Область техники, к которой относится изобретение
Настоящее изобретение относится к протезу стопы с высокими функциональными характеристиками, обеспечивающими совершенствование возможностей динамического реагирования в той мере, насколько данные возможности зависят от прикладной механики сил.
Обзор состояния техники
Бесшарнирная искусственная стопа для ножного протеза предложена в патенте США № 5897594, автор Martin et al (Мартин с соавторами). В отличие от предшествующих решений, в которых искусственная стопа имеет жесткую конструкцию, снабженную шарниром для имитации функции голеностопного сустава, бесшарнирная искусственная стопа Мартина с соавторами использует упругую стопную вставку, которая расположена внутри формованной стопы. Вставка имеет в продольном сечении приблизительно C-образную форму, раскрытую назад, воспринимает протезную нагрузку своим верхним C-лепестком и своим нижним C-лепестком передает данную нагрузку на плоскую пружину, соединенную с упомянутой вставкой. На виде снизу плоская пружина имеет выгнутую форму и продолжается приблизительно параллельно области подошвы вперед за стопную вставку в область оконечности стопы. Изобретение Мартина с соавторами создано для усовершенствования бесшарнирной искусственной стопы в части амортизации удара пяткой, эластичности, перекатывания с пятки на носок при ходьбе и поперечной устойчивости, чтобы тем самым дать пользователю возможность ходить естественным образом, при этом целью является предоставление пользователю возможности как нормально ходить пешком, так и выполнять физические упражнения и играть в спортивные игры. Однако характеристики динамической реакции данной известной искусственной стопы ограничены и не имитируют характерную для человека биомеханическую функцию человеческой стопы, голеностопного сустава и голени и мягкой опорной ткани. Искусственная стопа Мартина с соавторами и другие известные протезы стопы, которые используют упомянутую конструкцию голеностопного сустава и жесткий пилон ножного протеза, имитирующий голень, не способны накапливать достаточно энергии упругой деформации для выработки во время шага нормальной динамической мощности в сагиттальной плоскости голеностопного сустава. Испытания показали, что известные протезы стопы с упомянутыми конструкциями производят во время шага только около 25% от нормальной кинетической энергии в сагиттальной плоскости голеностопного сустава.
Ван Л. Филипс (Van L. Phillips) предложил другие протезы стопы, которые, по его утверждению, обеспечивают ампутанту маневренность и подвижность при занятии различными видами деятельности, которые исключались в прошлом из-за конструктивных ограничений и соответствующих функциональных характеристик известных протезов. По утверждению изобретателя данные известные стопы стойко выдерживают бег, прыжки и другие виды деятельности и, по имеющимся данным, позволяют пользователю заниматься такими же видами деятельности, как и обычная стопа. См., например, патенты США №6071313; 5993488; 5899944; 5800569; 5800568; 5728177; 5728176; 5824112; 5593457; 5514185; 5181932 и 4822363. Данные протезы содержат стопу, голеностопный сустав и голень, выполненные из композитного материала, при этом голеностопный сустав по механической форме обращен назад выпуклым изгибом. Испытания показали, что известные протезы данной конструкции производят во время шага около 40% от нормальной кинетической энергии в сагиттальной плоскости голеностопного сустава человека. Существует потребность в протезе с более высокими функциональными характеристиками, который может повысить двигательные показатели ампутанта при таких видах деятельности, как ходьба, бег, прыжки и рывки.
Сущность изобретения
Чтобы обеспечить повышение двигательных возможностей спортсмена с ампутированной ногой, требуется протез стопы с высокими функциональными характеристиками и усовершенствованной прикладной механикой, причем необходимо, чтобы стопа могла превосходить по функциональным характеристикам человеческую стопу, а также известные протезы стоп. Спортсмен с ампутированной ногой заинтересован в таком протезе стопы с высокими функциональными характеристиками, усовершенствованной прикладной механикой, комбинированной высокой/низкой динамической реакцией и возможностью регулировки относительного расположения, который можно точно настраивать для совершенствования горизонтальной и вертикальной составляющих движения, которые могут быть специализированы в соответствии с характером конкретной естественной задачи.
Протез стопы в соответствии с настоящим изобретением предназначен для удовлетворения вышеупомянутых потребностей. В соответствии с наглядным вариантом осуществления, приведенным в настоящем описании, протез стопы согласно настоящему изобретению содержит продольно продолжающийся стопный киль с участком переднего отдела стопы на одном конце, участком заднего отдела стопы на противоположном конце и относительно длинным участком среднего отдела стопы, продолжающимся между участками переднего отдела стопы и заднего отдела стопы и дугообразно изогнутым вверх от данных участков. Обеспечена также стойка голени, содержащая изогнутый выпуклостью вниз нижний конец. Регулируемое крепежное приспособление присоединяет изогнутый нижний конец стойки голени к дугообразно изогнутому вверх участку среднего отдела стопы, принадлежащему стопному килю, для образования области голеностопного сустава протеза стопы.
Регулируемое крепежное приспособление позволяет производить регулировку расположения стойки голени и стопного киля друг относительно друга в продольном направлении стопного киля для настройки функциональных характеристик протеза стопы. Посредством регулировки расположения дугообразно изогнутого вверх участка среднего отдела стопы, принадлежащего стопному килю, и противостоящего ему изогнутого выпуклостью вниз нижнего конца стойки голени друг относительно друга в продольном направлении стопного киля достигают изменения характеристик динамического реагирования и результирующих перемещений стопы соответственно конкретной задаче в зависимости от необходимых/желательных горизонтальной и вертикальной линейных скоростей. Предлагается универсальный протез стопы, который обладает возможностями высокого и низкого динамического реагирования, а также двухплоскостными кинематическими характеристиками, и который повышает результирующие функциональные возможности ампутантов, занимающихся спортивными и/или оздоровительными видами деятельности. Приведено также описание протеза стопы, специально предназначенной для спринтерского бега.
Протез стопы может также содержать устройство, предназначенное для того, чтобы ограничивать протяженность перемещения верхнего конца стойки голени в ответ на приложение и снятие силовой нагрузки на стойку голени во время применения протеза стопы. В одном варианте осуществления устройство представляет собой поршневой узел, прикрепленный между верхним и нижним концами стойки голени и содержащий, по меньшей мере, одну находящуюся под давлением текучую среду для ограничения протяженности перемещения, а также для поглощения энергии, накапливаемой или высвобождаемой во время сжатия и расширения стойки голени. В других вариантах осуществления заднее устройство голени накапливает собственную потенциальную энергию во время приложения силовой нагрузки на протез и возвращает накопленную энергию во время снятия силовой нагрузки в дополнение к возможности накопления суммарной энергии упругой деформации, что повышает динамическую мощность толкающей силы, производимой протезом стопы во время шага. В еще одних вариантах осуществления предлагается искусственная мышца на, по меньшей мере, стопе, голеностопном суставе и стойке протеза для увеличения потенциальной энергии протеза и динамической мощности в сагиттальной плоскости голеностопного сустава во время шага. Искусственная мышца на протезе может также продолжаться на смежную опорную конструкцию на культе пользователя, например на приемную муфту или на коленную обойму протеза, или упомянутая мышца может быть прикреплена к проксимальному концу колена человека или протеза.
Упомянутые и другие цели, признаки и преимущества настоящего изобретения очевидны из рассмотрения нижеследующего подробного описания примеров осуществления настоящего изобретения и прилагаемых чертежей.
Краткое описание чертежей
Фиг.1 - схематичное изображение двух смежных радиусов кривизны R1 и R2 прижатых друг к другу стопного киля и стойки голени протеза стопы в соответствии с настоящим изобретением, который обеспечивает возможности динамического реагирования и результирующего перемещения стопы во время шага в направлении по стрелке B, которая перпендикулярна касательной линии A, соединяющей два радиуса.
Фиг.2 - вид, аналогичный виду на фиг.1, но показывающий взаимное расположение двух радиусов, измененное в протезе стопы в соответствии с настоящим изобретением, чтобы увеличить горизонтальный компонент и уменьшить вертикальный компонент характеристики динамического реагирования и результирующего перемещения стопы во время шага, так что стрелка B1, перпендикулярная к касательной линии A1, направлена ближе к горизонтали, чем в случае, изображенном на фиг.1.
Фиг.3 - вид сбоку протеза стопы в соответствии с примером осуществления настоящего изобретения с переходником пилона ножного протеза и присоединенным к данному переходнику пилоном ножного протеза для закрепления стопы к культе ампутанта.
Фиг.4 - вид спереди протеза стопы с переходником пилона ножного протеза и пилоном ножного протеза, показанными на фиг.3.
Фиг.5 - вид сверху варианта осуществления, изображенного на фиг.3 и 4.
Фиг.6 - вид сбоку другого стопного киля в соответствии с настоящим изобретением, в частности для спринтерского бега, который можно применить в протезе стопы в соответствии с настоящим изобретением.
Фиг.7 - вид сверху стопного киля, показанного на фиг.6.
Фиг.8 - вид снизу стопного киля протеза стопы, изображенного на фиг.3, который обеспечивает комбинированные характеристики высокого/низкого динамического реагирования, а также возможности двухплоскостной подвижности.
Фиг.9 - вид сбоку дополнительного стопного киля в соответствии с настоящим изобретением для протеза стопы, особенно подходящего для спринтерского бега ампутанту, которому произведена операция вычленения стопы Сайма.
Фиг.10 - вид сверху стопного киля, показанного на фиг.9.
Фиг.11 - дополнительный вариант стопного киля для протеза стопы в соответствии с настоящим изобретением, предназначенного для ампутанта с вычленением стопы Сайма, где стопный киль обеспечивает протезу стопы комбинированные характеристики высокого/низкого динамического реагирования, а также возможности двухплоскостной подвижности.
Фиг.12 - вид сверху стопного киля, показанного на фиг.11.
Фиг.13 - вид сбоку стопного киля в соответствии с настоящим изобретением, у которого толщина киля сужается, например постепенно сужается от участка среднего отдела стопы к участку заднего отдела стопы киля.
Фиг.14 - вид сбоку другого по форме стопного киля, у которого толщина сужается от среднего отдела стопы как к переднему отделу стопы, так и к заднему отделу стопы киля.
Фиг.15 - вид сбоку и немного сверху и спереди параболически изогнутой стойки голени протеза стопы в соответствии с настоящим изобретением, причем толщина стойки голени сужается к ее верхнему концу.
Фиг.16 - вид сбоку, напоминающий вид на фиг.15, но изображающий другую стойку голени, сужающуюся от середины к ее верхнему и нижнему концам.
Фиг.17 - вид сбоку C-образной стойки голени протеза стопы, причем толщина стойки голени сужается от середины к ее верхнему и нижнему концам.
Фиг.18 - вид сбоку другого примера C-образной стойки голени протеза стопы, причем толщина стойки голени постепенно уменьшается от ее среднего участка к ее верхнему концу.
Фиг.19 - вид сбоку S-образной стойки голени протеза стопы, причем толщина данной стойки постепенно уменьшается к обоим концам от ее середины.
Фиг.20 - дополнительный пример S-образной стойки голени, которая сужается по толщине только на ее верхнем конце.
Фиг.21 - вид сбоку J-образной стойки голени, суженной на каждом конце, для протеза стопы в соответствии с настоящим изобретением.
Фиг.22 - вид, напоминающий вид на фиг.21, но изображающий J-образную стойку голени, которая постепенно сужается по толщине только к ее верхнему концу.
Фиг.23 - вид сбоку и немного сверху соединительной детали из металлического сплава или пластика, используемой в регулируемом крепежном приспособлении в соответствии с настоящим изобретением для прикрепления стойки голени к стопному килю, как показано на фиг.3.
Фиг.24 - вид сбоку и немного спереди переходника пилона ножного протеза, используемого на протезе стопы, показанном на фиг. 3-5, и пригодного также для стопы, показанной на фиг.28 и 29, для присоединения стопы к пилону ножного протеза, который должен крепиться к культе ампутанта.
Фиг.25 - вид сбоку другого протеза стопы в соответствии с настоящим изобретением, аналогичного протезу стопы, показанному на фиг.3, но изображающий применение соединительной детали с двумя съемными крепежными средствами, продольно разнесенными и соединяющими деталь со стойкой голени и стопным килем соответственно.
Фиг.26 - вид сбоку с увеличением соединительной детали, показанной на фиг.25.
Фиг.27 - вид сбоку с увеличением стойки голени протеза стопы, показанного на фиг.25.
Фиг.28 - вид сбоку дополнительного примерного варианта осуществления протеза стопы, сходного с вариантами, изображенными на фиг.3 и 25, в котором ограничивающее перемещение амортизирующее устройство прикреплено между соответствующими концами стойки голени, чтобы ограничивать протяженность перемещения верхнего конца стойки голени в ответ на приложение и снятие силовой нагрузки на стойку голени при использовании протеза стопы.
Фиг.29 - вид спереди протеза при наблюдении слева на протез стопы, изображенный на фиг.28, где показана продольная прорезь в стойке голени стопы.
Фиг.30 - вид сзади протеза стопы при наблюдении справа на протез стопы, изображенный на фиг.28.
Фиг.31 - вид снизу протеза стопы, показанного на фиг.28.
Фиг.32 - вид сбоку стойки голени и стопного киля протеза стопы, показанного на фиг.28, представляющий пример перемещения верхнего конца стойки голени в результате приложения и снятия силовой нагрузки на стойку голени во время использования протеза стопы.
Фиг.33 - вид сбоку еще одного дополнительного примерного варианта осуществления протеза стопы, аналогичного варианту, показанному на фиг.28-32, за исключением того, что применена гибкая лента для ограничения только протяженности перемещения расширения верхнего конца стойки голени.
Фиг.34 - вид сбоку другого варианта осуществления протеза стопы с центровочным соединительным устройством, расположенным на переходнике, присоединенном к верхнему концу стойки голени, для крепления стопы к приемной муфте протеза, закрепляемой на ноге ампутанта, причем центровочное соединительное устройство допускает медиально-латеральное и передне-заднее скользящее регулировочное перемещение стопы относительно приемной муфты протеза.
Фиг.35 - вид спереди протеза стопы, показанного на фиг.34, при наблюдении слева на стопу, показанную на фиг.34.
Фиг.36 - вид сзади протеза стопы, показанного на фиг.34, при наблюдении справа на стопу, показанную на фиг.34.
Фиг.37 - вид сверху другого стопного киля для протеза правой стопы в соответствии с настоящим изобретением, где задний конец стопы параллелен фронтальной плоскости, например перпендикулярен продольной оси A-A стопы, и продольная ось F-F проксимальной вогнутости заднего отдела стопы также перпендикулярна продольной оси A-A.
Фиг.38 - вид сбоку стопного киля, показанного на фиг.37, при наблюдении в направлении с боковой стороны стопного киля.
Фиг.39 - вид сверху дополнительного стопного киля в соответствии с изобретением, аналогичного стопному килю, показанному на фиг.37 и 38, но при этом продольная ось F′-F′проксимальной вогнутости заднего отдела стопы образует тупой угол Δ′ с продольной осью A-A, что делает латеральный напряженный опорный участок заднего отдела стопы фактически длиннее и более гибким, чем медиальный напряженный опорный участок, чтобы способствовать вывороту наружу стопы при опоре на пятку во время шага.
Фиг.40 - вид сбоку стопного киля, показанного на фиг.39, при наблюдении с боковой стороны стопного киля.
Фиг.41 - вид сбоку дополнительного варианта осуществления протеза стопы, содержащего упругое заднее устройство голени, прикрепленное между верхним участком стойки голени и соединительной деталью, присоединяющей стойку голени к стопному килю, причем устройство накапливает энергию в пружинах устройства при приложении силовой нагрузки во время шага и возвращает накопленную энергию при снятии силовой нагрузки, чтобы повысить динамическую мощность толкающей силы, производимой протезом стопы во время шага.
Фиг.42 - вид сзади протеза, показанного на фиг.41.
Фиг.43 - вид сбоку дополнительного варианта осуществления протеза стопы, содержащего заднее устройство голени для повышения динамической мощности толкающей силы, производимой протезом стопы во время шага, причем входящая в устройство лента регулируемой длины натянута между верхним участком стойки голени и передним концом стопного киля.
Фиг.44 - вид сзади протеза, показанного на фиг.43.
Фиг.45 - вид снизу протеза, показанного на фиг. 43 и 44, где изображен натяжной трос, соединенный с каждой стороной стопного киля и продолжающийся назад.
Фиг. 46A-46D - виды сбоку соответствующих примеров конструкций искусственных мышц, предназначенных для применения с протезом в соответствии с изобретением для увеличения потенциальной энергии протеза и динамической мощности в сагиттальной плоскости голеностопного сустава во время шага.
Фиг. 47A-47E - виды сбоку соответствующих отличающихся моделей искусственной мышцы для применения с протезом в соответствии с изобретением.
Фиг.48A - вид сбоку длинной искусственной мышцы, в которой площадь поперечного сечения составляют 12 линейно расположенных единиц площади.
Фиг.48B - вид сбоку более короткой, но более широкой искусственной мышцы, у которой площадь поперечного сечения содержит то же количество, 12 единиц площади, как в искусственной мышце, показанной на фиг.48A.
Фиг.49 - вертикальная проекция вида сбоку и снизу оболочки или покрытия стопы для протеза в соответствии с изобретением, причем оболочка стопы содержит искусственную мышцу, соединяющую передний и задний подошвенные участки оболочки стопы.
Фиг.50 - вид сбоку стопного киля для протеза в соответствии с изобретением, причем стопный киль снабжен искусственной мышцей, соединяющей передний и задний подошвенные участки стопного киля.
Фиг.51 - вид сбоку стойки голени и соединительной детали протеза в соответствии с изобретением, содержащей искусственную мышцу, кулачок для регулируемого натяжения искусственной мышцы и датчик для определения усилия в протезе во время шага и управления кулачком и натяжением искусственной мышцы в ответ на определяемое усилие и в зависимости от него.
Фиг.52A-52D - виды сбоку соответствующих накладок разного размера, причем накладки пригодны для избирательной установки между протезом и искусственной мышцей, чтобы пользователь мог регулировать предварительную растягивающую нагрузку на мышцу перед применением протеза и, тем самым, изменять потенциальную энергию протеза.
Фиг.53 - вертикальная проекция вида сбоку и сзади протеза в соответствии с изобретением, где показана искусственная мышца, установленная на протезе и соединяющая приемную муфту для культи пользователя и нижний конец стойки голени протеза.
Фиг.54 - вертикальная проекция вида сбоку и сзади приемной муфты для культи ноги человека, причем приемная муфта применима с протезом в соответствии с изобретением и содержит камеру, вмещающую находящуюся под давлением текучую среду, установленную на данной муфте для использования между приемной муфтой и искусственной мышцей, не показанной, для регулировки натяжения мышцы в качестве предварительной нагрузки перед применением.
Подробное описание вариантов осуществления
Как показано на чертежах, протез 1 стопы согласно примеру осуществления на фиг.3-5 содержит продольно продолжающийся стопный киль 2 с участком 3 переднего отдела стопы на одном конце, участком 4 заднего отдела стопы на противоположном конце и дуговидно изогнутым вверх участком 5 среднего отдела стопы, продолжающимся между участками переднего отдела стопы и заднего отдела стопы. В примере осуществления участок 5 среднего отдела стопы изогнут выпуклостью вверх на его полном продольном протяжении между участками переднего и заднего отделов стопы.
Выступающая вверх стойка 6 голени стопы 1 прикреплена на участке изогнутого выпуклостью вниз нижнего конца 7 упомянутой стойки к проксимальной задней поверхности принадлежащего килю участка 5 среднего отдела стопы съемным крепежным средством 8 и соединительной деталью 11. В примере осуществления крепежное средство 8 представляет собой единственный болт с гайкой и шайбами, но может также представлять собой разъемный зажим или другое крепежное средство для надежного позиционирования и фиксации стойки голени на стопном киле, когда крепежное средство затянуто.
Продольно удлиненное отверстие 9 выполнено в проксимальной задней поверхности принадлежащего килю участка 5 среднего отдела стопы, как показано на фиг.8. Продольно удлиненное отверстие 10 выполнено также в изогнутом нижнем конце 7 стойки 6 голени, например, как показано на фиг.15. Съемное крепежное средство 8 проходит сквозь отверстия 9 и 10, чтобы можно было отрегулировать в правильное положение стойку голени и стопный киль относительно друг друга в продольном направлении A-A на фиг.5, когда крепежное средство 8 ослаблено или разъединено для настройки функциональной характеристики протеза стопы под конкретную задачу. Тем самым, крепежное средство 8, соединительная деталь 11 и продольно удлиненные отверстия 9 и 10 составляют регулируемое крепежное приспособление для прикрепления стойки голени к стопному килю для образования области голеностопного сустава протеза стопы.
Результат регулировки взаимного расположения стойки 6 голени и стопного киля 2 очевиден из рассмотрения фиг. 1 и 2, на которых двумя радиусами R1 и R2, одним непосредственно около другого, изображены смежные, обращенные друг к другу, выпуклые или выпукло-изогнутые поверхности среднего участка 5 стопного киля и стойки 6 голени. Из рассмотрения двух данных радиусов, одного непосредственно около другого, следует, что перемещение может совершаться перпендикулярно касательной линии A на фиг.1, A1 на фиг.2, проведенной к двум данным радиусам. Взаимосвязанное расположение двух данных радиусов определяет направление результирующих перемещений. Вследствие этого приложение силы, определяемой динамической реакцией стопы 1, зависит от упомянутого взаимосвязанного расположения. Чем больше радиус вогнутой поверхности, тем больше возможность динамической реакции. Однако чем круче радиус, тем быстрее реакция.
Возможность регулировки относительного расположения стойки голени и стопного киля в протезе стопы в соответствии с настоящим изобретением позволяет сдвигать радиусы так, чтобы воздействовать на горизонтальную или вертикальную линейные скорости стопы при спортивных занятиях. Например, для повышения максимально возможной горизонтальной линейной скорости протеза 1 стопы можно изменить относительное расположение, чтобы воздействовать на взаимосвязанное расположение радиуса стойки голени и радиуса стопного киля. А именно, чтобы повысить характеристику горизонтальной линейной скорости, нижний радиус R2 стопного киля сдвигают дистальнее его начального положения, как показано на фиг.2 в сравнении с фиг.1. Это изменяет характеристики динамической реакции так, что результирующие перемещения стопы 1 должны быть направлены ближе к горизонтали, и, в результате, может быть достигнута более высокая горизонтальная линейная скорость при одинаковых прилагаемых усилиях.
Ампутант может на практике найти такую настройку для каждого занятия спортом, которая отвечает его/ее потребностям, когда данные потребности связаны с горизонтальной и вертикальной линейными скоростями. Прыгун и баскетболист нуждаются, например, в более высоком подъеме по вертикали, чем бегун на спринтерскую дистанцию. Соединительная деталь 11 представляет собой передвижную соединительную деталь из пластика или металлического сплава (см. фиг.3, 4 и 23), вкладываемую между скрепляемыми стопным килем 2 и стойкой 6 голени. Съемное крепежное средство 8 проходит сквозь отверстие 12 в соединительной детали. Соединительная деталь продолжается вдоль прикрепляемого участка стойки голени и проксимальной задней поверхности принадлежащего килю участка 5 среднего отдела стопы.
Изогнутый нижний конец 7 стойки 6 голени имеет форму параболы с минимальным радиусом кривизны параболы, находящимся на нижнем конце, и продолжается вверх и вначале вперед по контуру параболы. Обращенная назад вогнутая поверхность образована выгибом стойки голени, как показано на фиг.3. Параболическая форма дает преимущество потому, что благодаря относительно большим радиусам проксимальной оконечности параболы данная форма обладает улучшенными характеристиками динамических реакций с точки зрения развития большей горизонтальной линейной скорости и, в то же время, имеет нижний конец с меньшим радиусом кривизны для формирования характеристик, определяющих быстрые реакции. Большие радиусы кривизны на верхнем конце параболической формы позволяют касательной линии A, описанной со ссылками на фиг.1 и 2, оставаться ближе к вертикали при изменении относительного расположения, что обеспечивает развитие большей горизонтальной линейной скорости.
Стойка голени параболической формы реагирует на усилия в начальной фазе контакта во время шага человека сжатием или своим закручиванием. Тем самым, радиусы параболической кривой становятся меньше, и, в результате, меньше сопротивление сжатию. Напротив, когда стойка голени параболической формы реагирует расширением на силы реакции опоры (GRF) при отрыве пятки во время шага человека, радиусы параболической кривой увеличиваются, и, в результате, сопротивление оказывается намного больше, чем вышеупомянутое сопротивление сжатию. Данные сопротивления связаны с функцией передней и задней мышц голени человека во время шага человека. С начальной фазы контакта до фазы опоры на полную стопу во время шага человека меньшая передняя группа мышц голени реагирует на силы реакции опоры (GRF) эксцентричным сокращением для опускания стопы на опору, и создается момент тыльного сгибания. C фазы опоры на полную стопу до фазы отрыва носка большая задняя группа мышц голени реагирует на силы реакции опоры (GRF) также эксцентричным сокращением, и создается более мощный момент сгибания подошвы. Величина данного момента зависит от разности размеров передней и задней групп мышц голени. В результате, имитируется сопротивление стойки голени протеза моментам тыльного сгибания и сгибания подошвы во время шага человека, и обеспечивается нормальный шаг. Переменная сопротивляемость параболических кривых имитирует функцию мускулатуры человеческой голени во время шага человека и занятий бегом и прыжками, и, в результате, обеспечивается эффективность протеза.
Человек идет шагом со скоростью около трех миль в час. Бегун на милю с результатом 4:00 минуты бежит со скоростью 12 миль в час, и спринтер на 100-метровку с результатом 10 секунд бежит со скоростью 21 миля в час. Соотношение скоростей при этом составляет 1:4:7. Горизонтальная составляющая в каждом случае тем больше, чем больше скорость вида спорта. Следовательно, можно задавать радиусы стойки голени протеза. Пешеходу требуется параболически изогнутая стойка голени с меньшими радиусами, чем бегуну на милю и спринтеру. Спринтеру требуется параболически изогнутая стойка голени, которая в семь раз больше. Данное отношение показывает, как определять радиусы парабол для пешеходов, бегунов и спринтеров. Вышесказанное имеет большое значение, поскольку спринтеры нуждаются в перемещении с большим размахом, и их стойки голени должны быть прочнее для выдерживания более высоких нагрузок, связанных с данным видом занятий спортом. Более широкая или крупная параболическая стойка голени будет изогнута по сравнительно более плоской кривой, которая соответствует большей конструктивной прочности при увеличенном размахе перемещения.
