Изобретение относится к способу для обнаружения и определения места пожара и/или источника пожара в одной или нескольких контролируемых зонах, а также устройство реализации способа.
Изобретение касается устройства обнаруживающее пожара, имеющее датчик для детектирования параметра пожара, которому через систему трубопроводов подается определяющая часть объема воздушной среды помещения или воздушной среды устройства при помощи всасывающего устройства, как, например, вентилятора.
Термин «параметр пожара» следует понимать как измеряемую физическую величину, которая изменяется в области зарождающегося пожара. Например, таким параметром может служить температура окружающей среды, а также твердое, жидкое или газообразное наполнение воздушной среды (накопление частиц дыма или твердых частиц или накопление дыма или газов) или локальное фоновое излучение.
Обе процедуры так же, как устройства обнаружения пожара указанного типа, известны и используются для быстрого выявления пожаров во время их начальной стадии. Типичными зонами применения являются те или иные помещения, содержащие высококачественное или важное оборудование, как, например, банковские или иные помещения, оборудованные компьютерными системами, или непосредственно компьютерное оборудование. В добавление, постоянно извлекаемая часть воздушной среды помещения, характеризующая ее состояние или часть воздушной среды устройства охлаждения воздуха, далее именуется как «проба воздуха». Соответствующим средством для извлечения подобных проб воздуха и их подачи в пожарный датчик, а именно в корпус пожарного датчика, является система всасывающих трубопроводов, спроектированная как система трубопроводов, которые установлены, например, под потолком помещения и ведут к воздухозаборным отверстиям корпуса пожарного датчика и которые всасывают пробы воздуха через отверстия в системе трубопроводов. Важным условием при обнаружении пожара на начальной стадии является постоянная подача устройством обнаружения пожара достаточного количества воздуха без задержки в чувствительную камеру датчика. Подходящим датчиком здесь может быть, например, точечный дымовой датчик, который измеряет плотность светового излучения в дымовой камере датчика при появлении в последнем твердых частиц дыма, или также датчик рассеянного света, встроенный во всасывающий тракт, который выявляет рассеянное световое излучение при появлении в центре датчика частиц дыма.
Способы и устройства, использующиеся во множестве систем всасывающих трубопроводов для обнаружения и выявления места источников пожара в одной и более контролируемых зонах, хорошо известны из предшествующего уровня техники и были разработаны, основываясь на том факте, что, к примеру, пожарным командам достаточно трудно обнаружить место источника возгорания в больших залах, офисных зданиях, гостиницах или кораблях. Одна система всасывания дыма, имеющая один блок обнаружения пожара может - предмет для государственного регулирования - контролировать площадь до 2000 м2, которая может также содержать несколько помещений. Для того чтобы позволить быстро конкретизировать место тревоги, были определены такие технические требования, как, например, в немецкой «Рекомендации для Автоматических Пожарных Установок Оповещения, Проектирование и Конструирование» (VdS 2095). В соответствии с ними можно объединить множество смежных помещений в одну тревожную зону, доступ в любое из помещений может быть быстро визуально обнаружен, при этом общая площадь не должна превышать 1000 м2, и в случае появления пожара имеющиеся визуальные тревожные индикаторы на станции мониторинга пожарных тревог будут сигнализировать о месте появления пожара.
Устройства обнаружения пожара, которые используют аспирационный принцип работы, и которые контролируют множество помещений, объединенных одной системой всасывания дыма, имеют преимущество наиболее возможно раннего выявления пожара, но без гарантии, что место появления пожара будет точно определено в таких, обычно используемых, системах всасывания дыма при мониторинге множества помещений. Это обстоятельство является следствием того факта, что каждая проба воздуха, которая соответствует воздуху помещения из одной контролируемой зон, подается на детектор для определения параметра пожара только после того, как она будет перемешана в общей системе трубопроводов. Поэтому все датчики могут установить, что произошло возгорание и/или оно неминуемо приближается в одной из контролируемых зон. Для того чтобы дополнительно гарантированно конкретизировать место появления пожара в одной из упомянутых контролируемых зон, обычно необходимо подать каждую пробу воздуха, отобранную из каждой контролируемой зоны другому датчику отдельной системы всасывающих трубопроводов для определения параметра пожара. Однако при контролировании множества контролируемых зон появляется недостаток, который заключается в том, что должно быть установлено необходимое число систем всасывающих трубопроводов, которые включают в себя очень дорогую и сложную реализацию одной или более аспирационной системы выявления пожара.
В патенте Франции FR 2670010 A1 раскрываются тревожные блоки, которые используются для выявления пожара в дымоотсасывающих узлах в разветвленной системе всасывающих трубопроводов. Эти тревожные блоки состоят из точечного дымового датчика, встроенного в корпус с проложенным кабелем для подсоединения впускной и выпускной труб и с сигнальной лампой на поверхности его корпуса. Недостатком такой конструкции является ее размеры, конструкция и цена, поэтому такие тревожные блоки не могут быть использованы в каждом отдельном воздухозаборном отверстии.
Также известные из WO 00/68909 способ и устройство обнаружения пожара в контролируемых зонах, при помощи которых может быть выявлено место источника пожара. Этот способ использует соответствующее устройство в каждой контролируемой зоне, содержащее два пересекающихся трубопровода, в которых один или более вентиляторов непрерывно отсасывают воздух из контролируемых зон через всасывающие воздухозаборные отверстия, расположенные в трубопроводах, и доставляют его, по меньшей мере, к одному датчику для детектирования одного параметра пожара в трубопроводе. Таким образом, выявление места возникновения пожара следует из исследования реагирования двух датчиков, расположенных в пересекающихся трубопроводах. Такие трубопроводы, упорядоченные подобно строкам и столбцам матрицы, где в каждом столбце или строке матрицы расположен один общий датчик, позволяют контролировать множество зон, в которых реализована описанная система. Однако недостатком такого известного устройства являются очень существенные расходы на установку матрицы подобной системы трубопроводов.
В патенте Германии DE 3237021 С2 описана селективная система детектирования газа/дыма, имеющая множество всасывающих линий, раздельно соединенных с различными точками измерения в контролируемой зоне, необходимых, чтобы отводить пробы воздуха или газа от упомянутых точек измерения. Здесь газовый или дымовой датчик, подсоединенный к этим линиям, реагирует на присутствие определенного газа в пробе, в которой превышено значение установленного порога, и выдает сигнал обнаружения на индикатор и/или по цепи тревожной сигнализации. Дополнительно во всасывающих линиях размещены клапаны, которые периодически открываются в контролируемой петле линии. Выявление пожара при помощи этой системы детектирования газа/дыма заключается в том, что в отсутствие детектируемого сигнала, блок управления устанавливает положение клапанов так, что все всасывающие линии вместе подключены к датчику, а в случае появления детектируемого сигнала - устанавливает их в режим измерения, в котором всасывающие линии, как правило, непосредственно или в группах соединены с датчиком. Однако эта функция для определения источника пожара предполагает, что датчик может быть подключен к каждой контролируемой зоне посредством индивидуальной и селективно-открытой воздухоподающей линии. По сути это означает необходимость установки дорогостоящей системы трубопроводов для реализации этих индивидуально селективных подключений. Недостатком является высокая стоимость установки необходимых всасывающих линий.
