Изобретение относиться к ручным тележкам для перевозки грузов.
Известна ручная хозяйственная тележка /см. патент. RU №2223191, кл. B62B 1/12, 2004 г./, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации.
Известна также ручная хозяйственная тележка /см. патент RU №2282550, кл. В62В 1/12, 2006 г./, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации, механизм перемещения ходовых колес на оси выполнен в виде направляющих стержней, жестко закрепленных на оси ходовых колес продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами, жестко закрепленными на упорном элементе в продольной горизонтальной плоскости и поддерживаемыми на грузонесущей платформе снизу посредством удерживающих кронштейнов, жесткая рамка смонтирована посредством поперечной оси на направляющих стержнях между осью ходовых колес и свободными концами направляющих стержней, механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны, жестко смонтированные снизу грузонесущей платформы с жестким примыканием к удерживающим кронштейнам, со сквозными продольными пазами и глухими ячейками, выполненными на наружных поверхностях кронштейнов в вертикальной плоскости перпендикулярно оси пазов с возможностью взаимодействия с фиксаторами, закрепленными на держателях, смонтированных соосно верхней оси жесткой рамки продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах кронштейнов и подпружиненных относительно последних посредством пружин сжатия, при этом держатели на внутренних свободных концах включают жестко закрепленные направляющие шайбы, взаимодействующие с пружинами сжатия.
Недостатком известной ручной хозяйственной тележки является то, что для перевода в статическом положении оси ходовых колес тележки с грузом под грузонесущую платформу или за ее пределы необходимо наклониться, задействовать обе руки для прикладывания осевого усилия к рукояткам держателей в противоположные стороны от тележки, одновременно дополнительно поддерживая тележку посторонней помощью, до момента фиксации в нужном положении оси с ходовыми колесами.
Задачей предложенного решения является повышение удобства эксплуатации.
Эта задача достигается тем, что ручная хозяйственная тележка содержит опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации, механизм перемещения ходовых колес на оси выполнен в виде направляющих стержней, жестко закрепленных на оси ходовых колес продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами, жестко закрепленными на упорном элементе в продольной горизонтальной плоскости и поддерживаемыми на грузонесущей платформе снизу посредством удерживающих кронштейнов, жесткая рамка смонтирована посредством поперечной оси на направляющих стержнях между осью ходовых колес и свободными концами направляющих стержней, механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны, жестко смонтированные снизу грузонесущей платформы с жестким примыканием к удерживающим кронштейнам, со сквозными продольными пазами и глухими ячейками, выполненными на наружных поверхностях кронштейнов в вертикальной плоскости перпендикулярно оси пазов с возможностью взаимодействия с фиксаторами, закрепленными на держателях, смонтированных соосно верхней оси жесткой рамки продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах кронштейнов и подпружиненных относительно последних посредством пружин сжатия, при этом держатели на внутренних свободных концах включают жестко закрепленные направляющие шайбы, взаимодействующие с пружинами сжатия, механизм перемещения ходовых колес на оси дополнительно снабжен механизмом ручного управления, включающим закрепленный на опорной раме с возможностью осевого перемещения в вертикальной плоскости жесткий трубчатый элемент, несущий внутри трос, с возможностью осевого перемещения последнего относительно трубчатого элемента, на верхнем свободном конце трубчатого элемента жестко закреплена неподвижная рукоятка, конец которой шарнирно сопряжен и подпружинен относительно подвижной в вертикальной плоскости упорной пластины, включающей на свободном конце вилку с фиксатором, закрепленным к концу троса, с возможностью перемещения фиксатора в пазу, выполненном в трубчатом элементе, нижний свободный конец трубчатого элемента жестко сопряжен с концом гибкого полого элемента, несущего внутри продолжения троса от жесткого трубчатого элемента, с возможностью осевого перемещения гибкого полого элемента в L-образной оправке, закрепленной в нижней части на опорной раме, второй конец гибкого полого элемента жестко закреплен на верхней оси жесткой рамки, механизм фиксации включает трапециеобразный плоский упор, жестко закрепленный в горизонтальной плоскости на втором конце троса и обращенный меньшим основанием в сторону гибкого полого элемента с возможностью перемещения в осевом направлении в горизонтальной плоскости и взаимодействия боковыми поверхностями со свободными концами держателей, большее основание трапециеобразного плоского упора выполнено с возможностью взаимодействия с ограничителем, жестко закрепленным на верхней оси жесткой рамки, причем свободные концы держателей выполнены выпуклыми, а боковые поверхности трапециеобразного плоского упора - вогнутыми, копирующими поверхности свободных концов держателей.
