Предложенные технические решения предназначены для использования в радиотехнике, в области передачи информации в космических командных радиолиниях, использующих псевдошумовые сигналы.
В настоящее время известно множество способов и устройств ускоренного вхождения в синхронизм псевдошумовых сигналов по задержке, в зависимости от способа управления опорным сигналом и от способа принятия решения о совпадении фаз принимаемого и опорного сигналов, которые широко представлены в технической литературе (см., например, монографии
[1] - Алексеев А.И., Шереметьев А.Г., Тузов Г.И., Глазов В.
«Теория и применения псевдослучайных сигналов…» М., «Наука», 1969, 367 с.
[2] - «Шумоподобные сигналы в системах передачи информации». Под редакцией В.Б Пестрякова, М., «Сов. радио», 1973, 424 с.
[3] - Тузов Г.И. «Статистическая теория приема сложных сигналов.» М., «Сов. радио», 1977, 400 с.
[4] - Стифлер Дж.Дж. «Теория синхронной связи» «Связь», 1975, 488 с. и другие).
Наименьшее время поиска псевдошумовых сигналов (ПШС) занимают способы, основанные на согласованной обработке принимаемого сигнала, в результате которой определяется его фаза. Практическая реализация таких процедур поиска разнообразна. Наиболее известными являются N-канальный приемник и согласованные фильтры [1, 2]. В работе [2] исследуются одноэтапная и двухэтапная процедуры проверки совпадения опорного и принимаемого сигналов, в которой оценка фазы принимается с помощью фильтра, согласованного с сегментом ПШС. Наибольшие трудности при анализе процедур поиска и принятия решения о переходе в режим слежения за сигналом связаны с учетом боковых выбросов функции взаимной корреляции псевдошумовой последовательности с ее сегментом. Известны другие способы реализации согласованного обнаружения ПШС с использованием цифровой обработки принимаемого сигнала в ускоренном темпе.
Известно множество патентов на изобретения, посвященных усовершенствованию различных этапов синхронизации псевдошумовых сигналов, например:
«Способ и устройство синхронизации псевдослучайных последовательностей» - Патент на изобретение №2320080 от 2006.01;
«Способ и устройство широкополосной многоканальной адресной дуплексной связи» - заявка на изобретение №2187204 от 2002.08.10;
Патент на изобретение №1840128;
Патент на изобретение №2033640;
Патент на изобретение №2192093 и т.д.
В качестве прототипа предлагаемому способу принимается способ корреляционного приема информации, передаваемой псевдошумовыми сигналами, указанный в п.6.2 [2] и выполняющий следующие операции:
1. Вхождение в синхронизм опорного с входным ПШ сигналом как по несущей и фазе ВЧ, так и по фазе псевдошумового сигнала.
2. Слежение опорного генератора за изменениями входного сигнала.
3. Прием и оптимальная обработка управляющей информации.
Известно, что в космических командных радиолиниях все виды передаваемой блочной информации привязывают к наземной шкале времени, устанавливаемой с точностью до единиц микросекунд к единому времени. Точность установки бортовой шкалы времени соизмерима с n-периодами псевдошумового сигнала, и по этой причине никогда не используют для его синхронизации.
Предлагаемый способ вхождения в синхронизм псевдошумовых сигналов по задержке заключается в том, что j-ю фазу опорного сигнала на приемной стороне привязывают к местной шкале времени, которую синхронизируют от аппаратуры приема сигнала спутниковой навигации системы «ГЛОНАСС» (и/или («GPS»), а с передающей стороны выбранную j-ю фазу псевдошумового сигнала передают с опережением на время распространения по каналу связи и учета взаимной точностной поправки, причем при переходе в режим слежения за принятым сигналом принудительную установку фазы опорного псевдошумового сигнала снимают и возобновляют ее действие при выходе входного сигнала из режима слежения.
Произведем оценку максимального рассогласования времени между моментом прихода j-й фазы ПШ сигнала и формированием j-й фазы опорного сигнала.