Далее в WO 93/23736 раскрывается устройство детектирования загрязнения воздуха, основанное на всасывающей системе подобной сети, имеющее большое число мест взятия проб воздуха из контролируемых помещений. Это устройство детектирования загрязнения воздуха имеет множество впускных отверстий, подключенных к сети подобной всасывающей системы и индивидуально контролируемых. При нормальной обстановке все эти впускные отверстия остаются открытыми до тех пор, пока детектирующее устройство не обнаружит загрязнение/дым. Избирательно закрывая впускные отверстия, впоследствии появляется возможность выявить конкретную зону пожара. Но для работы этого детектирующего устройства также требуется дорогостоящая установка всасывающих линий структурированных подобных сети для того, чтобы гарантировать надежное обнаружение очага пожара. Недостатком здесь также являются большие затраты на установку системы трубопроводов.
Из патента Германии DE 10125687 AI известно устройство для выявления и определения места источника пожара в одной или более контролируемой зоне. Это устройство содержит основной датчик для детектирования параметра пожара с воздухозаборным блоком, постоянно подающим пробы окружающего воздуха из контролируемых зон посредством трубопровода, имеющего впускные отверстия, расположенные в каждом контролируемом помещении. Каждый дополнительный датчик установлен, по меньшей мере, в одном воздухозаборном отверстии или в его окрестности каждой контролируемой зоны, и срабатывает при получении сигнала включения, переданного от контроллера при появлении сигнала обнаружения, отправленного основным датчиком. Таким образом, включенный дополнительный датчик служит для выявления источника пожара и конкретизации зоны среди множества контролируемых зон. Это устройство, известное из предшествующего уровня техники, имеет недостаток, который заключается в том, что при использовании большого числа дополнительных датчиков, стоимость объединенного устройства выявления пожара высока, что также влечет за собой достаточно сложную прокладку проводов, дополнительных датчиков при установке устройства.
В основу настоящего изобретения поставлена задача реализации простого и экономичного устройства и способа для выявления источника пожара, которое комбинирует преимущества известных систем всасывания дыма или газа - активное всасывание и скрытый монтаж - с преимуществами конкретного расположения каждого индивидуального воздухозаборного отверстия и, как следствие, возможностью обнаружения действительного места пожара или задымления при развитии пожара. Настоящее изобретение также решает дополнительную задачу создания системы тушения пожара, включающей в себя аспирационное устройство обнаружения пожара, которое позволит как надежно выявить пожар, так и конкретно определить место появления пожара среди множества контролируемых зон, при помощи устройства обнаружения пожара, которое может подключить при необходимости множество систем всасывающих трубопроводов, контролирующих определенные зоны, к одному датчику для того, чтобы определить параметр пожара.
В соответствии с настоящим изобретением эта задача решена способом, подробно описанным вначале, который включает следующие этапы: пробы воздуха, индивидуально отображающие каждую контролируемую зону, отбираются из упомянутых контролируемых зон (желательно постоянно) через систему общих всасывающих трубопроводов; определяется, по меньшей мере, один параметр пожара, установленный для проб воздуха, отбираемых системой всасывающих труб для подачи, по меньшей мере, к одному датчику; всасываемые в системы труб пробы воздуха движутся при помощи вентилирующего устройства или всасывающего/продувающего устройства; пробы воздуха, соответствующие воздушной среде помещения каждой отдельной контролируемой зоны, повторно извлекаются через систему всасывающих трубопроводов до того, как, по меньшей мере, один датчик повторно детектирует параметр пожара в пробе воздуха; время, прошедшее прежде, чем произойдет повторное детектирование параметра пожара в ранее повторно извлеченной пробе воздуха, анализируется для того, чтобы определить место имеющегося или начинающегося пожара в одной из множества контролируемых зон; и выдается сигнал, который означает развитие и/или наличие пожара в одной или более контролируемой зоне, при этом сигнал также содержит дополнительную информацию для точного определения места пожара в одной или более контролируемой зоне.
Лежащая в основе техническая проблема настоящего изобретения решается устройством, которое содержит систему трубопроводов, объединяющих множество зон для мониторинга и сообщенных с каждой отдельной контролируемой зоной при помощи, по меньшей мере, одного воздухозаборного отверстия, всасывающее устройство для отбирания проб воздуха, отображающих определенную контролируемую зону при помощи системы всасывающих труб и воздухозаборных отверстий, и, по меньшей мере, один датчик для определения, по меньшей мере, одного параметра пожара в пробах воздуха, отобранных через систему всасывающих трубопроводов, при этом устройство характеризуется наличием вентилирующего устройства для перемещения взятых проб воздуха в системе всасывающих трубопроводов, когда, по меньшей мере, один датчик определяет, по меньшей мере, один параметр пожара в отобранных пробах воздуха, и наличием, по меньшей мере, одного индикаторного элемента, который идентифицирует место пожара в одной из контролируемых зон и/или наличием устройства связи, которое передает информацию о развивающемся пожаре и/или о наличии пожара в одной или более контролируемой зоне и о точном месте пожара в одной или более контролируемой зоне расположенному удаленно устройству.
Задача применения технологии решена путем использования устройства в соответствии с изобретением в качестве выявляющего пожар составного элемента системы пожаротушения, который предназначен для запуска подачи огнетушащего средства в одной из контролируемых зон.
Важнейшим аспектом настоящего изобретения является тот факт, что уже получили широко распространенное использование системы всасывания дыма или газа, также известные как аспирационные мониторинговые системы, только методический подход позволяет добиться простоты и экономичности при выявлении одиночных источников пожара или газовых примесей, превышающих существующие нормы. В то же время для достижения необходимых стандартов безопасности при соответствующей модификации, необходимо избежать существенных капитальных конструкций и эксплутационных расходов. Особенным преимуществом настоящего изобретения является не только очень простая реализация и эффективный способ удовлетворения требованиям выявления и конкретизации места пожара и/или начала пожара в одной из множества контролируемых зон, что достигается путем простой модернизации существующих аспирационных систем вместе с низкими эксплутационными расходами, но и изобретательский способ конкретизации места пожара, который также открывает новые возможности применения систем всасывания дыма. Таким образом, можно обойтись без, например, множества точечных пожарных сигнализаций, использующихся в зданиях с множеством отдельных комнат. Способ изобретения позволяет надежно обнаруживать пожар или начало пожара в контролируемой зоне и выявлять эту контролируемую зону из множества контролируемых зон при использовании только одной системы всасывающих трубопроводов, одного датчика для детектирования параметра пожара и одного всасывающего/продувающего устройства. Это позволяет избежать необходимости тщательной разработки установки множества систем всасывающих трубопроводов в сочетании с множеством датчиков, что, безусловно, и преимущественно уменьшает структурную сложность или модернизацию множества контролируемых зон при установке устройств обнаружения пожара. Поскольку обнаружение и конкретизация зоны пожара основана на аспирации, настоящий способ крайне чувствителен и, в частности, независим от высоты пространства или высокой скорости воздушных потоков в отдельной контролируемой зоне. Высокие потолки или высокие скорости воздушных потоков приводят в помещениях с кондиционируемым воздухом, например, к сильно ослабленному дыму. Высокая детектирующая чувствительность способа изобретения при обнаружении пожара и конкретизации его места в большой степени не зависит от этих параметров. Кроме того, способ изобретения имеет преимущество в том, что пожар и/или начинающийся пожар может быть надежно выявлен и зафиксирован вне зависимости от таких помех, как пыль, грязь, влага или экстремальные температуры в отдельной контролируемой зоне. В соответствии с изобретением способ также позволяет использовать только одну систему всасывающих трубопроводов, которая может быть скрыто вмонтирована в архитектуру здания, что является благоприятным с точки зрения эстетики.