Переходник 13 пилона ножного протеза присоединен к верхнему концу стойки 6 голени крепежными элементами 14. Переходник 13, в свою очередь, прикреплен к нижнему концу пилона 15 ножного протеза крепежными элементами 16. Пилон 15 ножного протеза крепится к нижней конечности ампутанта опорной конструкцией (не показанной), прикрепляемой к культе ноги.
В примерном варианте осуществления участки переднего отдела стопы, среднего отдела стопы и заднего отдела стопы стопного киля 2 выполнены одной деталью из упругого материала. Например, можно применить твердую деталь из материала, пластикового по своей природе, обладающего свойством сохранять форму при отклонении силами реакции опоры. Точнее, стопный киль, а также стойка голени могут быть выполнены из слоистого композиционного материала, содержащего армирующее волокно, ламинированное полимерным материалом матрицы. В частности, для формования стопного киля, а также стойки голени могут быть использованы высокопрочный графит, ламинированный термоотверждающейся эпоксидной смолой или экструдированным пластиком, известным под торговой маркой Delran, или дегазированные полиуретановые сополимеры. Функциональные качества, свойственные данным материалам, позволяют обеспечить высокую прочность при малом весе и минимальной деформации. Слои термоотверждающихся эпоксидных смол наносят под вакуумом в соответствии с отраслевыми стандартами протезирования. Полиуретановые сополимеры можно заливать в негативные формы, а экструдированный пластик можно обрабатывать на станке. Каждый используемый материал обладает своими преимуществами и недостатками. Установлено, что в предпочтительном варианте многослойный композиционный материал для стопного киля и стойки голени может также быть термоформованным многослойным композиционным материалом (препрегом), изготовленным в соответствии с промышленными стандартами, с армирующим волокном и термопластичным полимерным связующим материалом для достижения самых высоких характеристик механического растяжения. Подходящим предлагаемым на рынке композиционным материалом описанного типа является материал CYLON® от фирмы Cytec Fiberite Inc., Havre de Grace, Maryland (шт. Мэриленд). Стойка голени и стопный киль могут также представлять собой упругие металлические элементы, выполненные, например, из пружинной стали, нержавеющей стали, титанового сплава или сплава другого металла.
Все физические свойства упругого материала, имеющие отношение к жесткости, гибкости и прочности, определяются толщиной материала. Более тонкий материал будет изгибаться легче, чем более толстый материал такой же плотности. Используемый материал, а также физические свойства связаны с характеристиками жесткости-гибкости стопного киля и стойки голени протеза. В примерном варианте осуществления на фиг.3-5 стопный киль и стойка голени являются равномерными по толщине или с симметрично распределенной толщиной, но по длине данных компонентов толщина может изменяться, как описано ниже, например, при выполнении областей заднего отдела стопы и переднего отдела стопы тоньше и чувствительнее к изгибу в области среднего отдела стопы.
Чтобы легче придать протезу 1 ступни способность к комбинированным высоким/низким динамическим реакциям, участок 5 среднего отдела стопы выполнен в виде такой продольной арки, что медиальная сторона продольной арки обладает более высокой динамической реакцией, чем латеральная сторона. Для данной цели согласно примеру осуществления медиальная сторона вогнутой поверхности продольной дуги имеет больший радиус, чем латеральная сторона данной поверхности.
Взаимозависимость между значениями медиального и латерального радиусов вогнутой поверхности продольной дуги участка 5 среднего отдела стопы дополнительно определяется, подобно передней и задней нагруженным областям подошвенной поверхности стопного киля 2. Линия T1-T2 на переднем участке 5 на фиг.8 представляет переднюю нагруженную область подошвенной поверхности. Линия P1-P2 представляет заднюю подошвенную нагруженную поверхность. Подошвенные нагруженные поверхности на латеральной стороне стопы представлялись бы расстоянием между T1-P1. Подошвенные нагруженные поверхности на медиальной стороне стопы 2 представляются расстоянием между P2-T2. Расстояния, представленные T1-P1 и P2-T2, определяют величины радиусов, и, в результате, определяется взаимозависимость между высокими/низкими динамическими реакциями, и на нее может влиять схождение или расхождение между двумя данными линиями T1-T2 и P1-P2. В результате, комбинированную высокую/низкую динамическую реакцию можно задавать при проектировании конструкции. Подошвенная нагруженная поверхность T1-T2 переднего отдела стопы может отклоняться всего на 5° от нормали к продольной оси A-A стопного киля для создания упомянутой высокой/низкой динамической реакции, см. фиг.8.
Задний конец 17 участка 4 заднего отдела стопы имеет форму изогнутой вверх дуги, которая реагирует на силы реакции опоры во время удара пятки сжатием для амортизации удара. Пятка, образованная участком 4 заднего отдела стопы, выполнена с заднелатеральным углом 18, который смещен назад и в латеральную сторону от медиального угла 19, чтобы способствовать вывороту наружу заднего отдела стопы в начальной фазе контакта во время шага. Передний конец 20 участка 3 переднего отдела стопы имеет форму изогнутой вверх дуги для имитации тыльного сгибания пальцев человеческой стопы в положении подъема пятки и отталкивания носком в конце фазы стойки на протезе во время шага. Передний отдел стопы и задний отдел стопы снабжены снизу резиновыми или пенопластовыми накладками 63 и 64 в качестве амортизаторов.
Усовершенствованная двухплоскостная подвижность протеза стопы достигается посредством медиального и латерального отверстий 21 и 22 компенсационных пазов, проходящих сквозь участок 3 переднего отдела стопы от тыльной поверхности до подошвенной поверхности данного участка. Компенсационные пазы 23 и 24 продолжаются вперед от соответствующих отверстий к передней кромке участка переднего отдела стопы с образованием медиального, среднего и латерального компенсационных напряженных элементов 25-27, которые обеспечивают усовершенствованную двухплоскостную подвижность принадлежащего стопному килю участка переднего отдела стопы. Отверстия 21 и 22 компенсационных пазов расположены на линии B-B, показанной на фиг.5, в поперечной плоскости, которая продолжается под углом α, равным 35°, к продольной оси A-A стопного киля, при этом медиальное отверстие 21 компенсационного паза смещено вперед по сравнению с латеральным отверстием 22 компенсационного паза.
Угол α между линией B-B и продольной осью A-A на фиг.5 может быть всего 5°, и даже тогда будет обеспечиваться высокая/низкая динамическая реакция. С изменением данного угла α должен также изменяться угол Z линии T1-T2 на фиг.8. В проекции на сагиттальную плоскость отверстия 21 и 22 компенсационных пазов наклонены под углом 45° к поперечной плоскости, причем тыльная сторона отверстий смещена вперед относительно подошвенной стороны. При данном расположении расстояние от съемного крепежного средства 8 до латерального отверстия 22 компенсационного паза короче, чем расстояние от съемного крепежного средства 8 до медиального отверстия 21 компенсационного паза, чтобы вынос пальцев стопы на латеральном участке протеза 1 стопы был короче, чем на медиальном участке, для создания возможности высокой/низкой динамической реакции среднего отдела стопы. Кроме того, расстояние от съемного крепежного средства 8 до латеральной подошвенной несущей поверхности, обозначенной линией T1, короче, чем расстояние от съемного крепежного средства до медиальной подошвенной несущей поверхности, обозначенной линией T2, так что вынос пальцев на латеральном участке стопы 1 протеза короче, чем на медиальном, для создания возможности высокой/низкой динамической реакции среднего отдела стопы.
Передняя часть участка 4 заднего отдела стопы, принадлежащего стопному килю 2, дополнительно содержит отверстие 28 компенсационного паза, проходящее сквозь участок 4 заднего отдела стопы от тыльной поверхности до подошвенной поверхности данного участка. Компенсационный паз 29 продолжается в заднем направлении от отверстия 28 к задней кромке участка заднего отдела стопы с образованием компенсационных напряженных элементов 30 и 31. Данные напряженные элементы обеспечивают усовершенствованную двухплоскостную подвижность участка заднего отдела стопы. В варианте исполнения каждое из отверстий 28, 21 и 22 компенсационных пазов может быть снабжено другим небольшим отверстием 28A, 21A и 22A, см. фиг.8, просверленным сквозь область, смежную с компенсационным пазом, для выполнения функции разгрузочного отверстия. Дополнительное небольшое отверстие перенаправляет действующий волновой спектр и замедляет процесс образования трещин и/или разрушения стопного киля.
На тыльной стороне участок 5 среднего отдела стопы и участок 3 переднего отдела стопы, принадлежащие стопному килю 2, образуют обращенную вверх вогнутую поверхность 32, как показано на фиг.3, чтобы данная поверхность функционально имитировала пятую степень подвижности человеческой стопы. А именно, вогнутая поверхность 32 имеет продольную ось C-C, которая ориентирована под углом β от 5° до 35° к продольной оси A-A стопного киля медиальным направлением впереди по сравнению с латеральным направлением, чтобы обеспечивать пятую степень подвижности во время шага наподобие немного наклонной оси второй - пятой плюсневых костей человеческой стопы.
Значение двухплоскостной подвижности можно оценить в случае, когда ампутант идет по неровной местности или когда спортсмен резко изменяет направление в медиальную или латеральную сторону при опоре на стопу. Вектор силы реакции опоры изменяет направление от сагиттально ориентированного до направления, содержащего компоненту во фронтальной плоскости. Опора будет отталкивать в медиальном направлении, противоположном латеральному толчку стопой. Вследствие этого стойка голени наклоняется в медиальном направлении, и вес прилагается к медиальной конструкции стопного киля. В ответ на данные давления медиальные компенсационные напряженные элементы 25 и 31 стопного киля 2 изгибаются в тыльную сторону (отклоняются назад) и выворачиваются внутрь, а латеральные компенсационные напряженные элементы 27 и 30 изгибаются в подошвенном направлении (отклоняются вниз) и выворачиваются наружу. Данное движение стремится поместить подошвенную поверхность плоско на опору (подошвенная стадия).
В протезе ступни в соответствии с настоящим изобретением можно применить, главным образом, для спринта другой стопный киль 33, см.фиг.6 и 7. Центр тяжести тела в спринте становится ориентированным исключительно в сагиттальной плоскости. Протез стопы не нуждается в наличии низкой динамической реакции. В результате, продольную ось вогнутой поверхности переднего отдела стопы и среднего отдела стопы не требуется ориентировать поворотом наружу под углом 5°-35°, как у стопного киля 2. Продольную ось D-D вогнутой поверхности было бы правильнее ориентировать параллельно фронтальной плоскости, как показано на фиг. 6 и 7. Данная ориентация вынуждает стопу для спринта реагировать только в сагиттальном направлении. Кроме того, отверстия 34 и 35 компенсационных швов на участках переднего отдела стопы и заднего отдела стопы ориентированы по линии E-E, параллельной фронтальной плоскости, т.е. латеральное отверстие 35 сдвинуто вперед для совмещения с медиальным отверстием 34 по линии, параллельной фронтальной плоскости. Передний конец 36 стопного киля 33 также выполнен параллельно фронтальной плоскости. Пяточная область 37 на заднем конце стопного киля также параллельна фронтальной плоскости. Описанные модификации отрицательно влияют на универсальные возможности протеза стопы. Однако его функциональные характеристики становятся направленными на решение конкретной задачи. Другое изменение стопного киля 33 для спринтерского бега имеет место в области пальцев стопы на участке переднего отдела стопы, где угол 15° тыльного изгиба стопного киля 2 увеличен до 25-40° тыльного изгиба стопного киля 33.
На фиг.9 и 10 показан дополнительный стопный киль 38 в соответствии с настоящим изобретением для протеза стопы, особенно полезный для спринтерского бега ампутанту, который подвергнут вычленению стопы Сайма. С упомянутой целью участок среднего отдела стопы, принадлежащий стопному килю 38, содержит заднюю обращенную вверх вогнутую поверхность 39, на которой изогнутый нижний конец стойки стопы крепится к стопному килю съемным крепежным средством. Данный стопный киль могут использовать все ампутанты с ампутацией нижних конечностей. Стопный киль 38 вмещает более длинную культю, соответствующую ампутации типа вычленения стопы Сайма. Его функциональные характеристики делают возможными заметно более скоростные динамические реакции. Данный киль не специализирован для применения при конкретном уровне ампутации. Его можно использовать при всех ампутациях на уровне большеберцовой кости и бедренной кости. Стопный киль 40 согласно примеру осуществления, изображенному на фиг.11 и 12, также имеет вогнутую поверхность 41 для ампутанта с вычленением стопы Сайма, причем данный стопный киль сообщает протезу стопы комбинированную характеристику с высокой и низкой динамическими реакциями, а также возможности двухплоскостного движения, аналогичные возможностям в примере осуществления, изображенном на фиг.3-5 и 8.
Функциональные характеристики нескольких стопных килей для протеза 1 стопы обусловлены особенностями формы и конструкции, поскольку данные характеристики зависят от вогнутых поверхностей, выпуклых поверхностей, величины радиусов, растяжения, сжатия и физических свойств материала, а все упомянутые свойства определяют связь с реакцией на силы опоры во время занятия ходьбой, бегом и прыжками.
Стопный киль 42 на фиг.13 похож на стопный киль согласно примеру осуществления, изображенному на фиг.3-5 и 8, за исключением того, что толщина стопного киля сужается от участка среднего отдела стопы к заднему концу заднего отдела стопы. Толщина стопного киля 43 на фиг.14 постепенно уменьшается или сужается к его обоим, переднему и заднему, концам. Аналогичные изменения толщины показаны у стойки 44 голени на фиг.15 и у стойки 45 голени на фиг.16, которые можно применить в протезе 1 стопы. Каждая конструкция стопного киля и стойки голени формирует разные результирующие функциональные характеристики, поскольку данные результирующие функциональные характеристики связаны с горизонтальными и вертикальными линейными скоростями, которые специально назначают для повышения функциональных характеристик применительно к разным спортивным задачам. Возможность нескольких конфигураций стойки голени и регулировок при установках относительного расположения стопного киля и стойки голени формируют такую взаимозависимость между протезом ступни и стойкой голени, которая дает ампутанту и/или протезисту способность настраивать протез ступни для достижения максимально высоких функциональных характеристик при выполнении намеченного занятия из разнообразных спортивно-оздоровительных занятий.
Другие стойки голени для протеза 1 стопы показаны на фиг.17-22 и включают в себя C-образные стойки 46 и 47 голени, S-образные стойки 48 и 49 голени и J-образные стойки 50 и 51 голени. Верхний конец стойки голени может также содержать прямую вертикальную концевую часть, к проксимальному концу которой крепится пирамидальная крепежная планка. Охватываемую пирамиду можно крепить к упомянутому вертикальному концу стойки голени болтами, проходящими сквозь данный вертикальный конец стойки голени, как показано на фиг.28-30 и 33-36. Другим вариантом осуществления проксимального крепления стойки могут быть задняя и/или передняя стороны приемной муфты ампутанта и/или другие компоненты протеза. В удлиненных отверстиях на проксимальном и дистальном концах стойки голени можно также предусмотреть пластиковые или алюминиевые вкладыши для подгонки под проксимальную охватываемую пирамиду и дистальный стопный киль. Протез стопы в соответствии с настоящим изобретением представляет собой модульную систему, конструктивно выполненную предпочтительно из стандартных узлов или со стандартными размерами для универсального и разнообразного применения. Примерная пирамидальная крепежная планка, прикрепляемая к проксимальной оконечности стойки голени, указана позицией 88 в варианте осуществления, показанном на фиг.28.
Все действия во время бега по беговой дорожке сопровождаются движением в направлении против часовой стрелки. Другой дополнительный признак настоящего изобретения состоит в учете сил, действующих на стопу, перемещаемую вперед вдоль такой кривой траектории. Центростремительное ускорение действует в направлении центра поворота, когда объект движется по криволинейной траектории. К силовому действию применим третий закон Ньютона. А именно, имеет место равная по величине и противоположно направленная реакция. Следовательно, для каждой «центростремительной» силы существует «центробежная» сила. Центростремительная сила действует к центру поворота, а центробежная сила, противодействующая сила, действует от центра поворота. Если спортсмен бежит вдоль замкнутой кривой по беговой дорожке, то центростремительная сила толкает бегуна к центру кривой, а центробежная сила отталкивает от центра кривой. Для противодействия центробежной силе, которая стремится наклонить бегуна наружу, бегун наклоняется внутрь. Если движение бегуна на повороте беговой дорожки всегда является направленным против часовой стрелки, то левая сторона находится внутри беговой дорожки. В результате, в соответствии с признаком настоящего изобретения левую сторону стоек голени у правого и левого протезов ступни можно делать тоньше, чем правую сторону, и можно повысить функциональные характеристики при беге ампутанта по кривой.
Каждый из стопных килей 2, 33, 38, 42 и 43 согласно нескольким вариантам осуществления имеет длину 29 см с пропорциями стопы 1, показанными в масштабе на фиг.3, 4 и 5 и на нескольких видах разных стоек голени и стопных килей. Однако специалисту в данной области техники несложно понять, что конкретные размеры протеза стопы могут изменяться в зависимости от размера, веса и других характеристик ампутанта, носящего стопу. Длина стойки голени и ее модуль упругости формируют ее потенциальные возможности и способность накапливать энергию упругой деформации. Данная накопленная энергия упругой деформации превращается посредством механической конструкции в динамическую мощность, которая обеспечивает направленное усилие с характеристиками направления и величины. Поэтому, чем больше длина стойки, тем больше толкающая сила. Точку проксимального крепления стойки для спортсменов с наивысшими функциональными показателями следует обеспечивать настолько более проксимально, насколько допускают компоненты протеза.
Ниже рассмотрено функционирование протеза 1 стопы в фазовых положениях шаговых циклов при ходьбе и беге. Основу кинематики движения стопы 2 составляют три закона механики Ньютона, которыми являются законы инерции, ускорения и действия-противодействия. Из третьего закона Ньютона, закона действия-противодействия, известно, что опора толкает ступню с силой, равной по величине и противоположной по направлению силе, с которой ступня давит на опору. Упомянутые силы известны под названием сил реакции опоры. Проведено множество научных исследований, касающихся действий человека во время шага, при беге и прыжках. Исследования на силовых пластинах показывают, как третий закон Ньютона действует во время шага. В результате данных исследований авторы определили направление нажима опоры на стопу.
Фазу положений при ходьбе и беге можно дополнительно разбить на фазы торможения и ускорения. Когда протез стопы касается опоры, стопа давит на опору вперед, а опора отталкивает в обратном направлении с равной и противоположно направленной силой, т.е. опора отталкивает протез стопы назад. Данная сила заставляет протез стопы двигаться. Анализ фазы положений при ходьбе и беге начинается с точки контакта, представляющей собой заднелатеральный угол 18, см. фиг. 3 и 8, который смещен назад и в латеральную сторону по сравнению с медиальной стороной ступни. В начале контакта данное смещение вынуждает стопу выворачиваться наружу и стойку голени изгибаться в подошвенную сторону. Стойка голени всегда стремится в положение, в котором вес тела передается через данную стойку, например стойка голени стремится установить свой длинный вертикальный элемент в положение противодействия силам реакции опоры. Именно поэтому стойка перемещается назад - изгибается в подошвенном направлении, чтобы противодействовать силе реакции опоры, которая отталкивает стопу назад.
Силы реакции опоры вынуждают стойки 44, 45, 46, 47, 50 и 51 голени сжиматься, что сопровождается движением назад проксимального конца. В стойках 48, 49 дистальный отдел, составляющий 1/2 от стойки голени, будет сжиматься в зависимости от ориентации дистальных вогнутых поверхностей. Если дистальная вогнутость сжимается в ответ на силы реакции опоры (GRF), то проксимальная вогнутость будет расширяться, и вся стойка голени будет перемещаться в заднем направлении. Силы реакции опоры вынуждают стойку голени сжиматься с перемещением проксимального конца назад. Меньший нижний радиус стойки голени сжимается, имитируя изгиб человеческого голеностопного сустава, и передний отдел стопы опускается при нажиме на опору. В то же время, задняя сторона стопного киля, представленная участком 4 заднего отдела стопы, указанным позицией 17, сжимается вверх вследствие сдавливания. Обе данные сжимающие силы оказывают амортизирующее удар действие. Амортизация удара дополнительно улучшается смещенной назад латеральной пяткой 18, которая вынуждает стопу выворачиваться наружу, что также оказывает амортизирующее удар действие после того, как стойка голени прекратила движение на изгиб в подошвенном направлении, и опора отталкивает стопу в заднем направлении.
Затем сжатые элементы стопного киля и стойки голени начинают разгружаться, а именно они стремятся к своей исходной форме, и накопленная энергия освобождается, что вынуждает проксимальный конец стойки голени двигаться вперед с ускорением. Когда стойка голени достигает своего вертикального начального положения, силы реакции опоры изменяются от нажима назад на нажим на стопу вертикально вверх. Поскольку протез стопы содержит переднюю и заднюю нагружаемые области подошвенной поверхности, и данные области соединены ненагружаемым длинным дугообразным средним участком, то вертикально направленные силы от протеза вынуждают длинный дугообразный средний участок нагружаться путем распрямления. Задняя и передняя нагружаемые поверхности расходятся. Данные вертикально направленные силы накапливаются в длинном дугообразном среднем участке стопы по мере того, как силы реакции опоры перемещаются от естественного вертикального направления к направлению вперед. Стойка голени распрямляется, имитируя тыльное сгибание голеностопного сустава. Это вынуждает протез стопы поворачиваться от передней нагружаемой подошвенной поверхности. По мере того как происходит снятие весовой нагрузки, продольная дуга участка 5 среднего отдела стопы и распрямленная стойка голени изменяются по форме выходом из распрямленного состояния и стремятся к своей первоначальной форме, что вызывает имитацию траекторий и результирующих движений группы мышц-сгибателей подошвы. В результате, механические конструкции протеза высвобождают накопленную энергию упругой деформации в виде динамической мощности.
Длинная дуга стопного киля и стойка голени сопротивляются распрямлению их соответствующих структур. В результате, поступательное движение вперед стойки голени задерживается, и стопа начинает поворачиваться от передней нагружаемой области подошвенной поверхности. Распрямление принадлежащего стопному килю участка среднего отдела стопы обладает способностью к высокой и низкой реакции в случае со стопными килями согласно примерам осуществления, показанным на фиг.3-5 и 8, фиг.11 и 12, фиг.13 и фиг.14. Поскольку переходная область между средним и передним отделами стопы данных стопных килей отклоняется на 15°-35° во внешнюю сторону от длинной оси стопы, то медиальная длинная дуга больше в длину, чем латеральная длинная дуга. Это важно потому, что в нормальной стопе во время ускорения или торможения используют медиальную сторону стопы.
Более длинная медиальная дуга протеза стопы обладает большей характеристикой динамической реакции, чем латеральная дуга. Укороченный латеральный вынос пальцев стопы используют при ходьбе или беге с невысокими скоростями. Центр тяжести тела движется в пространстве по синусоидальной кривой. Он перемещается в медиальном, латеральном, проксимальном и дистальном направлениях. При ходьбе или беге с небольшими скоростями центр тяжести тела совершает более широкие медиальные и латеральные движения, чем при ходьбе или беге с большими скоростями. Кроме того, меньше момент или инерция и меньше способность справляться с более высокой динамической характеристикой. Протез стопы в соответствии с настоящим изобретением выполнен согласно данным принципам прикладной механики.
Кроме того, в среднем положении цикла человеческого шага центр тяжести тела находится в крайней латеральной точке своего движения. При перемещении из среднего положения к точке отрыва носка центр тяжести тела (BCG) перемещается из латерального положения в медиальное положение. В результате, центр тяжести тела переходит латеральную сторону стопного киля 2. Сначала (низкая передача) и по мере того как центр тяжести тела (BCG) двигается вперед, он перемещается в медиальном направлении на стопном киле 2 (высокая передача). Как следствие, стопный киль 2 протеза действует наподобие автоматической коробки передач. То есть он начинает движение на низкой передаче и переходит на высокую передачу при каждом шаге, который делает ампутант.
Поскольку силы реакции опоры толкают вперед протез стопы, который нажимает на опору назад, то, когда начинает подниматься пятка, передний участок длинной дуги участка среднего отдела стопы имеет такой профиль, чтобы прилагать упомянутые направленные назад силы перпендикулярно подошвенной поверхности данного участка. Данный способ является наиболее эффективным и результативным для приложения упомянутых сил. То же самое можно утверждать относительно заднего участка заднего отдела стопы протеза стопы. Он также имеет такую форму, чтобы направленные назад силы реакции опоры в начале контакта были противоположны подошвенной поверхности стопного киля, перпендикулярной направлению приложения упомянутых сил.
На последних стадиях фаз подъема пятки и отталкивания носком при ходьбе и беге область пальцев стопы на участке переднего отдела стопы изогнута в тыльную сторону под углом 15°-35°. Данная вертикально продолжающаяся дуга позволяет направленным вперед силам реакции опоры сжимать данный участок стопы. Сопротивление упомянутому сжатию меньше, чем распрямлению, и происходит плавный переход в фазу свободного маха во время шага и бега на протезе стопы. На последних стадиях фазы стойки на протезе во время шага распрямляемая стойка голени и распрямляемая длинная дуга среднего отдела стопы высвобождают накопленную в них энергию дополнительно к направленному вперед и вверх толчку ведомой конечности и центра тяжести тела ампутанта.
Один из основных движительных механизмов во время шага человека называют активной толчковой фазой. Когда пятка поднимается, вес тела проходит впереди опорной конечности, и центр тяжести падает. Когда вес тела проходит через перекат переднего отдела стопы, показанный на фиг.5 линией C-C, имеет место направленное вниз ускорение, которое дает в результате максимальную вертикальную силу, воспринимаемую телом. Ускорение ноги вперед от голеностопного сустава, сопряженное с подъемом пятки, дает в результате направленный назад сдвиг по отношению к опоре. Когда центр давления перемещается вперед к оси поворота головок плюсневых костей, в результате еще более усиливается момент тыльного изгиба. Тем самым, создается состояние полного падения вперед, которое производит значительное усилие движения вперед, используемое при ходьбе. Признаками эффективного выполнения функции голеностопного сустава во время активного толчка являются подъем пятки, минимальное движение сустава и почти нейтральное положение голеностопного сустава. Устойчивый средний отдел стопы необходим для нормальной последовательности движения при подъеме пятки.
Задняя сторона заднего отдела стопы и участок переднего отдела стопы стопного киля содержат отверстия компенсационных пазов и компенсационные напряженные элементы в нескольких ранее упомянутых вариантах осуществления. При заданной ориентации отверстия компенсационных пазов действуют как косой шарнир, поэтому возможности двухплоскостного движения становятся совершеннее и тем самым повышают общие контактные характеристики подошвенной поверхности стопы при ходьбе по неровной местности.
