Изобретение относится к радиосвязи и может быть использовано для демодуляции амплитудно-манипулированных и амплитудно-модулированных сигналов.
Все известные способы демодуляции амплитудно-модулированных сигналов (АМС) состоят из выполнения следующих операций. От источника АМС подают на нелинейный элемент, с его помощью разрушают спектр АМС на высокочастотные и низкочастотные составляющие. С помощью фильтра нижних частот (ФНЧ) выделяют низкочастотные составляющие колебания, амплитуда которых изменяется по закону изменения огибающей АМС. С помощью разделительной емкости, включенной в продольную цепь, устраняют постоянную составляющую и низкочастотную переменную составляющую подают на нагрузку.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является устройство демодуляции амплитудно-модулированных сигналов, состоящее в том, что амплитудно-модулированный сигнал подают на демодулятор из параллельно или последовательно включенного полупроводникового диода к фильтру низких частот [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. Принцип действия устройства состоит в том, что с помощью нелинейного элемента (диода) разрушается спектр амплитудно-модулированного сигнала (АМС) на высокочастотные и низкочастотные составляющие. Последние выделяются с помощью фильтра нижних частот и поступают в нагрузку. При необходимости между источником модулированных сигналов и нелинейным элементом или между нелинейным элементом и нагрузкой включают реактивный или резистивный четырехполюсник для согласования и дополнительной селекции сигнала и помехи. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного амплитудно-модулированного колебания. Недостаток устройства состоит в том, что при прохождении АМС через указанную цепь глубина модуляции уменьшается, причем чем уже полоса пропускания контура, т.е. чем лучше помехоустойчивость, тем глубина модуляции уменьшается на большую величину. Кроме того, неизвестны абсолютные значения амплитуд низкочастотного колебания в крайних его состояниях. Значения амплитуд определяются абсолютными значениями модулей коэффициентов передачи в двух состояниях и амплитудами входного сигнала. Абсолютные значения модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного АМС, также неизвестны.
Указанный недостаток связан с тем, что в традиционной теории радиотехнических цепей указанный выше четырехполюсник не оптимизируется по критерию обеспечения заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного АМС. Не оптимизируется также место включения нелинейного элемента. Это связано с тем, что в традиционной теории нелинейный элемент считается безынерционным, т.е. не имеющим внутренних емкостей и индуктивностей.
Техническим результатом изобретения является обеспечение заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного АМС. Возможность выбора места включения нелинейного элемента обеспечивает повышение возможности физической реализуемости и увеличения рабочей полосы частот.
1. Указанный результат достигается тем, что в устройстве демодуляции амплитудно-модулированных сигналов, состоящем из каскадно-соединенных четырехполюсника, нелинейного элемента, фильтра нижних частот, последовательно включенной разделительной емкости и низкочастотной нагрузки, дополнительно в качестве нелинейного элемента выбран двухполюсный нелинейный элемент, который включен между четырехполюсником и высокочастотной нагрузкой в продольную цепь (последовательно), к высокочастотной нагрузке подключен фильтр нижних частот, четырехполюсник выполнен из числа резистивных двухполюсников, не меньшего трех, значения параметров которых выбраны из условия обеспечения заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного амплитудно-модулированного сигнала, путем использования следующих математических выражений:
где 

 а, b, с, d - элементы классической матрицы передачи четырехполюсника;
а, b, с, d - элементы классической матрицы передачи четырехполюсника;




