Изобретение относится к кориолисову массовому расходомеру/плотномеру для протекающей в трубопроводе, в частности двух- или более фазной среды, а также к способу получения измеренного значения, представляющего массовый расход.
В технике измерения и автоматизации процессов для измерения физических параметров протекающей в трубопроводе текучей среды, например массового расхода, плотности и/или вязкости, часто используют такие измерительные приборы, которые посредством вставленного в направляющий текучую среду трубопровода, обтекаемого текучей средой измерительного преобразователя вибрационного типа и подключенной к нему измерительно-эксплуатационной схемы вызывают в текучей среде реакционные силы, например, связанные с массовым расходом кориолисовы силы, связанные с плотностью инерционные силы или связанные с вязкостью силы трения и т.д., и вырабатывают измерительный сигнал, представляющий соответственно массовый расход, вязкость и/или плотность текучей среды. Подобные измерительные преобразователи вибрационного типа описаны, например, в WO-A 03/076880, WO-A 02/37063, WO-A 01/33174, WO-A 00/57141, WO-A 99/39164, WO-A 98/07009, WO-A 95/16897, WO-A 88/03261, US 2003/0208325, US-B 6513393, US-B 6505519, US-A 6006609, US-A 5869770, US-A 5796011, US-A 5602346, US-A 5301557, US-A 5218873, US-A 5069074, US-A 4876898, US-A 4733569, US-A 4660421, US-A 4524610, US-A 4491025, US-A 4187721, EP-A 553939, EP-A 1001254 или ЕР-А 1281938.
Дл ведения текучей среды измерительные преобразователи включают в себя, по меньшей мере, одну, закрепленную в несущей раме, например трубчатой или коробчатой, измерительную трубку с согнутым или прямым сегментом, который для вырабатывания названных выше реакционных сил заставляют при работе вибрировать с приводом от электромеханического устройства возбуждения. Для регистрации вибраций сегмента трубки, в частности со стороны входа и выхода, измерительные преобразователи содержат далее реагирующую на движения сегмента трубки физико-электрическое сенсорное устройство. У кориолисовых массовых расходомеров для протекающей в трубопроводе среды измерение массового расхода основано на том, что среду заставляют течь через помещенную в трубопровод и вибрирующую при работе измерительную трубку, в результате чего среда испытывает кориолисовы силы. Они, в свою очередь, вызывают то, что входные и выходные участки измерительной трубки колеблются со сдвигами по фазе по отношению друг к другу. Величина этих фазовых сдвигов служит мерой массового расхода. Колебания измерительной трубки регистрируют поэтому посредством двух отстоящих друг от друга вдоль измерительной трубки датчиков колебаний упомянутого сенсорного устройства и преобразуют в измерительные сигналы колебаний, по взаимному фазовому сдвигу которых определяют массовый расход.
В приведенном выше источнике US-A 4187721 сказано, что кориолисовыми массовыми расходомерами обычно можно измерять также плотность протекающей среды в данный момент, а именно с помощью частоты, по меньшей мере, одного из вырабатываемых сенсорным устройством измерительных сигналов колебаний. Кроме того, в большинстве случае подходящим образом непосредственно измеряют также температуру измеряемой текучей среды, например, посредством установленного на измерительной трубке датчика температуры. Поэтому вполне можно предположить, что - даже если это категорически не указано - посредством современных кориолисовых массовых расходомеров в любом случае можно измерять также плотность и температуру среды, тем более что они при измерении массового расхода так и так всегда используются для компенсации ошибок измерения вследствие колебаний плоскости среды, см., в частности, уже упомянутые публикации WO-A 02/37063, WO-A 99/39164, US-A 5602346 или WO-A 00/36379.
При применении измерительных преобразователей описанного рода оказалось, однако, что у неоднородных сред, в частности двух- или многофазных текучих сред, полученные из колебаний измерительной трубки измерительные сигналы колебаний, в частности также упомянутый фазовый сдвиг, несмотря на вязкость и плотность отдельных фаз, а также массовый расход практически поддерживаются постоянными и/или соответственно также учитываются, в значительной степени подвержены колебаниям и, таким образом, могут стать совершенно непригодными для измерения, при необходимости, соответствующего физического параметра без вспомогательных мер. Такими неоднородными средами могут быть, например, жидкости, в которые, как это практически неизбежно во время процессов дозирования или розлива, вводят имеющийся в трубопроводе газ, в частности воздух, или из которых выгазовывают растворенную текучую среду, например диоксид углерода, что приводит к ценообразованию. В качестве другого примера таких неоднородных сред следует назвать далее влажный или насыщенный пар.
Уже в US-A 4524610 указана возможная причина этой проблемы при эксплуатации измерительных преобразователей вибрационного типа, а именно то обстоятельство, что введенные текучей средой в измерительную трубку неоднородности, например, газовые пузырьки, осаждаются на ее внутренней стенке и могут, таким образом, оказывать значительное влияние на вибрационную характеристику. Для решения проблемы далее предложено встроить измерительный преобразователь так, чтобы прямая измерительная трубка проходила, в основном, вертикально, что, тем самым, препятствует осаждению таких мешающих, в частности газообразных, неоднородностей. При этом речь идет, однако, об очень специальном и, в частности, в технике измерения промышленных процессов лишь весьма условно реализуемом решении. Во-первых, в этом случае трубопровод, в который должен быть встроен измерительный преобразователь, пришлось бы, при необходимости, согласовывать с ним, а не наоборот. Во-вторых, у измерительных трубок, как уже сказано, речь может идти о трубках криволинейной формы, так что проблема также не может быть решена путем согласовывания положения монтажа. Кроме того, оказалось, что названные искажения измерительного сигнала нельзя существенно уменьшить даже при использовании вертикально встроенной прямой измерительной трубки. Кроме того, колебания выработанного, таким образом, измерительного сигнала при протекающей среде также нельзя предотвратить.
Аналогичные причины, а также их влияние на точность измерения при определении массового расхода обсуждались, например, в JP-A 10-281846, WO-A 03/076880 или US-B 6505519. В то время как для уменьшения связанных с двух- или более фазными текучими средами ошибок измерения в WO-A 03/076880 предложено предшествующее собственно измерению расхода кондиционирование течения или текучей среды, в JP-A 10-281846 и US-B 6505519 предпочтение отдано коррекции основанного на измерительных сигналах колебаний измерения расхода, в частности измерения массового расхода, например с использованием предварительно обученных, при необходимости также адаптивных классификаторов для измерительных сигналов колебаний. Классификаторы могут быть выполнены, например, в виде карт Кохонена или нейронной сети и осуществлять коррекцию либо с помощью немногих измеренных при эксплуатации параметров, в частности массового расхода и плотности, а также других выведенных из этого признаков, так и с использованием включающего в себя один или несколько периодов колебаний интервала измерительных сигналов колебаний.
Использование такого классификатора дает, например, то преимущество, что по сравнению с традиционными кориолисовыми массовыми расходомерами/плотномерами на измерительном преобразователе не приходится предпринимать никаких изменений или приходится предпринимать лишь весьма незначительные изменения, будь то в механической конструкции, устройстве возбуждения или управляющей им рабочей схеме, особенно приспособленных к специальному применению.