Показанные на фиг.9-12 стопные кили для ампутантов с вычленением стопы Сайма заметно отличаются по возможностям динамических характеристик, поскольку данные возможности касаются действий при ходьбе, беге и прыжках. Данные стопные кили отличаются по четырем четко выделяющимся признакам. К данным признакам относится исполнение проксимального заднего участка среднего отдела стопы с вогнутой поверхностью для более удобного вмещения дистальной формы культи при вычленении стопы Сайма, чем в случае плоской поверхности. Кроме того, данная вогнутая поверхность уменьшает высоту стопного киля, который вмещает более длинную культю, которая характерна для ампутантов с вычленением стопы Сайма. Установочная вогнутая поверхность нуждается в том, чтобы соответствующие передний и задний радиусы дугообразного среднего участка стопного киля были более заметными и меньшего размера. В результате, становятся круче и меньше все радиусы длинной дуги среднего отдела стопы и радиусы заднего отдела стопы. Это сильно влияет на характеристики динамических реакций. Радиусы меньшего размера производят меньше потенциальной энергии для динамической реакции. Однако протез стопы быстрее реагирует на все вышеупомянутые силы реакции опоры при ходьбе, беге и прыжках. В результате, получается более быстродействующая стопа с меньшей динамической реакцией.
Повышения двигательных показателей спортсмена, выполняющего конкретную задачу, можно добиться изменениями относительного расположения при использовании протеза стопы в соответствии с настоящим изобретением, поскольку упомянутые изменения относительного расположения влияют на вертикальные и горизонтальные составляющие силы и движения для каждой задачи. Человеческая стопа представляет собой универсальный аппарат, который может идти, бежать и прыгать. Напротив, конструкция стойки голени, имитирующей человеческие большеберцовую и малоберцовую кости, не является универсальным аппаратом. Упомянутая конструкция представляет собой простой рычаг, который прилагает свои усилия при осуществлении действий, связанных с ходьбой, бегом и прыжками, параллельно своему длинному проксимально-дистальному направлению. Стойка представляет собой несжимаемую конструкцию и не способна накапливать энергию. С другой стороны, протез стопы в соответствии с настоящим изобретением обладает возможностями динамического реагирования, поскольку данные возможности динамического реагирования связаны с компонентами горизонтальной и вертикальной линейных скоростей движения спортсмена во время ходьбы, бега и прыжков и превосходят по функциональным характеристикам большеберцовую и малоберцовую кости человека. В результате, существует возможность совершенствования функциональных характеристик занимающегося спортом ампутанта. С этой целью в соответствии с настоящим изобретением крепежное средство 8 ослабляют и регулируют относительное расположение стойки голени и стопного киля друг относительно друга в продольном направлении стопного киля. Данное изменение показано в связи с фиг.1 и 2. Затем стойку голени закрепляют к стопному килю в отрегулированном положении крепежным средством 8. В ходе данной регулировки винт крепежного средства 8 сдвигается относительно одного или обоих противоположных, относительно более длинных, продольно удлиненных отверстий 9 и 10 соответственно в стопном киле и стойке голени.
Изменение относительного расположения, которое вызывает повышение функциональной характеристики бегуна, который вступает в начальный контакт с опорой на полную стопу, как спринтер с приземлением на средний отдел стопы, например, состоит в том, что стопный киль сдвигают вперед относительно стойки голени и стопу изгибают в подошвенную сторону на стойке голени. Данное новое относительное расположение усиливает горизонтальную составляющую бега. А именно, когда стойка голени имеет изгиб в подошвенную сторону к стопе и стопа вступает в контакт с опорой при плоском положении стопы в противоположность начальному контакту пяткой, опора сразу же толкает назад стопу, которая нажимает на опору в переднем направлении. Данное воздействие вынуждает стойку голени быстро двигаться вперед (за счет распрямления) и вниз. Силы динамических реакций формируются вследствие распрямления, которое оказывает сопротивление направлению начального движения стойки голени. В результате, стопа поворачивается относительно нагружаемой области подошвенной плюсневой поверхности. Это вынуждает принадлежащий стопному килю участок среднего отдела стопы распрямляться, причем сопротивление данному распрямлению сильнее, чем сжатию. Суммарное действие распрямления стойки голени и распрямления среднего отдела стопы состоит в том, что дальнейшему поступательному движению стойки голени вперед оказывается сопротивление, что позволяет разгибателям колена и разгибателям тазобедренного сустава в теле пользователя перемещать центр тяжести тела в переднем и проксимальном направлении эффективнее (т.е. с повышенной горизонтальной скоростью). В данном случае больше вперед, чем вверх, в отличие от случая с бегуном, двигающимся с пятки на носок, когда поступательному движению стойки голени вперед оказывается меньшее сопротивление из-за того, что стойка голени начинается с большего тыльного (вертикального) сгибания, чем в случае с бегуном, опускающимся на полную стопу.
Для анализа спринтерской стопы в процессе функционирования произведено изменение относительного расположения стойки голени и стопного киля. Преимущества обеспечивает стопный киль, у которого продольные оси всех его вогнутых поверхностей ориентированы параллельно фронтальной плоскости. Стойка голени изогнута в подошвенном направлении и сдвинута назад на стопном киле. Это уменьшает дистальные окружности еще больше, чем у бегуна с опусканием на полную стопу с универсальным стопным килем, аналогичным килю, показанному, например, на фиг.3-5 и 8. В результате, потенциал движения по горизонтали еще выше, и динамическая реакция направлена на совершенствование возможностей данного движения по горизонтали.
Спринтеры характеризуются увеличенными размахом движений, силами и моментами (инерции), причем момент является главным движителем. Поскольку их фаза торможения в фазе стойки на протезе короче, чем их фаза ускорения, достигаются увеличенные горизонтальные линейные скорости. Это означает, что в фазе начального контакта, когда носок касается опоры, опора толкает стопу назад, а стопа нажимает на опору вперед. Стойка голени, которая характеризуется увеличенными силами и моментом, принуждается к еще большему изгибу и направленному вниз перемещению, чем у бегуна с начальным контактом на полную стопу. В результате действия данных сил длинная дугообразная вогнутая поверхность стопы подвергается растяжению, и стойка голени подвергается растяжению. Сопротивление, оказываемое данным силам растяжения, превосходит сопротивление всем остальным ранее упомянутым силам, связанным с бегом. В результате, возможность динамического реагирования стопы пропорциональна приложенной силе. Реакция стойки голени, имитирующей человеческие большеберцовую и малоберцовую кости, лишь связана с энергетическим потенциалом сил, поскольку данная стойка имеет прямолинейную конструкцию и не может накапливать энергию. Упомянутые усилия растяжения в протезе стопы согласно настоящему изобретению при спринтерском беге больше по величине, чем все остальные ранее упомянутые силы, связанные с ходьбой и бегом. В результате, возможность динамического реагирования стопы пропорциональна прилагаемым силам, и поэтому двигательные показатели спортсмена с ампутированной ногой можно повысить в сравнении с функциональными показателями человеческого тела.
Протез 53 стопы, изображенный на фиг.25, напоминает протез на фиг.3 за исключением регулируемого крепежного приспособления между стойкой голени и стопным килем и конструкции верхнего конца стойки голени для соединения с нижним концом пилона ножного протеза. В данном примерном варианте осуществления стопный киль 54 соединен с возможностью регулировки со стойкой 55 голени соединительной деталью 56 из пластика или металлического сплава. Соединительная деталь крепится к стопному килю и стойке голени соответствующими съемными крепежными средствами 57 и 58, которые разнесены друг от друга в соединительной детали в направлении, совпадающем с продольным направлением стопного киля. Крепежное средство 58, присоединяющее соединительную деталь к стойке голени, смещено назад по отношению к крепежному средству 57, соединяющему стопный киль с соединительной деталью. Благодаря увеличению тем самым действующей длины стойки голени повышены возможности динамического реагирования самой стойки голени. Изменения относительного расположения выполняют во взаимодействии с продольно удлиненными отверстиями в стойке голени и стопном киле, как и в других примерах осуществления.
В верхнем конце стойки 55 голени выполнено удлиненное отверстие 59 для вмещения пилона 15 ножного протеза. Вставленный в отверстие пилон ножного протеза можно надежно зажать в стойке голени завертыванием болтов 60 и 61 для стягивания свободных боковин 62 и 63 стойки голени по длине отверстия. Описанное соединение пилона ножного протеза можно легко отрегулировать, для чего ослабляют болты, сдвигают пилон ножного протеза в заданное положение относительно стойки голени и снова зажимают пилон ножного протеза в отрегулированном положении завертыванием болтов.
Протез 70 стопы, показанный на фиг.28-32, аналогичен протезам стопы, представленным на фиг.3-5, 8, 23 и 24 и на фиг.25-27, но дополнительно содержит ограничитель размаха движения стойки голени и амортизирующее устройство 71 на стопе для ограничения протяженности перемещения верхнего конца стойки голени путем приложения и снятия силовой нагрузки на стойку голени во время использования стопы ампутантом. Упомянутый отличительный признак особенно полезен в протезе стопы, содержащем относительно длинную стойку голени, когда пользователь планирует заниматься такими видами, как бег и прыжки, в процессе которых в стойке голени развиваются усилия, во много раз большие, чем вес тела пользователя, например при беге - в 5-7 раз больше веса тела, а при прыжках - в 11-13 раз больше веса тела. Напротив, силы, развиваемые при ходьбе, составляют только 1-11/2 веса тела.
Устройство 71 в примерном варианте осуществления представляет собой поршневой узел двухстороннего действия, в который подаются под давлением текучие среды, газ, например воздух, или гидравлическая жидкость через штуцеры 73 и 74. Устройство содержит два плавных регулятора, один на сжатие и один на выдвижение, которые допускают регулировку допустимой протяженности перемещения верхнего конца стойки 72 голени как при сжатии, так и при распрямлении стойки голени в ходе приложения и снятия нагрузки. Устройство 71 также поглощает энергию, накапливаемую или высвобождаемую во время сжатия и распрямления стойки голени. Противоположные концы поршневого устройства 71 присоединены к верхнему концу стойки голени, нижнему участку стопы и, предпочтительно, в примерном варианте осуществления, к соответствующим концам стойки голени в шарнирных соединениях 75 и 76, которые предпочтительно являются сферическими шарнирами.
Перемещение верхнего конца стойки 72 голени стопы 70 во время сжатия и распрямления стойки голени показано на фиг.32. Стойка голени имеет, в целом, форму такой параболы, что верхний конец стойки голени может перемещаться продольно относительно стопного киля 77, с нижним концом стойки голени, прикрепленным к стопному килю, например, в направлении A-A, показанном на фиг.5 и 32, при сжатии и распрямлении стойки голени во время приложения и снятия нагрузки на стойку голени. Следовательно, в примерном варианте осуществления, показанном на фиг.28-32, сохраняются повышенные характеристики динамических реакций стопы протеза.
Устройство 71 не ограничено вышеописанным поршневым узлом, а может представлять собой другое устройство управления скоростью и/или ограничения перемещения. Например, можно представить, что амортизирующее устройство 71 ограничения предела перемещения назад, применяемое на стойке голени протеза стопы, может представлять собой микропроцессорный гидравлический блок для управления фазами сжатия и распрямления, например блок такого типа, которые в настоящее время применяются для управления движением в искусственных коленных суставах. В данном случае предусмотрены встроенные датчики, которые считывают перемещения человека и настраиваются под них. При использовании специального программного обеспечения и персонального компьютера (PC) можно выполнять точные регулировки гидравлического блока с микропроцессорным управлением для его подстройки под ампутанта. Моменты можно измерять в темпе до 50 раз в секунду, чтобы обеспечивать как можно большую идентичность динамики шага с естественной ходьбой. Благодаря ответным реакциям гидравлического блока он пригоден для самых разных ампутантов без нижних конечностей. Ионно-литиевая батарея, заряженная в устройство, обеспечивает достаточно энергии для работы гидравлического блока в течение полных суток. Сопротивление сжатию регулируется независимо от регулировок распрямления. Несколько встроенных датчиков выдают поток данных для анализа шага во встроенный микропроцессор, который автоматически подстраивает стойку и изменяет характеристики устройства в фазах шага в темпе 50 раз в секунду.
Данный гидравлический блок с микропроцессорным управлением устройства 71 более чувствителен, чем механический гидравлический блок. Электрически управляемый клапан хода сжатия (сгибания в сторону подошвы) производит настройку 50 раз в минуту. Клапан хода сжатия в блоке автоматически полностью открывается в фазе перед шагом. В результате, блок очень легко сжимается при сгибании на низких скоростях, в ограниченном пространстве, и в аналогичных условиях. Скорость серводвигателя блока позволяет ему очень быстро закрывать клапаны хода сжатия (сгибания в сторону подошвы) и хода распрямления с тыльным сгибанием по командам микропроцессора, посылаемым 50 раз в секунду. Когда клапаны почти закрыты, усилие демпфирования блока становится очень большим, что позволяет быстро ходить и даже бежать. Однозначно определяемый коэффициент динамичности, регулируемый протезистом, позволяет оптимизировать гидравлический блок в соответствии с характеристиками всех походок, от медленной до энергичной, с высокими скоростями и быстрыми перемещениями при ходьбе. Данная возможность «настройки» гидравлического блока с микропроцессорным управлением в соответствии с индивидуальной однозначно определенной характеристикой походки позволяет получить широкий диапазон изменения темпов шага в протезе стопы при высокоэффективной и удобной ходьбе. То есть применение микропроцессорного гидравлического блока в качестве устройства 71 совершенствует регулируемый темп шага, необходимый, когда протез стопы применяется активными ампутантами.
Продольно продолжающийся стопный киль 77 протеза 70 стопы, показанного на фиг.28-32, содержит участки переднего отдела стопы, среднего отдела стопы и заднего отдела стопы аналогично стопным килям, показанным на фиг.3 и 25. Стойка 72 голени стопы прикреплена к стопному килю соединительной деталью 78 с двумя продольно разнесенными съемными крепежными средствами 79 и 80, прикрепляющими соединительную деталь соответственно к стойке голени и стопному килю, как в примерном варианте осуществления, показанном на фиг.25-27. Стойка 72 голени содержит продольно продолжающийся компенсационный паз 81 между концами стойки голени. Отверстия 82 и 83 компенсационного паза расположены на концах компенсационного паза. Принадлежащие стопному килю участки переднего отдела стопы и заднего отдела стопы также выполнены с соответствующими компенсационными пазами, как видно из фиг.29, 30 и 31.
Муфта протеза, соединяемая с низом культи ампутанта, крепится к верхнему концу стойки 72 голени через переходник 85, закрепленный на верхнем конце стойки голени крепежными средствами 86 и 87, как показано на чертежах. Переходник содержит крепежный узел 88 в форме перевернутой пирамиды, соединенный с крепежной планкой, закрепленной на верхней поверхности переходника. Пирамидальный узел вмещается имеющим ответную форму гильзовым узлом на зависимой муфте протеза, предназначенным для соединения протеза стопы с муфтой протеза. Соединение данного типа показано в варианте осуществления, представленном на фиг.34-36.
Ограничивающее перемещение и демпфирующее устройство 71 в примерном варианте осуществления, показанном на фиг.28-32, ограничивает протяженность перемещения верхнего конца стойки голени как при сжатии, так и при распрямлении стойки голени, однако можно применить аналогичное устройство, которое ограничивает протяженность перемещения верхнего конца стойки голени только при каком-то одном ходе из ходов сжатия и распрямления. Ограничивающее перемещение и демпфирующее устройство 84, ограничивающее только распрямление верхнего конца стойки голени при приложении и снятии силовой нагрузки, показано в примерном варианте осуществления, представленном на фиг.33. Устройство 84 на данной фигуре представляет собой гибкую ленту, которая допускает ограниченное упругое растяжение и, тем самым, распрямление стойки голени, но не ограничивает перемещение верхнего конца стойки голени во время приложения сжимающей нагрузки на стойку голени. Данное упругое устройство 84 может быть натянуто при его применении, вследствие чего упругое устройство предрасполагает проксимальный конец стойки к перемещению в заднем направлении. Устройство 84 не обязательно должно быть в форме ленты, а может иметь другую форму, например можно применить цилиндрическую пружину или множество цилиндрических пружин в качестве ограничивающего перемещение и демпфирующего устройства, которое допускает ограниченное упругое растяжение и которое накапливает энергию во время приложения силовой нагрузки и высвобождает накопленную энергию при снятии силовой нагрузки во время шага.
На фиг.34-36 представлена стойка 90 голени, выполненная с голеностопным суставом как монолитный упругий элемент, эту стойку голени можно использовать со стопным килем 77 протеза стопы, показанного на фиг.28-32, или с одним из других стопных килей. Стойка 90 голени имеет, в общем, параболическую форму с наименьшим радиусом кривизны стойки на ее нижнем конце и продолжается вверх и первоначально вперед с изменением до относительно больших радиусов на проксимальном конце стойки. Обращенная назад вогнутая поверхность сформирована линией изгиба стойки голени, показанной на фиг.34. Дистальный конец стойки голени содержит продольно продолжающееся отверстие 91, которое вместе с соединительной деталью 78, съемными крепежными средствами 79 и 80 и продольно продолжающимся отверстием в стопном киле допускает регулировку расположения стойки голени и стопного киля друг относительно друга в продольном направлении, когда крепежные средства 79 или 80 ослабляют или разъединяют для настройки функциональных характеристик протеза стопы в соответствии с конкретной задачей.
Дистальный конец стойки 90 голени изогнут более резко, например обладает меньшими радиусами кривизны, чем у стойки 72 голени, показанной на фиг.28-32, и продолжается вверх и вперед на меньшее продольное расстояние. Форма данной стойки голени производит более благоприятное внешнее впечатление. То есть дистальный конец данной стойки точнее расположен в области голеностопного сустава, где обычно должны располагаться медиальная и латеральная лодыжки внешней оболочки протеза стопы, выполненной по форме человеческой стопы. Стойка стопы лучше вкладывается во внешнюю оболочку протеза стопы. Функциональные характеристики стойки позволяют данной стойке быстрее реагировать на силы реакции опоры в фазе начального контакта, но с более жесткой характеристикой динамической реакции, чем в случае со стойкой голени, отличающейся более широкой параболой, например более длинными вышеописанными радиусами кривизны. Таким образом, активные личности, которые занимаются бегом и прыжками на протезе стопы, будут получать преимущество от использования более широкой параболы или радиуса кривизны, которая(ый) дает возможность достигать большей горизонтальной скорости.
Стойка 90 голени, показанная на фиг.34-36, дополнительно содержит центровочное соединительное устройство 92, расположенное между пластиковым или металлическим переходником 93, присоединенным к верхнему концу стойки крепежными средствами 94 и 95, и нижний конец муфты 96 протеза прикреплен к культе пользователя. Пользователь может быть, например, ампутантом с ампутацией ноги выше колена или ниже колена. Центровочное соединительное устройство содержит пару направляющих 97 и 98 скольжения, расположенных под прямыми углами друг к другу, в плоскостях, параллельных опоре. Относительное расположение компонентов каждой направляющей скольжения можно регулировать ослаблением резьбовых крепежных деталей 99 для регулирования соответствующих направляющих 97 и 98 скольжения с изменением относительной ориентации муфты протеза относительно стойки голени и стопного киля протеза стопы. Верх переходника 93, поддерживающего устройство 92, предпочтительно параллелен опоре в фазе шага с протезом стопы.
Верх верхней направляющей 98 скольжения устройства 92 содержит узел 101 в форме перевернутой пирамиды, закрепленной на данной направляющей скольжения, который зажимают с возможностью регулировки в соответствующем крепежном узле 102 на муфте 96 протеза посредством резьбовых крепежных деталей 103. Данное соединение узлов 101 и 102 одного с другим допускает изменение угла - сгибание/распрямление и абдукцию/аддукцию - между муфтой протеза и стопой. Направляющие скольжения устройства 92 допускают медиально-латеральные и передне-задние линейные установочные регулировки. Таким образом, устройство 92 представляет собой центрирующее приспособление, которое допускает перемещение муфты протеза во всех направлениях, что влияет на то, каким образом силы реакции опоры реагируют на воздействия механических конструкций стойки голени и стопного киля.
Стопный киль 110, показанный на фиг.37 и 38, и стопный киль 120, показанный на фиг.39 и 40, представляют собой дополнительные примерные варианты осуществления стопных килей, которые можно применить в протезе стопы в соответствии с настоящим изобретением. Стопные кили предназначены для правой стопы и имеют идентичные конструкции за исключением участка заднего отдела стопы. Медиальная и латеральная стороны двух стопных килей имеют одинаковую форму. В стопном киле 110 выполнен сагиттальный вырез в области заднего отдела стопы с образованием идентичных латеральных и медиальных компенсационных напряженных элементов 111 и 112, разделенных продольно продолжающимся компенсационным пазом или прорезью 113. Пяточная область 114 на заднем конце стопного киля 110 параллельна фронтальной плоскости, например перпендикулярна продольной оси А-А стопного киля. Аналогично, тыльная вогнутая поверхность 115 заднего отдела стопы стопного киля характеризуется собственной продольной осью F-F, направленной параллельно фронтальной плоскости, например, под прямыми углами к продольной оси A-A, т.е. угол Δ равен 90°.
Стопный киль 120, в противоположность стопному килю 110, не содержит сагиттального выреза в области заднего отдела стопы, но содержит собственную тыльную вогнутую поверхность 121 заднего отдела стопы с таким вырезом, что продольная ось F′-F′ вогнутой поверхности поперечно наклонена к фронтальной плоскости, например составляет тупой угол Δ′ с продольной осью A-A, предпочтительно 110-125°, причем латеральная сторона выступает дальше вперед по сравнению с медиальной стороной. Благодаря такой ориентации тыльной вогнутой поверхности латеральный компенсационный напряженный элемент 122 обладает меньшей толщиной вдоль большей длины, чем медиальный компенсационный напряженный элемент 123, и вследствие этого, фактически, имеет большую длину и большую гибкость, чем напряженный элемент 123. Упомянутая большая гибкость делает задний отдел стопы предрасположенным к реагированию на силы реакции опоры в фазе начального контакта выворотом наружу, что служит механизмом амортизации удара. Это способствует эффективной передаче усилий центра тяжести тела через задний отдел стопы стопного киля при походке для обеспечения более нормальной характеристики шага.
Протез 124 стопы, показанный на фиг.41 и 42, содержит стопный киль 165, стойку 126 голени и заднее 125 устройство голени для накопления дополнительной энергии при движении вперед верхнего конца стойки голени во время шага. То есть в активной толчковой фазе шага силовая нагрузка на упругий протез распрямляет расположенную в сагиттальной плоскости вогнутость стойки 126, образованную обращенным вперед выпукло-изогнутым участком 127 стойки голени, что приводит к перемещению вперед верхнего конца стойки голени. Гибкая лента 128 устройства 125 присоединена к верхнему участку стойки голени и нижнему участку стопы протеза, а именно к соединительной детали 129, которая соединяет стойку голени и стопный киль вышеописанным образом. Длина гибкой ленты, которая может быть эластичной и/или не эластичной, натянута во время шага и может регулироваться с помощью скользящего регулировочного приспособления 130, расположенного между соединенных внахлестку участков длины ленты.
Две пружины 131 и 132 регулируемо закреплены их основаниями на верхнем конце стойки голени между стойкой голени и переходником 133, прикрепленным к стойке голени крепежными элементами 134. Нижние свободные концы пружин установлены в положение взаимодействия с гибкой лентой. Когда лента натягивается, пружины изменяют направление продольной протяженности ленты. Перемещение верхнего конца стойки голени во время шага натягивает/дополнительно натягивает (если к ленте предварительно приложена нагрузка натяжения) ленту и нагружает/дополнительно нагружает пружины для накопления энергии при приложении силовой нагрузки на протез стопы во время шага. Данная накопленная энергия возвращается пружинами при снятии силовой нагрузки на протез стопы для повышения динамической мощности толкающей силы, производимой протезом стопы во время шага.
Когда лента 128 укорачивается до первоначальной предварительной нагрузки ленты на натяжение перед применением протеза стопы, натяжение ленты служит для поддержки перемещения назад верхнего конца упругого элемента, а также для регулирования перемещения вперед стойки голени при пользовании протезом. Поддержка перемещения назад может быть полезной для обеспечения быстрой реакции плоской стопы протеза стопы в момент удара пяткой в начальной фазе во время шага аналогично тому, что происходит в стопе и голеностопном суставе человека во время шага при ударе пяткой, когда имеет место подошвенное сгибание стопы.
Как усиленное перемещение назад верхнего конца упругой стойки голени, так и регулируемое перемещение вперед верхнего конца упругой стойки голени при применении протеза с задним устройством 125 голени позволяют эффективно изменять коэффициент трансформации голеностопных крутящих моментов протеза стопы во время шага путем воздействия на изменение характеристики изгиба в сагиттальной плоскости, определяющей продольное перемещение верхнего конца стойки голени, в ответ на приложение и снятие силовой нагрузки при применении пользователем протеза стопы. По ранее опубликованным данным естественный физиологический коэффициент трансформации голеностопных крутящих моментов в стопе человека во время шага, определяемый как результат деления максимального голеностопного момента тыльного изгиба, который возникает в конечный момент стойки на протезе во время шага, на голеностопный момент подошвенного изгиба, создаваемый в момент начальной реакции на нагрузку плоской ступни после удара пяткой во время шага, составляет 11,33 к 1. Целью изменения характеристики изгиба в сагиттальной плоскости, определяющей продольное перемещение верхнего конца стойки голени с задним устройством 125 голени, является увеличение коэффициента трансформации голеностопных крутящих моментов протеза для имитации коэффициента, который возникает в человеческой стопе во время шага. Упомянутая цель важна для обеспечения правильной походки на протезе и, для лиц с одной естественной стопой и одной стопой протеза, для обеспечения симметричной походки. В предпочтительном варианте, путем регулирования перемещения вперед и, возможно, поддержки движения назад с помощью заднего устройства 125 голени, коэффициент трансформации голеностопных крутящих моментов протеза увеличивают настолько, что упомянутый максимальный голеностопный момент тыльного изгиба, который возникает в протезе, на порядок больше, чем упомянутый голеностопный момент подошвенного изгиба в этом же протезе. В более предпочтительном варианте коэффициент трансформации голеностопных крутящих моментов увеличивается до величины около 11:1, что сравнимо с известным по публикациям естественным коэффициентом трансформации голеностопных крутящих моментов 11,33:1.