 1<m<mгр или mгр<m<1;
1<m<mгр или mгр<m<1;
z1,2=rД1,Д2+jxД1,Д2 - заданные значения сопротивлений управляемого двухполюсного элемента в двух состояниях (1 и 2), определяемых двумя крайними уровнями низкочастотного управляющего сигнала; zн=rн+jxн, zо=rо+jxо - заданные комплексные сопротивления нагрузки и источника сигнала; m1 - значение модуля коэффициента передачи в первом состоянии нелинейного элемента, при котором обеспечивается физическая реализуемость четырехполюсника; m2 - значение модуля коэффициента передачи во втором состоянии нелинейного элемента; m - заданное значение отношение модулей коэффициентов передачи m1 и m2.
2. Указанный результат достигается тем, что в устройстве демодуляции амплитудно-модулированных сигналов по п.1 резистивный четырехполюсник выполнен в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое Г-образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе Г-образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значение сопротивления r1 выбирается из условия обеспечения физической реализуемости сопротивлений r2, r3, r4.
3. Указанный результат достигается тем, что в устройстве демодуляции амплитудно-модулированных сигналов по п.1 резистивный четырехполюсник выполнен в виде двух каскадно-соединенных  -образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значение сопротивления r4 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r3.
4. Указанный результат достигается тем, что в устройстве демодуляции амплитудно-модулированных сигналов по п.1 резистивный четырехполюсник выполнен в виде двух каскадно-соединенных П-образных соединений трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников, резистивные сопротивления r1, r2, r3 двухполюсников, составляющих П-образное соединение, и резистивные сопротивления r4, r5 двухполюсников, составляющих -образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значения сопротивлений r3 и r5 выбираются из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
5. Указанный результат достигается тем, что в устройстве демодуляции амплитудно-модулированных сигналов по п.1 резистивный четырехполюсник выполнен в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников, резистивные сопротивления r1, r2, r3, r4 двухполюсников, составляющих перекрытое Т-образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значение сопротивления r3 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
На фиг.1 показана схема устройства демодуляции амплитуды радиочастотных сигналов (прототип).
На фиг.2 показана структурная схема предлагаемого устройства по п.1.
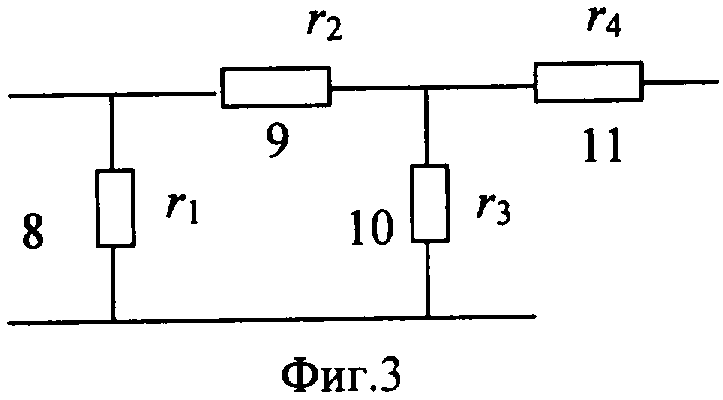
На фиг.3 приведена схема четырехполюсника по п.2, входящая в предлагаемое устройство.
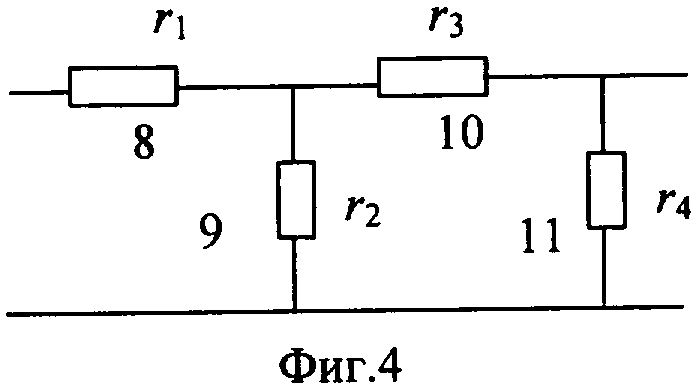
На фиг.4 приведена схема четырехполюсника по п.3, входящая в предлагаемое устройство.
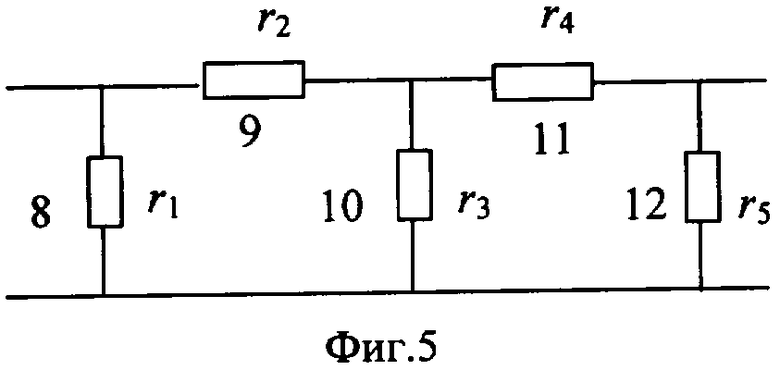
На фиг.5 приведена схема четырехполюсника по п.4, входящая в предлагаемое устройство.
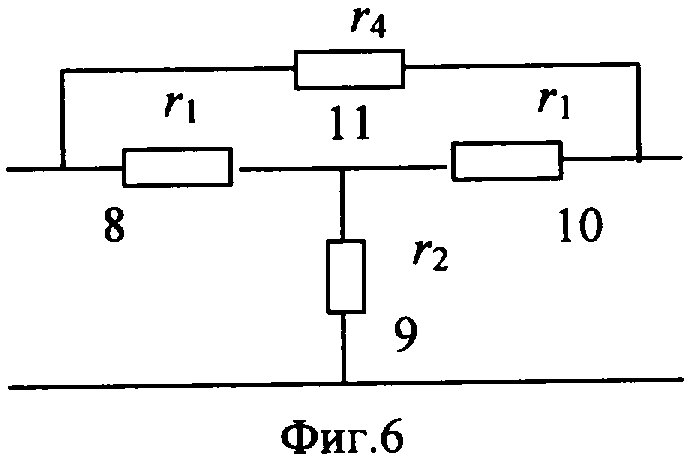
На фиг.6 приведена схема четырехполюсника по п.5, входящая в предлагаемое устройство.
Устройство-прототип содержит источник 1 амплитудно-модулированных сигналов, четырехполюсник 2, нелинейный элемент 3, фильтр нижних частот 4 на элементах R, С, разделительную емкость 5 на элементе Ср и низкочастотную нагрузку 6 на элементах Rн, Сн.
Принцип действия устройства демодуляции амплитудно-модулированных сигналов (прототипа) состоит в следующем.
Амплитудно-модулированный сигнал от источника 1 подают на демодулятор из последовательно включенного полупроводникового диода к ФНЧ. Принцип действия устройства, реализующего этот способ состоит в том, что с помощью нелинейного элемента 3 разрушается спектр АМС на высокочастотные и низкочастотные составляющие. Последние выделяются с помощью ФНЧ 4 и поступают в низкочастотную нагрузку 6. Между источником модулированных сигналов и нелинейным элементом включен реактивный четырехполюсник 2 для согласования и селекции сигнала и помехи. Разделительная емкость 5 устраняет постоянную составляющую. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного амплитудно-модулированного колебания.
Недостаток способа и устройства его реализации состоит в том, что при прохождении АМС через указанную цепь глубина модуляции уменьшается, причем чем уже полоса пропускания контура, т.е. чем лучше помехоустойчивость, тем глубина модуляции уменьшается на большую величину. Кроме того, неизвестны абсолютные значения амплитуд низкочастотного колебания в крайних его состояниях. Значения амплитуд определяются абсолютными значениями модулей коэффициентов передачи в двух состояниях и амплитудами входного сигнала. Абсолютные значения модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного АМС, также неизвестны.
Высокочастотная часть структурной схемы обобщенного предлагаемого устройства по п.1 (фиг.2) состоит из каскадно-соединенных источника сигнала 1, резистивного четырехполюсника 2, двухполюсного нелинейного элемента 3, включенного между четырехполюсником и высокочастотной нагрузкой 7 в продольную цепь. Низкочастотная часть структурной схемы содержит ФНЧ 4, разделительную емкость 5 и низкочастотную нагрузку 6.
