Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и систем управления подвижных объектов, и предназначено для измерения угловой скорости в этих системах.
Известные волоконно-оптические гироскопы и лазерные гироскопы широко используются в инерциальной навигации и в системах наведения. Преимуществом этих гироскопов является достаточно высокая точность. Недостатком этих гироскопов является достаточно высокая стоимость и относительно большие габариты. К областям применения, требующим гироскопов менее дорогих и меньшего размера, относятся: системы автомобильной безопасности (системы против скольжения, системы камер), потребительские товары (видеокамеры, GPS, спортивное оборудование), промышленные товары (роботы, управление оборудованием), медицинские изделия (хирургические инструменты). [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283].
В настоящее время известны микромеханические гироскопы на основе кремния. [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283]. Такие гироскопы представляют собой пластину, закрепленную на торсионах и совершающую вынужденные колебания на собственной резонансной частоте. Этот гироскоп приводится в колебательное движение путем подачи сигнала на драйвер (как правило, электростатический). При внешнем вращении микромеханического гироскопа возникает сила Кориолиса, создающая колебания относительно измерительной оси. При этом зазор между подвижной массой микромеханического гироскопа и основанием изменяется, что приводит к изменению расстояния между электродами и соответствующей величины емкости. Измеряя изменение величины емкости, можно определить изменение угловой скорости вращения микромеханического гироскопа.
Однако вышеуказанные гироскопы имеют низкую точность, поскольку измеряемым параметром является амплитуда, и низкую механическую прочность.
Известен также «Виброгироскоп» (Патент РФ №2123219, H01L 41/08, 1998.12.10), содержащий твердотельный элемент из сегнетоэлектрической керамики с размытым фазовым переходом в виде монолитного стержня с крестообразным поперечным сечением, с двумя парами сплошных и двумя парами встречно-штыревых электродов. Сплошные электроды соединены параллельно и подключены к выходу первого генератора. Встречно-штыревые электроды подключены к частотно-задающим цепям второго и третьего генераторов. Выходы второго и третьего генераторов подключены к входам смесителя, выход которого подключен к входу детектора, а выход детектора подключен к входу индикатора. Стабильность и помехоустойчивость позволяет применять его в компактных системах навигации и автоматического управления подвижными объектами.
Однако этот гироскоп имеет ограничения по рабочим характеристикам из-за принципа действия, который основан на вибрации подвешенных механических структур. Кроме того, эти подвешенные механические структуры очень чувствительны к внешним ударам и вибрации, т.к. они не могут быть жестко присоединены к подложке из-за резонансной вибрации. Это ограничивает диапазон применения «Виброгироскопа».
Наиболее близким по технической сущности к изобретению является гироскоп на поверхностных акустических волнах (ПАВ) [Патент US №6516665. "Микроэлектро-механический гироскоп" / Varadan V.K., Pascal В. Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V.Varadan. 2003].
Гироскоп включает в себя пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП) драйвера ПАВ, ВШП чувствительного элемента колебаний ПАВ и отражающие структуры, расположенные за пределами встречно-штыревых преобразователей. Этот гироскоп работает с использованием свойств поверхностной акустической волны, распространяющейся по пьезоэлектрической подложке. В отличие от других гироскопов этот имеет планарную конфигурацию без подвешенных резонансных механических структур, вследствие чего является устойчивым и ударопрочным. Недостатком этого гироскопа является низкая точность и, соответственно, невозможность использования его для высокоточных измерений вследствие малой амплитуды колебаний, которые воспринимают ВШП чувствительного к ПАВ элемента.
Вышеизложенные факты приводят к снижению точности оценивания угловой скорости, что и является недостатком прототипа.
Задачей настоящего изобретения является разработка вибрационного гироскопа на поверхностных акустических волнах с улучшенными характеристиками измерения угловой скорости.
Техническим результатом является повышение точности и чувствительности измерений.
Технический результат достигается тем, что в вибрационном гироскопе на поверхностных акустических волнах, содержащем пластину пьезоэлектрика с резонатором на поверхностных акустических волнах и измеритель его резонансной частоты, к незакрепленной части пластины пьезоэлектрика прикреплен корпус драйвера, в котором закреплен вибрационный привод и подвешена инерционная масса, изменение направления вибраций которой, обусловленное появлением силы Кориолиса, приводит к изменению выходного сигнала измерителя резонансной частоты резонатора на поверхностных акустических волнах, а рабочая частота вибрационного привода отличается от резонансной частоты резонатора на поверхностных акустических волнах.
