Область техники
Данное изобретение относится, в общем, к пипетке для забора и распределения регулируемых объемов жидкости. В частности, данное изобретение касается программируемой электронной пипетки, предусматривающей различные режимы работы.
Предпосылки создания изобретения
При фармацевтических исследованиях, исследованиях по геномике и протеомике, биологических исследованиях, в лабораториях, разрабатывающих лекарства, жидкостная пипетка используется для манипулирования с лабораторными образцами в различных лабораторных операциях. При использовании пипетки в нее осуществляется всасывание объема жидкости. Этот объем жидкости затем может раздаваться с одинаковыми или разными объемами доз. Механизм привода поршня управляет забором и распределением жидкости с заданными объемами, сообщая движение поршневому узлу. Пипетки, у которых поршневые узлы в корпусе пипетки содержат поршневой шток, управляемый двигателем или непосредственно пользователем, известны специалистам в данной области техники. Однако в механизме привода поршня может возникать угловое смещение деталей относительно поршневого узла. Это смещение часто вызывает небольшой, но измеримый продольный сдвиг механизма привода поршня, который, в свою очередь, вызывает неточный забор или распределение объема жидкости. Таким образом, необходима пипетка, в которой исключается нежелательное продольное смещение деталей механизма привода поршня.
Пипетка может работать в ручном режиме, в котором пользователь вручную регулирует скорость и объем забора или распределения жидкости с помощью кнопки, чувствительной к давлению. В качестве альтернативы пипетка может работать в электронном режиме, в котором двигатель регулирует забор и/или распределение жидкости. Пользователь может выбирать различные параметры, включая скорость, объем, число заборов, число распределений и т.д., используя пользовательский интерфейс. Пользовательский интерфейс может содержать цифровую клавиатуру, которая позволяет пользователю вводить, например, объем. Пипетка, как правило, является маленькой и легкой вследствие потребности в легко переносимом устройстве, которое удобно помещается в руке пользователя и которое может периодически использоваться одной рукой. В результате, дисплей и органы управления должны быть миниатюрными, что делает их, как правило, утомительными для использования. Например, некоторые пипетки могут иметь небольшую цифровую клавиатуру, тогда как ввод в другие пипетки может осуществляться через группу кнопок, таких как кнопки "стрелка вверх" и "стрелка вниз" для увеличения или уменьшения параметра. Однако цифровую клавиатуру трудно использовать, так как цифровая кнопка мала и ее трудно выбирать, особенно когда пользователь носит перчатки. К тому же использование кнопок клавиатуры, как правило, требует использования обеих рук: одной руки для поддерживания устройства и другой руки для точного выбора подходящей цифровой кнопки. Кроме того, пользователю может требоваться последовательно дозировать несколько значительно отличающихся объемов. Кнопки "стрелка вверх" и "стрелка вниз" требуют большого числа нажатий для достижения, например, значительно отличающихся значений объемов. Таким образом, имеется потребность в пипетке, имеющей входной интерфейс, который упрощает выбор рабочих параметров устройства и сокращает время, необходимое для изменения установочных параметров в устройстве. Кроме того, требуется интерфейс ввода, которым можно управлять с помощью одной руки.
Электронные пипетки обычно управляются небольшими микропроцессорами, расположенными в корпусе пипетки. По мере совершенствования электронных пипеток могут быть обеспечены более сложные режимы работы. Например, электронная пипетка может конфигурироваться для забора некоторого объема жидкости и распределения объема в последовательных циклах распределения. Кроме того, электронная пипетка может конфигурироваться для многократного забора и распределения объема жидкости, смешивая таким образом жидкость перед окончательным распределением. Дополнительную сложность может добавлять последовательность режимов, выполняемых подряд. Однако дисплей и органы управления также малы и утомительны для использования, что затрудняет "программирование" электронной пипетки для выполнения сложной последовательности операций. Таким образом, требуется пипетка, которая может взаимодействовать с внешним вычислительным устройством. Кроме того, необходима прикладная программа, которая может выполняться на внешнем вычислительном устройстве, чтобы обеспечивать легкий для использования интерфейс пользователя и предоставлять команды пипетке для работы в "программируемом" режиме.
Сущность изобретения
Пример осуществления изобретения относится к способу использования пользовательского интерфейса, представленного на дисплее устройства. Способ включает, по меньшей мере, перемещение между несколькими элементами (пунктами меню), представленными на дисплее устройства, посредством сообщения вращательного движения диску, установленному в первой плоскости устройства, и выбора элемента из множества элементов посредством сообщения поступательного движения диску в первой плоскости. Кроме того, способ может включать модификацию элемента путем сообщения вращательного движения диску в первой плоскости и установку модифицированного элемента путем сообщения поступательного движения диску в первой плоскости.
Другой пример осуществления изобретения относится к способу ответа на ввод в пользовательский интерфейс данных пользователя, представляемых на дисплее устройства. Способ включает, по меньшей мере, прием первого сигнала, указывающего перемещение между несколькими элементами, причем первый сигнал генерируется путем сообщения вращательного движения диску, установленному в первой плоскости устройства, а множество элементов меню отображается на дисплее устройства, и прием второго сигнала, указывающего выбор элемента из множества элементов, причем второй сигнал генерируется путем сообщения поступательного движения диску в первой плоскости. Способ может далее включать прием третьего сигнала, указывающего на модификацию элемента, причем третий сигнал генерируется путем сообщения вращательного движения диску, установленному в первой плоскости, и прием четвертого сигнала, указывающего, что модифицированный элемент должен быть установлен в устройстве, причем четвертый сигнал генерируется путем сообщения поступательного движения диску в первой плоскости.
Еще один пример осуществления изобретения относится к устройству для использования пользовательского интерфейса, представленного на дисплее устройства. Устройство содержит, по меньшей мере, ось, диск, датчик положения, датчик движения, дисплей и микропроцессор. Диск крепится к оси так, чтобы позволить вращение диска вокруг оси в плоскости устройства, и диск может поступательно перемещаться в плоскости устройства. Датчик положения конфигурируется для генерации первого электрического сигнала, показывающего первое вращение диска вокруг оси, первое вращение происходит в плоскости устройства. Датчик движения конфигурируется для генерации второго электрического сигнала, показывающего первое поступательное перемещение диска в плоскости устройства. Микропроцессор соединяется с дисплеем и конфигурируется для приема первого электрического сигнала, причем первое вращение диска показывает перемещение между множеством элементов, имеющихся на дисплее, и для приема второго электрического сигнала, причем первое поступательное движение диска показывает выбор элемента из множества элементов, имеющихся в дисплее.
Еще один пример осуществления изобретения относится к устройству для забора и распределения жидкости. Устройство содержит, по меньшей мере, плоский дисковый манипулятор, дисплей, пробоотборную трубку и микропроцессор. Плоский дисковый манипулятор содержит, по меньшей мере, ось, диск, датчик углового положения и датчик движения. Диск крепится к оси таким образом, чтобы позволить вращение диска вокруг оси в плоскости устройства, и диск может поступательно перемещаться в плоскости устройства. Датчик положения конфигурируется для генерации первого электрического сигнала, показывающего вращение диска вокруг оси, которое происходит в плоскости устройства. Датчик движения конфигурируется для генерации второго электрического сигнала, показывающего поступательное перемещение диска в плоскости устройства. Пробоотборная трубка имеет узел для удержания жидкости.
Микропроцессор соединяется с дисплеем и конфигурируется для регулирования жидкости в пробоотборной трубке, для приема первого электрического сигнала, при этом вращение диска показывает перемещение между множеством элементов, представленных на дисплее, и для приема второго электрического сигнала, при этом поступательное движение диска показывает выбор элемента из множества элементов, представленных на дисплее.
Еще один пример осуществления изобретения относится к устройству для забора и распределения жидкости. Устройство содержит, по меньшей мере, пробоотборную трубку, поршневой узел и механизм привода поршня. Поршневой узел прикреплен к пробоотборной трубке и содержит, по меньшей мере, поршневой шток, который установлен в пробоотборной трубке. Механизм привода поршня содержит, по меньшей мере, приводной шток, имеющий поверхность, которая контактирует с поршневым узлом. Механизм привода поршня конфигурируется для перемещения поршневого штока поршневого узла в пробоотборной трубке, таким образом обеспечивая регулирование жидкости в пробоотборной трубке. Поверхность управляющего штока является неплоской поверхностью.
Еще один пример осуществления изобретения относится к способу управления пипеткой. Способ включает, по меньшей мере, прием интерфейсом связи пипетки электрических сигналов от вычислительного устройства, причем вычислительное устройство не составляет одно целое с пипеткой, и выполнение операции в пипетке в ответ на принимаемые электрические сигналы.
Еще один пример осуществления изобретения относится к устройству для забора и распределения жидкости. Устройство содержит, по меньшей мере, пробоотборную трубку, поршневой узел, механизм привода поршня, интерфейс связи и микропроцессор. Поршневой узел прикреплен к пробоотборной трубке и содержит, по меньшей мере, поршневой шток, который установлен в пробоотборной трубке. Механизм привода поршня содержит, по меньшей мере, контрольный шток, имеющий поверхность, которая контактирует с поршневым узлом. Механизм привода поршня конфигурируется для перемещения поршневого штока поршневого узла в пробоотборной трубке, таким образом вызывая регулирование жидкости в пробоотборной трубке. Интерфейс связи конфигурируется для приема электрических сигналов от вычислительного устройства, причем вычислительное устройство не составляют одно целое с упомянутым устройством для забора и распределения жидкости. Микропроцессор конфигурируется для управления механизмом привода поршня для выполнения операции в ответ на принимаемые электрические сигналы.
Еще один пример осуществления изобретения относится к системе для управления забором или распределением жидкости в пипетке. Система содержит, по меньшей мере, вычислительное устройство и пипетку. Вычислительное устройство содержит, по меньшей мере, модуль управления пипеткой и первый интерфейс связи. Модуль управления пипеткой содержит, по меньшей мере, компьютерную программу, конфигурированную для задания операции для выполнения пипеткой. Первый интерфейс связи конфигурируется для передачи пипетке электронных сигналов, задающих операцию для выполнения в пипетке. Пипетка содержит, по меньшей мере, пробоотборную трубку, поршневой узел, механизм привода поршня, второй интерфейс связи и микропроцессор. Поршневой узел прикреплен к пробоотборной трубке и содержит, по меньшей мере, поршневой шток, который установлен в пробоотборной трубке. Механизм привода поршня содержит, по меньшей мере, контрольный шток, имеющий поверхность, которая контактирует с поршневым узлом. Механизм привода поршня конфигурируется для перемещения поршневого штока поршневого узла в пробоотборной трубке, что вызывает регулирование жидкости в пробоотборной трубке. Второй интерфейс связи конфигурируется для приема электронных сигналов от вычислительного устройства. Микропроцессор связывается со вторым интерфейсом связи и конфигурируется для управления механизмом привода поршня и для выполнения операции, задаваемой электрическими сигналами.
