Предлагаемое устройство относится к радиоизмерительной технике и может быть использовано для пассивного радиоконтроля при решении задач скрытого определения характеристик импульсных сигналов с повышенной помехоустойчивостью и скрытностью (кратковременные пакетные сигналы, сигналы со скачкообразным изменением частоты и другие импульсные сигналы).
Известны устройства для измерения частоты входного сигнала панорамного радиоприемника (авт. свид. СССР №№1.000.930, 1.272.266, 1.354.124, 1.406.506, 1.531.018, 1.557.532, 1.661.661, 1.742.741, 1.832.215; патенты РФ №№2.010.245, 2.025.737, 2.030.750, 2.279.097 и другие).
Из известных устройств наиболее близким к предлагаемому является «Устройство для измерения частоты входного сигнала панорамного радиоприемника» (патент РФ №2.279.097, G01R 23/10, 2004), которое и выбрано в качестве прототипа.
Следует отметить, что для представления любого сигнала достаточно знать его несущую частоту и двухкомпонентный векторный процесс - комплексную огибающую. Несмотря на то, что несущая частота может быть большой, комплексная огибающая остается относительно низкочастотным сигналом, который можно преобразовать в цифровую форму.
Любой сигнал в самой общей форме может быть представлен в следующем виде:

где  - комплексная огибающая сигнала;
- комплексная огибающая сигнала;
U(t) - огибающая (изменяющаяся во времени амплитуда) сигнала;
ϕ(t)=ϕн(t)+ϕo - фаза сигнала;
ϕн(t) - нелинейная составляющая фазы;
ϕ0 - начальная фаза;
ωct - линейная составляющая;
ωс - несущая круговая частота (ωс=2πfc).
С учетом формул Эйлера комплексная огибающая сигнала записывается в следующем виде:

При этом сигнал uc(t) выразим как вещественную часть комплексного сигнала 

Рассмотрим комплексную огибающую сигнала при определенных значениях фазы ϕ(t).
Если фаза сигнала ϕ(t), изменяясь в некоторые моменты времени, принимает значения либо 0, либо π, то

где знак плюс соответствует значению фазы ϕ1=0, а знак минус - значению фазы ϕ2=π.
Таким образом, в данном случае комплексная огибающая сигнала является действительной функцией времени, а исходный сигнал может быть записан в виде

откуда следует, что сигнал обладает амплитудной модуляцией (AM) и фазовой манипуляцией (ФМн). При этом амплитудная модуляция определяется огибающей сигнала U(t), а фазовая манипуляция - сомножителем cosϕ(t), принимающим значение ±1.
Если фаза сигнала ϕ(t) принимает значение ±π/2, то комплексная огибающая сигнала является мнимой функцией времени

Сигнал в этом случае описывается выражением

и тоже обладает амплитудной модуляцией и фазовой манипуляцией, определяемой сомножителем sinϕ(t)=±1.
В общем случае комплексная огибающая сигнала может быть представлена в виде суммы двух составляющих, т.е.

где индекс «в» означает действительную (вещественную) часть, а индекс «м» - мнимую.
Из последнего выражения следует, что