В систему всасывающих трубопроводов постоянно отбираются пробы воздуха, и после того, как датчик детектирования параметров пожара определит наличие, по меньшей мере, одного параметра пожара в пробе воздуха, поступившей через систему всасывающих трубопроводов, полный объем системы всасывающих трубопроводов заполняется свежим воздухом, т.е. воздухом, который определенно не проявляет какого-либо параметра пожара. После того как пробы воздуха будут выдуты, система всасывающих трубопроводов будет отбирать пробы воздуха, отображающие состояние воздушной среды помещения каждой отдельной контролируемой зоны среди всех контролируемых зон. Важным аспектом способа, согласно настоящему изобретению, является теперь измерение времени пребывания проб воздуха и/или особые значения времени пребывания проб воздуха до тех пор, пока датчик однажды вновь не выявит параметр пожара в пробах воздуха, отобранных через обычно используемую систему всасывающих трубопроводов. Впоследствии это время пребывания оценивается для того, чтобы определить место пожара или место, где зарождается пожар, основываясь на том факте, что каждая отдельная контролируемая зона имеет определенное расстояние до датчика, а также на том, что время пребывания проб воздуха зависит от системы всасывающих трубопроводов.
Для реализации вышеописанного способа устройство в соответствии с настоящим изобретением позволяет всасывающему устройству обеспечить поступление проб воздуха, отображающих состояние воздушной среды помещения отдельных контролируемых зон среди каждой контролируемой зоны при помощи системы всасывающих труб, соединенных с каждой отдельной контролируемой зоной через воздухозаборные отверстия и впоследствии ведущих их к датчику. Несомненно, для уменьшения вероятности отказа датчика в устройстве можно использовать, в соответствии с изобретением, множество датчиков для детектирования параметра пожара. Также представляется возможным использовать один датчик для детектирования какого-либо одного параметра пожара, а другой датчик - для детектирования другого. В соответствии с настоящим изобретением устройство имеет особенное преимущество при техническом обслуживании и ремонте. Используя лишь один датчик, одно всасывающее устройство и одно продувающее устройство, которые могут быть расположены в отдельной зоне вне контролируемых зон, что облегчит доступ техническому персоналу, безусловно уменьшит общие затраты на техническое обслуживание, но также позволит техническому персоналу не находится в контролируемых зонах, что является особенно важным аспектом при наличии так называемых «чистых комнат» (производственные помещения с высочайшей степенью защиты от пыли и других загрязнений), корабельных кают или тюремных камер. В особенности предпочтительным вариантом реализации в соответствии с изобретением является устройство, дополнительно выполняющее роль устройства связи, при помощи которого информация передается к месту удаленно расположенного устройства, сигнализирующего о чрезвычайной ситуации и/или о наличии пожара в одной или более контролируемой зоне и определяющего точное место пожара в одной или более контролируемой зоне. Удаленно расположенное устройство в этом контексте может быть, например, системой пожарной сигнализации или пунктом управления оперативной группы. Таким образом, устройство связи позволяет, например, по проводной или беспроводной связи передать соответствующий сигнал, содержащий важную информацию о пожаре, связанному с ним приемнику. Упомянутое устройство связи может контролировать само себя, несомненно, например, для того, чтобы изменить или протестировать рабочий режим устройства. Инфракрасная технология будет также подходящей в качестве возможного средства связи.
Предпочтительные варианты реализации изобретения, относящиеся к способу, указаны в п.2-9 формулы изобретения, и предпочтительные варианты реализации изобретения, относящиеся к устройству, указаны в п.11-20 формулы изобретения.
Например, особенно предпочтительным вариантом реализации для способа является определение скорости потока воздушных проб в системе всасывающих трубопроводов при их отборке из отдельных контролируемых зон. Эти скорости потоков используются для расчета времени, необходимого для полного продува проб воздуха, сосредоточенных в системе всасывающих трубопроводов. Определение или измерение скорости потока, таким образом, может быть выявлено прямо или косвенно; т.е., к примеру, основываясь на параметрах устройства, таких как выходная мощность устройства всасывания, эффективное потоковое поперечное сечение системы всасывающих трубопроводов и соответствующие диаметры воздухозаборных отверстий, расположенные вдоль системы всасывающих трубопроводов. Прямые измерения возможны с помощью многих различных способов измерения скорости потоков, известных из уровня техники. Здесь было бы возможным использовать, например, проволочный или пленочный термоанемометр. Рассчитывая время, необходимое для устройства обдува для полного продува проб воздуха через систему всасывающих трубопроводов, можно минимизировать время продува и определить место пожара в возможное кратчайшее время.
Особенно преимущественной реализацией способа настоящего изобретения является этап, обеспечивающий продув отобранных проб воздуха, находящихся в системе всасывающих трубопроводов, который дополнительно включает в себя этап определения скорости потока во время этого продува для того, чтобы рассчитать время необходимое для полного продува проб воздуха через систему всасывающих трубопроводов. Здесь необходимо отметить тот факт, что всасывание и продув очень вероятно происходит с различными скоростями потоков, даже если используется один вентилятор для всасывания и продувания, поскольку обычно вентиляторы имеют различные характеристики для двух режимов работы. Основываясь на том, что скорость потока определяется во время продува, время, которое необходимо для полного продува всех проб воздуха через систему всасывающих трубопроводов, рассчитывается после, при этом это рассчитанное время является очень точной величиной.
Также особенно предпочтительным является определение скорости потока проб воздуха в системе всасывающих трубопроводов во время возобновляемого отбора проб воздуха, отображающих отдельные контролируемые зоны. Впоследствии определенная скорость потока используется в качестве основы для расчета времени пребывания проб воздуха, соответствующих воздушной среде помещения отдельных контролируемых зон во время возобновляемого отбора проб воздуха, отображающих отдельные контролируемые зоны. Этот вариант реализации способа позволяет достичь особенно высокой надежности и точности определения места пожара. Несомненно, время пребывания проб воздуха, имеющее место при возобновляемом отборе проб воздуха, отображающих отдельные контролируемые зоны, может быть также рассчитано основываясь на том, что, например, скорость потока определяется во время отбора проб воздуха, отображающих отдельные контролируемые зоны, или основываясь на теоретических величинах.
Взятие проб воздуха в соответствии со способом изобретения реализуется при помощи всасывающего устройства, при помощи которого последующий повторный отбор проб воздуха из отдельных контролируемых зон происходит благодаря всасывающей линии, которая уменьшена по сравнению с всасывающей линией, которая используется для ранее представленного отбора проб воздуха. В особенности предпочтителен способ, при котором достигается длительное время пребывания проб воздуха при повторном отборе, а также увеличивается различие времени пребывания проб воздуха для различных воздухозаборных отверстий. Как результат, достигается более надежное соотношение измеренного времени пребывания проб воздуха от отдельной контролируемой зоны. При этом возможен допуск в измерении времени пребывания проб воздуха, например, в пределах 0,5-2 секунд. Для того чтобы избежать наложения диапазона допуска времени пребывания проб воздуха для двух соседних воздухозаборных отверстий, что приведет к невозможности определения места пожара, то, как следствие, повторный отбор проб воздуха происходит на малой всасывающей линии. Поэтому этот вариант реализации преимущественно увеличивает точность измерения времени пребывания проб воздуха. Несомненно также возможно - дополнительно или взамен - увеличить частоту взятия проб для выявления параметра пожара датчиком, что также увеличит точность измерения времени пребывания проб воздуха.
