Настоящее изобретение относится к преобразователям энергии, а конкретно к способу преобразования энергии электрического сигнала в механическую работу перемещения поршня гидравлического исполнительного механизма и устройству для его осуществления, и может быть использовано в различных механизмах, автомобилях, мотоциклах, бульдозерах, сельхозтехнике, различных агрегатах и т.д.
Известны способы преобразования электрической энергии в энергию магнитного или электрического поля или в тепловую энергию, а затем в механическую работу и устройства для их осуществления - исполнительные механизмы («Автомобильный справочник BOSCH», изд. «За рулем», Москва, 2002, стр.122). Принцип получения воздействующей силы, определяемый этими формами энергии, основан на использовании силовых полей или некоторых специфических характеристиках материалов.
Известными примерами электромагнитных исполнительных механизмов, использующих способ преобразования электрической энергии в механическую работу являются широко распространенные электродвигатели, а также втягивающие и поворотные соленоиды (электромагниты). В них используется следующая последовательность преобразования форм энергии: электрическая - магнитная - механическая.
Также известны пьезоэлектрические и магнитостриктивные исполнительные механизмы, использующие способ непосредственного преобразования электрической энергии в механическую работу за счет специфических свойств некоторых материалов. Последовательность преобразования форм энергии: электрическая - механическая.
Наиболее близким по совокупности существенных признаков к предлагаемому изобретению является пьезоэлектрический исполнительный механизм, использующий способ непосредственного преобразования электрической энергии в механическую работу, выбранный мной в качестве прототипа.
Существенным недостатком существующих конструкций пьезоэлектрических исполнительных механизмов является то, что они обладают очень ограниченным рабочим ходом (в данном случае рабочим ходом является отношение хода к длине той части привода, где вырабатывается энергия) и поэтому пригодны лишь для устройств, работающих в диапазоне микроперемещений.
В основу настоящего изобретения положена задача создания эффективного способа и устройства преобразования электрической энергии в механическую работу исполнительного механизма (И.М.), пригодных для работы в диапазоне нормальных (сантиметровых) перемещений рабочего органа с достаточно высокой скоростью его движения, малым временем реакции на управляющее воздействие и возможностью точного позиционирования, способных при этом создавать значительные рабочие усилия.
Для достижения указанных качеств были объединены в одно устройство, использующее новый способ преобразования энергии и названное мною электропьезогидравлическим исполнительным механизмом, достоинства пьезоэлектрического и гидравлического И.М. Электропьезогидравлический И.М. использует следующую последовательность преобразования форм энергии: электрическая - механическая - гидравлическая - механическая.
Техническим результатом предлагаемого изобретения является решение поставленной выше задачи преобразования электрической энергии в механическую работу, создан новый тип исполнительного механизма, выполненный в виде законченного технического узла, обладающий высокими техническими характеристиками, малой массой, минимальным количеством подвижных деталей, способный создавать значительные рабочие усилия при этом с предельно упрощенной схемой и алгоритмом управления, так как питающая И.М. электрическая энергия, необходимая для создания рабочего усилия, является одновременно сигналом, управляющим работой механизма.
Все это позволит достичь нового, более высокого, уровня развития технических устройств, в которых применяются исполнительные механизмы, повысить их качественные характеристики и при этом упростить систему управления ими.
Поставленная задача решается тем, что в способе преобразования энергии управляющего электрического сигнала в механическую работу перемещения поршня гидравлического исполнительного механизма, в котором исполнительный механизм содержит гидравлический цилиндр с размещенным внутри него подвижным поршнем, согласно изобретению давление жидкости, действующей на поршень, создается под воздействием усилия, по меньшей мере, одного пьезоэлектрического элемента.
Потоки жидкости в гидравлическом цилиндре исполнительного механизма формируются посредством, по меньшей мере, одного клапана, а управляются посредством, по меньшей мере, одного клапана с дистанционным управлением.