Таким образом, если комплексная огибающая  содержит действительную Uв(t) и мнимую Uм(t) составляющие, то фаза сигнала ϕ(t) является произвольной функцией времени и, следовательно, сигнал uc(t) обладает частотной (угловой) модуляцией.
содержит действительную Uв(t) и мнимую Uм(t) составляющие, то фаза сигнала ϕ(t) является произвольной функцией времени и, следовательно, сигнал uc(t) обладает частотной (угловой) модуляцией.
Известное устройство позволяет повысить точность измерения несущей частоты импульсных сигналов и исключает присущую супергетеродинным приемникам неоднозначность определения частоты за счет приема по дополнительным (зеркальному, комбинационным и интермодуляционным) каналам, а также обеспечивает возможность для визуального анализа комплексной огибающей импульсных сигналов.
Следует отметить, что для обеспечения надежной связи в условиях организованных и непреднамеренных помех, многолучевого распространения радиоволн, а также осуществления многостанционного доступа при работе в пакетных сетях радиосвязи, наилучшие результаты могут быть получены при использовании сигналов с псевдослучайной перестройкой рабочей частоты (ППРЧ).
Среди сигналов с частотной манипуляцией указанные сигналы обладают высокой помехоустойчивостью, энергетической, структурной, информационной, временной и пространственной скрытностью и нашли широкое применение в одноканальных системах радиосвязи с ППРЧ (фиг.5).
Технической задачей изобретения является расширение функциональных возможностей устройства путем определения, регистрации и анализа сетки используемых частот сигналов с псевдослучайной перестройкой рабочих частот.
Поставленная задача решается тем, что устройство для измерения частоты входного сигнала панорамного радиоприемника, содержащее в соответствии ближайшим аналогом последовательно включенные приемную антенну, входную цепь, усилитель высокой частоты, первый асинхронный детектор, второй вход которого соединен с выходом гетеродина, первый видеоусилитель, дифференцирующую цепь и вертикально-отклоняющие пластины первого осциллографического индикатора, горизонтально-отклоняющие пластины которого соединены с выходом блока формирования частотной развертки, последовательно подключенные к выходу гетеродина фазовращатель на 90°, второй асинхронный детектор, второй вход которого соединен с выходом усилителя высокой частоты, второй видеоусилитель и горизонтально-отклоняющие пластины второго осциллографического индикатора, последовательно подключенные к выходу дифференцирующей цепи формирователь импульса и первый ключ, второй вход которого соединен с выходом первого видеоусилителя, а выход подключен к вертикально-отклоняющим пластинам второго осциллографического индикатора, при этом управляющие входы входной цепи, усилителя высокой частоты, гетеродина и блока формирования частотной развертки соединен с соответствующими выходами блока управления, отличается от ближайшего аналога тем, что оно снабжено выключателем, вторым и третьим ключами, измерителем ширины полосы частот, измерителем временных интервалов, формирователем частотно-временной матрицы, блоком сравнения и блоком памяти и анализа, причем к выходу первого асинхронного детектора последовательно подключены выключатель, второй ключ, второй вход которого соединен с выходом формирователя импульса, измеритель ширины полосы частот, формирователь частотно-временной матрицы, второй вход которого через измеритель временных интервалов соединен с выходом второго ключа, блок сравнения, второй вход которого соединен с выходом блока памяти и анализа, и третий ключ, второй вход которого соединен с выходом формирователя частотно-временной матрицы, а выход подключен к входу блока памяти и анализа.
Структурная схема предлагаемого устройства представлена на фиг.1. Вид возможных осциллограмм показан на фиг.2 и 3. Временные диаграммы, поясняющие принцип работы устройства, изображены на фиг.4. Фрагмент частотно-временной матрицы сигнала одноканальной системы радиосвязи с псевдослучайной перестройкой рабочей частоты показан на фиг.5.
