Область техники, к которой относится изобретение
Описана протезная стопа, которая функционально имитирует человеческую стопу. Протезная стопа имеет способность движения заднего отдела стопы в трех плоскостях, способность движения среднего отдела стопы и переднего отдела стопы в двух плоскостях и динамические характеристики по принципу повышенной и пониженной передачи для улучшения качеств походки и комфорта человека с ампутированной стопой при ходьбе, беге и прыжках. Также описан компонент голеностопного пилона, обеспечивающий способность движения заднего отдела стопы в трех плоскостях для повышения характеристик существующей низкопрофильной протезной стопы.
Предпосылки и сущность изобретения
Специалисты в области протезирования в прошлом изготовляли протезные стопы, которые допускали различные степени способности движения. В большинстве известных протезных стоп используют металлические шарниры с резиновыми амортизаторами для обеспечения этой способности движения. Эти компоненты являются источниками механических отказов и износа. Известные протезные стопы также обычно дороги в производстве и установке. Ни одна из обычных протезных стоп не имитирует, например, характеристик походки человека, и, хотя известные конструкции допускают некоторую способность движения, обычная протезная стопа не отражает человеческих характеристик. Эти характеристики относятся к биомеханическим функциям человеческой стопы и голеностопного сустава для формирования походки. Протезные стопы предшествующего уровня техники не достигают реальных характеристик человеческой походки, поскольку признаки их конструкции не имитируют человеческую стопу.
Человеческая стопа представляет собой комплекс, содержащий двадцать шесть отдельных костей. Кости стопы поворачиваются относительно друг друга, образуя суставы. Суставы стопы благодаря этим поворотам допускают движение. Способность движения конкретного сустава зависит от поворота костей, укрепления связками и мышечного управления. Способность движения конкретных суставов стопы исторически довольно интенсивно исследовалась. Эти конкретные исследования определили четырнадцать разных осей поворота суставов человеческой стопы. Был проведен содержательный анализ, определивший, как эти оси поворота и способности движения действуют при ходьбе, беге и прыжках человека. Протезная стопа, соответствующая настоящему изобретению, была изготовлена в свете этих научных исследований с целью получения усовершенствованной протезной стопы, которая имитирует человеческую стопу в действии, позволяя человеку с ампутированной стопой иметь нормальную человеческую походку, и улучшает качество жизни человека с ампутированной стопой.
Протезная стопа, соответствующая настоящему изобретению, содержит переднюю часть стопы, среднюю часть стопы и заднюю часть стопы, причем задняя часть стопы включает первое и второе соединения, обеспечивающие при ходьбе движение протезной стопы по замкнутой кинетической схеме. Первое соединение имеет ось соединения, ориентированную для обеспечения движения задней части стопы вокруг оси первого соединения, по меньшей мере, большей частью в сагиттальной плоскости. Второе соединение имеет ось соединения, ориентированную для обеспечения движения задней части стопы вокруг оси второго соединения, по меньшей мере, большей частью во фронтальной и поперечной плоскостях. В описанных примерных вариантах осуществления изобретения первое и второе соединения сформированы как единое целое с задней частью стопы в форме соответствующих стоек из упругого материала задней части стопы. Более конкретно, в одном примерном варианте осуществления изобретения передняя, средняя и задняя части протезной стопы сформированы из единого куска пластмассы посредством формования и/или механической обработки.
Во втором варианте осуществления изобретения усовершенствованная протезная стопа, соответствующая изобретению, сформирована с использованием голеностопного пилона, соответствующего изобретению, который прикрепляют к существующей низкопрофильной протезной стопе для повышения ее функциональности. Голеностопный пилон включает первое и второе соединения, которые формируют часть задней части стопы. В обоих вариантах осуществления изобретения первое соединение в задней части стопы имитирует голеностопный сустав, и второе соединение имитирует подтаранный сустав, позволяя стопе функционировать как нормальная стопа.
Подтаранное соединение в задней части стопы описанных вариантов осуществления изобретения составляет средство, обеспечивающее при ходьбе движение протезной стопы по замкнутой кинетической схеме в трех плоскостях. Эта способность движения в трех плоскостях улучшает установку стопы с уклоном подошвы в фазе ее установки при ходьбе. Она также снижает поперечные силы, воздействующие на остаточную конечность в гнезде, связанные с движением в поперечной плоскости.
Эти и другие цели, признаки и преимущества настоящего изобретения будут более понятны при ознакомлением с нижеследующим подробным описанием раскрытых примерных вариантов осуществления изобретения, данных с прилагаемыми чертежами.
Краткое описание чертежей
Указанное выше и лучшее понимание настоящего изобретения будут очевидны при ознакомлении с нижеследующим подробным описанием примерных вариантов осуществления изобретения и с формулой изобретения в сочетании с прилагаемыми чертежами, формирующими часть описания этого изобретения. Хотя указанное выше и нижеследующее написанное и проиллюстрированное описание сфокусировано на нескольких примерных вариантах осуществления изобретения, следует ясно понимать, что они приведены только для иллюстрации и примера, и изобретение не ограничивается этим. Сущность и объем настоящего изобретения ограничены только прилагаемой формулой изобретения.
Далее дано краткое описание чертежей, на которых:
фиг.1 - вид в перспективе спереди справа и немного сверху правой протезной стопы, соответствующей первому примерному варианту осуществления изобретения.
Фиг.2 - вид сбоку протезной стопы, показанной на фиг.1, помещенной в косметическое покрытие стопы, показанное пунктирными линиями, и в положении для соединения с примыкающим протезом на ноге человека с ампутированной стопой, также показанным пунктирными линиями.
Фиг.3 - вид сбоку с медиальной стороны протезной стопы, показанной на фиг.1.
Фиг.4 - вид сверху протезной стопы, показанной на фиг.1.
Фиг.5 - вид снизу протезной стопы, показанной на фиг.1.
Фиг.6 - схематический вид оси голеностопного соединения протезной стопы в проекции на фронтальную плоскость, при этом можно видеть, что ось голеностопного соединения отклоняется от поперечной плоскости на угол β, при этом медиальная часть более проксимальна, чем латеральная.
Фиг.7 - вид сечения стойки голеностопного соединения, выполненного по линии VII-VII на фиг.3.
Фиг.8 - схематический вид оси голеностопного соединения протезной стопы в проекции на сагиттальную плоскость, при этом можно видеть, что ось голеностопного соединения отклоняется от поперечной плоскости на угол θ, при этом передняя часть более проксимальна, чем задняя часть.
Фиг.9 - схематический вид оси подтаранного соединения протезной стопы в проекции на сагиттальную плоскость, показывающий ось подтаранного соединения под углом ψ к поперечной плоскости с передней частью, более проксимальной, чем задняя часть.
Фиг.10 - схематический вид подтаранного соединения протезной стопы в проекции на фронтальную плоскость, при этом ось находится под углом ω к поперечной плоскости с медиальной частью, более проксимальной, чем латеральная.
Фиг.11 - увеличенный вид сверху тыльной стороны протезной стопы, показанной на фиг.1, в котором добавлены штриховые линии для показа углублений и выпуклостей на дорсальной поверхности корпуса стопы для осуществления движения стопы при ходьбе.
Фиг.12 - увеличенный вид снизу подошвенной стороны корпуса протезной стопы, показанной на фиг.1, в котором добавлены линии, показывающие области контакта в срединном положении стопы на уровне поверхности при ходьбе, и в котором добавлены штриховые линии для обозначения выемок в подошвенной поверхности корпуса для осуществления движения стопы при ходьбе.
Фиг.13 - вид сечения нижней части средней части стопы корпуса протезной стопы, выполненного по линии XIII-XIII на фиг.2, показывающий отклонение продольного свода под углом Ε к поперечной плоскости с медиальной частью, более проксимальной, чем латеральная часть.
Фиг.14 - вид сбоку сформированного как единое целое металлического крепежного устройства для протезной стопы.
Фиг.15 - вид сверху устройства, показанного на фиг.14.
Фиг.16 - вид сверху нижней крепежной пластины устройства, показанного на фиг.14.
Фиг.17 - вид в перспективе голеностопного устройства, соответствующего изобретению, с протезом нижней конечности без стопы, прикрепленным к его верхней поверхности, причем голеностопное устройство может использоваться для прикрепления к существующей низкопрофильной протезной стопе типа Сиэтл или подобной протезной стопе в качестве компонента, повышающего функциональность стопы, при этом комбинация формирует другой вариант выполнения усовершенствованной протезной стопы, соответствующей изобретению.
Фиг.18 - вид сбоку правой стороны голеностопного устройства, показанного на фиг.17.