По сравнению с известной предложенная ручная хозяйственная тележка обеспечивает исключение наклона туловища для задействования обеих рук по прикладыванию осевого усилия к рукояткам держателей в противоположные стороны от тележки при одновременном дополнительном поддержании тележки посторонней помощью до момента фиксации в нужном положении оси с ходовыми колесами, повышая удобство эксплуатации.
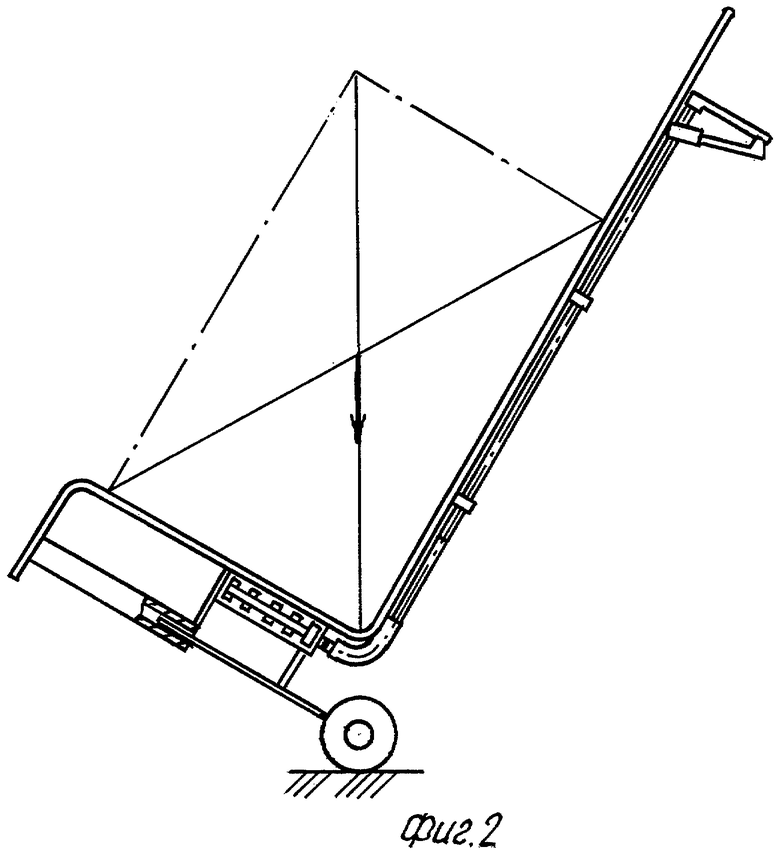
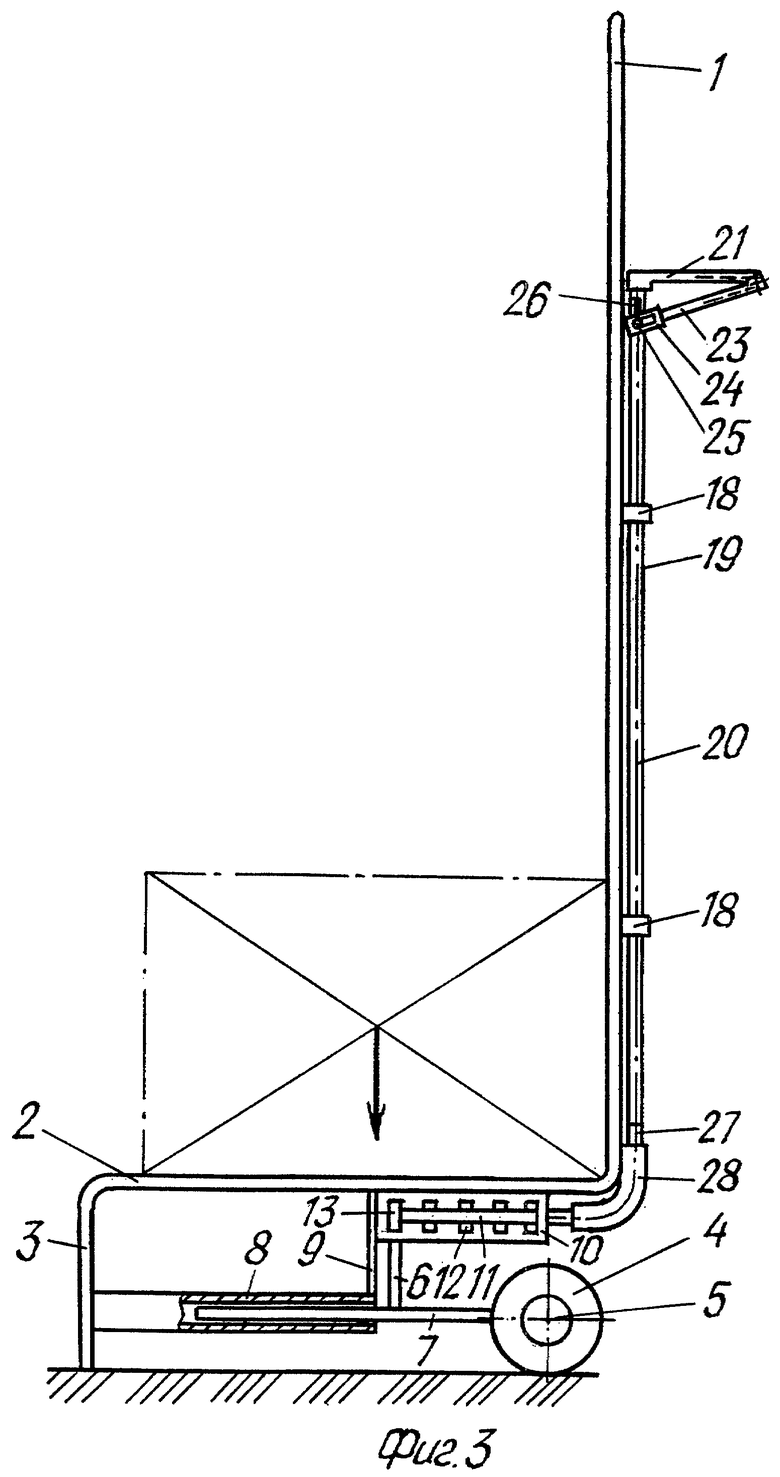
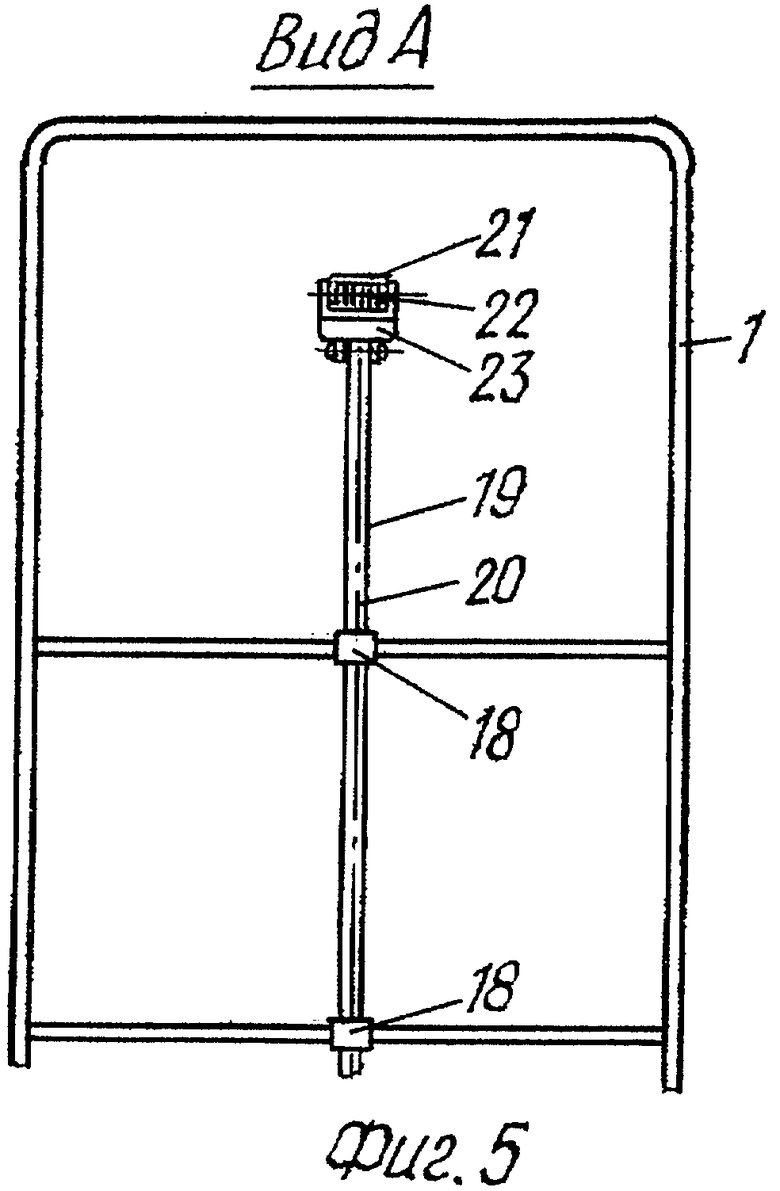
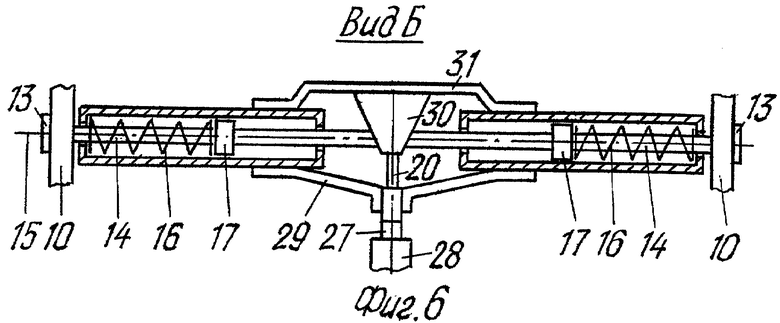
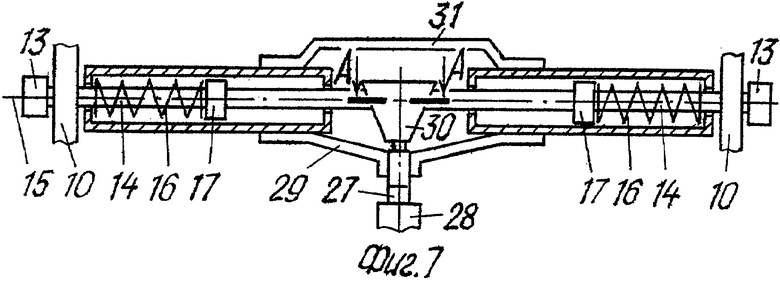
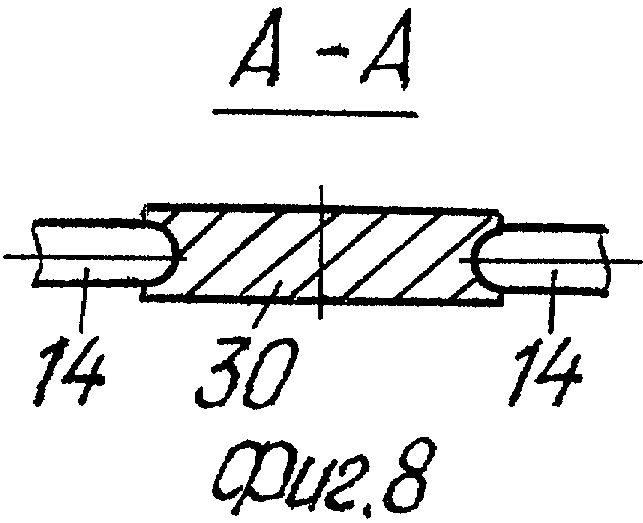
На фиг.1 изображена тележка в статическом положении, ось колеса вынесена за пределы грузонесущей платформы; на фиг.2 - то же, в движении; на фиг.3 - тележка в статическом положении, ось колеса расположена под грузонесущей платформой; на фиг.4 - то же, в движении; на фиг.5 - вид А на фиг.1; на фиг.6 - вид Б на фиг.1; на фиг.7 - то же, фиксаторы выдвинуты с ячеек; на фиг.8 - разрез А-А на фиг.7.
