Область техники
Настоящее изобретение относится к аппарату для импульсной терапии спинного и верхнешейного отдела позвоночника, позволяющему минимизировать возможность причинения вреда пациенту и одновременно повысить эффективность терапевтического воздействия на пациента за счет обеспечения заранее определенных, точных и повторяемых операций. Общим методом воздействия является передача линейных и вращательных импульсов телу пациента. Эти импульсы формируются преобразователем, который является элементом комплексной системы.
Описание известного уровня техники
В патенте США 4461286, выданном на имя Свита (Sweat), описан вибрационный аппарат, приводимый в действие пусковым элементом. Он способен передавать через упорный палец один импульс, усилие которого накапливается в пружине. Пружина и упорный палец размещены в ручном аппарате. Врач вручную позиционирует как место, так и направление ручного аппарата. Важными элементами этого аппарата для импульсной терапии спинного и верхнешейного отдела позвоночника являются положение точки контакта на теле пациента и направление упора.
Хотя в патенте Свита предусмотрена некоторая степень регулировки и повторяемости импульса, передаваемого в организм, он имеет ряд недостатков.
Сила импульса зависит от энергии, удерживаемой в пружине, определяемой модулем упругости, и она будет смещаться в течение времени в таком механическом устройстве, как пружина. В патенте США 4841955, выданном на имя Эванса (Evans), используются соленоиды, и предложено средство для повышения точности и повторяемости импульсных сил. В обоих этих ручных аппаратах (РА) точный угол упора определяется вручную и не может быть точным или повторяемым. И, наконец, в патентах Свита и Эванса можно передавать всего один импульс и не предусмотрена обратная связь относительно регулировки направления.
В патенте США 4549535, выданном на имя Винга (Wing), описано формирование множества импульсов с помощью электрического двигателя в совокупности с соленоидами. Предусмотрена регулировка ширины, частоты и амплитуды импульсов, однако использование двигателя и соленоидов предполагает некоторую неточность. Общий сигнал f(t), описанный в патенте Винга, имеет прямоугольную форму с неопределенным коэффициентом последовательности импульсов, т.е. отношением времени импульса к продолжительности состояния покоя. Этот аппарат ручной, и в нем не предусмотрена регулировка направления.
В патенте США 5618315, выданном на имя Элиота (Elliott), описана передача множества импульсов в линейном направлении, а также применение вращательных сил. Передача осуществляется отдельным ручным аппаратом (РА), который обеспечивает визуальную обратную связь относительно регулировки направления для пользователя. Управление РА осуществляется отдельным управляющим устройством, содержащим пользовательский интерфейс для ввода частот и режимов импульсов, энергии импульсов и углов регулировки направления РА.
Импульсные сигналы конкретно описаны в патенте Элиота как прямоугольные волны. Это создает ряд проблем. Во-первых, при терапевтических воздействиях на верхнешейный отдел позвоночника нежелательно применение резкой силы к таким чувствительным частям тела, как позвонки. Кроме того, идеальная прямоугольная волна имеет бесконечные частотные компоненты и ее невозможно реализовать на практике. Как электронная, так и механическая системы при попытке формировать прямоугольные волны будут достигать своих рабочих пределов, образуя сигнал с превышением на переднем и заднем фронтах импульсов, за которым следует постепенно угасающий "дребезг", показанный в нижней части фиг.4. Эти превышение и дребезг являются высокочастотными фактами, нежелательными в предполагаемом применении. Если прямоугольную волну отфильтровать в достаточной степени, чтобы удалить эти явления и сформировать более гладкий сигнал, то это уже не будет прямоугольной волной.
Резкий характер прямоугольной волны и высокочастотные явления считаются недостатками при использовании импульсного аппарата для терапевтических воздействий на верхнешейный отдел позвоночника.
Патент Элиота имеет также и другие недостатки. Ручной аппарат (РА) обеспечивает некоторую обратную связь для медицинского работника в смысле позиционирования устройства. Направление импульсов, передаваемых пациенту, можно определять по двум углам относительно вертикали или двум векторам направления. Эти данные вводятся в систему в отдельное стационарное устройство управления, которое необязательно должно находиться в прямой видимости врача во время лечения. Группа светоизлучающих диодов размещена перекрестно в верхней части РА и обеспечивает обратную связь для пользователя относительно текущего угла аппарата. Позиционирование и регулировка направления аппарата осуществляются вручную. При достижении совмещения с заданными векторами направления начинают светиться центральные светодиоды. В это время врач нажимает рукой на пусковой элемент для начала передачи импульсов.
Этот аппарат имеет неявные, но существенные проблемы. Даже при сравнительно небольшом весе аппарата после его использования в течение нескольких часов врач может уставать умственно и физически. Начало терапии зависит от визуальной обратной связи и ручного нажатия на пусковой элемент. Если устройство теряет ориентацию, не предусмотрен механизм защиты от отказа. Визуальная обратная связь обеспечивается набором световых сигнализаторов, а не набором векторов направления, которые могут быть или не быть заранее правильно установлены на устройстве управления и которые часто находятся вне поля зрения врача.
Некоторые проблемы можно решить, установив РА на стационарной подставке, как упоминается в качестве варианта в патенте Элиота. Установка импульсного аппарата уменьшает усталость пользователя, а также может снизить вероятность потери ориентации во время работы, однако не решает проблему возможности полной потери ориентации. Импульсное устройство Элиота имеет жесткий щуп, и головка щупа контактирует с чувствительной частью тела человека. Размещение головки щупа в фиксированном положении создает новую проблему. Так как пациент также находится в неподвижном положении на кушетке, его внезапное движение может привести к травме из-за контакта с головкой щупа. Поэтому весь выигрыш безопасности, полученный в результате установки РА на неподвижной подставке, нивелируется другими проблемами безопасности, обусловленными неподвижным положением.