Фиг.19 - вид спереди голеностопного устройства, показанного на фиг.17.
Фиг.20 - вид сбоку левой стороны голеностопного устройства, показанного на фиг.19.
Фиг.21 - вид сзади голеностопного устройства, показанного на фиг.17.
Фиг.22 - вид снизу голеностопного устройства, ориентированного как показано на фиг.21.
Фиг.23 - вид сзади голеностопного устройства, подобный показанному на фиг.21, но показывающий пунктирными линиями Т-образную гайку, которая заделана в упругий корпус голеностопного устройства для прикрепления голеностопного устройства к протезной стопе с использованием резьбового болта.
Фиг.24 - вид сверху Т-образной гайки, которая показана штриховыми линиями на фиг.23.
Фиг.25 - вид сбоку Т-образной гайки, показанной на фиг.24, и ввинченного в нее резьбового болта.
Фиг.26 - вид сверху прохода обычной низкопрофильной протезной стопы типа Сиэтл или подобной с сечением по линии 27-27.
Фиг.27 - вид сбоку протезной стопы, показанной на фиг.26.
Фиг.28 - вид сбоку протезной стопы, соответствующей другому варианту осуществления изобретения.
Фиг.29 - вид в перспективе с медиальной стороны сверху и спереди другого варианта выполнения левой протезной стопы, соответствующей изобретению.
Фиг.30 - вид сверху протезной стопы, показанной на фиг.29.
Фиг.31 - вид сбоку протезной стопы, показанной на фиг.29 и 30, с медиальной стороны.
Подробное описание вариантов осуществления изобретения
Как показано на чертежах, протезная стопа 1, соответствующая первому примерному варианту осуществления изобретения, содержит корпус 2, сформированный из упругого полужесткого материала, пластмассы в описанном варианте, который сформирован с передней, средней и задней частями 2А, 2В и 2С стопы соответственно. Корпус 2 окружает косметическое покрытие 3 стопы, как показано на фиг.2. Корпус 2 в описанном варианте осуществления изобретения сформирован посредством формования или заливки материала корпуса в негативную форму. Однако для формирования корпуса 2 могли бы использоваться другие способы, такие как механическое изготовление корпуса из цельного куска упругого полужесткого материала или посредством использования, например, комбинации формования и механической обработки. Пластмасса корпуса 2 представляет собой эластомер, в показанном примере полиуретан, но могли бы использоваться другие пластмассы или композиционные материалы. Корпус 2 стопы конфигурирован и сконструирован для имитации движения заднего отдела человеческой стопы в трех плоскостях, переднего отдела стопы в двух плоскостях и способности движения заднего отдела стопы, среднего отдела стопы и переднего отдела стопы с ровными динамическими характеристиками, как здесь описано.
Способность движения заднего отдела стопы в трех плоскостях достигается благодаря задней части 2С стопы, которая включает первое и второе соединения 4 и 5, допускающие движение протезной стопы при ходьбе по замкнутой кинетической схеме. Первое соединение 4 действует как голеностопный сустав. Второе соединение 5 действует как подтаранный сустав. Ось 4А поворота голеностопного соединения ориентирована так, что она допускает движение задней части 2С стопы вокруг оси 4А соединения, по меньшей мере, большей частью в сагиттальной плоскости. Более конкретно, ось 4А голеностопного соединения предпочтительно повернута наружу на угол α, составляющий от 8° до 30°, от линии, проведенной под прямым углом к продольной оси Х-Х стопы, см. фиг.4. Ось 4А голеностопного соединения также отклоняется от поперечной плоскости на угол β составляющий 8° так, что медиальная часть более проксимальна, чем латеральная, см. фиг.6. Эта ориентация оси поворота голеностопного соединения позволяет протезной стопе имитировать способность движения голеностопного сустава человеческой стопы в сагиттальной и фронтальной плоскостях.
Движение по разомкнутой кинетической схеме не может происходить в протезной стопе, поскольку отсутствует мускульное управление. Однако при движении по замкнутой кинетической схеме возникает тыльное сгибание с абдукцией при движении ноги на стопе вперед с поворотом ноги внутрь. Сгибание подошвы с аддукцией происходит при движении ноги на стопе назад с поворотом ноги наружу. Силы реакции опоры создают эти движения при помощи протезной стопы 1.
Голеностопное соединение 4 и подтаранное соединение 5 сформированы как единое целое с задней частью 2С стопы при помощи соответствующих стоек 4В и 5В из упругого материала задней части стопы. Каждая стойка удлинена по направлению ее соответствующей оси соединения. Поверхности передней и задней сторон стойки 4В голеностопного соединения и поверхности медиальной и латеральной сторон стойки 5В подтаранного соединения вогнуто изогнуты для передачи и поглощения сил при движении задней части стопы вокруг осей голеностопного и подтаранного соединений. Вогнуто изогнутая поверхность передней стороны стойки 4В сформирована периферией отверстия 6, которое проходит сквозь заднюю часть 2С стопы вдоль передней стороны стойки 4В. Диаметр d1 отверстия 6 в стопе 1 составляет 5/8 дюйма, но он может изменяться в зависимости от общего размера корпуса 2 стопы 1.
Спереди от отверстия 6 находится прорезь 7, которая допускает движение задней части 2С стопы вокруг оси 4А соединения. Ширина 8 прорези 7 подобрана таким образом, что нижняя поверхность корпуса 2, примыкающая к прорези 7, служит стопором для противоположной верхней поверхности, ограничивающей прорезь, для ограничения величины движения задней части 2С стопы вокруг оси 4А голеностопного соединения при тыльном сгибании. Чем шире передняя прорезь, тем больше потенциал диапазона движения при тыльном сгибании. Отверстие 6 в показанном варианте осуществления изобретения проходит в направлении, параллельном оси 4А соединения.
Задняя сторона стойки 4В голеностопного соединения задней части 2С стопы представляет собой вогнутую поверхность, имеющую диаметр d2, составляющий 1,5-2 дюйма в примерном варианте осуществления изобретения, но он может изменяться и определяется общим размером корпуса 2. Например, для стопы для младенца или маленького ребенка диаметр d2 может быть меньшим. Проксимальная сторона вогнутой поверхности 9 предпочтительно проходит в направлении, параллельном оси 4А голеностопного соединения. Дистальная сторона вогнутой поверхности 9 может проходить в направлении, параллельном оси 4А голеностопного соединения, или проходит в направлении, параллельном фронтальной плоскости. Эта кривизна необходима для поглощения ударов и предоставления большего диапазона движения в голеностопном соединении при сгибании подошвы. Для создания способности движения в голеностопном соединении ширина w и толщина t пластмассовой голеностопной стойки 4В, см. фиг.7, могут изменяться в зависимости от плотности, жесткости и других характеристик используемого материала. Например, протезная стопа протеза выше колена требует характеристик движения, отличных от характеристик протезной стопы протеза ниже колена.
В области протезирования хорошо известно, что пяточный рычаг создает сгибающий момент и что носочный рычаг создает разгибающий момент. Вследствие этого требования по подвижности для протезной стопы протеза выше колена и протеза ниже колена разные. В результате протезная стопа протеза выше колена может иметь другой радиус кривизны вогнутой поверхности заднего голеностопного соединения, и оно может быть сформировано из менее жесткого материала. Это фактически может уменьшать пяточное рычажное действие и связанный с ним результирующий сгибающий момент. Ось 4А голеностопного соединения в проекции на сагиттальную плоскость отклонена от поперечной плоскости на угол 9, при этом передняя часть более проксимальна, чем задняя часть, см. фиг.8. Угол θ в данном варианте осуществления изобретения аналогичен углу β на фиг.6 и составляет 8°.
Подтаранное соединение 5 в протезной стопе 1 размещено ниже и проходит в направлении, отличном от направления голеностопного соединения 4. Ось 5А подтаранного соединения проходит вдоль стойки 5В подтаранного соединения и ориентирована для обеспечения движения задней части 2С стопы вокруг оси 5А соединения во всех трех из фронтальной, поперечной и сагиттальной плоскостей, хотя преимущественно во фронтальной и поперечной плоскостях. Ось 5А соединения проходит в задней части 2С стопы от задней плантарной и латеральной части к передней дорсальной и медиальной части. Предпочтительно ось 5А соединения в проекции на поперечную плоскость отклонена на угол Δ1, составляющий от 9° до 23°, от продольной оси Х-Х стопы, как показано на фиг.4. В примерном варианте осуществления изобретения угол Δ1 составляет 23°. Ось 5А соединения в проекции на сагиттальную плоскость (наклонную к оси соединения 5) при взгляде по направлению стрелки В на фиг.1 образует угол Ψ, составляющий от 29° до 45° относительно поперечной плоскости, см. фиг.9. В описанном варианте осуществления изобретения угол Ψ составляет 30°.
