Предложенные технические решения предназначены для использования в радиотехнике в области оптимального приема псевдошумовых сигналов с помощью согласованных фильтров в командных радиолиниях с решающей, информационной и отложенной обратной связью.
В настоящее время известны способы обработки аналоговых псевдошумовых сигналов со сжатием по длительности, а также технические решения, описывающие различные типы построения линейных и дискретных согласованных фильтров.
Способы обработки псевдошумовых аналоговых сигналов при помощи дискретных согласованных фильтров широко известны и описаны в технической литературе, (см., например, Варакин Л.Е. Системы связи с шумоподобными сигналами, Москва, Радио и связь, 1985, стр.364-365, рис.22.3).
При работе известных дискретных согласованных фильтров последовательно выполняются стандартные для подобных процессов операции. Непрерывное радиочастотное колебание с выхода линейной части приемника переводится в область видеочастот. Выделяется огибающая радиочастотного сигнала. С помощью двустороннего ограничителя и каскада совпадения «1» выполняется дискретизация сигнала по времени и амплитуде на два уровня «1» и «0» с опросом тактовыми импульсами. Код сигнала записывается в n-разрядный регистр сдвига, построенный на D-триггерах, на С-входы которого поступают тактовые импульсы, при этом число разрядов регистра сдвига равно базе сигнала. С выходов регистра на n-входное суммирующее устройство подаются сигналы, соответствующие выходному коду, принятому без искажения. В результате сигнал на выходе n-входного суммирующего устройства является результатом обработки псевдошумового сигнала.
Известный из книги «Системы связи с шумоподобными сигналами» способ обработки аналоговых сигналов, а также дискретный согласованный фильтр, реализующий данный способ, выбраны в качестве ближайшего аналога для предложенных технических решений.
В книге «Системы связи с шумоподобными сигналами» на примере использования в качестве псевдошумового сигнала 11-разрядного сигнала Баркера показаны результаты выделения автокорреляционной функции как дискретным, так и линейным согласованным фильтром. Так как обработка псевдошумового сигнала с помощью существующего способа построения дискретного согласованного фильтра не является оптимальной, в фильтре реализуется не вся информация, заложенная во входном сигнале. Таким образом, основным недостатком известных дискретных согласованных фильтров, а также обработки аналоговых сигналов при помощи этих фильтров, является невозможность в полной мере реализовать автокорреляционную функцию входного псевдошумового сигнала, что приводит к их проигрышу по сравнению с линейными согласованными фильтрами.
Предложенные технические решения основаны на более полном использовании информации об обрабатываемом сигнале и направлены на устранение указанных недостатков.
Предложенные технические решения позволят реализовать автокорреляционную функцию входного псевдошумового сигнала, отличающуюся от теоретической только формой сигнала, а следовательно увеличить помехоустойчивость выходного сигнала более чем на 2 дБ.
Предложенный технический результат достигается тем, что предложен способ обработки сигналов в дискретном согласованном фильтре и варианты реализации дискретного согласованного фильтра для реализации предложенного способа.
Предложен способ обработки сигналов в дискретном согласованном фильтре, включающий преобразование радиочастотного колебания в область видеочастот, выделение огибающей сигнала и его дискретизацию по времени и амплитуде на два уровня «1» и «0», запись n-разрядного кода сигнала в n-разрядный регистр сдвига, где n - целое число больше единицы. Соответствующие образцу сигналы с n выходов регистра сдвига суммируются, образуя автокорреляционную функцию обрабатываемого дискретного сигнала с присутствием постоянной составляющей. Для выделения и обработки автокорреляционной функции входного сигнала используется канал прямого кода и канал инверсного кода. Как в канале прямого кода, так и в канале инверсного кода производят выделение огибающей сигнала, дискретизацию сигнала по времени и амплитуде на два уровня «1» и «0» с подачей кодов сигналов в соответствующие n-разрядные регистры сдвига. Выходные сигналы 2n разрядов, соответствующих в каждом из двух регистров своему образцу, суммируются и после снятия постоянной составляющей образуют автокорреляционную функцию входного дискретизированного сигнала.
Предложены варианты реализации дискретного согласованного фильтра, включающего последовательно соединенные перемножитель, фильтр нижних частот, решающее устройство, n-разрядный регистр сдвига и суммирующее устройство. Решающее устройство состоит из последовательно соединенных двустороннего ограничителя и каскада совпадения с «1». Каскад совпадения с «1» решающего устройства и С-выходы n-разрядного регистра сдвига подключены к источнику опросных тактовых импульсов. Решающее устройство дискретного согласованного фильтра дополнительно включает инвертор, соединенный с выходом двустороннего ограничителя, и каскад совпадения с «0», соединенный с выходом инвертора. Каскад совпадения с «0», так же как и каскад совпадения с «1», подключен к источнику опросных тактовых импульсов, n-разрядный регистр сдвига включает регистр прямого кода и регистр инверсного кода. Выход каскада совпадения с «1» соединен с входом регистра прямого кода. Выход каскада совпадения с «0» соединен с входом регистра инверсного кода.