Принцип действия данного устройства состоит в том, что при подаче АМС от источника 1 с сопротивлением z0 в результате специального выбора значений параметров классической матрицы передачи четырехполюсника 2 из условий обеспечения заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного АМС, после прохождения его через высокочастотную часть достигается минимум искажений входного сигнала. В дальнейшем спектр АМС разрушается при помощи нелинейного элемента 3, ФНЧ 4 выделяет низкочастотную составляющую, постоянная составляющая устраняется с помощью разделительной емкости 5. В результате низкочастотное колебание, амплитуда которого изменяется по закону огибающей АМС, выделяется на низкочастотной нагрузке 6. При непрерывном изменении амплитуды амплитудно-модулированного сигнала будет реализована демодуляция входного сигнала.
Предлагаемое устройство демодуляции АМС по п.2 отличается от устройства по п.1 тем, что резистивный четырехполюсник (фиг.3) выполнен в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1 (8), r2 (9) двухполюсников составляют первое Г-образное соединение, а резистивные сопротивления r3 (10), r4 (11) двухполюсников составляют второе Г-образное соединение). Сопротивления r2, r3, r4 определяются аналитически по найденным математическим выражениям однозначно. При этом значения этих сопротивлений функциональным образом зависят от произвольно выбираемого значения сопротивления r1 или выбираемого исходя из каких-либо других физических соображений. В предлагаемом изобретении значение сопротивления r1 выбирается из условий обеспечения физически реализуемых значений r2, r3, r4. Значение модуля коэффициента передачи в первом состоянии выбирается из условия обеспечения физической реализуемости четырехполюсника. Значения сопротивлений r2, r4 двухполюсников 9, 10, 11, кроме того, зависят от оптимальных значений элементов матрицы передачи 4-полюсника и заданных комплексных сопротивлений источника сигнала и нагрузки. Принцип действия этого устройства аналогичен принципу действия устройства по п.1.
Предлагаемое устройство демодуляции АМС по п.3 отличается от устройства по п.1 тем, что резистивный четырехполюсник (фиг.4) выполнен в виде двух каскадно-соединенных -образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1, r2 двухполюсников составляют первое -образное соединение, а резистивные сопротивления r3, r4 двухполюсников составляют второе -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.1.
Предлагаемое устройство демодуляции АМС по п.4 отличается от устройства по п.1 тем, что резистивный четырехполюсник (фиг.5) выполнен в виде двух каскадно-соединенных П-образных соединений трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников (резистивные сопротивления r1, r2, r3 двухполюсников составляют П-образное соединение, а резистивные сопротивления r4, r5 двухполюсников составляют -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.1.
Предлагаемое устройство демодуляции АМС по п.5 отличается от устройства по п.1 тем, что резистивный четырехполюсник (фиг.6) выполнен в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников с сопротивлениями r1, r2, r3, r4. Принцип действия этого устройства аналогичен принципу действия устройства по п.1.
Анализ условий физической реализуемости указанных четырех вариантов выполнения резистивного четырехполюсника (фиг.3-6) предлагаемого устройства (фиг.2) показывает, что из этого количества вариантов при произвольных заданных сопротивлениях источника сигнала и нагрузки всегда найдется такой вариант, что значения резистивных сопротивлений этого четырехполюсника, рассчитанные по вышеприведенным формулам, будут положительными, то есть физически реализуемыми. Наоборот, для каждого отдельно взятого варианта всегда найдутся такие значения сопротивлений источников сигнала и нагрузки, что значения резистивных сопротивлений четырехполюсников, рассчитанные по вышеприведенным формулам, окажутся физически реализуемыми.
Докажем возможность реализации указанных свойств.
Пусть на вход демодулятора воздействует амплитудно-модулированное колебание UAM(t)=Uн[1+macos( Ωt)]cos(ωнt+ϕo), где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; ma - глубина амплитудной модуляции; ϕо - начальная фаза; Ω - частота первичного информационного низкочастотного сигнала. Входной модулированный высокочастотный сигнал Sвх и преобразованный с помощью демодулятора высокочастотный сигнал (до фильтра нижних частот) Sвых связаны между собой следующим образом: Sвых=S21Sвх, где под входным и выходным сигналом подразумевается входное и выходное напряжения; S21 - коэффициент передачи.
Рассмотрим амплитудно-модулированные колебания в двух состояниях, характеризуемых крайними значениями диапазона изменения амплитуды.
Запишем указанные физические величины в двух состояниях в комплексной форме 
 Таким образом, на выходе высокочастотной части демодулятора модули коэффициента передачи и входного сигнала перемножаются, а их фазы складываются. Выходные напряжения в двух состояниях связаны между собой следующим образом:
Таким образом, на выходе высокочастотной части демодулятора модули коэффициента передачи и входного сигнала перемножаются, а их фазы складываются. Выходные напряжения в двух состояниях связаны между собой следующим образом:

