ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу связи (обмена данными) в беспроводной сети, а более подробно к виртуальному контролю несущей в сети связи с использованием различных скоростей передачи данных, и способу беспроводной связи, использующему этот способ.
УРОВЕНЬ ТЕХНИКИ
В последнее время существует возрастающая потребность в высокоскоростных сетях связи, обусловленная широко распространенным публичным использованием сети Интернет и стремительным увеличением мультимедийных данных. С тех пор как локальные сети (LAN) появились в конце 1980-ых, скорость передачи данных по сети Интернет радикально возросла от приблизительно 1 Мбит/с до приблизительно 100 Мбит/с в наше время. Таким образом, высокоскоростная передача по сети Эзернет (Ethernet) получила популярность и широко распространенное применение в наши дни. До сих пор не прекращались интенсивные исследования в области сети Эзернет с гигабитной скоростью. Возрастающая заинтересованность в беспроводных сетевых соединениях и связи инициировала исследования и реализацию беспроводных локальных сетей (WLAN). В настоящий момент имеет место растущая доступность WLAN потребителям. Несмотря на то что использование WLAN может быть затруднено вследствие деградации рабочих характеристик в показателях более низких скоростей передачи и более низкой стабильности в сравнении с проводной LAN, WLAN обладает различными преимуществами, в том числе, возможностью организации беспроводной сети, большей мобильностью и так далее. Соответственно, рынки WLAN продолжают расти.
Вследствие необходимости больших скоростей передачи и развития технологий беспроводной передачи исходный стандарт IEEE 802.11, который определяет скорость передачи в 1-2 Мбит/с, развился в более передовые стандарты, в том числе, 802.11b, 802.11g и 802.11a. В последнее время были поддержаны соглашения для учреждения нового стандарта IEEE, 802.11g. Стандарт IEEE 802.11a, который определяет скорость передачи 6-54 Мбит/с в 5-гигагерцевом диапазоне Национальной информационной инфраструктуры (NII), использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) в качестве технологии передачи. С ростом публичной заинтересованности в OFDM-передаче и использовании 5-гигагерцевого диапазона гораздо большее внимание было уделено IEEE 802.11a, нежели другим стандартам беспроводных LAN.
В последнее время услуги беспроводной сети Интернет, использующие WLAN, так называемые 'Nespot', были запущены и предложены корпорацией Korea Telecommunication (KT) Кореи. Nespot-услуга предоставляет доступ к сети Интернет с использованием WLAN согласно IEEE 802.11b, обычно называемому Wi-Fi, символизирующему безукоризненную точность беспроводной передачи данных. Стандарты связи для систем беспроводной передачи данных, которые были завершены и опубликованы или находились на стадии исследования и обсуждения, включают в себя WCDMA (широкополосный множественный доступ с кодовым разделением каналов), IEEE 802.11x, Bluetooth, IEEE 802.15.3 и т.д., известные как стандарты связи 3G (3-его поколения). Наиболее широко известным, наиболее дешевым стандартом беспроводной передачи данных является IEEE 802.11b, модификация IEEE 802.11x. Стандарт WLAN IEEE 802.11b предусматривает передачу данных при максимальной скорости 11 Мбит/с и использует 2,4-гигагерцевый промышленный, научный и медицинский (ISM) диапазон, который может использоваться при заданной напряженности электрического поля без разрешения. С современным широко распространенным использованием IEEE 802.11a в качестве WLAN, которая обеспечивает максимальную скорость передачи данных 54 Мбит/с в 5-гигагерцевом диапазоне посредством использования OFDM, интенсивно исследуется IEEE 802.11g, разработанный как расширение для IEEE 802.11n в направлении MIMO (системы со многими входами и многими выходами).
Сеть Эзернет и WLAN, которые широко используются в настоящее время, обе используют способ множественного доступа с контролем несущей (CSMA). Способ CSMA используется для определения, находится канал в использовании или нет. Когда определено, что канал не находится в использовании, то есть когда канал незанят, тогда передаются данные. Если канал занят, передача данных предпринимается после заданного периода времени. Способ множественного доступа с контролем несущей и обнаружением конфликтов (CSMA/CD) является развитием способа CSMA, который используется в проводной LAN, тогда как способ множественного доступа с контролем несущей и исключением конфликтов (CSMA/CA) используется при пакетной беспроводной передаче данных. В способе CSMA/CD станция приостанавливает передачу сигналов, когда обнаруживается конфликт во время передачи. В отличие от способа CSMA, который предварительно проверяет, занят или нет канал, перед передачей данных, в способе CSMA/CD станция приостанавливает передачу сигналов, когда обнаружен конфликт во время передачи сигналов, и передает сигнал наличия конфликта на другую станцию, чтобы информировать о возникновении конфликта. После передачи сигнала наличия конфликта станция должна ожидать случайный период отсрочки передачи, а затем повторно начинать передачу сигналов. В способе CSMA/CA станция не передает данные немедленно после того, как канал становится незанятым, а должна ожидать случайный период отсрочки передачи после заданной продолжительности перед передачей, чтобы исключить конфликт сигналов. Если конфликт сигналов происходит во время передачи, продолжительность случайного периода отсрочки передачи увеличивается вдвое для снижения вероятности конфликта (взаимных помех).
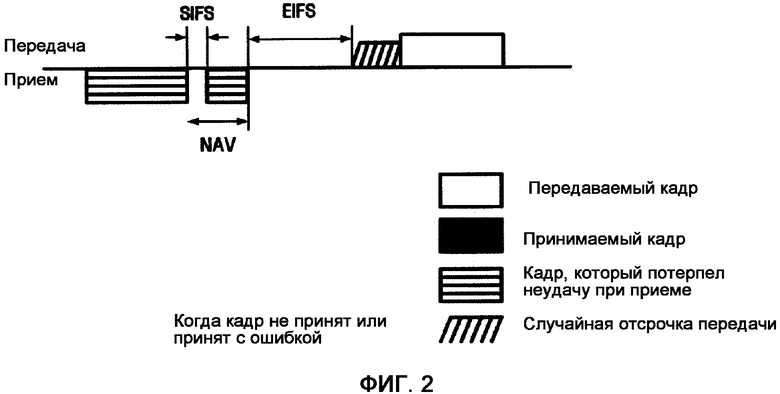
Фиг.1 и 2 иллюстрируют традиционную последовательность операций передачи и приема кадра в периоде состязания. Кадр принимается на станции при допущении, что принятый кадр был передан на другую станцию как принимающую станцию.
Сначала, со ссылкой на фиг.1, кадр, передаваемый по каналу, принимается станцией без ошибки. Станция не может передавать кадр по каналу, в то время как кадр принимается другой станцией: этот способ называется физическим контролем несущей. Заголовок протокола управления доступом к среде (MAC) принимаемого кадра содержит информацию о продолжительности. Эта информация о продолжительности содержит продолжительность времени, взятую от передачи кадра передающей станцией до приема кадра подтверждения приема (ACK) от принимающей станции. Принимающая станция принимает кадр, переданный с передающей станции, и передает кадр ACK, спустя короткую продолжительность, известную как короткий межкадровый интервал (SIFS), на передающую станцию. Станция устанавливает вектор назначения сети (NAV) с использованием информации о продолжительности. Этот способ назван виртуальным контролем несущей. Для того чтобы станции передать кадр на другую станцию, станция ожидает распределенный межкадровый интервал (DIFS) после истечения периода NAV времени, а затем выполняет случайную отсрочку передачи и, в заключение, передает кадр. Когда несущая обнаруживается в среде при выполнении случайной отсрочки передачи, тем не менее, станция приостанавливает случайную отсрочку передачи и ожидает до тех пор, пока канал не освободится. Затем, станция ожидает DIFS и выполняет случайную отсрочку передачи.