Устройство для измерения частоты входного сигнала панорамного радиоприемника содержит последовательно включенные приемную антенну 1, входную цепь 2, усилитель 4 высокой частоты, первый асинхронный детектор 6, второй вход которого выходом гетеродина 5, первый видеоусилитель 8, дифференцирующую цепь 9 и вертикально-отклоняющие пластины первого осциллографического индикатора 10, горизонтально-отклоняющие пластины которого соединены с выходом блока 7 формирования частотной развертки, последовательно подключенные к выходу гетеродина 5 фазовращатель 11 на 90°, второй асинхронный детектор 12, второй вход которого соединен с выходом усилителя 4 высокой частоты, второй видеоусилитель 13 и горизонтально-отклоняющие пластины второго осциллографического индикатора 16, последовательно подключенные к выходу дифференцирующей цепи 9 фазовращатель 14 импульса, первый ключ 15, второй вход которого соединен с выходом первого видеоусилителя 8, и вертикально-отклоняющие пластины второго осциллографического индикатора 16, последовательно подключенные к выходу первого асинхронного детектора 6 выключатель 17, второй ключ 18, второй вход которого соединен с выходом формирователя 14 импульса, измеритель 19 ширины полосы частот, формирователь 21 частотно-временной матрицы, второй вход которого через измеритель 20 временных интервалов соединен с выходом второго ключа 18, блок 22 сравнения, второй вход которого соединен с выходом блока 24 памяти и анализа, и третий ключ 23, второй вход которого соединен с выходом формирователя 21 частотно-временной матрицы, а выход подключен к входу блока 24 памяти и анализа. При этом управляющие входы входной цепи 2, усилитель 4 высокой частоты, гетеродина 5 и блока 7 формирования частотной развертки соединены с соответствующими выходами блока 3 управления.
Принцип работы предлагаемого устройства основан на использовании асинхронного метода приема и измерения несущей частоты импульсных сигналов при быстром поиске по частоте. При этом асинхронные детекторы 6 и 12 обеспечивают перенос огибающей несущей частоты на ноль с разложением на действительную (синфазную) и мнимую (квадратурную) составляющие соответственно.
Для визуального отображения комплексной огибающей предусматривается несколько различных форматов.
Синфазная и квадратурная компоненты на выходах асинхронных детекторов 6 и 12, представляющие соответственно действительную Uв(t) и мнимую Uм(t) части комплексной огибающей входного сигнала, могут визуально отображаться в виде осциллограмм в декартовых координат. Если осциллограмма - синхронизируется тактовой частотой принимаемого сигнала с дискретной манипуляцией, то визуальное отображение принимает вид так называемой «глазковой диаграммы».
Более информативным для сигналов с цифровой модуляцией оказывается векторный формат-представление комплексной огибающей в полярных координатах на комплексной плоскости. Модуль вектора отражает мгновенную амплитуду (огибающую) сигнала, а угол - текущее значение фазы. Анализ траекторий комплексного вектора при измерении времени позволяет распознать вид модуляции и оценить ее параметры.
Устройство работает следующим образом.
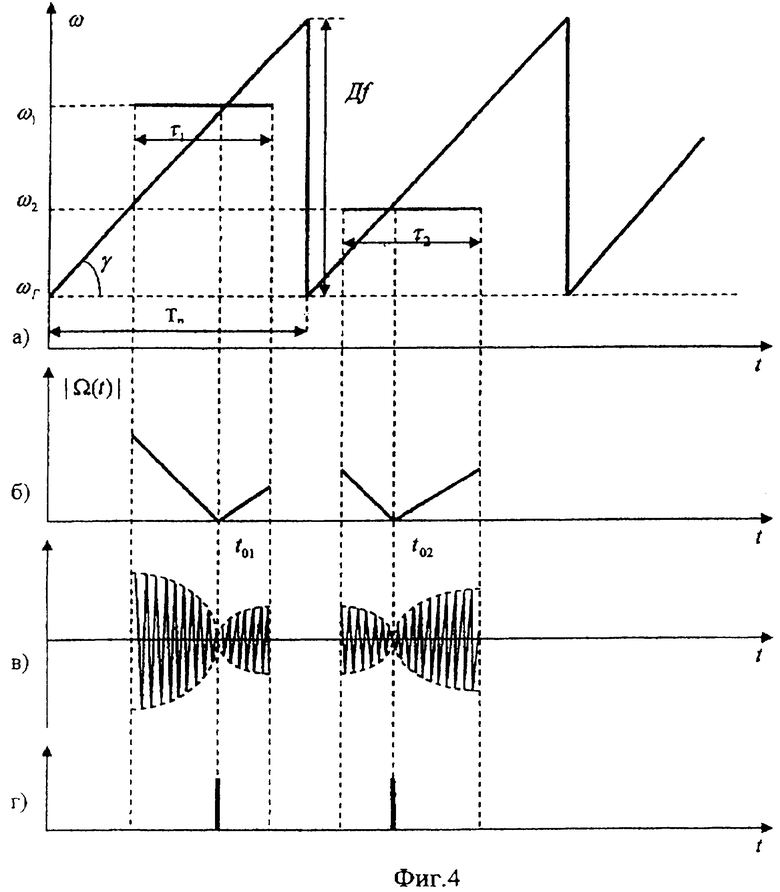
Поиск импульсных сигналов в заданном диапазоне частот Дf осуществляется с помощью блока 3 управления, который периодически с периодом Тп изменяют по линейному закону частоту гетеродина 5 (фиг.4,а)
uг(t)=Uгcos(ωгt+πγt2+ϕг), 0≤t≤Tп,
где Uг, ωг, ϕг, Tп - амплитуда, начальная частота, начальная фаза и период повторения частоты гетеродина;
 - скорость изменения частоты гетеродина (скорость перестройки).
- скорость изменения частоты гетеродина (скорость перестройки).
Принимаемый импульсный сигнал, например, на частоте ω1 (фиг.4,а)
u1(t)=U1cos(ω1t+ϕ1), 0≤t≤τ1,
где U1, ω1, ϕ1, τ1 - амплитуда, несущая частота, начальная фаза и длительность сигнала,
после прохождения приемной антенны 1, входной цепи 2 и усилителя 4 высокой частоты одновременно поступает на первые входы асинхронных детекторов 6 и 12, на вторые входы которых подается напряжение uг(t) гетеродина 5 непосредственно и через фазовращатель 11 на 90° соответственно.
Характер изменения частоты гетеродина 5 задается блоком 3 управления, который осуществляет одновременно перестройку входной цепи 2, усилителя 4 высокой частоты, гетеродина 5 и блока 7 формирования частотной развертки, при этом соблюдается условие Uг>>U1. Асинхронные детекторы 6 и 12 обеспечивают перенос огибающей несущей частоты на ноль с расположением на действительную Uв(t) и мнимую Uм(t) составляющие соответственно.
На выходах асинхронных детекторов образуется частотно-модулированные колебания с разностной частотой Ω(t) (фиг.4,б)