Особенно предпочтительной реализацией способа в соответствии с изобретением является дополнительное обеспечение процедуры автоматической настройки, включающей в себя следующие этапы: искусственно создается параметр пожара на воздухозаборном отверстии наиболее удаленной контролируемой зоны, по меньшей мере, от одного датчика для определения полного времени процедуры автоматической настройки; пробы воздуха отбираются из отдельных контролируемых зон через общую систему всасывающих трубопроводов до тех пор, пока, по меньшей мере, один датчик не детектирует искусственно созданный параметр пожара в отобранных пробах воздуха; находящиеся внутри системы всасывающих трубопроводов, отобранные пробы воздуха продуваются при помощи продувающего или всасывающего/продувающего устройства; новые пробы воздуха вновь отбираются из отдельных контролируемых зон через систему всасывающих трубопроводов, по крайней мере, до тех пор, пока, по меньшей мере, один датчик вновь не детектирует искусственно созданный параметр пожара в пробах воздуха; оценивается время пребывания проб воздуха, пройденное до момента повторного детектирования искусственно созданного параметра пожара в повторно отобранных пробах воздуха для того, чтобы определить максимальное время пребывания проб воздуха для системы всасывающих трубопроводов; времена пребывания проб воздуха соответствующих воздушной среде помещения отдельных контролируемых зон вычисляются, основываясь на ранее определенных максимальных временах пребывания проб воздуха и конфигурации системы всасывающих трубопроводов, в частности на расстоянии между воздухозаборными отверстиями, диаметре системы всасывающих трубопроводов и диаметре воздухозаборных отверстий; и вычисленные времена пребывания проб воздуха сохраняются в таблице. Преимущество этого варианта осуществления, использующего процедуру автоматической настройки, является то обстоятельство, что более нет необходимости измерять скорость потока проб воздуха в системе всасывающих трубопроводов. В этом смысле, это позволяет установить устройство обнаружения пожара в режим самообучения, сгенерировать дым на самом дальнем воздухозаборном отверстии и измерить время пребывания проб воздуха в соответствии с этапами всасывания, продува и повторного всасывания. Основываясь на максимальном времени пребывания проб воздуха и определенной конфигурации трубопроводов, можно вычислить времена пребывания проб воздуха для всех воздухозаборных отверстий. Вычисление может быть произведено непосредственно устройством обнаружения пожара или внешним устройством, например портативным компьютером. Впоследствии вычисленные устройством обнаружения пожара времена пребывания проб воздуха сохраняются в таблице.
Особенно предпочтительной реализацией способа в соответствии с изобретением является использование процедуры автоматической настройки, дополнительно использующей корректирующую функцию для вычисленных и записанных в таблице времен пребывания проб воздуха для того, чтобы скорректировать значения времен пребывания проб воздуха для отдельных контролируемых зон. В этом случае необходимо принять во внимание то, что система всасывающих трубопроводов и/или воздухозаборные отверстия могут постепенно стать грязными, что приведет к постепенному изменению скорости потока. Поэтому корректирующая функция может использоваться для вычисления текущих времен пребывания проб воздуха в зависимости от времен пребывания проб воздуха, записанных в таблице. Оценивание времен пребывания проб воздуха в способе изобретения прежде, чем возобновится детектирование параметров пожара повторно отобранных проб воздуха, желательно производить, сравнивая результирующее время пребывания проб воздуха с соответствующими временами пребывания проб воздуха, вычисленными теоретически для отдельных контролируемых зон. Возможно в качестве подходящих параметров, от которых зависят теоретически рассчитанные времена пребывания проб воздуха, использовать длину соответствующих отрезков системы всасывающих трубопроводов между датчиком и воздухозаборными отверстиями соответствующих контролируемых зон, эффективное потоковое поперечное сечение системы всасывающих трубопроводов и/или соответствующих отрезков системы всасывающих трубопроводов между датчиком и воздухозаборными отверстиями соответствующих контролируемых зон и скорость потока проб воздуха в системе всасывающих трубопроводов и/или в соответствующих отрезках системы всасывающих трубопроводов между датчиком и воздухозаборными отверстиями соответствующих контролируемых зон. Однако другие параметры, от которых зависит теоретически рассчитанное время пребывания проб воздуха, несомненно, также возможны.
Один преимущественный вариант реализации устройства изобретения обеспечен устройством, дополнительно имеющим контроллер, который координирует во времени всасывающее устройство и продувающее устройство в соответствии с сигналами, сгенерированными, по меньшей мере, одним датчиком при детектировании, по меньшей мере, одного параметра пожара в пробах воздуха.
Упомянутый контроллер желательно должен быть выбран из условия, что всасывающее устройство в первую очередь установлено для выполнения постоянного удаления проб воздуха, отображающих состояние воздушной среду помещения отдельных контролируемых зон через общую систему всасывающих трубопроводов. Далее если датчик детектирует, по меньшей мере, один параметр пожара в отобранных пробах воздуха и таким образом отправляет соответствующий сигнал контроллеру, то в ответ этому контроллер отправляет соответствующий сигнал всасывающему устройству для того, чтобы его выключить, посредством чего в то же время или прямо после этого дополнительный сигнал подается контроллером на продувающее устройство для того, чтобы его включить и продуть отобранные пробы воздуха, находящиеся внутри системы всасывающих трубопроводов. В соответствии с изобретением спустя фиксированное время контроллер имеет возможность отправить другой сигнал продувающему устройству для того, чтобы его выключить, и в то же время или непосредственно после контроллер подает сигнал для того, чтобы возобновить постоянный отбор проб воздуха, отображающих состояние воздушной среды помещения отдельных контролируемых зон через систему всасывающих трубопроводов. Фиксированное время, в течение которого продувающее устройство активировано, - это время, определенное теоретически на основе параметров устройства и сохраненное в памяти, или это время, определенное при помощи измеренной величины скорости потока пробы воздуха в системе всасывающих трубопроводов во время постоянного отбора соответствующих проб воздуха из отдельных контролируемых зон.
Особенно предпочтительным вариантом реализации устройства изобретения является наличие дополнительно устройства памяти, в котором могут быть сохранены значения времен пребывания проб воздуха. Сохраненные в этой памяти значения могут быть, например, временами пребывания проб воздуха, определенными во время режима автоматической настройки, основываясь на максимальном времени пребывания проб воздуха и конфигурации трубопроводов.
Особенно предпочтительным, в соответствии с изобретением, является устройство, которое содержит, по меньшей мере, один дымовой генератор, расположенный вблизи воздухозаборного устройства, и который может искусственно сгенерировать параметр пожара в целях настройки и тестирования устройства обнаружения пожара. Это дает возможным во время работы устройства обнаружения пожара установить режим работы самообучения для того, чтобы обнаружить сгенерированный дым при помощи генератора дыма, находящегося наиболее далеко у воздухозаборного устройства, и время пребывания проб воздуха искусственно созданного дыма, искусственно созданного параметра пожара соответственно. Таким образом, это позволяет измерить максимальное время пребывания проб воздуха, основываясь на котором и принимая во внимания конфигурацию трубопроводов, можно вычислить времена пребывания проб воздуха для всех воздухозаборных отверстий. Несомненно, здесь также возможно, что дымовой генератор может быть расположен у другого воздухозаборного отверстия, и соответственно множество дымовых генераторов могут быть расположены у различных воздухозаборных отверстий.
