Изобретение относится к радиосвязи и может быть использовано для формирования требуемых АЧХ и ФЧХ фазоманипулированных, амплитудно-манипулированных, а также амплитудно-фазоманипулированных сигналов в заданной полосе частот и преобразования частоты (переноса спектра входного сигнала по оси частот).
Известен способ манипуляции (модуляции) параметров отраженного сигнала, состоящий в том, что входное сопротивление устройства манипуляции изменяют таким образом, что коэффициент отражения этого устройства изменяет фазу на π, π/2, π/4, причем для разделения входного и отраженного сигнала используют циркулятор [Радиопередающие устройства. / Под редакцией О.А.Челнокова - М.: Радио и связь, 1982, стр.152-156]. Известно устройство реализации этого способа [там же], состоящее из циркулятора, первый вход которого подключен к источнику сигнала, третий вход подключен к нагрузке, а второй подключен к отрезку разомкнутой линии передачи длиной λ/4, в начале которой включен p-i-n диод.
Если диод закрыт, то от сечения, в котором он включен, происходит отражение, отраженная волна попадает в нагрузку с сопротивлением 50 Ом. Если диод открыт, то отражение происходит от конца линии. Фаза отраженного сигнала в одном состоянии диода отличается от фазы отраженного сигнала в другом состоянии диода на π. При необходимости изменения разности фаз длина отрезка линии передачи изменяется соответствующим образом.
Недостатком этого способа и устройства его реализации является то, что в двух состояниях диода изменяется только фаза отраженного сигнала, причем заданные значения разности фаз отраженного сигнала в двух состояниях диода обеспечиваются только на одной фиксированной частоте. Другим недостатком является постоянство амплитуды отраженного сигнала в двух состояниях диода, то есть отсутствие манипуляции амплитуды, что сужает функциональные возможности. Например, это не позволяет обеспечить два канала радиосвязи на одной несущей частоте (один канал можно образовать с помощью манипуляции амплитуды, а другой - с помощью манипуляции фазы или не позволяет обеспечить кодировку передаваемой информации). Третьим недостатком следует считать большие массы и габариты, связанные с необходимостью использования отрезков линии передачи. Четвертым недостатком является то, что устройство манипуляции, состоящее из управляемой и неуправляемой частей, включается между источником сигнала и нагрузкой, которые имеют определенные значения сопротивлений. Источник сигнала имеет чисто действительное сопротивление (второй вход). Нагрузка для отраженного сигнала (третий вход) имеет также действительное сопротивление. Манипулятор подключен к разомкнутой (бесконечное сопротивление) или к замкнутой (нулевое сопротивление) линии передачи. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы проходного сигнала. Основным недостатком является отсутствие возможности усиления сигнала с заданными коэффициентами усиления в двух состояниях.
Известен способ манипуляции фазы отраженного сигнала, основанный на использовании двухимпедансных устройств СВЧ [В.Г.Соколинский, В.Г.Шейнкман. Частотные и фазовые модуляторы и манипуляторы. - М.: Радио и связь, 1983, стр.146-158]. Известно устройство реализации этого способа [там же], состоящее из определенного количества реактивных элементов типа L, С, параметры которых выбраны из условия обеспечения требуемой произвольной разности фаз коэффициента отражения.
По сравнению с предыдущим способом и устройством данный способ и устройство его реализации не требуют использования полупроводниковых диодов только в открытом и только закрытом состояниях. При любых состояниях диодов, определяемых двумя уровнями низкочастотного управляющего воздействия, при определенных значениях параметров типа L, С может быть обеспечено заданное значение разности фаз отраженного сигнала на фиксированной частоте. Если амплитуда управляющего низкочастотного сигнала между указанными двумя уровнями изменяется непрерывно, то обеспечивается модуляция.
Недостатком является то, что, как и первые способ и устройство, манипулятор может быть включен только между определенными сопротивлениями. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы и не усиливают амплитуду проходного сигнала с заданными коэффициентами усиления в двух состояниях.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ [Головков А.А. Устройство для модуляции отраженного сигнала. Авт. св-во №1800579 от 09.10 1992 года], состоящий в том, что неуправляемую часть (согласующе-фильтрующее устройство) формируют из определенным образом соединенных между собой двухполюсников, сопротивление каждого двухполюсника выбирают из условия обеспечения одинакового заданного двухуровневого закона изменения амплитуды и фазы отраженного сигнала при изменении управляемого элемента из одного состояния в другое под действием управляющего низкочастотного напряжения или тока.