Другие принципиальные особенности и преимущества изобретения станут ясны специалистам в данной области техники после рассмотрения нижеследующих чертежей, подробного описания изобретения и прилагаемой формулы изобретения.
Перечень чертежей
Предпочтительные формы осуществления изобретения описываются ниже со ссылкой на приложенные чертежи, на которых одинаковыми номерами обозначены одинаковые элементы.
На фиг.1 показано перспективное изображение электронной пипетки согласно примеру осуществления изобретения.
На фиг.2 показано первое перспективное изображение с пространственным разделением деталей электронной пипетки фиг.1.
На фиг.3 показано второе перспективное изображение с пространственным разделением деталей электронной пипетки фиг.1.
На фиг.4 показан разрез электронной пипетки фиг.1.
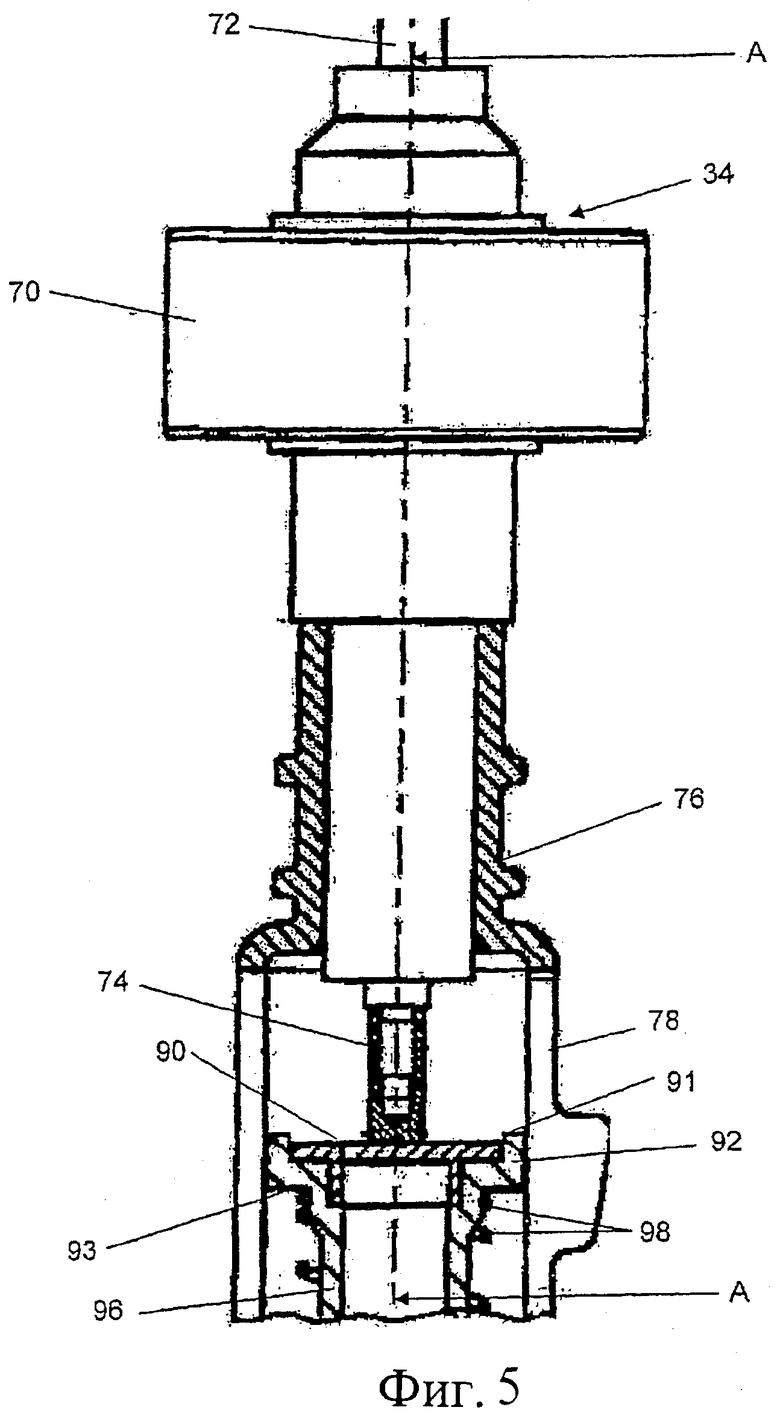
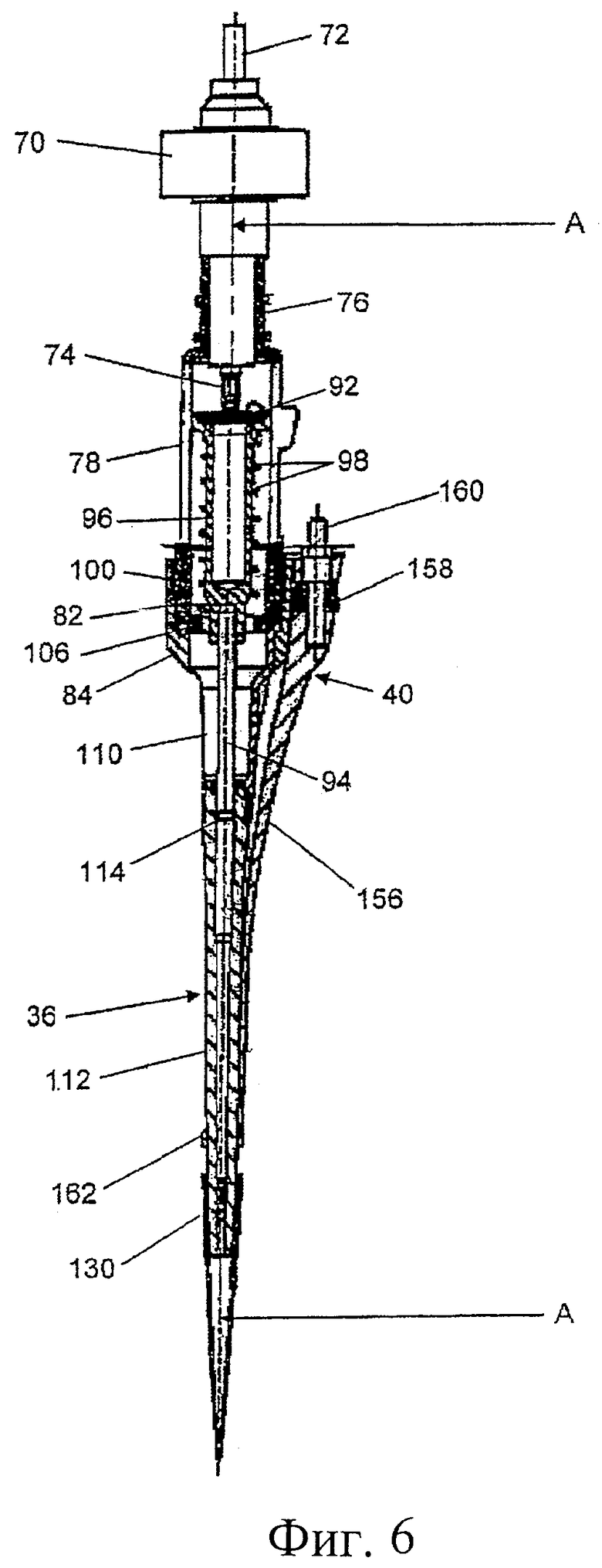
На фиг.5 показан первый разрез механизма привода поршня электронной пипетки согласно примеру осуществления изобретения. На фиг.6 показан разрез механизма привода поршня, поршневого узла, пробоотборной трубки и внешнего механизма для снятия наконечника электронной пипетки согласно примеру осуществления изобретения.
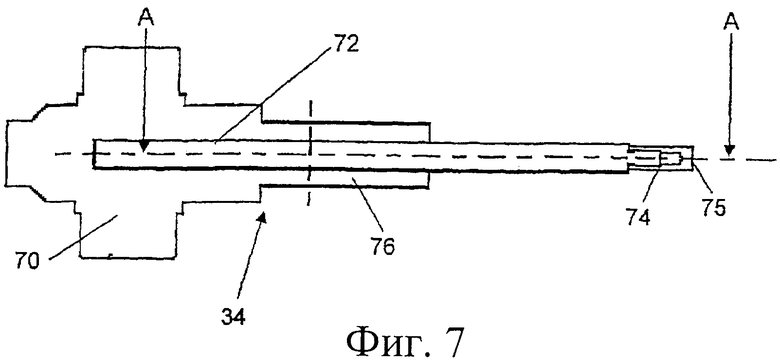
На фиг.7 показан второй разрез механизма привода поршня электронной пипетки согласно примеру осуществления изобретения.
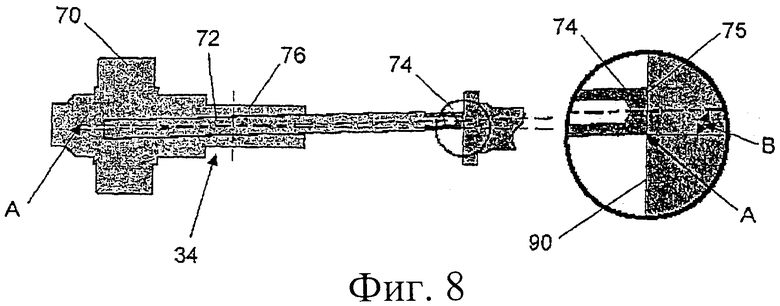
На фиг.8 показан первый разрез механизма привода поршня в контакте с поршневым узлом электронной пипетки согласно примеру осуществления изобретения.
На фиг.9 показан второй разрез механизма привода поршня в контакте с поршневым узлом электронной пипетки согласно примеру осуществления изобретения.
На фиг.10 показано первое перспективное изображение пользовательских органов управления электронной пипетки согласно примеру осуществления изобретения.