В одной возможной реализации устройство, согласно изобретению, дополнительно содержит датчик для измерения скорости потока проб воздуха в системе всасывающих трубопроводов. В этом случае это дает преимущественную возможность определения скорости потока отобранных проб воздуха в системе всасывающих трубопроводов для того, чтобы вычислить, основываясь на этом, время, необходимое для продувающего устройства, чтобы полностью продуть находящиеся в системе всасывающих трубопроводов пробы воздуха. Определенная с помощью датчика скорость потока может также использоваться в расчетах времен пребывания проб воздуха соответствующих воздушной среде помещения отдельных контролируемых зон в течение повторного отбора соответствующих проб воздуха из упомянутых отдельных контролируемых зон. Примеры датчиков измерения скорости потока известны из уровня техники и включают датчики, основанные на принципе пленочной и/или проволочной анемометрии. Кроме того, также будет возможным определить скорость потока, основываясь на теоретических параметрах устройства взамен измерения скорости потока датчиком. Здесь также будет возможным только включение датчика на измерение скорости потока во время режима самообучения при запуске устройства.
Особенно предпочтительным является наличие процессора для оценивания выдаваемых сигналов, по меньшей мере, одним датчиком в то время, когда датчик детектирует параметр пожара в пробе воздуха и контроллер генерирует управляющий сигнал для всасывающего и/или продувающего устройства. В связи с этим процессор преимущественно сконфигурирован таким образом, что он, основываясь на сигнале, определяет время пребывания пробы воздуха, соответствующей состоянию воздушной среды соответствующего помещения отдельной контролируемой зоны при постоянно возобновляемом отборе из каждой отдельной контролируемой зоны через систему всасывающих трубопроводов для того, чтобы таким образом определить место пожара или место развивающегося пожара. Определение результирующего времени пребывания проб воздуха, таким образом, выполняется процессором путем сравнения результативного времени пребывания проб воздуха с соответствующими временами пребывания проб воздуха, вычисленными теоретически для отдельных контролируемых зон. Теоретически вычисленные времена пребывания проб воздуха могут зависеть, например, от длины соответствующих отрезков системы всасывающих трубопроводов между датчиком и соответствующими контролируемыми зонами, эффективного потокового поперечного сечения системы всасывающих трубопроводов и/или соответствующих отрезков системы всасывающих трубопроводов между датчиком и соответствующими контролируемыми зонами, и скорости потока проб воздуха в системе всасывающих трубопроводов и/или в соответствующих отрезках системы всасывающих трубопроводов между датчиком и воздухозаборными отверстиями соответствующих контролируемых зон. Анализируя времена пребывания проб воздуха, становится возможным определить место пожара.
Выгодный вариант реализации устройства изобретения предусматривается для диаметров и/или форм поперечного сечения отдельных воздухозаборных отверстий, сконфигурированных в зависимости от соответствующих контролируемых зон.
Возможным вариантом здесь для контролируемых зон, удаленно расположенных от всасывающего/продувающего устройства, будет использование воздухозаборных отверстий с бóльшим поперечным сечением, чем для контролируемых зон, расположенных ближе к всасывающему/продувающему устройству. Соответствующее расстояние от контролируемых зон до всасывающего/продувающего устройства определяется расстоянием, которое должна пройти проба воздуха в системе всасывающих трубопроводов от соответствующего воздухозаборного отверстия в соответствующей контролируемой зоне до всасывающего устройства. Соответствующая форма поперечного сечения или размера поперечного сечения отдельного воздухозаборного отверстия спроектирована таким образом, что они создают перепад давления в имеющей место системе всасывающих трубопроводов. Согласно изобретению вариант реализации воздухозаборных отверстий позволяет устройству изобретения быть одинаково чувствительным при обнаружении пожара и определении места пожара для каждой из множества контролируемых зон. В одной возможной реализации отдельные воздухозаборные отверстия в системе всасывающих трубопроводов могут быть адаптированы к заданным условиям установки системы трубопроводов в зданиях. Будет также возможным, например, вначале сконфигурировать все воздухозаборные отверстия одного размера, имеющие одинаковую форму поперечного сечения, при этом соответствующим воздухозаборным отверстиям после установки определяется добавить соответствующую апертурную диафрагму. Подходящим здесь будет, например, перфорированная пленка или перфорированная насадка, при этом размер отверстий в пленке или насадке будет адаптирован к заданной пространственной обстановке. Несомненно, другие варианты реализации также возможны. Также возможным была бы такая конфигурация системы всасывающих трубопроводов, что форма поперечного сечения в системе всасывающих трубопроводов была бы различной в соответствии с условиями установки.
Особенно преимущественная реализация обеспечивается при конфигурировании всасывающего и продувающего устройства вместе как одного вентилирующего устройства. Упомянутое вентилирующее устройство, таким образом, спроектировано так, что оно меняет направление перемещаемого воздуха в ответ на поступающий сигнал от контроллера. Таким образом, это позволяет дополнительно уменьшить число компонентов устройства изобретения, что преимущественно приводит к уменьшению стоимости производства устройства в соответствии с изобретением.
Для того чтобы дополнительно уменьшить число компонентов устройства обнаружения пожара и определения его места в соответствии с изобретением, всасывающее и продувающее устройство преимущественно сконфигурированы вместе как одно вентилирующее устройство, при этом упомянутое вентилирующее устройство имеет возможность реверсивного вращения.
Дополнительная реализация устройства в соответствии с изобретением, в котором всасывающее устройство и продувающее устройство сконфигурированы вместе как одно вентилирующее устройство, предусматривает для вентилирующего устройства быть вентилятором, имеющим соответствующие вентиляционные лопасти для того, чтобы менять направление перемещаемого воздуха. Иные варианты реализации здесь, несомненно, также возможны.
Как отмечено выше, устройство изобретения содержит индикаторные элементы, которые определяют место пожара в одной из контролируемых зон. Эти индикаторные элементы могут быть расположены вблизи входов в эти зоны или вблизи устройства обнаружения пожара соответственно. Средство связи или один входящий компонент для соединения по каналу связи с центральным постом системы пожарной сигнализации используется для передачи информации о месте пожара центральному посту для того, чтобы его отобразить, например, открытым текстом на пульте управления (например, «Пожар в зоне X»). Дополнительно или взамен индикаторным элементам устройство изобретения может дополнительно содержать устройство связи, которое передает информацию, касающуюся начинающегося и/или имеющегося пожара в одной или нескольких контролируемых зонах, удаленному устройству, такому, как, например, центральный пост системы пожарной сигнализации или пункт управления пожарными командами. В зависимости от применения, устройство связи, таким образом, предпочтительно представлено проводной или беспроводной связью с возможностью генерирования соответствующего сигнала, по меньшей мере, одному соединенному приемнику, расположенному на расстоянии от устройства изобретения при появлении такой необходимости. Упомянутое устройство связи, несомненно, может также быть управляемо извне, например, для того, чтобы изменить или протестировать рабочий режим устройства. Инфракрасная технология будет также подходящей в качестве возможного средства связи.
Далее приведены ссылки на чертежи, описывающие предпочтительный вариант реализации устройства изобретения с подробной детализацией.
На фиг.1 представлено схематичное изображение варианта реализации устройства изобретения для обнаружения пожара и определения места пожара в одной выделенной контролируемой зоне из множества контролируемых зон; и
на фиг.2 изображены графики а, b динамики сигналов.