В патенте Элиота в некоторой степени учтена точность использования, однако не решена проблема защиты от отказов, упомянутая выше. Не предусмотрены попытки исключить все потенциальные источники ошибки человека в процессе работы. Кроме того, как упоминалось выше, проблематично обеспечить прямоугольную волну в качестве импульсного сигнала.
В патенте США 6228042, выданном на имя Дангана (Dungan), описан аппарат, аналогичный аппарату Элиота в том, что он позволяет передавать множество импульсов с частотой 30 Гц. В основе его конструкции также использованы соленоиды или электрические двигатели, и он также является ручным аппаратом. Обратная связь относительно ориентации аппарата не предусмотрена, что делает эту конструкцию менее эффективной, чем конструкция, предложенная Элиотом.
В патенте США 6602211, выданном на имя Тасека (Tucek), вопрос регулировки направления не рассматривается. В нем используется блок управления переменной частотой, и импульсы передаются через сигналы, посылаемые в электрические обмотки, которые аналогичны по поведению и обладают некоторой неточностью. Существенным признаком этого устройства является отключение в случае превышения установленной температуры. Этот признак важен для медицинских приборов, используемых близко к телу.
Все описанные выше устройства являются ручными аппаратами (РА), которые обычно не обеспечивают точность направления передачи импульсов телу для воздействия на спинной и верхнешейный отделы позвоночника. Лучшим из них, вероятно, является аппарат Элиота, так как он обеспечивает некоторую степень обратной связи относительно направления устройства. Однако его работа не защищена от отказов. Элиот также предложил устанавливать аппарат на неподвижной подставке, чтобы уменьшить усталость оператора или неточности направления, однако не предусмотрено никаких практических средств для предотвращения травмирования пациента таким стационарным аппаратом.
И, наконец, ни в одном из описанных выше устройств не предусмотрены автоматизация и проверка допустимости данных как важная часть их конструкции. Без всесторонней проверки допустимости данных сложно гарантировать надежную, безопасную и соответствующую работу аппарата, что является желательным при импульсной терапии спинного и верхнешейного отдела позвоночника.
Краткое изложение сущности изобретения
Настоящее изобретение относится к аппарату для импульсной терапии спинного и верхнешейного отдела позвоночника, который содержит подставку, имеющую вертикально ориентированный рычаг, верхний конец которой способен подниматься и опускаться. К вертикально ориентированному рычагу присоединен горизонтально ориентированный рычаг, способный перемещаться в осевом направлении относительно вертикально ориентированного рычага и способный поворачиваться вокруг собственной оси и вокруг оси вертикально ориентированного рычага. Аппарат подсоединен к дистальному концу горизонтального рычага и способен поворачиваться вокруг оси через его соединение с горизонтальным рычагом. Аппарат содержит щуп, выступающий из его нижнего конца, и способен перемещать его как в линейном, так и во вращательном направлениях. Средство отображения используется для ввода информации об ориентации щупа и отображения, когда щуп сориентирован относительно пациента.
Щуп может быть выполнен убирающимся при встрече с сопротивлением, имеющим силу заданной величины.
Щуп может иметь внутреннюю втулку, скользящую внутри наружной втулки, при этом внутренняя втулка может удерживаться в выдвинутом положении относительно наружной втулки с помощью смещенных фрикционных муфт, которые освобождаются при приложении пороговой силы к внутренней втулке относительно наружной втулки.
Смещенные фрикционные муфты могут содержать множество шарикоподшипников, смещенных к выемкам в стенке трубки щупа.
Аппарат может содержать средство отображения, которое состоит из сенсорного экрана, установленного сверху аппарата, имеющего микропроцессор, запрограммированный на распознавание правильной ориентации и разрешения начала работы только при достижении правильной ориентации.
Аппарат может также содержать линейный электропривод и второй линейный электропривод, соединенный со щупом, который передает синусоидальные импульсные сигналы вдоль линейной оси щупа.
Внешний компьютер подсоединен к аппарату и может использоваться для ввода оцифрованных точек данных, относящихся к циркульным измерениям сторон тела человека, и передачи этих точек данных из внешнего компьютера в аппарат.