Известно устройство (прототип) реализации способа [там же], содержащее циркулятор, первое и третье плечи которого являются СВЧ-входом и выходом, а во второе плечо включены реактивный четырехполюсник и полупроводниковый диод, подключенный к источнику низкочастотного управляющего воздействия, при этом четерехполюсник выполнен в виде Т-образного соединения двухполюсников со значениями реактивных сопротивлений, которые выбраны из условия обеспечения требуемых законов двухуровневого изменения амплитуды и фазы отраженного сигнала на двух заданных частотах. Так же, как и в предыдущем способе и устройстве реализации, возможна модуляция фазы и амплитуды, если управляющий сигнал изменяется непрерывно.
Недостатком является то, что, как и в первых двух способах и устройствах, манипулятор может быть включен только между определенными сопротивлениями. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы проходного сигнала в двух состояниях. Третьим важным недостатком является то, что значения модулей и фаз в каждом из состояний не контролируются. Известно лишь отношение модулей и разность фаз. Четвертым недостатком всех перечисленных способов и устройств является то, что все элементы согласующе-фильтрующих устройств (четырехполюсников) выполнены реактивными, что связано со стремлением разработчиков не вносить дополнительных потерь путем использования резистивных элементов. Однако резистивные элементы, обладая независимостью своих параметров от частоты в довольно широкой полосе частот (от самых низких частот (единицы кГц) до частот порядка 500...800 МГц), могут обеспечить достаточно широкую полосу частот амплитудно-фазовых манипуляторов при незначительном увеличении потерь, которые могут быть учтены при соответствующем параметрическом синтезе четырехполюсников. Согласование и фильтрация с помощью резистивных четырехполюсников возможны при условии, если сопротивления источника сигнала и нагрузки являются комплексными [Головков А.А. Синтез амплитудных и фазовых манипуляторов отраженного сигнала на резистивных элементах с сосредоточенными параметрами. Радиотехника и электроника, 1992 г., №9, с.1616-1622].
Техническим результатом изобретения является обеспечение манипуляции амплитуды и фазы проходного сигнала в двух состояниях управляемого элемента в широкой полосе частот при контролируемых модуле и фазе коэффициента передачи в каждом из состояний, незначительном увеличении потерь путем использования резистивных элементов в согласующих четырехполюсниках и включении манипулятора между источником и нагрузкой с комплексными сопротивлениями.
1. Указанный результат достигается тем, что в способе модуляции амплитуды и фазы радиочастотных сигналов, состоящем в том, что радиочастотный сигнал от источника сигнала подают на модулятор, выполненный из четырехполюсника, управляемого элемента, соединенного с источником двухуровневого низкочастотного управляющего сигнала, изменяют комплексное сопротивление управляемого элемента с одного значения на другое путем переключения низкочастотного управляющего сигнала из одного уровня на другой, изменение сопротивления управляемого элемента приводит к изменению входного и выходного сопротивления модулятора и изменению амплитуды и фазы выходного сигнала, дополнительно двухполюсный управляемый элемент включают между источником сигнала и входом четырехполюсника или между выходом четырехполюсника и нагрузкой в продольную (последовательно) или поперечную (параллельно) цепь, к выходу четырехполюсника подключают нагрузку с комплексной проводимостью для проходных модулированных радиочастотных сигналов, проводимость источника сигнала выбирают комплексной, все двухполюсники четырехполюсника выполняют резистивными, количество двухполюсников выбирают не меньше трех, значения параметров резистивных элементов, формирующих двухполюсники четырехполюсника, выбирают из условия обеспечения заданных фазы коэффициента передачи в первом состоянии и законов изменения амплитуды и фазы проходного сигнала в заданной полосе частот в двух состояниях двухполюсного управляемого элемента, а также из условия достижения значения модуля коэффициента передачи в первом состоянии, при котором обеспечивается физическая реализуемость четырехполюсника.