Ручная хозяйственная тележка содержит опорную раму 1, жестко сопряженную с грузонесущей платформой 2, включающей снизу упорный элемент 3, ходовые колеса 4 на оси 5. Механизм перемещения ходовых колес 4 на оси 5 образует жесткую рамку 6 в поперечной вертикальной плоскости и выполнен в виде направляющих стержней 7, жестко закрепленных на оси 5 ходовых колес 4 продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами 8, жестко закрепленными на упорном элементе 3 в продольной горизонтальной плоскости и поддерживаемыми на грузонесущей платформе 2 снизу посредством удерживающих кронштейнов 9. Жесткая рамка 6 смонтирована посредством поперечной оси на направляющих стержнях 7 между осью 5 ходовых колес 4 и свободными концами направляющих стержней 7. Механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны 10, жестко смонтированные снизу грузонесущей платформы 2 с жестким примыканием к удерживающим кронштейнам 9, со сквозными продольными пазами 11 и глухими ячейками 12, выполненными на наружных поверхностях кронштейнов 10 в вертикальной плоскости перпендикулярно оси пазов 11 с возможностью взаимодействия с фиксаторами 13, закрепленными на держателях 14, смонтированных соосно верхней оси 15 жесткой рамки 6 продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах 11 кронштейнов 10 и подпружиненных относительно последних посредством пружин 16 сжатия, при этом держатели 14 на внутренних свободных концах включают жестко закрепленные направляющие шайбы 17, взаимодействующие с пружинами 16 сжатия. Механизм перемещения ходовых колес 4 на оси 5 дополнительно снабжен механизмом ручного управления, включающим закрепленный на опорной раме 1 с возможностью осевого перемещения в вертикальной плоскости посредством направляющих 18 жесткий трубчатый элемент 19, несущий внутри трос 20, с возможностью осевого перемещения последнего относительно трубчатого элемента 19. На верхнем свободном конце трубчатого элемента 19 жестко закреплена неподвижная рукоятка 21, конец которой шарнирно сопряжен и подпружинен посредством пружины 22 относительно подвижной в вертикальной плоскости упорной пластины 23, включающей на свободном конце втулку 24 с фиксатором 25, закрепленным к концу троса 20, с возможностью перемещения фиксатора 25 в пазу 26, выполненном в трубчатом элементе 19. Нижний свободный конец трубчатого элемента 19 жестко сопряжен с концом гибкого полого элемента 27, относительно жесткого в осевом направлении и гибкого в поперечной плоскости, несущего внутри продолжение троса 20 от жесткого трубчатого элемента 19, с возможностью осевого перемещения гибкого полого элемента 27 в L-образной оправке 28, закрепленной в нижней части на опорной раме 1. Второй конец гибкого полого элемента 27 жестко закреплен посредством кронштейна 29 на верхней оси 15 жесткой рамки 6. Механизм фиксации включает трапециеобразный плоскости упор 30, жестко закрепленный в горизонтальной плоскости на втором конце троса 20 и обращенный меньшим основанием в сторону гибкого полого элемента 27 с возможностью перемещения в осевом направлении в горизонтальной плоскости и взаимодействия боковыми поверхностями со свободными концами держателей 14. Большее основание трапециеобразного плоского упора 30 выполнено с возможностью взаимодействия с ограничителем 31, жестко закрепленным на верхней оси 15 жесткой рамки 6. Причем свободные концы держателей 14 выполнены выпуклыми, а боковые поверхности трапециеобразного плоского упора 30 - вогнутыми, копирующими поверхности свободных концов держателей 14.
Ручная хозяйственная тележка работает следующим образом.
В зависимости от габаритных размеров груза по высоте, а следовательно, в зависимости от высоты расположения центра тяжести груза над опорной поверхностью визуально определяется и вручную координируется расположение ходовых колес 4 по отношению к грузонесущей платформе 2 таким образом, чтобы при движении тележки центр тяжести груза по вертикали по возможности максимально совпал с осью 5 ходовых колес 4, обеспечивая наиболее физическим усилием. При необходимости, во время начала движения, возможна остановка тележки для корректировки координации ходовых колес 4 по отношению к грузонесущей платформе 2 в ту или иную сторону.
При высоком расположении центра тяжести груза /см. фиг.1/ координация расположения ходовых колес 4 по отношению к грузонесущей платформе 2 осуществляется следующим образом.
Преодолевая усилие пружины 22, прикладывается вручную усилие к упорной пластине 23 в сторону неподвижной рукоятки 21. Трос 20 под действием вилки 24 с фиксатором 25 посредством паза 26 перемещается в полостях трубчатого элемента 19 и гибкого полого элемента 27 в осевом направлении в сторону неподвижной рукоятки 21. При этом боковые поверхности трапециеобразного плоского упора 30, взаимодействуя со свободными концами держателей 14 посредством направляющих шайб 17, сжимают пружины 16 сжатия, выводя фиксаторы 13 из зацепления с глухими ячейками 12. Не снимая усилие с упорной пластины 23, прикладывается вертикальное усилие к неподвижной рукоятке 21 таким образом, чтобы ось 5 с ходовыми колесами 4 заняла необходимое положение за пределами грузонесущей платформы 2. Одновременно гибкий полый элемент 27 перемещается в осевом направлении относительно L-образной оправки 28, а жесткий трубчатый элемент 19 перемещается в осевом направлении относительно направляющих 18. При этом держатели 14 перемещаются в продольных пазах 11 кронштейнов 10 до совпадения фиксаторов 13 с необходимыми полостями глухих ячеек 12, а направляющие стержни 7 выдвигаются из соответствующих направляющих гильз 8 наружу. Снимается одновременно усилие с неподвижной рукоятки 21 и упорной пластины 23. При этом упорная пластина 23 под действием распрямляющегося усилия пружины 22 через вилку 24 с фиксатором 25 посредством паза 26 передает осевое усилие на трос 20, который перемещаясь в полостях трубчатого элемента 19 и гибкого полого элемента 27, перемещает трапециеобразный плоский упор 30 до взаимодействия его большего основания с ограничителем 31. Направляющие шайбы 17 держателей 14 под действием распрямляющегося усилия пружин 16 сжатия перемещаются внутри верхней оси 15 жесткой рамки 6 и занимают исходное положение. Фиксаторы 13 взаимодействуют в зацеплении с соответствующими полостями глухих ячеек 12. Тележка подготовлена для транспортировки груза.
