Изобретение относится к ручным тележкам для перевозки грузов.
Известна ручная хозяйственная тележка /см. патент US №4989889, кл. В 62 В 1/12, 1991 г./, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент и ходовые колеса на оси.
Известна также ручная хозяйственная тележка /см. патент RU №2223191, кл. В 62 В 1/12, 2004 г./, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации.
Недостатком известной ручной хозяйственной тележки является то, что для перевода в статическом положении оси ходовых колес тележки с грузом под грузонесущую платформу или за ее пределы необходимо дополнительное поддерживание тележки посторонней помощью, во избежание складывания шарнирного многозвенника под действием вертикального усилия транспортируемого груза, до момента фиксации в нужном положении оси с ходовыми колесами.
Кроме того, в статическом положении тележки с грузом, когда ось ходовых колес занимает положение либо под грузонесущей платформой, либо за ее пределами, грузонесущая платформа занимает положение, отличное от горизонтального.
Задачей предложенного решения является повышение удобства эксплуатации и расширение эксплуатационных возможностей.
Эта задача достигается тем, что ручная хозяйственная тележка, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации, механизм перемещения ходовых колес на оси выполнен в виде направляющих стержней, жестко закрепленных на оси ходовых колес продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами, жестко закрепленными на упорном элементе в продольной горизонтальной плоскости, и поддерживаемых на грузонесущей платформе снизу посредством удерживающих кронштейнов, жесткая рамка смонтирована посредством поперечной оси на направляющих стержнях между осью ходовых колес и свободными концами направляющих