Подтаранное соединение 5 ограничено с медиальной и латеральной сторон соответствующими отверстиями 10 и 11, которые проходят параллельно оси 5А соединения. Диаметр d3 отверстий может изменяться в зависимости от общего размера корпуса 2. В примерном варианте осуществления изобретения он составляет 3/16 дюйма. Вдоль подтаранного соединения снаружи от отверстий 10, 11 проходят медиальная и латеральная прорези 12 и 13 соответственно к периферии корпуса 2 стопы для обеспечения движения задней части 2С стопы вокруг оси 5А подтаранного соединения. Ширина 14 медиальной прорези 12 и ширина 15 латеральной прорези 13 подобраны так, что нижняя поверхность задней части 2C стопы, ограничивающая каждую прорезь, действует как стопор для противоположной верхней поверхности, ограничивающей прорезь, для ограничения величины сгибания или поворотного движения задней части стопы вокруг оси 5А соединения при вывороте и инверсии при ходьбе. Предпочтительно, ширина медиальной прорези 14 превышает, например, в два раза ширину латеральной прорези 15. В примерном варианте осуществления изобретения ширина 14 составляет 1/8 дюйма, а ширина 15 составляет 1/16 дюйма. Ось 5А соединения в проекции на фронтальную плоскость при взгляде по направлению стрелки А на фиг.2 наклонена на угол ω относительно поперечной плоскости, при этом медиальная сторона более проксимальна, чем латеральная, см. фиг.10.
Ось 5А поворота подтаранного соединения в протезной стопе 1 имитирует действие подтаранного сустава человеческой стопы. Важность продольной оси 5А поворота соединения 5, ориентированной наружу на 9-23° от продольной оси стопы, состоит в обеспечении способности движения в медиальном и латеральном направлениях или во фронтальной плоскости. Величина возможного движения во фронтальной плоскости протезной стопы в соединении 5 определяется шириной медиальной и латеральной прорезей 14 и 15 подтаранного соединения. Поскольку человеческая стопа в типичном случае имеет диапазон способности движения от инверсии на 20° до выворота на 10° вокруг подтаранного сустава человеческой стопы, медиальная прорезь 14 протезной стопы 1 предпочтительно имеет ширину, в два раза превышающую ширину латеральной прорези 15, для обеспечения большего диапазона инверсии, чем выворота.
Кривизна на медиальной и латеральной сторонах стойки 5В, создаваемая отверстиями 10 и 11, предотвращает разрушение пластмассы благодаря уменьшению концентрации напряжений. Косоугольная ось поворота подтаранного соединения, см. фиг.9, обеспечивает действие соединения как шарнира со скосом 45°. Получен простой преобразователь момента, и поворот ноги или вертикального сегмента, соединенного со стопой 1, будет приводить к почти равному повороту (в случае, когда угол Ψ составляет 45°) горизонтального сегмента. Эта ориентация будет улучшать способность движения в поперечной и фронтальной плоскостях. Когда угол Ψ косоугольной оси подтаранного соединения 5 составляет 30° вместо 45°, ось в два раза ближе к горизонтальной плоскости, чем к вертикальной плоскости, и в два раза большее движение стопы происходит во фронтальной плоскости, чем в поперечной плоскости, при заданном повороте ноги вокруг ее продольной оси. Важность способности движения в поперечной плоскости в подтаранном соединении 5 состоит в поглощении момента в поперечной плоскости для уменьшения поперечных сил, действующих в соединении остаточной конечности с гнездом, и для устранения необходимости в добавлении отдельного поглотителя момента в протезную стопу.
Средняя величина поворота в поперечной плоскости ноги человека при ходьбе составляет 19°. Подтаранный сустав представляет собой механизм в человеческой стопе, а также в протезной стопе 1, который допускает этот поворот на 19°. Движение по замкнутой кинетической схеме подтаранного соединения 5 в стопе 1 остается инверсией с супинацией и выворотом с пронацией во фронтальной плоскости. Функциональный диапазон движения подтаранного соединения при ходьбе составляет 6° совокупного движения. В случае, когда всего 6° совокупного движения во фронтальной плоскости требуется в протезной стопе 1, можно отклонить косоугольную ось соединения 5 к верхнему концу диапазона 30-45° для получения выгоды от комфорта.
Задняя часть 2С стопы 1 также снабжена пяткой 16 с задним латеральным углом 17, который является более задним и латеральным, чем медиальный угол пятки, для содействия вывороту задней части стопы в начальной фазе контакта при ходьбе. Как показано на фиг.4 и 5, задняя сторона пятки 16 представляет собой торсион в форме утиного хвоста с латеральным задним углом 17, смещенным на расстояние l1, составляющее от 1/2 до 3/4 дюйма, дальше назад, чем медиальный угол. Использование меньшего угла Δ, составляющего, например, 16°, или более медиальное расположение стойки 5В подтаранного соединения, как описано ниже, также вызывает смещение угла 17 пятки на расстояние l2, составляющее 1/2 дюйма, более латерально, чем проецированная ось подтаранного соединения. Это латеральное смещение на 1/2 дюйма предопределяет то, что задняя часть стопы при ударе пяткой вызывает выворот подтаранного соединения. Этот выворот подтаранного соединения при первоначальном контакте действует как поглотитель удара для демпфирования удара пяткой. Кроме того, задний латеральный угол стопы в сагиттальной плоскости имеет изогнутую вверх форму, см. фиг.2 и 3, с радиусом кривизны, составляющим в описанном варианте осуществления изобретения от 1,5 до 3 дюймов. Этот радиус кривизны может изменяться в зависимости от общего размера стопы. Этот большой радиус кривизны позволяет заднему латеральному углу отклоняться в проксимальном направлении при ударе пяткой, что также способствует поглощению ударов. Плотность пластмассы на задней стороне корпуса 2 стопы 1 также можно подбирать так, чтобы она была меньше плотности в остальной части корпуса стопы, для создания еще большей способности поглощать удары.
Верх 23 задней части 2С протезной стопы 1 плоский и имеет металлическое крепежное устройство 18, заделанное в пластмассу. Металлическое устройство 18 выполнено из нержавеющей стали в стопе 1, но могут использоваться и легкие металлические сплавы, такие как титановые сплавы. Устройство 18 обеспечивает прикрепление протезной стопы к компоненту 24 протеза, прикрепляемому к конечности человека над стопой, как схематически показано на фиг.2. Нижняя часть 19 крепежного устройства 18 заделана в материал задней части 2С стопы в ходе формования. Предпочтительно эта нижняя часть 19 имеет несколько проходящих сквозь него отверстий для закрепления устройства в формованном эластомере корпуса 2 при формовании. В описанном примерном варианте осуществления изобретения крепежное устройство содержит верхнюю пирамидную крепежную пластину 20, соединенную с промежутком с нижней крепежной пластиной 19 множеством крепежных средств 21, как показано на чертежах. В альтернативном варианте верхняя и нижняя крепежные пластины и соединительные элементы могут быть сформированы как единое целое, как показано на фиг.14. Крепежное устройство 18 расположено в задней части 2С стопы вдоль продольной оси Х-Х стопы 1, как показано на чертежах.
Металлическое крепежное устройство 18', показанное на фиг.14, содержит сформированные как единое целое нижнюю крепежную пластину 19', верхнюю пирамидную крепежную пластину 20' и соединительные стойки 21'. Нижняя пластина 19' сформирована с 1/8-дюймовым отклонением 41 в проксимальном направлении на переднем лепестке и медиальным и латеральным смещениями 42 и 43 соответственно. Медиальное и латеральное отверстия 44 и 45 и переднее и заднее отверстия 46 и 47 содействуют закреплению устройства в пластмассовом корпусе 2 в ходе формования. Линия С-С, проходящая через отверстия 44 и 45, повернута на 8-30° наружу от перпендикуляра к сагиттальной плоскости Х-Х, при этом медиальная часть выдвинута дальше вперед, чем латеральная. Предпочтительно линия С-С смещена назад на расстояние X' от средней или равной ориентации D-D таким образом, что отверстия 44 и 45 находятся в середине стойки 4В оси голеностопного соединения. Смещение назад отверстий 44 и 45 совместно с задним отверстием 47 противоположны длине носочного рычага. Эти признаки можно также использовать на устройстве 18, где крепежные средства соединяют отдельные верхнюю и нижнюю крепежные пластины 20 и 19.