При низком расположение цента тяжести груза /см. фиг.3/ координация расположения ходовых колес 4 по отношению к грузонесущей платформе 2 осуществляется следующим образом.
Преодолевая усилия пружины 22, прикладывается вручную усилие к упорный пластине 23 в сторону неподвижной рукоятки 21. Трос 20 под действием вилки 24 с фиксатором 25 посредством паза 26 перемещается в полостях трубчатого элемента 19 и гибкого полого элемента 27 в осевом направлении в сторону неподвижной рукоятки 21. При этом боковые поверхности трапециеобразного плоского упора 30, взаимодействуя со свободными концами держателей 14 посредством направляющих шайб 17, сжимают пружины 16 сжатия, выводя фиксаторы 13 из зацепления с глухими ячейками 12. Не снимая усилие с упорной пластины 23, прикладывается вертикальное усилие к неподвижной рукоятке 21 таким образом, чтобы ось 5 с ходовыми колесами 4 заняла необходимое положение под грузонесущей платформой 2. Одновременно гибкий полый элемент 27 перемещается в осевом направлении относительно L-образной оправки 28, а жесткий элемент 19 перемещается в осевом направлении относительно направляющих 18. При этом держатели 14 перемещаются в продольных пазах 11 кронштейнов 10 до совпадения фиксаторов 13 с необходимыми полостями глухих ячеек 12, а направляющие стержни 7 вдвигаются в соответствующие направляющие гильзы 8 внутрь. Снимается одновременно усилие с неподвижной рукоятки 21 и упорной пластины 23. При этом упорная пластина 23 под действием распрямляющегося усилия пружины 22 через вилку 24 с фиксатором 25 посредством паза 26 передает осевое усилие на трос 20, который перемещаясь в полостях трубчатого элемента 19 и гибкого полого элемента 27, перемещает трапециеобразный плоский упор 30 до взаимодействия его большего основания с ограничителем 31. Направляющие шайбы 17 держателей 14 под действием распрямляющегося усилия пружин 16 сжатия перемещаются внутри верхней оси 15 жесткой рамки 6 и занимают исходное положение. Фиксаторы 13 взаимодействуют в зацеплении с соответствующими полостями глухих ячеек 12. Тележка подготовлена для транспортировки груза.
Ограничитель 31, закрепленный на наружной поверхности верхней оси 15, предназначен, с одной стороны, для обеспечения жесткости верхней оси 15, с другой стороны, для ограничения движения в осевом направлении трапециеобразного плоского упора 30 и исключения выхода боковых поверхностей последнего из взаимодействия со свободными концами держателей 14.
Свободные концы держателей 14 выполнены выпуклыми, а боковые поверхности трапециеобразного плоского упора 30 - вогнутыми, копирующими поверхности свободных концов держателей 14, для более надежного контакта взаимодействующих поверхностей, исключающих провисание трапециеобразного плоского упора 30 на конце гибкого троса 20 в горизонтальной плоскости по отношению к свободным концам держателей 14.
Гибкий полый элемент 27 выполнен гибким в поперечной плоскости и относительно жестким в осевом направлении, обеспечивающим передачу осевого усилия от неподвижной рукоятки 21 по перемещению в горизонтальной плоскости верхней оси 15 вместе с осью 5 ходовых колес 4.
Кронштейн 29, закрепленный на наружной поверхности верхней оси 15, обеспечивает жесткость последней и фиксацию конца гибкого полого элемента 27 на верхней оси 15.
L-образная оправка 28, жестко закрепленная в нижней части на опорной раме 1, обеспечивает изменение осевого движения гибкого полого элемента 27 с тросом 20 из вертикальной плоскости в горизонтальную.