Для управления работой пьезоэлектрического элемента и соответственно работой всего И.М. задают частоту управляющего электрического сигнала в пределах диапазона от 0 до 300000000 Гц, а также, при необходимости, осуществляют регулирование частоты управляющего электрического сигнала, модуляцию управляющего электрического сигнала и регулируют скважность импульсов управляющего электрического сигнала. Для обеспечения нормальной работы И.М. используют управляющий электрический сигнал напряжением не менее 0,1 Вольт и, при необходимости, осуществляют регулирование напряжения управляющего электрического сигнала. В качестве рабочей жидкости, и в зависимости от необходимых условий, используют малокавитирующую и (или) маловязкую жидкость, и (или) обладающую температурой кипения выше 100°С. Для контроля за работой электропьезогидравлического И.М. осуществляют измерение давления жидкости в гидравлическом цилиндре, при этом осуществляют измерение давления жидкости в гидравлическом цилиндре косвенным путем, посредством измерения изменений нарастания (убывания) напряжения и (или) тока на электродах пьезоэлектрического элемента в зависимости от изменения давления на его поверхность.
Поставленная задача решается также тем, что устройстве для преобразования энергии управляющего электрического сигнала в механическую работу перемещения поршня гидравлического исполнительного механизма - электропьезогидравлическом исполнительном механизме, состоящем из гидравлического цилиндра с размещенным внутри него подвижным поршнем и пьезоэлектрического элемента, согласно изобретению пьезоэлектрический элемент установлен в корпусе гидравлического цилиндра и отделен от поршня неподвижной перегородкой, при этом механизм содержит, по меньшей мере, один клапан, с помощью которого формируются потоки жидкости и, по меньшей мере, один клапан с дистанционным управлением, с помощью которого происходит управление потоками. Пьезоэлектрический элемент И.М. содержит один подвижный электрод и один неподвижный электрод, а расстояние между электродами (в поперечном сечении) составляет, по меньшей мере, 0,0001 м.
Электропьезогидравлический исполнительный механизм содержит в своем составе компенсационную полость, которая используется для компенсации изменения объема жидкости, промежуточную полость, используемую для хранения необходимого запаса рабочей жидкости, рабочую полость, в которой происходит передача энергии давления жидкости рабочему органу - поршню И.М., нагнетательную полость, в которой происходит передача энергии от пьезоэлектрического элемента рабочей жидкости, при этом, по меньшей мере, одна из сторон этой полости выполнена в форме вогнутой поверхности. Поршень И.М. выполнен полым, а диаметры поршня и пьезоэлектрического элемента могут быть не одинаковы. Также электропьезогидравлический исполнительный механизм содержит датчик измерения давления, который используется для измерения усилия, развиваемого пьезоэлектрическим элементом, и соответственно И.М. в целом, в качестве датчика используется сам пьезоэлектрический элемент.
