Предлагаемые технические решения относятся к радиоэлектронике и могут быть использованы для определения местоположения и движения источников излучения сложных сигналов с псевдослучайной перестройкой рабочей частоты (ППРЧ).
Известны способы пеленгации и пеленгаторы для их осуществления (патенты РФ № 2003131, 2006872, 2010258, 2012010, 2134429, 2155352, 2175770, 2321015; Космические траекторные измерения. Под общей редакцией П.А.Агаджанова и др. М.: Сов. радио, 1969, с.244-245; Кинкулькин И.Е. и др. Фазовый метод определения координат. М.: Сов. радио, 1979; Космические радиотехнические комплексы. Под редакцией С.И.Бычкова. М.: Сов. радио, 1967, с.134-137, рис.2.3.9, б и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ пеленгации и пеленгатор для его осуществления» (патент РФ № 2321015, 2006, G01S 3/46), которые и выбраны в качестве базовых объектов.
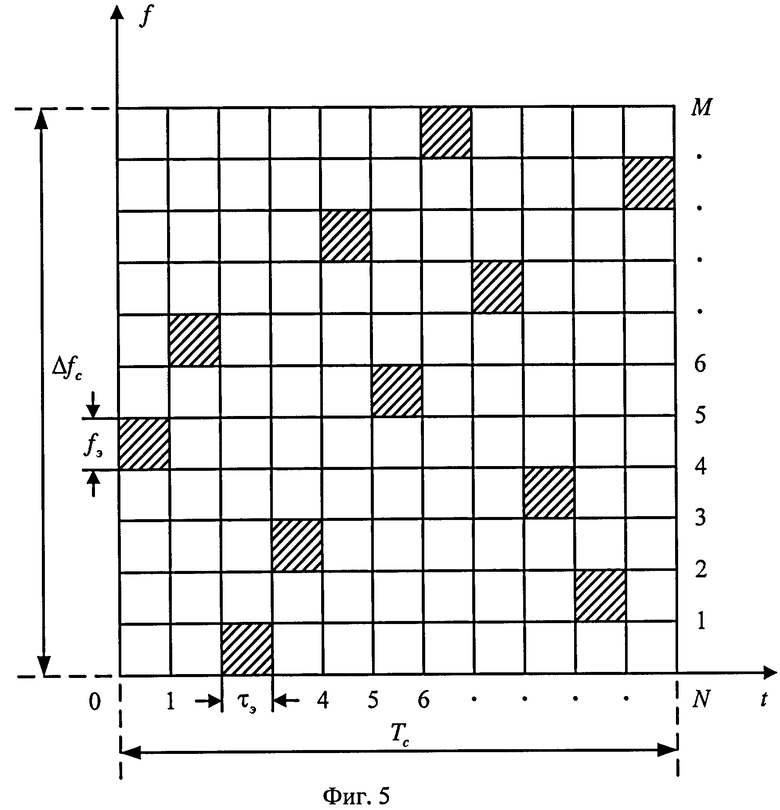
Известные технические решения обеспечивают определение местоположения источников излучения простых и сложных сигналов, но не позволяют определить местоположение источников излучения сложных сигналов с псевдослучайной перестройкой рабочей частоты (ППРЧ). Перестройка рабочей частоты (скачок) может происходить в такой полосе частот Δfс, которая включает в себя несколько частотных каналов. Каждый канал можно рассматривать как спектральную область с центральной частотой, значение которой является одной из возможных несущих частот в выделенном диапазоне. Каналы могут быть или смежными (соприкасающимися), или разнесенными друг от друга неиспользованными спектральными областями. На фиг.5 приведен фрагмент частотно-временной матрицы сложного сигнала с ППРЧ, где квадратами с наклонной штриховкой обозначены частотные каналы, занятые элементами сигнала. Временной интервал между переключениями частот называется длительностью частотного элемента (или периодом) и характеризует собой время работы на одной частоте τэ. Сигнал изменяет несущую частоту от одного скачка к другому, сохраняя в то же время непрерывность фазы. Частотная манипуляция без разрыва фазы позволяет сформировать сигналы со сравнительно узкой шириной спектра.