Существенный недостаток таких классификаторов состоит, однако, в том числе, в том, что по сравнению с традиционными кориолисовыми массовыми расходомерами необходимы значительные изменения в области получения данных измерений, прежде всего в отношении используемых аналого-цифровых преобразователей и микропроцессоров. Как описано в US-A 6505519, для подобной обработки сигналов, например при оцифровывании измерительных сигналов колебаний, которые могут иметь частоту колебаний около 80 Гц, для достижения достаточной точности требуется частота дискретизации около 55 кГц или более. Иначе говоря, измерительные сигналы колебаний следует дискретизировать с соотношением частот дискретизации гораздо более 600:1. Кроме того, соответственно полностью выпадает также хранящееся в цифровой измерительной схеме и выполненное встроенное программное обеспечение.
Другой недостаток таких классификаторов следует усматривать также в том, что они обучены на фактически царящие при работе измерительного преобразователя условия измерения, будь то ситуация при монтаже, измеряемая текучая среда и ее в большинстве случаев изменяющиеся свойства или другие влияющие на точность измерения факторы, и должны быть соответственно аттестованы. На основе высокой комплексности взаимодействия всех этих факторов обучение и его аттестация могут осуществляться в большинстве случаев только на месте и для каждого измерительного преобразователя индивидуально, что имеет следствием также значительные затраты при пуске измерительного преобразователя в эксплуатацию. В остальном оказалось, что подобные алгоритмы классификации, с одной стороны, из-за высокой комплексности, а, с другой стороны, вследствие того, что в большинстве случаев соответствующая физико-математическая модель с технически важными или не вызывающими возражений параметрами присутствует неявно, классификаторы имеют очень малую прозрачность и, тем самым, нередко являются труднореализуемыми. Будучи связаны с этим, вполне могут возникнуть предубеждения у потребителя, причем такие проблемы с одобрением со стороны потребителя могут возникнуть, в частности, тогда, когда используемый классификатор представляет собой к тому же самоадаптирующуюся, например нейронную, сеть.
Одна задача изобретения состоит поэтому в создании соответствующего кориолисова массового расходомера, который обеспечивает точное измерение массового расхода даже при неоднородных, в частности многофазных, текучих средах. Другая задача состоит в создании соответствующего способа получения результата измерения.
Эта задача решается согласно изобретению, посредством кориолисова массового расходомера, в частности кориолисова массового расходомера/плотномера, для измерения массового расхода протекающей в трубопроводе, в частности двух- или более фазной среды, содержащего:
- по меньшей мере, одну вставленную в трубопровод измерительную трубку, обтекаемую при работе средой;
- несущее средство, фиксированное на входном и выходном концах измерительной трубки и зажимающее ее, тем самым, с возможностью ее вибрации;
- устройство возбуждения, приводящее измерительную трубку при работе в механические колебания, в частности изгибные колебания;
- датчики колебаний для вырабатывания первого измерительного сигнала колебаний, представляющего колебания на входе измерительной трубки, и второго измерительного сигнала колебаний, представляющего колебания на выходе измерительной трубки;
- обрабатывающую электронную схему, которая вырабатывает выведенное из измерительных сигналов колебаний, предварительно представляющее измеряемый массовый расход первое промежуточное значение и выведенное из первого промежуточного значения корректировочное значение для первого промежуточного значения и которая посредством первого промежуточного значения и корректировочного значения вычисляет измеренное значение массового расхода, представляющее измеряемый массовый расход,
- причем обрабатывающая электронная схема вырабатывает корректировочное значение с использованием выведенного из первого промежуточного значения второго промежуточного значения, представляющего функциональное значение степенной функции с промежуточным значением в качестве основания и, в частности, рациональным показателем, который меньше нуля.
Далее задача решается согласно изобретению посредством способа получения первого измеренного значения, представляющего массовый расход протекающей в трубопроводе среды, с помощью кориолисова массового расходомера, в частности кориолисова массового расходомера/плотномера, каковой способ включает в себя следующие этапы:
- возбуждение колебаний, в частности изгибных колебаний, обтекаемой средой измерительной трубки кориолисова массового расходомера для создания кориолисовых сил;
- регистрацию колебаний измерительной трубки и вырабатывание представляющего колебания на входе первого измерительного сигнала и представляющего колебания на выходе второго измерительного сигнала для получения предварительно представляющего массовый расход промежуточного значения и для получения корректировочного значения для промежуточного значения,
- причем для получения корректировочного значения из первого промежуточного значения выводят второе промежуточное значение, представляющее функциональное значение степенной функции с промежуточным значением в качестве основания и, в частности, рациональным показателем, который меньше нуля;
- коррекцию промежуточного значения посредством корректировочного значения.
В соответствии с первым выполнением кориолисова массового расходомера, согласно изобретению обрабатывающая электронная схема вырабатывает измеренное значение плотности, выведенное из первого и/или второго измерительного сигнала колебаний, представляющего плотность среды, и определяет корректировочное значение также посредством измеренного значения плотности.
В соответствии со вторым выполнением кориолисова массового расходомера согласно изобретению обрабатывающая электронная схема посредством измеренного значения плотности определяет отклонение плотности среды от заданной эталонной плотности.
В соответствии с третьим выполнением кориолисова массового расходомера согласно изобретению обрабатывающая электронная схема содержит табличную память, в которой хранятся зависимые от второго промежуточного значения, оцифрованные корректировочные значения, причем табличная память выдает корректировочное значение посредством образованного на основе второго промежуточного значения цифрового адреса доступа к памяти.
В соответствии с первым вариантом способа согласно изобретению он включает в себя следующие этапы:
- получение представляющего плотность среды второго измеренного значения с помощью измерительных сигналов;
- получение корректировочного значения с использованием второго измеренного значения.
Преимущество изобретения состоит в том, что у кориолисова массового расходомера по сравнению с традиционным кориолисовым массовым расходомером лишь в обычно цифровую обрабатывающую электронную схему приходится вносить незначительные, ограниченные, в основном, встроенным программным обеспечением изменения, тогда как ни у измерительного преобразователя, ни при вырабатывании и предварительной обработке измерительных сигналов колебаний изменений не требуется или требуются, скорее, лишь незначительные изменения. Так, например, также измерительные сигналы колебаний могут быть по-прежнему дискретизированы с обычным соотношением частот дискретизации гораздо менее 100:1, в частности около 10:1.