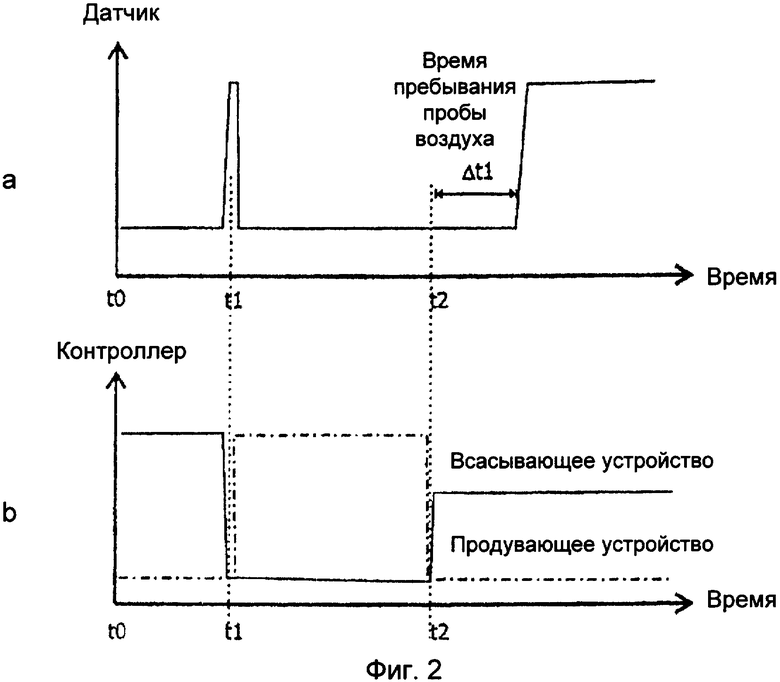
На фиг.1 представлено схематичное изображение предпочтительного варианта реализации устройства изобретения для обнаружения пожара и определения его места в одной выделенной контролируемой зоне (R1, R2, ..., Rn) из множества контролируемых зон (R1, R2, ..., Rn). Устройство изобретения в соответствии с фиг.1 включает в себя центрально расположенное аспирационное устройство обнаружения пожара, способное точно определить место пожара. В варианте реализации, как изображено, устройство используется для мониторинга четырех отдельных контролируемых зон (R1, R2, R3, Rn). Таким образом, это предусматривает для каждой единичной пробы (6) воздуха, отображающей состояние воздушной среды помещения соответствующей контролируемой зоны (R1, ..., R4), постоянный отбор проб воздуха из соответствующих контролируемых зон (R1, ..., R4) через общую систему (3) всасывающих трубопроводов. В добавление, всасывающее устройство (5) сконфигурировано в качестве вентилирующего устройства, расположенного в одном конце системы (3) всасывающих трубопроводов. Пробы (6) воздуха, отобранные через общую систему (3) всасывающих трубопроводов при помощи всасывающего устройства (5), перемещаются к датчику или множеству датчиков (7) для детектирования одного или более параметров пожара. Было бы желательным в этом рассмотрении расположить всасывающее устройство (5) вместе с датчиком (7) в одном корпусе (2).
Датчик (7) используется для анализа проб (6) воздуха, каждая из которых отображает состояние воздушной среды контролируемых зон (R1, ..., R4), пройденных через систему (3) всасывающих трубопроводов для определения параметра пожара. В качестве датчика (7) подходящим может быть любое устройство, известное из уровня техники. В случае появления пожара в одной из контролируемых зон (R1, ..., R4) или в случае, когда воздушная среда помещения контролируемой зоны (R1, ..., R4) содержит параметры пожара, и датчик (7) детектирует упомянутые параметры пожара в отобранных пробах (6) воздуха, последний отправляет соответствующий сигнал на контроллер (9).
В ответ на сигнал контроллер (9) отправляет соответствующий управляющий сигнал на всасывающее устройство (5) для того, чтобы его выключить. В то же время или сразу после этого контроллер (9) отправляет дополнительный сигнал продувающему устройству для его включения. Упомянутое продувающее устройство (8) преимущественно расположено так, что во время работы оно продувает пробы (6) воздуха, уже отобранные и еще находящиеся в системе (3) всасывающих трубопроводов. Особенно преимущественным видом в варианте реализации, как изображено, всасывающее устройство (5) и продувающее устройство (8) сконфигурированы вместе как одно вентилирующее устройство (11), которое меняет направление перемещения воздуха в ответ на сигнал, отправленный контроллером (9). Например, вентилирующим устройством может быть реверсивно вращающийся вентилятор, также возможным может быть наличие у вентилирующего устройства (11) вентилятора с вентилирующими лопастями. Во время продувания системы всасывающих трубопроводов вентилирующее устройство (8) приносит свежий воздух, т.е. воздух извне, навстречу отдельным воздухозаборным отверстиям (4) соответствующих контролируемых зон (R1 ,..., R4). Упомянутый свежий воздух, таким образом, перемещает пробы (6) воздуха в системе (3) всасывающих трубопроводов, которые, например, выдуваются обратно в контролируемые зоны (R1, ..., R4) через соответствующие воздухозаборные отверстия (4).
В соответствии с изобретением контроллер (9) спроектирован так, что он отправляет дополнительный сигнал вентилирующему устройству (8) после того, как все пробы (6) воздуха продуты из системы (3) всасывающих трубопроводов для того, чтобы его выключить. В это же время или сразу после этого контроллер (9) повторно активирует всасывающее устройство (5). Таким образом, пробы (6) воздуха, отображающие состояние воздушной среды помещения отдельных контролируемых зон (R1, ..., R4), повторно отбираются из отдельных контролируемых зон (R1, ..., R4) через систему (3) всасывающих трубопроводов и перемещаются к датчику (7). Упомянутый датчик (7) детектирует наличие параметров пожара в отобранных пробах (6) воздуха спустя определенный период времени с момента перезапуска всасывающего устройства (5). Время, пройденное между возобновившиеся работой всасывающего устройства (5) и начальным детектированием параметров пожара в повторно отобранных пробах (6) воздуха, определяет так называемое время пребывания проб воздуха, которое используется в качестве основания для определения места пожара.
Процессор (10) обеспечивает вычисление времени пребывания проб воздуха, определяемого при сравнении выявленного времени пребывания проб воздуха со временами пребывания проб воздуха, вычисленными теоретически. Теоретически вычисленные времена пребывания проб воздуха стоят в прямой зависимости от расстояния между датчиком (7) и воздухозаборными отверстиями (4) отдельных контролируемых зон (R1, ..., R4), так как они зависят, по меньшей мере, от одного следующего параметра: длина системы (3) всасывающих трубопроводов между датчиком (7) и воздухозаборными отверстиями (4) соответствующих контролируемых зон (R1, ..., R4); эффективное потоковое поперечное сечение системы (3) всасывающих трубопроводов между датчиком (7) и воздухозаборными отверстиями (4) соответствующих контролируемых зон (R1, ..., R4); и скорость потока проб (6) воздуха в системе (3) всасывающих трубопроводов. Таким образом, зная, по меньшей мере, длину соответствующих отрезков системы (3) всасывающих трубопроводов между датчиком (7) и воздухозаборными отверстиями (4) соответствующих контролируемых зон (R1, ..., R4) и скорость потока проб (6) воздуха через систему (3) всасывающих трубопроводов, становится возможным определить место пожара, основываясь на измеренном времени пребывания проб воздуха.
Предпочтительным вариантом реализации устройства изобретения является дополнительно наличие датчика (12), измеряющего скорость потока проб (6) воздуха в системе (3) всасывающих трубопроводов. Измеренные скорости потока используются процессором (10) для оценивания измеренных времен пребывания проб воздуха. Однако также возможно отказаться от датчика (12) для измерения скорости потока, при этом скорость потока определяется, основываясь на таких параметрах устройства, как, например, эффективное потоковое поперечное сечение системы (3) всасывающих трубопроводов, всасывающая способность всасывающего устройства (5), форма поперечного сечения и поперечное сечение отверстий воздухозаборных отверстий (4).