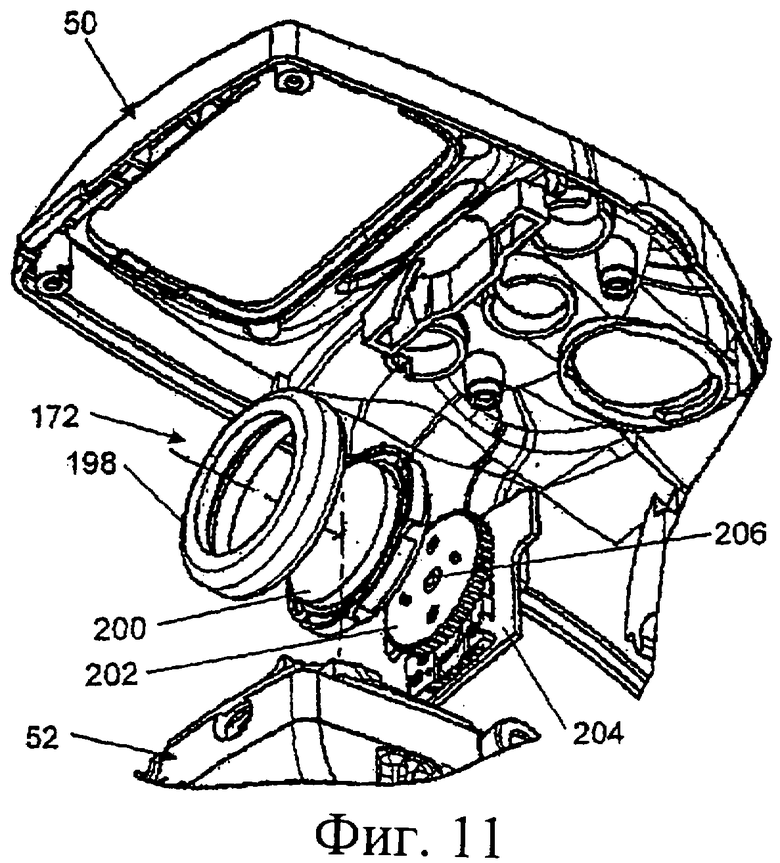
На фиг.11 показано перспективное изображение с пространственным разделением деталей дискового манипулятора пользовательских органов управления электронной пипетки согласно примеру осуществления изобретения.
На фиг.12 показано изображение дискового манипулятора пользовательского интерфейса электронной пипетки согласно примеру осуществления изобретения.
На фиг.13 показана временная диаграмма сигналов, используемых при работе дискового манипулятора фиг.11 согласно примеру осуществления изобретения.
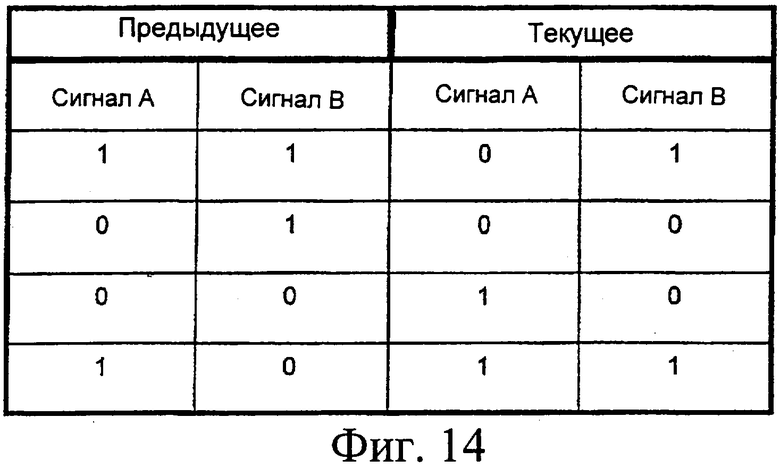
На фиг.14 показана первая таблица сигналов, получающихся при вращении в положительном направлении дискового манипулятора фиг.11 согласно примеру осуществления изобретения.
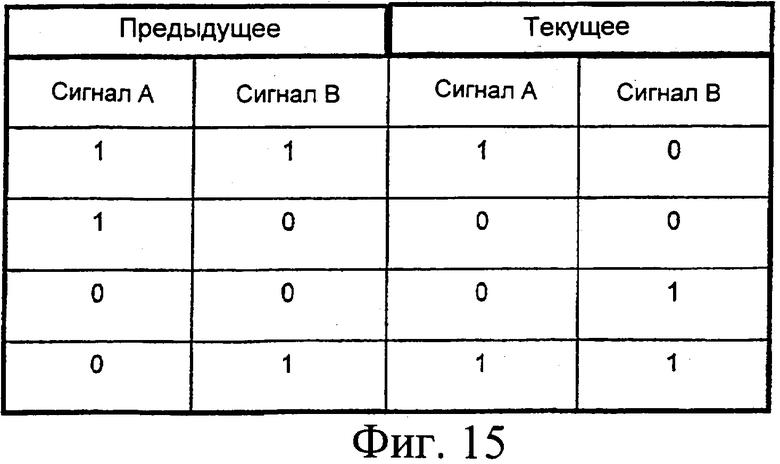
На фиг.15 показана вторая таблица сигналов, получающихся при вращении в отрицательном направлении дискового манипулятора фиг.11 согласно примеру осуществления изобретения.
На фиг.16 показано второе перспективное изображение пользовательских органов управления электронной пипетки согласно примеру осуществления изобретения.
На фиг.17 показан вид сверху пользовательских органов управления электронной пипетки согласно примеру осуществления изобретения.
На фиг.18 показана схема системы, использующей электронную пипетку фиг.1, согласно альтернативным примерам осуществления изобретения.
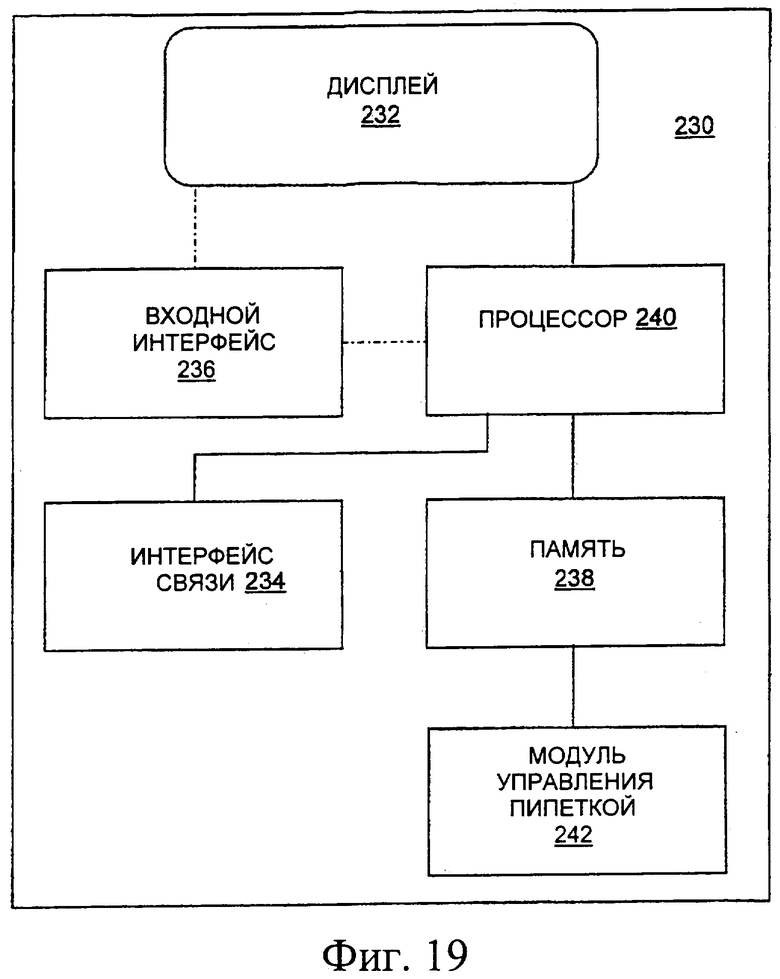
На фиг.19 показана блок-схема вычислительного устройства, способного осуществлять связь с электронной пипеткой, согласно примеру осуществления изобретения.
На фиг.20 показана блок-схема множества элементов меню и последовательность изображений, которые могут отображаться на дисплее электронной пипетки согласно примеру осуществления изобретения.
Подробное описание предпочтительных форм осуществления изобретения
В примере осуществления изобретения, показанном на фиг.1, электронная пипетка 30 может содержать одну или несколько пробоотборных трубок 36, которые вмещают различные количества жидкости. Электронная пипетка 30 может управляться для автоматического забора и распределения последовательности объемов жидкости в одной или нескольких пробоотборных трубках 36. Электронная пипетка 30 содержит ряд компонентов и подсистем, которые вместе обеспечивают различные режимы для забора и распределения жидкостей с точными объемами. Как показано на фиг.2 и 3, в примере осуществления изобретения компоненты и подсистемы могут содержать, по меньшей мере, корпус 32, механизм 34 привода поршня, поршневой узел 35, пробоотборную трубку 36, внутреннюю подсистему 38 питания, внешний механизм 40 для сброса наконечника, внутренний механизм 42 для сброса наконечника и плату 44 электронных схем управления. Некоторые из этих компонентов и подсистем известны специалистам в данной области техники и поэтому не будут здесь подробно рассматриваться. Внутренняя подсистема 38 питания может содержать батарею 120, соединитель 122 и кожух 124 батареи. Кожух 124 батареи вмещает батарею 120 и входит в корпус 32. Батарея может питать энергией, например, механизм 34 привода поршня и/или плату 44 электронных схем управления. Соединитель 122 обеспечивает электрическое соединение с платой 44 электронных схем управления.
Корпус 32 обеспечивает удобный внешний кожух для пользователя, держащего пипетку 30, и защищает компоненты пипетки 30. Корпус 32 содержит, по меньшей мере, передний кожух 50, задний кожух 52, опору 54 для пальца, направляющую 56 соединения корпуса, крышку 58 дисплея и крышку 60, изготовленную по требованиям заказчика. Передний кожух 50 соединен с задним кожухом 52, чтобы вмещать механизм 34 привода поршня, поршневой узел 35, внутренний механизм 42 для сброса наконечника и плату 44 электронных схем управления. Упор 54 для пальца обеспечивает точку поддержки, например, для указательного пальца пользователя пипетки, чтобы упираться в него во время удержания корпуса пипетки 30 в руке и когда при использовании пипетки 30 пользователь управляет ею большим пальцем той же руки. Пипетка 30 предусматривает управление левой или правой рукой пользователя. Один или несколько винтов 55 или других крепежных устройств могут прикреплять упор 54 для пальца к верхней части 62 заднего кожуха 52. В данном раскрытии сущности изобретения термин "прикреплять" включает в себя соединение, объединение, сочленение, вставление, прикрепление, закрепление, фиксирование, присоединение, жесткое закрепление, связывание, приклеивание, скрепление, скрепление болтами, скрепление винтами, соединение заклепками, пайку припоем, сварку и другие аналогичные термины. Верхняя часть 62 заднего кожуха 52 может иметь наклон от пользователя, смотрящего на крышку 58 дисплея и держащего пипетку 30 вертикально, вдоль продольной оси А-А, показанной на фиг.4. Наклон от пользователя обеспечивает более удобную посадку пипетки 30 в руке и улучшенный угол обзора для крышки 58 дисплея.