2. Указанный результат достигается тем, что в устройстве модуляции амплитуды и фазы радиочастотных сигналов, состоящем из источника радиочастотных сигналов, двухполюсного управляемого элемента, четырехполюсника, выполненного из двухполюсников, состоящих из количества элементов, не меньшего двух, значения параметров которых выбраны из условия обеспечения требуемых амплитудно-частотных и фазочастотных характеристик в двух состояниях управляемого элемента, подключенного к источнику низкочастотного управляющего сигнала, дополнительно четырехполюсник выполнен из резистивных двухполюсников, количество которых выбрано не меньше трех, управляемый элемент включен между источником радиочастотных сигналов и входом резистивного четырехполюсника в поперечную цепь, к выходу четырехполюсника подключена нагрузка для проходных модулированных по амплитуде и фазе радиочастотных сигналов с комплексным сопротивлением, при этом значения параметров резистивных элементов, формирующих резистивный четырехполюсник, выбраны из условий обеспечения требуемых фазы (ϕ1) коэффициента передачи в первом состоянии и из условия достижения значения модуля (m1) коэффициента передачи в первом состоянии, при котором обеспечивается физическая реализуемость четырехполюсника, условия обеспечения отношений модулей (m) и разностей фаз (ϕ) коэффициента передачи в двух состояниях управляемого элемента, определяемых двумя крайними значениями низкочастотного управляющего сигнала, которые в математической форме выражаются в следующем виде:
y1,2=g1,2+jb1,2 - заданные значения проводимостей управляемого двухполюсного элемента в двух состояниях (1 и 2), определяемых двумя крайними уровнями низкочастотного управляющего сигнала; zн=rн+jxн, zo=ro+jxo - заданные комплексные сопротивления нагрузки и источника сигнала; Δϕ - заданная величина разностей фаз коэффициентов передачи, обеспечивающая физическую реализуемость и наибольшую полосу частот.
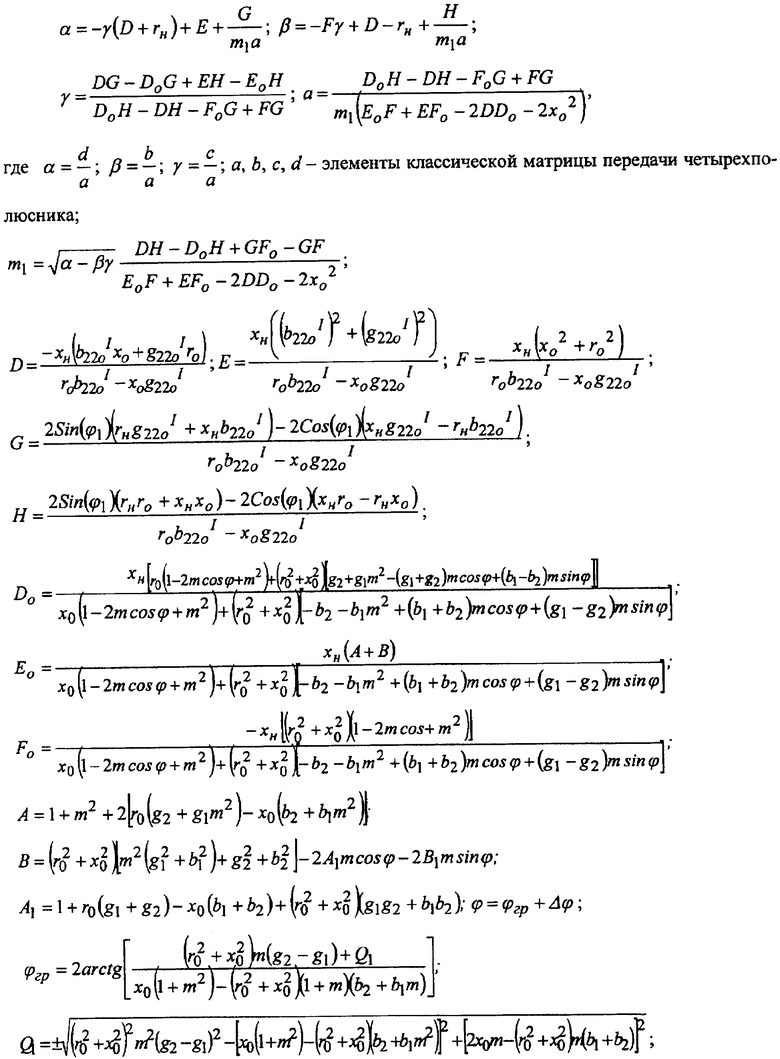
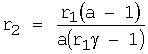
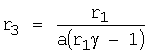
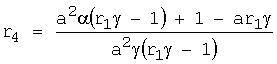
3. Указанный результат достигается тем, что в устройстве модуляции амплитуды и фазы радиочастотных сигналов по п.2 резистивный четырехполюсник выполнен в виде двух каскадно- соединенных Г-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое Г-образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе Г-образное соединение, выбраны из условия обеспечения требуемых модуля и фазы коэффициентов передачи, отношений модулей и разностей фаз коэффициентов передачи в заданной полосе частот в двух состояниях управляемого элемента с помощью следующих математических выражений:
 ;
;  ;
;  ;
;
где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r1 выбирается из условия обеспечения физической реализуемости сопротивлений r2, r3, r4.
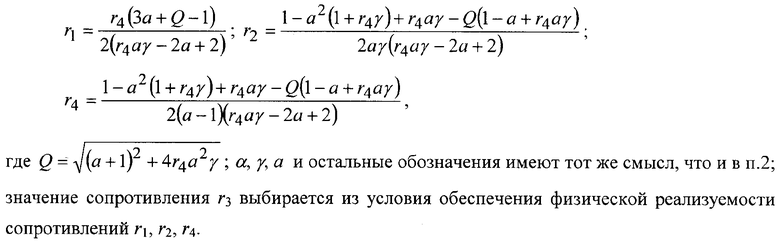
4. Указанный результат достигается тем, что в устройстве модуляции амплитуды и фазы радиочастотных сигналов по п.2 резистивный четырехполюсник выполнен в виде двух каскадно- соединенных  -образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4, двухполюсников, составляющих второе -образное соединение, выбраны из условия обеспечения требуемых модуля и фазы коэффициентов передачи, отношений модулей и разностей фаз коэффициентов передачи в заданной полосе частот в двух состояниях управляемого элемента с помощью следующих математических выражений:
-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4, двухполюсников, составляющих второе -образное соединение, выбраны из условия обеспечения требуемых модуля и фазы коэффициентов передачи, отношений модулей и разностей фаз коэффициентов передачи в заданной полосе частот в двух состояниях управляемого элемента с помощью следующих математических выражений:
 ;
;  ;
;  ;
;
где α, β, γ, a и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r4 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r3.
5. Указанный результат достигается тем, что в устройстве модуляции амплитуды и фазы радиочастотных сигналов по п.2 резистивный четырехполюсник выполнен в виде двух каскадно- соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников, резистивные сопротивления r1, r2, r3 двухполюсников, составляющих П-образное соединение, и резистивные сопротивления r4, r5 двухполюсников, составляющих -образное соединение, выбраны из условия обеспечения требуемых модуля и фазы коэффициентов передачи, отношений модулей и разностей фаз коэффициентов передачи в заданной полосе частот в двух состояниях управляемого элемента с помощью следующих математических выражений:


где α, β, а и остальные обозначения имеют тот же смысл, что и в п.2; значения сопротивлений r3 и r5 выбираются из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
6. Указанный результат достигается тем, что в устройстве модуляции амплитуды и фазы радиочастотных сигналов по п.2 резистивный четырехполюсник выполнен в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников, резистивные сопротивления r1, r2, r3, r4 двухполюсников, составляющих перекрытое Т-образное соединение, выбраны из условия обеспечения требуемых модуля и фазы коэффициентов передачи, отношений модулей и разностей фаз коэффициентов передачи в заданной полосе частот в двух состояниях управляемого элемента с помощью следующих математических выражений:
 ;
;  ;
;
 ,
,
где  ; α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r3, выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
; α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r3, выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
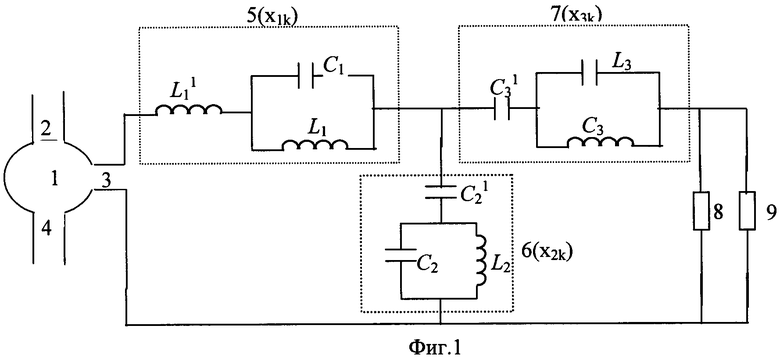
На фиг.1 показана схема устройства модуляции амплитуды и фазы радиочастотных сигналов (прототип).
На фиг.2 показана структурная схема предлагаемого устройства по п.2.
На фиг.3 приведена схема четырехполюсника по п.3, входящая в предлагаемое устройство.
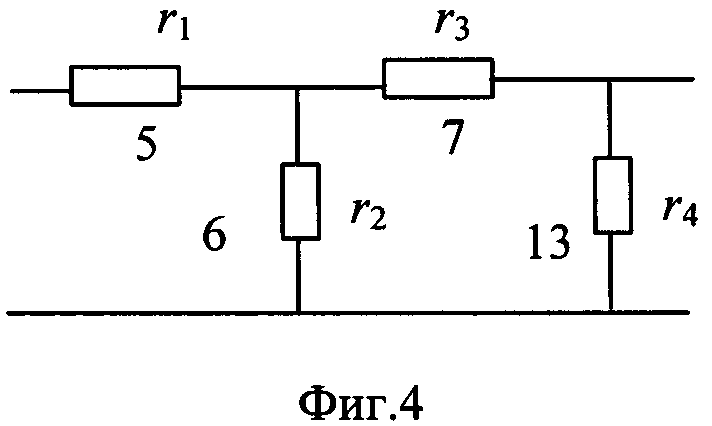
На фиг.4 приведена схема четырехполюсника по п.4, входящая в предлагаемое устройство.
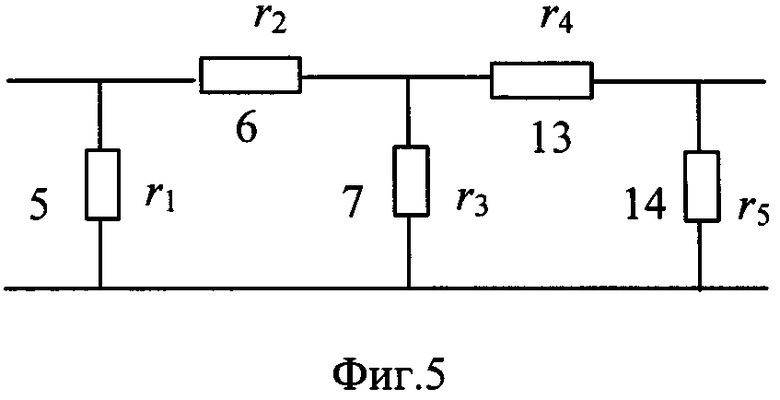
На фиг.5 приведена схема четырехполюсника по п.5, входящая в предлагаемое устройство.
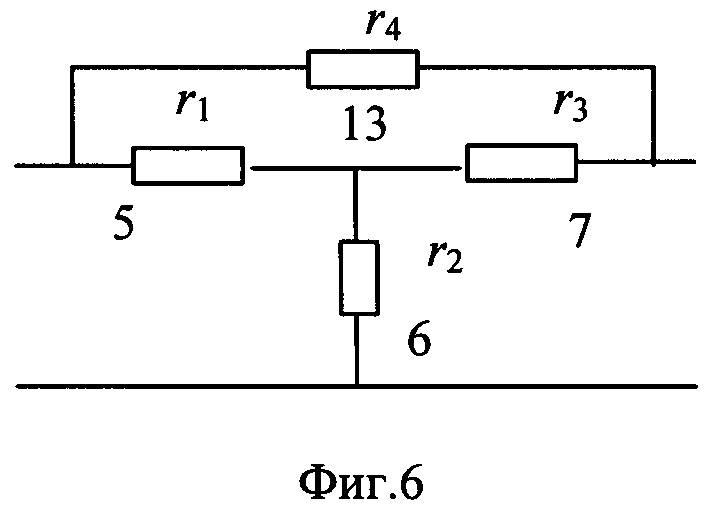
На фиг.6 приведена схема четырехполюсника по п.6, входящая в предлагаемое устройство.
Устройство-прототип содержит циркулятор 1 с входным 2, нагрузочным 3 и выходным 4 плечами, три двухполюсника с реактивными сопротивлениями x1k - 5, х2k - 6, x3k - 7, соединенных между собой по Т-схеме, а также полупроводниковый диод 8, подключенный параллельно к источнику сигнала модуляции 9. Двухполюсник 7 подключен к диоду 8, двухполюсник 5 - к нагрузочному плечу 3 циркулятора 1.
Принцип действия устройства манипуляции параметров сигнала (прототип) состоит в следующем.
Высокочастотный сигнал от источника (на фиг.1 не показан) через входное плечо 2 циркулятора 1 поступает в нагрузочное плечо 3. В результате взаимодействия пришедшего сигнала с реактивными элементами и диодом и благодаря специальному выбору значений реактивных элементов двухполюсников значения фаз и амплитуд отраженных сигналов на двух частотах оказываются такими, что в результате их интерференции на выходное плечо 4 циркулятора 1 поступают сигналы, амплитуда и фаза которых в одном состоянии диода 8, определяемом одним крайним значением сигнала модуляции источника 9, отличаются от амплитуды и фазы этих сигналов в другом состоянии диода 8 на заданные величины на соответствующих двух частотах. Максимальная девиация фазы может составлять 360°, минимальная - ноль, максимальное отношение амплитуд равно ∞. Отношения модулей и разности фаз коэффициента отражения реализуются на обеих частотах одинаковыми.
Высокочастотный сигнал от источника (на фиг.1 не показан) через входное плечо 2 циркулятора 1 поступает в нагрузочное плечо 3. В результате взаимодействия пришедшего сигнала с реактивными элементами и диодом и благодаря специальному выбору значений реактивных элементов двухполюсников значения фаз и амплитуд отраженных сигналов на двух частотах оказываются такими, что в результате их интерференции на выходное плечо 4 циркулятора 1 поступают сигналы, амплитуда и фаза которых в одном состоянии диода 8, определяемом одним крайним значением сигнала модуляции источника 9, отличаются от амплитуды и фазы этих сигналов в другом состоянии диода 8 на заданные величины на соответствующих двух частотах. Максимальная девиация фазы может составлять 360°, минимальная - ноль, максимальное отношение амплитуд равно ∞. Отношения модулей и разности фаз коэффициента отражения реализуются на обеих частотах одинаковыми.
Высокочастотная часть структурной схемы обобщенного предлагаемого устройства по п.2 (фиг.2) состоит из каскадно- соединенных источника сигнала 10, двухполюсного управляемого элемента 8, резистивного четырехполюсника 11 и нагрузки 12.
Предлагаемое устройство модуляции параметров радиочастотных сигналов по п.2 (фиг.2) содержит источник радиочастотных сигналов 10, управляемый двухполюсный элемент 8, подключенный к источнику низкочастотного управляющего сигнала (сигнала модуляции) 9, а также резистивный четырехполюсник 11 (фиг.3), выполненный в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1 (5), r2 (6) двухполюсников составляют первое Г-образное соединение, а резистивные сопротивления r3 (7), r4 (13) двухполюсников составляют второе Г-образное соединение). Управляемый элемент 8 включен параллельно между источником сигнала 10 и двухполюсником 5, т.е. входом резистивного четырехполюсника 11. Двухполюсник 13 подключен к нагрузке.