Также возможно для устройства обнаружения пожара определение времени пребывания проб воздуха в самообучающемся режиме и, основываясь на этом, вычисление всех соответствующих времен пребывания проб воздуха, сохранение их в таблице памяти.
На фиг.2 представлены схематичные графики а и b, изображающие сигналы, сгенерированные датчиком (7) или контроллером (9) для управления всасывающим устройством (5) и продувающим устройством (8). Ось абсцисс здесь отображает время, а ось ординат отображает сигнал датчика (7) или управляющий сигнал контроллера (10). В интервале времени от t0 до t1 всасывающее устройство (5) управляется контроллером (10) для того, чтобы быть постоянно активированным; т.е., отбираются пробы (6) воздуха из контролируемых зон (R1, ..., R4). Пунктирная линия используется для отображения этого процесса на фиг.2(b). В момент времени t1 датчик (7) детектирует наличие параметра пожара в отобранных пробах воздуха (6). В ответ на отправленный датчиком (7) сигнал в момент времени t1 всасывающее устройство (5) выключается и одновременно продувающее устройство (8) активируется. Период продувания соответствует периоду времени от t1 до t4, который зависит от мощности продувающего устройства (8) и определенных параметров системы (3) всасывающих трубопроводов.
После того как все пробы (6) воздуха продуты из системы (3) всасывающих трубопроводов в момент времени t2, контроллер (9) деактивирует продувающее устройство (8) и одновременно повторно активирует всасывающее устройство (5). В датчик (7) затем снова поступает пробы (6) воздуха соответственно. Решающим для определения места пожара теперь является время пребывания проб воздуха от t1 до t4. Время пребывания проб воздуха (t1, ..., t4) соответствует периоду времени от точки t2, в которой всасывающее устройство (5) повторно активировано, до периода времени от t3 до t6, в котором датчик (7) снова детектирует параметр пожара в отобранных пробах (6) воздуха. Упомянутые времена пребывания проб воздуха (t1, ..., t4) являются индивидуальными в отдельных контролируемых зонах (R1, ..., R4) и используются для последующего анализа расположения места пожара.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2824471C1 |
| СПОСОБ МНОГОФАКТОРНОГО КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2692926C1 |
| УСТРОЙСТВО АНАЛИЗА ЛЕТУЧИХ ОРГАНИЧЕСКИХ СОЕДИНЕНИЙ В СОСТАВЕ ВЫДЫХАЕМОГО ЧЕЛОВЕКОМ ВОЗДУХА | 2024 |
|
RU2831491C1 |
| Система автоматического выявления перегревов элементов электрооборудования, включающая несколько сенсоров, способ ее использования и испытания | 2023 |
|
RU2817861C1 |
| Система автоматического выявления перегревов элементов электрооборудования с применением сенсора сравнения, способ ее использования и испытания | 2023 |
|
RU2816828C1 |
| БЛОК ДЕТЕКТИРОВАНИЯ ЛЕТУЧИХ ОРГАНИЧЕСКИХ СОЕДИНЕНИЙ В СОСТАВЕ ВЫДЫХАЕМОГО ЧЕЛОВЕКОМ ВОЗДУХА | 2024 |
|
RU2831639C1 |
| СИСТЕМА И СПОСОБЫ ПОЖАРОТУШЕНИЯ | 2019 |
|
RU2730962C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДЫМА ВСАСЫВАЮЩЕГО ТИПА | 2011 |
|
RU2575206C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И ИНТЕЛЛЕКТУАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2006 |
|
RU2344859C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПОЖАРОТУШЕНИЯ В ГОРЯЧЕМ ПРОХОДЕ/ХОЛОДНОМ ПРОХОДЕ ЦЕНТРА ОБРАБОТКИ ДАННЫХ | 2012 |
|
RU2609215C2 |
Изобретение относится к способу и устройству для обнаружения и определения места источников пожара в одной или более контролируемой зоне (R1,...,Rn), использующему систему (3) всасывающих трубопроводов, соединяющих множество контролируемых зон (R1,...,Rn), которые соединены с каждой отдельной контролируемой зоной (R1,...,Rn) при помощи, по меньшей мере, одного воздухозаборного отверстия (4), всасывающее устройство (5) для отбора проб (6) воздуха, отображающих состояние воздушной среды помещения отдельной контролируемой зоны (R1,...,Rn) из отдельных контролируемых зон (R1,...,Rn) при помощи системы (3) всасывающих трубопроводов и воздухозаборных отверстий (4), и датчика (7) для детектирования, по меньшей мере, одного параметра пожара в пробах (6) воздуха отобранных через систему (3) всасывающих трубопроводов, при этом устройство изобретения включает в себя продувающее устройство (8) для продува проб (6) воздуха, отобранных внутрь системы (3) всасывающих трубопроводов, когда датчик (7) детектирует, по меньшей мере, один параметр пожара в отобранных пробах (6) воздуха. Определение места пожара при помощи измерения времени пребывания проб (6) воздуха, повторно отобранных с параметром пожара. Технический результат - возможность обнаружения действительного места пожара. 3 н. и 24 з.п. ф-лы, 2 ил.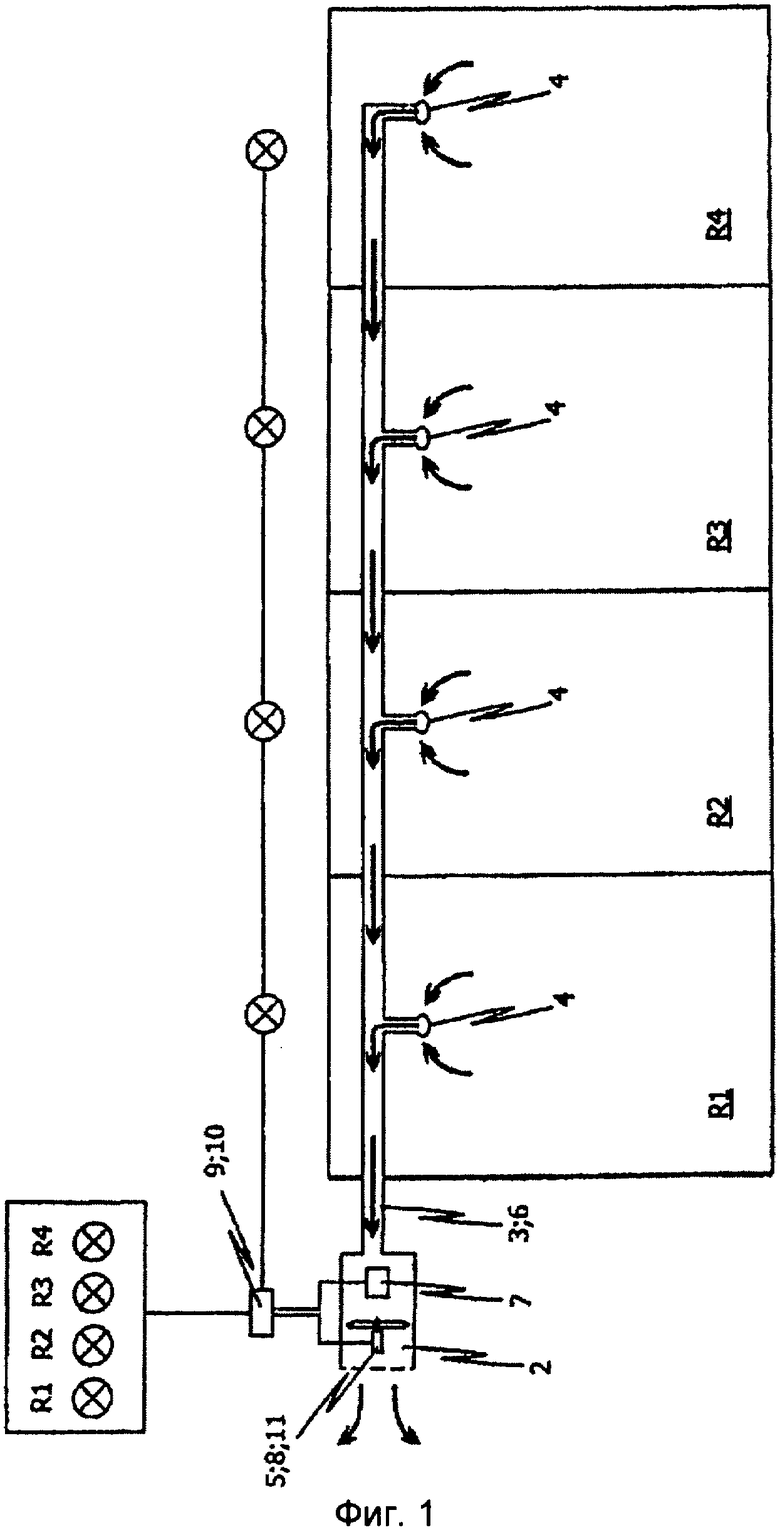
a) отбор проб (6) воздуха в каждом случае отображающих состояние воздушной среды помещения отдельных контролируемых зон (R1,...,Rn) из упомянутых отдельных контролируемых зон (R1,...,Rn) через общую систему (3) всасывающих трубопроводов;
b) детектирование, по меньшей мере, одного параметра пожара в пробах (6) воздуха отобранных через систему (3) всасывающих трубопроводов, по меньшей мере, одним датчиком (7) для детектирования параметров пожара;
характеризующиеся следующими этапами:
c) продувание отобранных проб (6) воздуха внутри системы (3) всасывающих трубопроводов при помощи продувающего или всасывающего/продувающего устройства (8);