которые выделяются видеоусилителями 8 и 13 соответственно.
При расчете времени с момента, когда Ω(t) проходит через нулевое значение (ωиt+πγt2-ω1), колебания на выходе асинхронных детекторов 6 и 12 можно представить выражениями:
Uв(t)=Um(t)cos(ϕo-πγt2),
Uм(t)=Um(t)sin(ϕo-πγt2), 0≤t≤τ1,
где ϕ0 - случайная начальная фаза разностного колебания в момент времени t=0;
Um(t) - огибающая импульсного сигнала на выходе асинхронных детекторов 6 и 12.
Обозначая момент нулевых биений через t01, колебание на выходах асинхронных детекторов 6 и 12 можно представить в следующем виде:
Uв(t)=Um(t)cos[ϕ0-π(t-t01)2],
Uм(t)=Um(t)sin[ϕ0-π(t-t01)2], 0≤t≤τ1.
Указанные колебания при |πγ(t-t01)2|>>1 имеют форму, близкую к синусоидальной в пределах одного цикла, а при |πγ(t-t01)2|<1 форма колебаний сильно искажается, причем характер искажений определяется начальной фазой ϕ0.
Минимальное значение Ω(t) равно

Длительность этой области колебаний приблизительно равна 
Колебание Uв(t) с выхода видеоусилителя поступает на вход дифференцирующей цепи 9, на выходе которой образуется напряжение (фиг.4, в)
 , 0≤t≤τ1.
, 0≤t≤τ1.
Отсюда видно, что в момент нулевых биений после дифференцирующей цепи 9 напряжение равно нулю.
Обозначим ϕ(t)=ϕ0-πγ(t-t0)2, тогда