Дополнительной целью заднего устройства голени является повышение эффективности протеза стопы во время шага посредством накопления в пружинах 131 и 132 устройства дополнительной энергии упругой деформации во время приложения силовой нагрузки к протезу и возвращения накопленной энергии упругой деформации во время снятия силовой нагрузки для повышения динамической мощности толкающей силы, производимой протезом стопы во время шага. Можно считать, что устройство 125 выполняет в протезе стопы такую же функцию, которую выполняет мускулатура голени в человеческой стопе, голеностопном суставе и голени человека во время шага, а именно эффективно порождает толкающую силу, действующую на тело человека во время шага, с использованием потенциальной энергии, производимой в теле во время приложения силовой нагрузки на стопу, и преобразованием данной потенциальной энергии в кинетическую энергию для создания толкающей силы во время снятия силовой нагрузки со стопы. Достижение или даже превышение показателей эффективности человеческой стопы в протезе стопы в соответствии с настоящим изобретением с задним устройством голени является важным, например, для восстановления «нормального функционирования» ампутанта.
Управление перемещением вперед верхнего конца стойки 126 голени посредством заднего устройства 125 голени помогает ограничить предел перемещения вперед верхнего конца стойки голени, как в предыдущих вариантах осуществления, показанных на фиг.28-33. Стопный киль в протезе 124 стопы, при распрямлении его упругой продольной дуги, также вносит вклад в накопление энергии во время приложения силовой нагрузки во время шага. Данная потенциальная энергия возвращается в виде кинетической энергии для создания толкающей силы во время снятия нагрузки во время шага. В данном варианте осуществления комбинированная характеристика высокой/низкой динамической реакции обеспечивается в результате того, что принадлежащий стопному килю участок среднего отдела стопы выполнен в виде продольной дуги, отличающейся на медиальной стороне большим радиусом и относительно более высокой характеристикой динамической реакции, чем на латеральной стороне дуги, как изложено выше в связи с вариантами осуществления, показанными на фиг.3-5 и 8. Однако стопный киль для спринта, типа показанного на фиг.6 и 7, или стопный киль для ампутантов с вычленением стопы Сайма, описанный со ссылками на фиг.9 и 10, можно применять в протезе 124 стопы.
Протез 135 стопы, показанный на фиг.43-45, содержит заднее устройство 136 голени, аналогичное устройству в варианте осуществления, показанном на фиг.41 и 42, за тем исключением, что гибкая лента 137 регулируемой длины закреплена между верхним концом стойки голени и передним концом стопного киля при помощи соединительного троса 138. Концы троса 138 присоединены к соответствующим концам медиального и латерального передних напряженных элементов 139 и 140, разделенных компенсационным пазом 141. Трос продолжается назад и затем вверх через шкивы 142 и 143, установленные на соединительной детали 144, к полукруглому оборотному элементу 145, прикрепленному к дистальному концу ленты 137. Упругая дуга стопного киля, а также пружина 146, закрепленная на верхнем конце стойки голени и соединяющаяся с лентой, как в варианте осуществления, показанном на фиг.41 и 42, применены для накопления и возврата энергии для увеличения толкающей силы, развиваемой протезом ступни во время шага вышеописанным образом.
Переходник 133 на фиг.43 является охватываемым пирамидальным переходником, тогда как переходник на фиг.41 и 42 является охватывающим переходником по настоящему изобретению, содержащим квадратное гнездо со скругленными углами на его проксимальном конце для вмещения с зазором квадратного выступа ответной формы на приемной муфте на нижней конечности или другого компонента на культе ампутанта. См. пунктирные линии на фиг.41. Четыре винта, не указанные позициями, по одному в середине каждой боковой стенки квадратного гнезда, можно ввертывать до и из зацепления с выступом для присоединения протеза к опорной конструкции на культе ампутанта. Зазор между выступом и гнездом и возможность регулировки местоположения четырех винтов охватывающего переходника обеспечивают возможность передне-задней и медиально-латеральной регулировки, а также регулировки угла или наклона протеза относительно опорной конструкции. В соответствии с дополнительным признаком охватывающего переходника резьбовая крепежная деталь соединяет с возможностью разъема верхний, содержащий гнездо, элемент переходника с несущей поверхностью переходника. Верх резьбовой крепежной детали, открытый для доступа в нижней поверхности гнезда переходника, содержит шестигранное углубление для вмещения шестигранного ключа, чтобы можно было отпускать элемент, содержащий гнездо переходника на несущей поверхности, для того, чтобы упомянутый элемент можно было поворачивать относительно несущей поверхности и протеза. Таким образом, переходник обеспечивает возможность поворота в поперечной плоскости; т.е. отличительный признак, который позволяет легче сводить внутрь и разводить наружу стопу в необходимых пределах, например в пределах 1/8 дюйма.
