше определенной температуры Tjd, равной нулю (Mlcom=0).
Дополнительно, на этапе S770 управляющее устройство 50# производит обработку данных, аналогично обработке на этапе S700 на Фиг.23 для двигатель-генератора MG, у которого температура электродвигателя ниже определенной температуры Tjd, и более точно вычисляет потребляемую избыточную мощность Pmax в данной временной рабочей точке. Дополнительно, на этапе S780 управляющее устройство 50# задает команду увеличения потери Mlcom в двигатель-генераторе MG для обеспечения соотношения (Mlcom≤Pmax) в диапазоне потребляемой избыточной мощности, полученной на этапе S770.
Данная структура управления может последовательно контролировать возрастание температуры двигатель-генератора, вызванное потреблением избыточной мощности, и тем самым возможно избежать режим потребления избыточной мощности, который может поднять температуру электродвигателя в диапазон высоких температур, вызывающих изменения характеристик электродвигателя. Поэтому режим потребления избыточной мощности может выполняться с обеспечением стабильности работы электродвигателя.
Дополнительно, с точки зрения отражения режима потребления избыточной мощности в температуре электродвигателя, возможно отразить температуру электродвигателя в вычислении (этап S700 на Фиг.23 и других) потребляемой избыточной мощности Pmax в каждом двигатель-генераторе. Например, потребляемая избыточная мощность Pmax может быть задана ниже исходного значения в соответствии с сокращением в запасах температур Т(1) и Т(2) электродвигателя относительно определенной температуры Tjd.
(Способ распределения с учетом времени, требуемого для потребления избыточной мощности)
Как уже было описано со ссылкой на Фиг.3 и другие, режим потребления избыточной мощности в соответствии с данным вариантом осуществления выполняется за счет изменения текущей рабочей точки. Это изменение текущей рабочей точки обязательно вызывает изменение значений команды по току Idcom и Iqcom. Однако, когда ток электродвигателя изменяется значительно в течение короткого времени, управляемость ухудшается. Поэтому с учетом стабильности управления обычно применяется определенное ограниченное значение для скорости изменения (величина изменения за единицу времени) значения команды по току. Например, блок 210 создания команды по току на Фиг.2 выполняет создание команды по току с циклом предварительно заданного значения, но при создании команды по току величина изменения значения команды по току относительно последнего значения команды по току ограничена или ниже определенного значения.
На Фиг.28 представлен способ (пример третий) определения значений задания увеличения потери в соответствующих двигатель-генераторах MG1 и MG2 с учетом времени, требуемого для потребления избыточной мощности.
На Фиг.28 управляющее устройство 50# на этапе S800 вычисляет потребляемые избыточные мощности Ptm1 и Ptm2, на которые допускается увеличение в течение определенного времени в данном рабочем состоянии и более точно в настоящем текущем состоянии двигатель-генераторов MG1 и MG2, соответственно.
Как показано на Фиг.29, когда значение команды по току изменяется на большую величину, невозможно мгновенно получить необходимое значение команды по току с точки зрения стабильности управления электродвигателем, о чем уже говорилось, и определенное время может потребоваться для изменения значения для требуемой текущей рабочей точки.
На Фиг.29 в качестве примера показано управление, выполняемое при изменении текущей рабочей точки от настоящей (время t0) текущей рабочей точки P1o до текущей рабочей точки P1a для увеличения потери (потребление избыточной мощности). В этой операции предполагается, что значение команды по току Idcom или Iqcom изменяется от Io до Ia в соответствии с изменением текущей рабочей точки от P1o до P1a.
Однако для каждого периода Tc управления имеется значение Ivmax ограничения изменения значения команды по току. Поэтому в случае ((Ia - Io)>Ivmax) невозможно создать команду по току, которая мгновенно изменит текущую рабочую точку в требуемое положение в следующем периоде управления, и следует изменять текущую рабочую точку постепенно.
Поэтому, когда между текущими рабочими точками P1o и P1a имеется большая разница в значении команды по току, требуется относительно продолжительный период для изменения настоящей текущей рабочей точки в текущую рабочую точку, задаваемую для необходимого потребления избыточной мощности (т.е. между временем t0 и t1).
Другими словами, потребляемая избыточная мощность, для которой допускается увеличение в каждой текущей рабочей точке в пределах предварительно заданного времени, может быть вычислена на основании значения в таблице значения команды по току (Фиг.4), составляемой заранее, при этом отражается и значение Ivmax ограничения изменения значения команды по току.
Поэтому, как показано на Фиг.30, возможно заранее составить таблицу, к которой будет осуществляться отсылка, для увеличиваемой потребляемой избыточной мощности за предварительно заданное время для каждой текущей рабочей точки. В соответствии с обработкой данных на этапе S800 на Фиг.28 отсылка выполняется к таблице на Фиг.30, поэтому потребляемые избыточные мощности Ptm1 и Ptm2, на которые допускается увеличение в течение предварительно заданного времени в данном рабочем состоянии (текущей рабочей точке), могут быть определены для двигатель-генераторов MG1 и MG2 соответственно.
Вернемся к Фиг.28, управляющее устройство 50# на этапе S810 определяет команды Mlcom(1) и Mlcom(2) увеличения потери в двигатель-генераторах MG1 и MG2 в пределах Ptm1 и Ptm2, полученных на этапе S800.
В соответствии с описанной выше структурой управления избыточные мощности в диапазонах, которые позволяют увеличение в течение предварительно заданного времени, могут быть распределены соответствующим двигатель-генераторам. Поэтому избыточная мощность системы в целом может быть израсходована за короткое время в соответствии с рабочим состоянием (рекуперативный режим и работа под нагрузкой) каждого двигатель-генератора.
Обработка данных на этапе S810 может иметь структуру управления, которая распределяет потребляемую избыточную мощность путем назначения приоритетов, подобных приоритетам на Фиг.25, для двигатель-генераторов, как показано на Фиг.31.
В соответствии с Фиг.31 обработка данных на этапе S810, показанная на Фиг.28, преимущественно формируется на этапах S820-S840.
На этапе S820 управляющее устройство 50# сравнивает величину Mlttl увеличения потери выходной мощности, соответствующую избыточной мощности двигатель-генераторов MG1 и MG2, с потребляемой избыточной мощностью Ptm1, полученной на этапе S800 (Фиг.28) и увеличиваемой в течение предварительно заданного времени в двигатель-генераторе MG1, который главным образом работает на потребление избыточной мощности.
В случае (Mlttl≤Ptm1) (ДА на этапе S820) двигатель-генератор MG1 может потреблять всю избыточную мощность Mlttl в течение предварительно заданного времени. Поэтому управляющее устройство 50# распределяет потребляемую избыточную мощность так, чтобы избыточная мощность потреблялась только двигатель-генератором MG1 в соответствии со следующим уравнением (9) на этапе S830:
Напротив, в случае (Mlttl>Ptm1) (НЕТ на этапе S820) невозможно израсходовать всю избыточную мощность в течение предварительно заданного времени только двигатель-генератором MG1, который главным образом работает на потребление избыточной мощности. Поэтому другой двигатель-генератор MG2 должен использоваться дополнительно для потребления избыточной мощности. Поэтому управляющее устройство 50# распределяет потребляемую избыточную мощность в соответствии с уравнением (10):
(где Mlcom(2)≤ Ptm2)
Применяя структуру управления, показанную на Фиг.31 в гибридном автомобиле, возможно устранить вероятность того, что режим потребления избыточной мощности повлияет на управляемость транспортного средства, подобно структуре управления на Фиг.25.
Естественно, потребляемые избыточные мощности Ptm1 и Ptm2, на которые допускается увеличение в течение предварительно заданного времени (см. Фиг.28 и 31), равны или меньше потребляемых избыточных мощностей Pmax1 и Pmax2, показанных на Фиг.23 соответственно (Ptm1≤ Pmax1 и Ptm2≤ Pmax2).
На блок-схеме согласно Фиг.26, поэтому этапы S800 и S810 на Фиг.28 или 31 могут выполняться вместо этапов S700 и S710 и дальнейшая обработка данных, подобная выполняемой на этапах S800 и S810, может выполняться вместо этапов S770 и S780, посредством чего возможно обеспечить структуру управления, при которой можно потреблять всю избыточную мощность в течение короткого времени при сохранении баланса в потребляемой избыточной мощности между двигатель-генераторами MG1 и MG2 и контроле чрезмерного повышения температуры электродвигателя.
Связь между изобретением и структурой, представленной в качестве примера в пятом варианте осуществления, является следующей. Этап S700 на Фиг.23 и этап S800 на Фиг.28 соответствуют «средству задания верхнего предела» в данном изобретении, этап S710 на Фиг.23, этапы S750 - S780 на Фиг.26 и этап S810 на Фиг.28 соответствуют «средству определения распределения» в данном изобретении.