Упор 54 для пальца может подвижно крепиться к заднему кожуху 52, обеспечивая пользователю удобное положение упора 54 для пальца, исходя из размера руки пользователя. Направляющая 56 соединения корпуса скользит поверх конца 51 переднего кожуха 50 и конца 53 заднего кожуха 52 для монтажа переднего кожуха 50 к заднему кожуху 52. Один или несколько винтов 57 могут съемно прикреплять направляющую 56 соединения корпуса к переднему кожуху 50 и/или заднему кожуху 52, чтобы разбирать и снова собирать пипетку 30. Крышка 58 дисплея может быть сформирована из пластмассы, стекла или другого подходящего прозрачного материала, который защищает дисплей 170 платы 44 электронных схем управления. Крышка 60, изготовленная по требованиям заказчика, может быть сформирована из пластмассы, стекла или другого подходящего прозрачного материала, который защищает табличку 64, изготовленную по требованиям заказчика и используемую для обеспечения возможности быстрой идентификации пипетки 30.
Механизм 34 привода поршня вызывает забор и распределение заданного объема жидкости через пробоотборную трубку 36, перемещая поршневой шток 94 в поршневом узле 35 вдоль продольной оси А-А в пробоотборной трубке 36. Движение поршня создает перемещение воздуха, которое забирает или дозирует жидкость в пробоотборную трубку 36 или из нее. Механизм привода поршня может вручную управляться пользователем, например, посредством нажатия кнопки или может управляться с помощью двигателя. Как показано на фиг.2-5, в примере осуществления изобретения механизм 34 привода поршня может содержать, по меньшей мере, привод 70, приводной шток 72, наконечник 74 приводного штока, опору 76 приводного штока, корпус 78 и головку 80 присоединения пробоотборной трубки. Механизм 34 привода поршня может съемно монтироваться в корпусе 32 пипетки 30 таким образом, что приводной шток 72 проходит по продольной оси А-А. В примере осуществления изобретения головка 80 присоединения пробоотборной трубки может крепиться к корпусу 32.
Привод 70 может быть двигателем с регулируемой мощностью для перемещения приводного штока 72 под управлением микропроцессора (не показан), смонтированного на плате 44 электронных схем управления. Привод 70 может быть реализован с использованием различных электромеханических устройств, которые известны специалистам в данной области техники. Привод 70 точно перемещает приводной шток 72 вверх и вниз по оси А-А для забора и распределения жидкости в пробоотборную трубку 36 или из нее. Привод 70 взаимодействует с микропроцессором платы 44 электронных схем управления, от которого привод 70 получает электрические сигналы для управления смещением приводного штока 72. Плата 44 электронных схем управления может включить один или более соединителей или интерфейсов для связи с приводом 70. Наконечник 74 приводного штока крепится к концу приводного штока 72, противоположному приводу 70. Например, наконечник 74 приводного штока может навинчиваться на приводной шток 72 или ввинчиваться в него. Опора 76 приводного штока обеспечивает перемещение приводного штока 72 по продольной оси А-А. Корпус 78 крепится к опоре 76 приводного штока и вмещает часть приводного штока 72 и наконечник 74 приводного штока, которые проходят вне опоры 76 приводного штока. Таким образом, например, корпус 78 может формировать стакан.
Головка 80 присоединения трубки проходит от конца корпуса 78, противоположного опоре 76 приводного штока. Головка 80 присоединения трубки содержит внешнюю поверхность 82, которая может быть с резьбой. Гайка 84 присоединения трубки может содержать внутреннюю поверхность, которая садится на головку 80 присоединения трубки, таким образом съемно присоединяя пробоотборную трубку 36 к корпусу 32 пипетки 30, как показано на фиг.1 и 3. Внутренняя поверхность гайки 84 присоединения трубки может также быть с резьбой для контакта с внешней поверхностью 82 головки 80 присоединения трубки.
Как показано на фиг.3, в примере осуществления изобретения поршневой узел 35 содержит, по меньшей мере, контактную пластину 90 поршня, головку 92 поршня, поршневой шток 94, корпус 96 поршня, возвратную пружину 98 поршня и направляющую 100 пружины. Контактная пластина 90 поршня может быть сформирована из металла или пластмассы. В примере осуществления изобретения контактная пластина 90 поршня формируется из металла. Головка 92 поршня может быть круглым диском, сформированным из металла или пластмассы. Головка 92 поршня имеет первую поверхность 91 и вторую поверхность 93, которая обращена в направлении, противоположном первой поверхности 91. Контактная пластина 90 поршня крепится к первой поверхности 91 головки 92 поршня, как показано на фиг.2 и 3. Поршневой шток 94 крепится ко второй поверхности 93 головки 92 поршня и проходит в направлении, по существу перпендикулярном второй поверхности 93 головки 92 поршня и противоположном первой поверхности 91. Поршневой шток 94 имеет по существу цилиндрическую форму. Поршневой шток 94 можно формировать из металла или из пластмассы. В примере осуществления изобретения поршневой шток 94 формируется из металла.
Корпус 96 поршня крепится ко второй поверхности 93 головки 92 поршня и проходит в направлении, по существу перпендикулярном второй поверхности 93 головки 92 поршня, и вмещает поршневой шток 94. Корпус 96 поршня можно формировать из металла или из пластмассы. В примере осуществления изобретения корпус 96 поршня формируется из пластмассы. Корпус 96 поршня имеет по существу цилиндрическую форму и может содержать одну или несколько конических секций, как показано на фиг.3. Возвратная пружина 98 поршня крепится к корпусу 96 поршня, примыкая ко второй поверхности 93 головки 92 поршня, и проходит по существу перпендикулярно второй поверхности 93 головки 92 поршня по продольной оси А-А. В примере осуществления изобретения возвратная пружина 98 поршня скользит по корпусу 96 поршня и удерживается на месте силами трения между возвратной пружиной 98 поршня и секцией корпуса 96 поршня, прилегающей ко второй поверхности 93 головки 92 поршня.
Направляющая 100 пружины может содержать полое цилиндрическое тело 102, опорное кольцо 104 и направляющее кольцо 106. Опорное кольцо 104 крепится к одному концу полого цилиндрического тела 102 и проходит от полого цилиндрического тела 102 по существу в перпендикулярном направлении от центра полого цилиндрического тела 102. Направляющее кольцо 106 крепится к опорному кольцу 104, расположенному напротив полого цилиндрического тела 102. Направляющее кольцо 106 имеет меньшую внутреннюю окружность, чем полое цилиндрическое тело 102. В примере осуществления изобретения корпус 96 поршня и возвратная пружина 98 поршня устанавливаются в полом цилиндрическом теле 102, как показано на фиг.3. При сборке пипетки 30 полое цилиндрическое тело 102 направляющей 100 пружины скользит по корпусу 96 поршня и возвратной пружине 98 поршня до тех пор, пока возвратная пружина 98 поршня не подожмет направляющее кольцо 106 направляющей 100 пружины, как показано на фиг.2. Поршневой узел 35 скользит в корпусе 78 поршневого приводного механизма, как показано на фиг.5.
Как показано на фиг.3, в примере осуществления изобретения пробоотборная трубка 36 содержит, по меньшей мере, верхнюю трубку 110, нижнюю трубку 112 и уплотнительное кольцо 114. Нижняя трубка 112 крепится к верхней трубке 110. Например, нижняя трубка 112 может содержать конец 116 с резьбой, который ввинчивается в комплементарную резьбовую поверхность верхней трубки 110. Верхняя трубка 110 и нижняя трубка 112 могут содержать одну или несколько конических секций. Уплотнительное кольцо 114 установлено в выточке 118, расположенной между верхней трубкой 110 и нижней трубкой 112. Уплотнительное кольцо 114 обеспечивает водонепроницаемое соединение между поршневым штоком 94 и нижней трубкой 112. Конец 119 верхней трубки 110 может садиться в опорное кольцо 104 направляющей 100 пружины. Направляющее кольцо 106 направляющей 100 пружины могут садиться в отверстие верхней трубки 110, сформированное в конце 119. Гайка 84 присоединения трубки скользит по пробоотборной трубке 36, которая прижимается к поршневому узлу 35, фиксируя таким образом пробоотборную трубку 36 относительно корпуса 32 и механизма 34 привода поршня, как показано на фиг.6.
На фиг.6 в качестве примера осуществления изобретения показан разрез механизма 34 привода поршня, поршневого узла 35, пробоотборной трубки 36 и внешнего механизма 40 для сброса наконечника, смонтированных для забора и распределения жидкости пользователем. Наконечник 74 приводного штока контактирует с контактной пластиной 90 поршня поршневого узла 35 в корпусе 78 механизма 34 привода поршня. При распределении жидкости механизм 34 привода поршня посредством смещения наконечника 74 приводного штока по продольной оси А-А отталкивает поршневой узел 35 от механизма 34 привода поршня в точке, где наконечник 74 приводного штока контактирует с контактной пластиной 90 поршня. Возвратная пружина 98 поршня нажимает на направляющую 100 пружины, удерживаемую на месте гайкой 84 присоединения трубки. При заборе жидкости механизм 34 привода поршня перемещает наконечник 74 приводного штока по направлению к механизму 34 привода поршня. Несмотря на это перемещение, контактная пластина 90 поршня остается в контакте с концом 74 приводного штока в результате действия сжимающего усилия возвратной пружины 98 поршня.
Как показано на фиг.7, в примере осуществления изобретения наконечник 74 приводного штока имеет поверхность 75 контакта, которая входит в контакт с контактной пластиной 90 поршня. В зависимости от того, где поверхность 75 контакта наконечника 74 приводного штока контактирует с контактной пластиной 90 поршня, может возникать угловое смещение. На фиг.7 показано идеальное выравнивание механизма 34 привода поршня. На фиг.8 и 9 показан пример смещения от заданного положения механизма 34 привода поршня, включая угловое смещение В и угловое смещение С относительно идеального выравнивания по продольной оси А-А. Если поверхность 75 контакта является плоской, угловое смещение может влиять на точность пипетки 30, изменяя интервал по продольной оси А-А, который приводной шток 72 проходит перед контактированием с контактной пластиной 90, и таким образом, изменяя объем жидкости, которая забирается или дозируется. Использование неплоской поверхности для поверхности 75 контакта наконечника 74 приводного штока поддерживает правильный интервал по продольной оси А-А, таким образом снижая неточность при операциях забора или распределения пипетки. В примере осуществления изобретения неплоская поверхность формирует часть сферы, радиус которой равен максимальному ожидаемому интервалу между идеальной точкой контакта по продольной оси А-А и максимальной ожидаемой контактной точкой, которая может получаться из-за углового смещения приводного штока 72. В результате механизм 34 привода поршня пипетки 30 фактически устраняет нежелательное продольное смещение приводного штока 72, увеличивая точность объема жидкости, забираемого или дозируемого.