Протез, который имеет более высокие функциональные характеристики и развивает более высокую динамическую мощность в сагиттальной плоскости голеностопного сустава во время шага, достигающую мощности нормального человеческого голеностопного сустава, получен путем использования дополнительного отличительного признака настоящего изобретения, в соответствии с которым предлагается искусственная мышца на, по меньшей мере, чем-то одном из стопы, голеностопного сустава и стойки протеза. Искусственная мышца накапливает энергию во время приложения силовой нагрузки на протез в активной толчковой фазе шага пользователя и на последних этапах фазы положения во время шага высвобождает накопленную энергию для усиления толчка ведомой конечности и тела пользователя. Искусственная мышца предпочтительно выполнена из вязкоупругого материала, например резины или полимера, или композита, содержащего вязкоупругий материал. Можно применить гибридную конструкцию, объединяющую вязкоупругий материал и механический элемент или элементы для образования искусственной мышцы. Полезным высокоэластичным биологическим материалом, который можно применить, является резилин. Цель изобретения состоит в том, чтобы искусственная мышца или мышцы, предусмотренные на протезе в соответствии с изобретением, повышали динамическую мощность в сагиттальной плоскости голеностопного сустава во время шага на протезе до, по меньшей мере, нормальной динамической мощности в сагиттальной плоскости человеческого голеностопного сустава во время шага.
Искусственная мышца может представлять собой сплошную эластичную ленту, например, такую, как указанная позицией 170 на фиг.50, где мышца размещена на стопном киле 171 протеза в соответствии с настоящим изобретением. В качестве альтернативы, можно применить несколько слоев лент, аналогичных тем, которые указаны позициями 172, 172 на фиг.49, для формирования искусственной мышцы 173. Мышца 173 размещена на оболочке 174 стопы протеза в соответствии с настоящим изобретением. Материалы и/или эластичные свойства соответствующих лент могут быть разными. Искусственные мышцы в примерных вариантах осуществления являются пассивными материалами, но предполагается, что можно применить активные искусственные мышцы, например искусственные мышцы на основе электроактивных полимеров. При использовании для копирования функции задней группы мышц голени во время шага искусственная мышца в примерных вариантах осуществления расположена непрерывно с проксимально-дистальной ориентацией. Искусственная мышца на стопе имеет передне-заднюю ориентацию. Однако аналогично стопе человека искусственные мышцы могут также иметь медиально-латеральную ориентацию и другие ориентации или сочетать разные ориентации.
Характеристики формы и масса вязкоупругой искусственной мышцы диктует конкретные характеристики движения. В случае пассивных искусственных мышц в примерных вариантах осуществления масса мышцы, отражаемая произведением площади поперечного сечения мышцы на ее длину, определяет ее возможную мощность. Искусственная мышца большей массы будет иметь более высокую возможную мощность, чем мышца меньшей массы. Две искусственные мышцы 180 и 181 равной массы схематично показаны на фиг.48A и 48B, где каждая мышца изображена с площадью поперечного сечения 12 квадратных единиц, обозначенных номерами 1-12 на чертежах. Искусственная мышца 180 на фиг.48A характеризуется длинным и узким поперечным сечением ленты с равномерным распределением площади поперечного сечения по его длине. Мышца 181 на фиг.48B короче и характеризуется более широким сечением в середине между концами мышцы. Для данного вязкоупругого материала длинная искусственная мышца 180 с узким поперечным сечением будет обладать большим диапазоном перемещения по сравнению с менее длинной искусственной мышцей 181 с большей площадью поперечного сечения. Искусственная мышца 181 с большей площадью поперечного сечения и меньшей длиной создает более высокие значения натяжения при данном продольном растяжении за меньший временной интервал, чем длинная узкая искусственная мышца 180 такой же массы. Описанные характеристики мышцы 181 предпочтительнее для искусственной мышцы, размещаемой на протезе в соответствии с настоящим изобретением, для как можно более точного копирования функциональных характеристик человеческой стопы, голеностопного сустава и голени при ходьбе.
Искусственные мышцы разной формы можно размещать слоями одну поверх другой для получения, в результате, разных перемещений. Каждое результирующее перемещение обладает характеристиками натяжения при перемещении, снятия нагрузки и временного интервала. Путем изменения плотности и твердости вязкоупругих материалов искусственной мышцы можно дополнительно регулировать упомянутые характеристики. Пример многослойной искусственной мышцы 190 со слоями 190A и 190B показан на фиг.51, где проксимальный и дистальный концы искусственной мышцы прикреплены к стойке 191 голени в соответствии с настоящим изобретением на верхнем и нижнем концах стойки голени. Крепление на нижнем конце стойки голени расположено на или вблизи соединительной детали 192 протеза, которая соединяет, как описано выше, стойку голени с не показанным на чертеже стопным килем. Концы искусственной мышцы можно прикреплять к протезу зажимом их между стыкуемыми элементами не показанного на чертеже крепежного приспособления с регулируемой длиной, которые соединены болтами с возможностью разъема. Между концами искусственной мышцы и протезом можно также использовать крепежное приспособление с соединением «ласточкин хвост» или другого типа.
