Изобретение относится к области военной техники и может быть использовано в конструкциях военных машин, в т.ч. танков, транспортеров, БМП и др.
Механизм дистанционного взведения и перезарядки (Боевая машина пехоты. Техническое описание и инструкция по эксплуатации 765-сб8 ТО, 1986. стр. 54 рис. 2, позволяет выполнить работы с АГС-17 с места оператора без выхода из объекта. Недостатком механизма является относительно большое усилие (до 60 кгс) и ход (430 мм), создающие неудобства в работе оператора и увеличивающие, в силу этого, время выполнения операции ручной перезарядки гранатомета (до 10 сек). Этот механизм наиболее близок по технической сущности к заявленному техническому решению и выбран в качестве прототипа.
Целью изобретения является повышение быстродействия и удобства применения механизма дистанционного взведения автоматического гранатомета. Поставленная цель достигается тем, что механизм дистанционного взведения снабжен пневмоцилиндром, шток которого связан посредством регулируемого подпружиненного фиксатора с ползуном, обводной ролик которого установлен с возможностью взаимодействия с тросом, а выступы ползуна установлены в пазах направляющей трубы, закрепленной соосно с пневмоцилиндром на его фланце.
Такое исполнение конструкции механизма дистанционного взведения автоматического гранатомета позволяет повысить быстродействие и удобство работы. Это достигается высоким быстродействием механизма дистанционного взведения и удобством его управления (рациональная организация эргономического моторного поля.).
Сопоставительный анализ с прототипом показывает, что заявленная установка автоматического гранатомета на бронеобъекте отличается тем, что механизм дистанционного взведения снабжен пневмоцилиндром, шток которого связан посредством регулируемого подпружиненного фиксатора с ползуном, обводной ролик которого взаимодействует с тросовым удлинителем механизма дистанционного взведения, а выступы установлены в пазах направляющей трубы, закрепленной соосно с пневмоцилиндром на его фланце. Таким образом, заявленное техническое решение соответствует критерию "новизна".
Сравнение заявленного решения с другими аналогами не позволило выявить в них признаки, отличающие заявленное техническое решение от прототипа и дающие указанный выше технический результат.
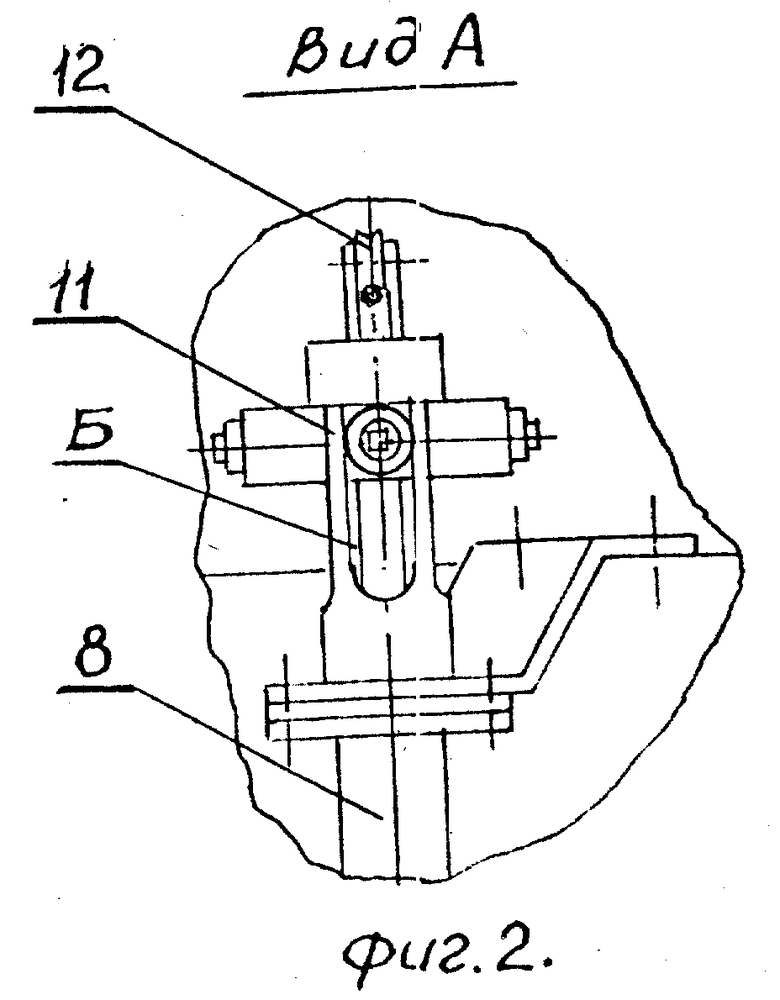
На фиг. 1 показана конструктивная схема заявленного устройства, на фиг. 2 вид по стрелке на направляющую трубу механизма.