Технической задачей изобретения является расширение функциональных возможностей способа и устройства путем определения местоположения источника излучения сложных сигналов с псевдослучайной перестройкой рабочей частоты.
Поставленная задача решается тем, что способ пеленгации, основанный в соответствии с ближайшим аналогом на приеме сигналов на две антенны и их усилении, при этом одну из антенн вращают, диаграмму направленности вращающейся антенны выбирают в виде кардиоиды, вращают антенну с кардиоидной диаграммой направленности до совпадения направления нулевого приема с направлением на источник излучения полезных сигналов, делят продетектированное приемной аппаратурой с круговой диаграммой направленности напряжение на продетектированное приемной аппаратурой с кардиоидной диаграммой направленности напряжение, сравнивают напряжение, пропорциональное частному от деления, с пороговым напряжением, при превышении порогового напряжения, что соответствует совпадению направления нулевого приема с направлением на источник излучения полезных сигналов, формируют управляющий импульс, отличается от ближайшего аналога тем, что в качестве полезных сигналов используют сложные сигналы с псевдослучайной перестройкой рабочей частоты, для поиска и обнаружения которых осуществляют синхронную перестройку приемников, сформированным управляющим импульсом разрешают измерение частоты и длительности элементарных радиоимпульсов, формируют частотно-временную матрицу, определяющую внутреннюю структуру принимаемого сложного сигнала с псевдослучайной перестройкой рабочей частоты, сравнивают ее с априорно известной частотно-временной матрицей и при их равенстве прекращают вращение антенны с кардиоидной диаграммой направленности, синхронную перестройку приемников и фиксируют истинный пеленг на источник излучения полезных сигналов с псевдослучайной перестройкой рабочей частоты с априорно известной внутренней структурой.
Поставленная задача решается тем, что пеленгатор, содержащий в соответствии с ближайшим аналогом два приемника с антеннами, одна из которых выполнена вращающейся и связана через блок управления диаграммой направленности с мотором, последовательно подключенные к выходу вращающейся антенны блок управления диаграммой направленности, второй приемник, блок деления, второй вход которого через первый приемник соединен с выходом неподвижной антенны с круговой диаграммой направленности, пороговый блок, формирователь управляющего импульса, первый ключ, второй вход которого соединен с вторым выходом первого приемника, и измеритель частоты, последовательно включенные блок памяти и блок сравнения кодов, выход которого подключен к управляющему входу мотора, последовательно подключенные к второму выходу блока управления диаграммой направленности второй ключ, второй вход которого соединен с выходом блока сравнения кодов, и блок регистрации, отличается от ближайшего аналога тем, что он снабжен третьим ключом, измерителем временных интервалов и формирователем частотно-временной матрицы, причем каждый приемник выполнен в виде последовательно включенных усилителя высокой частоты, смесителя, второй вход которого через гетеродин соединен с выходом генератора пилообразного напряжения, полосового фильтра и амплитудного детектора, вход усилителя высокой частоты первого приемника соединен с выходом неподвижной антенны с круговой диаграммой направленности, вход усилителя высокой частоты второго приемника соединен с выходом блока управления диаграммой направленности, выходы амплитудных детекторов подключены к входам блока деления, вторым выходом первого приемника является выход полосового фильтра, который подключен к входу измерителя частоты, к выходу амплитудного детектора первого приемника последовательно подключены третий ключ, второй вход которого соединен с выходом формирователя управляющего импульса, измеритель временных интервалов и формирователь частотно-временной матрицы, второй вход которого соединен с выходом измерителя частоты, а выход подключен к второму входу блока сравнения кодов, управляющий вход генератора пилообразного напряжения соединен с выходом блока сравнения кодов.