Изобретение и другие предпочтительные выполнения более подробно поясняются на примерах его осуществления, изображенных на чертеже. Одинаковые детали обозначены на всех фигурах одинаковыми ссылочными позициями; для наглядности уже упомянутые ссылочные позиции на последующих фигурах опущены. На чертеже представляют:
- фиг.1: в перспективе при виде сбоку кориолисов массовый расходомер, служащий для вырабатывания измеренного значения массового расхода;
- фиг.2: блок-схему предпочтительного выполнения электронного блока, подходящего для кориолисова массового расходомера из фиг.1;
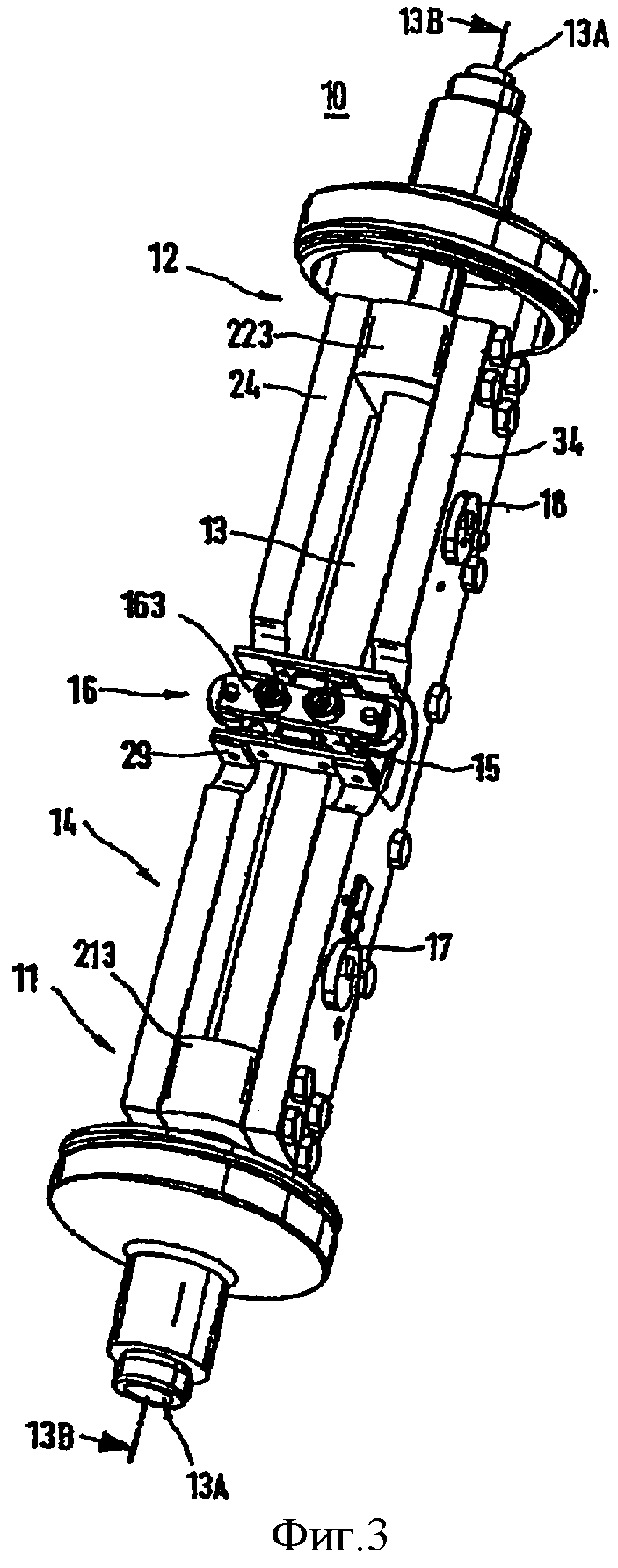
- фиг.3: частично в разрезе, в перспективе и при первом виде сбоку пример выполнения подходящего для кориолисова массового расходомера из фиг.1 измерительного преобразователя вибрационного типа;
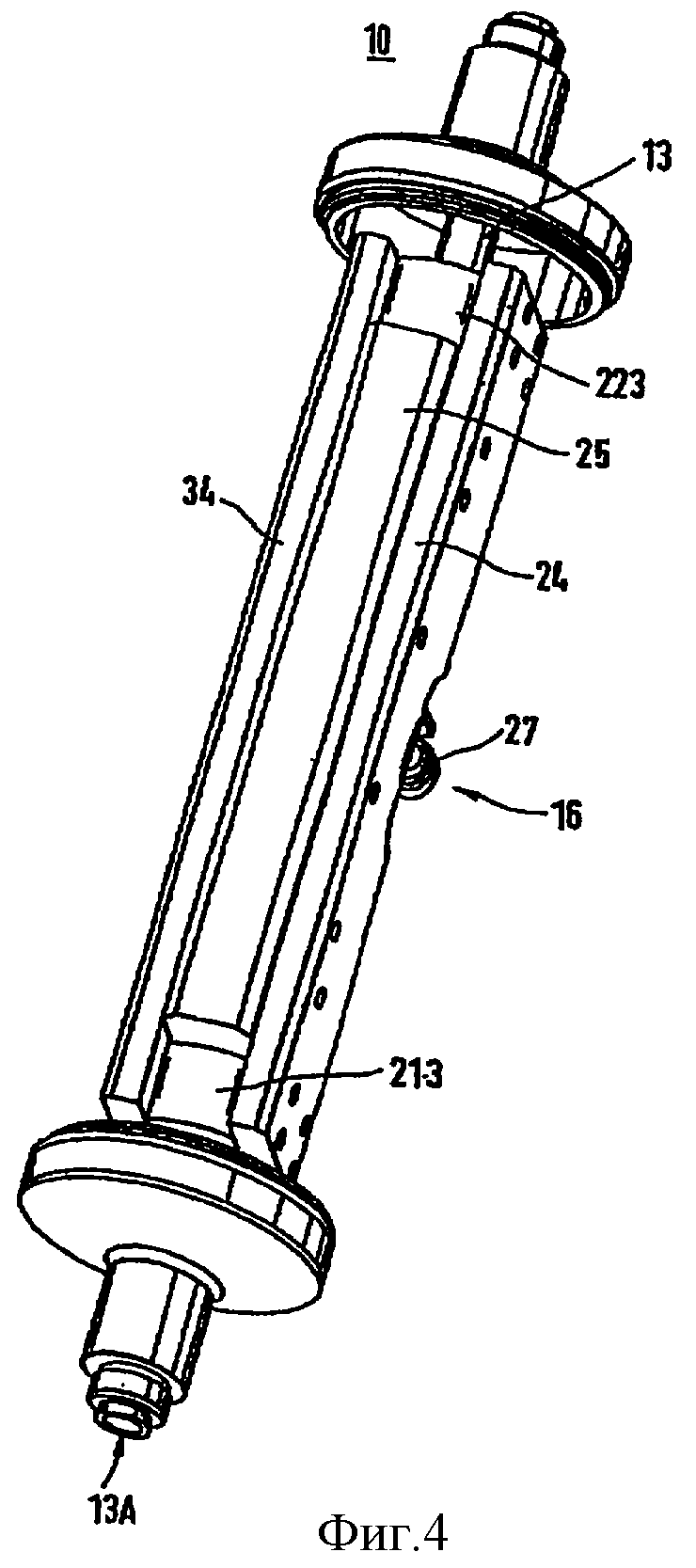
- фиг.4: в перспективе при втором виде сбоку измерительный преобразователь из фиг.3;
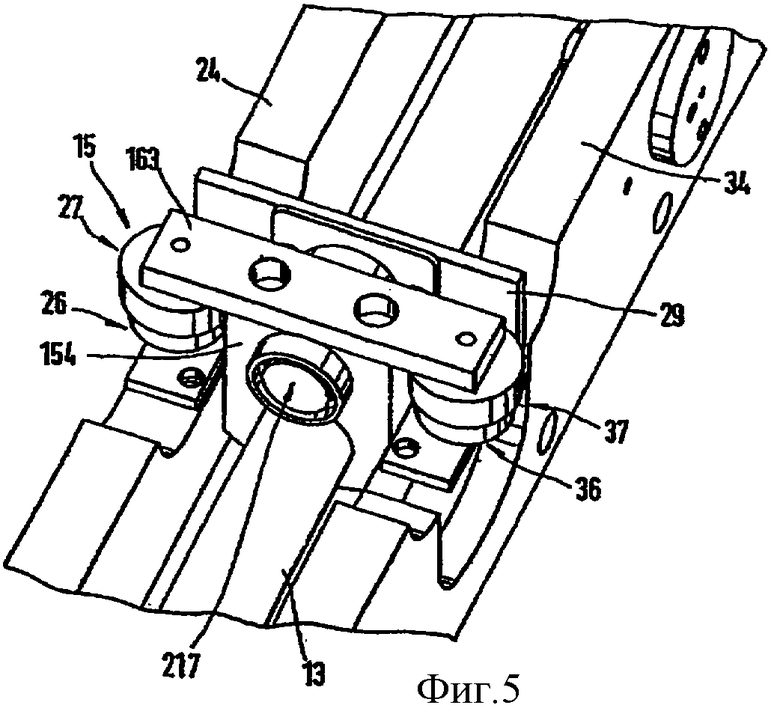
- фиг.5: пример выполнения электромеханического устройства возбуждения для измерительного преобразователя из фиг.3.