Краткое описание чертежей
Другие существенные признаки и преимущества изобретения будут понятны из следующего подробного описания примерного предпочтительного варианта осуществления изобретения в совокупности с прилагаемыми чертежами, на которых
фиг.1 изображает общий вид сбоку вертикальной проекции подставки, арматуры и головки аппарата относительно пациента, подвергающегося терапевтической процедуре, и удаленный компьютер, используемый для автоматизированного определения параметров терапии;
фиг.1А изображает вид сверху устройства по фиг.1;
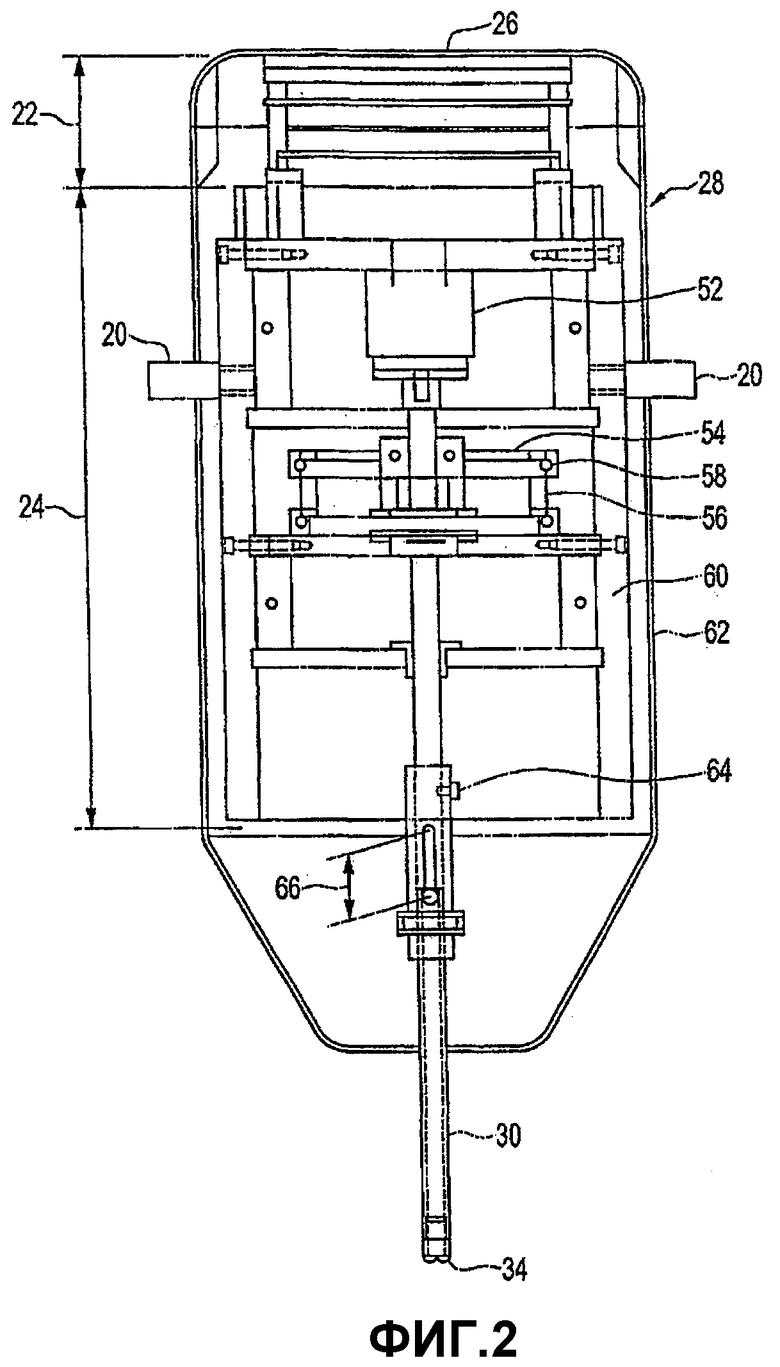
фиг.2 изображает вид спереди головки аппарата, содержащей блок управления с локальным пользовательским интерфейсом, преобразователь и щуп, передающие импульсы в тело пациента;
фиг.2А изображает вид сбоку предохранительной муфты, встроенной в щуп, показанную на фиг.2;
фиг.3 изображает вид сбоку головки устройства;
фиг.4 представляет сравнение синусоидального и прямоугольного сигналов;
фиг.5 изображает синусоидальный сигнал с линейно возрастающей частотой;
фиг.6 изображает линейный подъем частоты и сигнал в точке перехода;
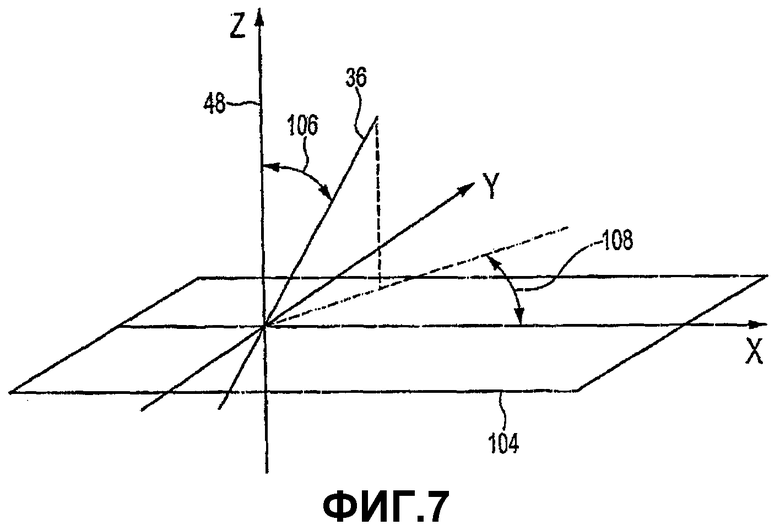
фиг.7 изображает схему угловой или направленной ориентации в трех измерениях;
фиг.8 представляет сравнение действительной ориентации и заданного направления терапевтического воздействия, и
фиг.9 изображает алгоритм осуществления процесса терапевтического воздействия с использованием аппарата для импульсной терапии спинного и верхнешейного отдела позвоночника.
Краткое описание предпочтительных вариантов изобретения
Установка аппарата и его главные компоненты
Как показано на фиг.1, неподвижная подставка 10 держит рычаг или арматурный элемент 16, который в свою очередь держит головку 28 аппарата для импульсной терапии. Рычаг 16 размещен с возможностью скольжения во втулке 19. Подставка 10 может поднимать или опускать рычаг 16 с помощью большого выдвижного поршня или линейного привода 12 под управлением оператора. Рычаг 16 установлен сверху поршня 12 подставки на сложном соединении с тремя степенями свободы, которое называется соединением 14 подставки. Соединение 14 подставки позволяет рычагу 16 поворачиваться в горизонтальной плоскости, создавая угол сгибания. При этом головка преобразователя может наклоняться в этом направлении, а рычаг не может. И, наконец, соединение 14 подставки позволяет наклонять рычаг 16 относительно горизонтальной плоскости, создавая угол поворота. Рычаг 16 скользит вперед и назад во втулке 19 относительно подставки 10. Освобождение запора 21 позволяет рычагу 16 поворачиваться внутри втулки 19. Канавка в рычаге 16 и смещенный шарикоподшипник во внутренней цилиндрической поверхности втулки 19 создают сопротивление рычагу 16, в результате которого шарикоподшипник выходит из канавки в рычаге 16 при его повороте относительно втулки 19. Ярмо 18 имеет два рычажных элемента, которые огибают головку 28 аппарата и присоединены к ней с помощью двух осей поворота 20 на каждой стороне головки 28. Рычаг 16 держит ярмо 18. Ярмо 18 лучше видно на виде сверху на фиг.1А. На одной стороне головки 28 аппарата предусмотрен ручной блокирующий механизм 17 вблизи оси поворота 20. Сенсорный экран 26 сверху головки 28 аппарата отображает пользовательский интерфейс, который используется для позиционирования и регулировки аппарата.