В дальнейшем предлагаемое изобретение поясняется конкретным примером его выполнения и прилагаемыми чертежами, на которых:
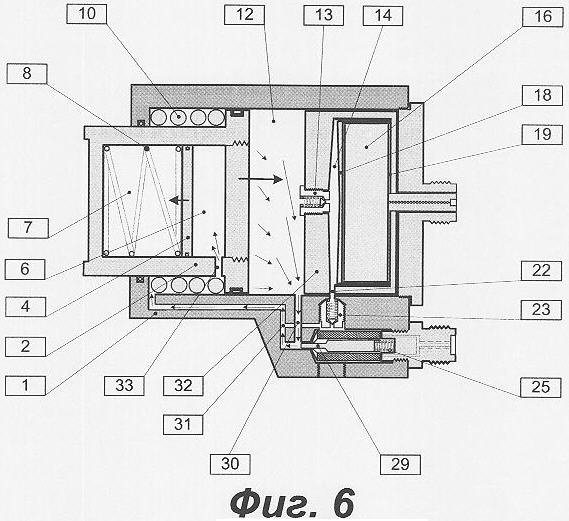
фиг.1 - изображает общий вид электропьезогидравлического исполнительного механизма;
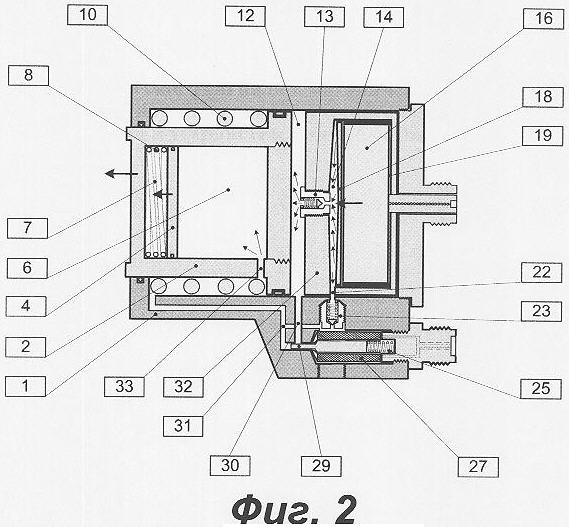
фиг.2 - изображает положение деталей и потоки жидкости электропьезогидравлического исполнительного механизма в начале рабочего такта пьезоэлектрического элемента;
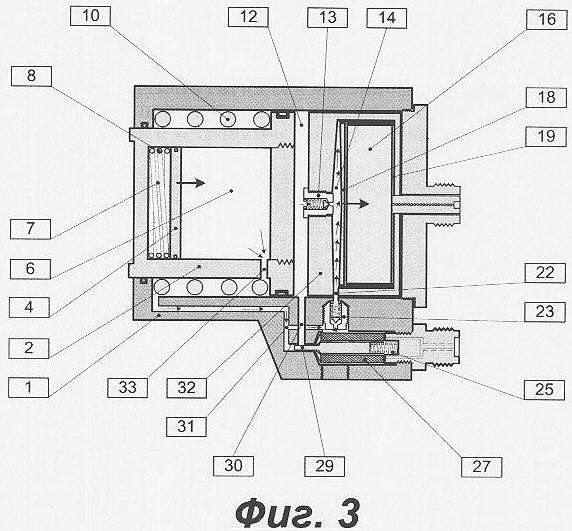
фиг.3 - изображает положение деталей и потоки жидкости электропьезогидравлического исполнительного механизма в конце рабочего такта пьезоэлектрического элемента;
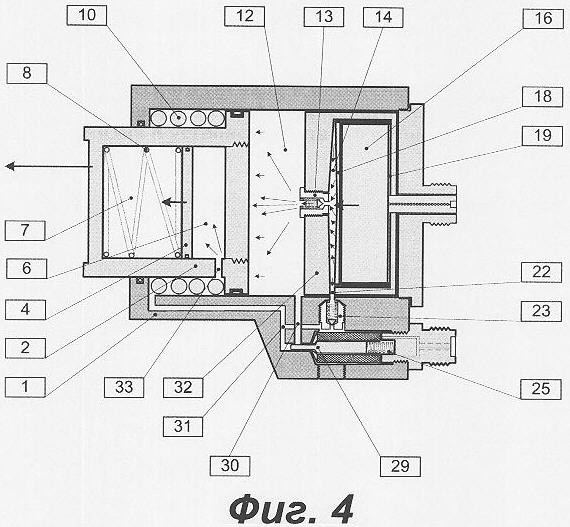
фиг.4 - изображает положение деталей и потоки жидкости электропьезогидравлического исполнительного механизма в начале рабочего такта пьезоэлектрического элемента при почти полностью выбранном рабочем ходе подвижного поршня;
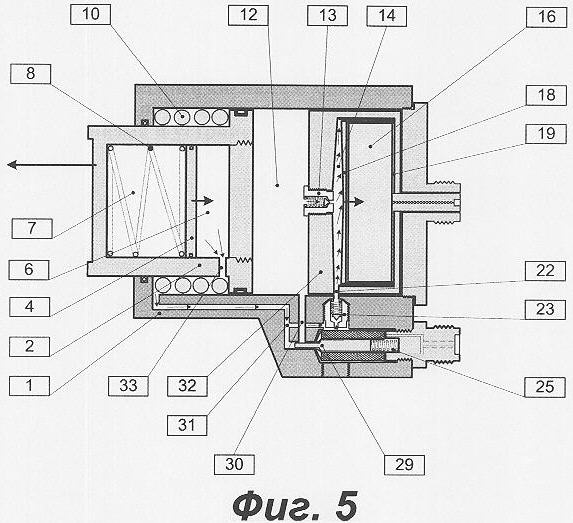
фиг.5 - изображает положение деталей и потоки жидкости электропьезогидравлического исполнительного механизма в конце рабочего такта пьезоэлектрического элемента при почти полностью выбранном рабочем ходе подвижного поршня;
фиг.6 - изображает положение деталей и потоки жидкости электропьезогидравлического исполнительного механизма при открытом клапане с дистанционным управлением;
Электропьезогидравлический исполнительный механизм состоит из корпуса гидравлического цилиндра 1, внутри которого установлен подвижный поршень 2, в который ввернута крышка 5, необходимая с технологической точки зрения и составляющая с поршнем одно целое. Внутри поршня 2 находятся компенсационная перегородка 4 с уплотнениями 3 и пружиной 8, также в поршне выполнен перепускной канал 33. Стенки поршня 2 и компенсационной перегородки 4 образуют с одной стороны объем компенсационной полости 7, с другой - часть объема промежуточной полости 6, полный объем которой включает также объем между стенками гидравлического цилиндра 1 и стенками поршня 2, соединяемый перепускным каналом 33 и находящийся со стороны, противоположной объему рабочей полости. Объем промежуточной полости используется для хранения запаса жидкости, необходимого для работы И.