Со ссылкой на фиг.2, станция не может принимать кадр, передаваемый через канал. Станция не может использовать канал, в то время как кадр передается через канал, это называется физическим контролем несущей. Когда кадр, переданный через канал, не может быть принят вследствие возникновения ошибки, станция не может устанавливать значение NAV, так как значение NAV обеспечивается в качестве информации, загруженной в кадр. Таким образом, перед передачей кадра станция, которая не способна установить значение NAV, должна ожидать продолжительность расширенного межкадрового интервала (EIFS), который является более продолжительным, чем DUB, а затем выполнять случайную отсрочку передачи. На фиг.2, когда канал становится незанятым вследствие неудачи в передаче кадра, станция ожидает EIFS. Кадр ACK, соответствующий этому кадру, передается через канал перед EIFS, то есть сразу после SIFS. Если станция не может принять даже кадр ACK, станция должна ожидать еще один EIFS, который начинается после продолжительности кадра ACK, и, в заключение, выполняет случайную отсрочку передачи, когда канал не занят, с тем чтобы передать кадр. Другими словами, когда станция не может выполнять виртуальный контроль несущей из-за неудачи в получении значения NAV, станция вынуждена ожидать дольше, чем когда кадр принимается без ошибки. Из-за этого вероятность проигрыша станции при состязании в передаче кадра могла бы возрасти, тем самым неблагоприятно влияя на эффективность передачи данных. Возникновение такой ошибки может быть более различимым в среде связи, в которой используются различные схемы модуляции и коэффициенты кодирования, такие как в связи по протоколу IEEE 802.11a. Другими словами, когда кадры передаются на станцию при скорости, которая не поддерживается станцией, станция не интерпретирует переданный кадр, так что информация о продолжительности не может быть получена из MAC-заголовка кадра. Следовательно, виртуальный контроль несущей по кадру, переданному на скорости, недоступной для приема станцией, не может быть достигнут, в результате ухудшается качество функционирования станции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Более подробно проблема, связанная с традиционным виртуальным контролем несущей, будет описана со ссылкой на фиг.1 и 2.
В отличие от физического контроля несущей виртуальный контроль несущей (VCS) предполагает, что среда занимается на заданную продолжительность. Тогда как физический контроль несущей выполняется на основании измерения реальной беспроводной среды, виртуальный контроль несущей выполняется из условия установления заданного значения, выбранного из числа принятых/переданных данных, продолжительность занятости среды оценивается с использованием выбранного заданного значения, а передача данных в таком случае начинается после того, как истекла оцененная продолжительность. То есть в отличие от физического контроля несущей виртуальный контроль несущей не может выполняться надлежащим образом, когда данные не принимаются успешно. При нормальной операции виртуального контроля несущей, как показано на фиг.1, когда вектор назначения сети (NAV), в качестве информации, необходимой для виртуального контроля несущей, нормально принимается, возможно идентифицировать, как долго среда будет захвачена (занята), посредством считывания значения NAV. С другой стороны, когда происходит ошибка, то есть когда имеет место ошибка при считывании принятого кадра, как показано на фиг.2, значение NAV не может быть считано из кадра. Таким образом, станция вынуждена ожидать дольше, чем период NAV, например, EIFS (расширенный межкадровый интервал) согласно стандарту IEEE 801.11a.
Далее, со ссылкой на фиг.3, будут описаны причины, почему были порождены проблемы, изложенные выше.
Фиг.3 иллюстрирует традиционный контроль несущей, поддерживающий две разновидности структур контроля несущей: физического контроля несущей и виртуального контроля несущей. В отношении структуры физического контроля информация, хранимая на физическом уровне 210, имеет структуру 212. Преамбулой 214 протокола конвергенции физического уровня является сигнал синхронизации PLCP в целях заблаговременного информирования, какие данные будут передаваться на физическом уровне 210. Сигналу 216, который указан СИГНАЛОМ, предшествует PLCP-преамбула 214, и СИГНАЛ модулирован согласно основной схеме модуляции и переносит информацию, которая необходима для приема следующего поля 218 данных, которое указано ДАННЫМИ. СИГНАЛ 216 позже будет описан подробно со ссылкой на фиг. 8-10. Информация, содержащаяся в СИГНАЛЕ 216, содержит сегмент, который указан СКОРОСТЬЮ, соответствующей схеме модуляции, используемой при передаче ДАННЫХ 218. Эта информация дает возможность передачи/приема данных с использованием различных схем модуляции. Как показано на фиг.3, физический контроль несущей реализован на основании того, принимает или нет среда определенный сигнал. После приема PLCP-преамбулы 214 физический уровень 210 информирует уровень 220 управления доступом к среде передачи (MAC), что физический уровень 210 занят, посредством сигнала 222 занятости. К тому же, в момент, когда завершен прием данных, то есть когда канал становится незанятым, как указано номером 228, физический уровень 210 информирует MAC-уровень 220, что использование физического уровня 210 завершено. Однако, при физическом контроле несущей, передача данных на произвольную станцию может не допускаться другой станцией. В этом случае необходимо выполнять виртуальный контроль несущей. При виртуальном контроле несущей, значение (NAV) продолжительности в MPDU ДАННЫХ 218 считывается MAC-уровнем 220, чтобы распознать, занята ли среда на соответствующую продолжительность. Здесь, MPDU, который является аббревиатурой для модуля данных протокола уровня MAC, указывает на данные, выбранные MAC-уровнем для их передачи другому уровню MAC, подключенному к сети, однако значение NAV может считываться, только когда поле данных принято нормально. Следовательно, если принимающая станция способна только принимать поле сигнала, но не способна считывать поле данных с использованием различных схем, значение NAV, установленное в поле данных, не может быть считано.
Необходим способ связи, способный к улучшению качества функционирования станции, посредством обеспечения виртуального контроля канала с использованием кадров, переданных на различных скоростях.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
Настоящее изобретение было предложено согласно потребностям, описанным выше. Аспект настоящего изобретения состоит в том, чтобы предоставить способ виртуального контроля несущей при связи в беспроводной сети, поддерживающий различные скорости, и способ связи, использующий этот способ.
Еще один аспект настоящего изобретения предоставляет способ виртуального контроля несущей при MIMO-связи, а также способ и устройство беспроводной связи, использующие этот способ.
Согласно примерному варианту осуществления настоящего изобретения, предложен способ установления данных виртуального контроля несущей при связи в беспроводной сети, способ содержит этапы, на которых принимают кадр, переданный с использованием различных схем модуляции, и извлекают данные для виртуального контроля несущей из модулированного сегмента кадра, основанного на базовой схеме модуляции, и устанавливают виртуальный контроль несущей с использованием извлеченных данных.
Предпочтительно, при приеме кадра используемая схема модуляции содержит мультиплексирование с ортогональным частотным разделением каналов.
При приеме кадра данные для виртуального контроля несущей предпочтительно добавляют в модулированный сегмент кадра, основанный на базовой схеме модуляции, имеющей скорость передачи данных, которую поддерживают посредством любой станции, им предшествует сигнал синхронизации.
Извлечение данных предпочтительно выполняют после проверки, имеет ли место ошибка в модулированном сегменте кадра, основанном на базовой схеме модуляции.
Установление данных виртуального контроля несущей может содержать передачу данных на физический уровень.