Убирающийся щуп 30 выступает из головки аппарата 28, и его конечная точка 34 используется для подачи импульсов в заданную точку контакта 35 на теле 32 пациента. Точка контакта 35 может находиться на верхнем шейном позвонке, сзади уха, как показано на фиг.1. Пациент 32 лежит на кушетке 44, и требуемая точка контакта 35 находится в неподвижном положении. Комбинация множества компонентов и степеней свободы головки 28 устройства, описанных выше, позволяет позиционировать линейную ось 36 головки 28 аппарата и убирающийся щуп 30 в любом направлении в трех измерениях, одновременно удерживая конец 34 щупа в заданном неподвижном положении в трех измерениях. Для терапевтического воздействия это неподвижное место является точкой контакта 35 на теле 32 пациента.
Во время терапевтического воздействия линейная ось щупа находится под любым заданным углом 36 в трех измерениях, и в предпочтительном варианте изобретения этот угол вычисляется относительно вертикального направления 8. Ниже будет описано, каким образом осуществляется регулировка этого угла.
На фиг.1 также показан удаленный компьютер 40, который может находиться в любом месте и необязательно близко к месту осуществления терапевтической процедуры. Рентгеновские данные пациента и накладываемые рисунки или другие графические материалы оцифровываются и вводятся в удаленный компьютер 40 с помощью периферийного графического планшета 42. В удаленном компьютере 40 на этих необработанных данных выполняются вычисления и получаются рабочие параметры. Эти параметры посылаются в аппарат для импульсной терапии спинного и верхнешейного отдела позвоночника по любому каналу передачи данных 38, например последовательному каналу передачи данных или беспроводному каналу передачи данных. К виду канала передачи данных не предъявляется никаких ограничений.
Как показано на фиг.2, головка 28 аппарата имеет экранирующий кожух 62 или корпус, соответствующий стандартам ЭМИ. На фиг.2 не показан источник питания. Основными элементами головки 28 аппарата являются секция блока управления 22, секция преобразователя 24 и убирающийся щуп 30. Секция блока управления содержит сенсорный экран 26, который отображает пользовательский интерфейс, и электронную схемную плату 70 (см. фиг.3). Секция преобразователя 24 содержит линейный электропривод, шаговый двигатель и другие детали для их соединения с убирающимся щупом 20. Линейный электропривод 52 смонтирован сверху оси убирающегося щупа 30 и используется для передачи синусоидальных импульсных сигналов вдоль линейной оси убирающегося щупа 30. Большая шестерня 54 удерживает убирающийся щуп 30 в положении на ее продольной оси. Большая шестерня 54 может двигаться в осевом направлении, позволяя легкое линейное движение, однако она выполнена жесткой при кручении. Гибкий ремень 56, имеющий зубчатую поверхность на одной стороне, которая входит в зацепление с большой шестерней 54, приводится в действие вращательным шаговым двигателем, который вынуждает гибкий ремень 56 поворачиваться на точный угол для передачи необходимой величины вращательного движения убирающегося щупа 30 в течение времени, когда он находится в контакте с пациентом. Вместе с движением щупа используются датчики, чтобы ограничить угол, под которым он может перемещаться. Шаговый двигатель обеспечивает постоянный крутящий момент. Линейный электропривод является прецизионным компонентом и имеется в свободном доступе на рынке.
На фиг.3 показаны дополнительные компоненты головки аппарата, необходимые для электронного устройства. Справа показан факультативный охлаждающий вентилятор 72, а слева - большой радиатор 76 и источник питания 74. Большой радиатор 76 присоединен к корпусу 60 преобразователя для рассеяния тепла преобразователя, а также присоединен к источнику питания 74, другому источнику тепла в устройстве. Радиатор выполнен из алюминия, и он относительно легкий для своего размера, хотя вес и не представляет большой проблемы, так как головка аппарата установлена на неподвижной подставке. Размер радиатора обеспечивает отличное рассеяние тепла, что важно для медицинского устройства. Сверху показан блок управления 22, состоящий из сенсорного экрана 26 и электронной схемной платы 70. Эти компоненты могут располагаться в альтернативных местах в других вариантах реализации устройства, хотя экранированный корпус 62 всегда будет снаружи. Убирающийся щуп 30 всегда имеет линейную ось с измеренным направлением, и чаще всего она размещается приблизительно вдоль центральной линии преобразователя 24.