М. Компенсационная полость 7 служит для компенсации изменения объема жидкости, находящегося в промежуточной полости, при перекачке жидкости в рабочую полость 12 и обратно, а также для компенсации температурных изменений объема жидкости.
Для обеспечения герметичности подвижного поршня 2 служат уплотнения 9 и 11. Для того чтобы поршень 2 не выдвигался из корпуса гидравлического цилиндра 1 под воздействием давления в компенсационной полости 7, служит уравнительная пружина 10.
Объем рабочей полости 12 образуется стенками гидравлического цилиндра 1, неподвижной перегородки 32 и поршня 2 с крышкой 5. Клапаны 13 и 23 формируют направленный поток жидкости из промежуточной полости 6 в рабочую полость 12, через нагнетательную полость 14. Объем нагнетательной полости 14 образуется подвижным электродом 18 пьезоэлектрического элемента 16 и стенками неподвижной перегородки 32, выполненной в виде полого цилиндра и вставленной в корпус гидравлического цилиндра 1. Рабочее напряжение питания (служащее одновременно управляющим сигналом) подается на пьезоэлектрический элемент 16 с помощью подвижного электрода 18 и неподвижного электрода 19, который электропроводом 20 связан с электрическим разъемом 21, расположенным в крышке корпуса гидравлического цилиндра 17.
Антифрикционное покрытие 15 пьезоэлектрического элемента 16 служит одновременно электрическим изолятором для предотвращения пробоя рабочего напряжения сигнала. Впускной канал 22, выполненный с одной стороны в стенке неподвижной перегородки 32, а с другой - в стенке корпуса гидравлического цилиндра 1, служит для прохождения жидкости в нагнетательную полость 14 от гидравлического клапана 23.