Дорсальная поверхность средней части 2В стопы спереди от прорези 7 сформирована с дорсальной выемкой 25, которая допускает тыльное сгибание средней части 2В стопы и передней части 2А стопы, когда при ходьбе передним частям протезной стопы передается нагрузка. На дорсальной поверхности средней части 2В стопы спереди с медиальной стороны относительно дорсальной выемки 25 сформирована выпуклость 26 метатарзальной дуги. Кроме того, дорсальная сторона средней части 2В стопы и передней части 2А стопы сформирована с выемкой 27, которая имитирует в действии пятую лучевую ось движения человеческой стопы. См. разные штриховки на фиг.11, показывающие расположение выемок 25 и 27 и выпуклости 26 на дорсальной поверхности корпуса 2. Выемка 27 имеет продольную ось Y-Y, ориентированную под углом Y, составляющим 35° к продольной оси Х-Х стопы, при этом медиальный конец находится спереди от латерального для имитации в действии пятой лучевой оси движения при ходьбе как косоугольной оси поворота пониженной передачи второй-пятой костей плюсны в человеческой стопе. Угол γ может быть меньше 35°, но предпочтительно находится в пределах от 15° до 35°.
Подошвенная поверхность корпуса 2 стопы 1 имеет продольный свод 28, см. фиг.12, который вблизи местоположений, соответствующих ладьевидной кости медиальной части и основанию четвертой кости плюсны латеральной части человеческой стопы, включает выемку 29, продольная ось которой ориентирована перпендикулярно оси Z-Z, первой лучевой оси движения в человеческой стопе, для имитации ее функций, см. фиг.12, при этом местоположение выемки показано штриховкой, добавленной на изображение подошвенной поверхности корпуса 2 стопы 1. Ось Z-Z в примерном варианте осуществления изобретения проходит под углом ∑, составляющим 45° к продольной оси Х-Х стопы, при этом медиальная часть находится сзади от латеральной. Угол ∑ может быть меньше 45°, но предпочтительно он находится в пределах 30-45°. Использование для углов γ и ∑ значений нижнего конца указанных диапазонов будет уменьшать разность между принципами повышенной и пониженной передач. Последний может использоваться, например, для высокоактивных людей с ампутированной стопой. Подошвенная поверхность стопы 1 в передней части выемки продольного свода также включает в целом кольцевую выемку метатарзальной дуги или чашеобразный район 30, очерчивающий заднюю поверхность контактного района подошвенной поверхности переднего отдела стопы, который показан ссылочной позицией 31 на фиг.12. Контактный район заднего отдела стопы обозначен ссылочной позицией 31'.
Сам продольный свод 28 сформирован с выемкой, имеющей продольную ось А-А, см. фиг.12, которая в проекции на фронтальную плоскость отклоняется на угол Е, составляющий от 25° до 42°, см. фиг.13, при этом медиальный конец выше латерального для создания способности движения во фронтальной и сагиттальной плоскостях, как в случае со средними предплюсневыми суставами в человеческой стопе. Медиальная сторона 32 выемки продольного свода имеет больший радиус и более проксимальна, чем латеральная сторона 33 выемки. Передняя сторона выемки продольного свода имеет продольную ось В-В, ориентированную под углом η, составляющим 35°, к продольной оси Х-Х стопы, при этом медиальный конец находится спереди от заднего. Средняя часть выемки продольного свода имеет продольную ось А-А, ориентированную перпендикулярно продольной оси Х-Х стопы.
Продольный свод 28 имеет трехмерную веерообразную форму для получения специфических результатов движения стопы при ходьбе. Передняя выемка продольного свода сочетается с первой лучевой и плюсневой выемками 29 и 30. Это сочетание форм вызывает более переднюю и медиальную ориентацию передней выемки продольного свода для улучшения динамической характеристики повышенной передачи корпуса 2. Задняя сторона выемки продольного свода имеет продольную ось С-С, отклоненную на угол k, составляющий 30° к фронтальной плоскости, при этом медиальная сторона находится сзади от латеральной, см. фиг.12.
Средняя часть 2В стопы сформирована из полужесткого материала, как отмечено выше, и продольный свод 28 упругого корпуса 2 конфигурирован для создания динамических характеристик стопы при ходьбе таким образом, что медиальная сторона 32 продольного свода имеет относительно более высокие динамические характеристики, чем латеральная сторона 33 продольного свода. Благодаря этому и указанным выше признакам стопы 1 существует потенциал движения в двух плоскостях в средней части 2В стопы, соответствующего движению в среднем районе предплюсны человеческой стопы, где движение происходит во фронтальной и сагиттальной плоскостях, что позволяет иметь уклон подошвы передней части стопы при соответствии положениям задней части стопы при ходьбе. Косоугольные оси средней части 2В стопы супинируются при движущей фазе ходьбы. Эффект спокойствия подошвенного апоневроза, активируемого при подъеме пятки, содействует супинации этих косоугольных осей при движении. Только 4-6° движения во фронтальной плоскости требуется при ходьбе для сохранения уклона подошвы. Физические свойства протезной стопы, а также формы ее поверхностей диктуют результаты потенциала движения. Район продольного свода протезной стопы 1 конфигурирован специально для достижения превосходных результатов функционального движения. Отклонение продольного свода от сагиттальной плоскости, как описано выше, улучшает движение стопы 1 во фронтальной плоскости и ее динамические характеристики.
Проксимальная секция средней части 2В стопы выполнена в плоской форме для приема сил при остановке тыльного сгибания переднего голеностопного соединения у прорези 7. Средняя часть 2В стопы толще передней части 2А стопы. Медиальная сторона 32 и 26 средней части стопы толще, чем латеральная сторона 33 и 27. Низ стопы 1 выполнен для соответствия пяткам высотой 3/8 дюйма или 3/4 дюйма. Подошвенная поверхность корпуса 2 в районе соединения передней части стопы и средней части стопы имеет плюсневую выемку или чашеобразный район 30, как указано выше. Чашеобразный район действует для создания контакта на внешних кромках чашки. Возвышенный район 31 проходит параллельно пятой лучевой оси Y-Y движения, см. фиг.11.
Передняя часть 2А стопы корпуса 2 имеет два компенсационных паза 34 и 35, прорезанных в направлении заднего конца передней части стопы. Медиальный компенсационный паз 34 проходит в продольном направлении немного за заднюю точку контакта с грунтом на подошвенной поверхности средней части стопы в чашеобразную углубленную область 30, где он заканчивается отверстием 36 компенсационного паза. Латеральный компенсационный паз 35 проходит дальше назад в переднюю часть стопы, чем медиальный компенсационный паз 34, где он заканчивается отверстием 37 компенсационного паза. В результате два компенсационных паза действуют как повышенная и пониженная передачи в человеческой стопе. Как видно на фиг.12, прямая линия В-В, соединяющая два отверстия 36 и 37 расширяющихся пазов, отклоняется на угол η, составляющий 35°, наружу от длинной оси стопы. Поскольку расстояние от голеностопного соединения до косоугольной оси В-В короче на латеральной стороне, чем на медиальной стороне, эта ось используется сначала при подъеме пятки до перехода к функции высокой передачи. Действие отталкивания через сторону повышенной передачи или медиальную сторону приводит к пронации положения от передней части стопы к задней части стопы и увеличению нагрузки, удерживаемой под медиальной передней частью стопы. Таким образом, передняя часть 2А стопы действует, допуская движения передней части стопы в двух плоскостях.
Более конкретно, компенсационные пазы 34 и 35 одновременно позволяют передней части стопы совершать тыльное сгибание и инверсию и подошвенное сгибание и выворот. Эта способность движения в двух плоскостях сохраняет уклон подошвы передней части стопы на неровной местности. Стопа 1 имитирует в этом отношении человеческую стопу. Когда задняя часть 2С стопы изменяет положение, передняя и средняя части стопы должны изменить положение в противоположном направлении. Это противоскручивание сохраняет уклон подошвы стопы.
Протезная стопа 1, которую носит человек с ампутированной конечностью, действует как устройство с замкнутой кинетической схемой, которое реагирует на силы, создаваемые опорой при ходьбе человека. В фазе первоначального контакта при ходьбе задняя латеральная часть пятки ударяется об опору. Конструкция задней латеральной пяточной области имеет смещение, как описано выше, для передачи нагрузки через удлинение в форме утиного хвоста, которое отклоняется вверх для поглощения сил пяточного рычага, которые создают сгибающий момент, воздействующий на голень. Дополнительное усовершенствование этих характеристик поглощения момента и поглощения ударов стопы 1 обеспечиваются задней выемкой 9 и латеральным смещением l2 пятки к оси поворота подтаранного соединения 5 таким образом, что при приложении силы подтаранное соединение выворачивается. Этот выворот действует как поглотитель ударов для демпфирования передачи нагрузки в фазе первоначального контакта при ходьбе. Кроме того, приложение силы происходит сзади от оси 4А поворота протезного голеностопного соединения 4, что вызывает сгибание подошвы голеностопным соединением и опускание на опору средней части 2В стопы и передней части 2С стопы.