В одном из вариантов реализации дискретного согласованного фильтра выходы регистров прямого и инверсного кода соединены с 2n входами суммирующего устройства. Выход суммирующего устройства соединен с входом устройства снятия (вычитания) постоянной составляющей выходного сигнала, образуя автокорреляционную функцию псевдошумового сигнала.
В другом варианте реализации дискретного согласованного фильтра суммирующее устройство включает первое и второе n-входные суммирующие устройства. Выходы регистра прямого кода соединены с n входами первого суммирующего устройства. Выходы регистра инверсного кода соединены с n входами второго суммирующего устройства. Выходы первого и второго суммирующих устройств соединены с входами двухвходового суммирующего устройства, выход которого соединен с входом устройства снятия постоянной составляющей выходного сигнала, образуя автокорреляционную функцию псевдошумового сигнала.
Предложенное изобретение поясняется чертежами
Фиг.1 - структурная схема дискретного согласованного фильтра.
Фиг.2 - результаты обработки 11-разрядного сигнала Баркера с помощью дискретного согласованного фильтра.
Фиг.3 - значения ненормированной автокорреляционной функции прямого кода дискретизированного сигнала.
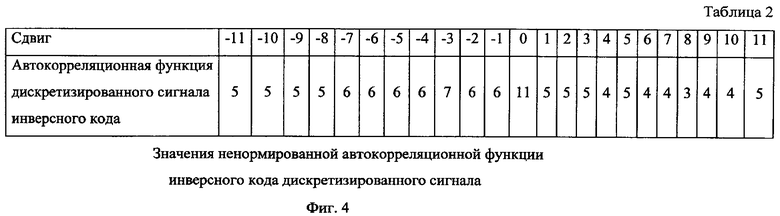
Фиг.4 - значения ненормированной автокорреляционной функции инверсного кода дискретизированного сигнала.
Дискретный согласованный фильтр включает соединенные последовательно перемножитель 1, фильтр нижних частот 2, решающее устройство, n-разрядный регистр сдвига и суммирующее устройство 13. Решающее устройство включает двусторонний ограничитель 3, каскад совпадения с «1» 4, инвертор 7 и каскад совпадения с «0» 8. Вход двустороннего ограничителя 3 соединен с выходом фильтра нижних частот 2, выход двустороннего ограничителя непосредственно соединен с входом каскада совпадения с «1» 4 и через инвертор 7 с каскадом совпадения с «0» 8. n-разрядный регистр сдвига построен на D-триггерах и включает регистр прямого кода 5, вход которого соединен с выходом каскада совпадения с «1» 4, и регистр инверсного кода 9, вход которого соединен с выходом каскада совпадения с «0» 8. Каскад совпадения с «1» 4 решающего устройства, n-разрядный регистр сдвига прямого кода 5 и n-разрядный регистр сдвига инверсного кода 9 подключены к источнику опросных тактовых импульсов. Выходы n-разрядного регистра сдвига прямого кода 5 и n-разрядного регистра сдвига инверсного кода 9 соединены с входами суммирующего устройства 13, выход которого соединен с входом устройства снятия постоянной составляющей 12.
На фиг.1 приведен вариант выполнения суммирующего устройства дискретного согласованного фильтра, включающего первое n-входное суммирующее устройство 6, второе n-входное суммирующее устройство 10 и двухвходовое суммирующее устройство 11. Вход первого суммирующего устройства 6 соединен с n выходами n-разрядного регистра сдвига прямого кода 5. Вход второго суммирующего устройства 10 соединен с n выходами n-разрядного регистра сдвига инверсного кода 9. Выходы первого 6 и второго 10 суммирующих устройств соединены с входом с двухвходового суммирующего устройства 11, выход которого соединен с входом устройства снятия постоянной составляющей выходного сигнала 12, реализующего автокорреляционную функцию псевдошумового сигнала.
При работе дискретных согласованных фильтров предложенных конструкций осуществляется обработка аналоговых сигналов в соответствии с предложенным способом. При помощи двустороннего ограничителя 3 каскада совпадения с «1» 4, инвертора 7 и каскада совпадения с «0» 8 производится дискретизация и формирование прямого и инверсного кодов. При этом на выходы двустороннего ограничителя 3, каскада совпадения с «1» 4, инвертора 7 и каскада совпадения с «0» 8 подаются опросные тактовые импульсы. На входы n-разрядного регистра сдвига прямого кода 5 и n-разрядного регистра сдвига инверсного кода 9 раздельно подаются прямой и инверсный код дискретного сигнала, при этом регистры прямого и инверсного кода тактируются опросными импульсами. Сигналы на выходах регистра прямого кода 5 и на выходах регистра инверсного кода 9 суммируются в суммирующем устройстве 13, код сигнала на выходе которого после снятия постоянной составляющей, является результатом выделения автокорреляционной функции псевдошумового сигнала.
