Изобретение относится к области военной техники и может быть использовано в конструкциях боевых машин автобронетанковой, авиационной и морской техники.
Наиболее близким механизмом дистанционного перезаряжания того же назначения является механизм перезарядки автоматического гранатомета (патент РФ №2195616 от 31.01.01 г, кл. F41A 7/08).
Механизм перезарядки автоматического гранатомета, выполненный в виде полиспастного механизма с рукояткой ручного взведения, состоящий из крышки ствольной коробки с направляющими для перемещения обоймы и выемки для фиксатора обоймы, спереди - два упора для крепления крышки на ствольной коробке, на задней стенке - два отверстия для троса, а также из троса, рукоятки и обоймы, имеющей зацеп для отведения затвора назад, ролика и фиксатора, также снабженный элементом троса для взаимодействия с механизмом дистанционного перезаряжания и рычагом, взаимодействующим с датчиком (микровыключателем), который сообщает механизму дистанционного перезаряжания о приходе затвора в крайнее заднее положение.
Недостатком данной конструкции является возможность деформации рычага микровыключателя в процессе эксплуатации. Деформация рычага микровыключателя может привести к разрыву механической цепи подачи сигнала через обойму, рычаг и микровыключатель к приводу механизма дистанционного перезаряжания.
Задачей изобретения является исключение возможности разрыва механической цепи подачи сигнала через обойму, рычаг и микровыключатель к приводу механизма дистанционного перезаряжания путем передачи функции подачи этого сигнала к датчику счетчика выстрелов автоматического гранатомета.
Поставленная задача решается тем, что механизм перезарядки автоматического гранатомета, выполненный в виде полиспастного механизма, содержащий рукоятку ручного перезаряжания и механизм дистанционного перезаряжания, обойму с зацепом, роликом и фиксатором для отведения затвора назад, связанную посредством троса с рукояткой ручного перезаряжания и с элементом троса, предназначенным для взаимодействия с механизмом дистанционного перезаряжания, направляющие на крышке ствольной коробки для перемещения обоймы, выемку для фиксатора обоймы, два упора для крепления крышки на ствольной коробке, муфту с двумя отверстиями для троса, дополнительно снабжен счетчиком выстрелов, датчик которого выполнен с возможностью взаимодействия с ударником при его движении вперед и передачи электрического сигнала на привод механизма дистанционного перезаряжания.
При этом в механизме перезарядки цепь для передачи электрического сигнала может быть образована тросом перезарядки, обоймой, направляющими на крышке ствольной коробки, затвором, ствольной коробкой с направляющими, копиром, разобщителем и ударником, а сам он может быть снабжен регулятором длины троса, выполненным в виде винта и гайки.
Данное техническое решение исключает возможность разрыва механической цепи подачи сигнала, а также аннулирует дополнительные элементы: рычаг и микровыключатель с их крепежом, обеспечивая подачу надежного сигнала к приводу механизма дистанционного перезаряжания.
Сопоставительный анализ с прототипом и другими техническими решениями показывает, что заявленный механизм перезарядки автоматического гранатомета, выполненный в виде полиспастного механизма, снабжен датчиком счетчика выстрелов, который передает электрический сигнал об отключении приводу механизма дистанционного перезаряжания путем взаимодействия элемента троса через трос перезарядки, обойму, движущуюся по направляющей крышки ствольной коробки, затвор, ствольную коробку с направляющими, разобщитель и ударник на датчик счетчика выстрелов, а также левым копиром ствольной коробки, разобщающим ударник и затвор.
Таким образом, заявленный механизм перезарядки автоматического гранатомета соответствует критерию «новизна».
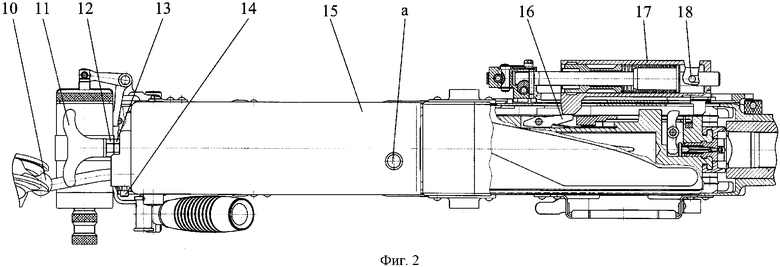
Заявляемое техническое решение иллюстрируется чертежами, где Фиг.1 - общий вид сборочного чертежа автоматического гранатомета с механизмом перезарядки, а Фиг.2 - вид сверху автоматического гранатомета с механизмом перезарядки.