Внешний механизм 40 для сброса наконечника и внутренний механизм 42 для сброса наконечника извлекают наконечник 130 из забирающего и дозирующего конца пипетки 30, избегая возможных загрязнений проб. Внутренний механизм 42 для сброса наконечника содержит, по меньшей мере, кнопку 140 сброса, неподвижный цилиндр 142, цилиндр 144 кнопки, корпусной цилиндр 146, шток 148, сбрасывающую пружину 150 и монтажную стяжку 152. Неподвижный цилиндр 142 крепится к корпусу 32. Монтажная стяжка 152 крепится к корпусу 32 и/или неподвижному цилиндру 142. Неподвижный цилиндр 142 и монтажная стяжка 152 остаются прикрепленными к корпусу 32. Кнопка 140 сброса крепится к цилиндру 144 кнопки. Кнопка 140 сброса может иметь возможность поворота вокруг продольной оси А-А, таким образом приспосабливаясь для удобной работы с использованием левой или правой руки пользователя. Цилиндр 144 кнопки подвижно крепится к неподвижному цилиндру 142, допуская движение цилиндра 144 кнопки в сочетании с нажатием кнопки 140 для сброса, чтобы сбрасывать наконечник 130. Корпусной цилиндр 146 крепится к цилиндру 144 кнопки. Шток 148 крепится к торцу корпусного цилиндра 146, расположенному напротив цилиндра 144 кнопки. Сбрасывающая пружина 150 крепится к корпусному цилиндру 146 первым концом 156 и к монтажной стяжке 152 вторым концом 158. Нажатие кнопки 140 сброса толкает шток 148 к наконечнику 130. Сбрасывающая пружина 150 заставляет шток 148 возвращаться в противоположном направлении, когда кнопка 140 сброса отпущена, таким образом перемещая кнопку 140 сброса назад в исходное положение. Шток 148 содержит выемку 154 на первом конце штока 148, расположенную напротив корпусного цилиндра 146.
Как показано на фиг.3, внешний механизм 40 для сброса наконечника содержит, по меньшей мере, пластину 156 для сброса и кнопку 158 регулирования пластины сброса. Пластина 156 для сброса имеет искривленный профиль, который повторяет внешнюю форму пробоотборной трубки 36. Пластина 156 для сброса имеет первый конец 160 и второй конец 162. Выступ 157 выступает из первого конца 160 пластины 156 для сброса.
Выступ 157 крепится к выемке 154 штока 148, присоединяя таким образом внешний механизм 40 для сброса наконечника к внутреннему механизму 42 для сброса наконечника. Второй конец 162 содержит охватывающий цилиндр, который скользит по пробоотборной трубке 36. В результате нажатие кнопки 140 сброса вызывает движение пластины 156 для сброса по пробоотборной трубке 36, сбрасывая вторым концом 162 наконечник 130 с пробоотборной трубки 36. Вращение ручки 158 регулировки сброса, прикрепленной к пластине 156 для сброса около первого конца 160, заставляет второй конец 162 пластины 156 для сброса перемещать вверх или вниз пробоотборную трубку 36. Регулировка местоположения пластины 156 для сброса на пробоотборной трубке 36 позволяет внешнему механизму 40 для сброса наконечника сбрасывать наконечники разных размеров.
В примере осуществления изобретения, показанном на фиг.1, 2, 16 и 17, плата 44 электронных схем управления содержит, по меньшей мере, дисплей 170, дисковый манипулятор 172, кнопку 174 уменьшения скорости, кнопку 176 увеличения скорости, кнопку 178 инверсии, кнопку 180 забора/распределения, левую кнопку 182 режима работы, правую кнопку 184 режима работы, переключатель 186 сброса, соединитель 188 внешнего источника питания и интерфейс 190 связи. Плата 44 электронных схем управления дополнительно содержит микропроцессор и другие связанные с ним электронные схемы (не показаны) для управления движением приводного штока 72 посредством привода 70 механизма 34 привода поршня.
Дисплей 170 представляет информацию пользователю на интерфейсе пользователя и позволяет пользователю определять рабочие параметры пипетки. Дисплей 170 может быть, по меньшей мере, дисплеем на тонкопленочных транзисторах (TFT), светодиодным дисплеем, жидкокристаллическим дисплеем, дисплеем на электронно-лучевой трубке и т.д. Как показано на фиг.16 и 17, для легкой доступности пользователю без прерывания работы пипетки 30 выключатель 186 сброса может быть расположен на вершине корпуса 32, противоположной наконечнику 130. Выключатель 186 сброса может позволить пользователю сбросить электронные схемы пипетки 30 в исходное состояние, если микропроцессор входит в нестабильный режим. Соединитель 188 внешнего источника питания также может быть расположен на вершине корпуса 32, противоположной наконечнику 130, для легкой доступности пользователю без прерывания работы пипетки 30. Соединитель 188 внешнего источника питания может обеспечивать заряд аккумуляторной батареи 120 и/или подавать питание для работы, например, механизма 34 привода поршня и платы 44 электронных схем управления.
Кнопка 174 уменьшения скорости уменьшает скорость забора и/или распределения жидкости в пробоотборную трубку 36 или из нее. В примере осуществления изобретения кнопка 174 уменьшения скорости уменьшает предварительную установку скорости в диапазоне от одного до пяти. В альтернативной форме осуществления изобретения кнопка 174 уменьшения скорости непосредственно уменьшает значение скорости. Кнопка 176 увеличения скорости увеличивает скорость забора и/или распределения жидкости в пробоотборную трубку 36 или из нее. В примере осуществления изобретения кнопка 176 увеличения скорости увеличивает предварительную установку скорости в диапазоне от одного до пяти. В альтернативной форме осуществления изобретения кнопка 176 увеличения скорости непосредственно увеличивает значение скорости.
Нажатие кнопки 178 инверсии заставляет инвертироваться операцию кнопки 180 забора/распределения от забора к распределению или от распределения к забору. В примере осуществления изобретения кнопка 178 инверсии разблокируется только в некоторых режимах работы, поддерживаемых пипеткой 30, или во время специальных программ, которые задаются пользователем. Нажатие кнопки 180 забора/распределения вызывает забор, распределение и/или промывку жидкости в пробоотборной трубке 36. В примере осуществления изобретения поочередные нажатия кнопки 180 забора/распределения вызывают различные результаты в зависимости от режима работы пипетки 30.
Левая кнопка 182 режима работы и правая кнопка 184 режима работы могут быть расположены с обеих сторон пипетки 30, чтобы обеспечивать удобный доступ пользователю, использующему левую или правую руку. Левая кнопка 182 режима работы и правая кнопка 184 режима работы обеспечивают пользователю один или несколько рабочих режимов использования пипетки 30. Пользователь выбирает желаемый рабочий режим путем поочередного нажатия левой кнопки 182 режима работы или правой кнопки 184 режима работы либо обеих кнопок. Пример рабочих режимов может включать, по меньшей мере, auto (автоматический), auto + mix (автоматический + смешивание), manual (ручной), repetitive (периодически повторяющийся) и program (программируемый). В режиме auto, например, пользователь может определить объем, дозируемый пипеткой, без ограничения числа заборов и/или распределений жидкости. В примере осуществления изобретения одновременное нажатие левой кнопки 182 режима работы и правой кнопки 184 режима работы может заставить дисплей 170 отображать меню выбираемых элементов. Пример элементов меню и последовательность отображения на экране дисплея показаны на фиг.20. Элементы меню могут отображаться в режиме доступа только для чтения и в режиме чтении и записи в примере осуществления изобретения. Пользователь может осуществлять навигацию между множеством элементов меню и выбирать в нем элементы для изменения, используя дисковый манипулятор 172. Кроме того, пользователь может установить элементы на различные значения, используя дисковый манипулятор 172.
В рабочем режиме auto + mix, например, пользователь может определить объем, отмеряемый пипеткой, и объем смешивания. В рабочем режиме manual, например, пользователь может использовать пипетку 30 подобно ручной пипетке без использования привода 70 для управления объемом забора/распределения. Пользователь может забирать или дозировать только часть заданного объема жидкости, разрешая выполнять забор или распределение в один или несколько этапов. В рабочем режиме repetitive, например, пользователь может определить объем для распределения. На следующем этапе пользователь может задать число объемов распределения. Например, при использовании пипетки на 100 мкл выбор объема распределения 10 мкл может разрешить до 10 поочередных распределений. Весь заданный объем забирается после первого нажатия кнопки 180 забора/распределения, и последующие нажатия кнопки 180 забора/распределения вызывают разделение выбранного объема распределения на число выбранных объемов распределения. Последующее нажатие кнопки 180 забора/распределения вызывает промывку. Новый цикл может быть начат после последующего нажатия кнопки 180 забора/распределения. В рабочем режиме program, например, пользователь может задать "программу" для выполнения микропроцессором. Программа может быть задана с помощью внешнего вычислительного устройства и принята в пипетку 30 с использованием интерфейса 190 связи, рассматриваемого со ссылкой на фиг.16-18.
Дисковый манипулятор 172 позволяем выполнять навигацию по меню и установку параметров, обеспечивая три функции: выбор параметра, увеличение параметра и уменьшение параметра. Использование дискового манипулятора 172 минимизирует число кнопок на плате 44 электронных схем управления пипетки 30, заменяя кнопку подтверждения правильности, кнопку приращения и кнопку уменьшения. Как показано на фиг.10-12, утопленный дисковый манипулятор 172 содержит, по меньшей мере, дисковое кольцо 198, опору 200 диска, диск 202, плату 204 электронных схем и ось 206. Дисковое кольцо 198 крепится к опоре 200 диска. Пользователь вращает дисковое кольцо 198, которое выступает из переднего кожуха 50 корпуса 32. В примере осуществления изобретения дисковое кольцо 198 может быть сформировано из латексного каучука. Опора 200 диска прикреплена к диску 202. Диск 202 прикреплен к оси 206, вокруг которой вращается диск 202. Ось 206 крепится к плате 204 электронных схем по существу в перпендикулярном направлении относительно первой поверхности платы 204 электронных схем.
Как поступательное движение 210, так и вращательное движение 212 дискового манипулятора 172 обнаруживаются и ретранслируются в микропроцессор платы 44 электронных схем управления через плату 204 электронных схем. В отличие от вращательного движения при поступательном движении все точки перемещающегося тела имеют в любой момент одинаковую скорость и направление движения. При вращательном движении тело вращается вокруг оси. Вращение в плоскости вызывает вращение вокруг оси, перпендикулярной плоскости вращения. Оптический датчик положения обнаруживает и преобразует информацию движения в цифровой выходной сигнал. Квадратурный импульсный датчик положения в общем может состоять из источника света, кодирующего диска и фотоприемника. Датчик модулирует луч света, интенсивность которого считывается фотоприемником, создающим два сигнала А и В, как показано на фиг.13. Сигнал В отстает по фазе от сигнала А на 90°. Датчик положения может измерять или поступательное движение, или вращательное движение. Оба типа воспринимают механическое движение и преобразуют информацию (скорость, позицию, ускорение) в электрические сигналы, которые могут использоваться для контроля перемещения. Самыми распространенными датчиками положения являются оптомеханические датчики, в которых движение механического узла кодирования, такого как кодирующий диск, прерывает оптический путь между источником света и фотоприемником. Например, кодирующий диск может содержать одну или несколько щелей на поверхность диска. Источником света может быть светодиод. Оптическим датчиком может быть фотоприемник.