Слои 190A и 190B искусственной мышцы 190 на фиг.51 совместно образуют слоистую конструкцию, которая имеет площадь поперечного сечения, более широкую на среднем участке по длине мышцы, как показано на виде поперечного сечения вдоль продольной оси на фиг.51, для увеличения значений натяжения и сокращения времени реакции, как изложено выше. Примеры искусственных мышц других форм с упомянутыми аналогичными благоприятными отличительными признаками указаны позициями 220-224 на фиг.47A-47E. Искусственные мышцы 222 и 224 снабжены двуперистыми вырезами 222A и 224A. Упомянутые вырезы позволяют создавать большее относительное удлинение мышцы перед натяжением искусственной мышцы под силовой нагрузкой. Четыре дополнительных конфигурации искусственных мышц для применения в протезе в соответствии с настоящим изобретением указаны позициями 150, 151, 152 и 153 на фиг.46A-46D. Искусственная мышца 150 на фиг.46A выполнена с центральным вязкоупругим шариком 154, который охвачен по кругу множеством тросов 155, эластичных или неэластичных, которые проходят по дуге 180° вокруг шарика между верхним и нижним тяжами 156 и 157 мышцы. Натяжение искусственной мышцы в направлении ее продольной оси вызывает эластичное сжатие шарика для накопления энергии.
Искусственная мышца 151 на фиг.46B выполнена с множеством цилиндрических отрезков 158 из вязкоупругого материала, концы которых прикреплены к опорным пластинам 159 и 160. Отрезки переплетены, как показано на фиг.46B. Конфигурация 152 на фиг.46C аналогична конфигурации на фиг.46B за исключением того, что цилиндрические отрезки 158 не переплетены, а параллельны и охвачены кольцом из вязкоупругого материала 161, которое упруго растягивается, когда мышца удлиняется в направлении ее продольной оси при натяжении. Цилиндрические отрезки 162 на фиг.46D параллельны и проходят между общими опорными пластинами 163 и 164 и прикреплены к ним.
Оболочка стопы 174 на фиг.49 выполнена из упругого материала, например пластика или полиуретана. Оболочка стопы выполнена с возможностью плотного охвата, по меньшей мере, нижней оконечности протеза в соответствии с настоящим изобретением для создания видимости человеческой стопы, для подкладки и защиты протеза от атмосферных воздействий. Искусственная мышца 173 на оболочке протеза закреплена своими концами к оболочке протеза для соединения заднего и переднего участков подошвы оболочки протеза. Сгибание корпуса стопы/оболочки стопы во время шага натягивает искусственную мышцу с накоплением энергии, которая высвобождается позже во время шага для поддержки эффекта отсутствия потока воздуха и выталкивания вперед стопы и конечности человека. Аналогичный результат получают посредством искусственной мышцы 170, которая прикреплена концами к переднему и заднему концам стопного киля 171 протеза в соответствии с настоящим изобретением, показанного на фиг.50. Искусственная мышца 190 на стойке 191 голени на фиг.51 натягивается перемещением вперед верхнего конца стойки голени во время шага для сохранения и высвобождения энергии, как изложено в связи с задними устройствами голени, показанными на фиг.33 и 41-45.
Потенциальная энергия протеза с, по меньшей мере, одной искусственной мышцей в соответствии с настоящим изобретением может быть дополнительно увеличена для повышения кинетической энергии и динамической мощности в сагиттальной плоскости голеностопного сустава во время шага протеза посредством предварительной нагрузки искусственной мышцы на растяжение. Это может быть выполнено пользователем протеза в соответствии с настоящим изобретением с помощью прокладки, кулачка или камеры, вмещающей сжатый воздух или другую текучую среду, или путем объединения упомянутых устройств. На фиг.52A-52D показаны четыре прокладки 230-233 разных размеров. Выбранную прокладку можно поместить между конструкцией протеза и его искусственной мышцей для натяжения искусственной мышцы на величину, пропорциональную размеру прокладки. Например, когда искусственная мышца устроена на задней стороне стойки голени протеза, как показано на фиг.51, но без кулачка, изображенного в конфигурации на данной фигуре, прокладку можно было бы поместить между стойкой голени и мышцей.