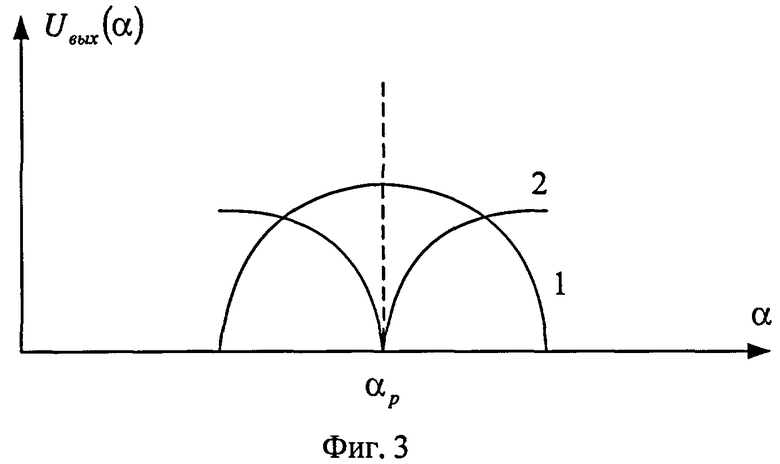
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1. Пеленгационные характеристики антенн и принцип определения местоположения источника излучения сложных сигналов с ППРЧ изображены на фиг.2-4. Фрагмент частотно-временной матрицы сложного сигнала с ППРЧ показан на фиг.5.
Устройство, реализующее предлагаемый способ, содержит последовательно включенные неподвижную антенну 1 с круговой диаграммой направленности, усилитель 4.1 высокой частоты, смеситель 4.2, второй вход которого через гетеродин 17 соединен с выходом генератора 16 пилообразного напряжения, полосовой фильтр 4.3, амплитудный детектор 4.4, блок 6 деления, пороговый блок 7, формирователь 8 управляющего импульса, первый ключ 9, второй вход которого соединен с выходом полосового фильтра 4.3, измеритель 10 частоты, формирователь 20 частотно-временной матрицы, блок 12 сравнения кодов, мотор 13, блок 3 управления диаграммой направленности, второй вход которого соединен с выходом вращающейся антенны 2 с кардиоидной диаграммой направленности, усилитель 5.1 высокой частоты, смеситель 5.2, второй вход которого соединен с выходом гетеродина 17, полосовой фильтр 5.3 и амплитудный детектор 5.4, выход которого соединен с вторым входом блока 6 деления. К выходу амплитудного детектора 4.4 последовательно подключены третий ключ 18, второй вход которого соединен с выходом формирователя 8 управляющего импульса, и измеритель 19 временных интервалов, выход которого соединен с вторым входом формирователя 20 частотно-временной матрицы. К второму выходу блока 3 управления диаграммой направленности последовательно подключены второй ключ 14, второй вход которого соединен с выходом блока 12 сравнения кодов, и блок 15 регистрации. Управляющий вход генератора пилообразного напряжения соединен с выходом блока 12 сравнения кодов.
Предлагаемый способ реализуется следующим образом.
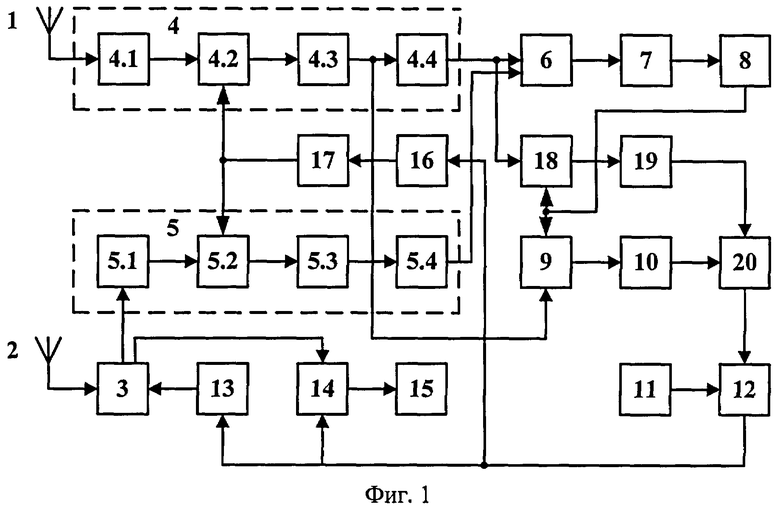
Приемная антенна 1 неподвижна и имеет круговую диаграмму направленности, приемная антенна 2 вращается, связана через блок 3 управления диаграммой направленности (редуктор) с мотором 13 и имеет кардиоидную диаграмму направленности, которая образуется с помощью рамки и вертикального вибратора (фиг.2).