Фотоприемник может прикрепляться к плате 204 электронных схем, обнаруживать движение вращающегося диска 202 и передавать информацию о вращательном движении на плату 204 электронных схем. В примере осуществления изобретения фотоприемник является инфракрасным фотоприемником. Как известно специалистам в данной области техники, другие средства детектирования могут быть объединены с дисковым манипулятором 172, чтобы обнаруживать вращательное движение диска 202. Диск 202 и плата 204 электронных схем могут располагаться так, чтобы вращение 212 диска 202 одновременно генерировало сигнал А и сигнал В, например, как показано на фиг.13. Каждый сигнал может состоять из периода двух "включено" (1) и затем двух "выключено" (0). На фиг.14 показана таблица поочередных значений для каждого сигнала, даваемого вращением дискового манипулятора 172 в положительном направлении. На фиг.15 показана таблица поочередных значений для каждого сигнала, даваемого вращением дискового манипулятора 172 в отрицательном направлении. Таким образом, определяя предыдущее значение для каждого сигнала А и В и текущее значение для каждого сигнала А и В, можно определить направление вращения дискового манипулятора 172 путем сравнения с таблицами фиг.14 и 15. Таким образом, значение 1 предыдущего сигнала А и предыдущее значение 1 сигнала В, а также значение 0 текущего сигнала А и текущее значение 1 сигнала В указывают положительное вращение дискового манипулятора 172. Наоборот, значение 1 предыдущего сигнала А и предыдущее значение 1 сигнала В и значение 1 текущего сигнала А и текущее значение 0 сигнала В означают вращение дискового манипулятора 172 в отрицательном направлении. Таким образом, дисковый манипулятор 172 может содержать датчик углового положения, который использует квадратурное кодирование.
К плате 204 электронных схем может быть прикреплен датчик перемещения, чтобы обнаруживать поступательное перемещение 210 диска 202, создаваемое, когда пользователь нажимает на дисковый манипулятор 172. Например, в примере осуществления изобретения датчик перемещения может содержать пружину 208, которая прикреплена к оси 206 и заставляет диск 202 возвращаться в свое исходное положение после того, как пользователь отпускает дисковый манипулятор 172. Перемещение пружины 208 может создавать "импульс", который обнаруживается платой 204 электронных схем. Как известно специалистам в данной области техники, другие средства обнаружения могут быть объединены с дисковым манипулятором 172 для обнаружения поступательного перемещения диска 202.
Пипетка 30 может измерять частоту вращения вращающегося диска 202, когда он перемещается пользователем. Вращающийся диск 202 может быть разделен на определенное число сегментов, которые соответствуют угловой мере колеса. Например, четыре сектора соответствуют угловой мере 90°. Шесть секторов соответствуют угловой мере 60°. Число переходов секторов при вращении вращающегося диска 202, когда он вращается пользователем, подсчитывается. При вращении вращающегося диска 202 пользователь может "чувствовать" каждый переход сектора. Микропроцессор измеряет период времени, необходимый вращающемуся диску 202 для осуществления поворота на некоторый угол, вычисляя таким образом частоту вращения. Например, для вычисления частоты вращения может использоваться время выполнения двух последовательных оборотов. На основании измеренного периода времени микропроцессор может изменять величину приращения для параметра, который в настоящее время изменяется пользователем. Например, если период меньше пятнадцати миллисекунд, микропроцессор может увеличивать параметр на 100. Если период больше пятнадцати миллисекунд, но меньше двадцати пяти миллисекунд, микропроцессор может увеличивать параметр на 10. Если период больше двадцати пяти миллисекунд, микропроцессор может увеличивать параметр на 10. Таким образом, чем быстрее пользователь вращает дисковый манипулятор 172, тем быстрее увеличивается или уменьшается параметр, устанавливаемый пользователем. Наоборот, если вращение дискового манипулятора 172 медленное, микропроцессор подает команду на более медленное изменение параметра. Значения приращения и пороги для изменения значений приращения могут изменяться.
Пример функций, которые могут выполняться с использованием дискового манипулятора 172 посредством информации, отображаемой для пользователя на дисплее 170, включает, по меньшей мере, следующие функции.
- Установка объема для забора или распределения нажатием дискового манипулятора 172 для разблокировки установки объема, вращением дискового манипулятора 172 для установки объема и нажатием дискового манипулятора 172 для блокировки установки объема.
- В режиме работы пипетки "auto + mix" могут быть выбраны два объема. Первый объем - объем, дозируемый пипеткой, а второй объем - объем для смешивания. Объемы могут задаваться последовательно.
- В режиме работы пипетки "repetitive" устанавливается объем для распределения пипеткой. После установки объема максимальное число заборов или распределений может быть отображено пользователю на дисплее 170. Это число может быть уменьшено вращением дискового манипулятора 172 и его нажатием для выбора числа заборов или распределений.
- Навигация по меню, отображаемому на дисплее 170, осуществляется вращением дискового манипулятора 172 для перемещения курсора вверх или вниз и нажатием на этот дисковый манипулятор 172 для выбора элемента меню.
- Установка имени для персонализации (имени оператора, названия отдела или любой другой информации, задаваемой 20 символами) пипетки 30 вращением дискового манипулятора 172 для нахождения символа и нажатием дискового манипулятора 172 для выбора символа. Символы могут включать, например, буквы от А до Z, цифры от 0 до 9, /, пробел и *. Символ * может означать, что пользователем был выбран последний символ. Каждый символ может задаваться последовательно.
- Установка числа циклов, числа недель или даты до следующего обслуживания пипетки 30 путем вращения дискового манипулятора 172 для задания параметра и нажатием дискового манипулятора 172 для установки значения. Когда выбранный параметр достигается, на дисплее 170 может быть отображено сообщение для напоминания пользователю о необходимости обслуживания пипетки.
- Ввод в пипетку 30 значений коррекции для стандартной регулировки
- путем ввода в пипетку 30 результатов гравиметрического испытания при минимальном объеме посредством нажатия дискового манипулятора 172 для разрешения установки объема, вращения дискового манипулятора 172 для установки объема и нажатия дискового манипулятора 172 для сохранения изменения,
- путем ввода в пипетку 30 результатов гравиметрического испытания при 50% объема посредством нажатия дискового манипулятора 172 для разрешения установки объема, вращения дискового манипулятора 172 для установки объема и нажатия дискового манипулятора 172 для сохранения изменения и
- путем ввода в пипетку 30 результатов гравиметрического испытания при 100% объема посредством нажатия дискового манипулятора 172 для разрешения установки объема, вращения дискового манипулятора 172 для установки объема и нажатия дискового манипулятора 172 для сохранения изменения.
- Ввод в пипетку 30 значений быстрой регулировки для стандартной регулировки
- путем ввода в пипетку 30 объема для быстрой регулировки посредством нажатия дискового манипулятора 172 для разблокирования установки объема, вращения дискового манипулятора 172 для установки объема и нажатия дискового манипулятора 172 для сохранения изменения и
- путем ввода в пипетку 30 результатов гравиметрического испытания при выбранном объеме посредством нажатия дискового манипулятора 172 для разблокирования установки объема, вращения дискового манипулятора 172 для установки объема и нажатия дискового манипулятора 172 для сохранения изменения.
- Включение и выключение звукового сигнализатора нажатием дискового манипулятора 172 для разблокирования установки функции, вращением дискового манипулятора 172 для выбора функции и нажатием дискового манипулятора 172 для блокирования выбора.
- Установка дополнительного и/или максимального объема для забора или распределения нажатием дискового манипулятора 172 для разблокирования установки параметра, вращением дискового манипулятора 172 для выбора параметра и нажатием дискового манипулятора 172 для блокирования установки параметра.
- Подтверждение правильности изменения для параметра пипетки 30 после установки некоторых значений и перед осуществлением выхода из меню поворотом дискового манипулятора 172 на YES (ДА) или NO (НЕТ) и нажатием дискового манипулятора 172 для выбора ответа.
- Выбор ответа на сообщение, информирующего пользователя о необходимости выполнения обслуживания, вращением дискового манипулятора 172 для ввода меню обслуживания или для установки более позднего напоминания и нажатием дискового манипулятора 172 для выбора действия.
Как показано на фиг.18, система 220 может содержать, по меньшей мере, пипетку 30 и вычислительное устройство 230. Интерфейс 190 связи позволяет пипетке 30 обмениваться данными с вычислительным устройством 230. Вычислительное устройство 230 может быть компьютером любого форм-фактора, включая настольный, портативный, карманный и т.д. Вычислительное устройство 230 физически отделено от пипетки 30. Интерфейс 190 связи может быть расположен на верхней части корпуса 32, противоположной наконечнику 130, для обеспечения легкой доступности пользователю без прерывания управления пипеткой 30, как показано на фиг.16 и 17. Связь между пипеткой 30 и вычислительным устройством 230 может использовать различные технологии передачи, включая, по меньшей мере, множественный доступ с кодовым разделением каналов (CDMA), глобальную систему мобильной связи (GSM), универсальную систему мобильной связи (UMTS), множественный доступ с временным разделением каналов (TDMA), протокол управления передачей/межсетевой протокол (TCP/IP), службу передачи коротких сообщений (SMS), службу передачи мультимедийных сообщений (MMS), электронную почту, службу мгновенной передачи сообщений (IMS), Bluetooth, IEEE 802.11 и т.д. Пипетка 30 и вычислительное устройство 230 могут обмениваться данными, используя различную среду, включая, по меньшей мере, радиосвязь, инфракрасную, лазерную связь, кабельное соединение и т.д. Таким образом, интерфейс 190 связи может использовать проводное соединение 192 и/или беспроводное соединение 194.
Проводное соединение 192 может содержать первый конец, который соединяется с интерфейсом 190 связи пипетки 30, и второй конец, который соединяется с интерфейсом 234 связи вычислительного устройства 230. В примере осуществления изобретения интерфейс 190 связи пипетки 30 соответствует стандартам мини IEEE 1394. В примере осуществления изобретения интерфейс 234 связи вычислительного устройства 230 может быть интерфейсом типа RS 232, который предназначен для использования соединителя USB (универсальной последовательной шины). В альтернативной форме осуществления изобретения интерфейс 190 связи пипетки 30 и/или интерфейс 234 связи вычислительного устройства 230 могут быть интерфейсом локальной сети Ethernet.