где 
 - отношения модулей коэффициента передачи высокочастотной части демодулятора и входного сигнала в двух состояниях входного сигнала;
- отношения модулей коэффициента передачи высокочастотной части демодулятора и входного сигнала в двух состояниях входного сигнала; 
 разности фаз коэффициента передачи высокочастотной части демодулятора и входного сигнала в двух состояниях входного сигнала. Фаза входного АМС постоянна, поэтому разность фаз ϕвх=0. Для уменьшения искажений необходимо положить ϕ21=0.
разности фаз коэффициента передачи высокочастотной части демодулятора и входного сигнала в двух состояниях входного сигнала. Фаза входного АМС постоянна, поэтому разность фаз ϕвх=0. Для уменьшения искажений необходимо положить ϕ21=0.
Введем обозначения: m=m21mвх. Отношения модулей коэффициента передачи высокочастотной части демодулятора и входного сигнала, а также отношения модулей коэффициента передачи высокочастотной части демодулятора и сигнала на высокочастотной нагрузке связаны с глубиной амплитудной модуляции следующим образом:
 при m21>1 или
при m21>1 или  при m21>1;
при m21>1;
 при mвх>1 или
при mвх>1 или  при mвх<1;
при mвх<1;
 при m>1 или
при m>1 или  при m<1.
при m<1.
Пусть в первом состоянии, определяемом минимальным уровнем входного АМС, модуль коэффициента передачи принимает значение  . Тогда модуль коэффициента передачи демодулятора во втором состоянии будет определяться выражением
. Тогда модуль коэффициента передачи демодулятора во втором состоянии будет определяться выражением 
Пусть комплексные сопротивления нагрузки zн=rн+jxн, источника сигнала zo=ro+jxo, a также сопротивления двухполюсного нелинейного элемента z1,2=rД1,Д2+jxД1,Д2 в двух состояниях известны, то есть известна его классическая матрица передачи:
Резистивный четырехполюсник описывается матрицей передачи:
где 