В четвертом и пятом вариантах осуществления системы электропривода для гибридного транспортного средства, оснащенного двигатель-генераторами MG1 и MG2, приводились в качестве типичных примеров. Однако количество двигатель-генераторов (двигателей переменного тока) в системе электропривода такого типа не ограничивается двумя. В системе электропривода, оснащенной произвольным количеством двигатель-генераторов (двигателей переменного тока), возможно произвести распределение потребляемой избыточной мощности, которое отражает потребляемую избыточную мощность, соответствующую рабочему состоянию или потребляемую избыточную мощность, на которую допускается увеличение в течение предварительно заданного времени, а также температуру в каждом двигатель-генераторе (двигателе переменного тока), аналогично пятому варианту осуществления.
В качестве вариантов осуществления изобретения системы электропривода, установленные на гибридном транспортном средстве или автомобиле с электрическим приводом, были описаны в качестве примеров, но изобретение не ограничивается этими случаями. Таким образом, система электропривода в соответствии с данным изобретением может применяться в системах электропривода, включая двигатель переменного тока, выходная мощность которого управляется управлением с обратной связью по току электродвигателя, без ограничения количества электродвигателей переменного тока, управляемых этой системой. В частности, изобретение непосредственно применимо к системе электропривода, включающей в себя электродвигатель переменного тока, например электродвигатель с постоянными магнитами или реактивный синхронный электродвигатель, выполненные с возможностью осуществления переменного управления выходным крутящим моментом путем изменения величины и фазы тока электродвигателя.
Несмотря на то что данное изобретение было подробно описано и иллюстрировано, очевидно, что это использовалось только с целью иллюстрирования и приведения примеров и не может рассматриваться как ограничение. Объем изобретения объясняется в прилагаемой формуле изобретения.

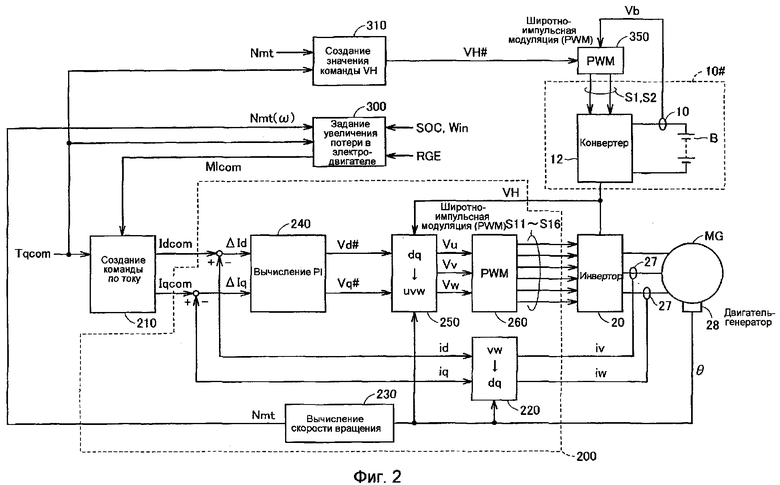
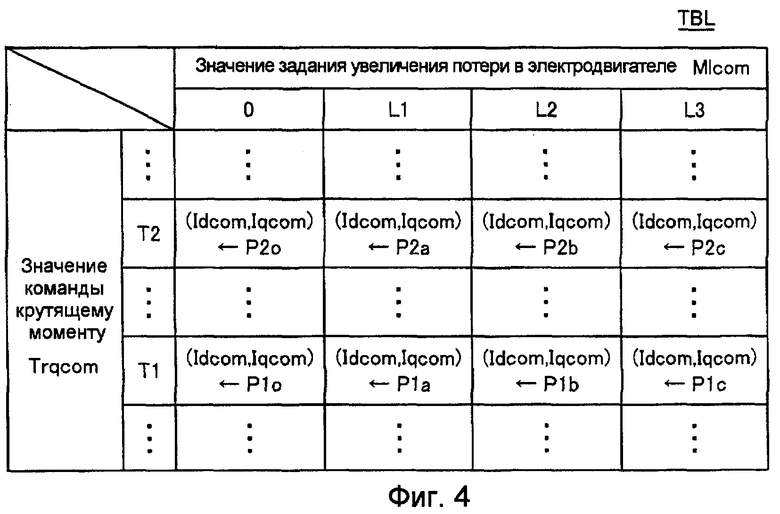