Каждый приемник 4 (5) состоит из последовательно включенных усилителя 4.1 (5.1) высокой частоты, смесителя 4.2 (5.2), второй вход которого через гетеродин 17 соединен с выходом генератора 16 пилообразного напряжения, полосового фильтра 4.3 (5.3) и амплитудного детектора 4.4 (5.4).
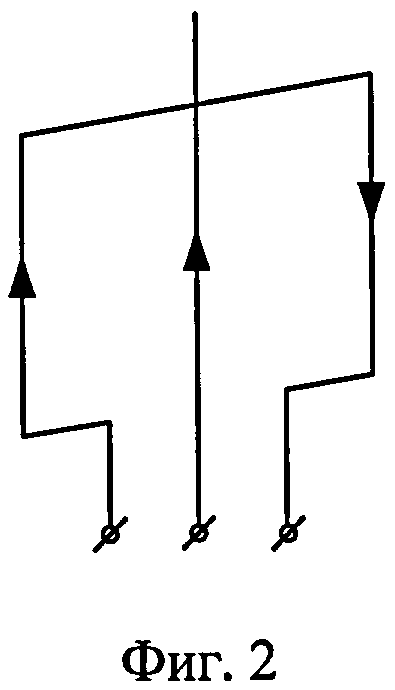
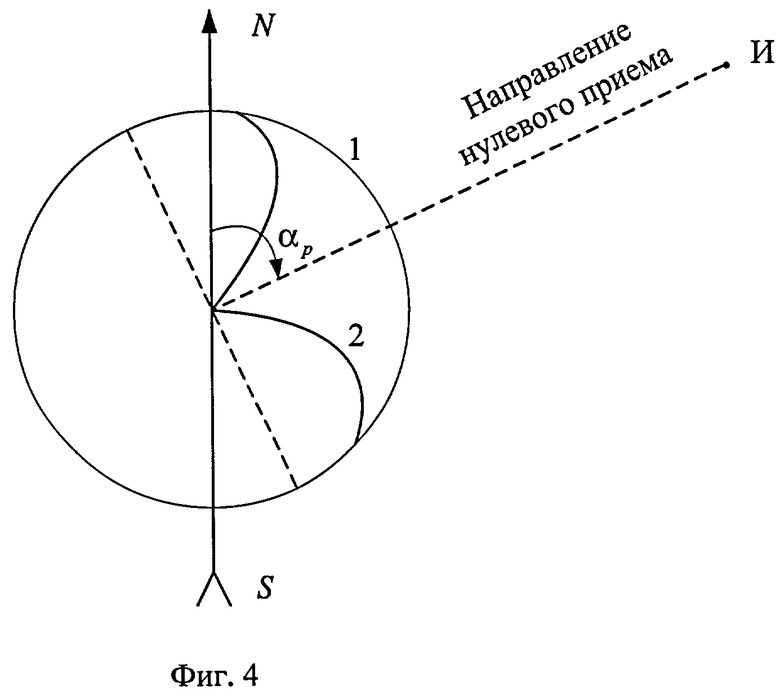
Амплитуда принимаемых сигналов на выходе приемника 4 не зависит от направления их прихода из-за круговой диаграммы направленности первой приемной антенны 1 (фиг.4). Амплитуда принимаемых сигналов на выходе приемника 5 зависит от направления их прихода из-за кардиоидной диаграммы направленности второй приемной антенны 2. Огибающие входных сигналов с выходов амплитудных детекторов 4.4 и 5.4 поступают на два входа блока 6 деления соответственно.
Для осуществления селекции полезных сигналов по направлению при помощи мотора 13 и блока 3 управления диаграммой направленности кардиоидную диаграмму направленности приемной антенны 2 вращают до совмещения нулевого провала с направлением прихода сигналов (фиг.4). Амплитуда сигналов с этого направления на выходе приемника 5 близка к нулю, поэтому на выходе блока 6 деления, осуществляющего деление амплитуды сигнала с выхода приемника 4 на амплитуду сигнала с выхода приемника 5, в этот момент времени напряжение будет максимальным.