Кулачок 192, показанный на фиг.51, установлен с возможностью поворота на цилиндрической оси 193, закрепленной на опорной конструкции 194 кулачка, зависимой от ее закрепления на верхнем конце стойки голени, спереди от искусственной мышцы 190. Система 195 с пневмоцилиндром, гидроцилиндром и/или электроприводом (электромагнитом) регулируемо поворачивает кулачок вокруг оси 193 для натяжения мышцы. Упомянутая система на цилиндрах (электромагните) включается перемещением, производимым в стойке голени во время физической активности пользователя в среднем положении фазы положений во время шага. Когда пользователь прикладывает силовую нагрузку на протез, дистальный конец стойки голени приходит в контакт с толкателем 196 нижнего цилиндра (электромагнита), что вынуждает толкатель верхнего цилиндра (электромагнита) входить в контакт с кулачком. В ходе исполнения действия направленная вперед сила увеличивается, давление на нижний цилиндр пропорционально усиливается, что пропорционально продвигает в контакт верхний цилиндр, который вынуждает кулачок 192 входить в контакт с мышцей с развитием пропорциональной предварительной нагрузки искусственной мышцы на растяжение. Возрастание и/или снижение силовой нагрузки аналогично сказывается на натяжении искусственной мышцы. Таким образом, направленная вперед переменная нагрузка на стопный киль обуславливает переменное натяжение искусственной мышцы, и результирующие перемещения протеза изменяются в зависимости от вида активности пользователя. В видоизменении данного варианта осуществления вместо электромагнита для привода кулачка 192 применимо устройство с червячной передачей или простым винтом для регулировки кулачка и натяжения мышцы в зависимости от измеренной силы.
Камера 210 на фиг.54, вмещающая сжатую текучую среду или воздух, установлена на приемной муфте 211 культи. Камера расположена между искусственной мышцей 213, показанной на фиг.53, которая продолжается между приемной муфтой и протезом в соответствии с изобретением и прикреплена к ним, как показано на фиг.53. Пользователь может изменять давление текучей среды в камере клапаном 214 для регулируемой предварительной нагрузки мышцы на растяжение перед занятием спортом для оптимизации функциональных характеристик протеза. В видоизменении данного варианта осуществления проксимальный конец искусственной мышцы может крепиться к проксимальному концу подколенной муфты или к корпусу протеза искусственного колена. В дополнительном видоизменении варианта осуществления искусственную мышцу крепят с проксимальной стороны к колену человека или протезу колена. В данном последнем видоизменении искусственная мышца будет воздействовать на два сустава, коленный и голеностопный.
Здесь описание примерных вариантов осуществления завершается. Хотя настоящее изобретение описано со ссылками на ряд наглядных вариантов осуществления, следует понимать, что специалисты в данной области техники смогут создать множество других модификаций и вариантов осуществления, которые не будут выходить за пределы существа и объема принципов настоящего изобретения. Например, нижний конец стойки голени протеза стопы согласно настоящему изобретению не ограничен формой параболы или, по существу, параболической формой, но может быть выполнен по другой криволинейной форме, выпуклой вниз для получения заданного результирующего перемещения стопы, при креплении к стопному килю для создания области голеностопного сустава стопы. Отличительные признаки разных вариантов осуществления можно также использовать в сочетании друг с другом. В частности, возможны обоснованные изменения и модификации составных частей и/или схем расположения в системе с комбинацией признаков в пределах объема вышеприведенных описания и чертежей и прилагаемой формулы изобретения без выхода за пределы существа изобретения. В дополнение к изменениям и модификациям составных частей и/или схем расположения специалистам в данной области техники будут также очевидны альтернативные применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2345736C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2291676C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2289362C2 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2345737C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ | 2002 |
|
RU2294177C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2305516C2 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ И УСОВЕРШЕНСТВОВАННОЙ АМОРТИЗАЦИЕЙ ВЕРТИКАЛЬНОЙ НАГРУЗКИ И УДАРА | 2003 |
|
RU2308910C2 |
| ПРОТЕЗНАЯ СТОПА | 2005 |
|
RU2359642C2 |
| ПРОТЕЗ СТОПЫ | 2001 |
|
RU2286749C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2005 |
|
RU2346670C2 |
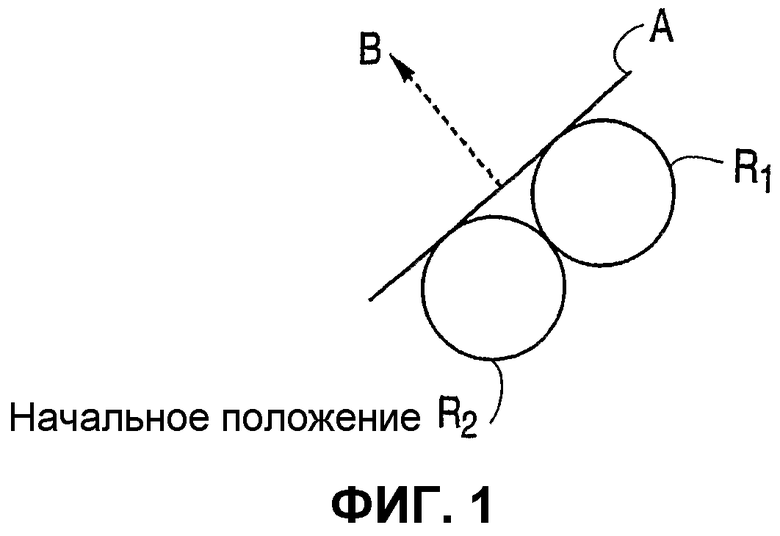
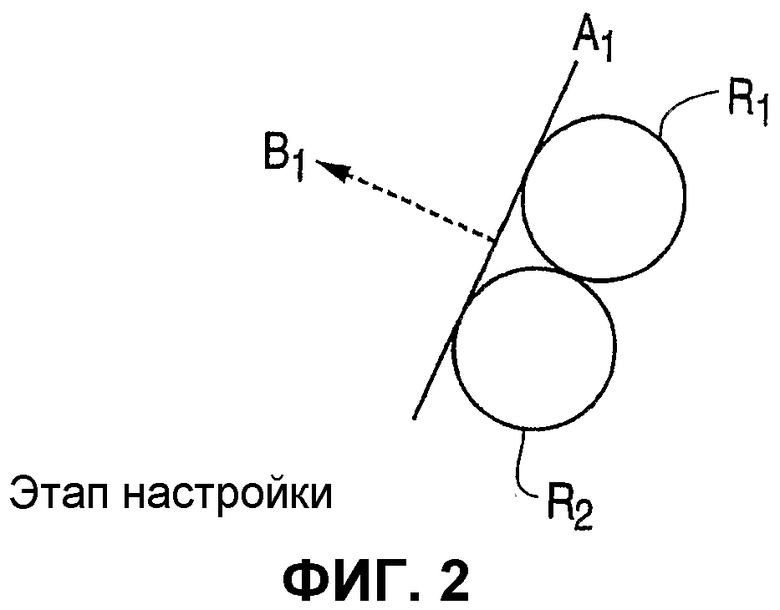
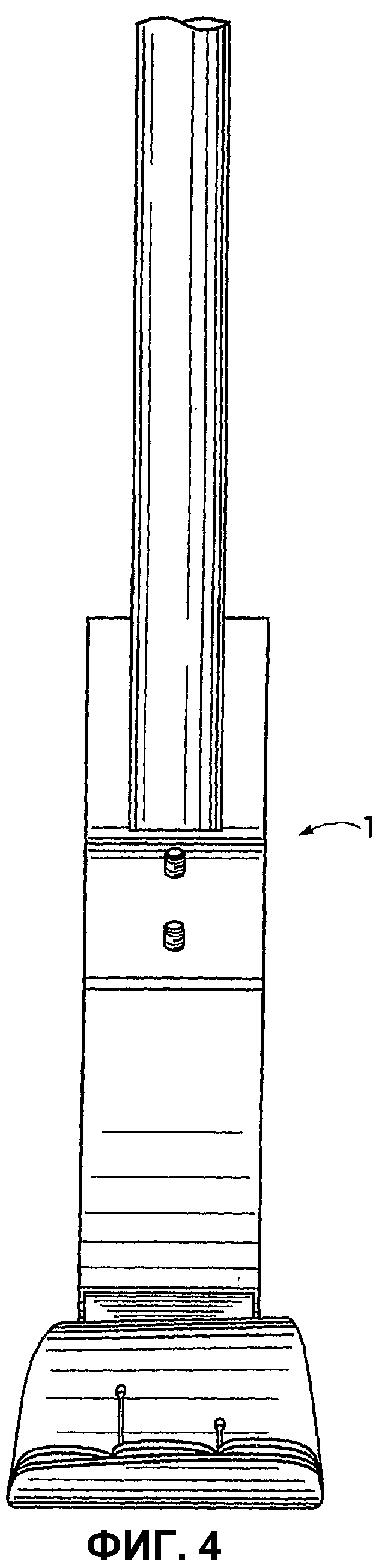
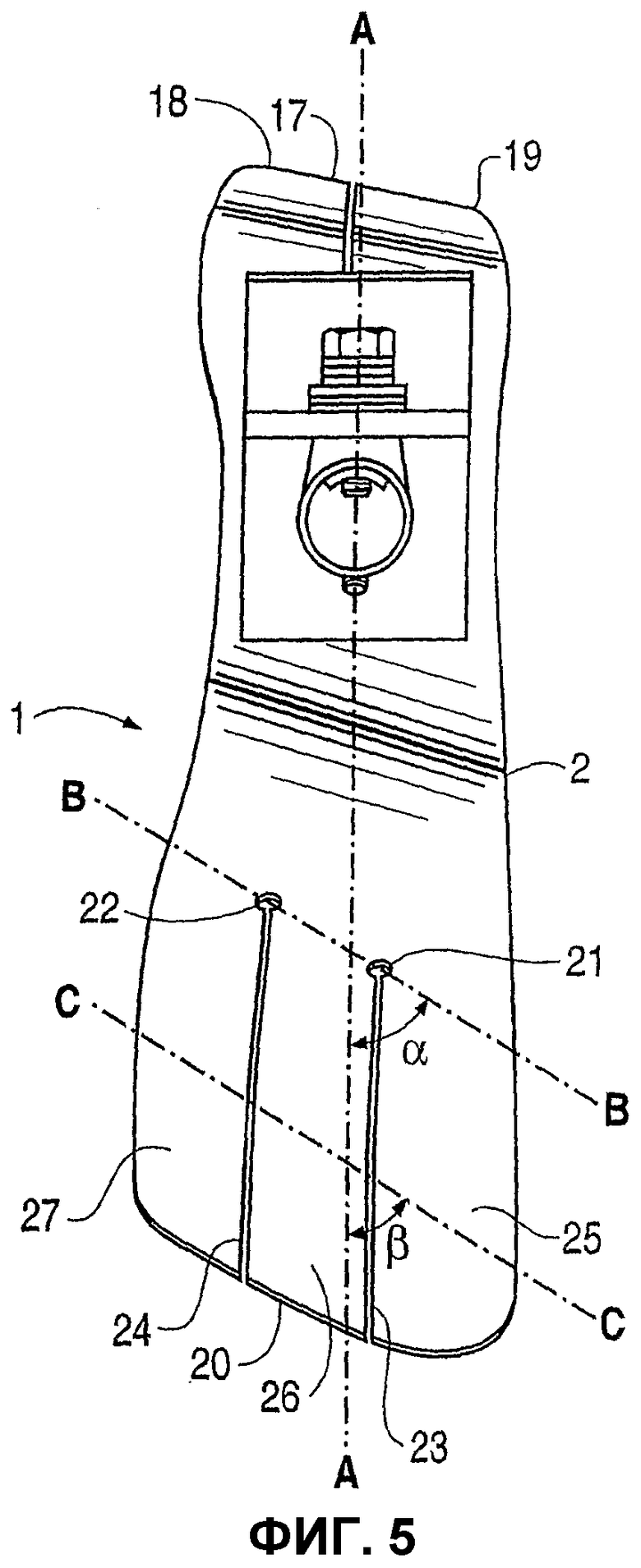
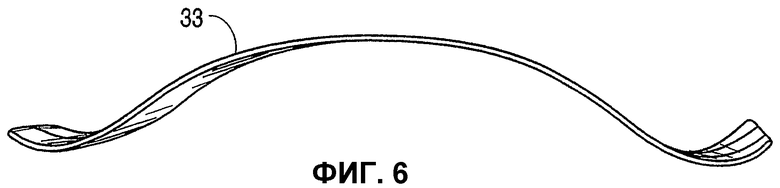
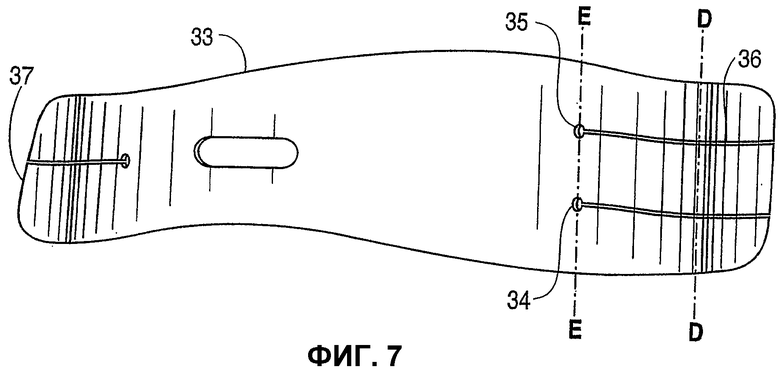
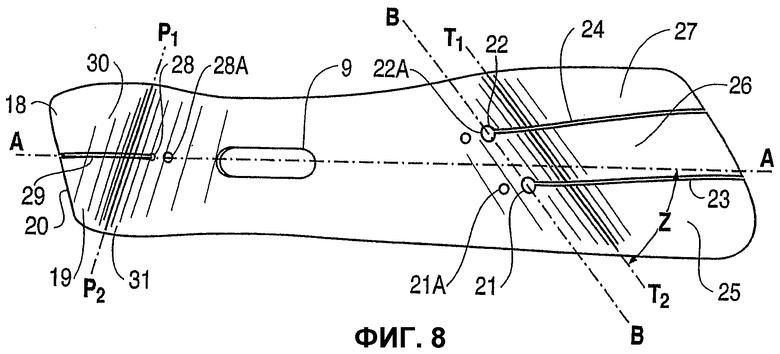
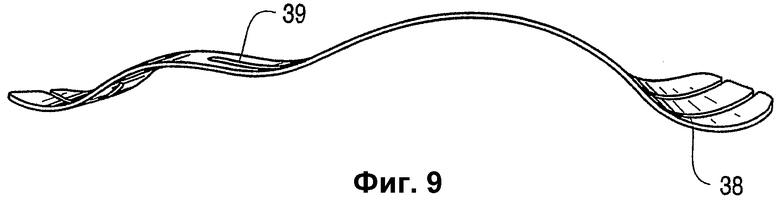
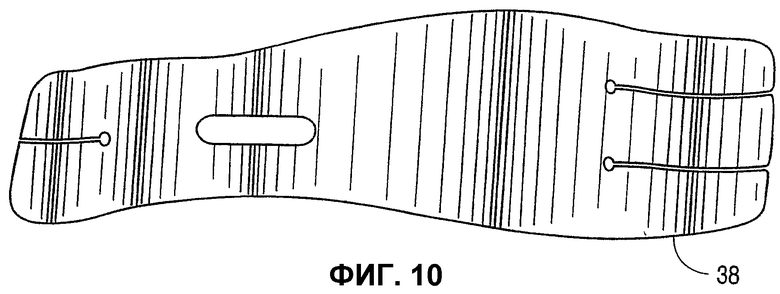
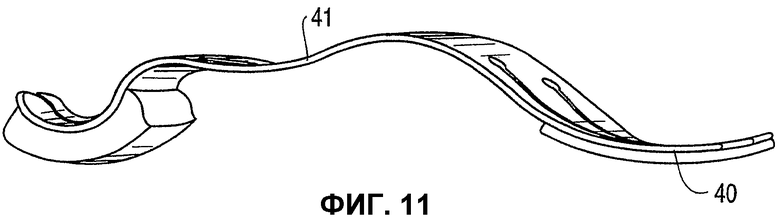
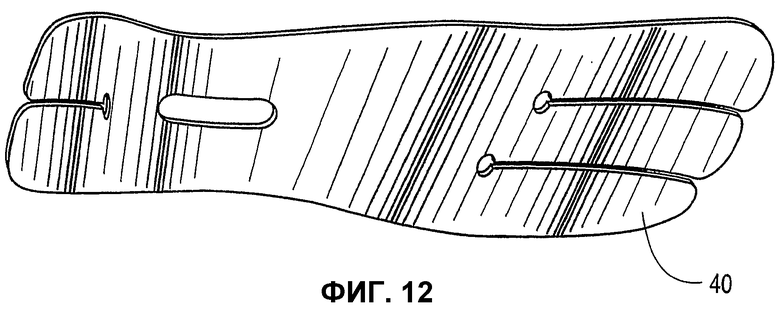
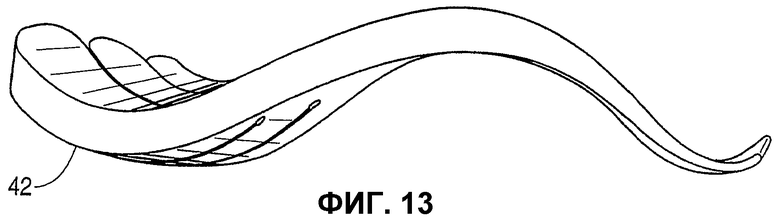
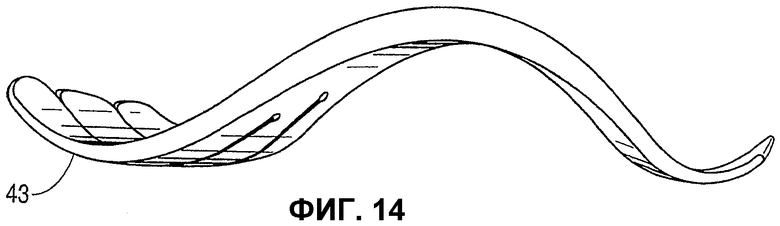
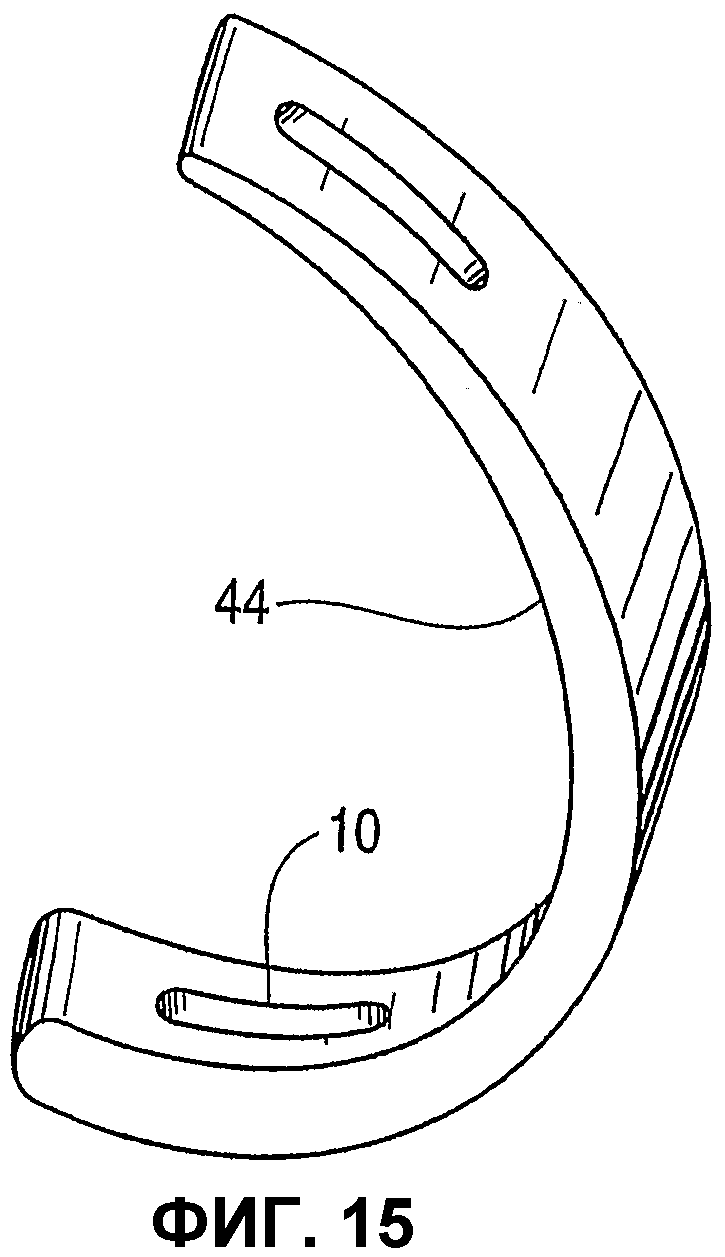
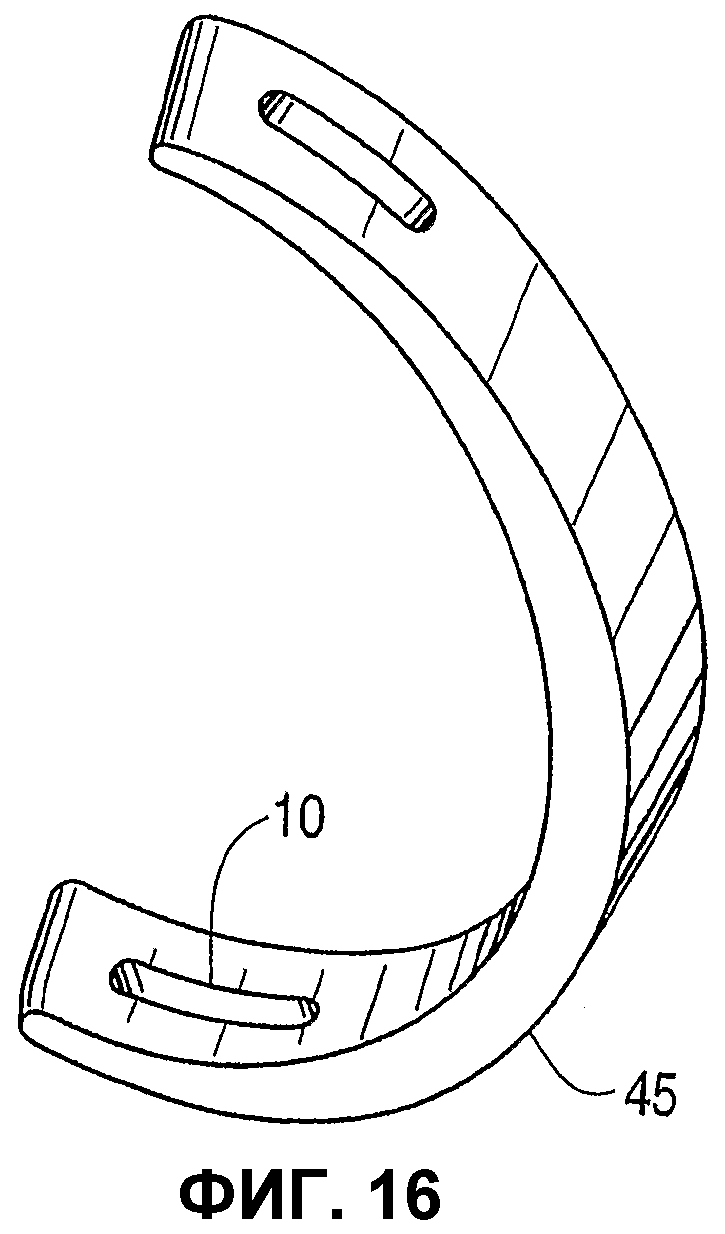
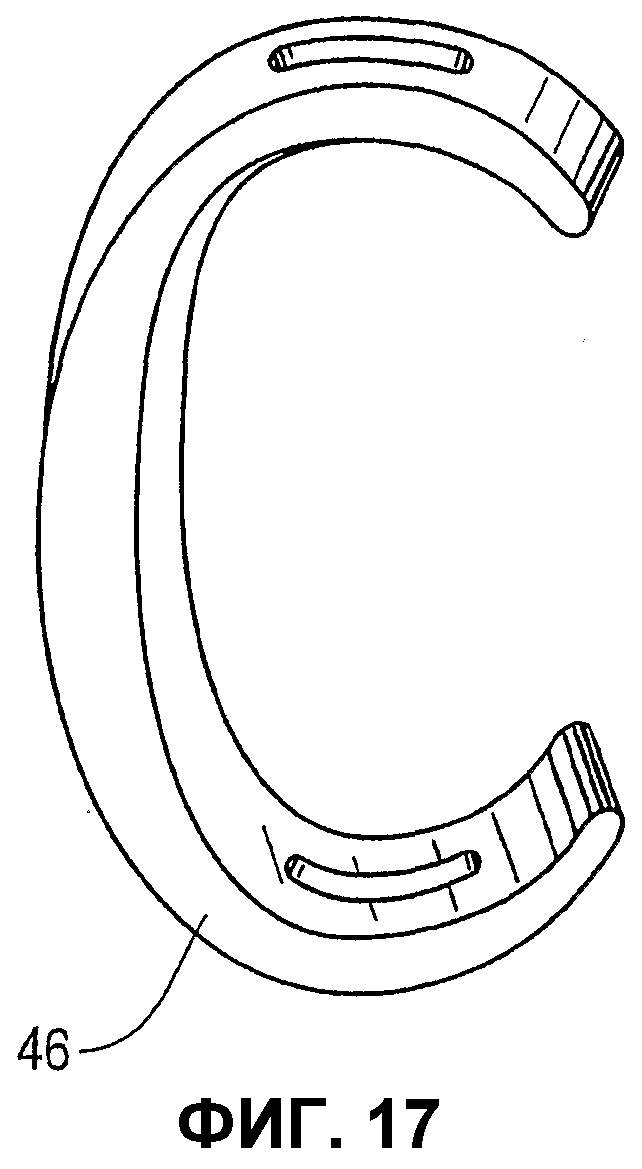
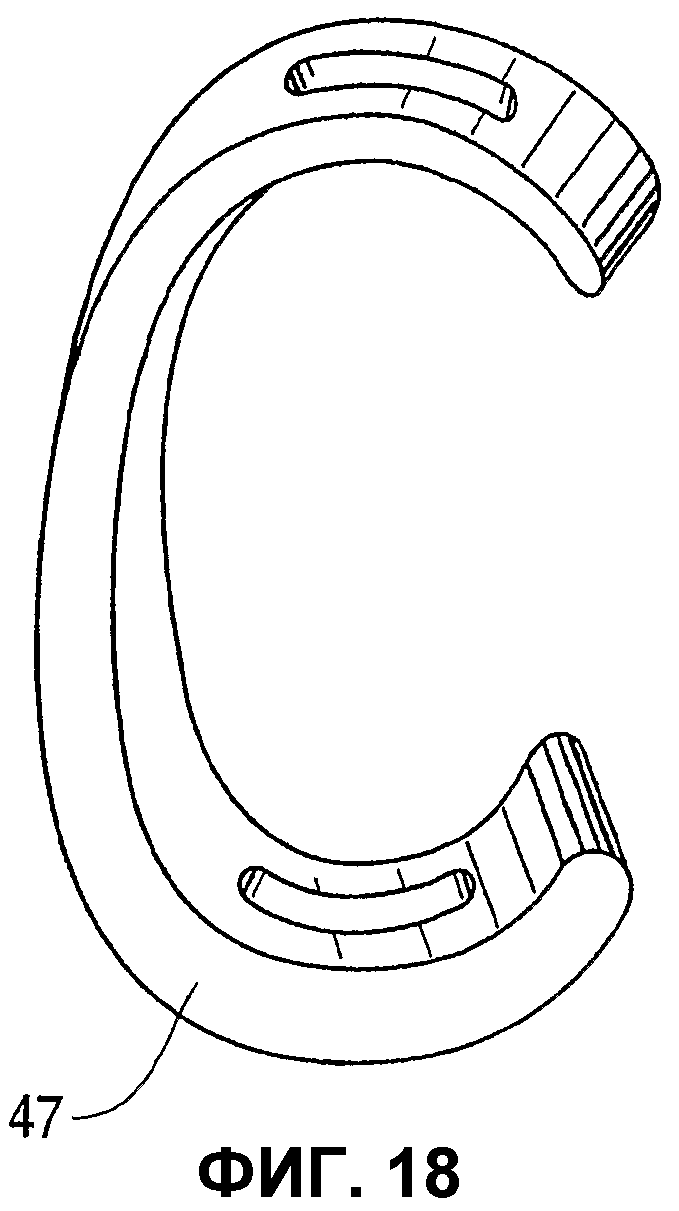
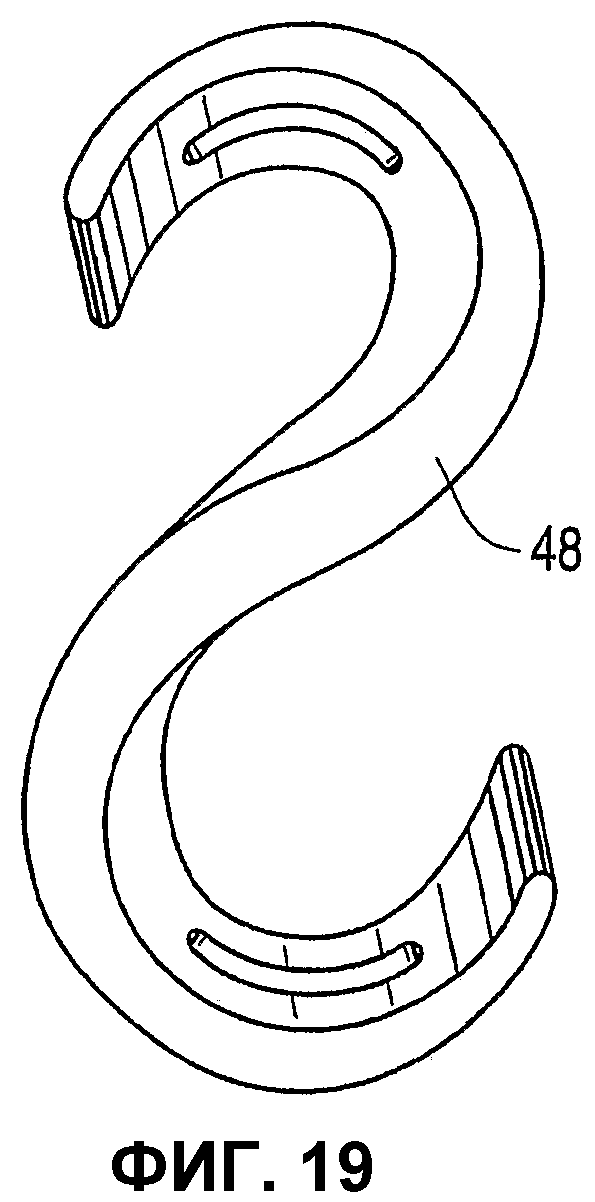
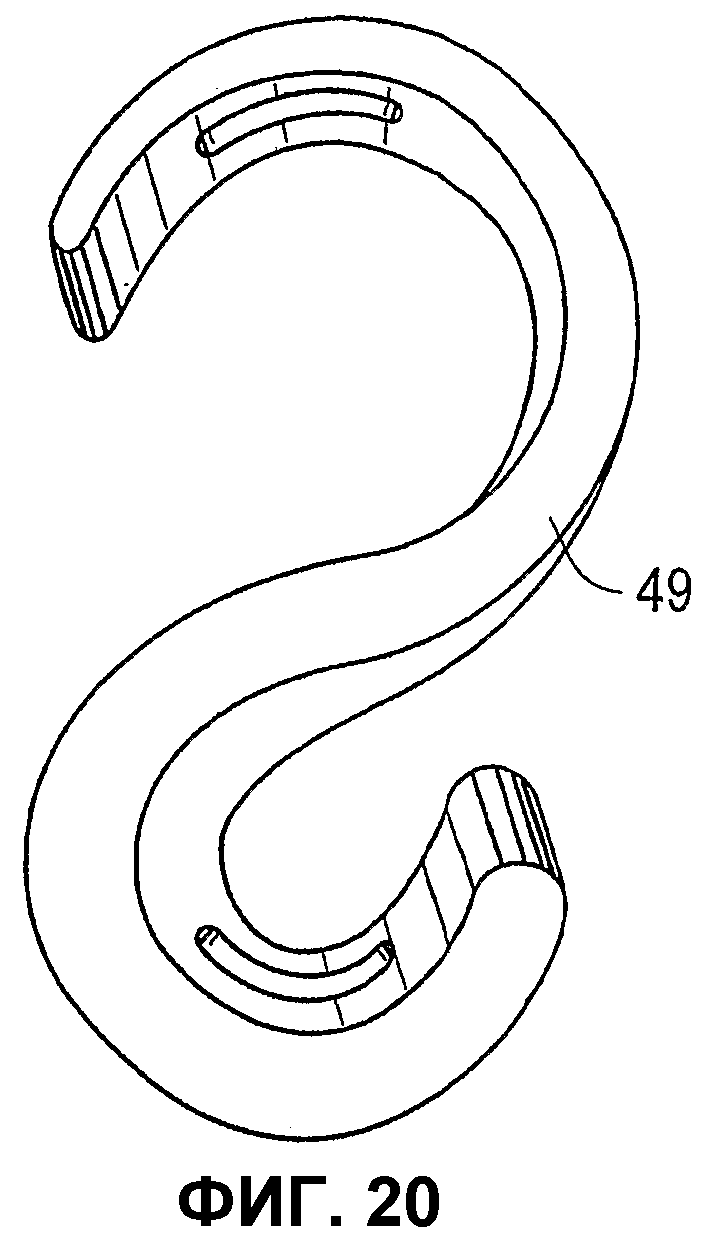
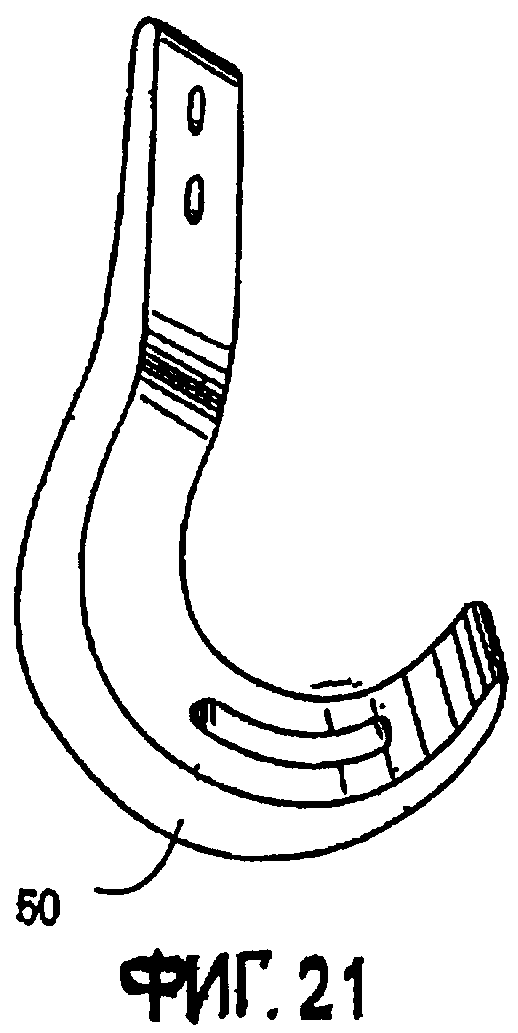
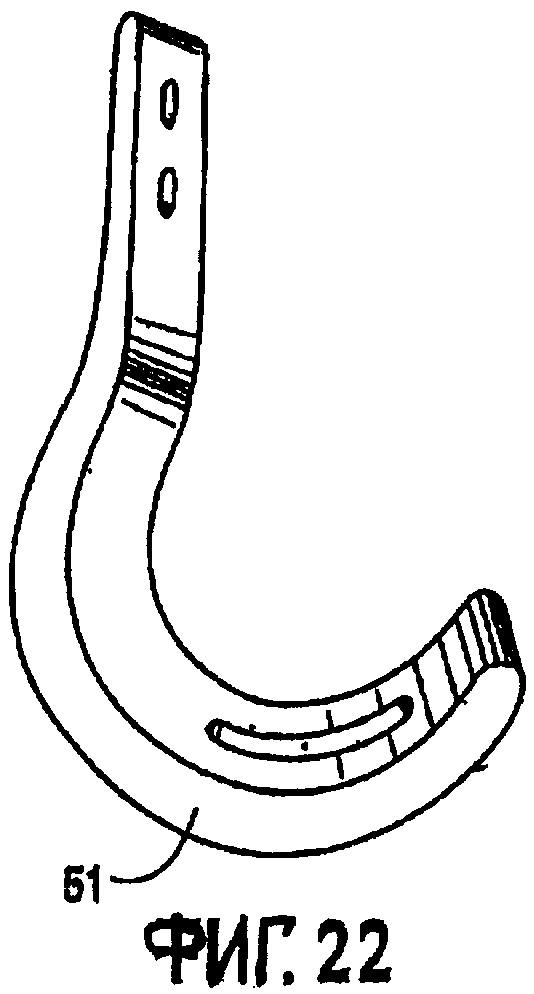
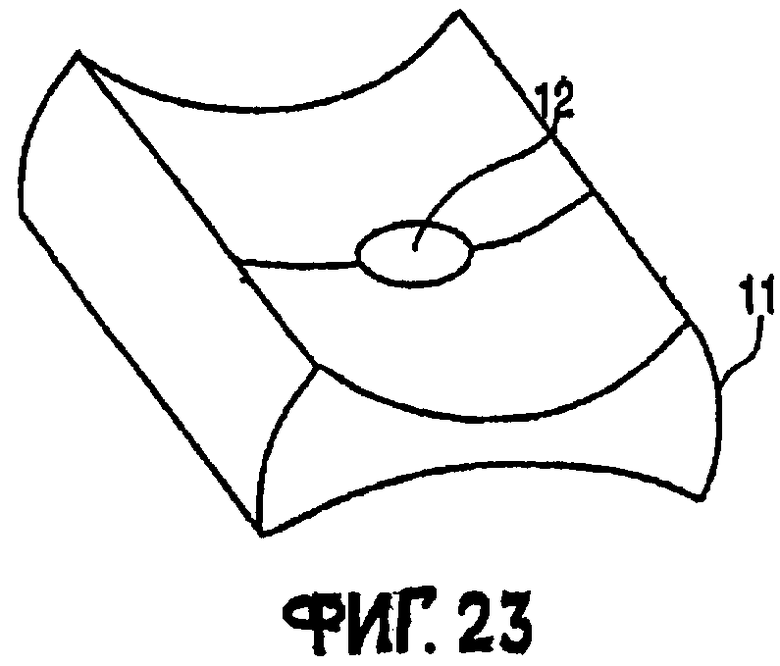
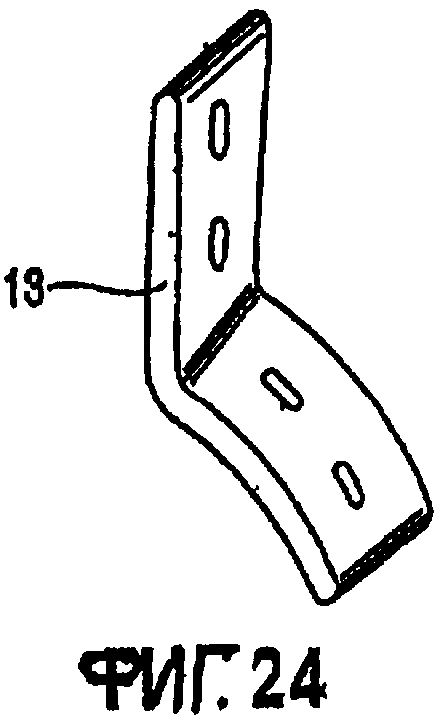
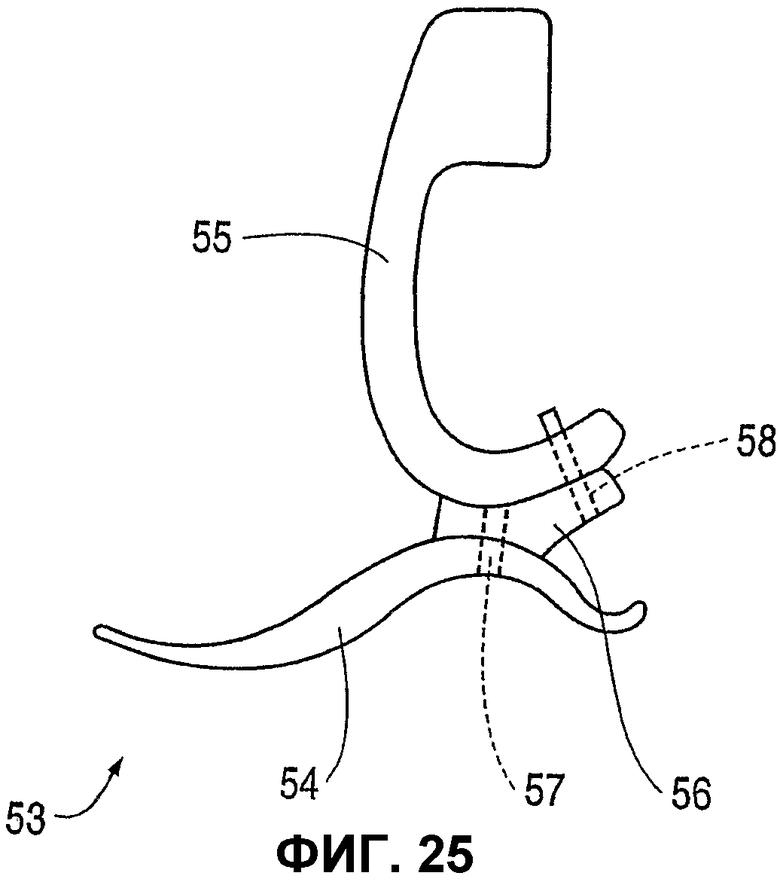
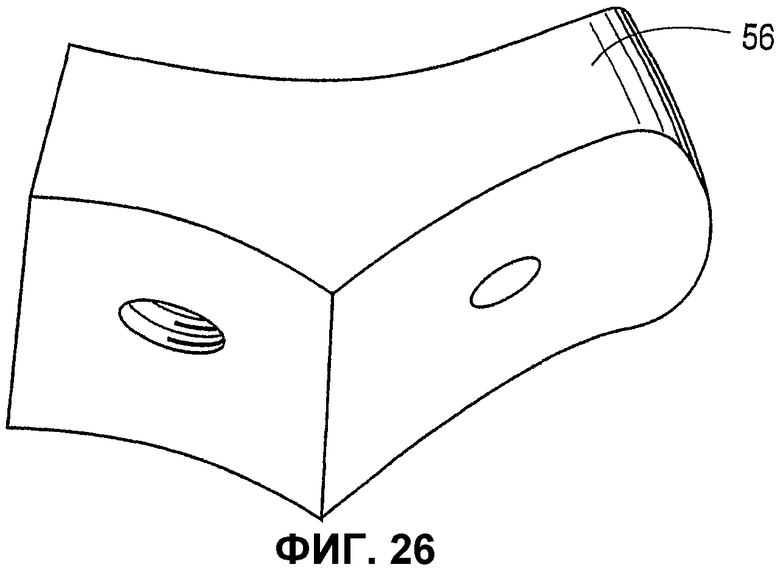
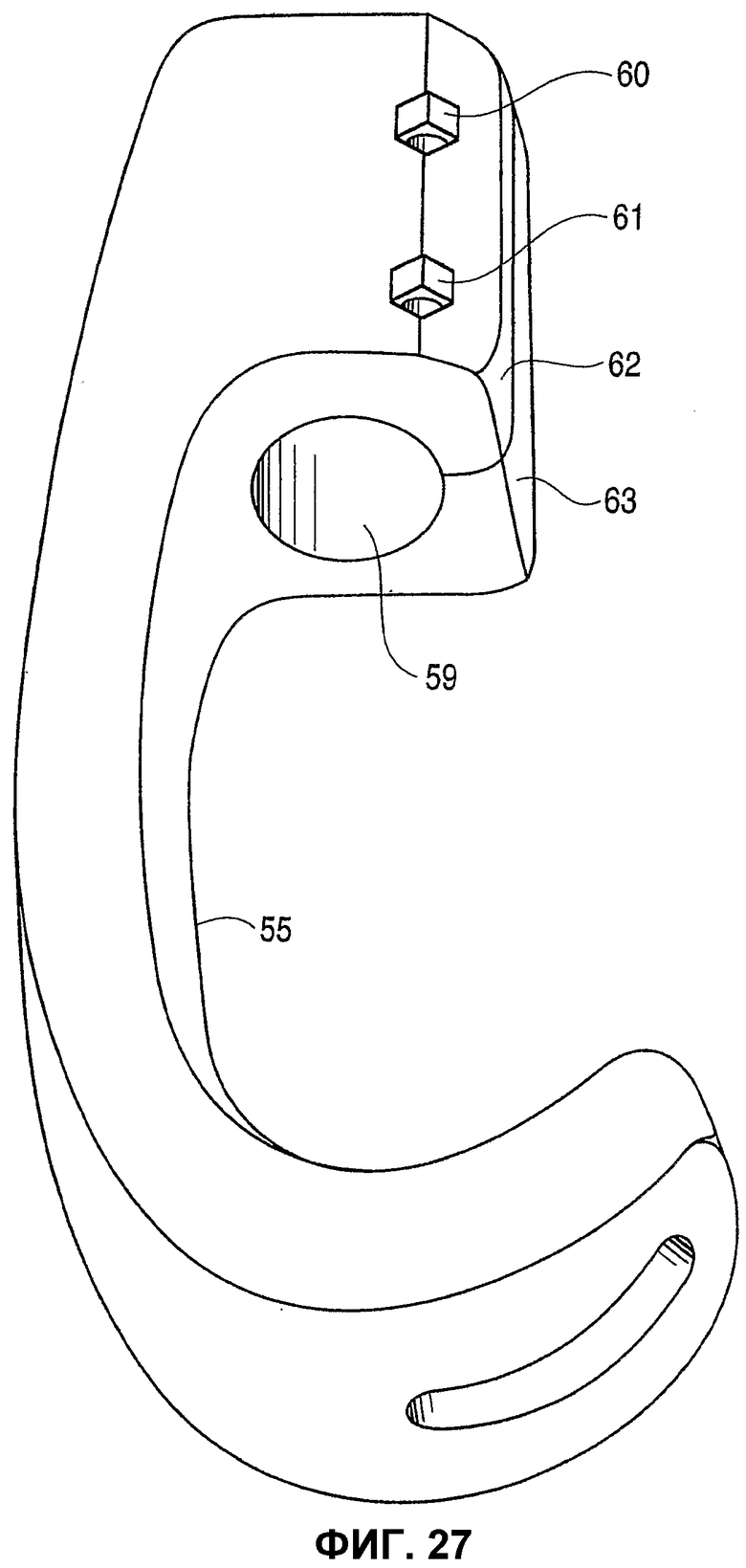
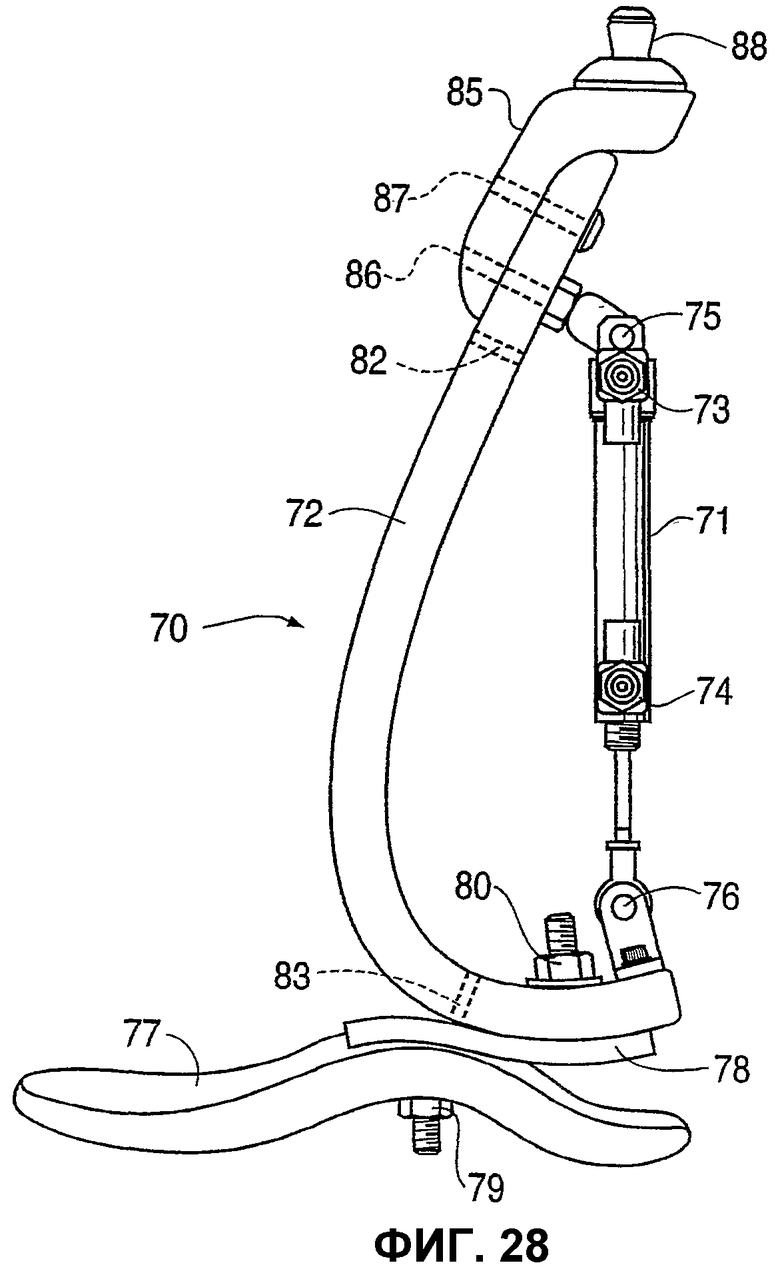
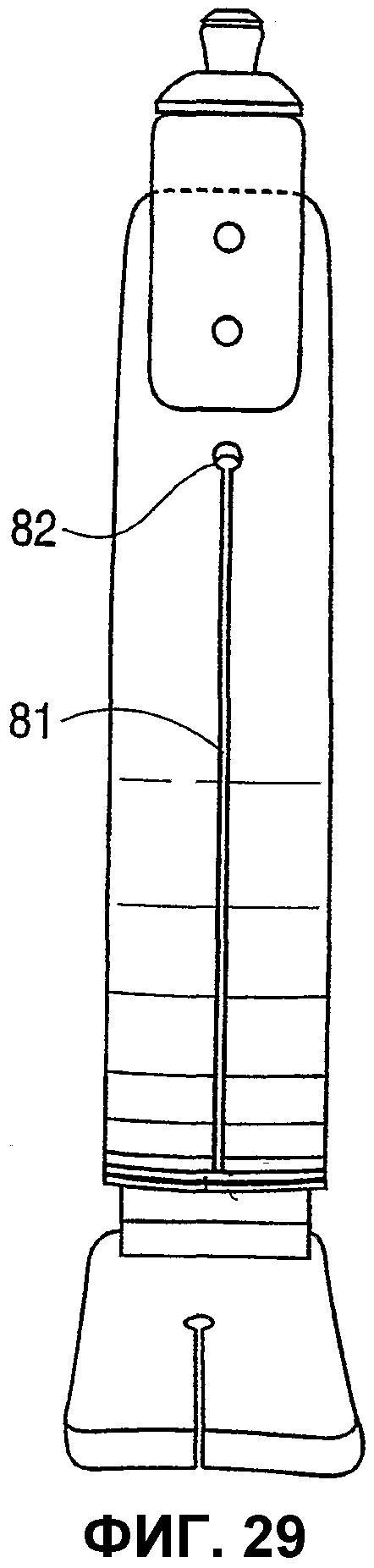
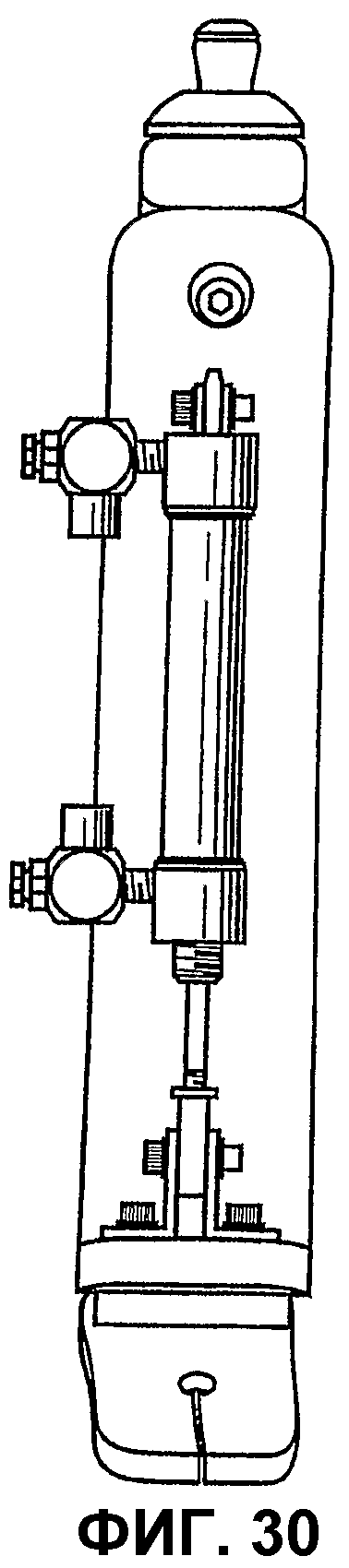
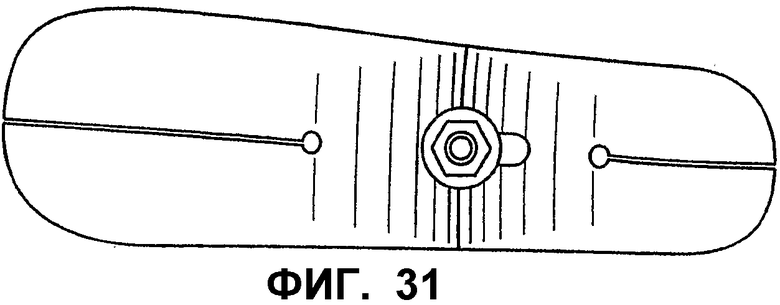
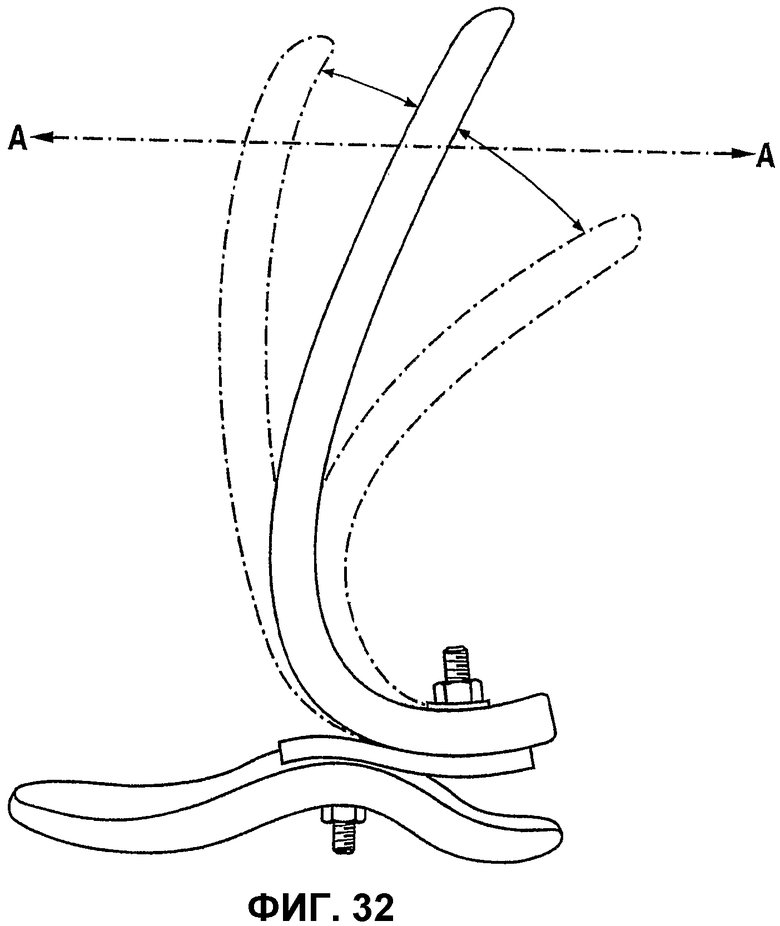