Таким образом, предлагаемая ручная хозяйственная тележка обеспечивает исключение наклона туловища для задействования обеих рук по прикладыванию осевого усилия к рукояткам держателей в противоположные стороны от тележки при одновременном поддержании тележки посторонней помощью до момента фиксации в нужном положении оси с ходовыми, повышая удобство эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282550C1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282549C1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2001 |
|
RU2223191C2 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2000 |
|
RU2179519C2 |
| ПРАВИЛО | 2008 |
|
RU2385393C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ С САННОГО ХОДА НА КОЛЕСНЫЙ | 2016 |
|
RU2631143C1 |
| ГРУЗОНЕСУЩАЯ ТЕЛЕЖКА | 2020 |
|
RU2751256C1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБ | 2004 |
|
RU2280245C2 |
| КОЛЕСНАЯ ПАРА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2018 |
|
RU2692506C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ С САННОГО ХОДА НА КОЛЕСНЫЙ | 2010 |
|
RU2423270C1 |

Изобретение относится к ручным тележкам для перевозки грузов. В ручной хозяйственной тележке механизм перемещения ходовых колес на оси дополнительно снабжен механизмом ручного управления, включающим закрепленный на опорной раме с возможностью осевого перемещения в вертикальной плоскости жесткий трубчатый элемент, несущий внутри трос, с возможностью осевого перемещения последнего относительно трубчатого элемента. На верхнем свободном конце трубчатого элемента жестко закреплена неподвижная рукоятка, конец которой шарнирно сопряжен и подпружинен относительно подвижной в вертикальной плоскости упорной пластины, включающей на свободном конце вилку с фиксатором, закрепленным к концу троса, с возможностью перемещения фиксатора в пазу, выполненном в трубчатом элементе. Нижний свободный конец трубчатого элемента жестко сопряжен с концом гибкого полого элемента, несущего внутри продолжение троса от жесткого трубчатого элемента, с возможностью осевого перемещения гибкого полого элемента в L-образной оправке, закрепленной в нижней части на опорной раме. Второй конец гибкого полого элемента жестко закреплен на верхней оси жесткой рамки. Механизм фиксации включает трапециеобразный плоский упор, жестко закрепленный в горизонтальной плоскости на втором конце троса и обращенный меньшим основанием в сторону гибкого полого элемента с возможностью перемещения в осевом направлении в горизонтальной плоскости и взаимодействия боковыми поверхностями со свободными концами держателей. Большее основание трапециеобразного плоского упора выполнено с возможностью взаимодействия с ограничителем, жестко закрепленным на верхней оси жесткой рамки, причем свободные концы держателей выполнены выпуклыми, а боковые поверхности трапециеобразного плоского упора - вогнутыми, копирующими поверхности свободных концов держателей. Технический результат заключается в повышении удобства эксплуатации. 8 ил.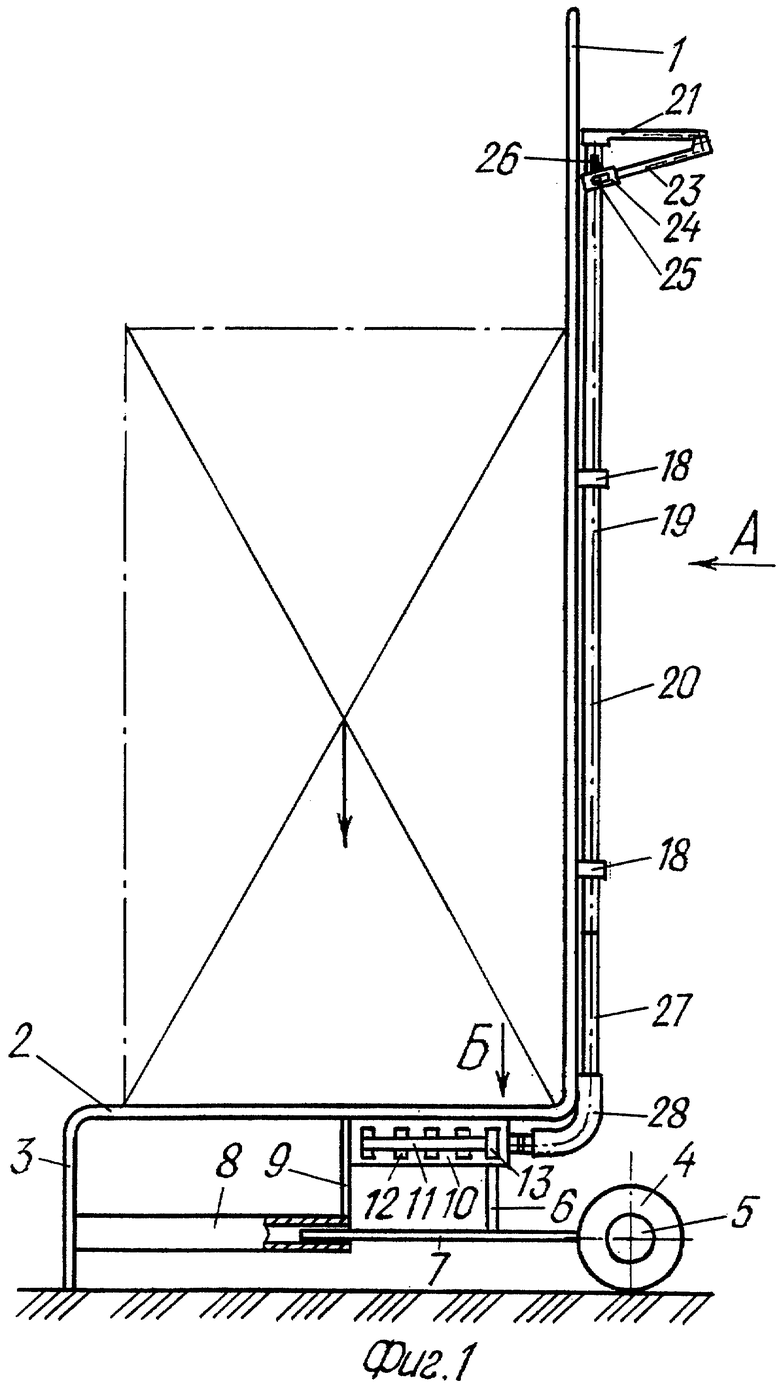