Используя эту особенность, можно определить более точно мгновенную частоту частотно-модулированного сигнала. Отчет указанной частоты осуществляется путем визуального наблюдения на экране осциллографического индикатора 10 с линейной разверткой напряжения U'(t) (фиг.2) и калиброванных меток времени. При этом погрешность в измерении частоты составляет (0,5-1%) от всего рабочего диапазона Дf.
В момент нулевых биений формирователем 14 формируется импульс (фиг.4, г), который поступает на управляющий вход ключа 15 и открывает его. В исходном состоянии ключ 15 всегда закрыт. При этом низкочастотные напряжения с выходов видеоусилителей 8 и 13 поступают на вертикально-отклоняющие и горизонтально-отклоняющие пластины осциллографического индикатора 16, формируя на его экране изображение, особенности которого путем визуального наблюдения используются для определения вида модуляции принимаемого сигнала.
Следует отметить, что задача определения вида модуляции принимаемого сигнала рассматривается как задача определения характера функций Um(t) и ϕ(t), которые в зависимости от способа кодирования передаваемой информации могут иметь как непрерывный, так и дискретный характер.
Возможный вид осциллограмм для сигналов с различными видами модуляции (манипуляции) показан на фиг.3.
Описанная выше работа устройства соответствует случаю приема импульсного сигнала на частоте ω1 (фиг.4, а).
Если импульсный сигнал принимается на частоте ω2, например, то работа устройства происходит аналогичным образом.
Если на вход устройства поступает сигнал с ППРЧ, то на экране осциллографического индикатора 16 образуется множество ярких точек (фиг.3, ЧМн), наблюдая которое оператор замыкает выключатель 17.
В момент нулевых биений формирователем 14 формируется импульс (фиг.4,г), который поступает на управляющий вход ключа 18 и открывает его. В исходном состоянии ключи 18 и 23 всегда закрыты.
При этом принимаемый сигнал с ППРЧ с выхода первого асинхронного детектора 6 через замкнутый выключатель 17 и открытый ключ 18 поступает на входы измерителей ширины полосы частот 19 и временных интервалов 20, где определяются ширина Δfc полосы частот каждого частотного канала и время tc работы на одной частоте соответственно. Измеренные значения поступают на входы формирования 21 частотно-временной матрицы (фиг.5).
Временной интервал между переключениями частот называется длительностью частотного элемента и характеризует собой время работы на одной частоте tc.
Для сравнения различных систем радиосвязи с ППРЧ в качестве одного из отличительных признаков используется скорость скачков частоты в единицу времени. По этому признаку различают системы радиосвязи с медленной, средней и быстрой скоростью перестройки частотных элементов.
Так как эта скорость не стандартизирована, то условно перестройка считается медленной при 100...300 скачках в секунду (ск/с), а при 1000 ск/с и более имеет место быстрая перестройка; скорость ППРЧ между этими двумя значениями считается средней. Хотя скорость ППРЧ и используется при сравнении систем радиосвязи, однако она имеет косвенное значение.
Самым важным параметром любой системы радиосвязи с ППРЧ с точки зрения помехоустойчивости является фактическое время работы на одной частоте tc. Этот параметр и характеризует способность систем радиосвязи с ППРЧ «уходить» от организованных помех.
На фиг.5 приведен фрагмент частотно-временной матрицы сигнала одноканальной системы радиосвязи с ППРЧ, где квадратами с наклонной штриховкой обозначены частотные каналы, занятые элементами сигнала. В такой системе радиосвязи в интервале между переключениями частот имеется только одна несущая частота и соответствующий канал передачи.