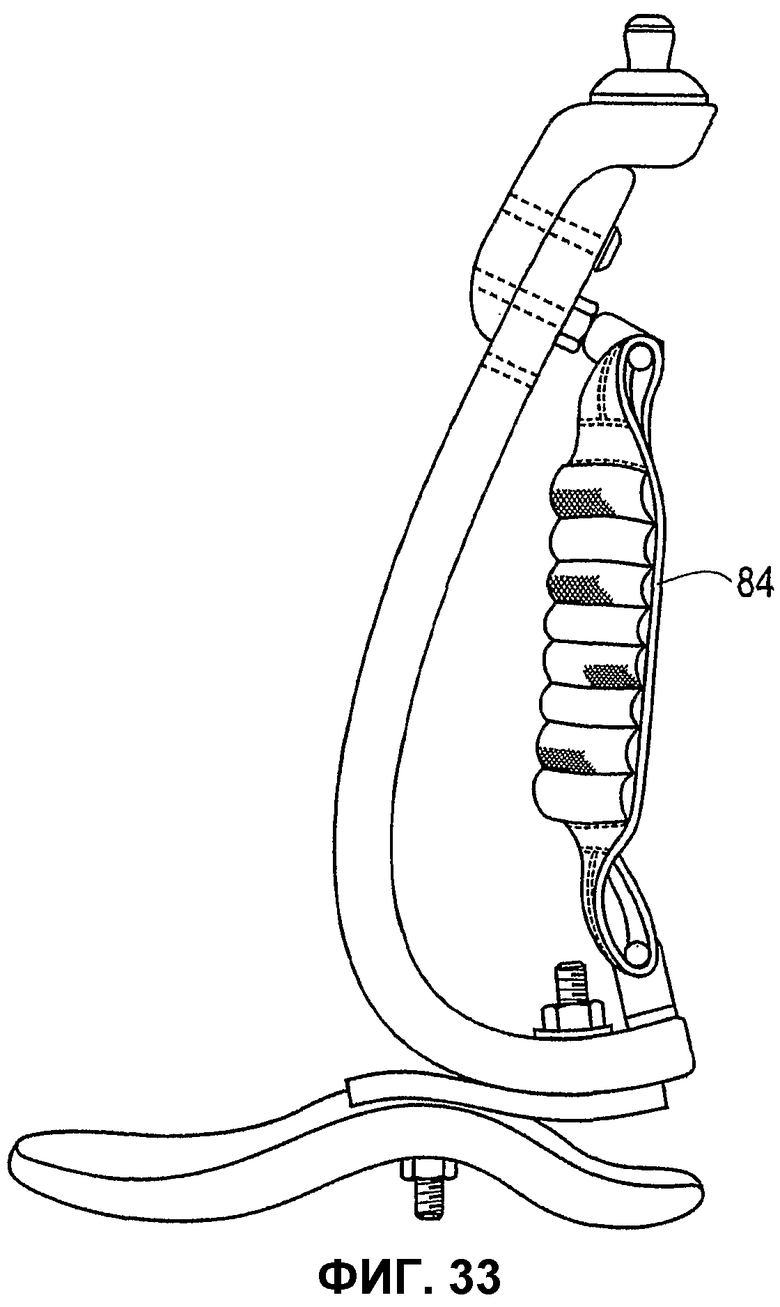
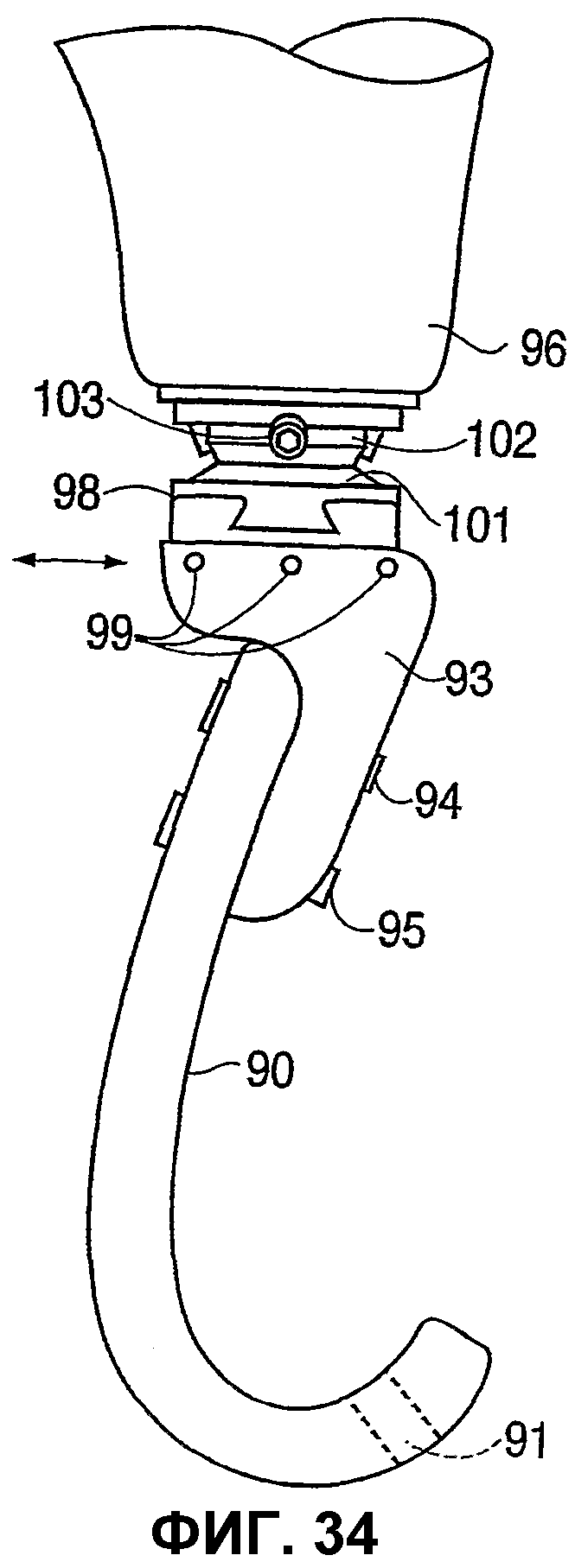
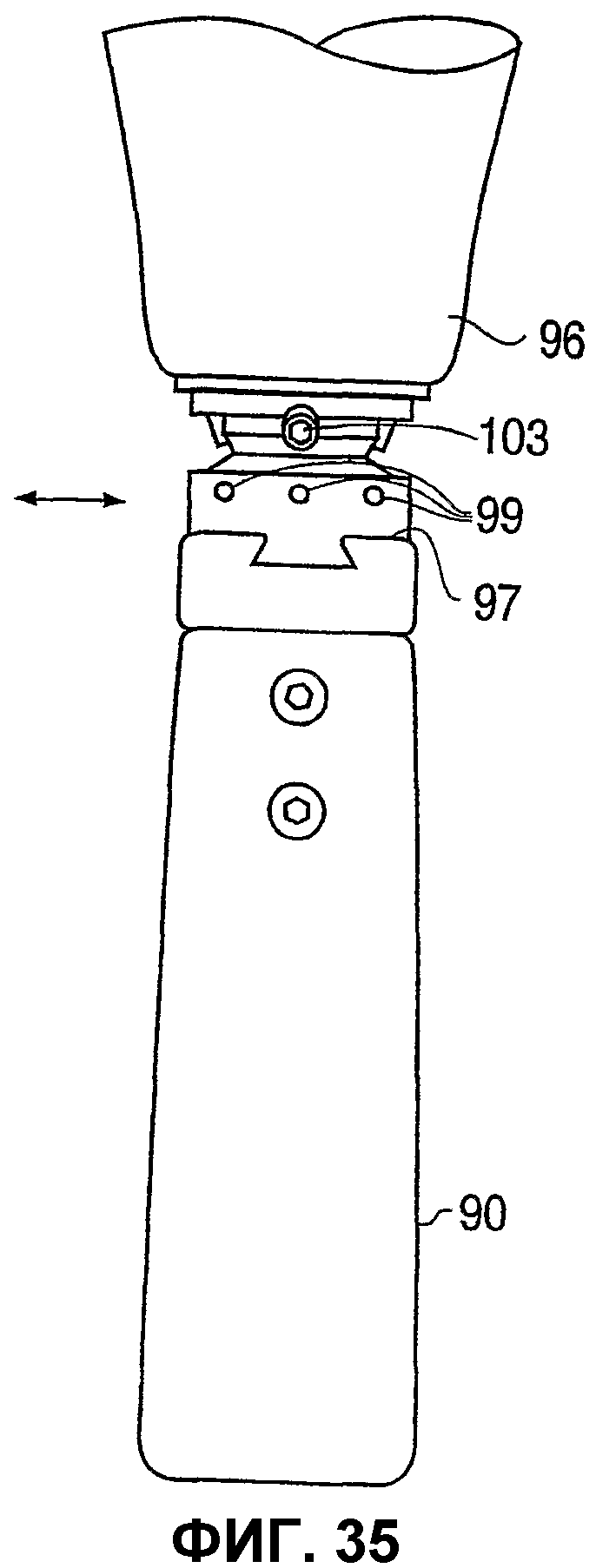
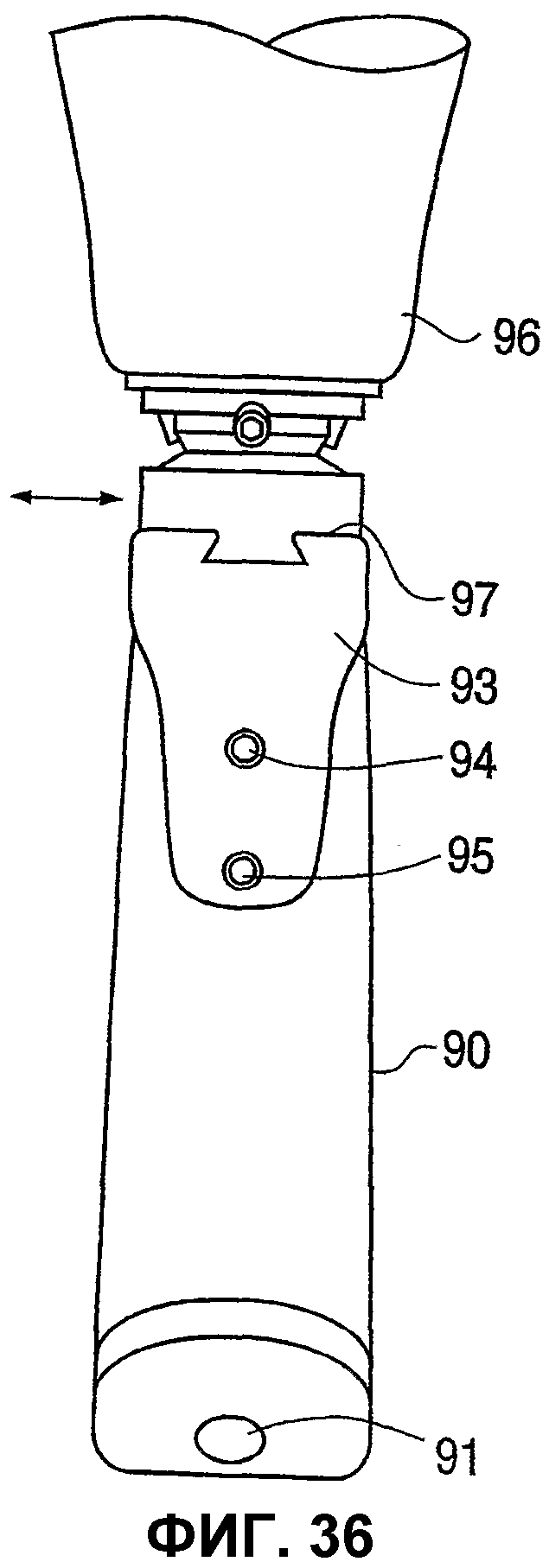
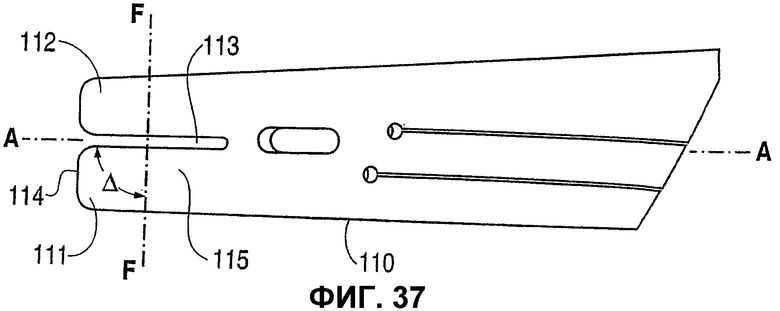
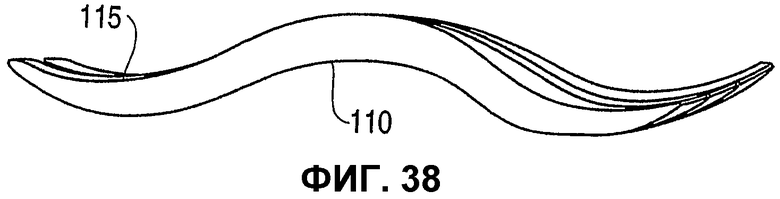
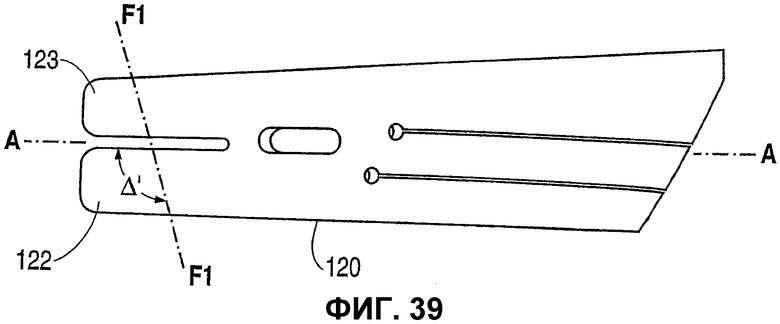
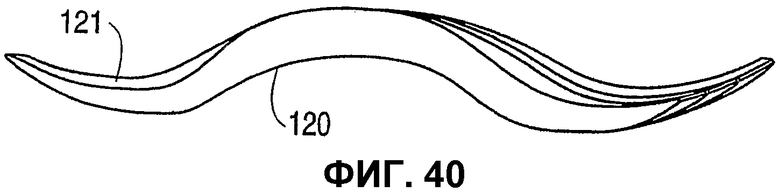
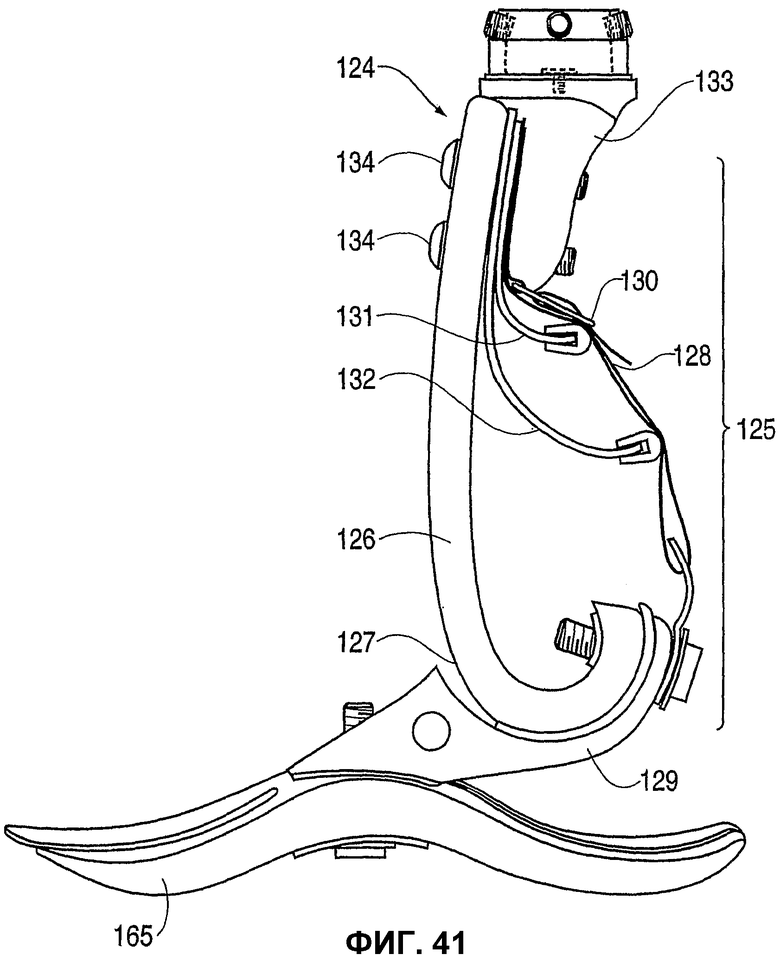
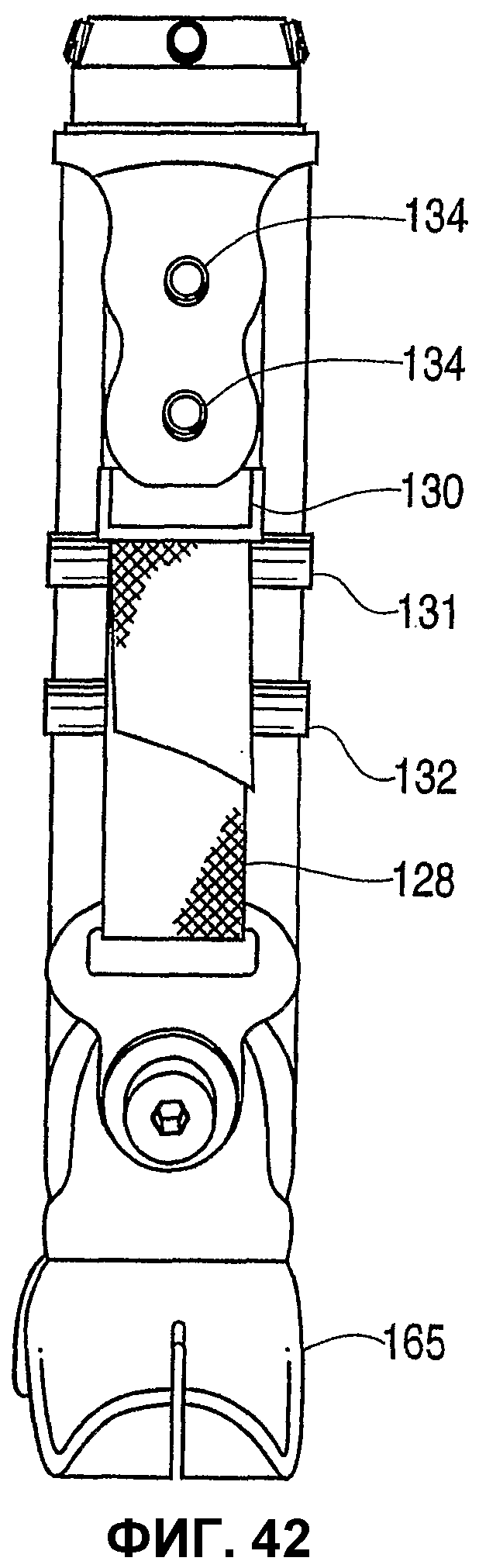
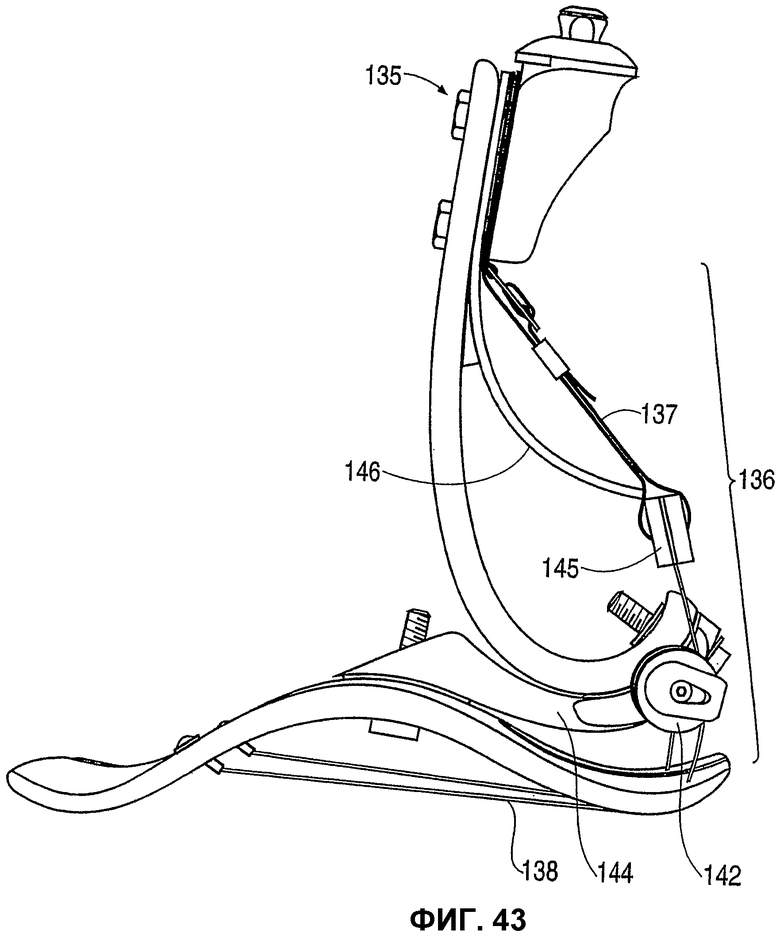
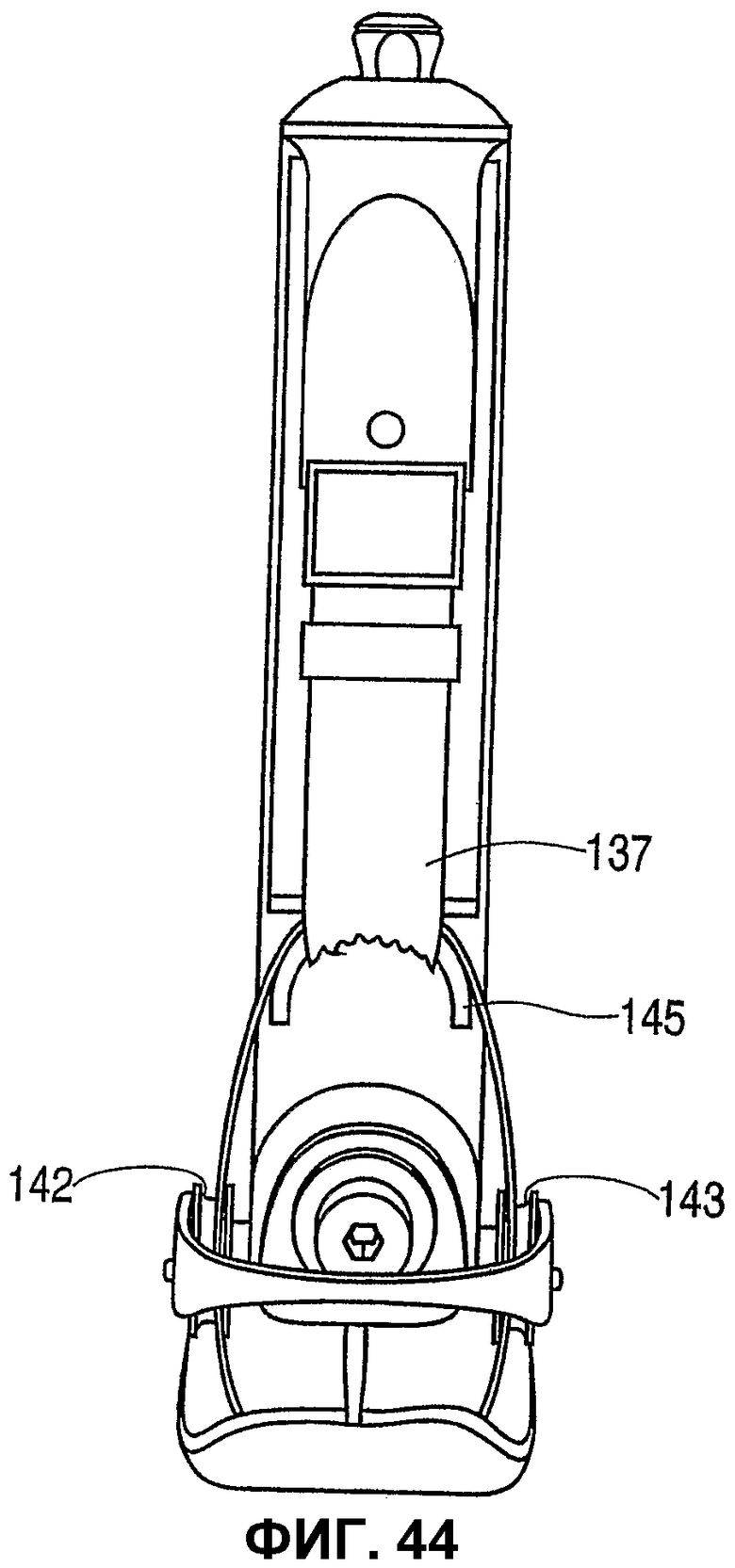
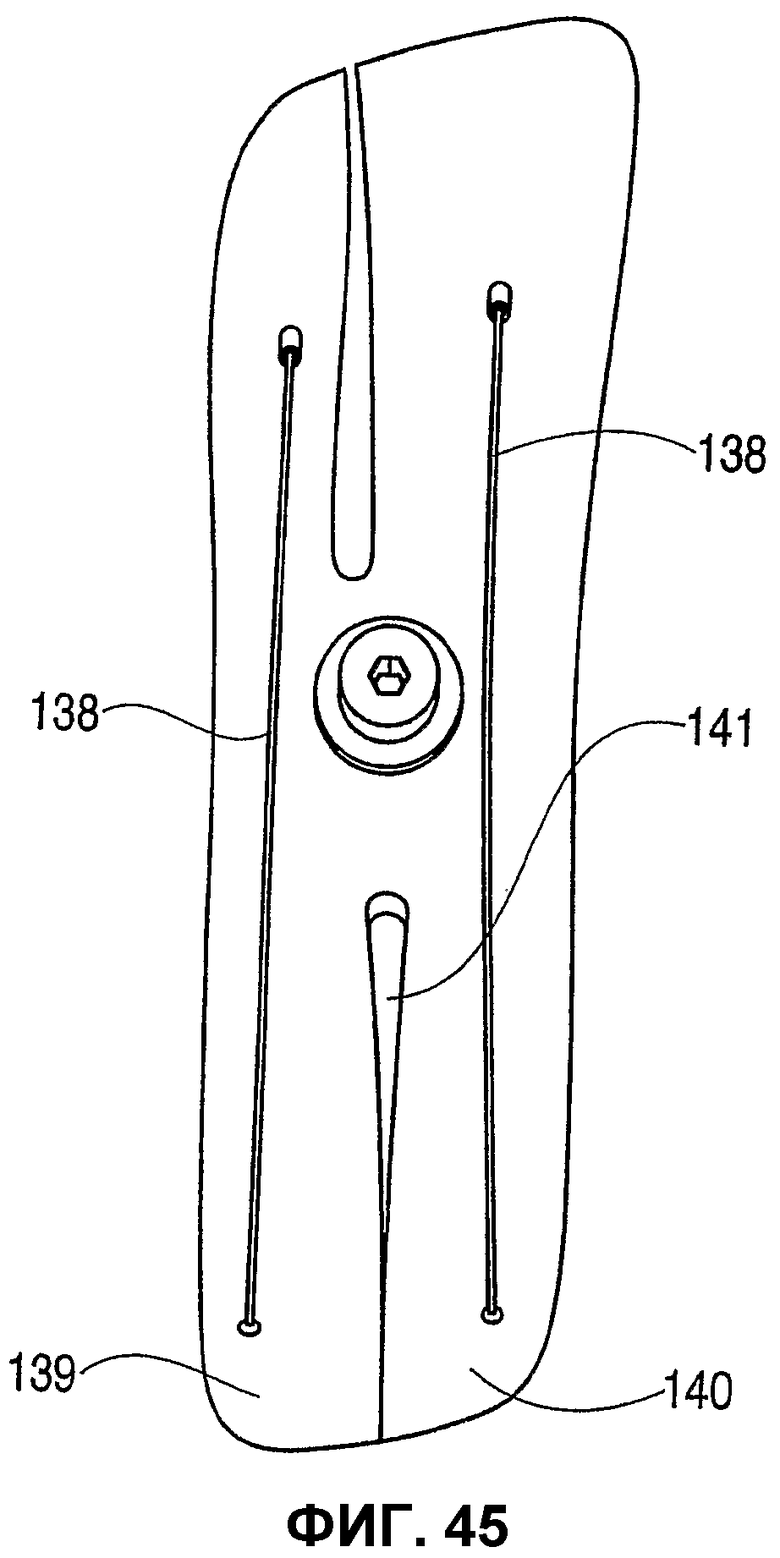
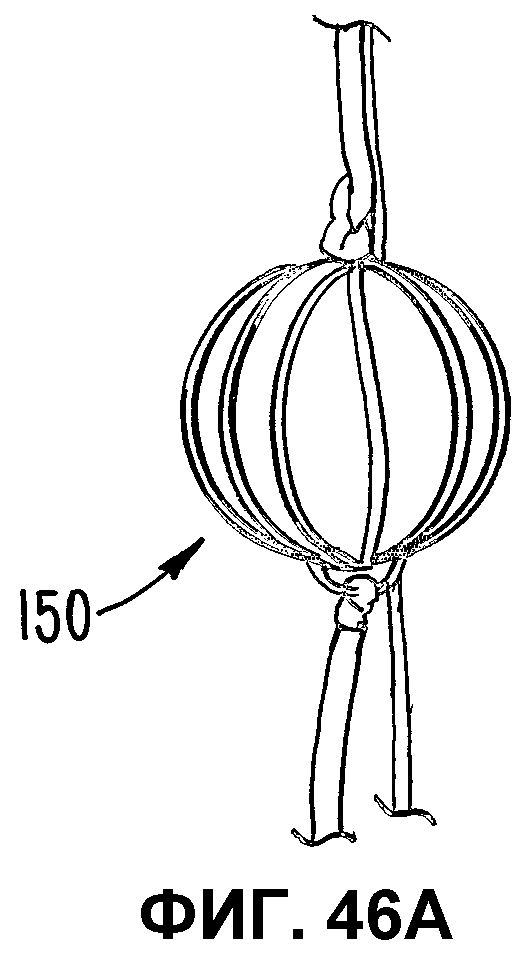
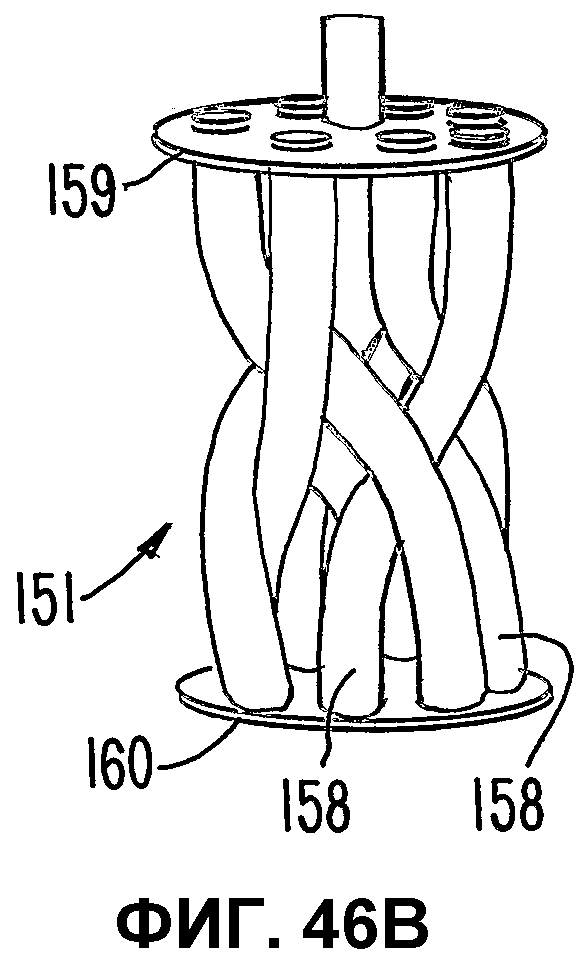
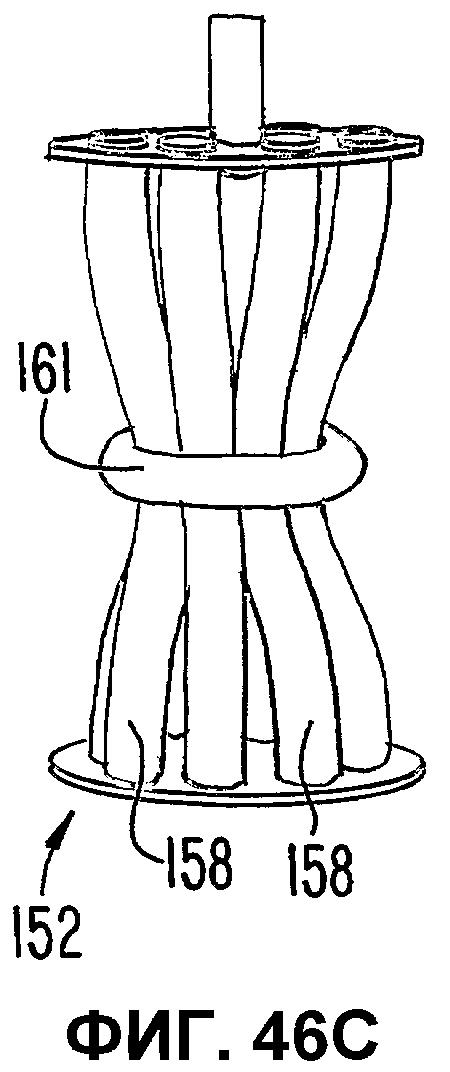
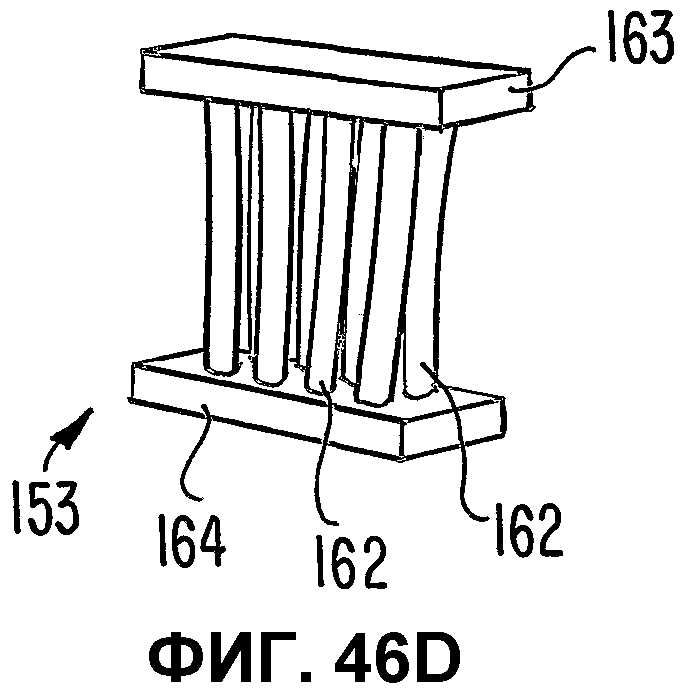
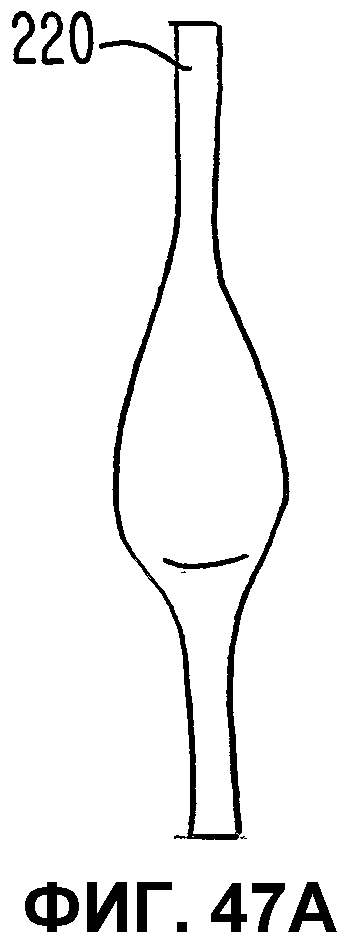
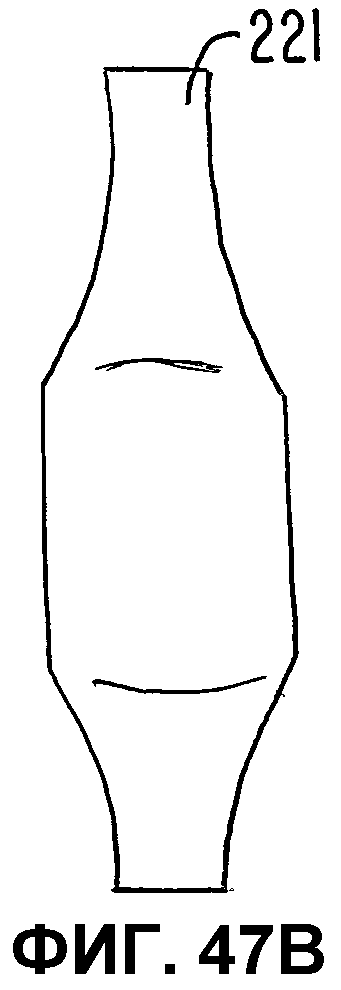
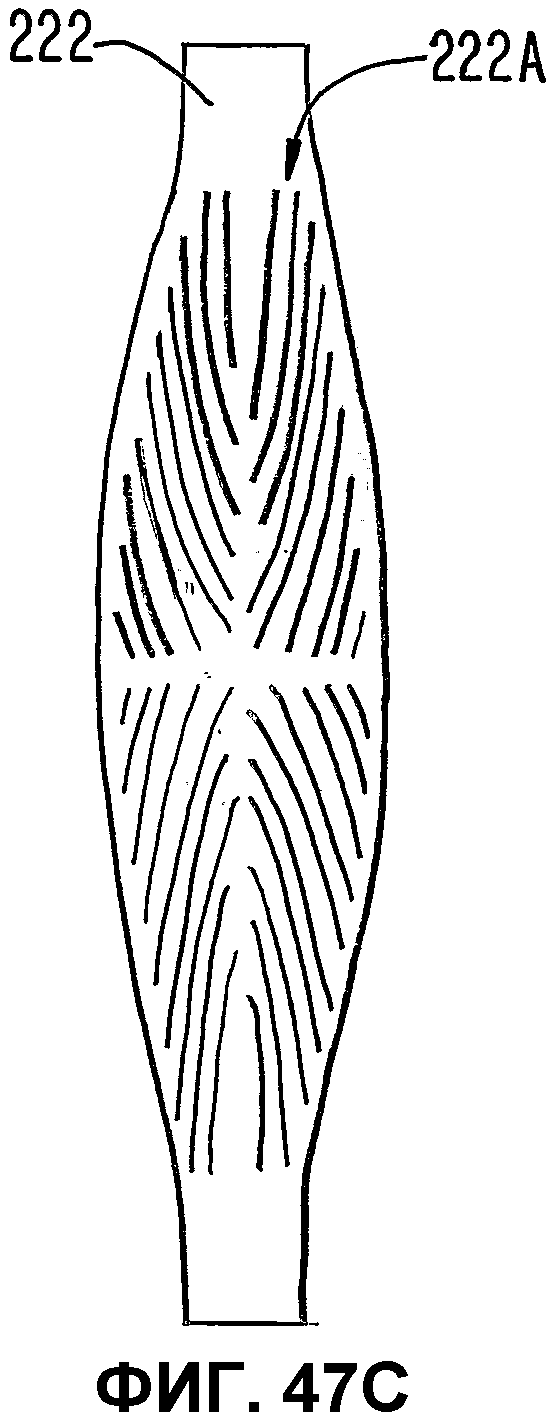
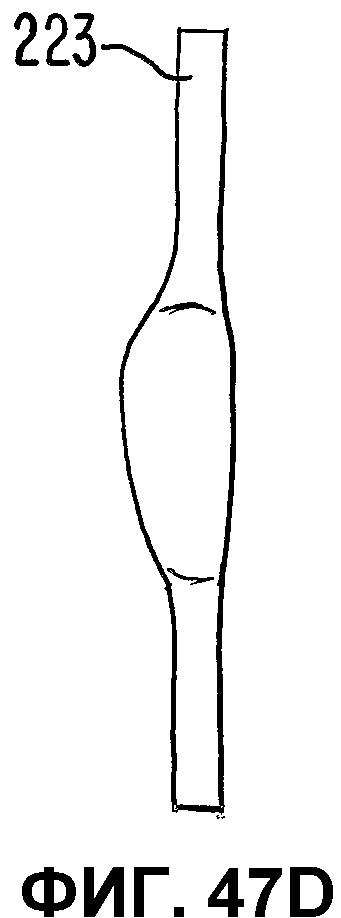
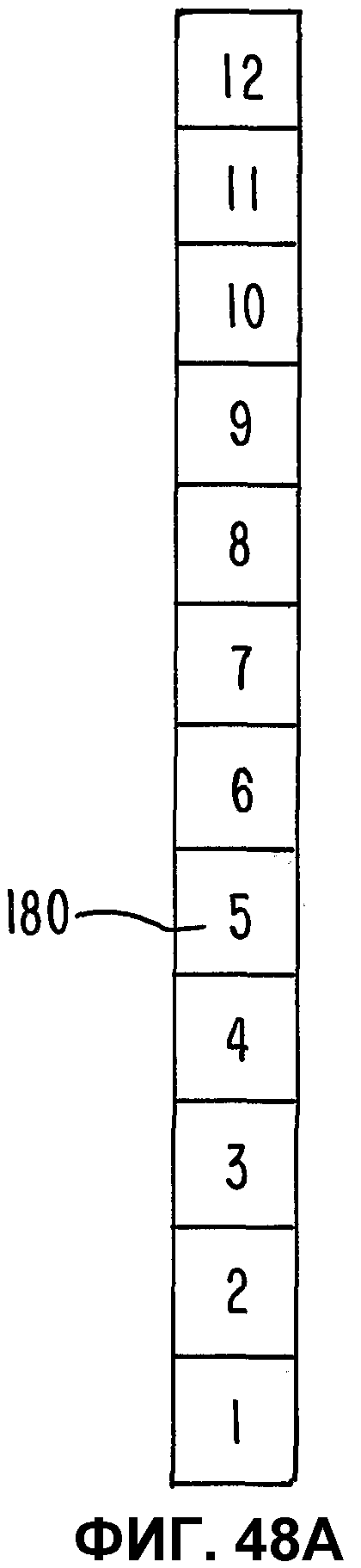
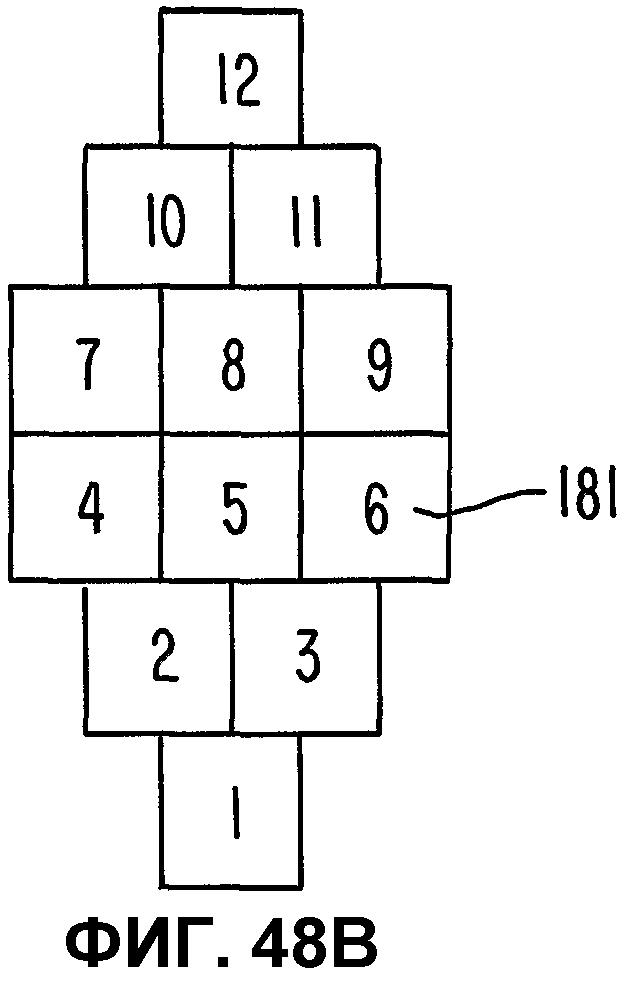
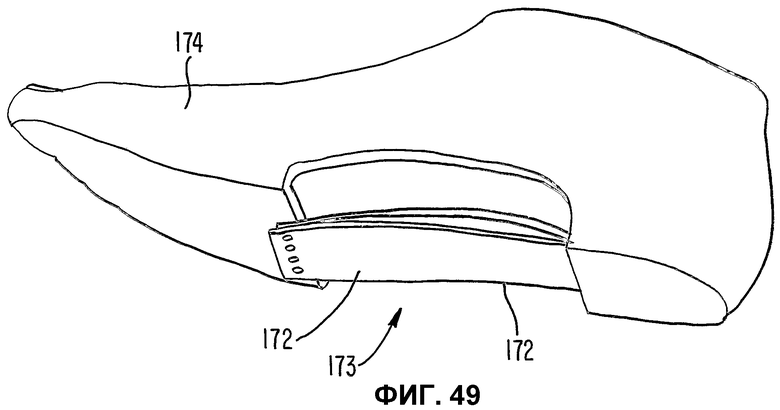
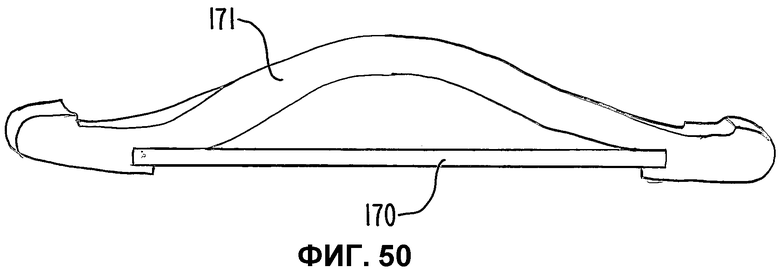
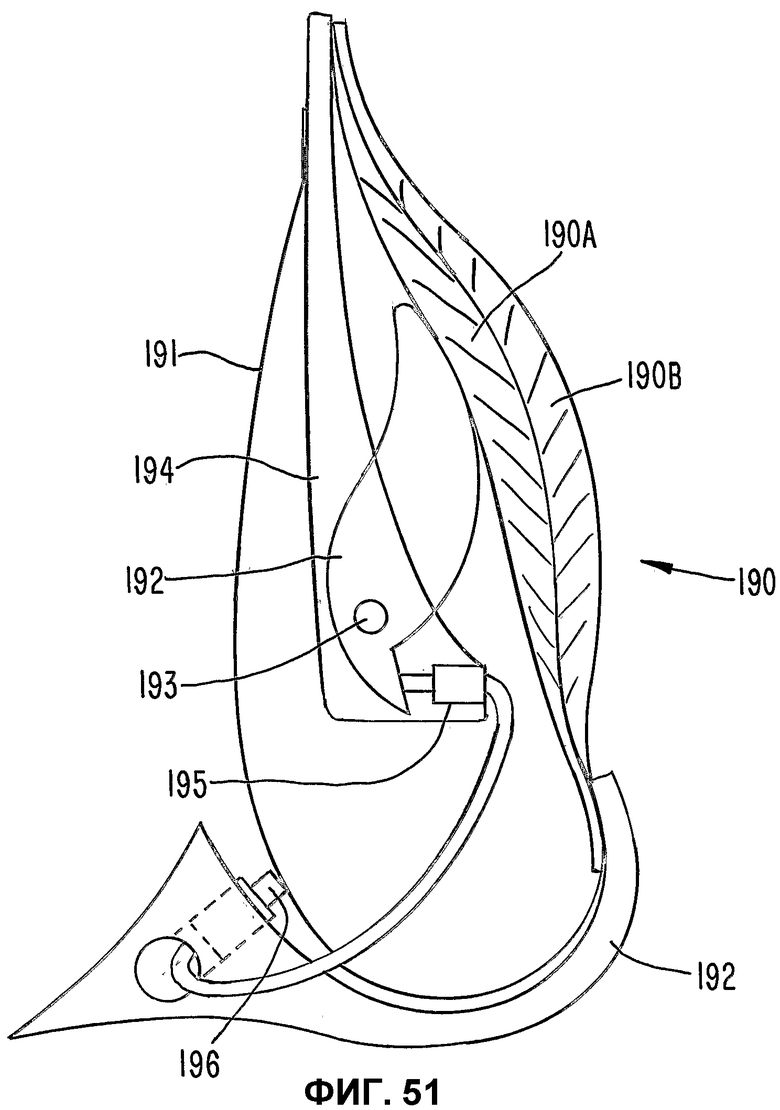
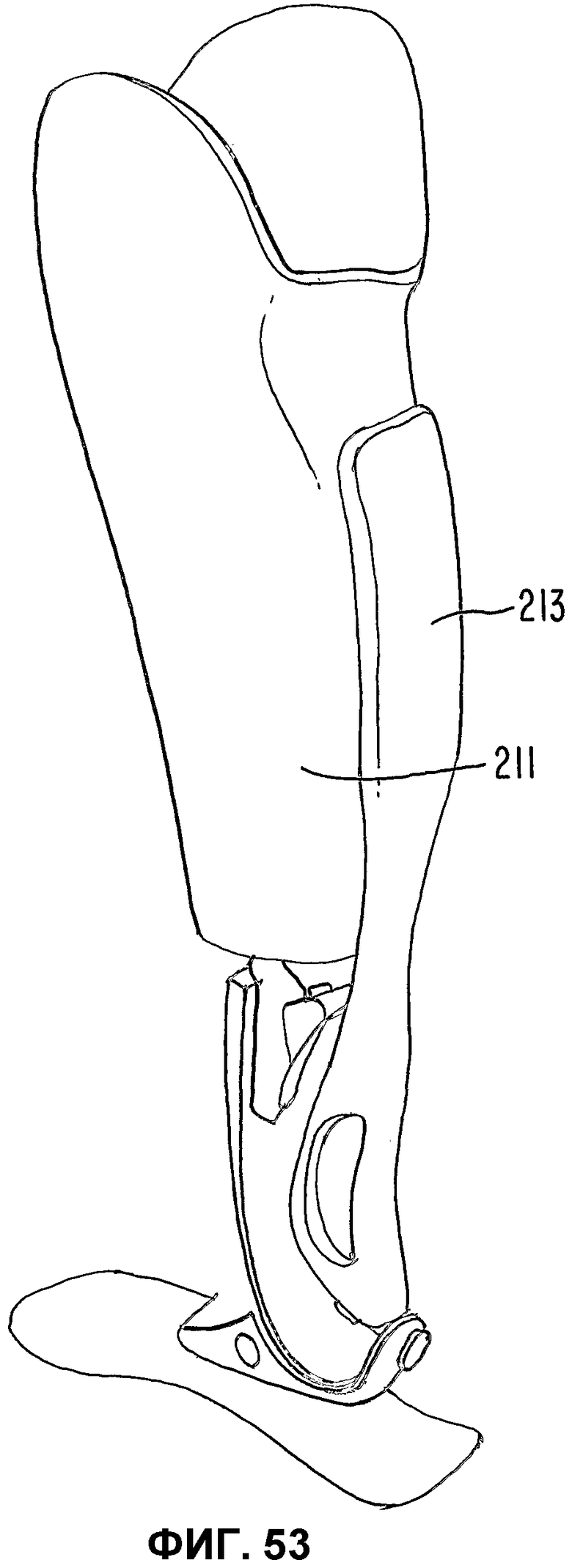
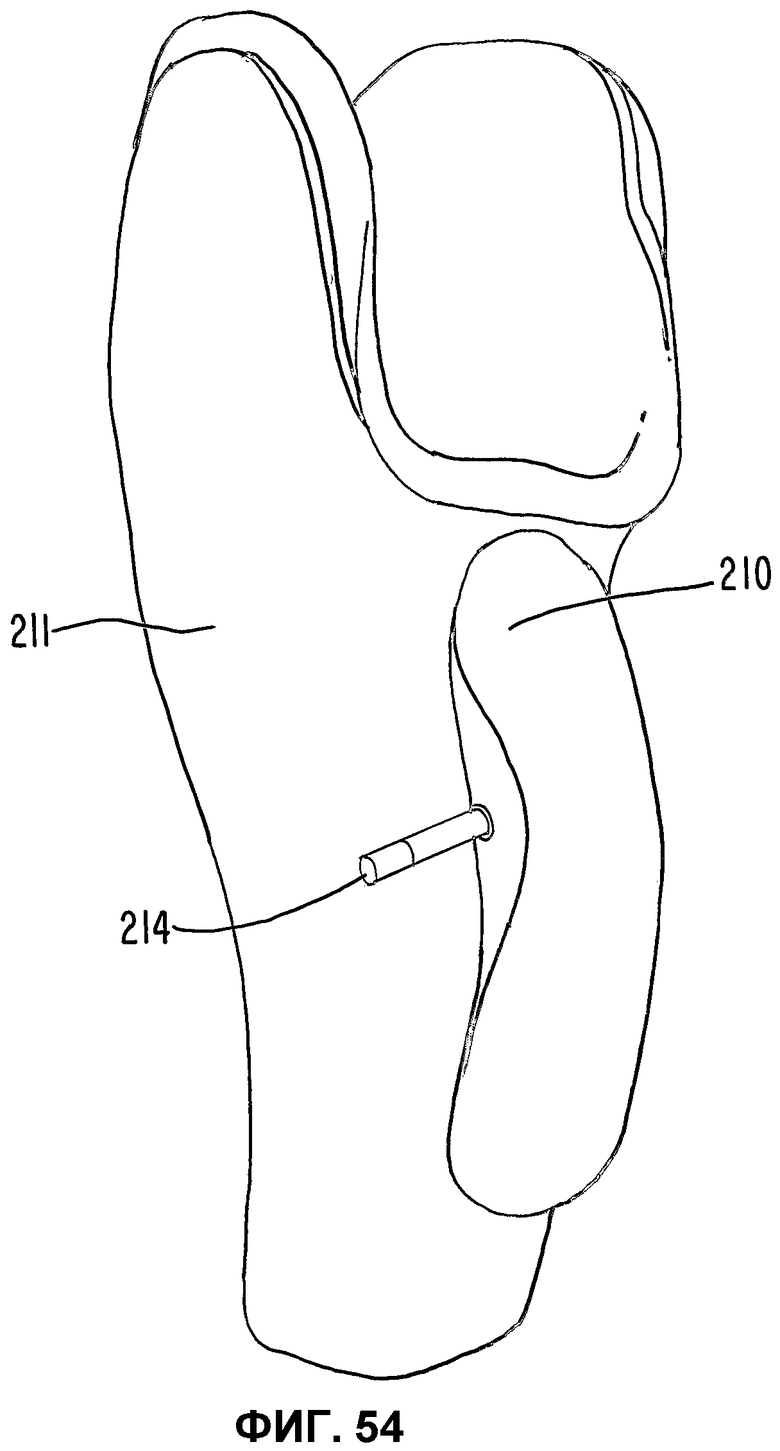
Группа изобретений предназначена для использования в протезах нижних конечностей и может быть использована в протезировании и протезостроении. Протез нижней конечности содержит стопу, голеностопный сустав, стойку голени и искусственную мышцу. Стойка голени является изогнутой выпуклостью вперед от нижнего конца стойки голени до верхнего конца стойки голени. Стойка голени выполнена с возможностью изгиба в продольном направлении во время шага для накопления и высвобождения энергии для совершенствования динамической реакции протеза во время шага. Искусственная мышца выполнена с возможностью накопления энергии во время приложения силовой нагрузки на протез в активной толчковой фазе шага человека и на более поздних этапах фазы положения во время шага, высвобождения упомянутой энергии для усиления толчка ведомой конечности и тела человека. Способ производства кинетической энергии для толкающей силы в упругом протезе нижней конечности включает следующие этапы: распрямляют две расположенные в сагиттальной плоскости вогнутости, включая обращенную назад расположенную в сагиттальной плоскости вогнутость стойки голени, чтобы накапливать энергию в протезе во время приложения силовой нагрузки в активной толчковой фазе шага человека. Во время приложения силовой нагрузки на протез в активной толчковой фазе шага накапливают дополнительную энергию в искусственной мышце. На поздних этапах фазы положений во время шага высвобождают дополнительную энергию, чтобы дополнительно усилить толчок ведомой конечности и тела пользователя. Техническим результатом изобретения является повышение двигательных возможностей спортсменов с ампутированной конечностью. 2 н. и 27 з.п. ф-лы, 54 ил.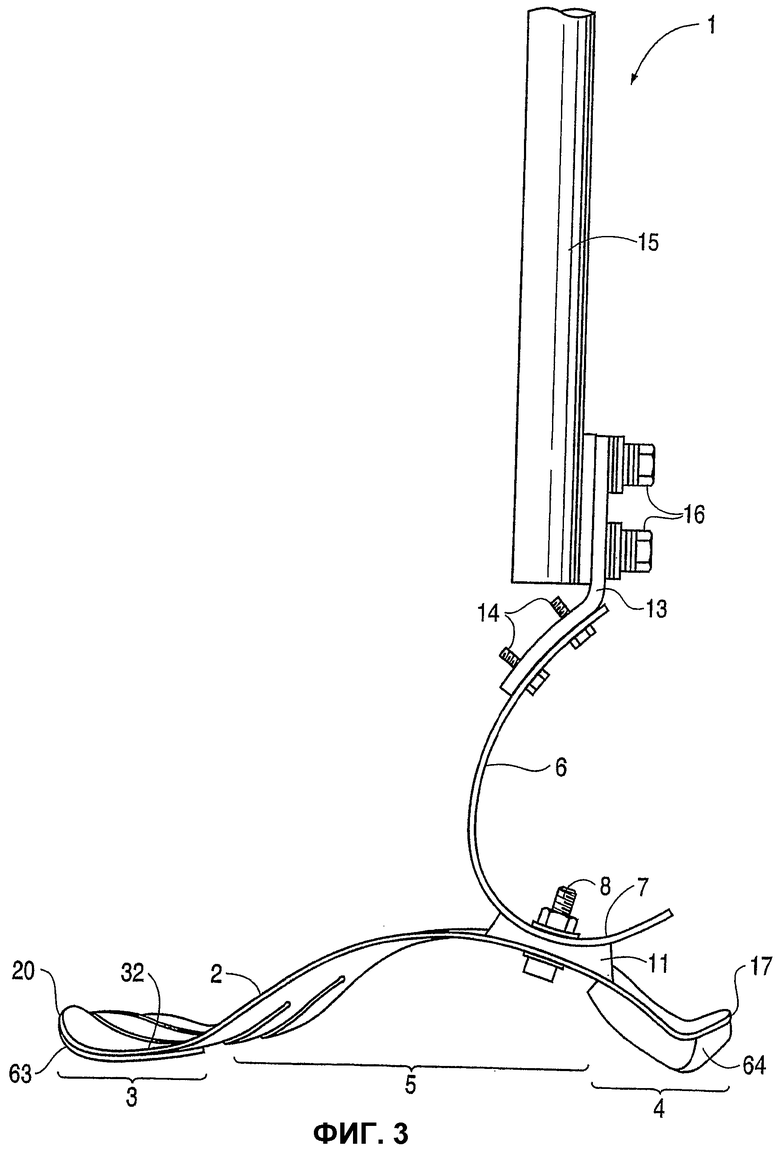
распрямляют, по меньшей мере, две расположенные в сагиттальной плоскости вогнутости, включая обращенную назад расположенную в сагиттальной плоскости вогнутость стойки голени, упругого протеза во время приложения силовой нагрузки на протез в активной толчковой фазе шага человека, чтобы накапливать энергию в протезе,
при этом протез выполнен с возможностью высвобождения упомянутой энергии, накопленной в указанной распрямленной вогнутости, расположенной в сагиттальной плоскости, на более поздних этапах фазы положений во время шага для усиления толчка ведомой конечности и тела человека,
причем во время приложения упомянутой силовой нагрузки на протез в активной толчковой фазе шага, накапливают дополнительную энергию в искусственной мышце, обеспеченной на, по меньшей мере, чем-то одном из стопы, голеностопного сустава и стойки голени протеза, и, на упомянутых поздних этапах фазы положений во время шага, высвобождают упомянутую дополнительную энергию, чтобы дополнительно усиливать толчок ведомой конечности и тела пользователя.
стопу, продолжающуюся в продольном направлении;
упругий голеностопный сустав;
удлиненную выступающую вверх упругую стойку голени над голеностопным суставом,
при этом голеностопный сустав и стойка голени выполнены как упругий элемент, причем стойка голени является изогнутой выпуклостью вперед от нижнего конца стойки голени до верхнего конца стойки голени, таким образом, что обращенная назад расположенная в сагиттальной плоскости вогнутость сформирована за счет изогнутости стойки голени, и стойка голени выполнена с возможностью изгиба в продольном направлении во время шага для накопления и высвобождения энергии для совершенствования динамической реакции протеза во время шага;
искусственную мышцу, обеспеченную на, по меньшей мере, чем-то одном из стопы, голеностопного сустава и стойки голени протеза, причем искусственная мышца выполнена с возможностью накопления энергии во время приложения силовой нагрузки на протез в активной толчковой фазе шага человека и на более поздних этапах фазы положения во время шага, высвобождения упомянутой энергии для усиления толчка ведомой конечности и тела человека.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5387246 А, 07.02.1995 | |||
| US 5290319 А, 01.03.1994 | |||
| ПРОТЕЗ СТОПЫ | 1996 |
|
RU2102942C1 |