Способ установления данных виртуального контроля несущей при связи в беспроводной сети дополнительно может содержать этапы, на которых сохраняют данные в качестве параметра вектора индикатора виртуального контроля несущей физического уровня (PHY-RXSTART.indicator) и передают его на физический уровень. Значение NAV, сохраненное в сегменте сигнала, также сохраняют в сегменте данных, который должен быть принят на следующей стадии. Другими словами, прежнее значение NAV в сегменте данных сохраняют в сегменте сигнала.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеприведенные и другие признаки и преимущества настоящего изобретения станут более очевидными при подробном описании примерных вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых:
фиг.1 и 2 иллюстрируют традиционную последовательность операций передачи и приема кадра в периоде состязания;
фиг.3 иллюстрирует примерные традиционные структуры физического контроля несущей и виртуального контроль несущей, а также соответствующие форматы кадра;
фиг.4 иллюстрирует способ передачи данных для виртуального контроля несущей согласно примерному варианту осуществления настоящего изобретения;
фиг.5-7 иллюстрируют традиционный виртуальный контроль несущей и виртуальный контроль несущей согласно примерному варианту осуществления настоящего изобретения;
фиг.8-10 иллюстрируют традиционный формат кадра PPDU (блока данных протокола PLCP), который определен протоколом IEEE 802.11a, и примерные модифицированные форматы кадра PPDU согласно настоящему изобретению;
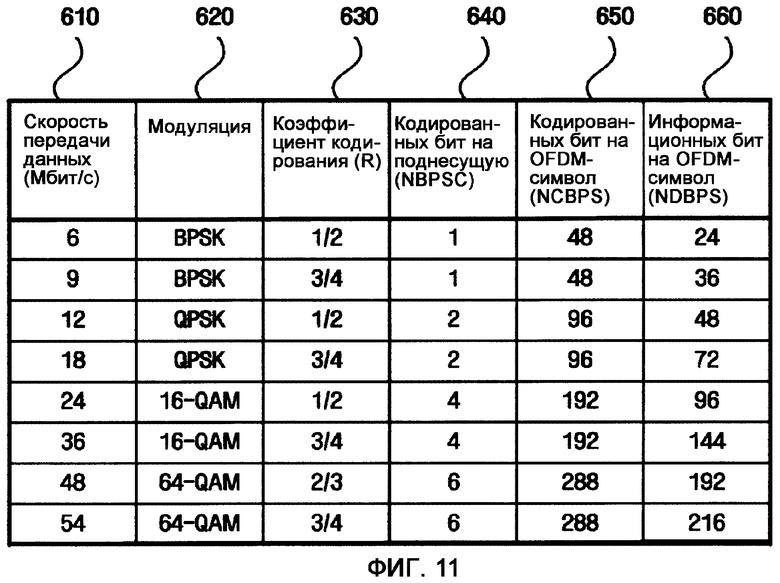
фиг.11 показывает таблицу информации касательно схем модуляции при беспроводной сетевой связи протокола IEEE 802.11a;
фиг.12 - блок-схема последовательности операций способа, иллюстрирующая процедуру виртуального контроля несущей согласно примерному варианту осуществления настоящего изобретения;
фиг.13 иллюстрирует различие между традиционной процедурой приема сигнала и процедурой приема PLCP согласно настоящему изобретению;
фиг.14 - блок-схема последовательности операций способа, иллюстрирующая процедуру передачи данных согласно примерному варианту осуществления настоящего изобретения;
фиг.15 иллюстрирует различие между традиционной процедурой передачи сигнала и процедурой передачи согласно настоящему изобретению;
фиг.16 иллюстрирует процедуру виртуального контроля несущей согласно еще одному примерному варианту осуществления настоящего изобретения; и
фиг.17 иллюстрирует структуру PPDU MIMO согласно примерному варианту осуществления настоящего изобретения.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение описано ниже в контексте модуляции мультиплексированием с ортогональным частотным разделением каналов (OFDM) посредством связи WLAN согласно протоколу IEEE 802.11a. Однако должно быть принято во внимание, что доктрины изобретения, обсужденные в материалах настоящей заявки, не являются ограниченными до такой степени, то есть изобретение применимо к любой системе беспроводной связи, использующей различные схемы модуляции.
Чтобы направить усилия на решение проблем задержки, вызванных традиционным виртуальным контролем несущей, настоящее изобретение предлагает новый способ виртуального контроля несущей, который будет описан далее со ссылкой на фиг. 4. Как описано выше, для того чтобы всем станциям устанавливать их соответственные NAV, информация 324 о продолжительности включена в сигнал, который передается согласно базовой схеме модуляции. Поэтому физический уровень 310 может передавать значение 324 NAV (продолжительности) на MAC-уровень 320. 'PHY-RXSTART.indicate', который предоставляет информацию касательно приема значения NAV с физического уровня 310 MAC-уровнем 320, может иметь векторное значение. Для этой цели предыдущие векторные значения должны быть изменены, каковое будет описано позже, со ссылкой на фиг. 13 и 15.
Как и в традиционном способе, значение NAV также может быть сохранено в поле данных. Согласно настоящему изобретению, значение NAV может передаваться независимо от скорости приема станции, даже в среде беспроводной сетевой связи, использующей различные схемы модуляции.
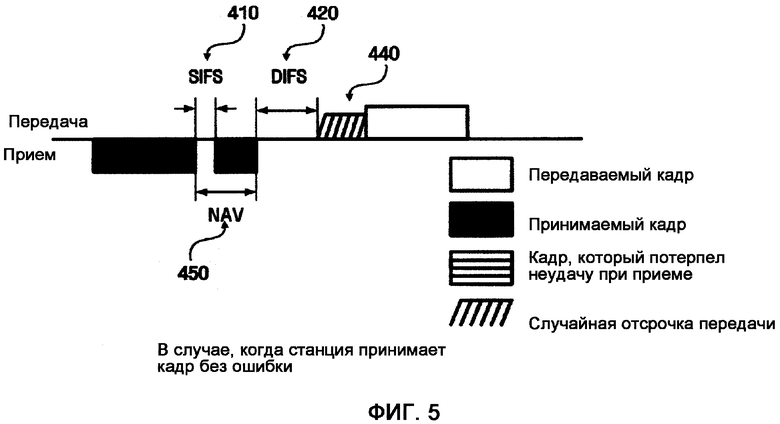
Фиг.5-7 иллюстрируют способ виртуального контроля несущей согласно примерному варианту осуществления настоящего изобретения, в котором значение NAV может считываться, даже когда продолжающийся кадр не принимается.
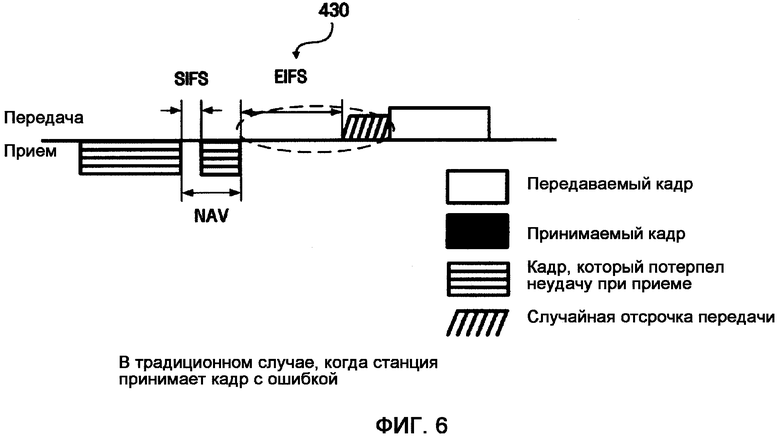
Подробно, фиг.5 иллюстрирует, что кадр принимается нормально принимающей станцией. Когда прием кадра завершен, станция может считывать значение NAV из принятого кадра, а затем станция пережидает время 450 продолжительностью NAV для виртуального контроля несущей. После истечения периода 420 расширенного межкадрового интервала (DIFS) и периода 440 случайной отсрочки передачи может передаваться следующий кадр. В некоторых случаях, где принимающая станция не поддерживает надлежащую скорость приема данных, кадр не может приниматься принимающей станцией, а значение NAV не может быть считано из кадра, как показано на фиг.6. В таком случае, принимающая станция должна пережидать период 430 расширенного межкадрового интервала (EIFS), который более длителен, чем продолжительность, соответствующая значению NAV. Затем, после истечения периода случайной отсрочки передачи, данные могут передаваться, каковое уже было описано со ссылкой на фиг.1.