Что касается несущих вес опорных поверхностей 31 и 31' стопы, показанных на фиг.12, когда нагрузка передается вперед от пяточной части к передней части стопы во всей фазе установки положения при ходьбе, силы реакции опоры толкают подошвенную поверхность протезной стопы 1. Когда нагрузка передается через заднюю часть 2С стопы, подтаранное соединение 5 допускает движение в стопе 1, которое соответствует трем кардинальным плоскостям движения человека, а именно поперечной, фронтальной и сагиттальной плоскостям. Эта способность движения в трех плоскостях достигается благодаря ориентации оси 5А поворота подтаранного соединения протезной стопы, которая отклонена от поперечной, фронтальной и сагиттальной плоскостей, как описано выше. Эта ориентация обеспечивает способность движения в трех плоскостях. Компонент в сагиттальной плоскости меньше компонентов во фронтальной и поперечной плоскостях. Уменьшенное движение подтаранного соединения 5 в сагиттальной плоскости компенсируется голеностопным соединением 4, которое расположено непосредственно с проксимальной стороны от подтаранного соединения.
Способность подтаранного соединения допускать движение в поперечной плоскости имеет большое значение, поскольку в фазе установки положения при ходьбе нижняя конечность, большей частью при помощи подтаранного соединения, должна поглощать 19° движения в поперечной плоскости, передаваемого через большеберцовую кость и малоберцовую кость голеностопному соединению и затем подтаранному соединению. Подтаранное соединение 5 действует как шарнир со скосом 45° и передает это движение в заднюю и среднюю части 2С и 2В стопы. Это движение поглощается качествами динамических характеристик среднего отдела стопы и способностями движения в двух плоскостях среднего и переднего отделов стопы. В результате достигаются улучшенные характеристики нагрузки на подошвенную поверхность. До того, как стопа стоит ровно в фазе установки положения при ходьбе, поскольку линия передачи нагрузки проходит вперед в стопе и приближается к голеностопному соединению 4, силы опорной реакции грунта вызывают подошвенное сгибание голеностопного соединения, пока вся стопа не войдет в контакт с опорой. Это движение с подошвенным сгибанием достигается благодаря дополнительному расширению или раскрытию передней прорези 7 голеностопного соединения и сжатия задней выемки 9 голеностопного соединения.
Когда стопа 1 расположена ровно на опоре, нагрузка передается голеностопному соединению 4. Когда передача нагрузки перемещается далее вперед в стопе, передняя прорезь 7 для тыльного сгибания смыкается, и дальнейшее тыльное сгибание прекращается. То есть, движение останавливается противоположными поверхностями, ограничивающими переднюю прорезь голеностопного соединения, которые сходятся друг с другом. Чем больше прорезь 7, тем больше потенциал движения при тыльном сгибании. Прекращение передачи нагрузки переднему голеностопному соединению у прорези 7 имеет большое значение. Таким образом, нагрузка передается в среднюю часть 2В стопы 1. Вследствие этого область продольного свода 28 стопы 1 подвергается нагрузке, и она реагирует расширением вогнутости и поглощением этих вертикальных сил. Результатом является повышение качеств поглощения ударов и динамических характеристик.
Проксимальная медиальная область продольного свода имеет значительно больший радиус, чем латеральный дистальный. Вследствие этого медиальная область имеет увеличенный потенциал расширения и более высокие динамические характеристики, чем дистальная латеральная продольная выемка свода. Когда передача нагрузки продвигается дальше вперед в протезной стопе 1, приближаясь к медиальной стороне первой лучевой продольной оси Z-Z поворота, показанной на фиг.12, передача нагрузки приближается к срединной фронтальной плоскости стопы.
Подошвенная и дорсальная поверхности протезной стопы устроены так, что они допускают возникновение специфических движений или содействуют им. Более конкретно, первая лучевая ось Z-Z поворота и способность движения, связанная с этой осью в человеческой стопе, имитируются в протезной стопе 1 подошвенной поверхностью передней части 2А, имеющей форму выемки 29. Продольная ось Z-Z выемки 29 ориентирована так, что она параллельна продольной оси поворота первого луча в человеческой стопе. Эта ориентация повернута на 45° внутрь к продольной оси стопы, см. угол ∑ на фиг.12.
Результирующее движение при приложении силы к этой выемке и ее специфическая угловая ориентация дают поглощение вертикальных ударов и улучшенные динамические характеристики. Первая лучевая выемка 29, а также выемка 28 продольного свода создают динамические характеристики. Эти динамические характеристики демонстрируются передачей нагрузки от сил реакции опоры сторонам выемок и расширением выемок. Таким образом, в протезной стопе при ходьбе возникает расширение выемки, и, когда действие силы прекращается, стопа 1 упруго возвращается к ее первоначальной форме, освобождаясь от полученной энергии.
Голеностопное и подтаранное соединения 4 и 5 протезной стопы 1 также имеют потенциал для создания динамических характеристик. Например, когда голеностопное соединение 4 осуществляет сгибание подошвы и передняя прорезь 7 для тыльного сгибания расширяется, а задняя выемка 9 сжимается, стойка 4В голеностопного соединения принимает энергию. Стойка 4В будет возвращаться в ее нормальное положение, когда действие вертикальных сил прекращается.
Таким образом, динамические характеристики протезной стопы 1 под действием сил реакции опоры связаны с расширением и сжатием выемок и выпуклостей и в меньшей степени с движением, которое возникает, и с признаками конструкции конкретной стойки соединения. Стойки 4В и 5В составляют срединные точки рычагов класса 1 в задней части 2С стопы. Каждая стойка голеностопного и подтаранного соединений имеет способность накопления энергии. Физические свойства, а также конструктивные характеристики создают динамические характеристики. Приложение силы будет вызывать возникновение движения. Когда действие силы прекращается, физические характеристики стойки возвращают ее в первоначальную исходную форму, и вследствие этого возникают динамические характеристики. Хотя первая лучевая ось и пятая лучевая ось протезной стопы не являются истинными осями соединений, форма и конструкция признаков поверхности корпуса 2 протезной стопы определяют способности функционального движения таким образом, что поощряется создание этих специфических движений, как описано выше.
Взаимосвязь между подошвенной и дорсальной формами средней части стопы существенна для понимания существующих динамических характеристик. В этой области протезной стопы 1 формы медиальной и латеральной поверхностей являются специфическими формами, и эти формы обеспечивают результирующие функциональные движения. При ходьбе латеральная дорсальная пятая лучевая выемка 27 сжимается, обеспечивая потенциал движения с меньшим сопротивлением. Это относится к принципу пониженной передачи. Медиальная подошвенная и дорсальная области поверхности средней части стопы, как описано выше (первый луч в действии), реагируют на приложение силы расширением. Расширение имеет качества усиливающегося сопротивления, и в результате усиливаются динамические характеристики. Эта способность усиления динамических характеристик связана с принципом повышенной передачи.
Принципы повышенной передачи и пониженной передачи относятся к таким компонентам ходьбы, как ускорение, замедление и скорость. Улучшенные динамические характеристики повышенной передачи могут использоваться при ходьбе в фазах ускорения и замедления. Принцип пониженной передачи больше относится к скорости ходьбы, чем к упомянутым выше ускорению и замедлению. Компонент протезной стопы 1, действующий по принципу пониженной передачи, будет позволять человеку с ампутированной стопой передвигаться с меньшими затратами энергии при ходьбе с меньшими скоростями. Это снижение затрат энергии связано с двумя принципами, а именно с длиной носочных рычагов, поскольку эти длины носочных рычагов относятся к разгибающему моменту голени, и с динамическими характеристиками медиального и латерального районов протезной стопы.
Повышенная передача имеет более длинный носочный рычаг, чем пониженная передача. Когда человек с ампутированной стопой идет медленно, создаются меньший момент и инерция. Центр тяжести тела смещается более в латеральную сторону при медленной ходьбе в фазе установки положения при ходьбе. При улучшенной способности движения протезной стопы 1 во фронтальной плоскости голень пациента может быть позиционирована для движения в секции пониженной или повышенной передачи средней части и передней части стопы. Если человек с ампутированной стопой, носящий стопу 1, ускоряется или замедляется, он будет использовать функцию повышенной передачи при достижении комфортабельной скорости ходьбы. Человек с ампутированной стопой будет стремиться использовать область передней части 2А стопы, которая допускает продолжение использования комфортабельной скорости ходьбы. Передача силы будет происходить в более медиальной области, если человек с ампутированной стопой хочет больших динамических характеристик, или в более латеральной области для получения меньших динамических характеристик. С использованием протезной стопы 1 человек с ампутированной стопой имеет выбор вариантов функционального движения.