стержней, механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны, жестко смонтированные снизу грузонесущей платформы, с жестким примыканием к удерживающим кронштейнам со сквозными продольными пазами и глухими ячейками, выполненными на наружных поверхностях кронштейнов в вертикальной плоскости перпендикулярно оси пазов с возможностью взаимодействия с фиксаторами, жестко закрепленными на держателях, смонтированными соосно верхней оси жесткой рамки продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах кронштейнов и подпружинены относительно последних посредством пружин сжатия, включающих на наружных свободных концах жестко закрепленные рукоятки, а на внутренних свободных концах - жестко закрепленные направляющие шайбы, взаимодействующие с пружинами сжатия, причем фиксаторы смонтированы между рукоятками и направляющими шайбами держателей.
По сравнению с известной предложенная ручная хозяйственная тележка обеспечивает исключение дополнительного поддерживания тележки с грузом с посторонней помощью в статическом положении при перемещении оси с ходовыми колесами и исключает отклонение от горизонтального положения грузонесущей платформы при установке оси с ходовыми колесами под грузонесущей платформой либо за ее пределах, повышая удобство эксплуатации и расширяя эксплуатационные возможности.
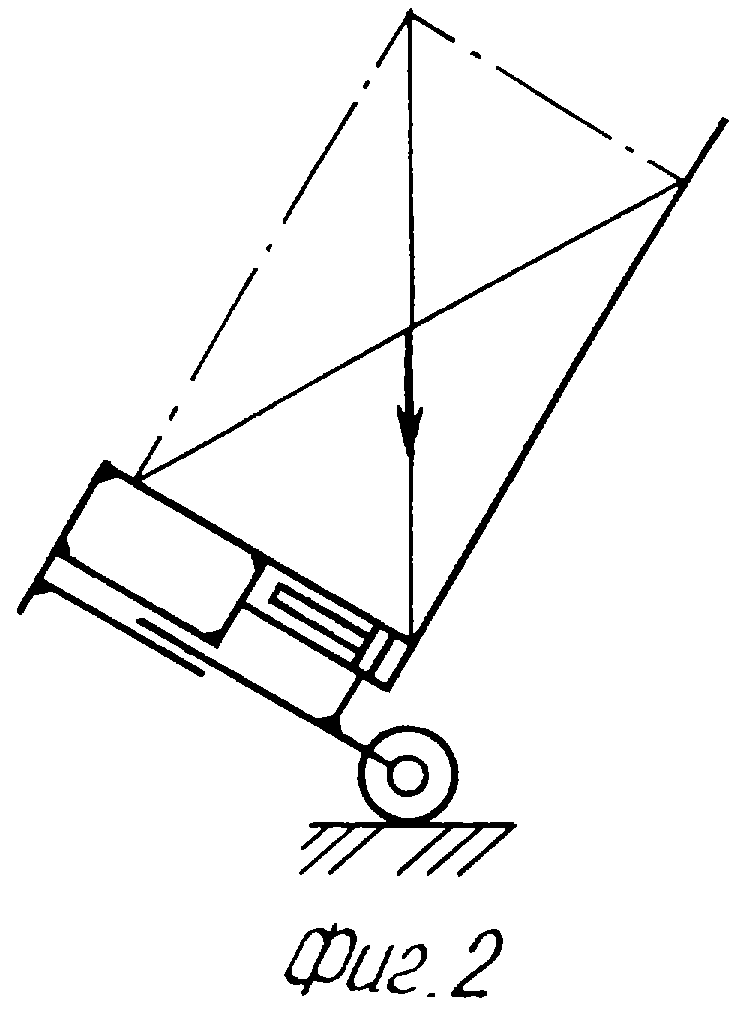
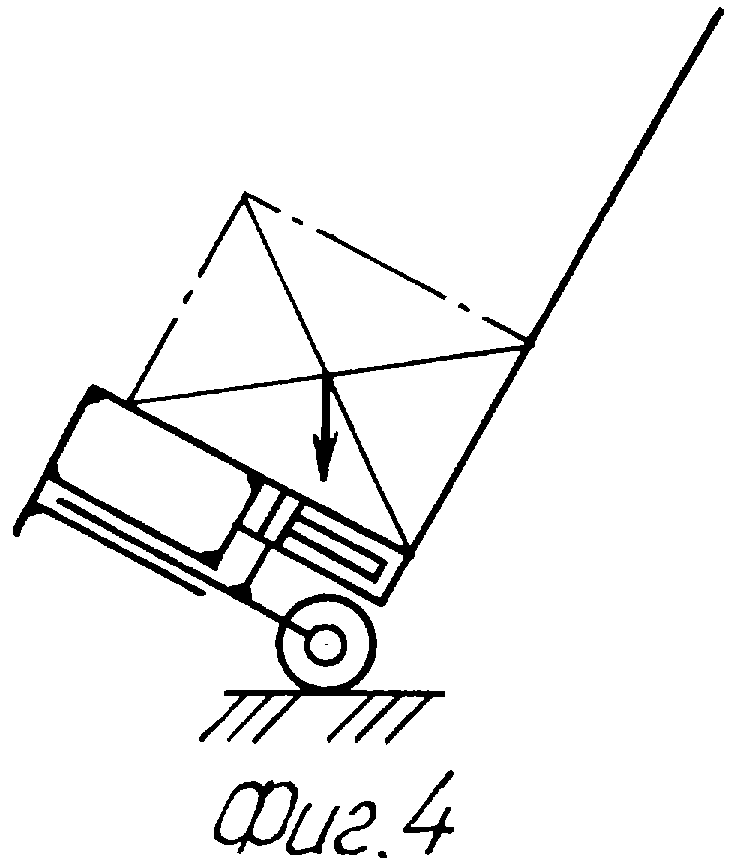
На фиг.1 изображена тележка в статическом положении, ось колеса вынесена за пределы грузонесущей платформы; на фиг.2 - то же, в движении; на фиг.3 - тележка в статическом положении, ось колеса расположена под грузонесущей платформой; на фиг.4 - то же, в движении; на фиг.5 - элемент I на фиг.1; на фиг.6 - разрез А-А на фиг.5; на фиг.7 - вид А на фиг.1; на фиг.8 - разрез Б-Б на фиг.7; на фиг.9 - разрез В-В на фиг.8.