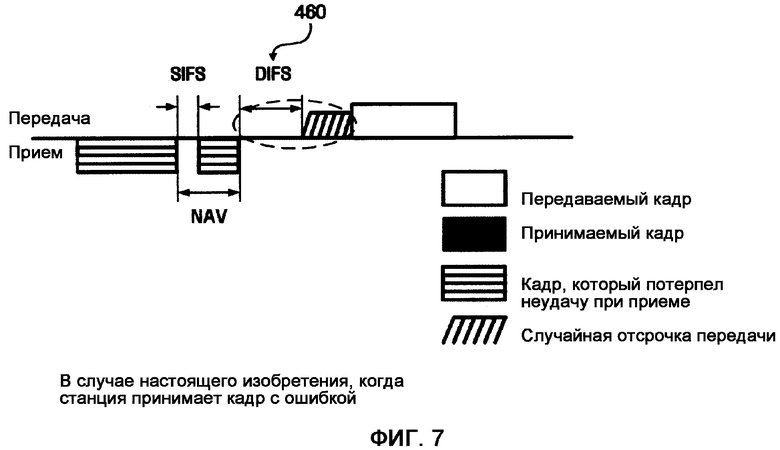
В настоящем изобретении данные, не принятые станцией, описаны со ссылкой на фиг.7. Несмотря на то, что данные не могут приниматься принимающей станцией, передача данных может выполняться после истечения периода NAV и периода 460 DIFS, как показано на фиг.7. Период NAV получается из известного значения NAV, сохраненного в сегменте сигнала. Как результат, период времени ожидания вследствие ошибки приема может быть сокращен.
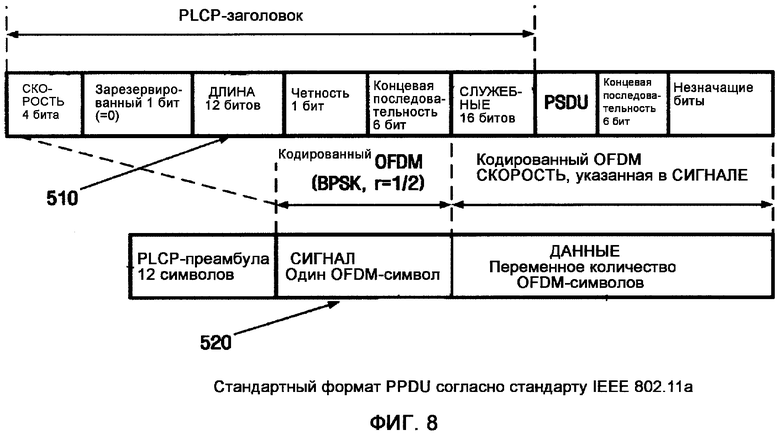
Фиг.8-10 иллюстрируют традиционный формат кадра PPDU (блока данных протокола PLCP), который определен протоколом IEEE 802.11a, и примерные модифицированные форматы PPDU для воплощения настоящего изобретения. PPDU является завершенным кадром PLCP (процедуры конвергенции физического уровня), включающим в себя PLCP-заголовок, PSDU, концевую комбинацию битов и незначащие биты, прежде всего, будет кратко описана PLCP. Относительно сложный физический (PHY) уровень требуется при использовании в нем радиоволн. Физический уровень согласно протоколу IEEE 802.11a включает в себя PLCP и систему PDM (зависимую от физической среды). PLCP, который является самым верхним слоем физического уровня в сети протокола IEEE 802.11, приводит кадр MAC-уровня в соответствие со средой. Каждый физический уровень имеет свой собственный PLCP, который поставляет вспомогательный кадр на MAC-уровень. PMD-система ответственна за передачу радиочастотного (РЧ, RF) сигнала на другую станцию для того, чтобы передать кадр MAC-уровня. PLCP-заголовок согласно иллюстративному варианту осуществления настоящего изобретения хранит базовую информацию, требуемую для взаимодействия между PHY-уровнем и MAC-уровнем.
Далее будет кратко описан традиционный формат кадра. Сигнал, показанный на фиг.8, модулируется согласно базовой схеме модуляции, то есть двухпозиционной фазовой манипуляции (BPSK) с r=1/2, и передается в виде одного OFDM-символа, который обозначен 520. Причина использования базовой схемы модуляции состоит в том, чтобы предоставить возможность любой станции считывать СИГНАЛ, так как СИГНАЛ предоставляет информацию, довольно важную для того, чтобы был принят следующий кадр. Информация, сохраненная в СИГНАЛЕ 520 (один OFDM-символ), включает в себя СКОРОСТЬ из 4 бит, то есть скорость модуляции для считывания данных, которые должны быть применены на следующей стадии, зарезервированный 1 бит, ДЛИНУ 510 из 12 бит и хвостовую комбинацию из 6 бит. Поле служебных бит, обозначенное СЛУЖЕБНЫЕ, включено в PLCP-заголовок, но переносится в комбинации с ДАННЫМИ из-за особенности основанного на BPSK OFDM-символа, то есть только 24 бита передаются OFDM-символом. Скорость передачи данных, коэффициент кодирования и биты данных для OFDM-символа, в том числе базовая схема модуляции, BPSK с R=1/2, показаны на фиг.11 в качестве указанных соответственно номерами 610, 630 и 660 ссылок. СИГНАЛ передается при наименьшей скорости кодирования 6 Мбит/с (610, показанный на фиг.11), и все из 24 битов данных для символа могут передаваться при наименьшем коэффициенте кодирования, то есть R=1/2, который предоставляет возможность всем станциям считывать СИГНАЛ. Коэффициент 630 кодирования (R) указывает на соотношение между битами, несущими информацию для проверки ошибок, и битами, несущими информацию, которая должна передаваться в действительности. Половина из всех 48 кодированных битов для OFDM-символа, т.е 24 бита, передаются в качестве реальных данных, которые указаны номером 660.
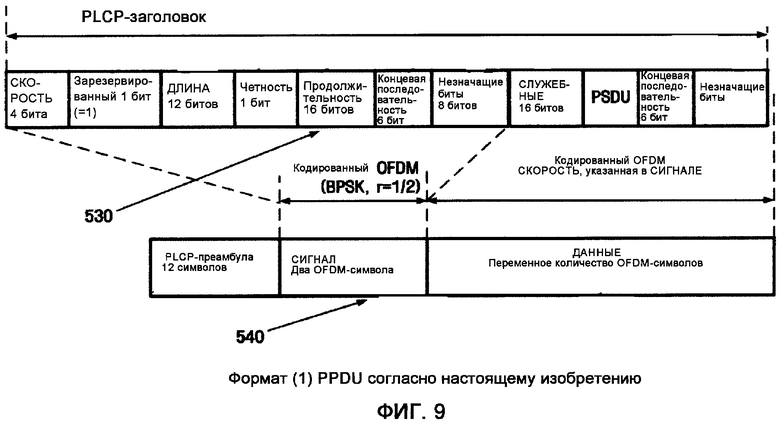
Согласно примерным форматам кадра по настоящему изобретению, как показано на фиг.9 и 10, каждое поле сигнала, которое указано СИГНАЛОМ, включает в себя два OFDM-символа, которые предназначены для хранения в них вышеописанного значения NAV. К тому же, для совместимости с традиционными протоколами, зарезервированное поле установлено в один бит для передачи. Количество битов 530, 550 продолжительности (информации о продолжительности) установлено равным значению NAV, сохраненному в ДАННЫХ. К тому же, СИГНАЛ передается в виде двух символов, указанных номерами 540 и 560, где один из двух символов предназначен для хранения информации о продолжительности. Следовательно, при использовании BPSK с R=1/2, посредством которого могут передаваться всего 24 бита на символ, всего 48 бит могут передаваться с использованием форматов кадра, показанных на фиг.9 и 10, с дополнением в 8 незначащих бит. При использовании других протоколов беспроводной связи, значение NAV может быть добавлено. Согласно условиям различных вариантов осуществления настоящего изобретения, значение NAV может быть сохранено в ДАННЫХ, которые модулированы с использованием базовой схемы модуляции, или как в ДАННЫХ, так и в СИГНАЛЕ.