Улучшенные общие стили ходьбы человека с ампутированной стопой являются результатом такого избирательного управления. Когда передача нагрузки перемещается дальше вперед в протезной стопе 1, ось пятого луча имитируется устройством двух отверстий 36 и 37 компенсационных пазов и формой и конструкцией подошвенной и дорсальной поверхностей корпуса 2 стопы. То есть, дорсальная сторона корпуса 2 у пятой лучевой оси Y-Y поворота сформирована с выемкой 27. Эта выемка содействует возникновению движения перпендикулярно ориентации продольной оси Y-Y. Известно, что при нормальной ходьбе голень, то есть большеберцовая кость и малоберцовая кость, не продвигаются просто в сагиттальной плоскости. Известно, что в среднем положении колено или голень перемещаются в латеральном направлении, и также возникают движения во фронтальной плоскости. Это происходит в человеческом колене из-за бедренной кости.
Важна функция пятой лучевой оси Y-Y поворота стопы 1. Когда нагрузка передается вперед и в латеральном направлении протезной стопе 1, пятая лучевая продольная ось Y-Y допускает возникновение движения, перпендикулярного ориентации ее продольной оси. Кроме того, два отверстия 36 и 37 компенсационных пазов расположены так, чтобы они содействовали движениям передней части стопы, причем они расположены на продольной оси поворота пятого луча и вследствие этого создаются способности движения в двух плоскостях. Указанные выше эффекты пониженной передачи и повышенной передачи также усиливаются. В результате улучшаются характеристики протезной стопы при ходьбе и имитируется нормальная походка человека.
Качества движения в двух плоскостях передней части протезной стопы 1 улучшены благодаря компенсационным пазам и указанным выше отверстиям компенсационных пазов. Два отверстия компенсационных пазов стратегически расположены для создания способностей специфического движения. То есть, два отверстия продольно, в проекции на сагиттальную плоскость, ориентированы под углом b, составляющим 45° к линии В-В, параллельной фронтальной плоскости, см. фиг.2. Эта ориентация действует как шарнир со скосом 45° по существу подобно шарниру со скосом 45° подтаранного соединения. Результатом являются улучшенные способности движения в двух плоскостях.
Опорная поверхность 31 подошвенной поверхности передней части 2А стопы и поверхность 31' задней части 2С стопы также имеют специфические конструкции и формы. Отверстия 36 и 37 компенсационных пазов подошвенной поверхности расположены в области 30 метатарзальной дуги. Вследствие этого, когда нагрузка передается в область стопы 1, эквивалентную головкам костей плюсны, нагрузка приходится на компенсационные опоры 38, 39 и 40. Когда опорная поверхность на подошвенной стороне стопы 1 входит в контакт с опорой, нагрузку несут компенсационные опоры, создающие эффект взвешенной перепонки. Это допускает очень большую степень способности формоизменения при сохранении структурной устойчивости, необходимой для получения устойчивой стопы. При улучшении способности движения передней части протезной стопы в двух плоскостях улучшается походка человека.
Когда передача нагрузки при ходьбе перемещается еще дальше вперед в область компенсационных опор и лучевой район, форма и конструкция протезной стопы 1 создает специфические результирующие движения. Тыльная и подошвенная стороны указанной выше области корпуса 2 имеют форму выступающей вверх дуги, см. фиг.2. Выемка тыльной стороны ориентирована так, что она переходит в выемку 27 пятого луча. Это соединение форм с переходом одной в другую образует плавный переход между конечной фазой установки и фазой размаха при ходьбе. Профилированный вверх лучевой район действует как согнутые в тыльную сторону пальцы стопы в указанной выше последовательности ходьбы.
Хотя протезная стопа, соответствующая изобретению, была описана в связи с первым примерным вариантом осуществления изобретения, возможны альтернативные варианты. Например, существует пространственная взаимосвязь между высотой голеностопного соединения в протезной стопе и тем, как эта высота влияет на потенциальную ориентацию косоугольной оси стойки подтаранного соединения в стопе. В описанном варианте осуществления изобретения высота задней части стопы (от подошвенной поверхности до поверхности пирамидного крепления) составляет 3-3,5 дюйма. Эта высота может быть большей, и ориентация голеностопного соединения может быть смещена больше в проксимальном направлении. Эта альтернативная ориентация голеностопного соединения допускает приближение косоугольной оси подтаранного соединения и изменение от 29-30°, например, до угла 42-45°. Ориентация под углом 30° в описанном варианте осуществления изобретения обеспечивает увеличенные инверсию и выворот (движение во фронтальной плоскости) и уменьшенные абдукцию и аддукцию (движение в поперечной плоскости). В альтернативном варианте с более проксимальным расположением голеностопного соединения косоугольная ось подтаранного соединения под углом 45° будет допускать одинаковые движения в поперечной и фронтальных плоскостях. Результирующий эффект этой последней ориентации может состоять в уменьшении инверсии/выворота при движении во фронтальной плоскости и увеличении абдукции и аддукции стопы по сравнению со стопой в примерном варианте осуществления изобретения. Этому увеличению абдукции и аддукции могут оказывать сопротивление силы опорной реакции грунта и, как следствие, может происходить уменьшение способностей инверсии и выворота и увеличение движений в поперечной плоскости.
Другим возможным вариантом может быть большее смещение стойки подтаранного соединения в медиальном направлении в стопе 1 и, таким образом, увеличение латерального смещения l1, см. фиг.4. Это может предопределять увеличенный выворот подтаранного соединения в фазе первоначального контакта при ходьбе. Результирующим эффектом может быть улучшение способностей поглощения ударов. Кроме того, ориентация двух отверстий компенсационных пазов в сагиттальной плоскости может быть изменена относительно той, которая показана в первом варианте осуществления изобретения. Эти отверстия могут отклоняться в медиальном или латеральном направлениях во фронтальной плоскости. Результатом ориентации не в сагиттальной плоскости этих двух отверстий является получение компенсационных пазов и компенсационных опор, которые движутся в более медиальном и латеральном направлениях. Например, если дорсальные концы двух отверстий компенсационных пазов отклоняются на 20-30° от сагиттальной плоскости, три компенсационные опоры при воздействии на них сил реакции опоры предопределяют содействие тыльному сгибанию и аддукции. Ориентация дорсальной стороны отверстий компенсационных пазов, отклоненная на 20-30° в медиальную сторону от сагиттальной плоскости, может содействовать тыльному сгибанию и абдукции опор. Кроме того, можно ориентировать два отверстия компенсационных пазов таким образом, чтобы одно отверстие было отклонено в медиальном направлении, а другое отверстие было отклонено в латеральном направлении. Например, дорсальная сторона отверстия латерального компенсационного паза могла бы отклоняться в медиальном направлении от сагиттальной плоскости на 35°. Эта ориентация будет предопределять более легкое движение латеральной компенсационной опоры в тыльное сгибание и абдукцию, то есть для получения улучшенного эффекта пониженной передачи. Дорсальная сторона медиального отверстия компенсационного паза могла бы отклоняться на 45° в латеральную сторону от сагиттальной плоскости. Эта ориентация может предопределять движение медиальной компенсационной опоры в направлении тыльного сгибания и аддукции. Результирующий эффект состоит в улучшении способности движения медиальной компенсационной опоры, когда ее движение относится к эффекту повышенной передачи.
Другой альтернативный вариант выполнения протезной стопы предусматривает наличие одного компенсационного паза и отверстия компенсационного паза таким образом, что формируют только медиальную и латеральную компенсационные опоры. Это может повышать жесткость передней части стопы и уменьшать способности ее движения в двух плоскостях. Как описано выше, эта конструкция с одним отверстием компенсационного паза могла бы отклоняться от сагиттальной плоскости, как описано. Компенсационный паз или пазы также могли бы быть расположены в пяточном районе стопы для улучшения установки подошвенной поверхности пятки с расположением подошвы под уклоном на неровных поверхностях. Голеностопное соединение также могло бы двигаться под подтаранным соединением в протезной стопе. Это может допускать увеличение отклонения подтаранного соединения без вредного влияния на общую высоту стопы, то есть на выгоду низкопрофильного варианта протезной стопы.
Корпус 2 протезной стопы 1 может также формоваться как стопа гибридного типа с использованием материалов с разными плотностями и твердостями в передней и средней частях 2А и 2В стопы, а также в задней части 2С стопы. Физические свойства, а также конструкционные характеристики стопы создают ее динамические характеристики.