Общее рассогласование можно представить в виде:
τ=Δtм.ш.в.+tв.р.+Δtа,
где: Δtм.ш.в=Δtпрл. «гл»+δf·Δtсинхр - рассогласование местных шкал времени Земли и Борта:
Δtпрм. «гл» - точность определения метки времени приемника навигационного сигнала системы «ГЛОНАСС» («GPS»);
δf - относительная стабильность частоты эталона местной шкалы времени;
Δtсинхр - интервал времени между проведением синхронизации эталона частоты местной школы времени от приемника навигационного сигнала «ГЛОНАСС» («GPS»);
 - время рассогласования из-за незнания точного времени распространения сигнала от передающего до приемного устройства:
- время рассогласования из-за незнания точного времени распространения сигнала от передающего до приемного устройства:
Δta = максимальная задержка, вносимая аппаратурой.
Известно, что при Δt«гл»<1 мкс; tв.р.<1 мкс
Δtа прм<1 мкс, тогда при δf·Δtсинхр<7 мкс
τ<10 мкс и
число операций принятия решений сократится от Nмах=2 FT до  , τc - длительность символа ПШ сигнала (где F - полоса псевдошумового сигнала, Т - длительность ПШ сигнала).
, τc - длительность символа ПШ сигнала (где F - полоса псевдошумового сигнала, Т - длительность ПШ сигнала).
Пусть, например, ПШ сигнал представляет собой М-последовательность М(1024,10), F=1,024 мГц, τс - длительность символа ПШ сигнала, τc=1 мкс.
Тогда N1=20, т.е. выигрыш по времени при последовательном способе вхождения в синхронизм (или выигрыш от сокращения числа каналов при параллельном методе «поиска») составляет 100 раз.
Устройство последовательного вхождения в синхронизм псевдошумовых сигналов по задержке, включающее корреляционную схему выделения псевдошумовых сигналов, на первый вход которой подается входной сигнал, на второй вход - код опорного ПШ сигнала, с основного выхода снимаются результаты обработки входной информации, а с второго выхода - сигнал режима слежения.
Отличающееся тем, что в него введены приемник навигационного сигнала системы «ГЛОНАСС» («GPS»), эталон частоты, местная шкала времени, схема И, схема НЕ, блок ключей, ОЗУ, причем выход временной метки точного времени приемника навигационного сигнала системы «ГЛОНАСС» («GPS») соединяют с синхронизирующим входом эталона частоты, выход которого соединяют с входом местной шкалы времени, выход которой соединяют с первым входом схемы И, второй вход которой соединяют с выходом схемы НЕ, вход которой соединяют с вторым выходом корреляционной схемы выделения псевдошумового сигнала, выход схемы И соединяют с управляющим входом блока ключей, k входов которого соединяют с k-параллельными выходами ОЗУ, на вход которого подают установочный код с j-й фазой, k-разрядный выход блока ключей соединяют с вторым входом корреляционной схемы выделения псевдошумовых сигналов.
На фиг.1 представлена структурная схема устройства последовательного вхождения в синхронизм псевдошумовых сигналов по задержке, где:
1 - корреляционная схема выделения псевдошумовых сигналов;
2 - приемник навигационного сигнала системы «ГЛОНАСС» («GPS»);
3 - эталон частоты;
4 - местная шкала времени;
5 - схема И;
6 - схема НЕ;
7 - блок ключей;
8 - ОЗУ.
Рассмотрим работу устройства, приведенного на фиг.1. В исходном состоянии корреляционная схема выделения псевдошумовых сигналов находится в режиме поиска (а не слежения). Выходной сигнал схемы НЕ(6) открывает схему И(5) по второму входу. В момент времени выдачи метки с выхода местной шкалы времени (4) параллельный k-разрядный код ПШ сигнала с j-й фазой подается на второй вход корреляционной схемы выделения псевдошумовых сигналов (1), на первый вход которой непрерывно поступает входной сигнал с фазой, отличной от j на известное время и направление рассогласования сигналов. Число операций согласования, а следовательно, и время, затраченное на согласование фаз входного и опорного сигналов, сокращается в  раз, после чего со второго выхода корреляционной схемы выделения псевдошумовых сигналов (1) подается сигнал «слежение», который, пройдя схему НЕ(6), закрывает схему И(5), прекратив подачу принудительных сигналов с выхода (7) на второй вход корреляционной схемы выделения псевдошумовых сигналов (1).