Как описано выше, значение NAV может быть установлено посредством модифицирования структуры традиционного кадра PPDU. Также возможно установить значение NAV с традиционным форматом (фиг. 8) кадра PPDU стандарта IEEE802.11a. Это будет описано со ссылкой на фиг.16.
Далее будет описано установление значения NAV, т.е. информации о продолжительности, в сигнале, использующем базовую схему модуляции, на передающей и принимающей станциях.
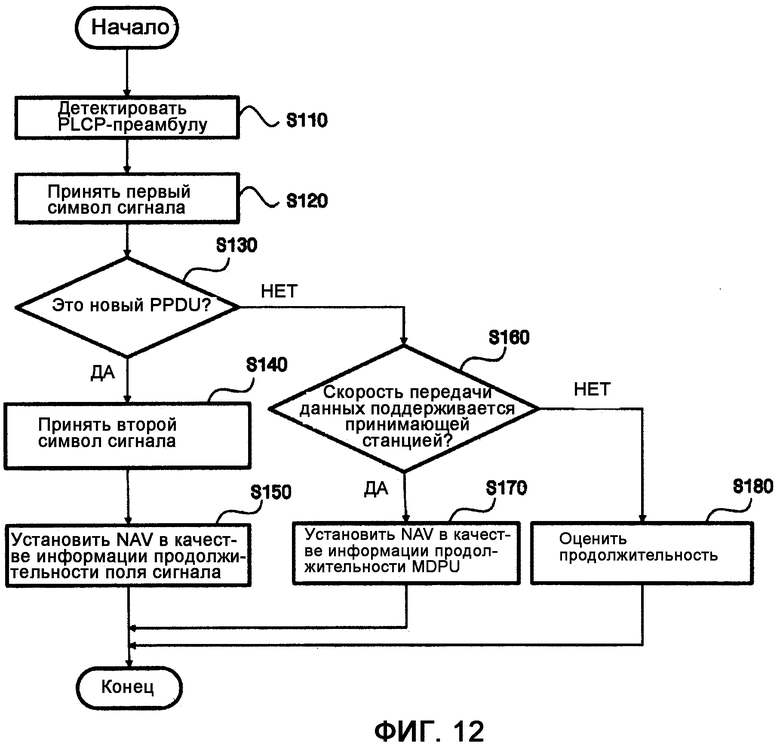
Фиг.12 - блок-схема последовательности операций способа, иллюстрирующая процедуру виртуального контроля несущей на принимающей станции. Со ссылкой на фиг.12, конкретный сигнал, т.е., PLCP-преамбула, как показано на фиг.8-10, которая является указывающей прием информации принимающей станцией через беспроводную среду, детектирован на этапе S110, а следующая базовая информация, т.е., символ первого сигнала, принимается на стороне приемника, т.е. принимающей станции, на этапе S120. В этом случае, конкретное поле зарезервированных битов базовой информации предоставлено отдельно, из условия чтобы количество зарезервированных битов символа было установлено в единицу (1), посредством которой указывается передача новых данных, а информация значения NAV извлекается из информации, переданной с использованием базовой схемы модуляции. На этапе S130 определяется, есть ли новый PPDU. Бит четности проверяется, чтобы определить, корректны ли принятые данные. Определяется, основан ли кадр, принятый через вышеприведенные последовательности операций, на новой схеме модуляции. Если определено, что кадр не основан на новой схеме модуляции, кадр определяется основанным на традиционной схеме модуляции и, в таком случае, обрабатывается согласно традиционной схеме. В этом случае, на этапе S160 определяется, поддерживается ли скорость передачи данных принимающей станцией. Если скорость передачи данных поддерживается принимающей станцией, последующие символы принимаются при скорости передачи данных, и значение NAV считывается из символов на этапе S170. Однако, если скорость передачи данных не поддерживается принимающей станцией, значение NAV не может считываться, так что продолжительность EIFS, вместо значения NAV, пережидается на этапе S180. На этапе S130, если определено, что имеет место новый PPDU, второй символ сигнала принимается на этапе S140. Затем, значение NAV, считанное из символа сигнала, устанавливается в качестве значения продолжительности поля сигнала на этапе S150. То есть независимо от пропускной способности приема принимающей станции, значение NAV может быть получено из СИГНАЛА. Соответственно приемная станция может передавать данные немедленно после продолжительности NAV, не взирая на свой поддерживаемый диапазон скоростей передачи данных по фиг. 12.
Этапы S130, S140 и S150, показанные на фиг.12, представляют примерный вариант осуществления настоящего изобретения, который определен согласно протоколу IEEE 802.11a. В этом случае, независимо от нормального приема кадра, значение NAV может считываться точно, без ошибки.
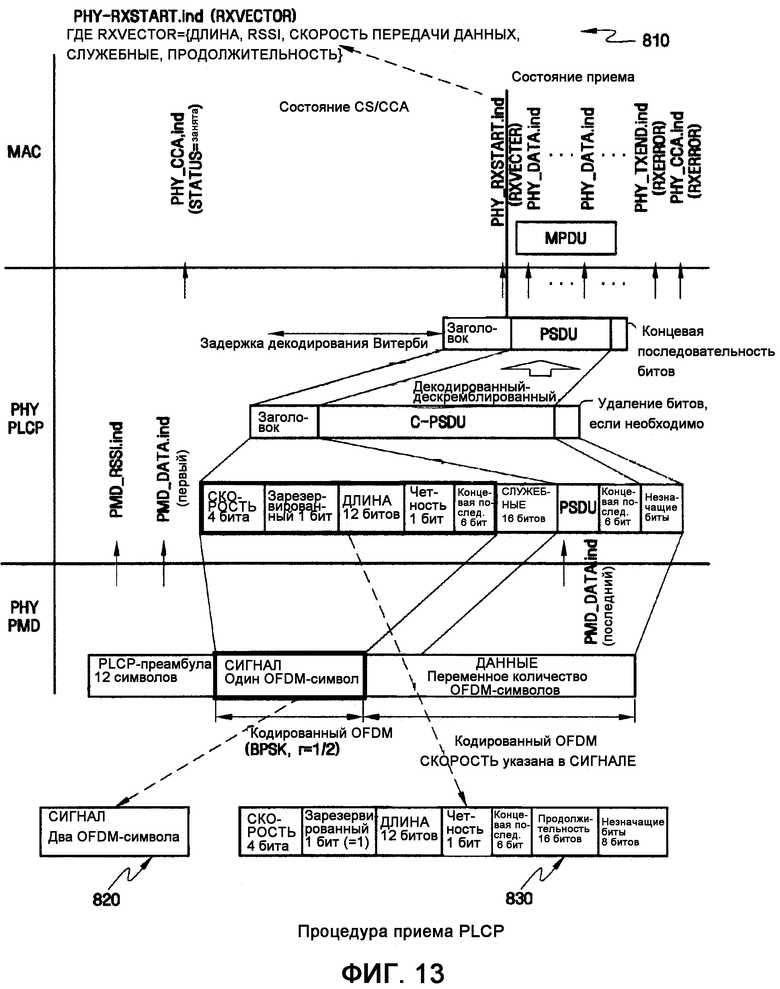
Когда выполнен виртуальный контроль несущей согласно настоящему изобретению, каждая станция ожидает передачу данных до истечения периода NAV и периода DIFS, и станция может передавать данные после канального состязания, подобного интервалу состязания, который показан на фиг.13. Фиг.13 иллюстрирует различие между традиционной процедурой приема сигнала, которая определена протоколом IEEE 802.11a, в качестве примера, и процедурой приема PLCP согласно настоящему изобретению. Подробно, в отличие от традиционной процедуры, в которой принимается сигнал из одного (1) OFDM-символа, в настоящем изобретении принимается сигнал из 2 OFDM-символов, который указан номером 820. Такой же формат СИГНАЛА 560, как показанный на фиг.10, то есть 2 OFDM-символа, также применяется к варианту настоящего изобретения, который указан номером 830 на фиг.13. Для передачи значения NAV, полученного из СИГНАЛА, на MAC-уровень с PHY-уровня, значение вектора корректируется, как указано номером 810, ссылки как изложено ниже:
PHY-RXSTART.ind (RXVECTOR),
где RXVECTOR={ДЛИНА, RSSI, СКОРОСТЬ ПЕРЕДАЧИ ДАННЫХ, СЛУЖЕБНЫЕ, ПРОДОЛЖИТЕЛЬНОСТЬ}.