Предохранительная муфта
Предохранительная муфта 64 установлена вдоль линейной оси щупа 30, как показано на фиг.2. Предохранительная муфта 64 является важным компонентом для обеспечения безопасности пациента, так как точка контакта с пациентом и конец 34 щупа находятся в фиксированных положениях в пространстве. Предохранительная муфта позволяет щупу убираться почти на один дюйм под действием умеренной силы вдоль линейной оси, однако эта сила должна превосходить нормальное терапевтическое усилие. С помощью этой предохранительной муфты на щупе обеспечивается "убирающийся щуп". Предохранительная муфта 64 показана более детально на фиг.2А. Щуп состоит из двух отдельных деталей, а именно наружной втулки 79 сверху предохранительной муфты 64 и нижней трубки 30 щупа, которая входит внутрь втулки 79 предохранительной муфты. Диапазон движения 66 трубки 30 щупа во втулке 79 составляет приблизительно один дюйм, что достаточно, чтобы не вызвать травмы при внезапных движениях пациента. Диапазон движения 66 регулируется комбинацией направляющего пальца 78 и паза, которые также видны на фиг.2. Степень усилия, необходимого, чтобы вынудить щуп 30 убраться, регулируется уплотнительным кольцом 77, которое прижимает три стальных шарика 67 к стенкам трубки щупа. Три стальных шарика 67 расположены под углом 120 градусов относительно друг друга, как показано на горизонтальном поперечном сечении кольца на правой стороне фиг.2А. Во время нормальной работы три стальных шарика 67 зажаты в трех сферических выемках 65 вдоль стенки трубки 30 щупа, создавая плотный контакт, так что втулка 79 и трубка 30 щупа движутся последовательно. Достаточное усилие позволяет трем стальным шарикам 67 расширить кольцо 77, так что шарики выходят из выемок 65. При этом трубка 30 щупа втягивается вверх во втулку 79 предохранительной муфты, содержащую датчик эффекта Холла, который воспринимает это втянутое положение и выключает механизм. Трубка 30 щупа возвращается в исходное положение вручную путем вытягивания конца 34 щупа до тех пор, пока шарики не защелкнутся на месте. Для дополнительной безопасности рычаг 12 невозможно опускать дальше на подставке 10, когда трубка 30 щупа втянута. Кроме того, втягивание трубки 30 отключает аппарат.
Для дополнительной безопасности предусмотрен предохранительный выключатель 33, с помощью которого пациент может выключить аппарат в случае любой неисправности.
Преобразователь и характеристики сигналов
Преобразователь 24 в аппарате для импульсной терапии спинного и верхнешейного отдела позвоночника также предназначен для обеспечения более точной и адекватной работы, чем известные аппараты. Для линейных и вращательных движений используются линейные электроприводы 52 и 58, обеспечивающие более высокую точность. Эти компоненты выбираются с учетом стабильности в диапазоне рабочих температур и могут быть калиброваны во время изготовления. Для контролирования работы и выполнения динамических регулировок можно использовать измерительные преобразователи перемещения и точные часы (кварцевые генераторы) под управлением блока управления 22, чтобы гарантировать сохранение калибровок.
Для линейных и вращательных импульсов используются синусоидальные сигналы. В верхней части фиг.4 показана обычная синусоидальная волна 80. Следует отметить гладкий характер кривой в отличие от резкой и несовершенной формы прямоугольной волны 82, показанной в нижней части. Гладкая синусоидальная волна больше подходит для применения в хиропрактике.
Для формирования аналоговых сигналов, в частности синусоидальных сигналов 80, обычно применяется метод, известный как широтно-импульсная модуляция (ШИМ). Формирование аналоговых сигналов с использованием ШИМ и фильтров нижних частот хорошо известно и описано. Множество компаний производит и поставляет на рынок контроллеры или микропроцессоры, содержащие таблицы сигналов, и предоставляет рецептурные справочники по формированию аналоговых сигналов. В эту документацию включены практические схемы фильтров нижних частот и их характеристики. В кратком изложении рабочий цикл высокочастотного цифрового выходного сигнала модифицируется для отображения значения аналоговых данных как точки на синусоидальной волне. Этот ШИМ импульс затем пропускается через фильтр нижних частот. Результирующий сигнал несет требуемый аналоговый сигнал без использования цифроаналогового преобразователя (ЦАП). Частоты импульсов, используемые в настоящем изобретении, низкие, и достаточно использовать простой одноступенчатый фильтр нижних частот, состоящий из резистора и конденсатора, чтобы получить синусоидальную волну 80.
Сложные сигналы можно получать на множестве частот, и на практике они ограничены только рабочими характеристиками линейных электроприводов. Линейные прецизионные электроприводы 52 и 58 обычно работают в диапазоне частот от 20 Гц до 40 КГц, как стереофоническая аппаратура, и в этом диапазоне можно формировать и реализовать в ICID любой сложный сигнал. Амплитуда сигнала также выбирается врачом и представляет энергию импульса, который должен передаваться во время терапевтической процедуры. Максимальная амплитуда 96 и высокая конечная частота устанавливаются с учетом безопасности. В настоящее время конечная частота составляет 200 Гц.
Частота синусоидального сигнала, выбранного для настоящего изобретения, линейно возрастает как функция времени, как показано на фиг.5 и 6. Из-за своих звуковых характеристик этот сигнал называется "чирп" (чириканье). В предпочтительном варианте изобретения чирп начинается с цикла 90 с частотой 50 Гц, продолжается циклами 92 с частотой 51 Гц и 93 с частотой 52 Гц, и так далее до цикла 99 с частотой 98 Гц и цикла 100 с частотой 100 Гц. В это время частота снова устанавливается на 50 Гц, и процесс начинается сначала. В результате достигается линейное изменение частоты как функция времени, как показано на фиг.6. При средней частоте 75 Гц возврат к исходной частоте происходит через каждые 0,67 сек. Количество передаваемых импульсов зависит от длительности импульса, установленной врачом. Он вычисляется и известен до начала терапевтической процедуры. Изменение частоты на фиг.6 показывает большой разрыв 102, однако в реальном импульсном сигнале, передаваемом пациенту, его нет. Врезанная диаграмма справа иллюстрирует, что разрыв 102 представляет собой всего лишь небольшое изменение наклона синусоидальной волны возле пересечения нуля на переходе от 100 к 50 Гц.