Это устройство функционирует следующим образом. Благодаря специальному выбору количества резистивных элементов двухполюсников 5, 6, 7, 13 (фиг.3) схемы их соединений и значений их параметров при переключении управляющего (модулирующего) сигнала на управляемом двухполюсном элементе из одного уровня на другой в наибольшей полосе частот. При непрерывном изменении амплитуды управляющего сигнала будет реализована модуляция проходного сигналов по амплитуде и фазе. Сопротивления r2, r3, r4 определяются аналитически по найденным математическим выражениям однозначно. При этом значения этих сопротивлений функциональным образом зависят от произвольно выбираемого значения сопротивления r1 или выбираемого исходя из каких-либо других физических соображений. В предлагаемом изобретении значение сопротивления r1 выбирается из условий обеспечения физически реализуемых значений r2, r3, r4. Значения модуля коэффициента передачи в первом состоянии выбирается из условия обеспечения физической реализуемости четырехполюсника. Значение разности фаз коэффициента передачи в двух состояниях управляемого элемента выбирается из условий достижения наибольшей полосы частот и условий физической реализуемости.
Значения сопротивлений r2, r3, r4 двухполюсников 6, 7, 13, кроме того, зависят от оптимальных значений элементов матрицы передачи 4-х полюсника и заданных комплексных сопротивлений источника сигнала и нагрузки.
При выборе положения двух крайних значений амплитуды управляющего сигнала на краях квадратичного участка вольт-амперной характеристики управляемого элемента и частоты управляющего сигнала соизмеримой с частотой источника сигнала данное устройство функционирует как преобразователь частоты.
Предлагаемое устройство модуляции параметров радиочастотных сигналов по п.4 содержит источник радиочастотных сигналов 10, резистивный четырехполюсник 11 (фиг.4), а также управляемый двухполюсный элемент 8, подключенный к источнику низкочастотного управляющего сигнала (сигнала модуляции) 9. Резистивный четырехполюсник выполнен в виде двух каскадно-соединенных  -образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1, r2 двухполюсников составляют первое - образное соединение, а резистивные сопротивления r3, r4, двухполюсников составляют второе -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.3. Введенный здесь термин "-образное соединение" соответствует общепринятому "обратному Г-образному соединению".
-образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1, r2 двухполюсников составляют первое - образное соединение, а резистивные сопротивления r3, r4, двухполюсников составляют второе -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.3. Введенный здесь термин "-образное соединение" соответствует общепринятому "обратному Г-образному соединению".
Предлагаемое устройство модуляции параметров радиочастотных сигналов по п.5 содержит источник радиочастотных сигналов 10, резистивный четырехполюсник 11 (фиг.5), а также управляемый двухполюсный элемент 8, подключенный к источнику низкочастотного управляющего сигнала (сигнала модуляции) 9. Резистивный четырехполюсник выполнен в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников (резистивные сопротивления r1, r2, r3 двухполюсников составляют П-образное соединение, а резистивные сопротивления r4, r5 двухполюсников составляют -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.3.
Предлагаемое устройство модуляции параметров радиочастотных сигналов по п.6 содержит источник радиочастотных сигналов 10, резистивный четырехполюсник 11 (фиг.6), а также управляемый двухполюсный элемент 8, подключенный к источнику низкочастотного управляющего сигнала (сигнала модуляции) 9. Резистивный четырехполюсник выполнен в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников с сопротивлениями r1, r2, г3, r4. Принцип действия этого устройства аналогичен принципу действия устройства по п.3.
Анализ условий физической реализуемости указанных четырех вариантов выполнения резистивного четырехполюсника (фиг.3 - фиг.6) предлагаемого устройства (фиг.2) показывает, что из этого количества вариантов при произвольных заданных сопротивлений источника сигнала и нагрузки всегда найдется такой вариант, что значения резистивных сопротивлений этого четырехполюсника, рассчитанные по выше приведенным формулам, будут положительными, то есть физически реализуемыми. Наоборот, для каждого отдельно взятого варианта всегда найдутся такие значения сопротивлений источников сигнала и нагрузки, что значения резистивных сопротивлений четырехполюсников, рассчитанные по выше приведенным формулам, окажутся физически реализуемыми.
Докажем возможность реализации указанных свойств.
Пусть комплексные сопротивления нагрузки zн=rн+jxн источника сигнала zo=ro+jxo, a также проводимости двухполюсного управляемого элемента y1,2=g1,2+jb1,2 в двух состояниях известны, то есть известна его классическая матрица передачи:

Резистивный четырехполюсник описывается матрицей передачи:

где  ;
;  ;
;  ; а, b, с, d - элементы классической матрицы передачи четырехполюсника [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с].
; а, b, с, d - элементы классической матрицы передачи четырехполюсника [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с].
Эквивалентная схема манипулятора представляется в виде 4-х каскадно-соединенных четырехполюсников (фиг.2).
Общая нормированная классическая матрица передачи манипулятора имеет вид:

Используя известную связь элементов матрицы рассеяния [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с], получим выражение для коэффициента передачи манипулятора S21 I,II в двух состояниях диода:

где g22o I,II=1+g1,2r0-b1,2x0; b22o I,II=g1,2x0+b1,2r0.
Пусть требуется определить схему резистивного четырехполюсника и значения параметров резистивных элементов двухполюсников, входящих в него, при которых возможно обеспечить заданные отношения модулей m=|S21 I|/|S21 II| и разность фаз φ=arg S21 I-arg S21 II в двух состояниях диода:

Подставим (4) в (5), и после несложных, но громоздких преобразований и разделения комплексного уравнения на действительную и мнимую части получим систему двух алгебраических уравнений:
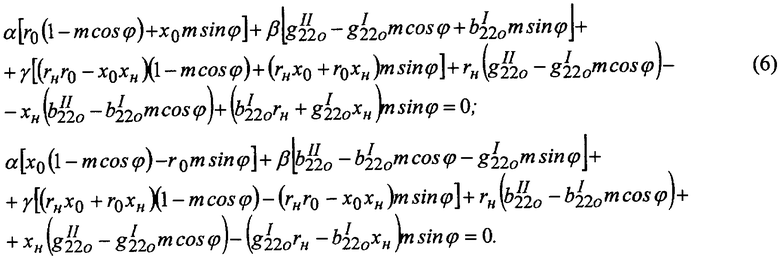
Решение системы (6) имеет вид двух взаимосвязей между элементами искомой матрицы передачи, оптимальных по критерию обеспечения заданного закона изменения (5) на фиксированной частоте:
Поскольку Do 2-EoFo=-xн 2, то границей области физической реализуемости является область изменения φ, которая удовлетворяет условию равенства нулю знаменателя в выражениях для Fo, Е0, Do.
Решение уравнения, вытекающего из этого равенства, дает выражение для граничного значения разности фаз коэффициентов передачи в двух состояниях управляемого элемента:

где 
Как показывают расчеты, при приближении значения разности фаз коэффициентов передачи модулятора в двух состояниях управляемого элемента к значению ϕгр рабочая полоса частот модулятора становится наибольшей. Поэтому значения ϕ следует выбирать из равенства:

где Δϕ - некоторая небольшая добавочная разность фаз, которая обеспечивает физическую реализуемость. При этом чем меньше Δϕ, тем больше полоса частот.
Областью физической реализуемости является область изменения разности фаз φ>φгр при условии xн>0 или φ<φгр при условии xн<0. Для обеспечения этой области физической реализуемости необходимо, чтобы подкоренное выражение в (8) было неотрицательно. Из этого условия находим ограничение на квадрат отношения модулей коэффициентов передачи в двух состояниях управляемого элемента:

где  ;
;
- качество управляемого двухполюсного элемента, включенного в состав манипулятора вместе с резистивным четырехполюсником, источником сигнала и нагрузкой с комплексными сопротивлениями;  - мнимая составляющая проводимости источника сигнала. Понятие "качество управляемого двухполюсного элемента", включенного в состав модулятора амплитуды и фазы с резистивным четырехполюсником, введено здесь впервые по аналогии с качеством управляемого двухполюсного элемента, включенного в состав манипулятора вместе с реактивным четырехполюсником [Kawakami S. Figure of Merit Associated with a Variable Parameter One-Port for RF Switching and Modulation // IEEE Trans: 1965. CT-12. №3. С.320-328; Головков А.А., Минаков В.Г. Взаимосвязи между элементами матрицы сопротивлений и их использование для синтеза согласующе-фильтрующих устройств амплитудно-фазовых манипуляторов. Телекоммуникации, №8, 2004, с.29-32]. Качество двухполюсного управляемого элемента характеризует меру различия проводимости элемента в двух состояниях, определяемых двумя уровнями управляющего сигнала, с учетом проводимости или сопротивления источника сигнала.
- мнимая составляющая проводимости источника сигнала. Понятие "качество управляемого двухполюсного элемента", включенного в состав модулятора амплитуды и фазы с резистивным четырехполюсником, введено здесь впервые по аналогии с качеством управляемого двухполюсного элемента, включенного в состав манипулятора вместе с реактивным четырехполюсником [Kawakami S. Figure of Merit Associated with a Variable Parameter One-Port for RF Switching and Modulation // IEEE Trans: 1965. CT-12. №3. С.320-328; Головков А.А., Минаков В.Г. Взаимосвязи между элементами матрицы сопротивлений и их использование для синтеза согласующе-фильтрующих устройств амплитудно-фазовых манипуляторов. Телекоммуникации, №8, 2004, с.29-32]. Качество двухполюсного управляемого элемента характеризует меру различия проводимости элемента в двух состояниях, определяемых двумя уровнями управляющего сигнала, с учетом проводимости или сопротивления источника сигнала.
Подкоренное выражение в (10) всегда положительно.
Полученная система двух взаимосвязей (7) между элементами матрицы передачи резистивного четырехполюсника означает, что двухуровневые манипуляторы амплитуды и (или) фазы проходного сигнала должны содержать не менее чем два независимых резистивных элемента, значения параметров которых должны удовлетворять системе двух уравнений, сформированных на основе этих взаимосвязей. Для отыскания оптимальных значений параметров резистивного четырехполюсника необходимо выбрать какую-либо схему из М≥2 элементов, найти ее матрицу передачи, элементы которой выражены через параметры схемы резистивного четырехполюсника, и подставить их в (7). Сформированная таким образом система уравнений должна быть решена относительно выбранных двух параметров. Значения остальных М-2 параметров могут быть отнесены к сопротивлению zo или заданы произвольно. После использования описанного алгоритма будет реализована двухуровневая манипуляция амплитуды и фазы проходного сигнала с заданными отношениями модулей и разностями фаз коэффициентов передачи диодного манипулятора. Однако абсолютные значения модулей и фаз коэффициентов передачи при этом оказываются неконтролируемыми, т.е. их значения могут быть какими угодно. Для того чтобы обеспечить заданные значения модуля и фазы коэффициента передачи в одном из состояний диода, необходимо решить следующую задачу параметрического синтеза.
Пусть при тех же исходных данных, что и при решении первой задачи (1)-(3), требуется, чтобы в одном из состояний, например в первом, модуль и фаза коэффициента передачи принимали требуемые значения m1 и ϕ1 соответственно:

Подставим (5) в выражение (11) и разделив между собой действительную и мнимую части, получим систему двух уравнений:
После денормировки коэффициента передачи (5) путем умножения на  последнее выражение изменяется а1=rн; b1=xн.
последнее выражение изменяется а1=rн; b1=xн.
Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом  .
.
Решение системы (12) имеет вид взаимосвязей между элементами классической матрицы передачи четырехполюсника:

где  ;
;  ;
;  ;
;
 ;
;
 .
.
Поскольку элементы матрицы передачи четырехполюсника (7) и (13) описывают один и тот же четырехполюсник, то указанные выражения должны быть попарно равны. Из этих равенств вытекает, что все оставшиеся свободные в (7) и (13) элементы матрицы передачи должны определяться с помощью следующих выражений:


Анализ показывает, что элементы резистивного четырехполюсника должны определяться из решения системы четырех уравнений - (7) или (13) и (14). Таким образом, все четыре элемента матрицы передачи четырехполюсника оказываются строго заданными. Для того чтобы они определяли физически реализуемый четырехполюсник, должно выполняться свойство взаимности четырехполюсника [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с], которое в наших обозначениях имеет вид: а2(α-βγ)=1, из которого следуют ограничения на величину модуля коэффициента передачи в первом состоянии управляемого элемента:

Использованные условия описывают свойство взаимности. Поэтому достаточно выполнения любых трех из четырех уравнений. Четвертое уравнение оказывается зависимым от остальных.
Таким образом, количество резистивных двухполюсников, из которых формируется четырехполюсник, должно быть равным не менее трем. Значения параметров этих двухполюсников определяются путем решения указанных систем трех или четырех уравнений. При этих значениях параметров в первом состоянии будут реализованы заданные значения m и ϕ1, а также заданные отношения модулей m и разности фаз ϕ в двух состояниях, определяемых двумя крайними уровнями амплитуды низкочастотного управляющего сигнала.
В соответствии с указанным алгоритмом были синтезированы (определены выражения для оптимальных значений сопротивлений резистивных двухполюсников) простейшие схемы четырехполюсника из не менее чем трех резисторов. Матрицы передачи исследуемых четырехполюсников получены из работы [Гуревич И.В. Основы расчета радиотехнических цепей (линейные цепи при гармонических воздействиях). М.: Связь, 1975, 30-34 с.].
Для схемы в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (фиг.3):
 ;
;  ;
; 
Свободно выбираемое сопротивление r1 обеспечивает физическую реализуемость сопротивлений r2, r3, r4, т.е. их положительность.
Для схемы в виде двух каскадно-соединенных -образных соединений четырех резистивных двухполюсников (фиг.4):


Свободно выбираемое сопротивление r4 обеспечивает физическую реализуемость сопротивлений r1, r2, r3, т.е. их положительность.
Для схемы в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников (фиг.5):