При тестировании фильтров исходным 11-разрядным сигналом Баркера уровни основных и боковых составляющих автокорреляционной функции сигнала на выходе дискретных согласованных фильтров, предложенной конструкции, совпадают с уровнями автокорреляционной функции сигнала на выходе линейного согласованного фильтра (см. фиг.2, 3 и 4). Аналогичные результаты приближения помехоустойчивости сигнала, прошедшего через устройство, реализующее предлагаемый способ построения дискретного согласованного фильтра, к теоретической автокорреляционной функции получается и для других широкополосных сигналов (сигналов, построенных на основе М-последовательностей, кодов Голда и т.д.).
Таким образом, предложенные технические решения позволят реализовать автокорреляционную функцию входного псевдошумового сигнала, отличающуюся от теоретической только формой сигнала, а следовательно увеличить помехоустойчивость выходного сигнала более чем на 2 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ МНОЖЕСТВА ПСЕВДОШУМОВЫХ СИГНАЛОВ | 2009 |
|
RU2403675C1 |
| СПОСОБ ОБРАБОТКИ СЛОЖНЫХ КВАЗИОПТИМАЛЬНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2377644C1 |
| СПОСОБ ФОРМИРОВАНИЯ СЛОЖНЫХ КВАЗИОПТИМАЛЬНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2379826C2 |
| СПОСОБ СИНХРОННОЙ ОБРАБОТКИ СЛОЖНОГО КВАЗИОПТИМАЛЬНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434274C1 |
| СПОСОБ ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ПРИ ИСПОЛЬЗОВАНИИ СЛОЖНЫХ ПСЕВДОШУМОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2387085C1 |
| СПОСОБ ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ПРИ ИСПОЛЬЗОВАНИИ СЛОЖНЫХ ПСЕВДОШУМОВЫХ СИГНАЛОВ С ДИСКРЕТНО ИЗМЕНЯЕМОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2387084C1 |
| СПОСОБ ВХОЖДЕНИЯ В СИНХРОНИЗМ ПСЕВДОШУМОВЫХ СИГНАЛОВ ПО ЗАДЕРЖКЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2410841C1 |
| СПОСОБ ПРОВЕДЕНИЯ СИНХРОНИЗАЦИИ БОРТОВОЙ ШКАЛЫ ВРЕМЕНИ | 2009 |
|
RU2408044C1 |
| ГЕНЕРАТОР СЛУЧАЙНОГО ПРОЦЕССА | 1991 |
|
RU2050585C1 |
| Устройство для передачи информации многопозиционными сигналами | 1984 |
|
SU1358102A1 |


Изобретение относится к радиотехнике, а именно к области оптимального приема псевдошумовых сигналов. Достигаемый технический результат - повышение помехоустойчивости выходного сигнала. Согласно способу преобразуют радиочастотное колебание в область видеочастот, выделяют сигнал огибающей, дискретизируют его по времени и амплитуде на два уровня «1» и «0», полученный код записывают в n-разрядный регистр сдвига дискретного согласованного фильтра, согласованного с прямым кодом, и дискретного согласованного фильтра, согласованного с инверсным кодом. Автокорреляционную функцию принятого сигнала формируют путем снятия постоянной составляющей с результата суммирования выходных сигналов указанных дискретных согласованных фильтров. Устройство, реализующее способ, содержит перемножитель (1), фильтр нижних частот (2), двусторонний ограничитель (3), каскад совпадения с «1» (4), каскад совпадения с «0» (8), инвертор (7), n-разрядные регистры сдвига (5, 9), n-входные суммирующие устройства (6, 10), двухвходовое суммирующее устройство (11), устройство снятия постоянной составляющей (12), источник опросных тактовых импульсов (Т). При этом на первом n-разрядном регистре сдвига и первом n-входном суммирующем устройстве реализован дискретный фильтр, согласованный с прямым кодом сигнала, а на втором n-разрядном регистре сдвига и втором n-входном суммирующем устройстве реализован дискретный фильтр, согласованный с инверсным кодом сигнала. 2 н.п. ф-лы, 4 ил.
| ВАРАКИН Л.Е | |||
| Системы связи с шумоподобными сигналами | |||
| - М.: Радио и связь, 1985, с.364-365, рис.22.3 | |||
| УСТРОЙСТВО СЖАТИЯ ФАЗОМАНИПУЛИРОВАННЫХСИГНАЛОВ | 0 |
|
SU246595A1 |
| Цифровой автокоррелятор | 1985 |
|
SU1280387A1 |
| Цифровой автокоррелятор | 1983 |
|
SU1149277A1 |
| US 5930157 A, 27.07.1999 | |||
| DE 3211104 А1, 06.10.1983 | |||
| Устройство для замены штампов на прессах | 1986 |
|
SU1318341A1 |