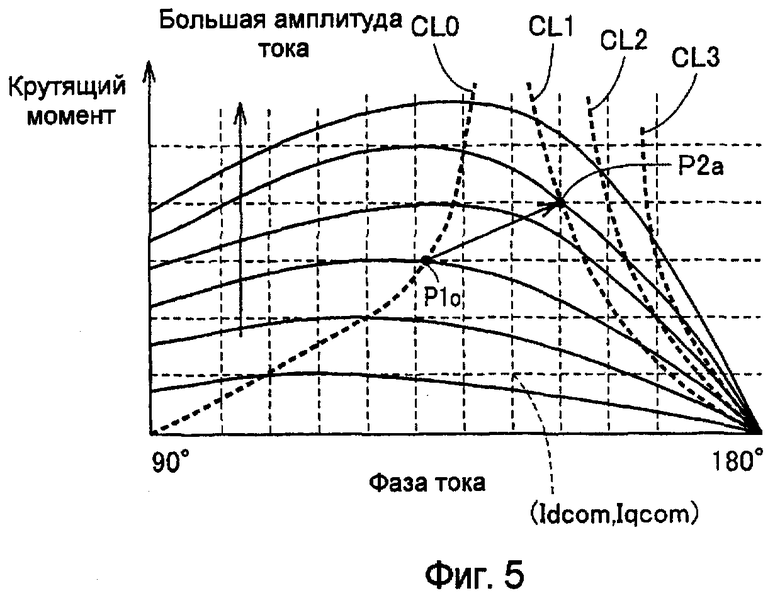
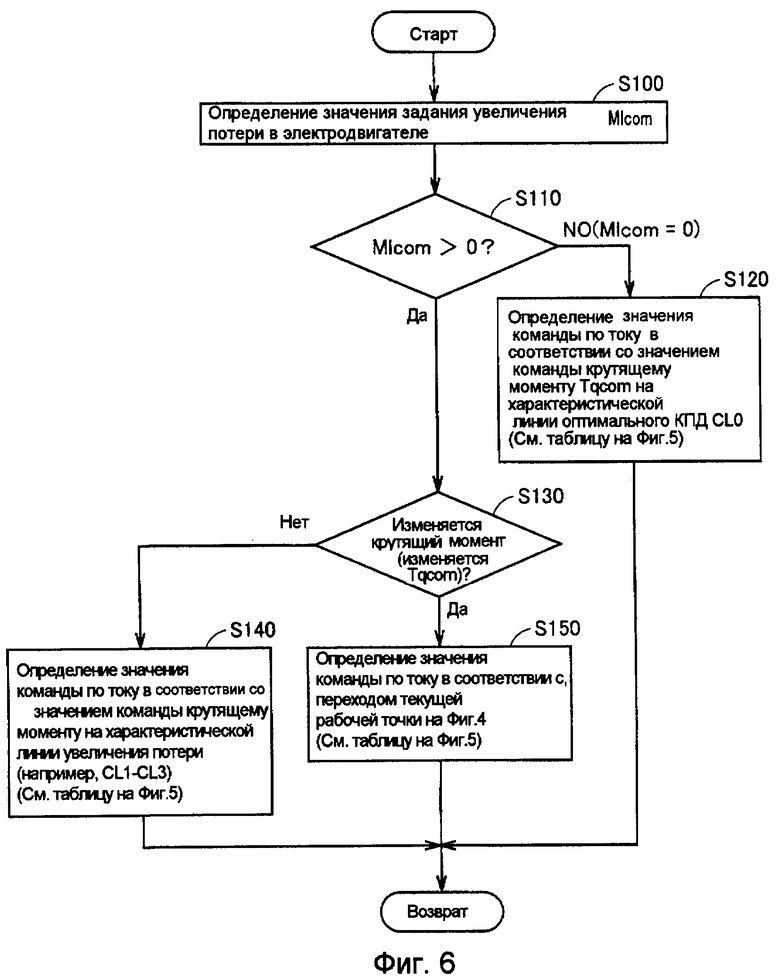
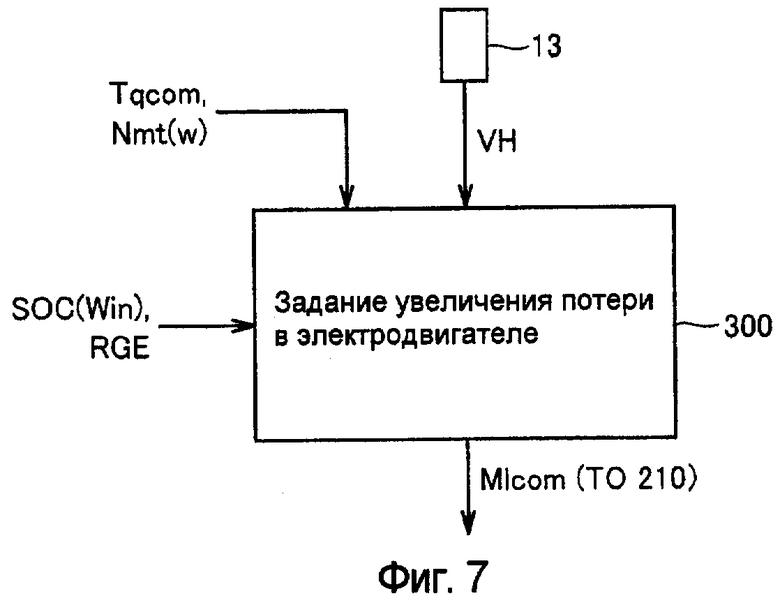
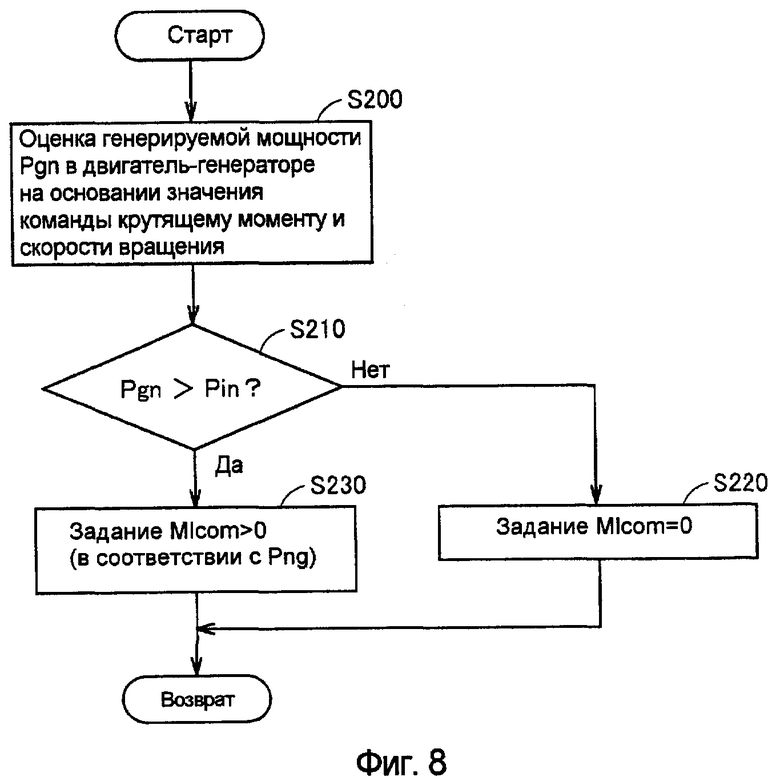
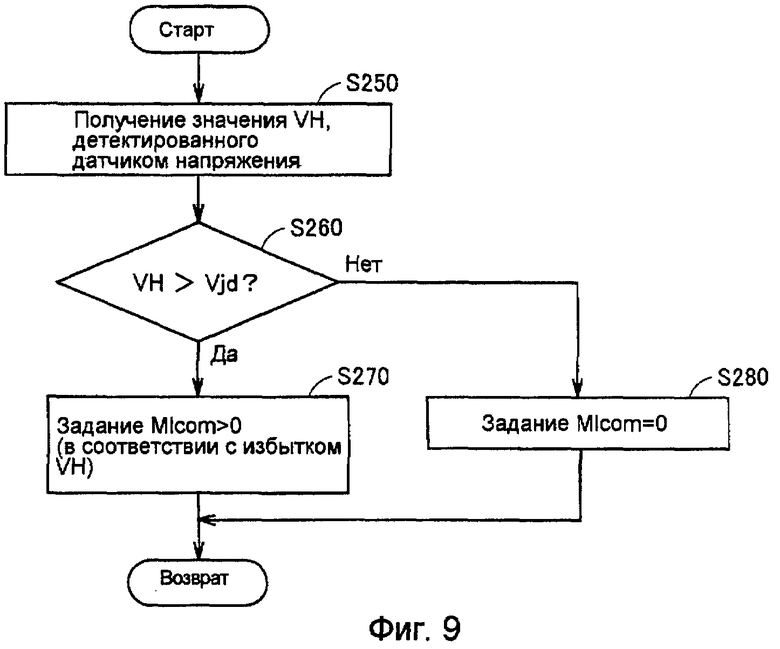

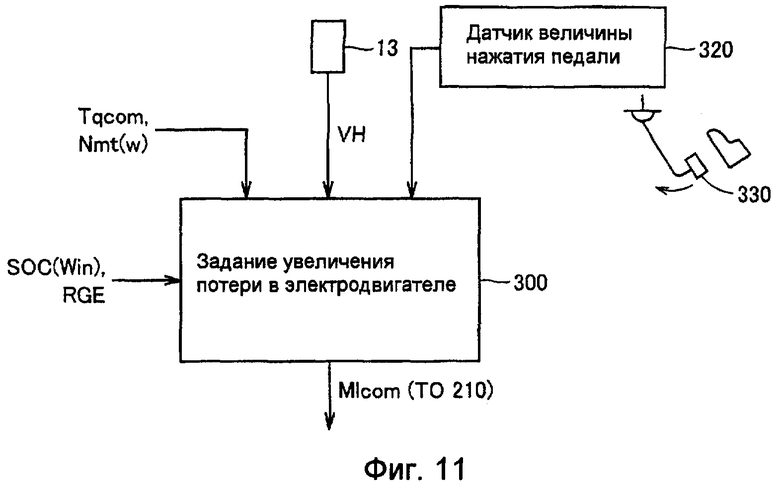
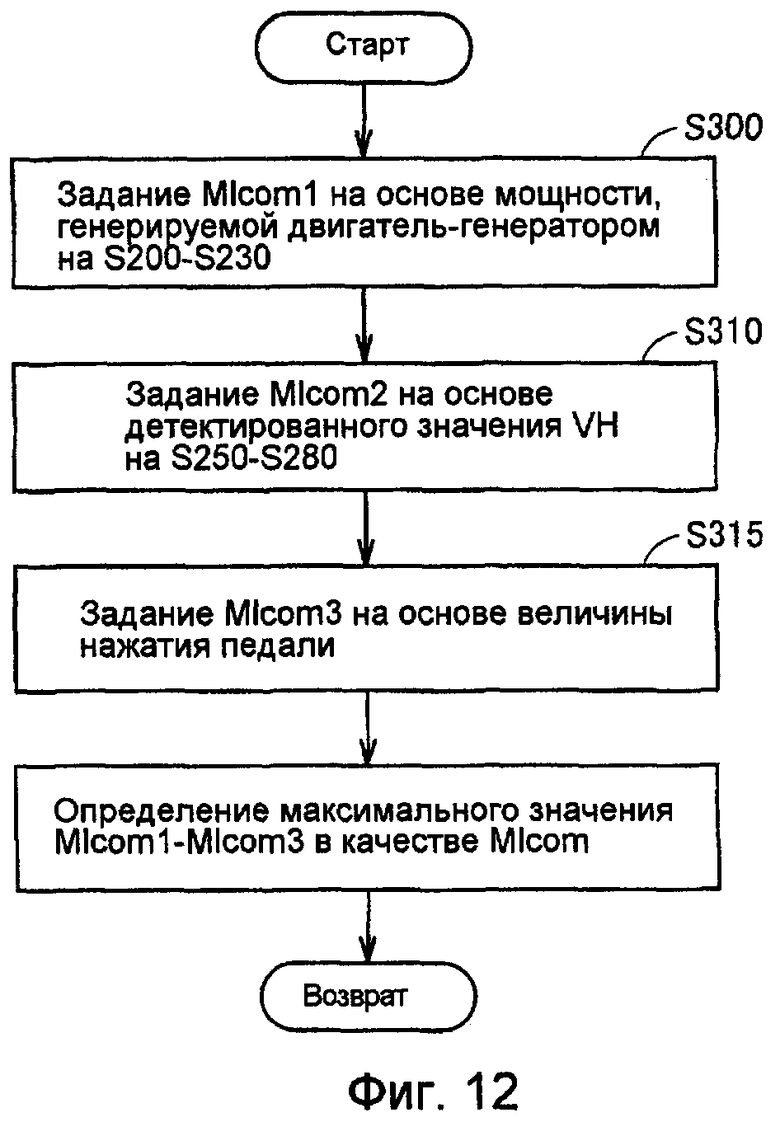
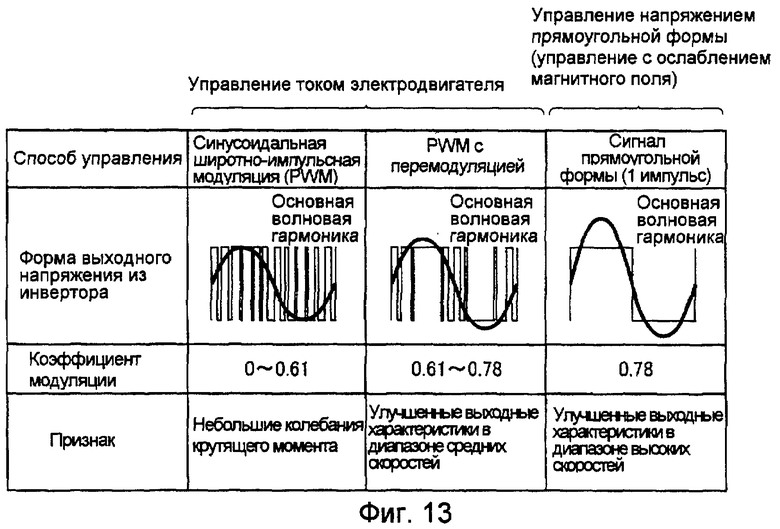
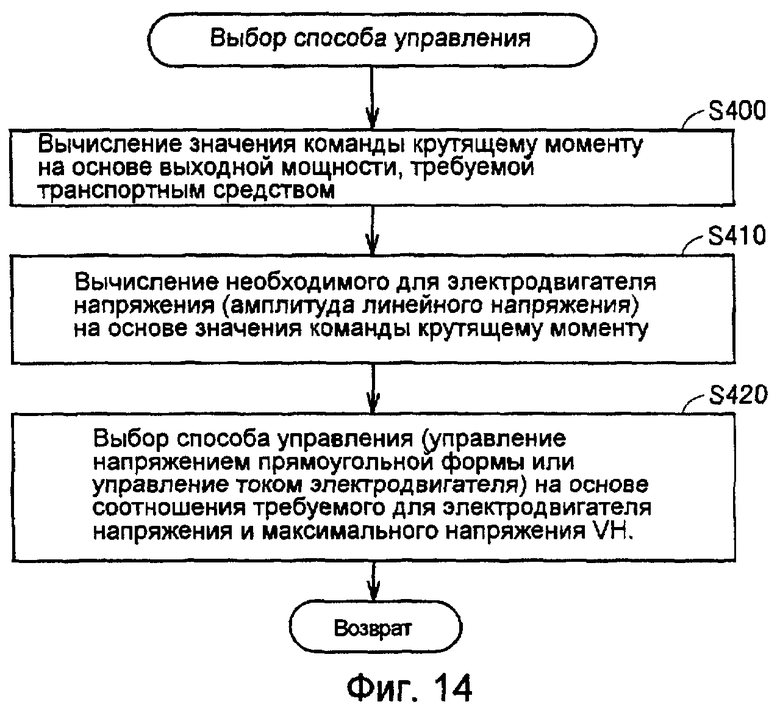
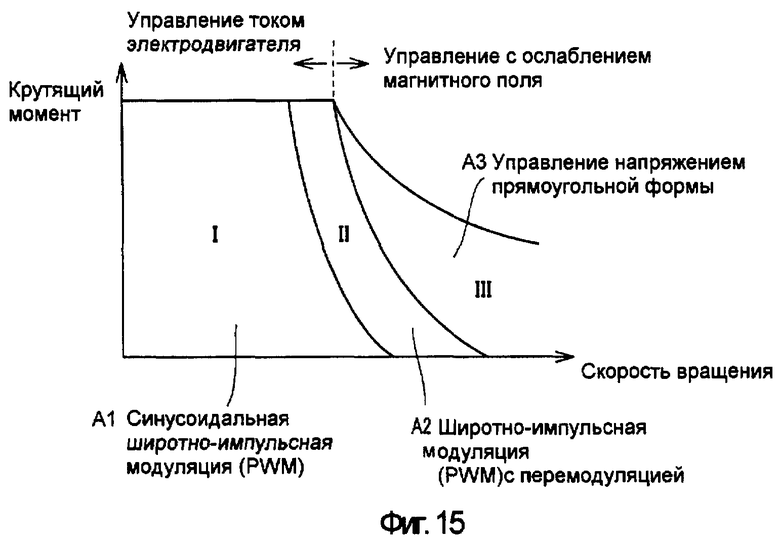
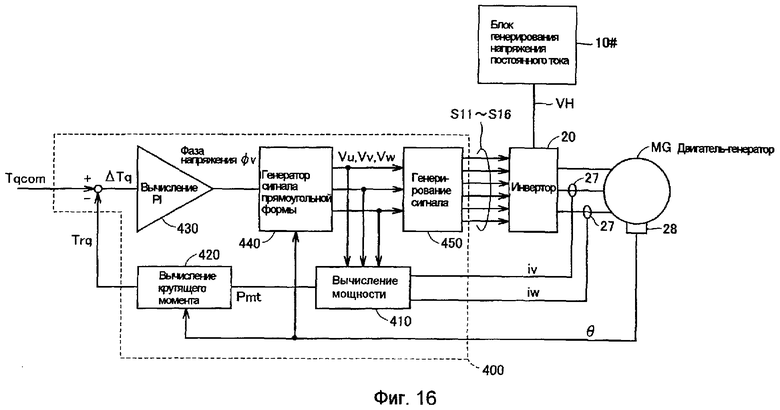
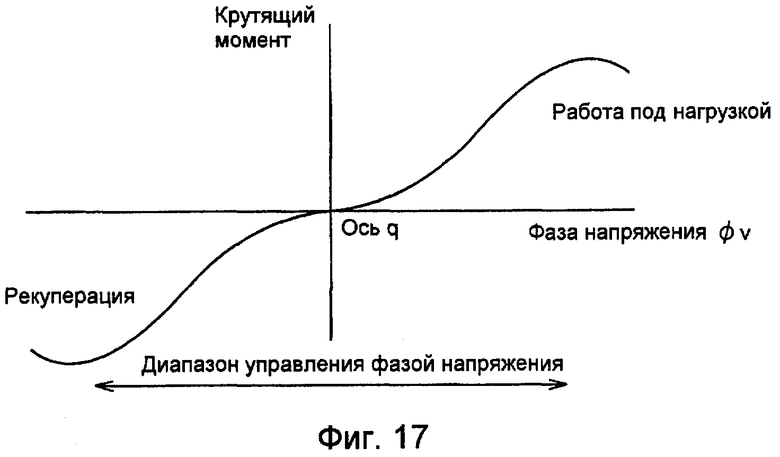
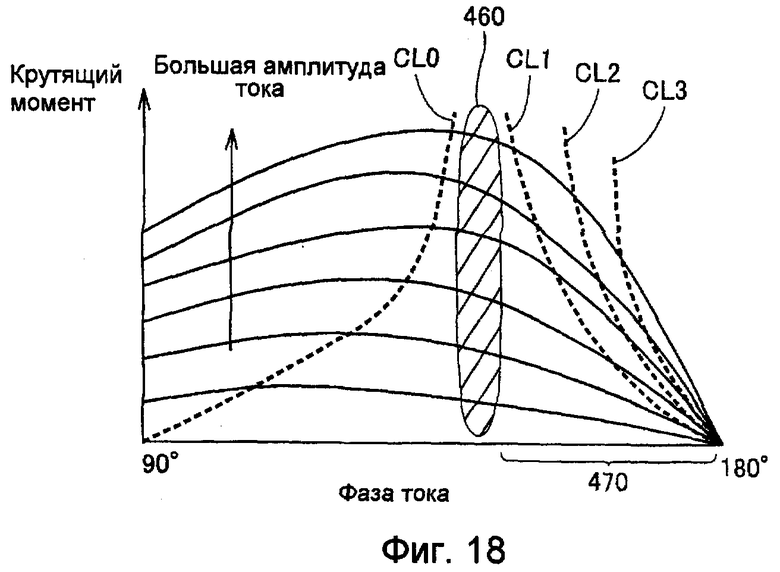
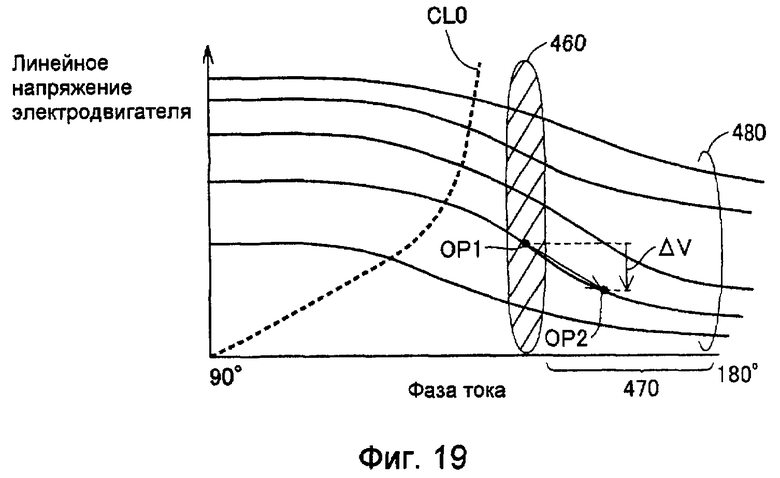
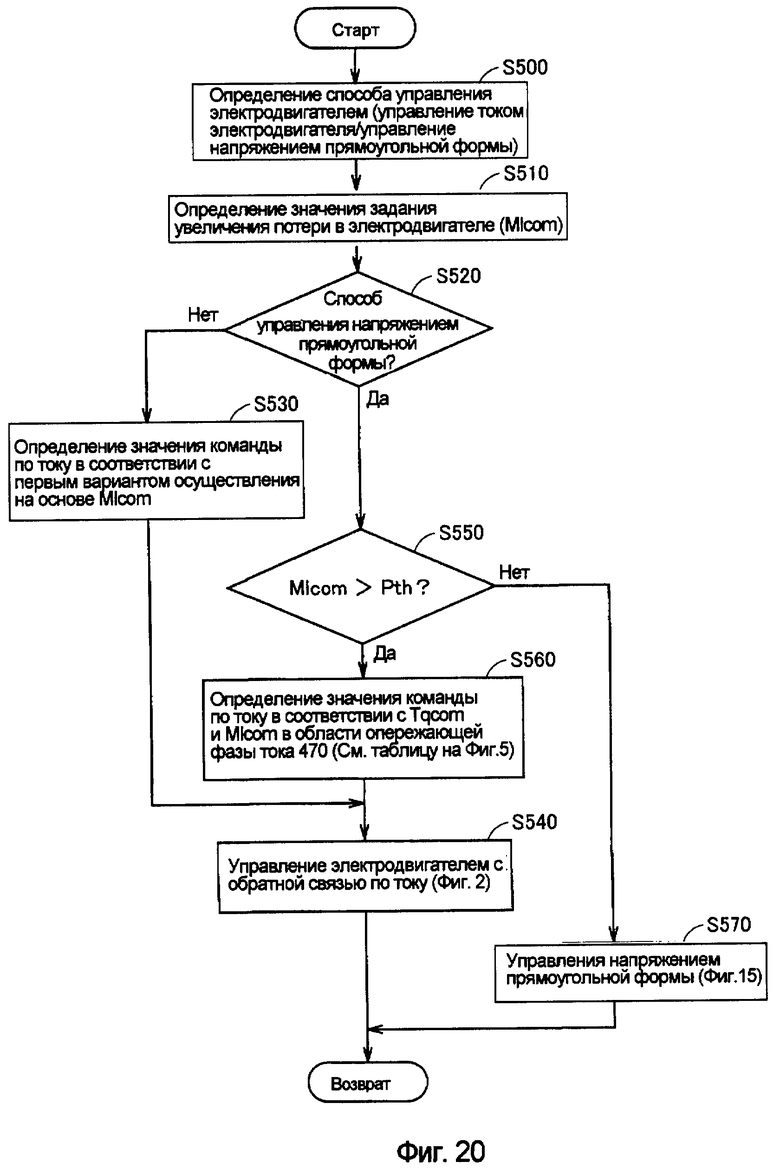
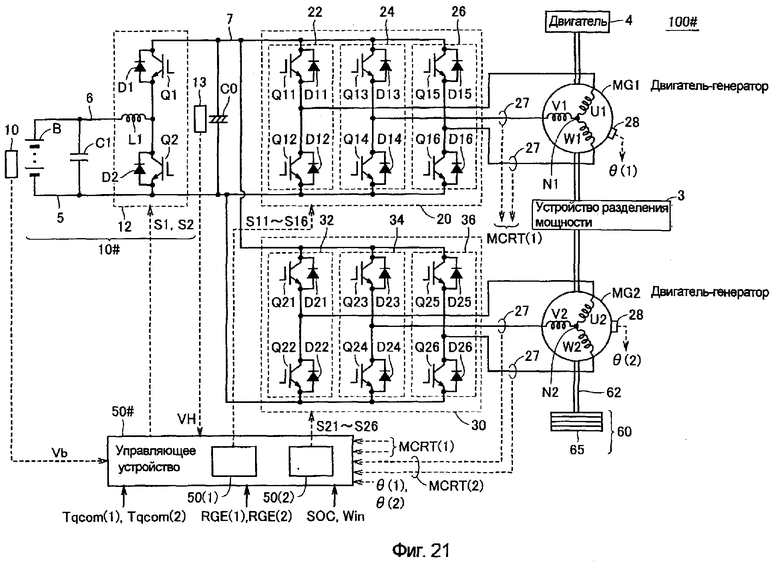
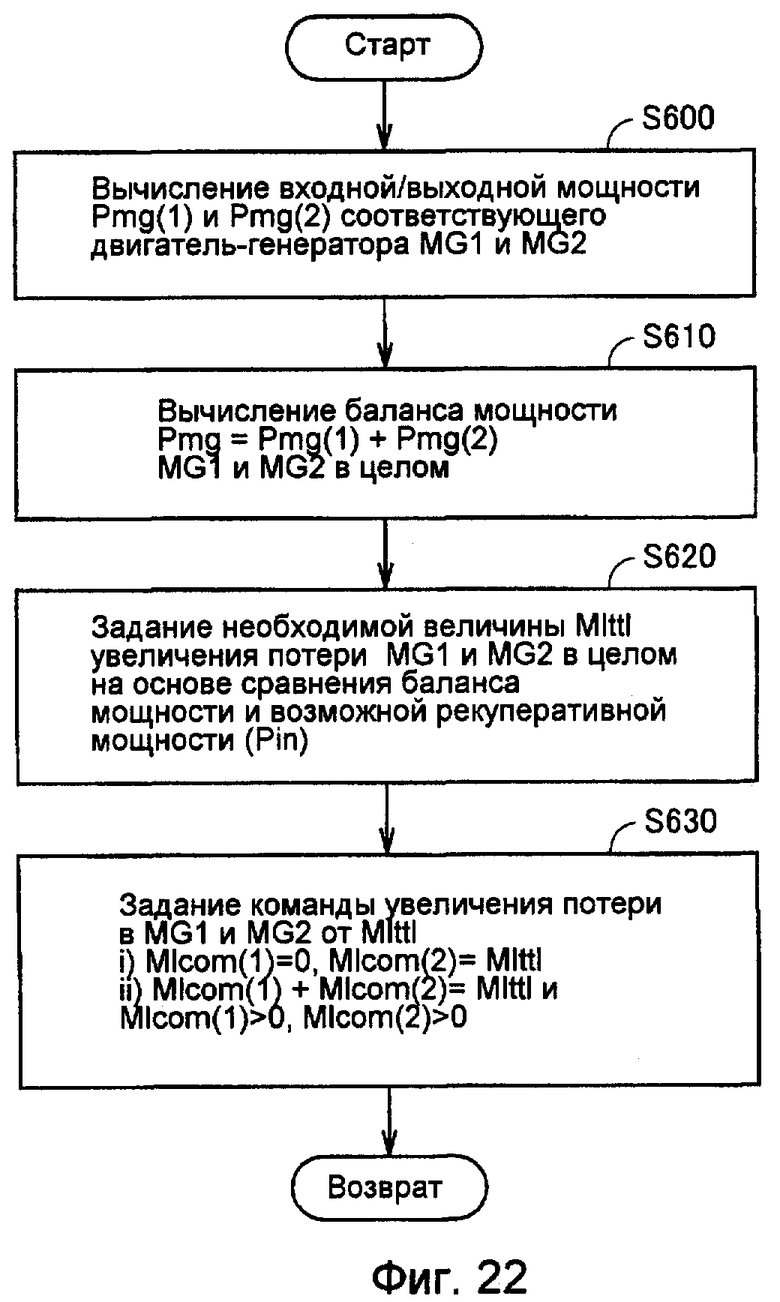
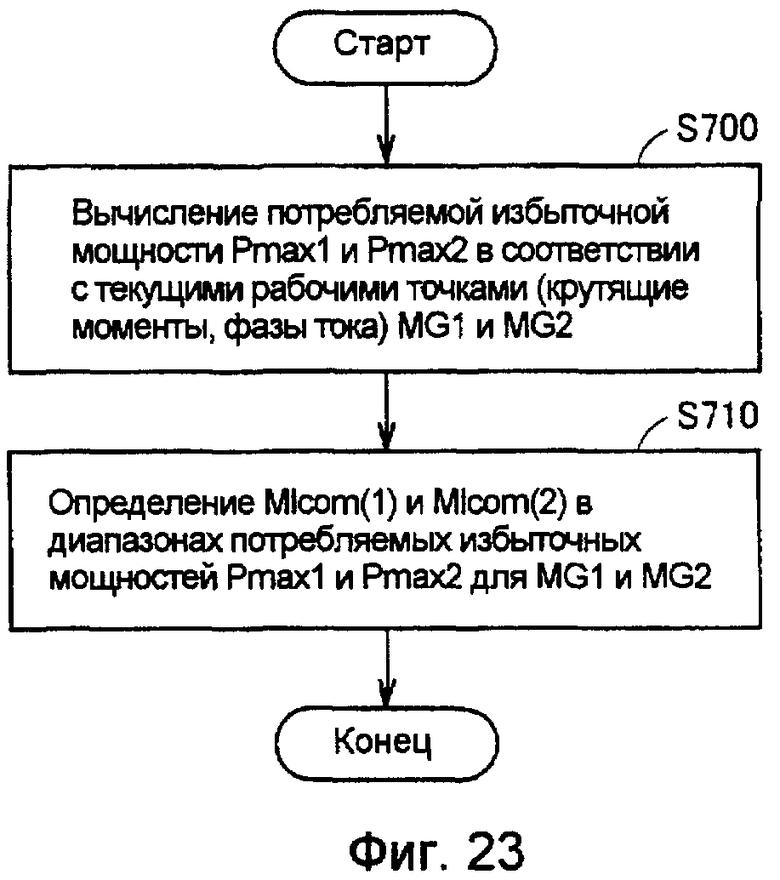
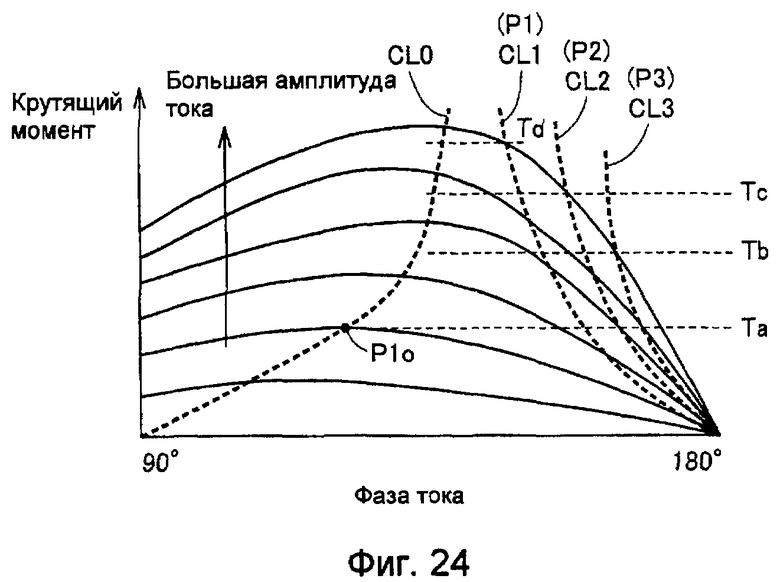
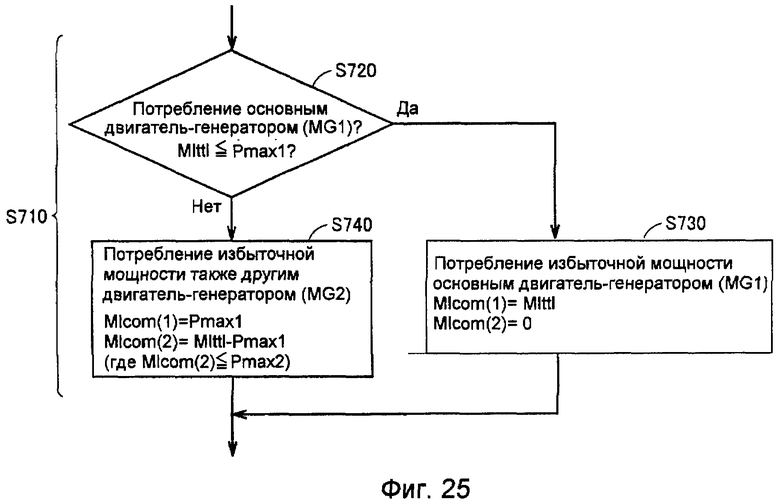
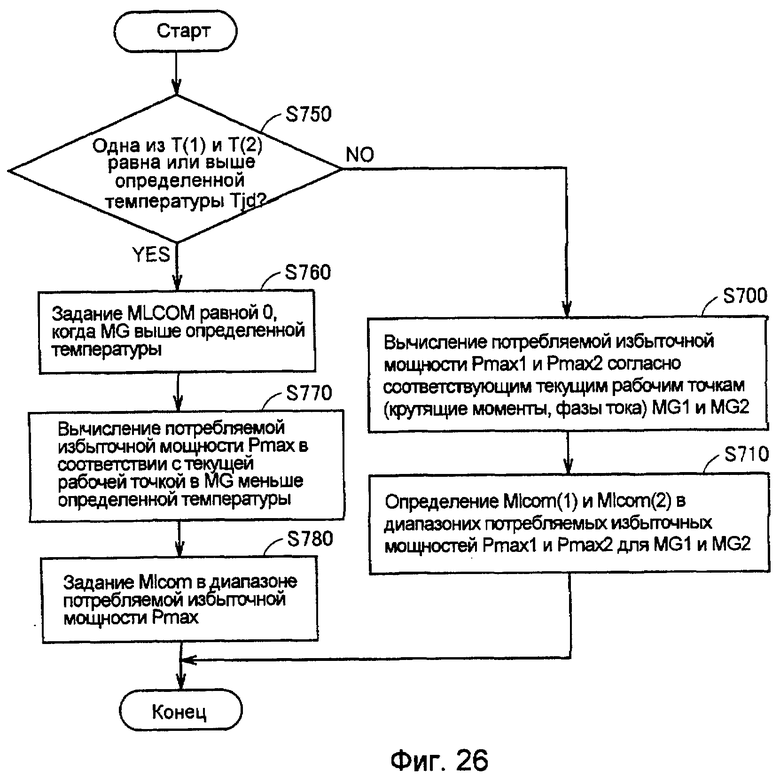
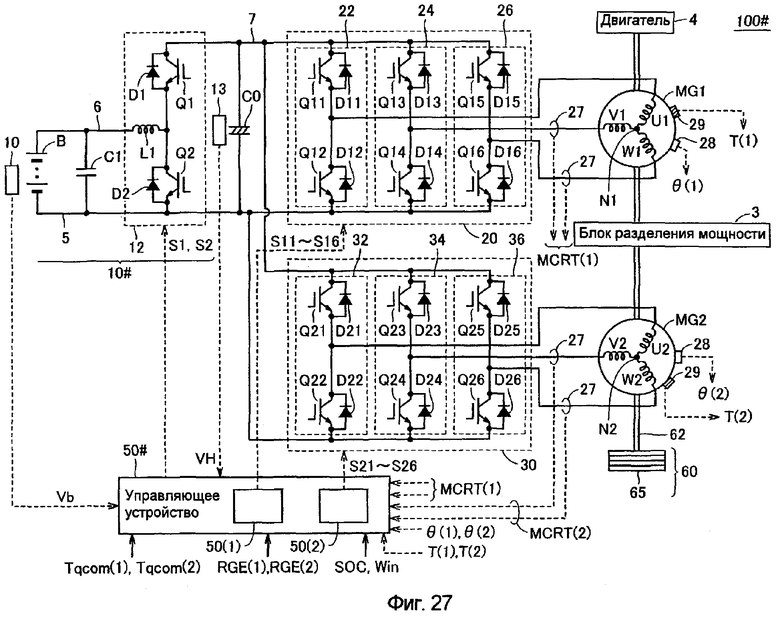
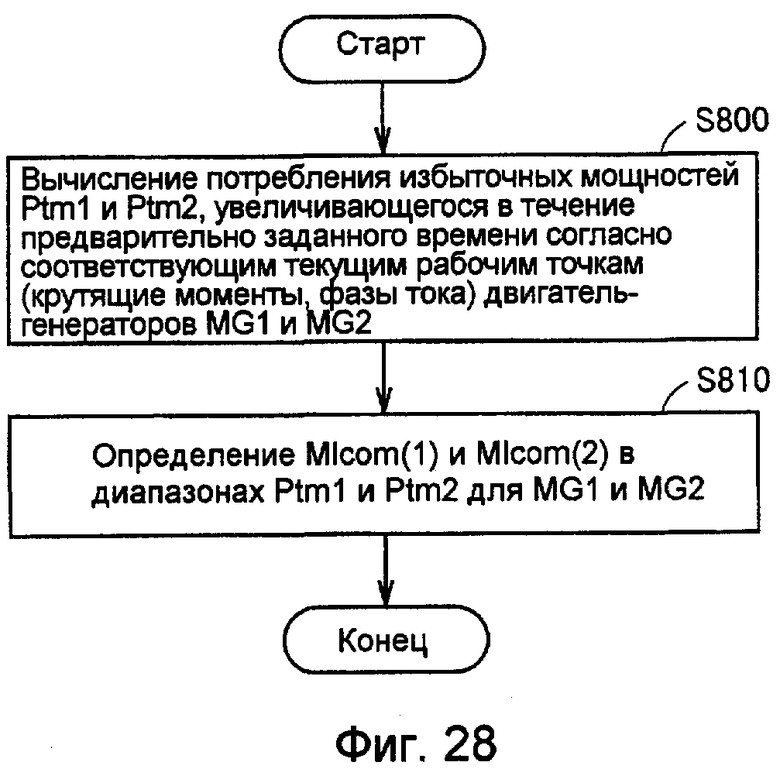
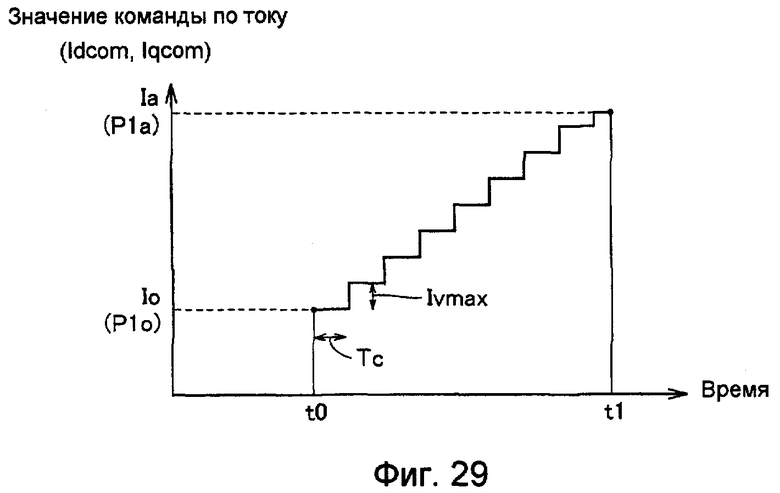
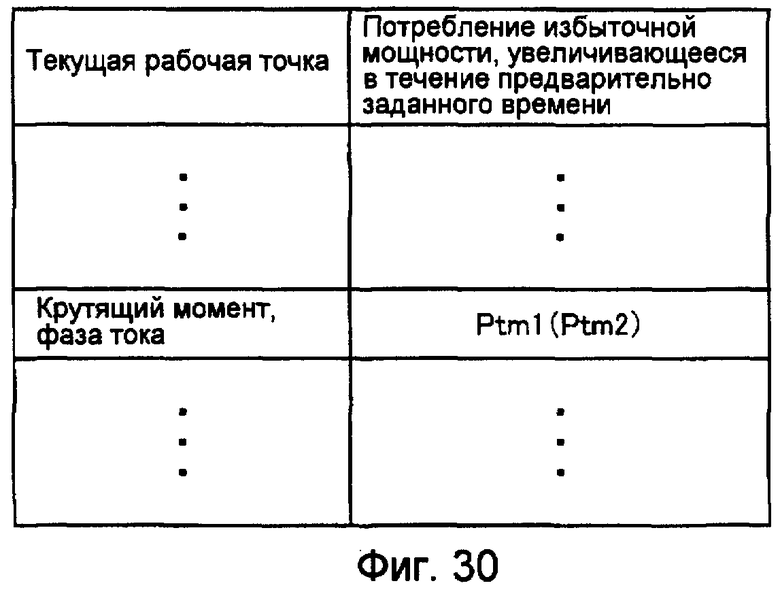
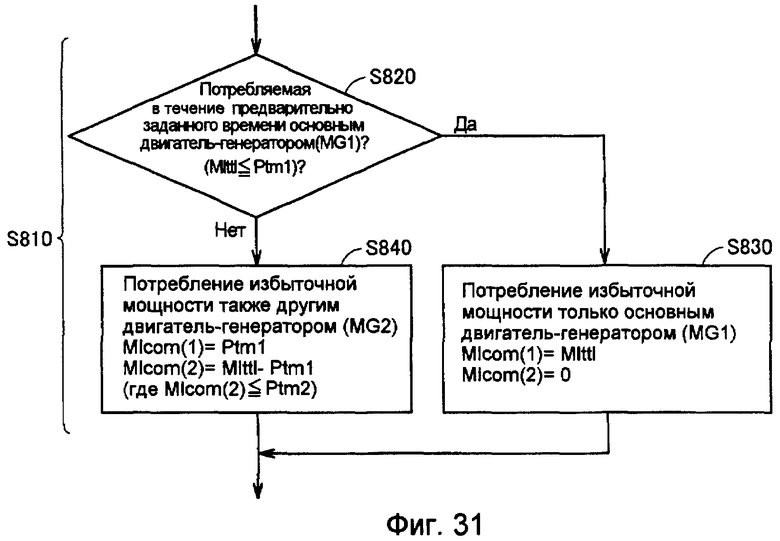