Ручная хозяйственная тележка содержит опорную раму 1, жестко сопряженную с грузонесущей платформой 2, включающей снизу упорный элемент 3, ходовые колеса 4 на оси 5. Механизм перемещения ходовых колес 4 на оси 5 выполнен в виде направляющих стержней 6, жестко закрепленных на оси 5 ходовых колес 4 продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами 7, жестко закрепленными на упорном элементе 3 в продольной горизонтальной плоскости, и поддерживаемых на грузонесущей платформе 2 снизу посредством удерживающих кронштейнов 8. Жесткая рамка 9 смонтирована посредством поперечной оси 10 на направляющих стержнях 6 между осью 5 ходовых колес 4 и свободными концами направляющих стержней 6. Механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны 11, жестко смонтированные снизу грузонесущей платформы 2 с жестким примыканием к удерживающим кронштейнам 8, со сквозными продольными пазами 12 и глухими ячейками 13, выполненными на наружных поверхностях кронштейнов 11 в вертикальной плоскости перпендикулярно оси пазов 12 с возможностью взаимодействия с фиксаторами 14, жестко закрепленными на держателях 15, смонтированными соосно внутри верхней оси 16 жесткой рамки 9 продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах 12 кронштейнов 11 и подпружинены относительно последних посредством пружин 17 сжатия, включающих на наружных свободных концах жестко закрепленные направляющие шайбы 19, взаимодействующие с пружинами 17 сжатия, причем фиксаторы 14 смонтированы между рукоятками 18 и направляющими шайбами 19 держателей 15.
Ручная хозяйственная тележка работает следующим образом.
В зависимости от габаритных размеров груза по высоте, а следовательно, в зависимости от высоты расположения центра тяжести груза над опорной поверхностью визуально определяется и вручную координируется расположение ходовых колес 4 по отношению к грузонесущей платформе 2 таким образом, чтобы при движении тележки центр тяжести груза по вертикали по возможности максимально совпадал с осью 5 ходовых колес 4, обеспечивая наиболее благоприятный режим буксировки тележки с наименьшим физическим усилием. При необходимости, во время начала движения, возможна остановка тележки для корректировки координации ходовых колес 4 по отношению к грузонесущей платформе 2 в ту или иную сторону.
При высоком расположении центра тяжести груза /см. фиг.1/ координация расположения ходовых колес 4 по отношению к грузонесущей платформе 2 осуществляется следующим образом. Прикладывается вручную одновременно осевое усилие к рукояткам 18 в противоположные стороны от тележки. При этом направляющие шайбы 19 держателей 15 под действием приложенного осевого усилия, перемещаясь внутри верней оси 16 жесткой рамки 9, преодолевают усилие пружин 17 сжатия, фиксаторы 14 выводятся из зацепления с глухими ячейками 13. Удерживаемая за рукоятки 18 жесткая рамка 9 посредством приложения усилия в продольной горизонтальной плоскости перемещается таким образом, чтобы ось 5 с ходовыми колесами 4 заняла необходимое положение за пределами грузонесущей платформы 2. При этом держатели 15 перемещаются в продольных пазах 12 кронштейнов 11 до совпадения фиксаторов 14 с необходимыми полостями глухих ячеек 13, а направляющие стержни 6 выдвигаются из соответствующих направляющих гильз 7 наружу. Снимается одновременно осевое усилие с рукояток 18. При этом направляющие шайбы 19 держателей 15 под действием распрямляющегося усилия пружин 17 сжатия перемещаются внутри верхней оси 16 жесткой рамки 9 и занимают исходное положение. Фиксаторы 14 взаимодействуют в зацеплении с соответствующими полостями глухих ячеек 13. Тележка подготовлена для транспортировки груза.