Таким образом, использование блока управления и метода ШИМ позволяет формировать любой сложный сигнал в менее чем 40 КГц диапазоне линейного электропривода. Выбранный сигнал для предпочтительного варианта изобретения представляет собой линейное изменение частоты или чирп, который циклически повторяется от 50 до 100 Гц, как показано на фиг.5 и 6. Прямоугольные волны 82 в настоящем изобретении не используются. Гладкий синусоидальный сигнал, подобный сигналу с постепенно возрастающей частотой, считается идеальным импульсным сигналом для применения в хиропрактике.
Вращательные импульсы также создаются редукторным шаговым двигателем. Обычно угол вращения небольшой, но он ограничен не шаговым двигателем, а только концевыми выключателями, встроенными во вращательную редукторную систему. Конец щупа, контактирующий с пациентом, имеет негладкую поверхность, чтобы применить вращательное усилие. Этот неровный конец щупа может быть выполнен в форме решетки, перекрестий или множества небольших выступов. Неровная поверхность имеет гладкие края, необходимые для обеспечения комфорта пациенту.
Угол ориентации и проверка допустимости данных
Средство для измерения направления в трех измерениях показано на фиг.7. Линейная ось 36 щупа показана относительно вертикального направления 48, которое соответствует оси Z на обычной трехмерной декартовой системе координат. Под прямыми углами к вертикали 48 показаны обычные декартовы оси Х и У, лежащие в горизонтальной плоскости 104. Направление кушетки с пациентом, а также нулевое положение и направление всех компонентов аппарата для импульсной терапии спинного и верхнешейного отдела позвоночника известны относительно выбранной системы координат Х, У и Z. Поэтому угловое положение линейной оси 36 описывается индивидуально в трех измерениях углом относительно вертикали, альфа 106, и углом поворота относительно оси Х, бета 108, в горизонтальной плоскости 104.
Требуемый угол терапевтического воздействия определяется врачом на основании рентгеновского анализа, физического обследования, других водных данных и существенного врачебного опыта. Врачи регистрируют и отслеживают эффективность выбранных углов терапевтического воздействия у многих пациентов и во многих ситуациях. Для получения соответствующих результатов важно подавать линейные импульсы под правильным углом.
В настоящем изобретении предусмотрена "проверка допустимости данных" в целях повышения надежности. Действительный угол 36 линейной оси убирающегося щупа 30 измеряется почти в реальном времени через микросекундные интервалы с помощью обычного углового измерительного прибора. Например, с помощью акселерометров можно измерять угловое положение относительно вертикали. Как показано на фиг.8, действительный угол 36 линейной оси щупа сравнивается с заданным углом 110 воздействия, который определен врачом. Измеренный угол 36 линейной оси и заданный угол 110 воздействия должны быть очень близки друг другу, перед тем как аппарат начнет передачу импульсов. Максимальная разность 112 углов устанавливается изготовителем аппарата, и врачу предоставляются варианты для достижения более высокой точности. При достижении правильного углового направления вводятся в зацепление блокирующие механизмы. При разблокировке и потере углового направления аппарат немедленно прекращает работу (в течение микросекунд).
Этот принцип полностью исключает из активной процедуры возможность ошибки человека. Необходимо тщательно подходить к установке, и далее будут описаны автоматизированные способы установки. В настоящем изобретении исключены недостатки известных аппаратов за счет того, что работа прекращается, когда угол оси 36 щупа не совпадает с установленным углом 110 воздействия.
Проверка допустимости данных обеспечивается множеством элементов. В аппарате предусмотрены дополнительные регулировки. В настоящем изобретении автоматически регулируются длительность импульсов или количество передаваемых импульсов. Работа не зависит от нажатия и освобождения пускового элемента человеком, при котором отсутствуют точность и повторяемость. Проверка допустимости данных также относится к выбору энергии или интенсивности импульсов. Максимальная энергия импульсов или амплитуда синусоидальной волны задана в преобразователе, и врач может ее уменьшить. Также задан максимальный угол поворота. Эти регулировки составляют минимальный набор согласно настоящему изобретению.
В аппарат для импульсной терапии спинного и верхнешейного отдела позвоночника можно ввести дополнительные элементы обеспечения допустимости данных на основании опыта врачей. Например, врачебный опыт может показать, что определенные частоты дают оптимальные результаты в определенных ситуациях. Расширение ввода параметрических данных и связанная с ними проверка допустимости данных возможны в предполагаемых вариантах аппарата.
Блок управления и пользовательский интерфейс
Аппарат для импульсной терапии спинного и верхнешейного отдела позвоночника состоит, в основном, из сенсорного экрана 26 панели ввода данных и электронной схемной платы 70. Блок управления обычно содержит микропроцессор и различные интерфейсы ввода и вывода данных. В качестве альтернативы сенсорному экрану 26 панель ввода пользовательских данных может быть реализована в виде любой обычной комбинации средства отображения и компонентов ввода данных, например, обычного жидкокристаллического дисплея и клавиатуры, или любого другого дисплея и механизмов ввода данных, которые обеспечивают удобный для пользователя интерфейс. Особыми характеристиками блока управления и средств ввода данных в аппарате для импульсной терапии спинного и верхнешейного отдела позвоночника являются их установка на головке аппарата или вблизи нее, как показано на фиг.2, а также удобный для пользователя интерфейс. При размещении блока управления 22 вблизи преобразователя 24 согласно настоящему изобретению гарантируется, что внимание врача будет концентрироваться в области аппарата. Эта конструкция является более предпочтительной, чем отделение импульсного преобразователя от блока управления с некоторым смещением между этими двумя компонентами системы, поскольку в такой ситуации врач должен делить внимание между двумя различными участками системы и могут возникать рабочие ошибки.