 a, b, с, d - элементы классической матрицы передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965, 40 с.].
a, b, с, d - элементы классической матрицы передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965, 40 с.].
Эквивалентная схема демодулятора представляется в виде 4 каскадно-соединенных четырехполюсников (фиг.2). Нелинейный элемент включен между резистивным четырехполюсником и высокочастотной нагрузкой в продольную цепь.
Общая нормированная классическая матрица передачи демодулятора имеет вид:
Используя известную связь элементов матрицы рассеяния [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965, 40 с.], получим выражение для коэффициента передачи демодулятора  в двух состояниях диода:
в двух состояниях диода:

Подставим (5) в выражение (1) и после несложных, но громоздких преобразований и разделения комплексного уравнения на действительную и мнимую части, получим систему двух алгебраических уравнений:
 x0(1-m)+α[(xД2+xн)-(xД1+xн)m]++γ[x0(rД2+rн)-x0(rД1+rн)m+r0(xД2+xн)-r0(xД1+xн)m]=0.
x0(1-m)+α[(xД2+xн)-(xД1+xн)m]++γ[x0(rД2+rн)-x0(rД1+rн)m+r0(xД2+xн)-r0(xД1+xн)m]=0.
Решение системы (6) имеет вид двух взаимосвязей между элементами искомой матрицы передачи, оптимальных по критерию обеспечения заданного закона изменения (1) на фиксированной частоте:

где 

Поскольку  то границей области физической реализуемости является область изменения m, которая удовлетворяет условию равенства нулю знаменателя в выражениях для Fo, Eо, Do.
то границей области физической реализуемости является область изменения m, которая удовлетворяет условию равенства нулю знаменателя в выражениях для Fo, Eо, Do.
Решение уравнения, вытекающего из этого равенства, дает выражение для граничного значения произведения отношений модулей коэффициентов передачи в двух состояниях управляемого элемента, определяемых двумя состояниями входного сигнала, и модулей входного сигнала:

Выражение (8) имеет физический смысл, если mгр>0, т.е. числитель и знаменатель должны быть одного знака.
Полученная система двух взаимосвязей (7) между элементами матрицы передачи резистивного четырехполюсника означает, что высокочастотная часть демодулятора амплитуды входного сигнала должна содержать не менее чем два независимых резистивных элемента, значения параметров которых должны удовлетворять системе двух уравнений, сформированных на основе этих взаимосвязей. Для отыскания оптимальных значений параметров резистивного четырехполюсника необходимо выбрать какую-либо схему из М≥2 элементов, найти ее матрицу передачи, элементы которой выражены через параметры схемы резистивного четырехполюсника, и подставить их в (7). Сформированная таким образом система уравнений должна быть решена относительно выбранных двух параметров. Значения остальных М-2 параметров могут быть отнесены к сопротивлению zo или заданы произвольно. После использования описанного алгоритма будет реализована операция обеспечения заданного отношения модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного АМС при любой его начальной глубине модуляции. В результате в низкочастотной нагрузке, подключенной к ФНЧ, будет выделен низкочастотный сигнал, амплитуда которого изменяется по закону изменения амплитуды первичного информационного сигнала. Однако абсолютные значения модулей коэффициентов передачи в каждом из состояний неизвестны. Для обеспечения заданных их значений необходимо решить следующую задачу параметрического синтеза.
Пусть при тех же исходных данных, что и при решении первой задачи (1)-(3), требуется, чтобы в одном из состояний, например в первом, модуль коэффициента передачи принимал требуемое значение m1:
Подставим (5) в выражение (9) и, разделив между собой действительную и мнимую части, получим систему двух уравнений:


где 
 x=rorн-хохн; у=roxн+хоrн.
x=rorн-хохн; у=roxн+хоrн.
После денормировки коэффициента передачи (5) путем умножения на  последнее выражение изменяется a1=rн; b1=xн.
последнее выражение изменяется a1=rн; b1=xн.
Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом 
Решение системы (10) имеет вид взаимосвязей между элементами классической матрицы передачи четырехполюсника:

где 
Поскольку элементы матрицы передачи четырехполюсника (7) и (11) описывают один и тот же четырехполюсник, то указанные выражения должны быть попарно равны. Из этих равенств вытекает, что все оставшиеся свободные в (7) и (11) элементы матрицы передачи должны определяться с помощью следующих выражений:

Анализ показывает, что элементы резистивного четырехполюсника должны определяться из решения системы четырех уравнений - (7) или (11) и (12). Таким образом, все четыре элемента матрицы передачи четырехполюсника оказываются строго заданными. Для того чтобы они определяли физически реализуемый четырехполюсник, должно выполняться свойство взаимности четырехполюсника [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965, 40 с.], которое в наших обозначениях имеет вид: d2(α-βγ)=1, из которого следуют ограничения на величину модуля коэффициента передачи в первом состоянии управляемого элемента:

Использованные условия описывают свойство взаимности. Поэтому достаточно выполнения любых трех из четырех уравнений. Четвертое уравнение оказывается зависимым от остальных.
Таким образом, количество резистивных двухполюсников, из которых формируется четырехполюсник должно быть равным не менее трем. Значения параметров этих двухполюсников определяется путем решения указанных систем трех или четырех уравнений. При этих значениях параметров в первом состоянии будут реализованы заданное значение m1, a также заданное отношение модулей m в двух состояниях, определяемых двумя крайними уровнями амплитуды входного АМС. Это означает, что во втором состоянии модуль коэффициента передачи тоже определен с помощью соотношения 
В соответствии с указанным алгоритмом были синтезированы (определены выражения для оптимальных значений сопротивлений резистивных двухполюсников) простейшие схемы четырехполюсника из не менее чем трех резисторов. Матрицы передачи исследуемых четырехполюсников получены из работы [Гуревич И.В. Основы расчета радиотехнических цепей (линейные цепи при гармонических воздействиях). М.: Связь, 1975, 30-34 с.].
Для схемы в виде двух каскадно-соединенных Г-образных соединения четырех резистивных двухполюсников (фиг.3):