Изобретение относится к области электротехники и может быть использовано для управления электродвигателями переменного тока. Техническим результатом является возможность потребления избыточной мощности при выполнении следящего управления крутящим моментом без создания нестабильности в управлении электродвигателем. В системе привода электродвигателя переменного тока, величина тока которого контролируется по методу обратной связи, команда по току производится в процессе нормальной работы в соответствии со значением команды крутящего момента на характеристической линии оптимального КПД (CL0), чтобы выбрать оптимальную фазу тока, максимизирующую выходной крутящий момент при постоянной амплитуде тока электродвигателя. Напротив, если электродвигатель переменного тока производит чрезмерное количество генерируемой мощности, превосходящее величину, способную к рекуперации мощности в электродвигателе переменного тока, выполняется режим потребления для специального увеличения потери мощности в электродвигателе переменного тока. В процессе режима потребления создается команда по току в соответствии со значением команды крутящего момента на характеристической линии увеличения потери (CL1-CL3) с целью изменения фазы тока относительно вышеуказанного оптимального значения. Таким образом, потеря мощности в электродвигателе переменного тока может быть увеличена для потребления избыточной мощности без потери стабильности управления электродвигателем. 12 з.п. ф-лы, 31 ил.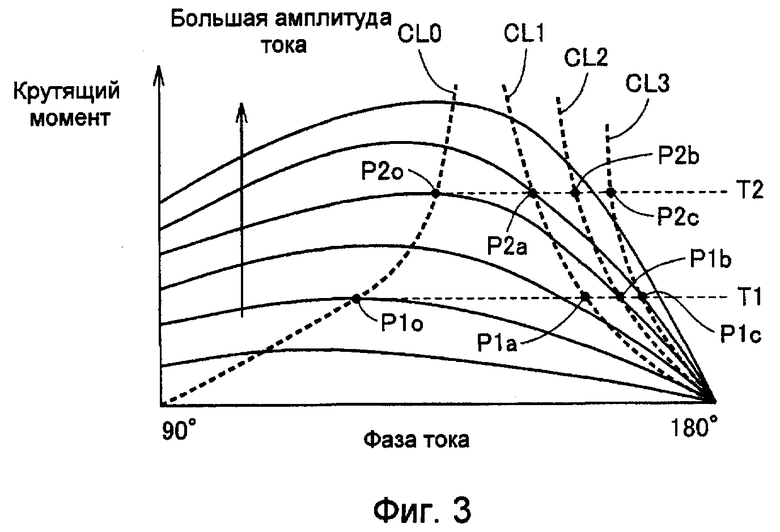
1. Система электропривода для приведения в действие электродвигателя переменного тока, содержащая: контур электропривода, выполненный с возможностью двунаправленно подавать и получать мощность к и от электродвигателя переменного тока и подавать мощность привода к упомянутому электродвигателю переменного тока, и: средство управления электродвигателем для управления работой упомянутого контура электропривода для выполнения режима потребления избыточной мощности, определяемой в зависимости от состояния упомянутой системы электропривода, упомянутым электродвигателем переменного тока, и для выполнения следящего режима, при котором выходной крутящий момент следует за изменениями в значении команды крутящему моменту, при этом упомянутый режим потребления сохраняется, когда упомянутое значение команды крутящему моменту к упомянутому элетродвигателю переменного тока изменяется во время упомянутого режима потребления, при этом упомянутое средство управления электродвигателем включает в себя: средство создания команды по току для создания, в качестве команды по току, набора из значения команды по току по оси «d» и значения команды по току по оси «q», соответствующих амплитуде и фазе тока двигателя, что приводит выходной крутящий момент упомянутого электродвигателя переменного тока в соответствие с упомянутым значением команды крутящему моменту и приводит к потреблению упомянутой избыточной мощности упомянутым электродвигателем переменного тока, и средство управления по току для управления работой упомянутого контура электропривода для генерирования тока электродвигателя в соответствии с упомянутой командой по току, произведенной упомянутым средством создания команды по току.