Электрический разъем 24 служит для передачи питания обмотке электромагнита 27, электрическое соединение которых осуществляется через контакты 26. Электромагнит состоит из обмотки 27, якоря 29 и пружины 26. Якорь 29 электромагнита служит одновременно клапаном, который управляет перекрытием выпускного канала 30 и его соединением с перепускным каналом 31.
Технологическая заглушка 28 служит для удобной установки и обслуживания клапана 23.
Рассмотрим схему работы электропьезогидравлического исполнительного механизма и реализацию способа преобразования энергии управляющего электрического сигнала в механическую работу.
Исходное состояние исполнительного механизма следующее: полости 6, 12, 14 и соединяющие их каналы 22, 30, 31, 33 заполнены жидкостью, поршень 2 находится в крайнем правом положении, уравнительная пружина 10 максимально разжата, компенсационная перегородка 4 у крайнего левого положения, компенсационная пружина 8 сжата. Объем компенсационной 7 и рабочей полостей 12 минимален (объем компенсационной полости еще может уменьшаться на небольшую величину), объем промежуточной 6 и нагнетательной 14 максимален. Клапаны 13, 23, 29 закрыты (фиг.1).
При подаче напряжения питания на электроды 18 и 19 пьезоэлектрического элемента 16, за счет внутренних свойств под действием электрического поля, он увеличивает свой объем, меняя свои линейные размеры в поперечном сечении (фиг.2, здесь и в дальнейшем тонкими стрелками показаны направления потоков жидкости, а жирными - перемещения подвижных элементов), т.е. подвижный электрод 18 начинает двигаться в направлении неподвижной перегородки 32 (влево по чертежу) сжимая жидкость, находящуюся в нагнетательной полости 14, при этом клапан 23 дополнительно уплотняется создавшимся давлением, а клапан 13 под действием этого давления открывается и осуществляет перепуск жидкости из нагнетательной полости 14 в рабочую полость 13. Поршень 2 сдвигается в направлении от неподвижной стенки 32 (влево по чертежу) совершая рабочий ход. Изменение объема жидкости (в данном случае уменьшение) в промежуточной полости 6 компенсируется некоторым уменьшением объема компенсационной полости 7 за счет сжатия пружины 8 и сдвига компенсационной перегородки 4. Таким образом, движение поршня 2 осуществляется синхронно с движением подвижного электрода 18 пьезоэлектрического элемента. Движение поршня продолжается до тех пор, пока пьезоэлектрический элемент не выберет свой максимальный объем. После того как это произошло, напряжение с его электродов снимается, и он под действием внутренних сил начинает уменьшать свой объем (фиг.3). При этом клапан 13 под действием сил своей пружины, давления в рабочей полости 12 и создающегося разрежения в нагнетательной полости 14 закрывается, тем самым перекрывая отток жидкости из рабочей полости в нагнетательную. Клапан 23 под действием разрежения в нагнетательной полости 14 некоторого избыточного давления в промежуточной полости 6, созданного компенсационной пружиной 8, и преодолевая усилие собственной пружины, открывается, перепуская жидкость по каналам 31, 33 и 22 из промежуточной полости в нагнетательную. Нагнетательная полость заполняется. По завершении этого процесса клапан 23 под действием усилия собственной пружины закрывается.
Рабочий такт пьезоэлектрического элемента считается завершенным.
При этом следует отметить, что изменение объема пьезоэлектрического элемента весьма незначительно и ход подвижного электрода составляет ˜0,09% от ширины поперечного сечения пьезоэлектрического элемента (расстояния между электродами). Например, при диаметре пьезоэлектрического элемента 4 см, расстоянии между электродами 1 см изменение рабочего объема нагнетательной камеры составит 0,011304 см3, поэтому перемещение поршня 2 за один рабочий такт пьезоэлектрического элемента (при диаметре поршня принятом равным диаметру пьезоэлектрического элемента) составит всего 0,0009 см. Такой малый ход компенсируется возможностью значительного увеличения частоты работы пьезоэлектрического элемента (соответственно увеличению скорости перемещения поршня) и оборачивается достоинством с точки зрения точного позиционирования рабочего органа.