Свободно выбираемое сопротивление r1 обеспечивает физическую реализуемость сопротивлений r2, r3, r4, т.е. их положительность.
Для схемы в виде двух каскадно-соединенных  -образных соединения четырех резистивных двухполюсников (фиг.4):
-образных соединения четырех резистивных двухполюсников (фиг.4):

Свободно выбираемое сопротивление r4 обеспечивает физическую реализуемость сопротивлений r1, r2, r3, т.е. их положительность.
Для схемы в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников (фиг.5):

Свободно выбираемые сопротивления r3, r5 обеспечивают физическую реализуемость сопротивлений r1, r2, r4, т.е. их положительность.
Для схемы в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников (фиг.6):

Свободно выбираемое сопротивление r3 обеспечивает физическую реализуемость сопротивлений r1, r2, r4, т.е. их положительность.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (включение двухполюсного нелинейного элемента в продольную цепь (последовательно) между резистивным четырехполюсником и высокочастотной нагрузкой, формирование резистивного четырехполюсника соединенными между собой двухполюсниками, в виде двух каскадно-соединенных Г-образных соединения четырех резистивных двухполюсников в виде двух каскадно-соединенных -образных соединения четырех резистивных двухполюсников, в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников, в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников, параметры которых определены по соответствующим математическим выражениям), приводит к достижению положительного эффекта, заключающегося в обеспечении требуемых крайних уровней амплитуды АМС на высокочастотной нагрузке при любых уровнях амплитуды на входе демодулятора, а также в возможности обеспечения предельно достижимой рабочей полосы частот.
При этом модуль коэффициента передачи в первом состоянии выбран оптимальным по критерию обеспечения физической реализуемости и наибольшей полосы частот. В обоих состояниях нелинейного элемента значения модулей коэффициентов передачи контролируются.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды и резисторы, сформированные в заявленные схемы резистивного четырехполюсника в виде перечисленных схем соединения двухполюсников. Значения параметров резисторов однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного способа и устройства его реализации заключается в обеспечении заданных значений модулей коэффициентов передачи в двух состояниях принятого амплитудно-модулированного сигнала, что повышает помехоустойчивость, и возможности выбора места включения двухполюсного нелинейного элемента для повышения физической реализуемости и увеличения рабочей полосы частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341872C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351060C2 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341873C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341878C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341876C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342771C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341877C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341871C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341870C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341869C1 |
Изобретение относится к радиосвязи и может быть использовано для демодуляции амплитудно-манипулированных и амплитудно-модулированных (AM) сигналов. Технический результат заключается в обеспечении заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного AM сигнала. В устройстве демодуляции AM сигналов в качестве нелинейного элемента выбран двухполюсный нелинейный элемент, который включен между четырехполюсником и высокочастотной нагрузкой в продольную цепь (последовательно), к высокочастотной нагрузке подключен фильтр нижних частот, четырехполюсник выполнен из числа резистивных двухполюсников, не меньшего трех, значения параметров которых выбраны из условия обеспечения заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, определяемых двумя крайними значениями уровней входного AM сигнала. 4 з.п. ф-лы, 6 ил.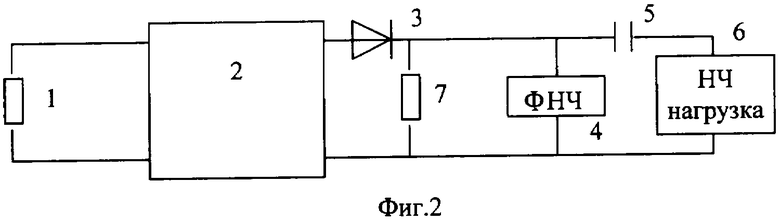
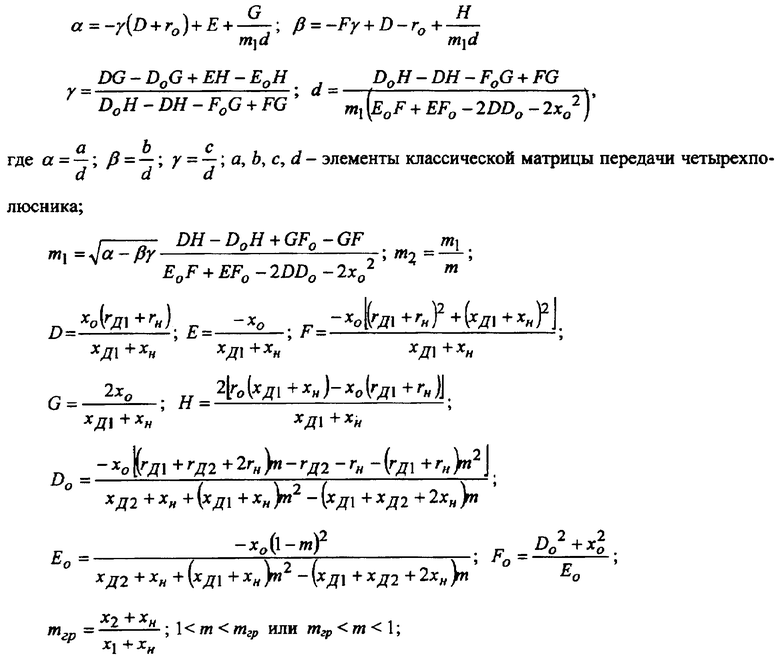
z1,2=rД1,Д2+jxД1,Д2 - заданные значения сопротивлений управляемого двухполюсного элемента в двух состояниях (1 и 2), определяемых двумя крайними уровнями низкочастотного управляющего сигнала; zн=rн+jxн, zо=rо+jxо - заданные комплексные сопротивления нагрузки и источника сигнала; m1 - значение модуля коэффициента передачи в первом состоянии нелинейного элемента, при котором обеспечивается физическая реализуемость четырехполюсника; m2 - значение модуля коэффициента передачи во втором состоянии нелинейного элемента; m - заданное значение отношение модулей коэффициентов передачи m1 и m2.