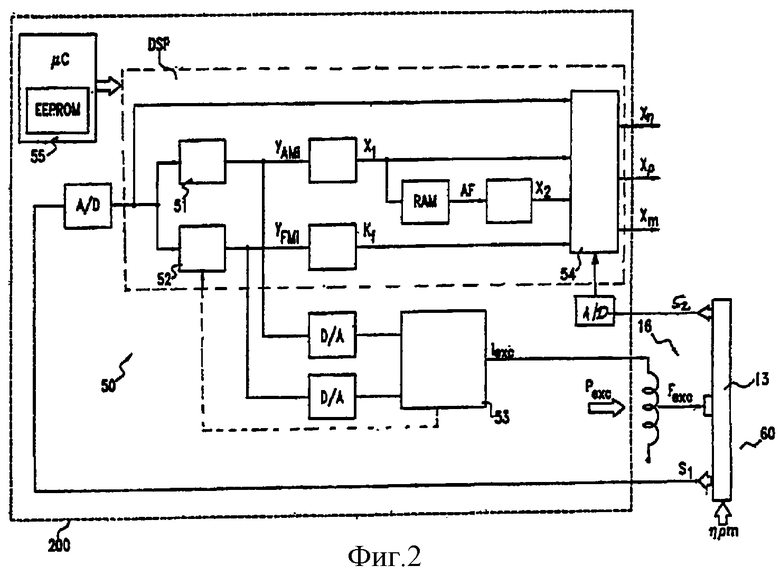
На фиг.1 в перспективе изображен кориолисов массовый расходомер 1, служащий для измерения массового расхода m протекающей в трубопроводе среды и преобразования в представляющее в данный момент этот массовый расход измеренное значение Хm массового расхода; трубопровод для наглядности не показан. Средой может быть практически любое способное к течению вещество, например жидкости, газы или пары. Кориолисов массовый расходомер 1 содержит для этого измерительный преобразователь 10 вибрационного типа и как показано на фиг.2 электрически соединенный с измерительным преобразователем 10 электронный блок 50. Для размещения электронного блока 50 предусмотрен установленный снаружи на измерительном преобразователе 10 корпус 200.
Для измерения массового расхода m в протекающей среде посредством измерительного преобразователя 10, возбужденного к вибрациям при работе электронным блоком 50, создают кориолисовы силы, зависимые от массового расхода m и действующие на измерительный преобразователь 10 с возможностью измерения, т.е. регистрации датчиком и электронной обработки. Помимо вырабатывания измеренного значения Хm массового расхода кориолисов массовый расходомер служит также для измерения плотности ρ протекающей среды и определения представляющего в данный момент плотность ρ измеренного значения Хρ плотности.
Преимущественно электронный блок 50 выполнен с возможностью обмена при работе кориолисова массового расходомера 1 через систему передачи данных, например систему полевых шин, данными измерений и/или другими эксплуатационными данными со стоящим над ней блоком обработки данных измерений, например системой управления с программируемой памятью, персональным компьютером и/или рабочей станцией. Кроме того, электронный блок 50 выполнен с возможностью питания от внешнего источника энергоснабжения, например, также через упомянутую систему полевых шин. В случае, если вибрационный измерительный прибор предусмотрен для связи с полевой шиной, электронный блок 50, в частности программируемый, содержит соответствующий интерфейс связи для обмена данными, например для передачи данных измерений вышестоящей системе управления с программируемой памятью или вышестоящей системе управления процессом.
На фиг.3 и 4 изображен пример выполнения служащего в качестве измерительного преобразователя 10 физико-электрического преобразовательного устройства вибрационного типа. Конструкция и принцип действия подобного преобразовательного устройства известны специалисту и подробно описаны, например, в US-A 6006609.
Для ведения измеряемой текучей среды измерительный преобразователь 10 содержит, по меньшей мере, одну, имеющую входной 11 и выходной 12 концы измерительную трубку 13 заданной, упруго деформируемой при работе ширины 13А в свету и заданного условного прохода. Упругая деформация ширины 13А в свету означает здесь, что для создания присущих текучей среде и, тем самым, описывающих текучую среду кориолисовых сил пространственную форму и/или пространственное положение ширины 13А в свету циклически, в частности периодически, изменяют в пределах диапазона упругости измерительной трубки 13 заданным образом (см., например, US-A 4801897, US-A 5648616, US-A 5796011 и/или US-A 6006609). Здесь следует настоятельно указать на то, что, хотя измерительный преобразователь в данном примере выполнения содержит лишь одну прямую измерительную трубку, для реализации изобретения вместо такого измерительного преобразователя вибрационного типа может использоваться практически любой из описанных в уровне техники кориолисовых массовых расходомеров, в частности изгибно-колебательного типа с исключительно или, по меньшей мере, частично вибрирующей в режиме изгибных колебаний, изогнутой или прямой измерительной трубкой. В частности, пригодны, например, измерительные преобразователи вибрационного типа с двумя обтекаемыми измеряемой средой, изогнутыми измерительными трубками, как они подробно описаны, например, в ЕР-А 1154243, US-A 5301557, US-A 5796011, US-A 6505519 или WO-А 02/37063. Другие подходящие варианты выполнения таких служащих в качестве измерительного преобразователя 10 преобразовательных устройств описаны, например, в WO-A 02/099363, WO-A 02/086426, WO-A 95/16897, US-A 5602345, US-A 5557973 или US-A 5357811. В качестве материала используемой измерительной трубки 13 особенно подходят, например, титановые сплавы. Вместо титановых сплавов могут применяться также другие, обычно применяемые для подобных, в частности также изогнутых, измерительных трубок материалы, например нержавеющая сталь, тантал или цирконий и т.д.
Измерительная трубка 13, сообщающаяся обычным образом с входной и выходной сторон с подводящим и отводящим текучую среду трубопроводом, зажата с возможностью колебания в жесткой, в частности изгибно- и крутильно-жесткой несущей раме 14. Вместо изображенной здесь коробчатой несущей рамы 14 могут использоваться, само собой, также другие подходящие несущие средства, например проходящие параллельно или коаксиально измерительной трубке трубы.