Интерфейсы беспроводной связи могут осуществлять связь между устройствами на различные расстояния, от коротких до длинных. Пипетка 30 и вычислительное устройство 230 могут поддерживать обработку данных для передачи и приема сигналов беспроводной связи. Сигналы беспроводной связи могут использовать, например, стандарт IEEE 802.11™, применяя любую версию 802.11а, 802.11b, 802.11f или 802.11g. Кроме того, сигналы беспроводной связи могут использовать, например, стандарт BLUETOOTH, последней версией которого является IEEE 802.15.1. Спецификации IEEE 802.11(определяют стандарты беспроводной связи для беспроводных локальных радиосетей (WLAN), которые обеспечивают интерфейс "по эфиру" между абонентом радиосети и базовой станцией или точкой доступа, а так же как между другими абонентами радиосети. Рабочая группа IEEE 802.15 предоставляет стандарты для персональных радиосетей малой сложности и с низким энергопотреблением (PANs), таких как поддерживаемые спецификацией Bluetooth.
Как показано на фиг.19, в примере осуществления изобретения вычислительное устройство 230 может содержать, по меньшей мере, дисплей 232, интерфейс 234 связи, входной интерфейс 236, память 238, процессор 240 и модуль 242 управления пипеткой. Дисплей 232 представляет информацию пользователю вычислительного устройства 230 и позволяет пользователю задавать рабочие характеристики пипетки 30 при помощи большого дисплея и входного интерфейса 236 вычислительного устройства 230 вместо дисплея и интерфейса, предусмотренных на плате 44 электронных схем управления. Дисплей 232 может быть, по меньшей мере, дисплеем на тонкопленочных транзисторах (TFT), светодиодным дисплеем, жидкокристаллическим дисплеем, дисплеем на электронно-лучевой трубке и т.д. Входной интерфейс 236 обеспечивает интерфейс для приема информации от пользователя для ввода в вычислительное устройство 230. Входной интерфейс 236 может использовать различные технологии ввода, включая, по меньшей мере, клавиатуру, перьевой указатель с сенсорным дисплеем, мышь, шаровой манипулятор, сенсорный экран, блок клавиш, одну или несколько кнопок и т.д., чтобы позволить пользователю вводить информацию в вычислительное устройство 230 или делать выбор. Входной интерфейс 236 может обеспечивать оба интерфейса ввода и вывода. Например, сенсорный экран позволяет пользователю осуществлять ввод данных и представляет выводимые данные пользователю.
Память 238 может быть местом электронного хранения данных для операционной системы вычислительного устройства 230 и/или модуля 242 управления пипеткой так, чтобы информация могла быть быстро доступной процессору 240. Вычислительное устройство 230 может иметь множество блоков 238 памяти, использующих различные технологии памяти, включая, по меньшей мере, оперативную память (RAM), постоянное запоминающее устройство (ROM), флэш-память и т.д.
Процессор 240 выполняет команды, которые заставляют вычислительное устройство 230 выполнять различные функции. Команды могут быть написаны с использованием одного или нескольких языков программирования, языка сценариев, ассемблера и т.д. Кроме того, команды могут выполняться специализированным компьютером, логическими схемами или аппаратными средствами. Таким образом, процессор 240 может быть реализован в виде аппаратных средств, встроенных программных средств, программных средств или любой комбинации этих способов. Термин "выполнение" относится к процессу выполнения приложения, программы или модуля либо выполнения операции, которую запрашивает команда. То, что процессор 240 выполняет модуль, означает, что он выполняет операции, которые запрашивает этот модуль в форме последовательностей команд. Процессор 240 может извлекать приложение из энергонезависимой памяти, которая является в общем некоторой формой постоянного запоминающего устройства, или флэш-памяти и может копировать команды в исполняемой форме во временную память, которая является в общем некоторой формой оперативной памяти. Процессор 240 может выполнять команды, включенные, например, в модуль 242 управления пипеткой. Вычислительное устройство 200 может содержать один или несколько процессоров 240.
Модуль 242 управления пипеткой - это организованный набор команд, которые, когда выполняются, позволяют пользователю создавать программу для ее выполнения пипеткой 30. Программа задает операции для выполнения пипеткой 30. Модуль 242 управления пипеткой может быть написан с использованием одного или нескольких языков программирования, ассемблера, языка сценариев и т.д. Термин "выполнение" представляет собой процесс выполнения команд, которые запрашивает модуль 242 управления пипеткой. Для выполнения модуля 242 управления пипеткой приложение может транслироваться на машинный язык, который понимает вычислительное устройство 230. Запуск модуля 242 управления пипеткой вообще влечет за собой его извлечение в исполняемой форме (в виде загрузочного модуля) из постоянного запоминающего устройства и копирование исполняемой программы в рабочее запоминающее устройство, как правило, в некоторый вид оперативной памяти. Постоянное запоминающее устройство памяти может быть, по меньшей мере, жестким диском, гибким диском, компакт-диском, предназначенным только для чтения, и т.д.
Пипетка 30 может передавать информацию в вычислительное устройство 230 и принимать информацию из него. Выбор рабочего режима program ("программа") заставляет пипетку 30 выполнять программный модуль, заданный пользователем в вычислительном устройстве 230 с помощью модуля 242 управления пипеткой и переданный в пипетку 30 через интерфейс 234 связи. Модуль 242 управления пипеткой передает программный модуль в пипетку 30, используя интерфейс 234 связи. Пипетка 30 принимает программный модуль, используя интерфейс 190 связи. Программный модуль содержит операции, которые будут выполнены микропроцессором пипетки 30 после того, как пользователь переведет пипетку 30 в рабочий режим program. Например, программный модуль может быть таблицей команд для пипетки 30. В качестве другого варианта программный модуль может содержать слово или символ, сопровождаемый значением параметра. Язык обмена данными может быть разработан для задания операций, которые будут выполняться пипеткой 30. Язык обмена данными может быть подобен тем, которые используют теги, такие как язык разметки гипертекста (HTML) или расширяемый язык разметки (XML). Для выполнения программного модуля, который содержит рабочие команды для пипетки, пипетка 30 устанавливается в программный режим, используя левую кнопку 182 режима работы или правую кнопку 184 режима работы.
Модуль 242 управления пипеткой из вычислительного устройства 230 позволяет пользователю легко создавать сложные операции управления пипеткой, используя дисплей 232 и входной интерфейс 236 вычислительного устройства 230 вместо компонентов интерфейса пипетки 30, описанных со ссылкой на фиг.1, 2 и 10. Например, модуль 242 управления пипеткой обеспечивает функции, которые включают, по меньшей мере:
- Модификацию программного обеспечения, установленного в пипетке 30. Например, новая версия программы может быть послана пользователю с использованием компакт-диска или цифрового диска DVD, по сети Internet и т.д., и пользователь может установить новую версию программы в пипетку 30 из вычислительного устройства 230.
- Ввод серийного номера в пипетку 30. Серийный номер может быть введен в пипетку 30 после изготовления, а также может быть выгравирован на корпусе 32 пипетки.
- Калибровку пипетки 30 во время изготовления пипетки 30. Несколько типовых объемов жидкости забираются в пипетку 30, дозируются из пипетки 30 и измеряются. Измеренные значения вводятся в пипетку 30.
- Автоматизацию, например, шести этапов изготовления, необходимых после сборки пипетки 30, включая
- сохранение данных пипетки, которые указывают тип пипетки, например, одноканальная пипетка, восьми- или двенадцатиканальная пипетка, номинальный объем пипетки и т.д.,
- сохранение гравиметрических данных для калибровки пипетки 30, как указано выше,
- преобразование веса в объем и вычисление среднего значения, среднеквадратического отклонения и т.д.,
- добавление значений объема в пипетку 30,
- модификация сохраненных гравиметрических данных, используемых для калибровки пипетки 30, как указано выше, и сохранение серийного номера, как указано выше.
- Пересылку данных из пипетки в вычислительное устройство 230 для анализа и для изменения и последующей пересылки обратно в пипетку 30 из вычислительного устройства 230. Примеры данных могут содержать, по меньшей мере,
- серийный номер,
- идентификатор пипетки и номер версии,
- число операций пипетки, которые необходимо выполнить до достижения номинального полного количества операций распределения жидкости пипеткой 30,
- число операций пипетки, выполненных после последней операции обслуживания,
- число операций пипетки, выполненных после отправки пипетки 30 с завода,
- дату последнего технического обслуживания,
- данные калибровки, относящиеся к заданному объему и фактически измеренному объему, и
- параметры калибровки, включая объем, измеренный при минимальном объеме; объем, измеренный при 50% максимального объема, и объем, измеренный при 100% максимального объема.
- Задание пользовательских программ для выполнения пипеткой в режиме работы program ("программа"). Пользователь может задать заказную программу, выбирая и организуя элементарные задачи, чтобы создать программный модуль, который передается в пипетку 30 через интерфейс 190 связи. Пользователь задает заказную программу, используя вычислительное устройство 230. Эти задачи, вообще, имеют параметры настройки. Примеры задач и параметры настройки определены ниже.
- Забор воздуха. Задается последовательность объемов забора воздуха через пипетку 30. В течение этой процедуры модуль 242 управления пипеткой отображает на дисплее 232 название, значение объема воздуха для забора и скорость забора. В примере осуществления изобретения пользователь может задать скорость из заданного числа имеющихся скоростей, определенных по умолчанию для пипетки 30. Например, по умолчанию могут быть определены пять скоростей. Пользователем может быть задано название для описания задачи, и оно может, например, иметь максимальную длину в пятнадцать символов. По умолчанию название задачи может быть air aspiration ("забор воздуха") или air gap ("воздушный зазор").
- Аварийная сигнализация. Несколько звуковых сигналов могут выдаваться звуковым генератором пипетки 30, чтобы уведомить пользователя об особой точке в работе, даже если звуковой генератор дезактивирован пользователем. Например, могут быть выданы два звуковых сигнала с интервалом около 500 миллисекунд.
- Забор. Пользователь может задать следующие параметры: объем, который будет забираться, скорость забора для этого объема и название задачи. По умолчанию название задачи может быть aspiration ("забор") или aspirate ("забрать").
- Разбавление. Пользователь может задать следующие параметры: объем всасываемого воздуха или воздушный зазор между каждой пробой жидкости, объем каждой жидкости для забора, скорость забора каждой жидкости, название каждой из 2-5 жидкостей, предназначенное для отображения на дисплее 170 пипетки 30, и название задачи. При отсутствии названия каждой из этих двух-пяти жидкостей может быть отображен объем забора.
- Распределение. Пользователь может задать следующие параметры: объем для распределения, скорость распределения для этого объема и название задачи. По умолчанию название задачи может быть dispensation ("распределение") или dispense ("распределять").
- Ручной режим. Использование задачи aspiration ("забор") и dispensation ("распределение"), нажатие кнопки 180 забора/распределения забирает или сбрасывает полный объем. При использовании ручного режима забор или распределение происходят только тогда, когда пользователем обеспечивается нажатие на кнопку 180 забора/распределения. Поэтому забор или распределение заданного объема могут осуществляться в несколько этапов. Может быть задано название задачи, которое отображается на дисплее 170 пипетки. Могут быть заданы несколько видов задач ручного режима:
- Вид ручного режима, в котором задаются объем жидкости и скорость забора, а использование кнопки 178 инверсии позволяет изменить направление работы.