где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значение сопротивления r1 выбирается из условия обеспечения физической реализуемости сопротивлений r2, r3, r4.
 -образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значение сопротивления r4 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r3.
-образного соединения двух резистивных двухполюсников, резистивные сопротивления r1, r2, r3 двухполюсников, составляющих П-образное соединение, и резистивные сопротивления r4, r5 двухполюсников, составляющих -образное соединение, выбраны с помощью следующих математических выражений: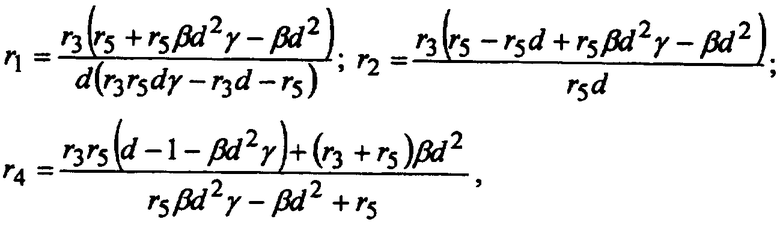
где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значения сопротивлений r3 и r5 выбираются из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.

где α, β, γ, d и остальные обозначения имеют тот же смысл, что и в п.1; значение сопротивления r3 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
| БУГА Н.Н | |||
| и др | |||
| Радиоприемные устройства | |||
| - М.: Радио и связь, 1986, 149, рис.5.13а) | |||
| АМПЛИТУДНЫЙ ДЕТЕКТОР | 2001 |
|
RU2208900C1 |
| US 5796309 А, 18.08.1998 | |||
| Агрегат для изготовления грампластинок | 1977 |
|
SU682382A1 |
| БАСКАКОВ С.И | |||
| Радиотехнические цепи и сигналы | |||
| - М.: Высшая школа, 1988, с.289 | |||
| ГОЛОВКОВ А.А | |||
| и др | |||
| Взаимосвязи между элементами матрицы сопротивлений и их использование для синтеза | |||