Несущая рама 14 фиксирована на измерительной трубке 13 с входной стороны посредством входной пластины 213, а с выходной стороны - посредством выходной пластины 223, причем через обе последние проходят соответствующие продолжения измерительной трубки 13. Далее несущая рама 14 содержит первую 24 и вторую 34 боковые пластины, фиксированные на входной 213 и выходной 23 пластинах таким образом, что они проходят практически параллельно измерительной трубке 13 на расстоянии от нее и друг от друга (фиг.3). Таким образом, обращенные друг к другу боковые поверхности обеих боковых пластин 24, 34 также параллельны друг другу. На боковых пластинах 24, 34 на расстоянии от измерительной трубки 13 фиксирован продольный стержень 25, служащий в качестве гасящей колебания измерительной трубки 13 балансировочной массы. Продольный стержень 25 проходит, как показано на фиг.4, практически параллельно всей колеблющейся длине измерительной трубки 13; это, однако, не является обязательным, продольный стержень 25 может быть выполнен, само собой, если требуется, также более коротким. Несущая рама 14 с обеими боковыми пластинами 24, 34, входной 213 и выходной 223 пластинами и продольным стержнем 25 имеет, тем самым, продольную линию тяжести, проходящую практически параллельно средней оси 13В измерительной трубки, воображаемым образом соединяющей входной 11 и выходной 12 концы.
На фиг.3 и 4 головки показанных винтов обозначают, что упомянутая фиксация боковых пластин 24, 34 на входной 213 и выходной 223 пластинах и продольном стержне 25 может происходить посредством свинчивания; однако, могут быть использованы и другие подходящие и известные специалисту виды крепления.
В случае, если измерительный преобразователь 10 следует соединить с трубопроводом разъемно, на измерительной трубке 13 с входной стороны отформован первый фланец 19, а с выходной стороны - второй фланец 20 (фиг.1); вместо фланцев 19, 20 для разъемного соединения с трубопроводом могут быть отформованы, например, также другие соединительные элементы, как, например, показанные на фиг.3 соединения типа Triclamp. В случае необходимости измерительная трубка 13 может быть соединена с трубопроводом также непосредственно, например, посредством сварки или пайки тугоплавким припоем и т.д.
Для создания упомянутых кориолисовых сил измерительную трубку 13 при работе измерительного преобразователя 10, приводимого в действие связанным с измерительной трубкой электромеханическим устройством 16 возбуждения, заставляют вибрировать с заданной частотой колебаний, в частности естественной резонансной частотой, в так называемом полезном режиме, в результате чего она заданным образом упруго деформируется, причем естественная резонансная частота зависит также от плотности текучей среды. В изображенном примере выполнения вибрирующая измерительная трубка 13, как это бывает у таких преобразовательных устройств изгибно-колебательного типа, отклоняется от статического исходного положения пространственно, в частности в боковом направлении. То же относится практически к таким преобразовательным устройствам, у которых одна или несколько изогнутых измерительных трубок совершают консольные колебания вокруг соответствующей продольной оси, воображаемым образом соединяющей входной и выходной концы, или же к таким преобразовательным устройствам, у которых одна или несколько прямых измерительных трубок совершают лишь изгибные колебания в единственной плоскости.
Устройство 16 возбуждения служит для того, чтобы при преобразовании введенной электронным блоком 50 прибора электрической мощности Рехс возбуждения создать действующую на измерительную трубку 13 силу Fexc возбуждения. Мощность Рехс возбуждения служит практически лишь для компенсации доли мощности, отобранной у колебательной системы вследствие механического или присущего текучей среде трения. Для достижения как можно более высокого кпд мощность Рехс возбуждения как можно более точно установлена с возможностью поддержания практически колебаний измерительной трубки 13 в полезном режиме, например основной резонансной частоты.
Для передачи силы Fexc возбуждения на измерительную трубку 13 устройство 16 возбуждения, как показано на фиг.5, содержит жесткий, приводимый в действие электромагнитным и/или электродинамическим путем рычажный механизм 15 с изгибно-жестко фиксированным на измерительной трубке 13 кронштейном 154 и ярмом 163. Ярмо 163 также изгибно-жестко фиксировано на отстоящем от измерительной трубки 13 конце кронштейна 154, а именно так, что оно расположено над измерительной трубкой 13 и поперек нее. В качестве кронштейна 154 может служить, например, металлическая шайба, которая размещает измерительную трубку 13 в своем отверстии. В отношении других подходящих выполнений рычажного механизма 15 здесь следует сослаться на уже упомянутую публикацию US-A 6006609. Рычажный механизм 15 выполнен Т-образным и расположен с возможностью воздействия на измерительную трубку 13 приблизительно посередине между входным 11 и выходным 12 концами (фиг.5), в результате чего она при работе испытывает посередине наибольшее боковое отклонение.
Для приведения в действие рычажного механизма 15 устройство 16 возбуждения содержит на фиг.5 первую катушку 26 возбуждения и соответствующий первый постоянно магнитный якорь 27, а также вторую катушку 36 возбуждения и соответствующий второй постоянно магнитный якорь 37. Обе катушки 26, 36 возбуждения, электрически включенные предпочтительно последовательно, фиксированы с обеих сторон измерительной трубки 13 под ярмом 163 на несущей раме 14, в частности разъемно, так, что при работе находятся во взаимодействии со своими якорями 27, 37. При необходимости, обе катушки 26, 36 возбуждения могут быть включены, само собой, также параллельно. Как показано на фиг.3 и 5, оба якоря 27, 37 фиксированы на ярме 163 на таком расстоянии друг от друга, что при работе измерительного преобразователя 10 якорь 27 пронизан практически магнитным полем катушки 26 возбуждения, а якорь 37 - практически магнитным полем катушки 36 возбуждения и движется вследствие соответствующих электродинамических и/или электромагнитных силовых воздействий. Созданные магнитными полями катушек 26, 36 возбуждения движения якорей 27, 37 передаются ярмом 163 и кронштейном 154 на измерительную трубку 13. Эти движения якорей 27, 37 таковы, что ярмо 163 попеременно отклоняется из своего исходного положения то в направлении боковой пластины 24, то в направлении боковой пластины 34. Соответствующая, параллельная уже упомянутой средней оси 13В измерительной трубки ось вращения рычажного механизма 15 может проходить, например, через кронштейн 154.
Несущая рама 14 включает в себя далее соединенный с боковыми пластинами 24, 34, в частности разъемно, держатель 29 электромеханического устройства 16 возбуждения, в частности для удержания катушек 26, 36 возбуждения и, при необходимости, отдельных компонентов описанного ниже магнитного тормозного устройства 217.
Наконец измерительный преобразователь 10 содержит охватывающий измерительную трубку и несущую раму корпус 100, который защищает их от вредных влияний окружающей среды. Корпус 100 снабжен шейкообразным переходником, на котором фиксирован охватывающий электронный блок 50 прибора корпус 200 (фиг.1).