Другими словами, чтобы передать значение NAV (ПРОДОЛЖИТЕЛЬНОСТЬ), полученное из символа PHY-уровня, на MAC-уровень, традиционные значения RXVECTOR (вектора приема) корректируются.
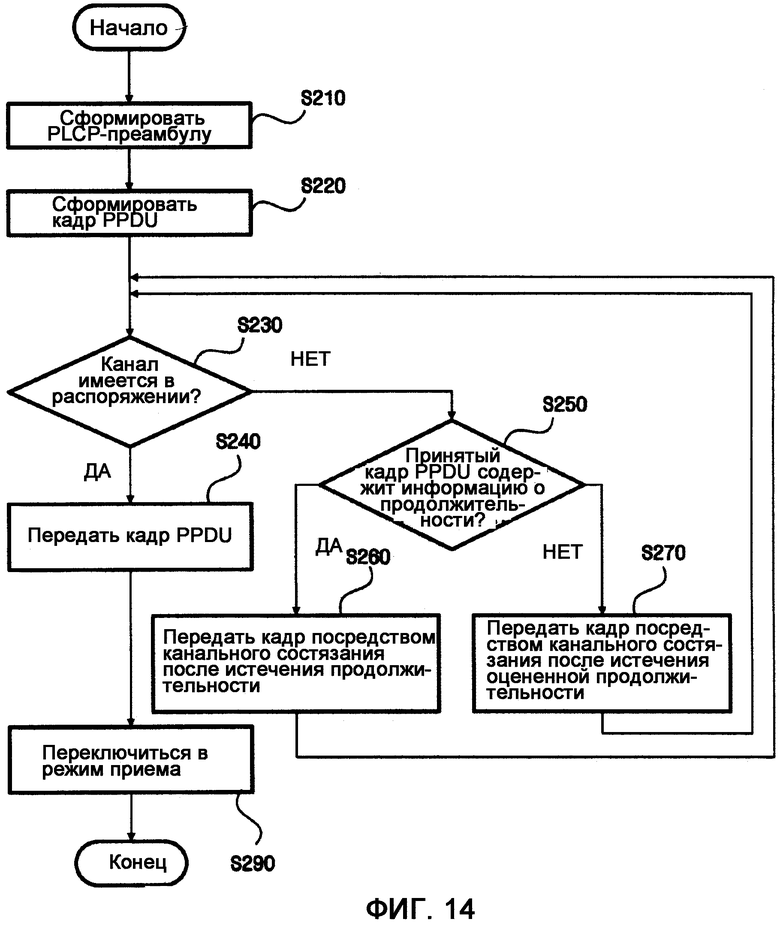
Фиг.14 показывает пример передачи кадра для конкретизации признаков нового виртуального контроля несущей, где значение NAV сохранено в поле, соответствующем PLCP-заголовку в традиционном способе передачи. PLCP-преамбула формируется на этапе S210, а кадр PPDU, включающий в себя PLCP-преамбулу, формируется на этапе S220. Для того чтобы сформировать кадр PPDU на этапе S220, необходимо установить количество зарезервированных бит в 1 и установить биты четности для проверки ошибок в данных, которые должны передаваться. На этапе S230 станция проверяет, доступен ли канал. Если определено, что канал доступен, кадр PPDU передается на этапе S240, и режим переключается в режим приема на этапе S290. Однако, если на этапе S240 определено, что канал занят, на этапе S250 определяется, включает ли в себя предварительно принятый кадр PPDU информацию о продолжительности, т.е., значение NAV. Если предварительно принятый кадр PPDU включает в себя значение NAV, кадр передается посредством канального состязания после истечения продолжительности, соответствующей значению NAV, на этапе S260. Иначе, кадр передается посредством канального состязания после истечения оцененного EIFS на этапе S270.
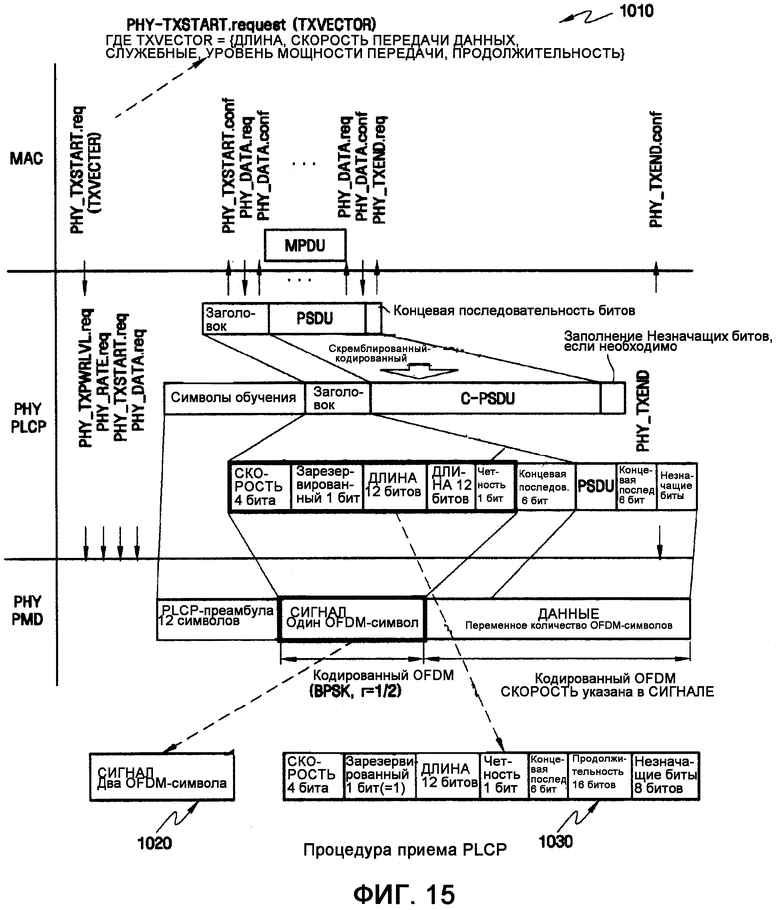
Информационный обмен между MAC-уровнем и PHY-уровнем для передачи кадра показан на фиг.15. Чтобы передать значение NAV (ПРОДОЛЖИТЕЛЬНОСТЬ), сформированное на MAC-уровне, на физический уровень, выполняется следующая правка, которая указана номером 1010;
PHY-TXSTART.request (TXVECTOR),
где TXVECTOR={ДЛИНА, RSSI, СКОРОСТЬ ПЕРЕДАЧИ ДАННЫХ, УРОВЕНЬ МОЩНОСТИ ПЕРЕДАЧИ, ПРОДОЛЖИТЕЛЬНОСТЬ}.