Величину порога выбирают так, чтобы пороговый блок 7 сравнивал только от сигналов, приходящих с нулевого направления.
При срабатывании порогового блока 7 формирователь 8 вырабатывает управляющий импульс, который поступает на управляющие входы ключей 9 и 18, открывая их. В исходном состоянии ключи 9, 14 и 18 всегда закрыты.
Поиск сложных сигналов с ППРЧ в заданном диапазоне частот Δfс осуществляется с помощью генератора 16 пилообразного напряжения, который по пилообразному закону изменяет частоту гетеродина 17.
Высокочастотный сигнал промежуточной частоты со второго выхода первого приемника 4 (с выхода полосового фильтра 4.3) через открытый ключ 9 поступает на вход измерителя 10 частоты. Последний обеспечивает последовательное измерение в цифровой форме частоты fэ элементарных радиоимпульсов. Длительности τэ указанных радиоимпульсов с выхода амплитудного детектора 4.4 первого приемника 4 через открытый ключ 18 поступают на вход измерителя 19 временных интервалов. Коды измеренных частот и длительностей элементарных радиоимпульсов, порядок их следования поступают на входы формирователя 20 частотно-временной матрицы, где формируется частотно-временная матрица принимаемого сигнала с ППРЧ. Код указанной матрицы поступает на первый вход блока 12 сравнения кодов, на второй вход которого подается код априорно известной частотно-временной матрицы, предварительно записанный в блоке 11 памяти.
Если коды указанных частотно-временных матриц равны, то блок 12 сравнения кодов формирует управляющий импульс, который поступает на управляющий вход мотора 13, останавливая его, на управляющий вход генератора 16 пилообразного напряжения, останавливая его и прекращая синхронную перестройку приемников, и на управляющий вход ключа 14, открывая его.
При этом значение угловой координаты αp, определяющее направление на источник излучения полезных сигналов с ППРЧ (истинный пеленг), через открытый ключ 14 поступает на вход блока 15 регистрации, где и фиксируется.
Зависимость выходных напряжений Uвых(α) приемников 4 и 5 от направления прихода электромагнитных волн представляет собой пеленгационные характеристики (фиг.3).
Приемная антенна 2 обладает высокой пеленгационной чувствительностью, которая представляет собой крутизну пеленгационной характеристики в направлении нулевого приема
 ,
,
но низким отношением сигнал/шум.
Совместное использование двух антенн 1 и 2 с круговой и кардиоидной диаграммами направленности устраняют этот недостаток, сохраняя достоинство.
Таким образом, предлагаемые технические решения по сравнению с базовыми объектами обеспечивают повышение достоверности приема и пеленгации сложных сигналов с ППРЧ с априорно известной частотно-временной матрицей. Тем самым функциональные возможности способа пеленгации и пеленгатора для его осуществления расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2008 |
|
RU2357363C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2016 |
|
RU2617112C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1998 |
|
RU2161863C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2005 |
|
RU2292121C1 |
| ОБНАРУЖИТЕЛЬ РАДИОПЕРЕДАЧ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ (ВАРИАНТЫ) | 2005 |
|
RU2292643C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2002 |
|
RU2231926C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2004 |
|
RU2275744C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2007 |
|
RU2344430C1 |
| ПРИЕМОПЕРЕДАТЧИК | 1997 |
|
RU2122286C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА И ХАРАКТЕРНОГО РАЗМЕРА ТЕЧИ В ПОДЗЕМНОМ ТРУБОПРОВОДЕ | 2008 |
|
RU2374557C2 |
Предлагаемые технические решения относятся к радиоэлектронике и могут быть использованы для определения местоположения и движения источников излучения сложных сигналов с псевдослучайной перестройкой рабочей частоты (ППРЧ). Достигаемый технический результат изобретения - расширение функциональных возможностей путем определения местоположения источника излучения сложных сигналов с псевдослучайной перестройкой рабочей частоты. Пеленгатор, реализующий предлагаемый способ пеленгации, содержит неподвижную антенну с круговой диаграммой направленности, вращающуюся антенну с кардиоидной диаграммой направленности, блок управления диаграммой направленности, первый и второй приемники, два усилителя высокой частоты, два смесителя, два полосовых фильтра, два амплитудных детектора, блок деления, пороговый блок, формирователь управляющего импульса, три ключа, измеритель частоты, блок памяти, блок сравнения кодов, мотор, блок регистрации, генератор пилообразного напряжения, гетеродин, измеритель временных интервалов и формирователь частотно-временной матрицы, определенным образом соединенные между собой. 2 н.п. ф-лы, 5 ил.