У измерительного преобразователя 10 в примере выполнения боковые отклонения вибрирующей измерительной трубки 13, прочно зажатой на входном 11 и выходном 12 концах, вызывают одновременно упругую деформацию ее ширины 13А в свету, выполненного практически по всей длине измерительной трубки 13. Далее в измерительной трубке 13 вследствие действующего на нее через рычажный механизм 15 крутящего момента одновременно с боковыми отклонениями, по меньшей мере, на отдельных участках вынужденным образом происходит скручивание вокруг средней оси 13В, так что измерительная трубка 13 колеблется практически в служащем в качестве полезного режима смешанном изгибно-колебательно-крутильном режиме. Скручивание измерительной трубки 13 может быть при этом таким, что боковое отклонение удаленного от измерительной трубки 13 конца кронштейна 154 либо равно-, либо противонаправлено боковому отклонению измерительной трубки 13. Измерительная трубка 13 может совершать, следовательно, крутильные колебания в соответствующем равнонаправленному случаю первом изгибно-колебательно-крутильном режиме или в соответствующем противонаправленному случаю втором изгибно-колебательно-крутильном режиме. Тогда у измерительного преобразователя 10, согласно примеру выполнения, естественная основная резонансная частота во втором изгибно-колебательно-крутильном режиме, например 900 Гц, приблизительно вдвое выше, чем в первом изгибно-колебательно-крутильном режиме.
В случае если измерительная трубка 13 при работе должна совершать колебания только во втором изгибно-колебательно-крутильном режиме, в устройство 16 возбуждения встроено основанное на принципе вихревых токов магнитное тормозное устройство 217, которое служит для стабилизации положения упомянутой оси вращения. Посредством магнитного тормозного устройства 217 можно, тем самым, гарантировать, что измерительная трубка 13 всегда будет колебаться во втором изгибно-колебательно-крутильном режиме, а возможные внешние паразитные влияния на измерительную трубку 13 не приведут к самопроизвольному переходу в другой, в частности не в первый, изгибно-колебательно-крутильный режим. Подробности такого магнитного тормозного устройства подробно приведены в US-A 6006609.
Здесь следует еще упомянуть, что у отклоненной, таким образом, во втором изгибно-колебательно-крутильном режиме измерительной трубки 13 воображаемая средняя ось 13В незначительно деформируется и, следовательно, во время колебаний описывает не плоскость, а слегка выпуклую поверхность. Далее лежащая на этой поверхности, описанная центром средней оси 13В кривая имеет наименьшую кривизну из всех описанных средней осью 13В кривых.
Для детектирования деформаций измерительной трубки 13 измерительный преобразователь 10 содержит далее сенсорное устройство 60, которое посредством, по меньшей мере, одного, реагирующего на вибрации измерительной трубки 13 первого датчика 17 вырабатывает представляющий их первый, в частности аналоговый, измерительный сигнал s1 колебаний. Датчик 17 может быть образован, например, постоянно-магнитным якорем, который фиксирован на измерительной трубке 13 и находится во взаимодействии с удерживаемой несущей рамой 14 сенсорной катушкой. В качестве датчика 17 особенно пригодны такие, которые, основываясь на электродинамическом принципе, определяют скорость отклонений измерительной трубки 13. Могут использоваться также измеряющие ускорение электродинамические или же измеряющие путь резистивные или оптические датчики. Само собой, могут использовать также другие, известные специалисту и подходящие для детектирования таких вибраций датчики. Сенсорное устройство 60 содержит далее идентичный, в частности, первому датчику 17 второй датчик 18, посредством которого оно вырабатывает представляющий также вибрации измерительной трубки 13 второй измерительный сигнал S2 колебаний. Оба датчика 17, 18 удалены друг от друга в этом выполнении вдоль измерительной трубки 13, в частности расположены в измерительном преобразователе 10 на одинаковом расстоянии от середины измерительной трубки 13 с возможностью локального определения посредством сенсорного устройства 60 вибраций измерительной трубки 13 с входной и выходной сторон и преобразования в соответствующие измерительные сигналы s1, s2 колебаний. Первый s1 и, при необходимости, второй s2 измерительные сигналы колебаний, имеющие обычно частоту, соответствующую в данный момент частоте колебаний измерительной трубки 13, подают электронному блоку 50 прибора (фиг.2).
Для того чтобы заставить измерительную трубку 13 вибрировать, устройство 16 возбуждения питают также осциллирующим током iexc возбуждения задаваемой амплитуды и задаваемой частоты fexc возбуждения с возможностью его протекания через катушки 26, 36 возбуждения при работе и создания соответствующим образом необходимых для движения якорей 27, 37 магнитных полей. Ток iexc возбуждения может быть, например, синусообразным или прямоугольным. Частота fexc возбуждения тока iexc возбуждения у изображенного в примере выполнения измерительного преобразователя выбрана и задана преимущественно так, чтобы совершающая боковые колебания измерительная трубка 13 колебалась, по возможности, исключительно во втором изгибно-колебательно-крутильном режиме.
Для вырабатывания и задавания тока iexc возбуждения электронный блок 50 содержит соответствующую возбуждающую схему 53, управляемую представляющим задаваемую частоту fexc возбуждения частотно-устанавливающим сигналом уFM и представляющим задаваемую амплитуду тока iexc возбуждения амплитудно-устанавливающим сигналом уAM. Возбуждающая схема может быть реализована, например, осциллятором с управляемым напряжением и подключенным преобразователем напряжение-ток; вместо аналогового осциллятора для задавания тока iexc возбуждения может использоваться, например, также цифровой осциллятор с числовым управлением.
Для вырабатывания амплитудно-устанавливающего сигнала уAM может служить, например, встроенная в электронный блок 50 схема 51 регулирования амплитуды, которая с помощью амплитуды в данный момент, по меньшей мере, одного из обоих сигналов s1, s2 датчиков и с помощью соответствующего постоянного или переменного опорного значения W1 амплитуды актуализирует амплитудно-устанавливающий сигнал уAM; при необходимости, для вырабатывания амплитудно-устанавливающего сигнала уAM можно привлечь также амплитуду тока iexc возбуждения в данный момент. Подобные схемы регулирования амплитуды также известны специалисту. В качестве примера такой схемы регулирования амплитуды следует еще раз указать на кориолисовы массовые расходомеры серии ″PROMASS I″. Их схема регулирования амплитуды выполнена предпочтительно с возможностью регулирования боковых колебаний измерительной трубки 13 до постоянной, т.е. независимой от плотности ρ, амплитуды.
Кроме того, частотно-устанавливающий сигнал уFM может вырабатываться соответствующей схемой 52 регулирования частоты, которая актуализирует его, например, с помощью, по меньшей мере, одного сигнала s1 датчика, а также с помощью постоянного напряжения, служащего в качестве соответствующего опорного значения W2 частоты и представляющего частоту.
Предпочтительно схема 52 регулирования частоты и схема 51 регулирования амплитуды объединены в один фазорегулирующий контур, который известным специалисту образом используют для того, чтобы с помощью разности фаз, измеренной между, по меньшей мере, одним из сигналов s1, s2 датчиков и задаваемым или измеренным током iexc возбуждения, постоянно настраивать частотно-устанавливающий сигнал уFM на резонансную частоту измерительной трубки 13 в данный момент. Конструкция и применение таких фазорегулирующих контуров для эксплуатации измерительных трубок на одной из их механических резонансных частот подробно описаны, например, в US-A 4801897. Само собой, могут использоваться также другие, известные специалисту схемы регулирования частоты, как они описаны, например, в US-А 4524610 или US-A 4801897. Далее в отношении использования таких схем регулирования частоты для измерительных преобразователей описанного рода следует сослаться на уже упомянутую серию ″PROMASS I″. Другие схемы, пригодные в качестве возбуждающей схемы, могут быть взяты, например, также из US-A 5869770 или US-A 6505519.