Переданное значение ПРОДОЛОЖИТЕЛЬНОСТИ переносится сигналом из 2 OFDM-символов 1020, как описано выше и как указано номером 1030. Такой же формат кадра СИГНАЛА 560, как показанный на фиг.10, также применяется к иллюстративному варианту осуществления.
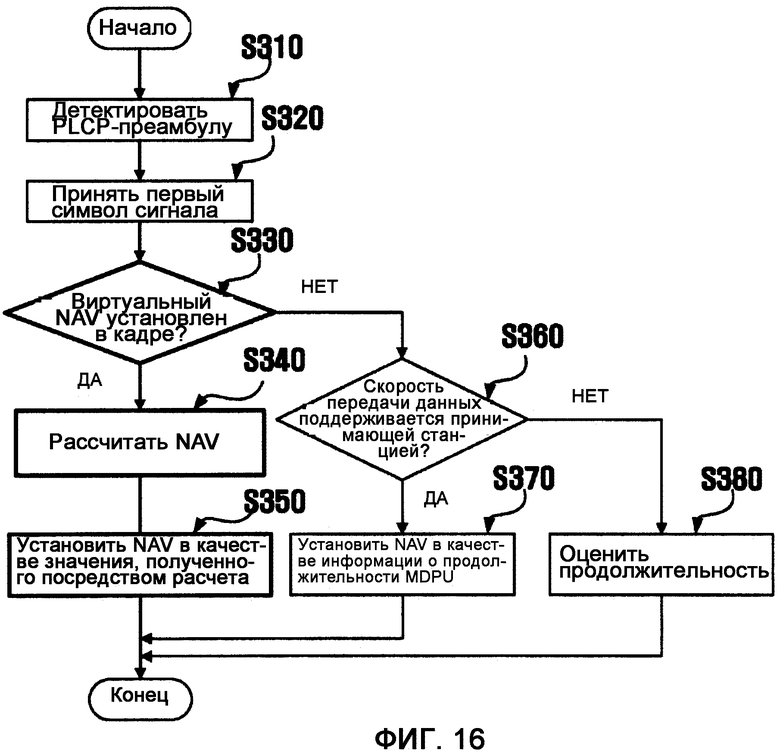
Фиг.16 иллюстрирует процедуру виртуального контроля несущей согласно еще одному примерному варианту осуществления настоящего изобретения. В этом примерном варианте осуществления, структура кадра является такой же, как структура предыдущего кадра, но первый дает возможность принимающей стации выполнять виртуальный контроль несущей с помощью информации, включенной в длину данных. Для виртуального контроля несущей принимающей станцией передающая станция записывает значение, полученное добавлением длины порции данных в кадре и интервалов между кадрами (SIFS, DIFS, и т.д.), а также длины и сигнала преамбулы в другом кадре и длины данных.
Принимающая станция детектирует PLCP-преамбулу кадра, принятого через беспроводную среду, S310. Станция, детектировавшая PLCP-преамбулу, находится в состоянии, будучи способной к приему OFDM-символов. Станция, детектировавшая PLCP-преамбулу, принимает символ сигнала из кадра, S320. Символ сигнала здесь включает в себя информацию о скорости и длине.
После приема символа сигнала принимающая станция определяет, установлено ли виртуальное значение NAV в кадре, S330. В примерном варианте осуществления настоящего изобретения, установлено ли виртуальное значение NAV в кадре, определяется на основании значения зарезервированного бита. Например, когда зарезервированный бит установлен в '0', принятый кадр указывает на предыдущий кадр, в котором виртуальное значение NAV не установлено. Когда зарезервированный бит установлен в '1', принятый кадр указывает, в какой кадр установлено виртуальное значение NAV. В другом примерном варианте осуществления, установлено ли виртуальное значение NAV в кадре, определяется по скорости передачи. Скорость передачи указывает всего на 4 бита и определена в качестве содержащей всего 8 бит по стандарту IEEE 802.11а, как проиллюстрировано на фиг.11. Передающая станция информирует принимающую станцию, установлено ли виртуальное значение NAV в кадре, используя восемь зарезервированных битов скорости.
Когда принятый кадр указывает на кадр, в который установлено виртуальное значение NAV, принимающая станция вычисляет значение NAV, S340. Значение NAV может вычисляться по скорости и длине данных. А именно, принимающая станция делит длину данных на скорость с тем, чтобы вычислить значение NAV. Принимающая станция, вычислившая значение NAV, устанавливает значение NAV в качестве значения, полученного посредством вычисления, S350.
Когда принятый кадр указывает на предыдущий кадр, принимающая станция определяет, может ли ею самой поддерживаться скорость, полученная из символа сигнала, S360. В тех случаях, когда скорость может поддерживаться принимающей станцией, принимающая станция может получать MPDU и устанавливать NAV с продолжительностью MPDU, S370. В тех случаях, когда скорость не может поддерживаться принимающей станцией, принимающая станция оценивает продолжительность, чтобы установить значение NAV в EIFS, S380. EIFS покрывает время от состояния, не имеющего в распоряжении физического контроля несущей, до кадров SIFS и ACK наименьшей скорости, а также DIFS и случайной отсрочки передачи.
Затем, со ссылкой на фиг.5, будет описан способ передающей станции, включающей информацию значения NAV в длину и скорость. Со ссылкой на эту фигуру, скорость кадра PPDU стандарта IEEE 802.11a содержит 4 бита, тем самым обозначая всего 15 скоростей. Длина содержит 12 битов, тем самым указывая всего 4096 байт при максимальном значении. В этом примерном варианте осуществления, значение NAV для виртуального контроля несущей установлено в длине. Однако указание единицы длины в байтах является только примером и, таким образом, единица длины может быть указана количеством OFDM-символов или времени и, например, микросекундой.
Например, если скорость составляет 54 Мбит/с, а данные составляют 1500 байт, длина будет вычисляться как изложено ниже. OFDM-символ передается за время в 4 микросекунды, и один OFDM-символ может передавать информацию из 216 байтов, когда скорость составляет 54 Мбит/с. С другой стороны, SIFS составляет 16 микросекунд, а кадр ACK для данных содержит преамбулу в 16 микросекунд, сигнал в 4 микросекунды, и данные (MPDU) из 16 байт (1 OFDM-символ). SIFS соответствует 4 OFDM-символам, а именно 864 байтам (216×4). Соответственно, передающая станция записывает 3660 байтов (1500+864+1296) в поле длины кадра.
Если скорость составляет 6 Мбит/с, а данные составляют 1500 байт, длина будет вычисляться, как изложено ниже. OFDM-символ соответствует 24 байтам. Таким образом 1740 байтов (1500+24×4+24×6) записываются в поле длины.
Этот виртуальный контроль несущей физического уровня также может применяться в связи беспроводной LAN, применяющей MIMO. Виртуальный контроль несущей физического уровня в WLAN, применяющей MIMO, будет описан со ссылкой на фиг.17.