При низком расположении центра тяжести груза /см. фиг.3/ координация расположения ходовых колес 4 по отношению к грузонесущей платформе 2 осуществляется следующим образом. Прикладывается вручную одновременно осевое усилие к рукояткам 18 в противоположные стороны от тележки. При этом направляющие шайбы 19 держателей 15 под действием приложенного осевого усилия, перемещаясь внутри верхней оси 16 жесткой рамки 9, преодолевают усилие пружин 17 сжатия, фиксаторы 14 выводятся из зацепления с глухими ячейками 13. Удерживаемая за рукоятки 18 жесткая рамка 9 посредством приложения усилия в продольной горизонтальной плоскости перемещается таким образом, чтобы ось 5 с ходовыми колесами 4 заняла необходимое положение под грузонесущей платформой 2. При этом держатели 15 перемещаются в продольных пазах 12 кронштейнов 11 до совпадения фиксаторов 14 с необходимыми полостями глухих ячеек 13, а направляющие стержни 6 вдвигаются в соответствующие направляющие гильзы 7 внутрь. Снимается одновременно осевое усилие с рукояток 18. При этом направляющие шайбы 19 держателей 15 под действием распрямляющегося усилия пружин 17 сжатия перемещаются внутри верхней оси 16 жесткой рамки 9 и занимают исходное положение. Фиксаторы 14 взаимодействуют в зацеплении с соответствующими полостями глухих ячеек 13. Тележка подготовлена для транспортировки груза.
Направляющие стержни 6, жестко закрепленные на оси 5 ходовых колес 4 продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами 7, жестко закрепленными на упорном элементе 3 в продольной горизонтальной плоскости, обеспечивают перемещение оси 5 с ходовыми колесами 4 в продольной горизонтальной плоскости при различных режимах координации оси 5 ходовых колес 4 в зависимости от габаритных размеров груза без дополнительной поддержки тележки посторонней помощью, позволяя грузонесущей платформе 2 находится всегда в горизонтальном положении, что направлено на достижение поставленной задачи. Длина направляющих стержней 6 и глубина направляющих гильз 7 выбираются таким образом, чтобы обеспечить перемещение оси 5 с ходовыми колесами 4 относительно грузонесущей платформы 2 в широком диапазоне, не ухудшая при этом жесткость конструкции в целом при крайнем выдвинутом положении направляющих стержней 6 из полостей направляющих гильз 7.
Удерживающие кронштейны 8, закрепленные снизу на грузонесущей платформе 2 и поддерживающие направляющие гильзы 7 в продольной горизонтальной плоскости с одной стороны и выполнены с жестким примыканием к кронштейнам 11 с другой стороны, увеличивают общую жесткость конструкции.
Жесткая рамка 9, смонтированная посредством поперечной оси 10 на направляющих стержнях 6 между осью 5 ходовых колес 4 и свободными концами направляющих стержней 6, обеспечивает координацию оси 5 с ходовыми колесами 4 по отношению к грузонесущей платформе 2 при различных режимах эксплуатации, обеспечивая достижение поставленной задачи.
Механизм фиксации обеспечивает фиксацию жесткой рамки 9 с ходовыми колесами 4 при заданных условиях эксплуатации в движении.