Измеренные значения ширины Δfc полосы каждого частотного канала и время tc работы в цифровом виде поступают в формирователь 21 частотно-временной матрицы, где в цифровом виде формируется частотно-временная матрица (фиг.5). Последняя поступает на первый вход блока 22 сравнения, на второй вход которого подаются коды измеренных ранее величин - Δfc и tc из блока 24 памяти. В исходном состоянии в блоке 24 памяти информация отсутствует.
Если сравниваемые коды указанных частотно-временных матриц не равны, то блок 22 сравнения формирует постоянное напряжение, которое поступает на управляющий вход ключа 23, открывая его. При этом код сформированной частотно-временной матрицы через открытый ключ 23 поступает в блок 24 памяти и анализа, где записывается в его памяти.
При повторном попадании сигнала с ППРЧ той же самой системы радиосвязи сравниваемые коды частотно-временных матриц будут равны и на выходе блока 22 сравнения напряжение отсутствует, ключ 23 оказывается закрытым.
Следовательно, повторной регистрации параметров сигнала с ППРЧ одной и той же системы радиосвязи не происходит.
Устройство позволяет повысить точность измерения несущей частоты импульсных сигналов, исключить присущую супергетеродинным панорамным радиоприемникам неоднозначность определения частоты за счет устранения приема по дополнительным (зеркальному, комбинационным и интермодуляционным) каналам и визуально определить вид модуляции (манипуляции) принимаемого импульсного сигнала. Это достигается тем, что спектр принимаемого импульсного сигнала высокой частоты переносится в область нулевой частоты с разложением огибающей на действительную и мнимую составляющие соответственно. Поэтому прием ложных сигналов (помех) по зеркальному, комбинационным и интермодуляционным каналам исключается.
Кроме того, устройство выполняет функцию векторного анализатора и в отличие от измерителей, которые оперируют со скалярными (одномерными) процессами, обрабатывает комплексные огибающие, представляющие амплитуду и фазу принимаемого импульсного сигнала. Это позволяет исследовать амплитудные и фазовые спектры, а также одновременно выделять амплитуду, фазу и частоту принимаемого импульсного сигнала и отображать их в виде спектральных, временных или векторных диаграмм.
Таким образом, предлагаемое устройство по сравнению с прототипом позволяет определять, регистрировать и анализировать сетку используемых частот принимаемого сигнала с псевдослучайной перестройкой рабочих частот. Указанные сигналы обладают высокой помехоустойчивостью, структурной, энергетической, информационной, временной, пространственной скрытностью и находят широкое практическое применение в системах радиосвязи с ППРЧ. Тем самым функциональные возможности устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННЫЙ ПАНОРАМНЫЙ РАДИОПРИЕМНИК | 2011 |
|
RU2521702C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2004 |
|
RU2279097C1 |
| ПАНОРАМНЫЙ АСИНХРОННЫЙ РАДИОПРИЕМНИК | 2008 |
|
RU2380717C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2016 |
|
RU2617112C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2008 |
|
RU2357363C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2004 |
|
RU2275744C1 |
| Устройство для измерения частоты входного сигнала панорамного радиоприемника | 1981 |
|
SU1000930A1 |
| СПОСОБ ПЕЛЕНГАЦИИ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2386977C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 1991 |
|
RU2025737C1 |
| Панорамный радиоприемник | 1987 |
|
SU1441327A1 |