Необходимое перемещение поршня задается соответствующим количеством рабочих тактов пьезоэлектрического элемента (в дальнейшем для краткости - пьезоэлемента) и напряжением сигнала, скорость этого перемещения задается частотой и (или) скважностью работы пьезоэлемента (или, что - то же самое, частотой управляющего сигнала и (или) скважностью его импульсов), а также временем нарастания амплитуды напряжения сигнала, т.е. в конечном счете - формой сигнала. На фигурах 4 и 5 показано положение деталей электропьезогидравлического И.М. на одном из заключительных тактов работы пьезоэлемента, когда поршень 2 выбрал почти всю величину своего возможного рабочего хода.
Частота работы пьезоэлемента выбирается с точки зрения рабочей необходимости и определяется типом используемой рабочей жидкости, материалом и конструкцией нагнетательной камеры, ее формой, материалом и конструкцией пьезоэлемента. При этом не исключается возможность работы пьезоэлемента в резонансном режиме, что достигается его работой непосредственно на определенной резонансной частоте или на некоторой граничной частоте с последующим переходом на резонансную, т.е. осуществлением девиации или модулирования управляющего электрического сигнала.
Клапан с дистанционным управлением 29 представляет собой совокупность каналов 30 и 31 и якоря электромагнита 29. Управление им осуществляется подачей напряжения на обмотку электромагнита 27 через электрический разъем 24. Клапан служит для перепуска жидкости из рабочей полости 12 в промежуточную полость 6. Жидкость перемещается под действием давления уравнительной пружины 10, которая создает усилие большее, чем давление, существующее в компенсационной полости 7.
При подаче напряжения на обмотку электромагнита 27 клапан 29 открывается (фиг.6) и соединяет между собой посредством каналов 30 и 31, рабочую 12 и промежуточную 6 полости, жидкость, находящаяся в рабочей полости, начинает вытесняться поршнем 2 под усилием уравнительной пружины 10 в промежуточную полость, позволяя поршню перемещаться назад, к исходному положению, в направлении неподвижной перегородки 32, при этом изменение объема промежуточной полости компенсируется соответствующим изменением объема компенсационной полости 7. После прекращения подачи напряжения клапан 29 закрывается под действием усилия пружины 25, полости 6 и 12 разобщаются, перепуск жидкости становится невозможным.
Пропускная способность каналов 30, 31, 33 и клапана 29 выбирается таким образом, чтобы обеспечить перепуск объема жидкости, достаточного для перемещения поршня 2 под действием уравнительной пружины 10, даже при непрекращающейся работе пьезоэлемента 16. Таким образом, управляя работой клапана 29, осуществляется управление направлением движения поршня 2 и соответственно дополнительное управление работой всего электропьезогидравлического И.М.
Усилие, которое способен развить электропьезогидравлический И.М., весьма велико и определяется внутренними свойствами пьезоэлектрического элемента, а также необходимым соотношением площадей поршня гидравлического цилиндра и поверхности пьезоэлемента. В частности, пьезоэлемент способен развить усилие сдвига до 30 Н/мм2 (данные взяты из источника «Автомобильный справочник BOSCH», изд. «За рулем», Москва, 2002, стр.128), что при диаметре пьезоэлемента 40 мм и соответственно площади поверхности, равной 1256 мм2, составляет усилие 37 680 Н или 3768 кг. При этом величина усилия, развиваемого пьезоэлементом, и соответственно усилия, развиваемого И.М. в целом, контролируется с помощью датчика давления, в качестве которого используется сам пьезоэлемент, давление вычисляется косвенным путем, на основе измерений изменения нарастания (убывания) напряжения и (или) тока на электродах пьезоэлектрического элемента в зависимости от изменения давления на его поверхность.