Удобный для пользователя интерфейс через экран 25 показан в верхней части головки 28 аппарата на фиг.1А. Пользовательский интерфейс управляется с помощью меню. Врачу отображается логическая последовательность функций, позволяющая относительно легко проходить через операционные установки аппарата. Можно использовать установки параметров по умолчанию в рамках протоколов лечения. Окончательные установки параметров должны отображаться на экране. В установки можно вносить изменения. Чтобы скорректировать установки, не требуется проходить всю последовательность. Далее будут обсуждаться другие средства установки аппарата, такие как автоматизированный ввод параметрических данных.
Автоматизированный ввод данных
Автоматизированный ввод данных является не обязательной, но важной частью аппарата для импульсной терапии спинного и верхнешейного отдела позвоночника. Графический планшет 42 используется для захвата информации из рентгеновских снимков и наложенных диаграмм или других диаграмм. Этот ввод оцифровывается, что позволяет обрабатывать данные посредством компьютерных алгоритмов. Опытный врач-хиропрактик определил вычисления, которые необходимы для получения правильного заданного угла 110 воздействия. Этот угол согласуется с действительным углом 36 линейной оси щупа в трех измерениях. Затем добавляются другие параметры воздействия, такие как параметры линейных и вращательных импульсов, параметры частоты и энергии, чтобы полностью определить импульсную терапию спинного и верхнешейного отдела позвоночника для конкретного пациента.
Все параметрические данные воздействия организованы так, что аппарат 22 для импульсной терапии спинного и верхнешейного отдела позвоночника может их интерпретировать. Параметрические данные передаются из удаленного компьютера в аппарат для импульсной терапии спинного и верхнешейного отдела позвоночника по любому стандартному каналу 38 передачи данных, например последовательному каналу передачи данных, через порт универсальной последовательной шины (USB) или по беспроводному каналу передачи данных, и к этим коммуникационным средствам не предъявляется никаких ограничений.
Автоматизированный ввод данных обеспечивает ряд преимуществ. Во-первых, он обеспечивает более удобную оцифровку данных из графического планшета 42, чем их вычисление вручную и ввод чисел из диаграммы. Когда данные имеют цифровую форму, их можно обрабатывать с помощью алгоритмов. Можно архивировать в компьютере 40 данные, представляющие множество пациентов и ситуаций. Такие ретроспективные данные и комбинации данных можно применять в новых ситуациях для повышения эффективности протоколов лечения. После определения параметров терапии их можно автоматически сравнивать с другими данными, а также предоставлять для анализа опытному врачу. После этого аппарат для импульсной терапии спинного и верхнешейного отдела позвоночника точно и соответствующим образом реализует параметры терапии, обеспечивая общую уверенность в выполнении протокола лечения.
Алгоритм терапевтического воздействия на пациента
Терапевтическое применение аппарата для импульсной терапии спинного и верхнешейного отдела позвоночника будет описано в виде последовательности операций, изображенной на фиг.9. На этапе 120 проводят обследование и опрос пациента. На этапе 122 делаются предварительные рентгеновские снимки, а также статические измерения асимметрии тазового и плечевого пояса и разности длины ног с помощью циркуля на теле. На графическом планшете отмечаются представляющие интерес точки данных, такие как наклон позвоночника, наклон головы и положение первого шейного позвонка относительно черепа и шейного отдела позвоночника. На этапе 124 оцифрованные точки данных передаются из графического планшета в компьютер. Делаются рентгеновские снимки в трех измерениях с помощью обычной программы для импульсной терапии спинного и верхнешейного отдела позвоночника. На этапе 126 получают параметрические данные для работы аппарата из программы для импульсной терапии верхнешейного отдела позвоночника и архивов данных, которые включают в себя следующее: (а) частоту и длительность линейных импульсов; (b) угол линейных импульсов; (c) силу линейных импульсов и (d) угол поворота. Эти параметрические данные передаются в программу импульсной терапии спинного и верхнешейного отдела позвоночника вручную через сенсорный экран или автоматически через последовательный канал передачи данных на этапе 128. На этапе 130 параметры импульсов, включая максимальную силу, частоту и длительность импульсов, проверяются в программе импульсной терапии спинного и верхнешейного отдела позвоночника. Установки отображаются на сенсорном экране 26. На этапе 132 проверяют, близко ли совпадают измеренное угловое направление линейных импульсов и заданное угловое направление воздействия. Допустимое расхождение устанавливается предварительно. Если правильная ориентация не достигнута, система переходит к этапу 134. Если же ориентация допустимая, система переходит к этапу 136. На этапе 134 корректируется угол линейной оси щупа в целях достижения правильной ориентации. Затем система возвращается к этапу 132. На этапе 136 при достижении угловой ориентации угол линейной оси щупа фиксируется или блокируется, а также блокируется положение конца щупа. После этого можно включить преобразователь аппарата для импульсной терапии спинного и верхнешейного отдела позвоночника. При потере угловой ориентации работа останавливается. Вычисления на этапах 132 и 134 продолжаются в процессе всей процедуры. На этапе 138 после импульсной терапии спинного и верхнешейного отдела позвоночника измеряют влияние терапии на асимметрию тазового и плечевого пояса и разность длины ног с использованием циркуля на теле. На этапе 140 после анализа и рекомендаций врач назначает следующую процедуру пациенту, если это необходимо. На этапе 142 через 5 недель проводят рентгеновский анализ, чтобы определить прогресс и эффективность лечения.