2. Система электропривода по п.1, в которой упомянутое средство создания команды по току электродвигателя создает набор из упомянутого значения команды по току по оси «d» и упомянутого значения команды по току по оси «q» для привода упомянутого электродвигателя переменного тока с фазой тока относительно понижающей КПД привода упомянутого электродвигателя переменного тока в соответствии с увеличением определенной избыточной мощности в упомянутом режиме потребления.
3. Система электропривода по п.1, в которой упомянутое средство управления электродвигателем имеет средство оценки мощности для оценки мощности, вырабатываемой упомянутым электродвигателем переменного тока на основании угловой скорости вращения упомянутого электродвигателя переменного тока и упомянутого значения команды крутящему моменту, и определяет упомянутую избыточную мощность, потребляемую в процессе упомянутого режима потребления, в соответствии с вырабатываемой мощностью, оцениваемой упомянутым средством оценки мощности.
4. Система электропривода по п.1, в которой упомянутый контур электропривода выполнен с возможностью двунаправленно подавать и получать мощность к и от перезаряжаемого источника питания постоянного тока, упомянутая система электропривода дополнительно содержит детектор напряжения, детектирующий напряжение на межсоединении, электрически соединяющем упомянутый контур электропривода и упомянутый источник питания постоянного тока, и упомянутое средство управления электродвигателем определяет упомянутую избыточную мощность, потребляемую в процессе упомянутого режима потребления в соответствии с напряжением, детектируемым упомянутым средством детектирования напряжения.
5. Система электропривода по п.1, в которой упомянутый электродвигатель переменного тока устанавливается на транспортном средстве, и выходной вал упомянутого электродвигателя переменного тока соединен с колесом упомянутого транспортного средства для передачи крутящего момента, и упомянутое средство управления электродвигателем определяет упомянутую избыточную мощность, потребляемую в процессе упомянутого режима потребления в соответствии с силой торможения, требующейся в упомянутом транспортном средстве.
6. Система электропривода по п.1, в которой упомянутое средство управления электродвигателем дополнительно включает в себя средство запоминания характеристик для предварительного запоминания корреляции между упомянутым значением команды крутящему моменту и командой по току, соответствующей упомянутому потреблению избыточной мощности такой же величины в упомянутом электродвигателе переменного тока, и упомянутое средство создания команды по току создает набор из упомянутого значения команды по току по оси «d» и значения команды по току по оси «q» в соответствии с упомянутым значением команды крутящему моменту и упомянутой определенной избыточной мощностью на основании упомянутой корреляции, сохраненной в упомянутом средстве запоминания характеристик.
7. Система электропривода по п.1, в которой упомянутое средство управления электродвигателем дополнительно включает в себя средство задания увеличения потери для задания команды потери в электродвигателе, означающей потерю мощности, которая должна быть увеличена, в упомянутом двигателе переменного тока в соответствии с определенной избыточной мощностью, и упомянутое средство создания команды по току создает набор из значения команды по току по оси «d» и значения команды по току по оси «q» таким образом, что КПД привода упомянутого электродвигателя переменного тока относительно снижается в соответствии с увеличением упомянутой потери мощности, вызванной упомянутой командой потери в электродвигателе, в соответствии с упомянутым значением команды крутящему моменту и упомянутой командой потери в электродвигателе, заданной упомянутым средством задания увеличения потери.
8. Система электропривода по п.7, в которой упомянутое средство управления электродвигателем дополнительно включает в себя: средство управления напряжением прямоугольной формы для управления работой упомянутого контура электропривода для приложения напряжения прямоугольной формы, имеющего фазу, зависящую от упомянутого значения команды крутящему моменту, к упомянутому электродвигателю переменного тока, средство выбора режима управления для выбора одного из управления электродвигателем упомянутым средством управления по току и управления электродвигателем упомянутым средством управления напряжением прямоугольной формы в соответствии с рабочим состоянием упомянутого электродвигателя переменного тока, и средство коррекции режима управления для отмены выбора, сделанного упомянутым средством выбора режима управления, и выбора управления электродвигателем упомянутым средством управления по току в соответствии с упомянутой командой потери в электродвигателе, определенной упомянутым средством задания увеличения потери, когда упомянутое средство выбора режима управления выбирает управление электродвигателем средством управления напряжением прямоугольной формы, и когда упомянутое средство коррекции режима управления выбирает управление электродвигателем упомянутым средством управления по току, упомянутое средство создания команды по току создает набор из упомянутого значения команды по току по оси «d» и упомянутого значения команды по току по оси «q» в области КПД привода упомянутого электродвигателя переменного тока меньшей, чем достигнутая электроприводом с использованием упомянутого средства управления напряжением прямоугольной формы.
9. Система электропривода по п.1, в которой упомянутая система электропривода приводит в действие множество упомянутых электродвигателей переменного тока, упомянутый контур электропривода и упомянутое средство управления электродвигателем расположены соответственно в каждом из упомянутых электродвигателей переменного тока, и каждый из упомянутых контуров электропривода выполнен с возможностью двунаправленно подавать и получать мощность к и от общего перезаряжаемого источника питания постоянного тока, упомянутая система электропривода дополнительно содержит средство распределения для задания потребляемых избыточных мощностей в упомянутом множестве электродвигателей переменного тока, соответственно так, что все упомянутые электродвигатели переменного тока в целом потребляют упомянутую избыточную мощность, и каждое из упомянутых средств управления электродвигателем управляет соответствующим одним из упомянутых электродвигателей переменного тока для выполнения режима потребления, соответственно, одной из упомянутых потребляемых избыточных мощностей, определенной упомянутым средством распределения.
10. Система электропривода по п.9, в которой упомянутое средство распределения включает в себя: средство задания верхнего предела для вычисления потребляемых избыточных мощностей упомянутым множеством электродвигателей переменного тока, соответственно, на основе текущего рабочего состояния в соответствующем электродвигателе переменного тока, и средство определения распределения для задания потребляемых избыточных мощностей в соответствующем упомянутом множестве электродвигателей переменного тока так, что каждая из упомянутых потребляемых избыточных мощностей находится в диапазоне соответствующей потребляемой избыточной мощности, вычисленной упомянутым средством задания верхнего предела.
11. Система электропривода по п.9, в которой упомянутое средство распределения включает в себя средство определения распределения для задания потребляемых избыточных мощностей в упомянутом множестве электродвигателей переменного тока, соответственно, с учетом температур упомянутого множества электродвигателей переменного тока.
12. Система электропривода по п.9, в которой упомянутое средство распределения включает в себя средство задания верхнего предела для вычисления, для соответствующих упомянутых электродвигателей переменного тока, избыточных мощностей, каждая из которых потребляется в течение предварительно заданного времени на основе текущего рабочего состояния соответствующего электродвигателя переменного тока, и средство определения распределения для задания потребляемых избыточных мощностей в соответствующих упомянутых электродвигателях переменного тока, так что каждая из упомянутых потребляемых избыточных мощностей находится в диапазоне соответствующей избыточной мощности, потребляемой в течение предварительно заданного времени, вычисленной упомянутым средством задания верхнего предела.
13. Система электропривода по любому из пп.9-12, в которой упомянутое множество электродвигателей переменного тока включает в себя: приводной электродвигатель, создающий приводную силу колеса транспортного средства, и неприводной электродвигатель, не создающий непосредственно упомянутую мощность привода колеса, и при этом упомянутое средство распределения задает потребляемые избыточные мощности в упомянутых соответствующих электродвигателях переменного тока так, что упомянутый неприводной электродвигатель потребляет избыточную мощность в приоритетном порядке.
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД С ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2262794C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2231200C2 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| JP 5137377 A, 01.06.1993 | |||
| JP 2001095300 A, 06.04.2001 | |||
| Прибор для непрерывного измерения толщины масляной пленки в подшипнике скольжения | 1950 |
|
SU91589A1 |