Согласно другому варианту осуществления изобретения схема 51 регулирования амплитуды и схема 52 регулирования частоты реализованы предусмотренным в электронном блоке 50 цифровым процессором DSP обработки сигналов и соответственно внедренными в него и протекающими в нем программными кодами. Программные коды могут храниться, например, в энергонезависимом ЭППЗУ управляющего процессором обработки сигналов и/или контролирующего его микрокомпьютера 55 временно или же постоянно и при запуске процессора DSP загружаться во встроенную, например, в него энергозависимую оперативную память данных блока 50. Пригодными для подобных применений процессорами обработки сигналов являются, например, процессоры типа TMS320VC33, предлагаемые на рынке фирмой «Тексас Инструменте Инк.».
Само собой, понятно, что, по меньшей мере, сигнал s1 датчика и, при необходимости, также сигнал s2 датчика для обработки в процессоре DSP должны быть преобразованы посредством соответствующих аналого-цифровых преобразователей A/D в соответствующие цифровые сигналы (см., в частности, ЕР-А 866319). В случае необходимости подаваемые процессором устанавливающие сигналы, например амплитудно-устанавливающий сигнал уAM или частотно-устанавливающий сигнал уFM, следует соответствующим образом подвергнуть цифроаналоговому преобразованию.
Как показано на фиг.2, измерительные сигналы xs1, хs2 колебаний подаются далее к измерительной схеме 21 блока 50. Измерительная схема 21 служит для определения известным специалисту образом связанного с измеряемым массовым расходом измеряемого значения с помощью разности фаз, детектированной между обоими, при необходимости, предварительно подходящим образом кондиционированными измерительными сигналами xs1, хs2 колебаний. В качестве измерительной схемы 21 для этого могут служить традиционные, в частности цифровые, измерительные схемы, определяющие массовый расход с помощью измерительных сигналов xs1, хs2 колебаний (см., в частности, WO-A 02/37063, WO-A 99/39164, US-A 5648616, US-A 5069074). Само собой, могут быть использованы также другие, известные специалисту, пригодные для кориолисовых массовых расходомеров измерительные схемы, которые измеряют разности фаз и/или времени между измерительными сигналами xs1, хs2 колебаний и соответственно обрабатывают их. Предпочтительным образом измерительная схема 21 может быть реализована также процессором DSP.
Как уже сказано, неоднородности в протекающей среде, например уносимые жидкостями газовые пузырьки или образовавшиеся в жидкостях пенные слои, могут привести к тому, что это измеренное значение, полученное обычным образом с предположением однородной среды, будет еще недостаточно точно совпадать с фактическим массовым расходом, т.е. оно должно быть соответственно поправлено; это предварительно определенное, временно представляющее массовый расход измеренное значение называется поэтому первым промежуточным значением X'm, из которого также посредством обрабатывающей электронной схемы 21 выводят измеренное значение Хm, достаточно точно представляющее массовый расход.
Уже в уровне техники в этом отношении обсуждалось, что такие неоднородности, обусловленные принципом измерений, преимущественно выражаются в изменении измеренной плотности протекающей среды. Продолжаемые авторами исследования привели, однако, к тому неожиданному выводу, что коррекция промежуточного значения X'm, вопреки уровню техники, может быть проведена, с одной стороны, с использованием немногих, очень просто определяемых корректировочных коэффициентов, которые вполне могут быть выведены из непосредственно измеренных параметров, в частности измеренной плотности и временно измеренного массового расхода. С другой стороны, коррекция может быть произведена с использованием предварительно полученного измеренного значения Хρ плотности и предварительно полученного промежуточного значения X'm с затратами на расчеты, которые очень малы по сравнению с упомянутыми выше, скорее комплексными методами расчета.
Для точного измерения массового расхода посредством обрабатывающей электронной схемы 2 из промежуточного значения X'm выводят соответствующее корректировочное значение ХК и измеренное значение Хm массового расхода с использованием корректировочного значения ХК вычисляют до промежуточного значения X'm, в частности цифровым путем. Например, коррекция может осуществляться простым образом на основе уравнения функции, являющегося кодированной математической формулой (1).
Согласно изобретению обрабатывающая электронная схема выводит для этого из промежуточного значения X'm второе промежуточное значение Х2, представляющее функциональное значение степенной функции X'm n с промежуточным значением X'm в качестве основания и, в частности, рациональным показателем n, который меньше нуля, т.е. второе промежуточное значение X2 должно отвечать функциональной взаимосвязи:
 .
.
причем КК обозначает служащий для согласования или масштабирования промежуточного значения Х2 коэффициент, который предварительно, например, индивидуально, определен при тарировке кориолисова массового расходомера 1 или же специфически для данного типа прибора и может храниться в цифровой форме, например в энергонезависимом ЭППЗУ. Согласно одному варианту осуществления изобретения показатель n при этом выбран больше -1, например -0,5 или -0,25.
Согласно одному усовершенствованию изобретения посредством обрабатывающей электронной схемы с помощью измеренного значения Хρ плотности и предварительно определенного или измеренного близко по времени значения Кρ опорной плотности, которое может храниться, например, в виде постоянного значения при пуске кориолисова массового расходомера в работу или передаваемого к нему извне при работе, определяют отклонение Δρ плотности ρ среды от заданной опорной плотности. Для получения корректировочного значения ХК определяемое, таким образом, отклонение Δρ вычисляют со вторым промежуточным значением Х2, основанном на уравнении функции:

Зная измеряемую текучую среду, значение Кρ опорной плотности можно ввести вручную, например, на месте или с центрального пункта управления, или послать электронному блоку прибора с внешнего плотномера, например через полевую шину.
Согласно одному варианту осуществления изобретения значение Кρ опорной плотности определяют с использованием также хранящегося в электронном блоке прибора измеренного значения Xρ,0 плотности, причем хранящееся измеренное значение Xρ,0 плотности представляет плотность среды, измеренную у однородной среды или при предполагаемой как однородная среды. Согласно одному усовершенствованию этого варианта осуществления изобретения хранящееся в качестве значения Кρ опорной плотности измеренное значение Xρ,0 плотности используют для последующей коррекции промежуточного значения X'm, предварительно полученного у неоднородной среды. Этот вариант осуществления изобретения может особенно предпочтительным образом применяться, например, в процессе дозирования или розлива, когда, с одной стороны, в пределах одной загрузки в короткой временной последовательности в измерительной трубке господствуют в значительной степени отличные друг от друга условия течения, в частности также при не полностью заполненной измерительной трубке, и когда, с другой стороны, интерес представляет преимущественно обобщенный по всей загрузке массовый расход, в конце концов вся масса заполненной измерительной трубки.
Используя уравнение (2), можно с помощью уравнения (3) определить корректировочное значение ХK простым образом на основе уравнения функции, являющегося кодированной математической формулой (4).
Названные, служащие для получения измеренного значения Хm массового расхода функции, символизированные уравнениями (1)-(4), могут быть, по меньшей мере, частично реализованы в обрабатывающей ступени 54 электронного блока 50. Обрабатывающая ступень 54 может быть предпочтительным образом реализована, например, также процессором DSP или, например, также упомянутым выше микрокомпьютером 55.