Предложенное устройство относится к радиоизмерительной технике и может быть использовано для пассивного радиоконтроля при решении задач скрытого определения характеристик импульсных сигналов с повышенной помехоустойчивостью и скрытностью. Технической задачей изобретения является расширение функциональных возможностей устройства путем определения, регистрации и анализа сетки используемых частот сигналов с псевдослучайной перестройкой рабочих частот. Устройство для измерения частоты входного сигнала панорамного радиоприемника содержит приемную антенну, входную цепь, усилитель высокой частоты, первый и второй асинхронные детекторы, гетеродин, первый и второй видеоусилители, дифференцирующую цепь, первый и второй осциллографические индикаторы, имеющие вертикально-отклоняющие и горизонтально-отклоняющие пластины, блок формирования частотной развертки, фазовращатель на 90°, формирователь импульса и первый - третий ключи, блок управления, выключатель, измеритель ширины полосы частот, измеритель временных интервалов, формирователь частотно-временной матрицы, блок сравнения и блок памяти и анализа, соответствующим образом соединенные между собой. 5 ил.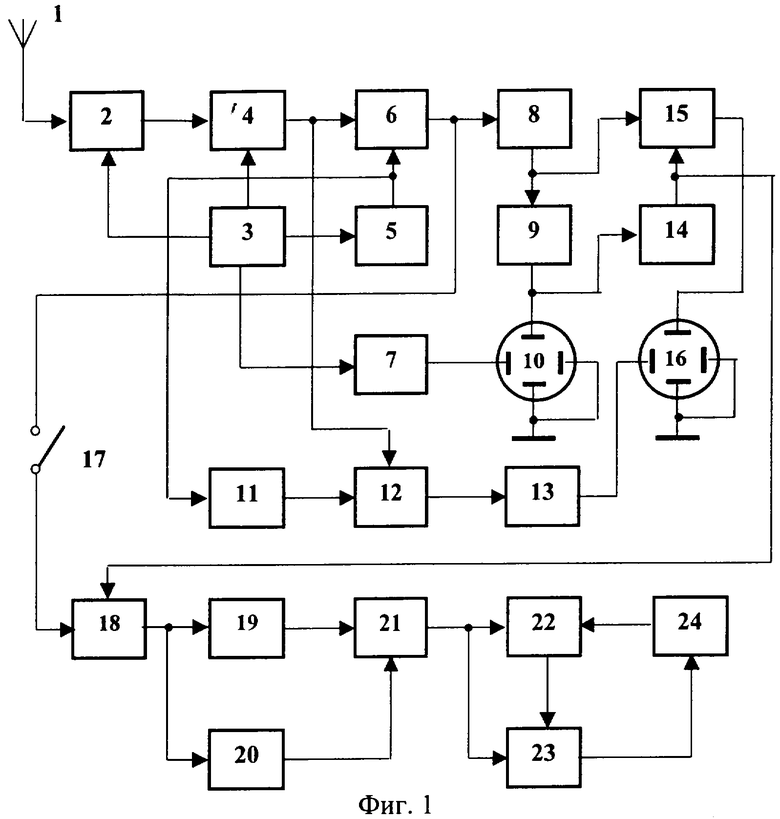
Устройство для измерения частоты входного сигнала панорамного радиоприемника, содержащее последовательно включенные приемную антенну, входную цепь, усилитель высокой частоты, первый асинхронный детектор, второй вход которого соединен с выходом гетеродина, первый видеоусилитель, дифференцирующую цепь и вертикально-отклоняющие пластины первого осциллографического индикатора, горизонтально-отклоняющие пластины которого соединены с выходом блока формирования частотной развертки, последовательно подключенные к выходу гетеродина фазовращатель на 90°, второй асинхронный детектор, второй вход которого соединен с выходом усилителя высокой частоты, второй видеоусилитель и горизонтально-отклоняющие пластины второго осциллографического индикатора, последовательно подключенные к выходу дифференцирующей цепи формирователь импульса и первый ключ, второй вход которого соединен с выходом первого видеоусилителя, а выход подключен к вертикально-отклоняющим пластинам второго осциллографического индикатора, при этом управляющие входы входной цепи, усилителя высокой частоты, гетеродина и блока формирования частотной развертки соединены с соответствующими выходами блока управления, отличающееся тем, что оно снабжено выключателем, вторым и третьим ключами, измерителем ширины полосы частот, измерителем временных интервалов, формирователем частотно-временной матрицы, блоком сравнения и блоком памяти и анализа, причем к выходу первого асинхронного детектора последовательно подключены выключатель, второй ключ, второй вход которого соединен с выходом формирователя импульса, измеритель ширины полосы частот, формирователь частотно-временной матрицы, второй вход которого через измеритель временных интервалов соединен с выходом второго ключа, блок сравнения, второй вход которого соединен с выходом блока памяти и анализа, и третий ключ, второй вход которого соединен с выходом формирователя частотно-временной матрицы, а выход подключен к входу блока памяти и анализа.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ | 2005 |
|
RU2280257C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР-ЧАСТОТОМЕР | 1993 |
|
RU2124216C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ | 2002 |
|
RU2230330C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ | 2005 |
|
RU2280257C1 |
| US 4443801 A, 17.04.1984. | |||