1. Способ пеленгации, основанный на приеме сигналов на две антенны и их усилении, при этом одну из антенн вращают, диаграмму направленности вращающейся антенны выбирают в виде кардиоиды, вращают антенну с кардиоидной диаграммой направленности до совпадения направления нулевого приема с направлением на источник излучения полезных сигналов, делят продетектированное приемной аппаратурой с круговой диаграммой направленности напряжение на продетектированное приемной аппаратурой с кардиоидной диаграммой направленности напряжение, сравнивают напряжение, пропорциональное частному от деления, с пороговым напряжением, при превышении порогового напряжения, что соответствует совпадению направления нулевого приема с направлением на источник излучения полезных сигналов, формируют управляющий импульс, отличающийся тем, что в качестве полезных сигналов используют сложные сигналы с псевдослучайной перестройкой рабочей частоты, для поиска и обнаружения которых осуществляют синхронную перестройку приемников, сформированным управляющим импульсом разрешают измерение частоты и длительности элементарных радиоимпульсов, формируют частотно-временную матрицу, определяющую внутреннюю структуру принимаемого сложного сигнала с псевдослучайной перестройкой рабочей частоты, сравнивают ее с априорно известной частотно-временной матрицей и при их равенстве прекращают вращение антенны с кардиоидной диаграммой направленности, синхронную перестройку приемников и фиксируют истинный пеленг на источник излучения полезных сигналов с псевдослучайной перестройкой рабочей частоты с априорно известной внутренней структурой.
2. Пеленгатор, содержащий два приемника с антеннами, одна из которых выполнена вращающейся и связана через блок управления диаграммой направленности с мотором, последовательно подключенные к выходу вращающейся антенны блок управления диаграммой направленности, второй приемник, блок деления, второй вход которого через первый приемник соединен с выходом неподвижной антенны с круговой диаграммой направленности, пороговый блок, формирователь управляющего импульса, первый ключ, второй вход которого соединен с вторым выходом первого приемника, и измеритель частоты, последовательно включенные блок памяти и блок сравнения кодов, выход которого подключен к управляющему входу мотора, последовательно подключенные к второму выходу блока управления диаграммой направленности второй ключ, второй вход которого соединен с выходом блока сравнения кодов, и блок регистрации, отличающийся тем, что он снабжен третьим ключом, измерителем временных интервалов и формирователем частотно-временной матрицы, причем каждый приемник выполнен в виде последовательно включенных усилителя высокой частоты, смесителя, второй вход которого через гетеродин соединен с выходом генератора пилообразного напряжения, полосового фильтра и амплитудного детектора, вход усилителя высокой частоты первого приемника соединен с выходом неподвижной антенны с круговой диаграммой направленности, вход усилителя высокой частоты второго приемника соединен с выходом блока управления диаграммой направленности, выходы амплитудных детекторов подключены к входам блока деления, вторым выходом первого приемника является выход полосового фильтра, к выходу амплитудного детектора первого приемника последовательно подключены третий ключ, второй вход которого соединен с выходом формирователя управляющего импульса, измеритель временных интервалов и формирователь частотно-временной матрицы, второй вход которого соединен с выходом измерителя частоты, а выход подключен к второму входу блока сравнения кодов, управляющий вход генератора пилообразного напряжения соединен с выходом блока сравнения кодов.
| СПОСОБ ПЕЛЕНГАЦИИ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2321015C1 |
| RU 2004131191 A, 10.04.2006 | |||
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2007 |
|
RU2329602C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2004 |
|
RU2275744C1 |
| WO 2008105748 A1, 04.09.2008 | |||
| US 5477230 A, 19.12.1995 | |||
| US 4443801 A, 17.04.1984 | |||
| US 5323167 A, 21.06.1994. | |||