Формирование и реализация соответствующих алгоритмов, которые соответствуют приведенным уравнениям или моделируют принцип действия схемы 51 регулирования амплитуды или схемы 52 регулирования частоты и преобразование которых в выполняемые в таких процессорах обработки сигналов программные коды, специалисту известны и поэтому не требуют более подробного пояснения. Само собой, приведенные уравнения вполне могут быть полностью или частично отображены в электронном блоке 50 посредством соответствующих дискретных, аналоговых и/или цифровых вычислительных схем.
Согласно другому варианту осуществления изобретения обрабатывающая электронная схема 2 содержит далее табличную память, в которую предварительно, например, при тарировке кориолисова массового расходомера, записан комплект вычисленных цифровых корректировочных значений ХК,i. К этим корректировочным значениям ХК,i обращаются через адрес памяти, выведенный посредством полученного в данный момент промежуточного значения X2. Корректировочное значение ХК может быть получено простым образом, например, за счет того, что полученное в данный момент промежуточное значение Х2 сравнивают с соответствующими, записанными в табличную память заданными значениями промежуточного значения Х2 и выбирают вслед за этим то корректировочное значение XК,i, которое соответствует ближайшему к промежуточному значению Х2 заданному значению. В качестве табличной памяти может служить ППЗУ, т.е. СППЗУ или ЭППЗУ. Использование такой табличной памяти имеет, в том числе, то преимущество, что корректировочное значение ХK после вычисления промежуточного значения Х2 очень быстро имеется в распоряжении ко времени выполнения программы. К тому же записанные в табличную память корректировочные значения XK,i с помощью немногих тарировочных измерений можно определить предварительно очень точно, например, на основе уравнения (2) и при применении метода наименьших квадратов.
Изобретение предназначено для измерения соответствующего физического параметра двух-или более фазной текучей среды (в частности, жидкости, в которую вводят воздух, либо склонной к ценообразованию). Кориолисовый массовый расходомер/плотномер содержит вставленную в трубопровод измерительную трубку, устройство возбуждения изгибных колебаний трубки, датчики для вырабатывания измерительных сигналов (xs1, xs2), представляющих колебания на входе и выходе измерительной трубки. Обрабатывающая электронная схема (2) создает выведенное из измерительных сигналов (xs1, xs2) промежуточное значение (Х'm) некорректированного массового расхода и корректировочное значение (ХK), которое выведено из измерительных сигналов (xs1, xs2), в частности второго измеренного значения (Хρ), созданного также в обрабатывающей электронной схеме и представляющего плотность среды. С использованием значений (X'm) и (ХK) обрабатывающая электронная схема создает измеренное значение (Хm) массового расхода. Изобретение обеспечивает повышение точности измерения неоднородных текучих сред при одновременном упрощении процесса измерения. 7 з.п. ф-лы, 5 ил.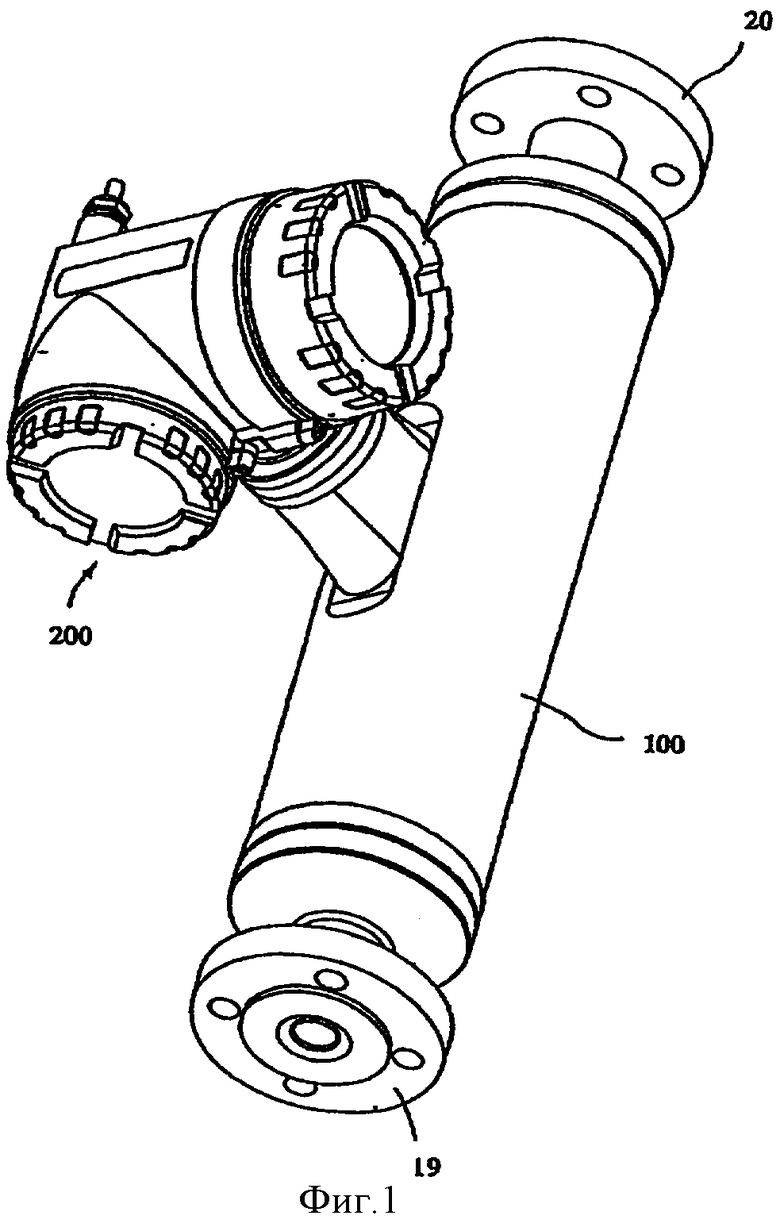
по меньшей мере, одну вставленную в трубопровод измерительную трубку (13), обтекаемую при работе средой;
несущую раму (14), фиксированную на входном и выходном концах измерительной трубки (13) и зажимающую ее тем самым с возможностью ее вибрации;
устройство возбуждения (16), выполненное с возможностью приведения измерительной трубки (13) при работе в механические колебания, в частности изгибные колебания;
датчики (17, 18) колебаний для вырабатывания первого измерительного сигнала (xs1) колебаний, представляющего колебания на входе измерительной трубки (13), и второго измерительного сигнала (xs2) колебаний, представляющего колебания на выходе измерительной трубки (13);
обрабатывающую электронную схему (50), которая выполнена с возможностью вырабатывания выведенного из измерительных сигналов (xs1, xs2) колебаний, предварительно представляющего измеряемый массовый расход первого промежуточного значения (X'm) и выведенного из первого промежуточного значения (X'm) корректировочного значения (XK) для первого промежуточного значения (X'm) и с возможностью определения посредством первого промежуточного значения (X'm) и корректировочного значения (XK) измеренного значения (Хm) массового расхода, представляющего измеряемый массовый расход,
причем обрабатывающая электронная схема выполнена с возможностью вырабатывания корректировочного значения (ХK) с использованием выведенного из первого промежуточного значения (X'm) второго промежуточного значения (Х2), представляющего функциональное значение степенной функции (X'm n) с промежуточным значением (X'm) в качестве основания и, в частности, рациональным показателем (n), который меньше нуля.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 6505519 B2, 14.01.2003 | |||
| Привод периодического вращения | 1979 |
|
SU831306A1 |
| RU 2002102237 A, 10.10.2003. | |||