раз, после чего со второго выхода корреляционной схемы выделения псевдошумовых сигналов (1) подается сигнал «слежение», который, пройдя схему НЕ(6), закрывает схему И(5), прекратив подачу принудительных сигналов с выхода (7) на второй вход корреляционной схемы выделения псевдошумовых сигналов (1).
Устройство параллельного вхождения в синхронизм псевдошумовых сигналов, например, п.5.2.2, рис.5.2.1 [2], включающее в себя N1 корреляторов, на первые входы которых поступает входной сигнал, а на вторые входы - сигналы с N1 выходов генератора опорных сигналов, выходы корреляторов соединены с N1-входовым решающим устройством, с первого выхода которого производится выдача избранного канала, а со второго выхода - сигнал взаимокорреляционной функции между входным и опорным псевдошумовыми сигналами, поступающий на вход порогового устройства, при превышении уровня П которого выдается сигнал перехода в режим слежения, отличающееся тем, что в него введены приемник навигационного сигнала системы «ГЛОНАСС» («GPS»), эталон частоты, местная шкала времени, схема И, схема НЕ, блок ключей, ОЗУ, причем выход точной временной метки приемника навигационного сигнала системы «ГЛОНАСС» («GPS») соединяют с синхронизирующим входом эталона частоты, выход которого соединяют с местной шкалой времени, синхронизирующий выход которой через схему НЕ соединяют с выходом порогового устройства, выход схемы И соединяют с управляющим входом блока ключей, k входов которого соединены с k-параллельными выходами ОЗУ, на вход которого подают установочный код с j-фазой, k-разрядный выход блока ключей соединяют с установочными входами генератора опорных сигналов, N1 выходов которого соединяют с N1 входами опорных сигналов корреляторов.
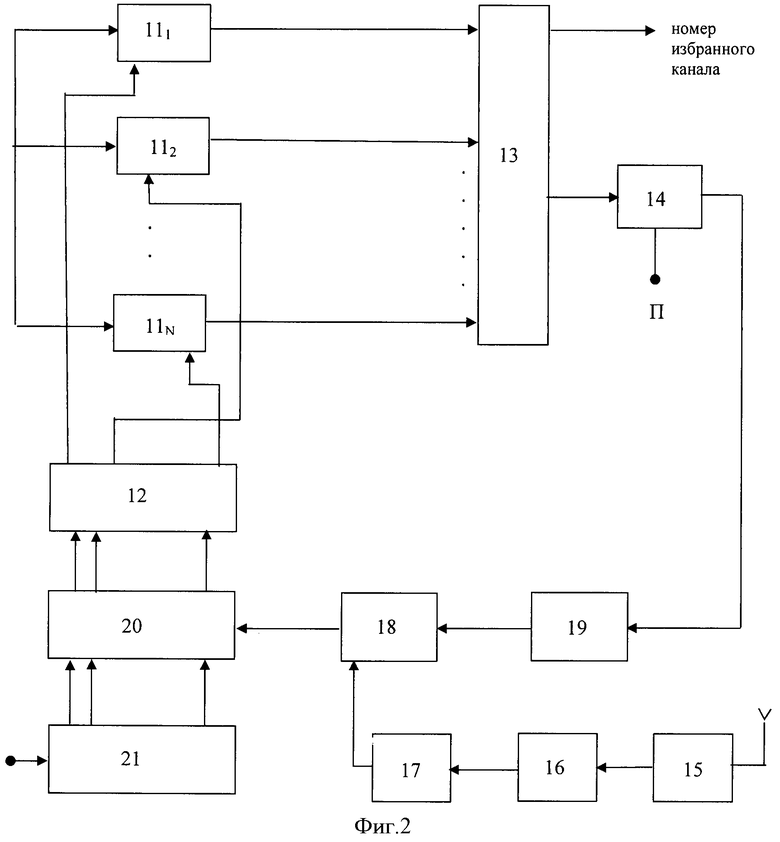
На фиг.2 представлена структурная схема устройства параллельного вхождения в синхронизм псевдошумового сигнала, где:
111, 112 … 11N1 - корреляторы;
12 - генератор опорных сигналов;
13 - решающее устройство (схема выбора сигнала по максимуму);
14 - пороговое устройство;
15 - приемник навигационного сигнала системы «ГЛОНАСС» («GPS»);
16 - эталон частоты;
17 - местная шкала времени;
18 - схема И;
19 - схема НЕ;
20 - блок ключей;
21 - ОЗУ.