Таким образом, предлагаемая ручная хозяйственная тележка обеспечивает исключение дополнительного поддерживания тележки с грузом с посторонней помощью в статическом положении при перемещении оси с ходовыми колесами и исключает отклонение от горизонтального положения грузонесущей платформы при установке оси с ходовыми колесами под грузонесущей платформой либо за ее пределами, повышая удобство эксплуатации и расширяя эксплуатационные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2007 |
|
RU2333861C1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2001 |
|
RU2223191C2 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282549C1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2000 |
|
RU2179519C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЕДЯНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2736796C1 |
| ГРУЗОНЕСУЩАЯ ТЕЛЕЖКА | 2020 |
|
RU2751256C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ С САННОГО ХОДА НА КОЛЕСНЫЙ | 2016 |
|
RU2631143C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ С САННОГО ХОДА НА КОЛЕСНЫЙ | 2010 |
|
RU2423270C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЦЕПИ | 2003 |
|
RU2257991C2 |
| Ручное устройство для подъема и перемещения крышек коксовых печей | 2021 |
|
RU2750962C1 |






Изобретение относится к ручным тележкам для перевозки грузов. Тележка содержит опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации. Механизм перемещения ходовых колес на оси выполнен в виде направляющих стержней, жестко закрепленных на оси ходовых колес продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами, жестко закрепленными на упорном элементе в продольной горизонтальной плоскости и поддерживаемыми на грузонесущей платформе снизу посредством удерживающих кронштейнов. Жесткая рамка смонтирована посредством поперечной оси на направляющих стержнях между осью ходовых колес и свободными концами направляющих стержней. Механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны, жестко смонтированные снизу грузонесущей платформы с жестким примыканием к удерживающим кронштейнам, со сквозными продольными пазами и глухими ячейками, выполненными на наружных поверхностях кронштейнов в вертикальной плоскости перпендикулярно оси пазов с возможностью взаимодействия с фиксаторами, жестко закрепленными на держателях, смонтированных соосно верхней оси жесткой рамки продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах кронштейнов и подпружиненных относительно последних посредством пружин сжатия. Держатели включают на наружных свободных концах жестко закрепленные рукоятки, а на внутренних свободных концах - жестко закрепленные направляющие шайбы, взаимодействующие с пружинами сжатия. Фиксаторы смонтированы между рукоятками и направляющими шайбами держателей. Технический результат изобретения заключается в повышении удобства эксплуатации и расширении эксплуатационных возможностей. 9 ил.
Ручная хозяйственная тележка, содержащая опорную раму, жестко сопряженную с грузонесущей платформой, включающей снизу упорный элемент, ходовые колеса на оси, механизм перемещения ходовых колес на оси, образующий с частями упорного элемента жесткую рамку в поперечной вертикальной плоскости с возможностью перемещения и фиксации последней в промежуточных положениях механизмом фиксации, отличающаяся тем, что механизм перемещения ходовых колес на оси выполнен в виде направляющих стержней, жестко закрепленных на оси ходовых колес продольно по бокам в горизонтальной плоскости с возможностью осевого перемещения и взаимодействия свободными концами с направляющими гильзами, жестко закрепленными на упорном элементе в продольной горизонтальной плоскости и поддерживаемыми на грузонесущей платформе снизу посредством удерживающих кронштейнов, жесткая рамка смонтирована посредством поперечной оси на направляющих стержнях между осью ходовых колес и свободными концами направляющих стержней, механизм фиксации смонтирован по бокам в продольной вертикальной плоскости и включает кронштейны, жестко смонтированные снизу грузонесущей платформы с жестким примыканием к удерживающим кронштейнам, со сквозными продольными пазами и глухими ячейками, выполненными на наружных поверхностях кронштейнов в вертикальной плоскости перпендикулярно оси пазов с возможностью взаимодействия с фиксаторами, жестко закрепленными на держателях, смонтированных соосно с верхней осью жесткой рамки продольно по бокам с возможностью осевого перемещения и продольного перемещения в пазах кронштейнов и подпружиненных относительно последних посредством пружин сжатия, при этом держатели включают на наружных свободных концах жестко закрепленные рукоятки, а на внутренних свободных концах - жестко закрепленные направляющие шайбы, взаимодействующие с пружинами сжатия, причем фиксаторы смонтированы между рукоятками и направляющими шайбами держателей.
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2001 |
|
RU2223191C2 |
| РУЧНАЯ ТЕЛЕЖКА | 1992 |
|
RU2022857C1 |
| Способ управления трехфазным непосредственным преобразователем частоты | 1981 |
|
SU1145447A1 |
| US 3168329, 02.02.1965. | |||