Свободно выбираемые сопротивления r3, r5 обеспечивают физическую реализуемость сопротивлений r1, r2, r4, т.е. их положительность.
Для схемы в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников (фиг.6):
 ;
; 
 ; где
; где  .
.
Свободно выбираемое сопротивление r3 обеспечивает физическую реализуемость сопротивлений r1, r2, r4, т.е. их положительность.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестно устройство одновременной модуляции амплитуды и фазы, обеспечивающее заданные коэффициенты передачи и фазы в двух состояниях двухполюсного управляемого элемента в заданной полосе частот, состоящее из управляемого двухполюсного элемента, включенного в поперечную цепь (параллельно) между источником сигнала и входом резистивного четырехполюсника, причем четырехполюсник выполнен в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (в виде двух каскадно- соединенных -образных соединений четырех резистивных двухполюсников, в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников, в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников), параметры которых определены по соответствующим математическим выражениям. При этом разность фаз коэффициентов передачи выбрана оптимальной по критерию обеспечения физической реализуемости и наибольшей полосы частот. В обеих состояниях управляемого элемента значения модулей и фаз коэффициентов передачи контролируются.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника резистивным в виде четырех указанных выше схем с выбором значений их параметров из условия усиления и обеспечения двухуровневого изменения амплитуды и фазы проходного сигнала в заданной полосе частот при изменении состояния управляемого двухполюсного элемента, включенного между источником сигнала и входом резистивного четырехполюсника в поперечную цепь, при произвольных значениях сопротивлений источника сигнала и нагрузки) обеспечивает одновременно манипуляцию амплитуды и фазы и усиление амплитуды проходного сигнала при наибольшей полосе частот.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды и резисторы, сформированные в заявленную схему резистивного четырехполюсника в виде перечисленных схем соединения двухполюсников. Значения параметров резисторов однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении заданных значений модулей и фаз коэффициентов передачи в двух состояниях управляемого элемента, а также манипуляции амплитуды и фазы сигнала по заданному закону с наибольшей рабочей полосой частот.
Примечание: Авторы просят экспертизу при переписке в интересах идентификации заявки указывать структурную схему заявленного устройства, характеризуемого "местом включения двухполюсного управляемого элемента между источником сигнала и входом резистивного четырехполюсника в поперечную цепь (параллельно) с контролируемыми модулями и фазами коэффициентов передачи".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341006C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341007C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341008C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2342769C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341010C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341011C2 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341009C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2342768C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351060C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ АМПЛИТУДНО-МОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342771C2 |

Изобретение относится к радиосвязи и может быть использовано для формирования амплитудно-частотных и фазочастотных характеристик фазоманипулированных, амплитудно-манипулированных, а также амплитудно-фазоманипулированных сигналов в заданной полосе частот и преобразования частоты. Достигаемый технический результат - обеспечение манипуляции амплитуды и фазы проходного сигнала в широкой полосе частот при контролируемых модуле и фазе коэффициента передачи. Способ модуляции амплитуды и фазы радиочастотных сигналов состоит в том, что радиочастотный сигнал от источника сигнала подают на модулятор, выполненный из четырехполюсника, управляемого элемента, соединенного с источником двухуровневого низкочастотного управляющего сигнала, изменяют комплексное сопротивление управляемого элемента с одного значения на другое путем переключения низкочастотного управляющего сигнала из одного уровня на другой, к выходу четырехполюсника подключают нагрузку с комплексной проводимостью, все двухполюсники четырехполюсника выполняют резистивными. Устройство модуляции амплитуды и фазы радиочастотных сигналов содержит источник радиочастотных сигналов, двухполюсный управляемый элемент, четырехполюсник, выполненный из резистивных двухполюсников, нагрузку с комплексным сопротивлением, источник низкочастотного управляющего сигнала, при этом значения параметров резистивных элементов, формирующих резистивный четырехполюсник, выбраны в соответствии с заданным математическим выражением. 2 н. и 4 з.п. ф-лы, 6 ил.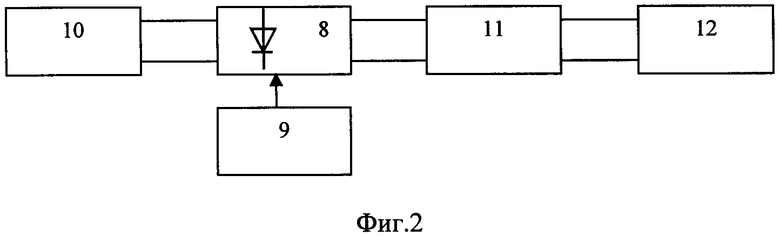

y1,2=g1,2+jb1,2 - заданные значения проводимостей управляемого двухполюсного элемента в двух состояниях (1 и 2), определяемых двумя крайними уровнями низкочастотного управляющего сигнала;
zн=rн+jxн, zo=ro+jxo - заданные комплексные сопротивления нагрузки и источника сигнала; Δϕ - заданная величина разностей фаз коэффициентов передачи, обеспечивающая физическую реализуемость и наибольшую полосу частот.

где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2;
значение сопротивления r1 выбирается из условия обеспечения физической реализуемости сопротивлений r2, r3, r4.

где α, β, γ, а и остальные обозначения имеют тот же смысл, что и в п.2;
значение сопротивления r4 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r3.

где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2;
значения сопротивлений r3 и r5 выбираются из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
| БАЛАКИРЕВ М.В., ВОХМЯКОВ Ю.С | |||
| и др | |||
| Радиопередающие устройства./ Под ред | |||
| О.А.Челнокова | |||
| - М.: Радио и связь, 1982, с.134-142, 143-148, 152-154 | |||
| Способ последовательного согласования импедансов в диапазоне дискретных частот | 1989 |
|
SU1778827A1 |
| Устройство для модуляции отраженного сигнала | 1990 |
|
SU1800579A1 |
| Теплоэнергетическая установка | 1985 |
|
SU1231237A1 |
| US 5155455 A, 13.10.1992. | |||