 ; Т - максимальное время рассогласования фаз входного и опорного псевдошумовых сигналов;
; Т - максимальное время рассогласования фаз входного и опорного псевдошумовых сигналов;
τс - длительность символа ПШ сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ПРИ ИСПОЛЬЗОВАНИИ СЛОЖНЫХ ПСЕВДОШУМОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2387085C1 |
| СПОСОБ ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ПРИ ИСПОЛЬЗОВАНИИ СЛОЖНЫХ ПСЕВДОШУМОВЫХ СИГНАЛОВ С ДИСКРЕТНО ИЗМЕНЯЕМОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2387084C1 |
| СПОСОБ ОБРАБОТКИ СЛОЖНЫХ КВАЗИОПТИМАЛЬНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2377644C1 |
| СПОСОБ ФОРМИРОВАНИЯ СЛОЖНЫХ КВАЗИОПТИМАЛЬНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2379826C2 |
| УСТРОЙСТВО ОБРАБОТКИ МНОЖЕСТВА ПСЕВДОШУМОВЫХ СИГНАЛОВ | 2009 |
|
RU2403675C1 |
| СПОСОБ ПРОВЕДЕНИЯ СИНХРОНИЗАЦИИ БОРТОВОЙ ШКАЛЫ ВРЕМЕНИ | 2009 |
|
RU2408044C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СПОСОБ ОБРАБОТКИ ПСЕВДОШУМОВОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2331103C1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
Изобретение относится к области радиотехники, а именно к передаче информации в космических командных радиолиниях, использующих псевдошумовые сигналы. Технический результат - сокращение времени вхождения в синхронизм при последовательном поиске и сокращение числа каналов при параллельном поиске псевдошумового сигнала. Для этого на приемной стороне j-ю фазу опорного сигнала привязывают к сетке временных импульсов местной шкалы времени, которую синхронизируют от приемника навигационного сигнала системы «ГЛОНАСС» («GPS»), а с передающей стороны j-ю фазу псевдошумового сигнала передают с опережением на время распространения по каналу связи и точностной поправки рассогласования по времени между приемной и передающей сторонами, причем при переходе в режим слежения за принятым сигналом принудительную установку фазы опорного сигнала отключают, при этом устройство параллельного вхождения в синхронизм псевдошумовых сигналов по задержке включает в себя N-канальную квазиоптимальную схему обнаружения псевдошумового сигнала, приемник навигационного сигнала системы «ГЛОНАСС» («GPS»), эталон частоты, местную шкалу времени, схему И, схему НЕ, блок ключей, ОЗУ, связанные между собой. 3 н.п. ф-лы, 2 ил.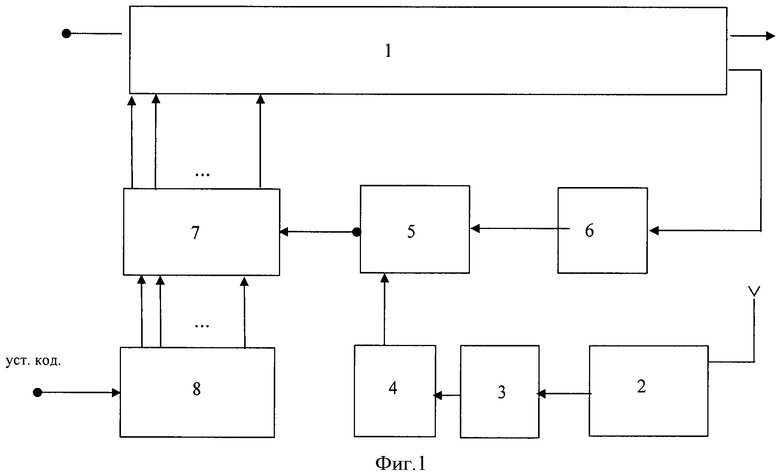
1. Способ вхождения в синхронизм псевдошумовых сигналов по задержке, включающий в себя поиск фазы принимаемого сигнала, отличающийся тем, что на передающей стороне j-ю фазу псевдошумового сигнала передают с опережением относительно метки эталона единого времени на время распространения по каналу связи и учета взаимной точностной поправки, включающей задержку в передатчике, приемнике, а также направление поиска сигнала, на приемной стороне j-ю фазу опорного сигнала привязывают к соответствующей временной метке местной шкалы времени, которую синхронизируют от аппаратуры приема навигационного сигнала системы «ГЛОНАСС» («GPS»), при переходе в режим слежения за принятым сигналом принудительную установку фазы опорного сигнала отключают и возобновляют ее действие при выходе входного сигнала из режима слежения.