Протезная стопа 50, соответствующая второму примерному варианту осуществления изобретения, показана на фиг.28. Протезная стопа 50 содержит голеностопное устройство, например голеностопную стойку 51, соответствующую настоящему изобретению, которую прикрепляют к обычной низкопрофильной протезной стопе 52 типа Сиэтл или подобной для улучшения функциональных характеристик задней части стопы. Голеностопная стойка имеет Т-образную гайку 53 (см. фиг.23-25), заделанную ее дистальным концом для прикрепления стойки к килю 54 стопы 52 при помощи болта 55. Болт проходит сквозь ступенчатое отверстие 56 в киле стопы и косметическое покрытие 57 стопы 52.
Форма и функциональные характеристики голеностопной стойки подобны описанным относительно задней части 2С протезной стопы 1 в первом примерном варианте осуществления изобретения. При прикреплении к верхней поверхности протезной стопы формируется задняя выемка 58. Как видно на чертежах, также формируется передняя выемка 59 с плавными линиями. Стойка 51 обеспечивает способность движения задней части стопы в трех плоскостях благодаря указанным выше признакам, описанным в связи с задней частью 2С протезной стопы, соответствующей первому примерному варианту осуществления изобретения. Эти признаки включают наличие первого и второго соединений 60 и 61, которые действуют как голеностопный и подтаранный суставы соответственно. Т-образная гайка или подобное крепежное средство заделана в дистальную поверхность упругого пластмассового материала компонента 51 в ходе изготовления.
Протезная стопа 60, соответствующая варианту осуществления изобретения, показанному на фиг.29-31, содержит переднюю часть стопы, среднюю часть стопы и заднюю часть стопы, указанные в описанных выше вариантах осуществления изобретения, см., например, фиг.2, части 2А, 2В и 2С. Задняя часть стопы протеза 60 включает голеностопное соединение 61, допускающее при ходьбе движение протезной стопы по замкнутой кинетической схеме. Голеностопное соединение имеет ось 61А соединения, ориентированную так, что она допускает движение задней части стопы вокруг оси голеностопного соединения, по меньшей мере, большей частью в сагиттальной плоскости. Как и в предшествующих вариантах осуществления изобретения, голеностопное соединение сформировано как единое целое с задней частью стопы при помощи стойки из упругого материала задней части стопы. Сквозь заднюю часть стопы проходит отверстие 62, при этом периферия выемки формирует поверхность передней стороны стойки. Задняя часть стопы спереди от отверстия включает прорезь 63, допускающую движение задней части стопы вокруг оси голеностопного соединения. Отверстие 62, как видно в сечении протезной стопы в сагиттальной плоскости, удлинено вверх таким образом, что образована вертикальная стойка, и его обращенная вперед поверхность выпукло изогнута, см. фиг.31.
Стойка проходит по направлению оси 61А голеностопного соединения и имеет поверхность 64 передней стороны и поверхность 65 задней стороны, которые выпукло изогнуты вперед. Как и в описанных выше вариантах осуществления изобретения, ширина прорези 63 подобрана так, что нижняя поверхность, ограничивающая прорезь, действует как стопор для противоположной верхней поверхности, ограничивающей прорезь, для ограничения величины движения задней части стопы вокруг оси голеностопного соединения при тыльном сгибании. Отверстие 62 проходит в направлении, параллельном оси голеностопного соединения. Выпукло изогнутая вперед стойка предпочтительно обеспечивает дифференциальные свойства при сжатии и растяжении стойки при ходьбе, и совместно с выгнутой вверх упругой стопой протеза она содействует созданию динамических характеристик протеза, имеющих горизонтальный и вертикальный компоненты для улучшения эффективности протеза при использовании.
Протезная стопа 60 имеет известный доступный на рынке переходник 66, соединенный с упругим монолитным корпусом протеза, формирующим стопу и лодыжку, при помощи резьбового крепежного средства 67. Переходник включает элемент 68, имеющий гнездо 69 для приема элемента, который не показан, для разъемного соединения протезной стопы с культей ноги человека с ампутированной стопой. Под элементом 68 расположено основание 70 переходника. Когда резьбовое крепежное средство 67, в верхней части которого находится шестигранное гнездо 71 для приема универсального гаечного ключа для ослабления крепления элемента на основании, незатянуто, элемент может вращаться относительно основания и протезной стопы. Это относительное вращение происходит в поперечной плоскости и позволяет легко сводить и выворачивать носок стопы в критических пределах, например в пределах 1/8 дюйма.
Гнездо 69 элемента 68 представляет собой квадратное гнездо с закругленными углами для приема с зазором квадратного, имеющего соответствующую конфигурацию выступа/элемента на гнезде на нижней конечности или другом компоненте на культе ноги человека с ампутированной стопой. См. штриховые линии на фиг.31. Четыре винта, не обозначенные ссылочными позициями, по одному в середине каждой боковой стенки квадратного гнезда, могут ввинчиваться и вывинчиваться для введения и выведения из зацепления с выступом для соединения протеза с опорной структурой на культе ноги человека с ампутированной стопой. Зазор между выступом и гнездом и регулируемость положений четырех винтов переходника допускают регулирование относительного положения протеза и опорной структуры вперед-назад, медиально-латерально и под углом или с наклоном. Вместо переходника 66 протез 60 может быть снабжен другим известным, доступным на рынке переходником, таким как переходник пирамидного типа, например, показанный на фиг.1-3.
Указанное завершает описание примерного варианта осуществления изобретения и возможных изменений или альтернативных вариантов. Однако следует понимать, что специалисты в данной области техники могут разрабатывать множество других модификаций и вариантов, которые будут соответствовать сущности и объему принципов этого изобретения. Более конкретно приемлемые изменения и модификации возможны в комплектующих деталях и/или устройствах относящегося к делу комбинированного устройства в пределах объема приведенного выше описания, чертежей и прилагаемой формулы изобретения без отхода от сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2345736C2 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2345737C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2289362C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2291676C2 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2348380C2 |
| ПРОТЕЗ СТОПЫ | 2001 |
|
RU2286749C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ | 2002 |
|
RU2294177C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2305516C2 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ И УСОВЕРШЕНСТВОВАННОЙ АМОРТИЗАЦИЕЙ ВЕРТИКАЛЬНОЙ НАГРУЗКИ И УДАРА | 2003 |
|
RU2308910C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2005 |
|
RU2346670C2 |
Изобретение относится к медицинской технике, а именно к протезам стопы. Протезная стопа содержит заднюю часть стопы, среднюю часть стопы и переднюю часть стопы. Задняя часть стопы включает голеностопное соединение, допускающее при ходьбе движение протезной стопы по замкнутой кинетической схеме. Голеностопное соединение имеет ось соединения, ориентированную так, что медиальная часть впереди латеральной, так, что она допускает движение задней части стопы вокруг оси голеностопного соединения, таким образом, что указанное движение осуществляется в сагиттальной и фронтальной плоскостях. Голеностопное соединение сформировано как единое целое с задней частью стопы при помощи стойки из упругого материала указанной задней части стопы. Стойка имеет поверхность передней стороны и поверхность задней стороны, выпукло изогнутые вперед. Сквозь заднюю часть стопы проходит отверстие. Периферия отверстия формирует поверхность передней стороны стойки. Задняя часть стопы спереди от отверстия включает прорезь, допускающую указанное движение задней части стопы вокруг оси голеностопного соединения. Отверстие при взгляде на сечение протезной стопы в сагиттальной плоскости удлинено вверх таким образом, что указанная стойка является вертикальной. Изобретение имитирует человеческую стопу в действии, позволяя человеку с ампутированной стопой иметь нормальную человеческую походку, и улучшает качество жизни человека с ампутированной стопой. 4 н. и 17 з.п. ф-лы, 31 ил.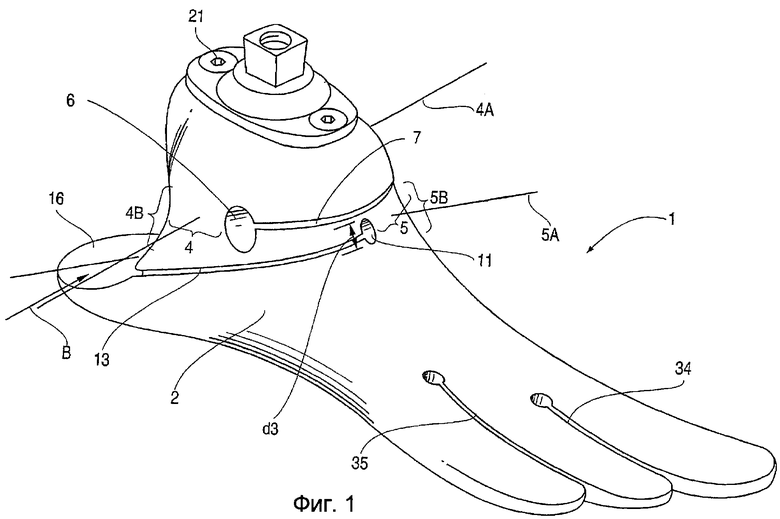
1. Протезная стопа, содержащая заднюю часть стопы, среднюю часть стопы и переднюю часть стопы, причем указанная задняя часть стопы включает голеностопное соединение, допускающее при ходьбе движение протезной стопы по замкнутой кинетической схеме, указанное голеностопное соединение имеет ось соединения, ориентированную так, что медиальная часть впереди латеральной, так, что она допускает движение указанной задней части стопы вокруг указанной оси голеностопного соединения, таким образом, что указанное движение осуществляется в сагиттальной и фронтальной плоскостях, при этом указанное голеностопное соединение сформировано как единое целое с указанной задней частью стопы при помощи стойки из упругого материала указанной задней части стопы, стойка имеет поверхность передней стороны и поверхность задней стороны, выпукло-изогнутые вперед, причем сквозь указанную заднюю часть стопы проходит отверстие, и периферия отверстия формирует поверхность передней стороны указанной стойки, при этом задняя часть стопы спереди от указанного отверстия включает прорезь, допускающую указанное движение указанной задней части стопы вокруг указанной оси голеностопного соединения, и указанное отверстие при взгляде на сечение протезной стопы в сагиттальной плоскости удлинено вверх таким образом, что указанная стойка является вертикальной.