Механизм перезарядки состоит из крышки 15, размещенной на ствольной коробке 9, и имеет направляющую 4 для перемещения обоймы 6, выемку «а» для фиксатора обоймы, спереди - два упора для крепления крышки на ствольной коробке, два отверстия под трос на задней стенке, муфту 3 с подпружиненным фиксатором 14, в одном из отверстий которой установлен шарик (элемент троса) 10, а на другом конце установлена рукоятка 11 ручного перезаряжания, винт 12 и гайку 13 для регулировки длины троса, обойму 6, взаимодействующую с затвором 7, перемещающимся по направлению в ствольной коробке 9, через разобщитель 16 на ударник 17 и датчик счетчика выстрелов 18, а также левый копир 8 ствольной коробки 9.
Перезарядку автоматического гранатомета можно произвести двумя способами: автоматическим - с помощью захвата механизмом дистанционного перезаряжания элемента 1 троса 5, и ручным - взведением рукой за рукоятку перезаряжания 11.
При автоматическом перезаряжании механизм дистанционного перезаряжания 1 действует через шарик 10 и трос 5 на обойму 6, которая, двигаясь по пазам направляющей 4 крышки ствольной коробки 15, перемещает затвор 7 в крайнее заднее положение. Затем механизм автоматического перезаряжания 1 освобождает шарик 10 троса 5 и затвор 7, под действием возвратных пружин, двигаясь по направляющим ствольной коробки 9 в переднее положение, перемещает в переднее положение обойму 6 с тросом 5, разобщитель 16 подхватывает ударник 17 и взводит его. При этом ударник 17, двигаясь вперед, взаимодействует с датчиком счетчика выстрелов 18, который подает сигнал об отключении приводу механизма дистанционного перезаряжания 1. При приходе затвора 7 в переднее положение разобщитель 16, взаимодействуя с левым копиром 8, выйдет из зацепления с ударником 17, а шарик 10 троса 5 займет начальное положение на конце трубки 2.
Механизм перезарядки автоматического гранатомета готов к повторному циклу.
Применение предлагаемого механизма дистанционного перезаряжания позволяет автоматизировать процесс перезарядки и повышает надежность работы.
Опытные образцы автоматического гранатомета с механизмом перезарядки прошли предварительные испытания в составе БМПТ, подтвердившие эффективность работы рассматриваемой конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2195616C1 |
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ СТРЕЛКОВОГО ОРУЖИЯ | 2013 |
|
RU2542680C1 |
| АВТОМАТИЧЕСКИЙ ГРАНАТОМЕТ | 2009 |
|
RU2426052C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2202085C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ВЗВЕДЕНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1993 |
|
RU2102675C1 |
| МЕХАНИЗМ ПОЛУСВОБОДНОГО ЗАТВОРА АВТОМАТИЧЕСКОГО ОРУЖИЯ | 2008 |
|
RU2382311C1 |
| МЕХАНИЗМ РУЧНОЙ ПЕРЕЗАРЯДКИ ГРАНАТОМЕТА | 2009 |
|
RU2426967C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЁТА | 2003 |
|
RU2247915C1 |
| САМОЗАРЯДНОЕ СТРЕЛКОВОЕ ОРУЖИЕ | 2002 |
|
RU2212614C1 |
| ПИСТОЛЕТ-ПУЛЕМЕТ | 1997 |
|
RU2125221C1 |
Изобретение относится к ручным гранатометам, в частности к конструкциям механизма их перезарядки. Механизм перезарядки автоматического гранатомета выполнен в виде полиспастного механизма и содержит механизмы ручного и дистанционного перезаряжания. Механизм перезаряжания содержит также обойму с зацепом, роликом и фиксатором, связанную посредством троса с рукояткой ручного перезаряжания и с элементом троса. Последний предназначен для взаимодействия с механизмом дистанционного перезаряжания. Механизм дополнительно снабжен счетчиком выстрелов, датчик которого выполнен с возможностью взаимодействия с ударником при его движении вперед и передачи электрического сигнала на привод механизма дистанционного перезаряжания. Механизм обеспечивает исключение возможности разрыва механической цепи подачи сигнала на привод механизма дистанционного перезаряжания. 2 з.п. ф-лы, 2 ил.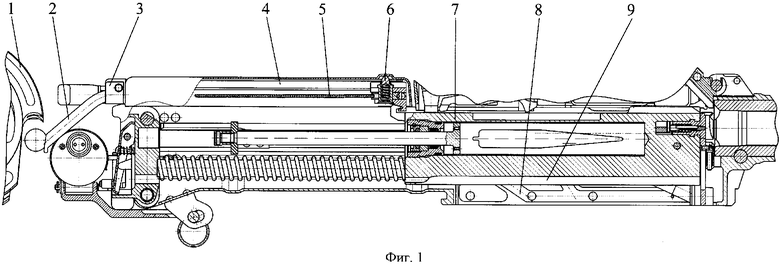
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2195616C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ВЗВЕДЕНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1993 |
|
RU2102675C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ПОВЫШЕННОЙ АДАПТАЦИЕЙ К МАНЕВРУ НОСИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2598001C2 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2202085C1 |
| Устройство для кассетирования деталей | 1985 |
|
SU1296359A1 |