Величина электрического напряжения, подаваемого на электроды пьезоэлемента, его частота, скважность, амплитуда нарастания формируют в конечном счете форму электрического сигнала и могут варьироваться в зависимости от необходимости в широких пределах, осуществляя управление работой пьезоэлемента и соответственно И.М. в целом, при этом электрическая энергия этого сигнала, последовательно преобразуясь в механическую работу, используется для перемещения и создания рабочего усилия на поршне И.М.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА КЛАПАНА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ КЛАПАНА | 2004 |
|
RU2338075C2 |
| КЛАПАННЫЙ ГАЗОРАСПРЕДЕЛИТЕЛЬНЫЙ МЕХАНИЗМ И СПОСОБ КЛАПАННОГО ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251005C2 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2012 |
|
RU2489605C1 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2014 |
|
RU2577681C1 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2013 |
|
RU2527260C1 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2016 |
|
RU2630050C1 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2014 |
|
RU2577680C1 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2012 |
|
RU2489604C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ В ПОЛИВНУЮ ВОДУ | 2012 |
|
RU2496295C1 |
| ГИДРАВЛИЧЕСКИЙ ТАРАН | 2016 |
|
RU2630803C1 |
Изобретение относится к машиностроению, в частности к электрогидравлическим шаговым приводам, и может быть использовано для создания различных механизмов, транспортных средств. Способ заключается в преобразовании энергии управляющего электрического сигнала в механическую работу перемещения поршня гидравлического исполнительного механизма, в котором исполнительный механизм содержит гидравлический цилиндр с размещенным внутри него подвижным поршнем, при этом давление жидкости, действующей на поршень, создается под воздействием усилия, по меньшей мере, одного пьезоэлектрического элемента. Устройство состоит из гидравлического цилиндра с размещенным внутри него подвижным поршнем и пьезоэлектрического элемента, который установлен в корпусе гидравлического цилиндра и отделен от поршня неподвижной перегородкой. Технический результат заключается в возможности достижения высоких технических характеристик: малой массы, минимального количества подвижных деталей, способности создавать значительные рабочие усилия, малого времени реакции на управляющее воздействие и возможности точного позиционирования при упрощении схемы и алгоритма управления приводом. 2 н. и 26 з.п. ф-лы, 6 ил.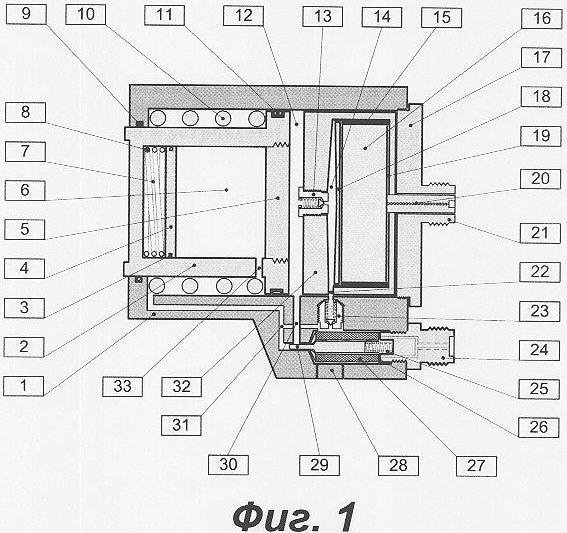
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| Пьезоэлектрический трансформатор | 1976 |
|
SU547978A1 |
| Банштык A.M | |||
| Электрогидравлические сервомеханизмы с широтно-импульсным управлением | |||
| - М.: Машиностроение, 1972, с.67-69; 5-9; 11-14 | |||
| Беязов Й.Й | |||
| Аналоговые гидроусилители | |||
| - Л., Ленингр | |||
| отд-ние: Машиностроение, 1983, с.14, 100; 88; 140-141; 129-130, рис.5.11 | |||
| 0 |
|
SU153624A1 | |
| Варсанофьев | |||