Ручная хозяйственная тележка, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации, механизм перемещения ходовых колес на оси выполнен в виде направляющих стержней, жестко закрепленных на оси ходовых колес продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами, жестко закрепленными на упорном элементе в продольной горизонтальной плоскости и поддерживаемыми на грузонесущей платформе снизу посредством удерживающих кронштейнов, жесткая рамка смонтирована посредством поперечной оси на направляющих стержнях между осью ходовых колес и свободными концами направляющих стержней, механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны, жестко смонтированные снизу грузонесущей платформы с жестким примыканием к удерживающим кронштейнам, со сквозными продольными пазами и глухими ячейками, выполненными на наружных поверхностях кронштейнов в вертикальной плоскости перпендикулярно оси пазов с возможностью взаимодействия с фиксаторами, закрепленными на держателях, смонтированных соосно с верхней осью жесткой рамки продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах кронштейнов и подпружиненных относительно последних посредством пружин сжатия, при этом держатели на внутренних свободных концах включают жестко закрепленные направляющие шайбы, взаимодействующие с пружинами сжатия, отличающаяся тем, что механизм перемещения ходовых колес на оси дополнительно снабжен механизмом ручного управления, включающим закрепленный на опорной раме с возможностью осевого перемещения в вертикальной плоскости жесткий трубчатый элемент, несущий внутри трос, с возможностью осевого перемещения последнего относительно трубчатого элемента, на верхнем свободном конце трубчатого элемента жестко закреплена неподвижная рукоятка, конец которой шарнирно сопряжен и подпружинен относительно подвижной в вертикальной плоскости упорной пластины, включающей на свободном конце вилку с фиксатором, закрепленным к концу троса, с возможностью перемещения фиксатора в пазу, выполненном в трубчатом элементе, нижний свободный конец трубчатого элемента жестко сопряжен с концом гибкого полого элемента, несущего внутри продолжение троса от жесткого трубчатого элемента, с возможностью осевого перемещения гибкого полого элемента в L-образной оправке, закрепленной в нижней части на опорной раме, второй конец гибкого полого элемента жестко закреплен на верхней оси жесткой рамки, механизм фиксации включает трапециеобразный плоский упор, жестко закрепленный в горизонтальной плоскости на втором конце троса и обращенный меньшим основанием в сторону гибкого полого элемента с возможностью перемещения в осевом направлении в горизонтальной плоскости и взаимодействия боковыми поверхностями со свободными концами держателей, большее основание трапециеобразного плоского упора выполнено с возможностью взаимодействия с ограничителем, жестко закрепленным на верхней оси жесткой рамки, причем свободные концы держателей выполнены выпуклыми, а боковые поверхности трапециеобразного плоского упора - вогнутыми, копирующими поверхности свободных концов держателей.
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282550C1 |
| US 6149168 A, 21.11.2000 | |||
| Способ управления трехфазным непосредственным преобразователем частоты | 1981 |
|
SU1145447A1 |
| US 2005017467 A1, 27.01.2005. | |||