Настоящее изобретение было описано со ссылками на иллюстративные варианты его осуществления, и данное описание не следует толковать в ограничительном смысле. Различные модификации, а также другие варианты изобретения, будут очевидны для специалистов на основании данного описания. При этом подразумевается, что прилагаемая формула изобретения охватывает все такие модификации или варианты, как подпадающие под действительный объем притязаний изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2006 |
|
RU2308257C1 |
| СПОСОБ МАНУАЛЬНОЙ ТЕРАПИИ НАРУШЕНИЙ РЕПРОДУКТИВНОЙ ФУНКЦИИ У ЖЕНЩИН | 2005 |
|
RU2290158C1 |
| СПОСОБ МАНУАЛЬНОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ПОЗВОНОЧНИКА НА УРОВНЕ АТЛАНТООКЦИПИТАЛЬНОГО СОЧЛЕНЕНИЯ | 2001 |
|
RU2199299C1 |
| СПОСОБ ДИАГНОСТИКИ БЛОКИРОВАНИЯ ВЕРХНИХ ШЕЙНЫХ ПОЗВОНОЧНО-ДВИГАТЕЛЬНЫХ СЕГМЕНТОВ | 2016 |
|
RU2625287C1 |
| СПОСОБ ЛЕЧЕНИЯ ДИСКОГЕННЫХ СКОЛИОЗОВ | 2010 |
|
RU2445131C1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ МАНУАЛЬНОЙ ТЕРАПИИ | 1999 |
|
RU2144778C1 |
| СПОСОБ ЛОКАЛЬНОЙ ГИПОТЕРМИИ СПИННОГО МОЗГА ПРИ ТРАВМАТИЧЕСКИХ ПОВРЕЖДЕНИЯХ ВЕРХНЕШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2015 |
|
RU2593581C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2275941C1 |
| СПОСОБ ДИАГНОСТИКИ СТРУКТУРНОЙ ПАТОЛОГИИ КРАНИО-ВЕРТЕБРАЛЬНОЙ ОБЛАСТИ У ДЕТЕЙ | 2007 |
|
RU2359607C1 |








Изобретение относится к медицине. Аппарат для импульсной терапии содержит подставку, имеющую поршень, горизонтально ориентированный рычаг и головку для импульсной терапии. Поршень способен подниматься и опускаться. Горизонтально ориентированный рычаг присоединен к поршню и способен перемещаться в осевом направлении относительно поршня, а также способен поворачиваться вокруг собственной оси и вокруг оси поршня. Головка для импульсной терапии присоединена к дистальному концу горизонтального рычага и способна поворачиваться вокруг оси через ее соединение с горизонтальным рычагом. Головка для импульсной терапии содержит щуп, выступающий из ее нижнего конца, и способна перемещать упомянутый щуп как в линейном, так и во вращательном направлении, средство отображения для ввода информации об ориентации щупа и отображения, когда щуп сориентирован относительно пациента. В одном из вариантов данного устройства подставка опирается на опорную поверхность и имеет соединительный конец, присоединенный к блоку управления импульсами и средству отображения с множеством степеней свободы. Такая конструкция позволяет блоку управления импульсами и средству отображения перемещаться во множестве направлений для ориентации щупа относительно пациента, лежащего на кушетке вблизи блока управления импульсами и средства отображения. Применение любого из вариантов устройств позволит надежно позиционировать и ориентировать его в трех измерениях, защищает пациента от травм в результате приложения избыточной силы к участку воздействия в условиях стационарной установки за счет наличия в устройстве предохранительной муфты, а также гарантирует правильно сориентированное направление перед включением аппарата. 5 н. и 25 з.п.ф-лы, 9 ил.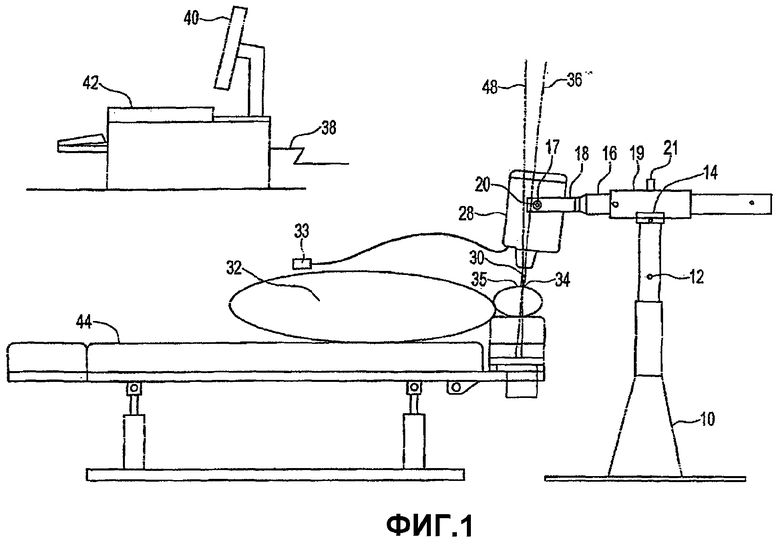
| US 5618315, 08.04.1997 | |||
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ ОСТЕОХОНДРОЗОМ ПОЗВОНОЧНИКА С ДВИГАТЕЛЬНЫМИ НАРУШЕНИЯМИ | 2001 |
|
RU2195251C1 |
| СПОСОБ ВЫСОКОВОЛЬТНОЙ ЭЛЕКТРОТЕРАПИИ | 1993 |
|
RU2025144C1 |
| US 653928, 25.03.2003 | |||
| Дозатор для бункеров кормоприготовительных агрегатов | 1954 |
|
SU100274A1 |
| Skoromets A.A | |||
| et al | |||
| Magnetic stimulation in restorative therapy of patients with spondylogenic diseases of nervous system | |||
| Zh Nevrol Psikhiatr Im S S Korsakova | |||
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| (Реферат в PubMed, PMID: 9591061). | |||