2. Устройство последовательного вхождения в синхронизм псевдошумовых сигналов по задержке, включающее корреляционную схему выделения информации, на первый вход которой подается входной сигнал, с основного выхода снимаются результаты обработки входной информации, а со второго выхода - сигнал режима слежения, отличающееся тем, что в него введены приемник навигационного сигнала системы «ГЛОНАСС» («GPS»), эталон частоты, местная шкала времени, схема И, схема НЕ, блок ключей, ОЗУ, причем выход временной метки приемника навигационного сигнала системы «ГЛОНАСС» («GPS») соединяют с синхронизирующим входом эталона частоты, выход которого соединяют с входом местной шкалы времени, выход которой соединяют с первым входом схемы И, второй вход которой соединяют с выходом схемы НЕ, вход которой соединяют со вторым выходом корреляционной схемы выделения псевдошумового сигнала, выход схемы И соединяют с управляющим входом блока ключей, k-входов которого соединяют с k-параллельными выходами ОЗУ, на вход которого подают установочный код с j-й фазой, с выходов блока ключей установочный код с j-й фазой поступает на второй вход корреляционной схемы выделения псевдошумовых сигналов.
3. Устройство параллельного вхождения в синхронизм псевдошумовых сигналов, содержащее N-канальную квазиоптимальную схему обнаружения псевдошумового сигнала, включающее в себя N1 корреляторов, на первые входы которых поступает входной сигнал, а на вторые входы - сигналы с N1 выходов генератора опорных сигналов, выходы корреляторов соединены с N1-входовым решающим устройством, с первого выхода которого производится выдача принимаемого сигнала, а со второго выхода - сигнал взаимокорреляционной функции между входным и опорным псевдошумовыми сигналами, поступающий на вход порогового устройства, при превышении уровня П которого выдается сигнал перехода в режим слежения, отличающееся тем, что в него введены приемник навигационного сигнала системы «ГЛОНАСС» («GPS»), эталон частоты, местная шкала времени, схема И, схема НЕ, блок ключей, ОЗУ, причем выход временной метки приемника навигационного сигнала системы «ГЛОНАСС» («GPS») соединяют с синхронизирующим входом эталона частоты, выход которого соединяют с местной шкалой времени, синхронизирующий выход которой соединяют с первым входом схемы И, второй вход которой через схему НЕ соединяют с выходом порогового устройства, выход схемы И соединяют с управляющим входом блока ключей, k-входов которого соединены с k-параллельными выходами ОЗУ, на вход которого подают установочный код с j-й фазой, k выходов блока ключей соединяют с установочными входами генератора опорных сигналов, N1 выходов которого соединяют с N1 входами опорных сигналов корреляторов.
| RU 2006141281 A, 10.06.2008 | |||
| ФИЛЬТР С КОНЕЧНЫМ ИМПУЛЬСНЫМ ОТКЛИКОМ НА БАЗЕ ПЗУ ДЛЯ ИСПОЛЬЗОВАНИЯ В МОБИЛЬНОМ ТЕЛЕФОНЕ | 1997 |
|
RU2189109C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМАХ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ И ПРОГРАММНЫЙ ПРОДУКТ | 2003 |
|
RU2277760C2 |
| JP 3117035 A, 17.05.1991 | |||
| WO 9506978 A1, 09.03.1995 | |||
| US 5930157 A, 27.07.1999. | |||