Автоматический гранатомет 1 закреплен посредством поворотной опоры 2 на крыше броневой башни 3. Тросовый удлинитель 4 связывает подпружиненный затвор 5 с рукояткой дистанционного ручного взведения 6. Шток 7 пневмоцилиндра 8 соединен посредством шарикового фиксатора 9 с ползуном 10, выступы которого размещены в пазах Б направляющей трубы 11, закрепленной жестко на фланце пневмоцилиндра 8. Ролик 12 закреплен на ползуне 10, а ролики 13 закреплены на кронштейне 14, установленном неподвижно на крыше башни 3. пневмобаллон 15, манометр давления 16, электропневмоклапаны 17 и 2-позиционный электропереключатель 18 входят в состав системы дистанционного управления.
Для дистанционной перезарядки гранатомета 1 установленного снаружи на крыше башни 3 заключается переключатель 18. Сжатый воздух из баллона 15 через электропневмоклапан 17 подается в штоковую полость пневмоцилиндра 8. Поршень перемещается вниз совместно с ползуном 10, закрепленным на конце штока посредством шарикового фиксатора 9, отрегулированного посредством поджатия пружины на определенное усилие разблокировки. Обводной ролик 12, закрепленный на ползуне 10, воздействует на тросовый удлинитель 4, вытягивая его из крышки ствольной коробки гранатомета 1, при этом затвор 5 перемещается вправо (см. рис. 1), сжимая боевые пружины. Рукоятка ручного взведения (дублер) 6 в этом случае находится на упоре кронштейна 14. Перемещение штока 7 с ползуном 10 будет происходить до посадки затвора 5 на жесткий упор ствольной коробки гранатомета 1. В момент остановки затвора 5 на жестком упоре происходит срабатывание шарикового фиксатора 9, что приводит к разблокировке штока 7 и ползуна 10. Затвор 5 под действием боевых пружин резко перемещается влево, увлекая за собой троссовый удлинитель 4, который через обводной ролик 12 перемещает освобожденный ползун 10 вверх по пазам направляющей трубы 11 до жесткого упора. Таким образом, осуществляется операция дистанционной перезарядки гранатомета 1. Для приведения привода перезарядки в исходное положение необходимо переключить тумблер 18 на левый контакт. В этом случае сжатый воздух из штоковой полости цилиндра 8 через электропневмоклапан 17 уходит в атмосферу, а через второй электропневмоклапан 17 подается в поршневую полость цилиндра 8, вызывая перемещение поршня вверх до момента блокировки штока 7 посредством фиксатора 9 с ползуном 10. После этого переключатель 18 устанавливается в нейтральное положение, а сжатый воздух из поршневой полости цилиндра 8 через электропневмоклапан 17 уходит в атмосферу. Дистанционный привод готов к повторному циклу срабатывания.
Применение предлагаемого механизма дистанционного взведения автоматического гранатомета позволяет повысить: быстродействие устройства (с 10 сек до 2 сек уменьшить время перезарядки), удобство работы (путем исключения трудоемкой операции ручной перезарядки).