2. Протезная стопа по п.1, в которой указанная стойка проходит по направлению оси голеностопного соединения человека.
3. Протезная стопа по п.1, в которой ширина указанной прорези подобрана так, что нижняя поверхность указанной задней части стопы, ограничивающая указанную прорезь, действует как стопор для противоположной верхней поверхности, ограничивающей указанную прорезь, для ограничения величины указанного движения указанной задней части стопы вокруг указанной оси голеностопного соединения при тыльном сгибании.
4. Протезная стопа по п.1, в которой указанное отверстие проходит в направлении, параллельном указанной оси соединения указанного голеностопного соединения.
5. Протезная стопа по п.1, дополнительно содержащая переходник, соединенный с протезной стопой над голеностопным соединением, причем переходник имеет гнездо для приема элемента для разъемного соединения протезной стопы с культей ноги человека с ампутированной стопой.
6. Протезная стопа по п.5, в которой указанный переходник включает элемент, содержащий указанное гнездо, основание, находящееся под указанным элементом, и разъемное крепежное средство, соединяющее указанный элемент с указанным основанием с обеспечением возможности относительного вращения элемента и основания.
7. Протезная стопа по п.6, в которой указанное относительное вращение элемента, содержащего гнездо, на основании переходника осуществляется в поперечной плоскости.
8. Протезная стопа по п.6, в которой указанный переходник включает регулируемые крепежные средства для изменения положения указанного элемента, вставленного в указанное гнездо.
9. Протезная стопа по п.8, в которой указанный переходник с гнездом и регулируемыми крепежными средствами допускает регулирование относительного положения элемента и протезной стопы вперед-назад, медиально-латерально и с наклоном.
10. Протез, содержащий:
стопу;
лодыжку;
в котором стопа и лодыжка сформированы монолитно как упругий элемент, включающий стойку, которая ориентирована так, что медиальная сторона находится впереди латеральной стороны, стойка формирует голеностопное соединение, допускающее движение по замкнутому кинетическому циклу протеза при ходьбе вокруг оси голеностопного соединения, ориентированной таким образом, что указанное движение осуществляется в сагиттальной и фронтальной плоскостях, причем сквозь указанный упругий элемент проходит отверстие, при этом периферия отверстия формирует поверхность передней стороны указанной стойки, причем указанный упругий элемент спереди от указанного отверстия включает прорезь, допускающую указанное движение вокруг указанной оси голеностопного соединения, и сторона передней поверхности указанной стойки выпукло-изогнута вперед.
11. Протез по п.10, в котором указанное отверстие при взгляде на сечение упругого элемента в сагиттальной плоскости удлинено вверх таким образом, что указанная стойка является вертикальной.
12. Протез по п.10, в котором указанная стойка проходит по направлению оси голеностопного соединения человека.
13. Протез по п.10, в котором ширина указанной прорези подобрана таким образом, что нижняя поверхность указанного элемента, ограничивающая указанную прорезь, действует как стопор для противоположной верхней поверхности, ограничивающей указанную прорезь, для ограничения величины указанного движения вокруг указанной оси голеностопного соединения при тыльном сгибании.
14. Протез по п.10, в котором указанное отверстие проходит по направлению, параллельному указанной оси соединения указанного голеностопного соединения.
15. Протез по п.10, дополнительно содержащий переходник, соединенный с протезом над голеностопным соединением, причем переходник имеет гнездо для приема элемента для разъемного соединения протеза с культей ноги человека с ампутированной стопой.
16. Протез по п.15, в котором указанный переходник включает элемент, включающий указанное гнездо, основание, расположенное под указанным элементом, и разъемное крепежное средство, соединяющее указанный элемент с указанным основанием для получения возможности относительного вращения элемента и основания.
17. Протез по п.16, в котором указанное относительное вращение гнезда, содержащего элемент, на основании переходника осуществляется в поперечной плоскости.
18. Протез по п.15, в котором указанный переходник включает регулируемые крепежные средства для изменения положения указанного элемента, вставленного в указанное гнездо.
19. Протез по п.18, в котором указанный переходник с гнездом и регулируемыми крепежными средствами допускает относительное регулирование элемента и протеза вперед-назад, медиально-латерально и с наклоном.
20. Протезная стопа, содержащая переднюю часть стопы, среднюю часть стопы и заднюю часть стопы, причем указанная задняя часть стопы включает голеностопное соединение, допускающее при ходьбе движение протезной стопы по замкнутой кинетической схеме, указанное голеностопное соединение имеет ось соединения, ориентированную так, что медиальная сторона впереди латеральной для обеспечения движения указанной задней части стопы вокруг указанной оси голеностопного соединения, которое осуществляется в сагиттальной и фронтальной плоскостях, при этом указанное голеностопное соединение сформировано как единое целое с указанной задней частью стопы при помощи стойки из упругого материала указанной задней части стопы, сквозь указанную заднюю часть стопы проходит отверстие, и периферия отверстия формирует поверхность передней стороны указанной стойки, при этом задняя часть стопы спереди от указанного отверстия включает прорезь, допускающую указанное движение указанной задней части стопы вокруг указанной оси голеностопного соединения, при этом указанная стойка и указанное отверстие конфигурированы таким образом, что поверхность передней стороны и поверхность задней стороны указанной стойки выпукло-изогнуты вперед.
21. Протез, содержащий:
стопу;
лодыжку;
в котором стопа и лодыжка сформированы монолитно как упругий элемент, включающий стойку, которая имеет медиальную сторону, находящуюся впереди латеральной стороны, и формирует голеностопное соединение, допускающее движение по замкнутому кинетическому циклу протеза при ходьбе вокруг оси голеностопного соединения, ориентированной таким образом, что указанное движение осуществляется в сагиттальной и фронтальной плоскостях, причем сквозь указанный упругий элемент проходит отверстие, причем периферия отверстия формирует поверхность передней стороны указанной стойки, при этом указанный упругий элемент спереди от указанного отверстия включает прорезь, допускающую указанное движение вокруг указанной оси голеностопного соединения, и в котором указанное отверстие удлинено вверх таким образом, что указанная стойка является вертикальной, и в котором стойка имеет поверхность передней стороны и поверхность задней стороны, выпукло-изогнутые вперед.
| US 6197066 B1, 06.03.2001 | |||
| ИСКУССТВЕННАЯ СТОПА | 1997 |
|
RU2119308C1 |
| ИСКУССТВЕННАЯ СТОПА | 2002 |
|
RU2209611C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТИРИСТОРНОГО ИНВЕРТОРА | 0 |
|
SU331468A1 |
| Устройство для сортировки иголок остриями в одну сторону | 1935 |
|
SU44902A1 |
| КОМБИНИРОВАННЫЙ ВИБРОИЗОЛЯТОР С ВИБРОДЕМПФИРУЮЩЕЙ ПРУЖИНОЙ | 2016 |
|
RU2653327C2 |
| US 4728336 A, 01.03.1988 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 6514293 B1, 04.02.2003. | |||