- Вид ручного режима - только забор, в котором задаются объем забора, скорость забора и скорость распределения, а использование кнопки 178 инверсии позволяет завершить процедуру.
- Вид ручного режима - только распределение, в котором задаются объем распределения и скорость распределения, а использование кнопки 178 инверсии позволяет завершить процедуру.
- Перемешивание. Процедура перемешивания включает в себя жидкость, которая забирается и дозируется заданное число раз для перемешивания пробы. Пользователь может задать следующие параметры: объем смеси, скорость забора, скорость распределения, число циклов перемешивания, которое должны быть выполнено, например, между 1 и 99 включительно, и название задачи. По умолчанию название задачи может быть "смешивать" или "перемешивание". После того, как число циклов выполнено, пипетка 30 ожидает отпускания кнопки 180 забора/распределения, чтобы остановить цикл перемешивания.
- Нормальная. При выборе нормальной задачи пипетке 30 посылается команда переключиться с запрограммированной задачи в режим стандартного управления пипеткой после нажатия пользователем кнопки 178 инверсии.
- Пауза. Выбор задачи пауза останавливает работу в заданном режиме или выполнение запрограммированной задачи на какое-то время, определяемое пользователем. Пользователь может задавать следующие параметры: время и название задачи. Время может задаваться, например, между 0 и 999,9 секунды с шагом 0,1 секунды.
- Промывка. Выбор задачи промывки вызывает перемещение поршня, обеспечивающее удаление всей жидкости из пробоотборной трубки 36. Пользователь может задавать название задачи. Могут быть различные виды промывки.
- Многократный забор. Задача выполняет заранее установленное число заборов, причем каждый забор имеет свой объем и скорость забора. После каждого забора может быть задана пауза или на период времени, или до тех пор, пока не нажата кнопка 180 забора/распределения. Пользователь может задавать следующие параметры: число заборов, объем, забираемый при каждом заборе, скорость забора для каждого забираемого объема, название для каждого забираемого объема, вид паузы, которая следует за забором каждого объема, и название задачи.
- Многократное распределение. Задача выполняет заранее установленное число распределений с каждым распределением, имеющим свой объем и скорость распределения. После каждого распределения может быть задана пауза или на период времени, или до тех пор, пока не нажата кнопка 180 забора/распределения. Пользователь может задавать следующие параметры: число распределений, объем, дозируемый при каждом распределении, скорость распределения для каждого дотируемого объема, название для каждого дозируемого объема, вид паузы, которая следует за распределением каждого объема, и название задачи.
- Реверсирование. Выбор задачи реверсирования инвертирует работу пипетки. В течение нормальной работы происходит забор жидкости до тех пор, пока не забирается необходимый объем, распределение жидкости вызывает выдачу этого объема, за которым следует дополнительная промывка, чтобы обеспечить, чтобы вся жидкость была распределена. Наоборот, в обратном режиме забираются заданный объем и дополнительный объем. Без остановки за забором следует распределение половины дополнительного объема. Нажатие кнопки 180 забора/распределения снова вызывает распределение количества жидкости, равного необходимому объему, без распределения дополнительной половины дополнительного объема, остающейся в пробоотборной трубке 36. Остающийся дополнительный объем дозируется во время промывки.
- Ожидание. Выбор задачи ожидания останавливает ход выполнения задачи на все время, когда пользователь нажимает кнопку 180 забора/распределения, или на все время до тех пор, пока пользователь не нажмет кнопку 180 забора/распределения.
- Интегрирование новых режимов в пипетку 30.
- Калибровка пипетки пользователем. Пользователь измеряет объемы, эффективно удаленные при предоставлении трех заданных объемов для пипетки 30, например, минимального объема, объема при 50% максимального объема и объема при 100% максимального объема. Пипетка может самокалиброваться после того, как пользователь передает значение объемов, измеренных для соответствующих проб пипеткой 30. Модуль 242 управления пипеткой решает одно или несколько уравнений для соответствующих объемов. Во время использования пипетки 30 каждое уравнение позволяет микропроцессору пипетки 30 вычислить скорректированное значение для объема. Скорректированное значение отображается на дисплее 170, когда пипетка используется пользователем. Фактически ручная подстройка забираемого значения приводит к передаче необработанного значения в микропроцессор, который применяет соответствующее уравнение или матрицу, чтобы получить скорректированное значение.
- Калибровка с использованием одной точки. Пользователь может калибровать пипетку 30 с помощью объема, который он часто использует. Пользователь задает объем и выполняет забор и распределение. Пипетка 30 может самокалиброваться изложенным выше способом.
- Обеспечение информацией о техническом обслуживании. Следующие параметры могут считываться из пипетки 30: дата последнего обслуживания, общее число выполненных отборов проб, число операций пипетки, начиная с последнего обслуживания, значение предела объема, если он был задан ниже, чем номинальный объем пипетки, значения, используемые для калибровки, и значения, используемые для одноточечной калибровки. Следующие параметры могут быть записаны для пипетки 30: дата следующего обслуживания, предельное значение объема, значения, используемые для калибровки, и значения, используемые для одноточечной калибровки.
В альтернативных формах осуществления изобретения с использованием модуля 242 управления пипеткой могут задаваться дополнительное или меньшее количество операций либо другие операции. Например, при задании режима работы auto в программном модуле пользователь может дополнительно выбирать среди различных опций забора/распределения/промывки. Например, в примере осуществления изобретения пользователь имеет выбор из трех опций забора/распределения/промывки. В первой опции пипетка останавливается после распределения жидкости и перед промывкой. Во второй опции пипетка дозирует жидкость и производит промывку без остановки. В третьей опции пипетка эксплуатируется классическим способом, при котором жидкость забирается после первого нажатия кнопки 180 забора/распределения, жидкость дозируется после второго нажатия кнопки 180 забора/распределения без ее отпускания и жидкость промывает пипетку после отпускания кнопки 180 забора/распределения и третьего нажатия этой кнопки 180 забора/распределения.
Должно быть понятно, что изобретение не ограничивается частными формами его осуществления, изложенными здесь для пояснения изобретения, но охватывает все такие изменения, комбинации и перестановки, которые входят в объем приведенной ниже формулы изобретения. Специалистам в данной области техники будет ясно, что устройство и способы данного изобретения могут успешно работать на различных платформах, используя различные операционные системы, включая, по меньшей мере, операционную систему на основе Microsoft® Windows, операционную систему на основе Macintosh®, операционную систему на основе LINUX, операционную систему на основе UNIX и т.д. Сверх того, описанная функциональность может быть распределена между модулями, которые отличаются по числу и распределению функций от описанных здесь, не отклоняясь от сущности изобретения. Кроме того, порядок выполнения модулей может быть изменен без отклонения от сущности изобретения. Таким образом, описание предпочтительных форм осуществления изобретения приведено с целью пояснения изобретения, а не ограничения его объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ТОЧНОГО ИЗМЕРЕНИЯ ЖИДКОСТИ В ПИПЕТКЕ ДЛЯ ВЗЯТИЯ ПРОБ ЖИДКОСТИ | 2004 |
|
RU2353426C2 |
| УСТРОЙСТВО ОТБОРА ПРОБ ЖИДКОСТИ | 1998 |
|
RU2139513C1 |
| СИСТЕМЫ И СПОСОБЫ МНОГОСТОРОННЕГО АНАЛИЗА | 2012 |
|
RU2627927C2 |
| Многодозовая пипетка | 1980 |
|
SU1088650A3 |
| РЕГУЛИРУЕМАЯ ПИПЕТКА | 2000 |
|
RU2252408C2 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ УВЕДОМЛЕНИЙ СИСТЕМНОГО УРОВНЯ В МУЛЬТИМЕДИЙНОЙ КОНСОЛИ | 2006 |
|
RU2408085C2 |
| УСТРОЙСТВО ДЛЯ РАБОТЫ С ЖИДКОСТЬЮ И СПОСОБ СНАБЖЕНИЯ ЭНЕРГИЕЙ УСТРОЙСТВА ДЛЯ РАБОТЫ С ЖИДКОСТЬЮ | 2019 |
|
RU2784973C2 |
| ТАКТИЛЬНО КОРРЕЛИРОВАННЫЕ ГРАФИЧЕСКИЕ ЭФФЕКТЫ | 2017 |
|
RU2706182C1 |
| СИСТЕМА ВВЕДЕНИЯ ЖИДКОСТИ, ИМЕЮЩАЯ РАЗЛИЧНЫЕ СИСТЕМЫ ДЛЯ УПРАВЛЕНИЯ ПРОЦЕДУРОЙ ИНЪЕКЦИИ | 2012 |
|
RU2618159C2 |
| БЫСТРАЯ ИНИЦИАЛИЗАЦИЯ И ВКЛЮЧЕНИЕ ДИСПЛЕЯ | 2007 |
|
RU2427031C2 |











Изобретение относится к области приборостроения и может быть использовано при фармацевтических исследованиях, исследованиях по геномике и протеомике, биологических исследованиях, в лабораториях, разрабатывающих лекарства. Техническим результатом является упрощение выбора рабочих параметров и сокращение времени, необходимого для изменения установочных параметров в устройстве, и возможность обеспечения управления с помощью одной руки. В электронной пипетке обеспечивается управление набором и распределением жидкости. Электронная пипетка содержит вычислительное устройство. Вычислительное устройство содержит модуль управления пипеткой и первый интерфейс связи. Модуль управления пипеткой определяет операцию для выполнения в пипетке. Первый интерфейс связи передает пипетке электрические сигналы, которые определяют операцию для выполнения в пипетке. Пипетка содержит пробоотборную трубку, поршневой узел, механизм привода поршня, второй интерфейс связи и микропроцессор. Поршневой узел крепится к пробоотборной трубке и содержит шток поршня, который вставлен в пробоотборную трубку. Механизм привода поршня содержит приводной шток, имеющий поверхность, которая входит в контакт с поршневым узлом. Механизм привода поршня перемещает шток поршня поршневого узла в пробоотборной трубке, таким образом обеспечивая регулирование жидкости в пробоотборной трубке. Второй интерфейс связи принимает электрические сигналы от вычислительного устройства. Микропроцессор управляет механизмом привода поршня и выполняет операцию, определяемую электрическими сигналами. 7 н. и 19 з.п. ф-лы, 20 ил.
| МНОГОКАНАЛЬНОЕ ПИПЕТИРУЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2179887C1 |
| Автоматическая бюретка-дозатор | 1989 |
|
SU1677623A2 |
| US 6254832 А1, 03.07.2001 | |||
| DE 19850417 A1, 11.05.2000 | |||
| Устройство для коммутации в энергосистемах переменного тока | 1979 |
|
SU864364A1 |
| Способ укладки дренажных труб в железнодорожных насыпях или откосах | 1937 |
|
SU51738A1 |