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2202085C1 |
| ДИСТАНЦИОННЫЙ ПРИВОД ПОВТОРНОГО ВЗВЕДЕНИЯ УДАРНИКА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2024 |
|
RU2839180C1 |
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ СТРЕЛКОВОГО ОРУЖИЯ | 2013 |
|
RU2542680C1 |
| УСТАНОВКА АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1993 |
|
RU2102676C1 |
| МАГАЗИН АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1993 |
|
RU2102677C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЁТА | 2003 |
|
RU2247915C1 |
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2006 |
|
RU2335727C2 |
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2195616C1 |
| МЕХАНИЗМ ВЗВЕДЕНИЯ ОРУЖИЯ | 2020 |
|
RU2742845C1 |
| МАГАЗИН АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1992 |
|
RU2056611C1 |
Сущность: механизм дистанционного взведения автоматического гранатомета снабжен пневмоцилиндром, шток которого связан посредством регулируемого подпружиненного фиксатора с ползуном. Ползун имеет выступы, установленные в пазах направляющей трубы, закрепленной соосно с пневмоцилиндром на его фланце, и через обводной ролик взаимодействует с тросом механизма дистанционного взведения. 2 ил.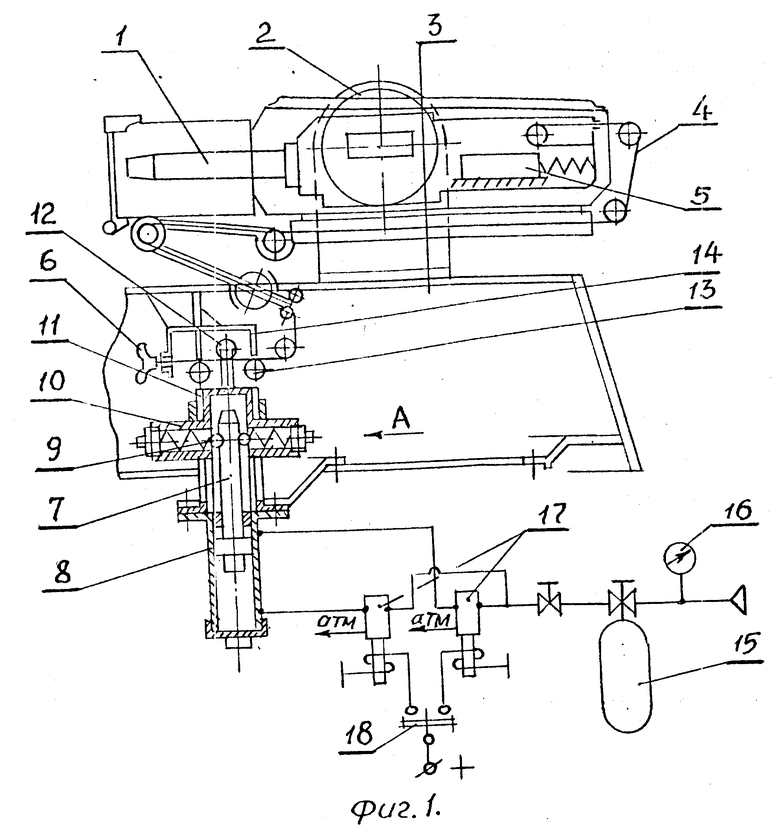
Механизм дистанционного взведения автоматического гранатомета, выполненный в виде тросового привода с рукояткой ручного взведения, отличающийся тем, что он снабжен пневмоцилиндром, шток которого связан посредством регулируемого подпружиненного фиксатора с ползуном, обводной ролик которого установлен с возможностью взаимодействия с тросом механизма дистанционного взведения, а выступы ползуна установлены в пазах направляющей трубы, закрепленной соосно с пневмоцилиндром на его фланце.
| Приспособление для сбрасывания тресты с мяльной машины | 1924 |
|
SU765A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