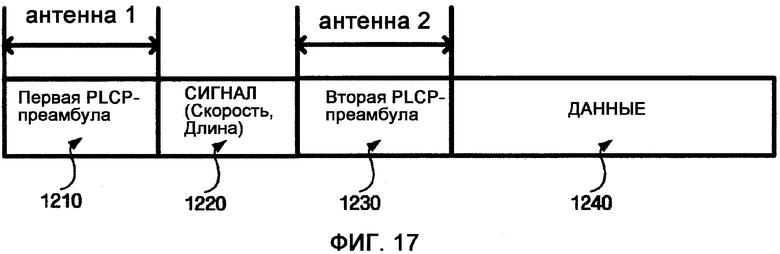
Фиг.17 иллюстрирует структуру PPDU MIMO согласно примерному варианту осуществления настоящего изобретения.
PPDU MIMO должен содержать большое количество преамбул. Примерный вариант осуществления по фиг.17 иллюстрирует структуру PPDU MIMO, использующей две антенны. В кадре MIMO этого варианта осуществления, преамбула для второй антенны размещена следующей за сигналом, с тем, чтобы предоставить станциям SISO (с одним входом и одним выходом) возможность принимать сигналы.
Кадр данных включает в себя первую PLCP-преамбулу 1210, сигнал 1220, вторую PLCP-преамбулу 1230 и данные 1240.
Передающая станция записывает значение, полученное посредством преобразования второй PLCP-преамбулы 120 в байты в длине сигнала 1220, значение, полученное преобразованием количества байтов данных 1240 и SIFS в байты, и значение, полученное преобразованием кадра ACK в байты.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Как описано выше, способ и устройство для передачи и приема информации, а также способ и устройство для установления информации при связи в беспроводной сети согласно настоящему изобретению обеспечивают следующие результаты.
Во-первых, даже когда имеет место ошибка при приеме кадров, переданных согласно разным схемам модуляции, данные виртуального контроля несущей могут быть получены, а время задержки уменьшено.
Во-вторых, даже при такой беспроводной сетевой связи без данных виртуального контроля несущей значение NAV может быть преобразовано надлежащим образом и передано, чтобы исключить конфликты и уменьшить задержку.
В-третьих, посредством использования битовых данных способы и устройства согласно настоящему изобретению могут быть сделаны совместимыми с традиционными технологиями, использующими значения NAV.
В-четвертых, информация для виртуального контроля несущей на физическом уровне может быть предоставлена без изменения структуры традиционного кадра.
Многочисленные изменения и модификации настоящего изобретения, раскрытого в материалах настоящей заявки, будут сами представляться специалистам в данной области техники. Должно быть понятно, что вышеописанные варианты осуществления предназначены только для целей иллюстрации и не должны интерпретироваться в ограничительном смысле. Следовательно, подразумевается, что прилагаемая формула изобретения скорее, чем подробное описание настоящего изобретения, охватывает любые такие модификации или варианты осуществления.
Все такие модификации, которые не выходят из сущности изобретения, подразумеваются включенными в пределы объема прилагаемой формулы изобретения. В частности, варианты осуществления настоящего изобретения, описанные выше со ссылкой на OFDM-модуляцию согласно стандарту IEEE 802.11a, представлены только ради иллюстрации и не имеют намерением ограничивать объем настоящего изобретения. Настоящее изобретение может быть применено к любой связи в беспроводной сети, использующей различные схемы модуляции.



Изобретение относится к контролю виртуальной несущей в сети связи, использующей различные скорости передачи данных. Достигаемый технический результат - улучшение качества функционирования станции. Предложены способы и устройства для установления, передачи и приема информации контроля виртуальной несущей. Способ установления контроля виртуальной несущей при связи в беспроводной сети заключается в следующем. Принимают кадр, переданный с использованием множества схем модуляции. Извлекают данные для контроля виртуальной несущей из модулированного сегмента кадра, основанного на базовой схеме модуляции. Устанавливают контроль виртуальной несущей с использованием извлеченных данных. 3 н. и 21 з.п. ф-лы, 17 ил.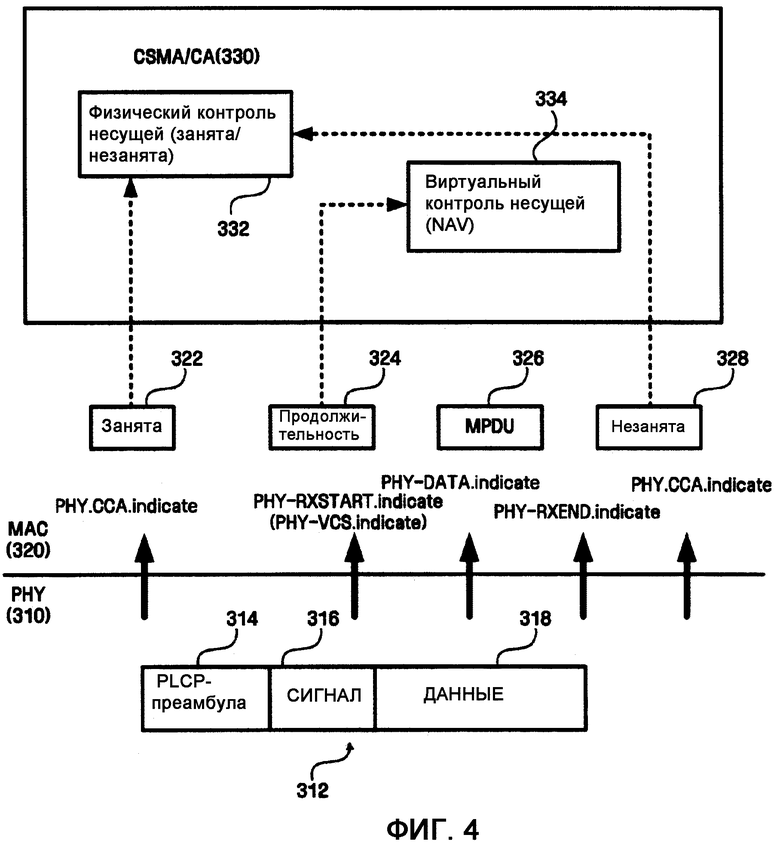
беспроводной сети, заключающийся в том, что:
принимают кадр, переданный с использованием множества схем модуляции; и
извлекают данные для контроля виртуальной несущей из модулированного сегмента кадра, основанного на базовой схеме модуляции; и
устанавливают контроль виртуальной несущей с использованием извлеченных данных.
добавляют данные контроля виртуальной несущей в модулированный сегмент кадра, основанный на базовой схеме модуляции; и
передают упомянутый модулированный сегмент.
блок приема кадра, который принимает кадр, переданный с использованием множества схем модуляции, и извлекает данные контроля виртуальной несущей из модулированного сегмента, модулированного согласно базовой схеме модуляции кадра;
блок формирования кадра, который добавляет данные контроля виртуальной несущей в кадр; и
блок передачи, который передает кадр с данными контроля виртуальной несущей, добавленными к нему.
Приоритет по пунктам:
| US 6169742 В1, 02.01.2002 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ СТЕПЕНИ ИСПОЛЬЗОВАНИЯ ТЕЛЕКОММУНИКАЦИОННЫХ КАНАЛОВ В ЛОКАЛЬНО СКОНЦЕНТРИРОВАННЫХ, АСИНХРОННЫХ, БЕСПРОВОДНЫХ ТЕЛЕКОММУНИКАЦИОННЫХ СИСТЕМАХ | 1997 |
|
RU2192096C2 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ СВЯЗИ ПО ИЗМЕНЯЮЩЕМУСЯ ВО ВРЕМЕНИ КАНАЛУ СВЯЗИ, ПЕРЕДАЮЩЕЕ УСТРОЙСТВО, ПРИЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2158479C2 |