d) повторный отбор проб (6) воздуха из отдельных контролируемых зон (R1,...,Rn) через систему (3) всасывающих трубопроводов, по меньшей мере, до тех пор, пока, по меньшей мере, один датчик (7) повторно не детектирует параметр пожара в пробах (6) воздуха и определение времени, пройденного между началом повторного отбора проб (6) воздуха и повторным детектированием параметра пожара в повторно отобранных пробах воздуха, при этом упомянутое время, которое проходит между началом повторного отбора проб (6) воздуха и повторным детектированием параметра пожара в повторно отобранных пробах (6) воздуха, является временем пребывания соответствующих проб (6) воздуха, отображающих воздушную среду отдельных контролируемых зон (R1,...,Rn);
e) оценивание времени пребывания, определенного из этапа d) для того, чтобы определить место пожара или место начинающегося пожара в одной из множества контролируемых зон (R1,...,Rn); и
f) генерация сигнала, указывающего на развивающийся и/или имеющийся пожар в одной или более контролируемой зоне (R1, R2,...,Rn), при этом сигнал содержит дополнительную информацию для точной конкретизации места пожара в упомянутой одной или более контролируемых зонах (R1, R2,...,Rn).
а1) определение скорости потока проб (6) воздуха в системе (3) всасывающих трубопроводов во время постоянного отбора соответствующих проб (6) воздуха из отдельных контролируемых зон (R1,...,Rn); и
а2) вычисление времени, необходимого для полного продува проб (6) воздуха сосредоточенных в системе (3) всасывающих трубопроводов.
d1) определение скорости потока проб (6) воздуха в системе (3) всасывающих трубопроводов во время возобновляемого отбора соответствующих проб (6) воздуха из отдельных контролируемых зон (R1,...,Rn); и
d2) вычисление времени пребывания соответствующих проб (6) воздуха отображающих состояние воздушной среды помещения определенных контролируемых зон (R1,...,Rn).
d1) определение скорости потока проб (6) воздуха в системе (3) всасывающих трубопроводов во время возобновляемого отбора соответствующих проб (6) воздуха из отдельных контролируемых зон (R1,...,Rn); и
d2) вычисление времени пребывания соответствующих проб (6) воздуха отображающих состояние воздушной среды помещения определенных контролируемых зон (R1,...,Rn).
i) искусственно генерируется параметр пожара у воздухозаборного отверстия (4) наиболее далеко расположенной контролируемой зоны (Rn) от, по меньшей мере, одного датчика (7) в течение всего времени процедуры автоматической настройки;
и) всасывание проб (6) воздуха из отдельных контролируемых зон (R1,...,Rn) через общую систему (3) всасывающих трубопроводов до того, как, по меньшей мере, один датчик (7) детектирует искусственно сгенерированный параметр пожара в отобранных пробах (6) воздуха;
iii) выдувание отобранных проб (6) воздуха, сосредоточенных в системе (3) всасывающих трубопроводов, при помощи продувающего или всасывающего/продувающего устройства (8);
iv) возобновляемый отбор проб (6) воздуха из отдельных контролируемых зон (R1,...,Rn) через общую систему (3) всасывающих трубопроводов, по меньшей мере, до того, как датчик (7) повторно детектирует искусственно сгенерированный параметр пожара в пробах (6) воздуха и определение времени, пройденного между началом повторного отбора проб (6) воздуха и повторным детектированием искусственно сгенерированного параметра пожара в повторно отобранных пробах (6) воздуха, при этом упомянутое время, которое проходит между началом повторного отбора проб (6) воздуха и повторным детектированием искусственно сгенерированного параметра пожара в повторно отобранных пробах (6) воздуха, является временем пребывания соответствующих проб (6) воздуха отображающих воздушную среду в наиболее далеко расположенной контролируемой зоне (Rn);
v) оценивание времени пребывания, определенного из этапа iv) для того, чтобы определить максимальное время пребывания проб (6) воздуха для системы всасывающих трубопроводов;
vi) вычисление времен пребывания проб воздуха для соответствующих проб (6) воздуха отображающих состояние воздушной среды помещений отдельных контролируемых зон (R1,...,Rn) основываясь на максимальных временах пребывания проб (6) воздуха, определенных в этапе v), и конфигурацию системы (3) всасывающих трубопроводов, в частности расстояние между воздухозаборными отверстиями (4), диаметр системы всасывающих трубопроводов и диаметр воздухозаборных отверстий (4); и
vii) сохранение времен пребывания соответствующих проб (6) воздуха, вычисленных по способу из этапа vi), в таблице.
viii) использование корректирующей функции к вычисленным временам пребывания проб (6) воздуха, сохраненным в таблице, для того, чтобы скорректировать значения времен пребывания проб (6) воздуха имеющие место для определенных контролируемых зон (R1,...,Rn).
| DE 10125687 А, 19.12.2002 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| DE 3237021 C2, 05.05.1981 | |||
| WO 00/68909, 16.11.2000 | |||
| УБЕЖИЩЕ | 2018 |
|
RU2670010C1 |
| Способ определения места возникновения пожара | 1975 |
|
SU538290A1 |
| Способ распознавания ранних стадий экзогенных пожаров | 1986 |
|
SU1458596A1 |
| Система пожаротушения | 1989 |
|
SU1692596A1 |
| Способ обнаружения эндогенных пожаров в угольных шахтах | 1986 |
|
SU1328546A1 |