Технический результат достигается за счет того, что используется движение корпуса драйвера, обусловленное действием сил Кориолиса и приводящее к дополнительным деформациям пластины пьезоэлектрика и расположенных на ней отражающих структур резонатора на ПАВ. Деформации отражающих структур, в свою очередь, приводят к изменениям местной скорости ПАВ, что влечет за собой изменения собственной резонансной частоты резонансного гироскопа на поверхностных акустических волнах с разделением частот. При этом к пластине пьезоэлектрика крепится корпус драйвера, а не чувствительная к силе Кориолиса и вибрирующая под действием вибрационного привода инерционная масса, удерживаемая внутри корпуса драйвера с помощью гибкого или бесконтактного подвеса. Основным отличием от прототипа является частотный выход предлагаемого вибрационного гироскопа на поверхностных акустических волнах. Основной причиной повышения точности является то, что информационным параметром в предлагаемом устройстве является частота.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного устройства, вибрационного гироскопа на поверхностных акустических волнах, отсутствуют, поэтому заявленное изобретение соответствует условию "новизна".
В настоящее время автору не известны вибрационные гироскопы на поверхностных акустических волнах, которые имели бы такую высокую чувствительность и динамический диапазон, подходящий для многих промышленных применений, которые обеспечивает предлагаемая конструкция вибрационного гироскопа на поверхностных акустических волнах. Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков прототипов, совпадающих с отличительными признаками заявленного изобретения, показали, что отличительные признаки заявленного изобретения не следуют явным образом из уровня развития техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
Сущность изобретения поясняется чертежом, где представлена схема вибрационного гироскопа на ПАВ.
Вибрационный гироскоп на поверхностных акустических волнах состоит из пластины пьезоэлектрика 2, выполненной, например, из кварца или из ниобата лития [1], драйвера 5 с вибрационным приводом (не показан), снабженным ограничителями 6 и инерционной массой 7. На поверхности пластины пьезоэлектрика 2, закрепленной на основании 1, сформированы ВШП 3 и отражающие структуры 4 резонатора на ПАВ.
Инерционная масса 7 может быть подвешена в бесконтактном (электромагнитном или в электростатическом) или в пружинном подвесе и совершает колебательное движение под воздействием вибрационного привода (например, электромагнитного или электростатического) драйвера 5.
Вибрационный привод драйвера 5 может отключаться. При отключении вибрационного привода инерционная масса 7 фиксируется ограничителями 6, при этом весь драйвер 5 играет роль устройства, чувствительного к воздействию сил инерции, т.е. превращается в акселерометр, измеряющий ускорения вдоль оси, перпендикулярной к рабочей поверхности пластины пьезоэлектрика. Эта информация используется для исключения влияния сил инерции на деформацию рабочей поверхности пластины пьезоэлектрика. При включении вибрационного привода драйвера 5 инерционная масса 7 подвешивается с помощью гибкого или бесконтактного подвеса, освобождаясь от ограничителей 6.
Отражающие структуры 4 и ВШП 3 резонатора на ПАВ образуют резонатор вибрационного гироскопа на ПАВ. При этом отражающие структуры могут быть изготовлены методами травления, например, ионно-плазменного, а ВШП 3 резонатора на ПАВ могут быть выполнены методами фотолитографии.
Устройство работает следующим образом.
При отсутствии вращения основания вибрационного гироскопа на ПАВ на вибрационный привод драйвера 5 от внешнего генератора (не показан) подается электрический сигнал с заданной частотой. При этом инерционная масса совершает движение в плоскости, например, параллельной поверхности пластины пьезоэлектрика 1.
При отсутствии вращения основания 1 и пластины пьезоэлектрика 2 вибрационного гироскопа на ПАВ сила Кориолиса не возникает, поэтому не происходит и соответствующего смещения инерционной массы 7 в плоскости, перпендикулярной рабочей поверхности пластины пьезоэлектрика 2. При этом собственная (резонансная) частота вибрационного гироскопа на ПАВ будет равна f0. Величина инерционной массы 7, частота напряжения, подаваемого на вибрационный привод драйвера 5, соотношение между частотой напряжения, подаваемого на вибрационный привод драйвера 5, и значением собственной (резонансной) частоты вибрационного гироскопа на ПАВ, а также конструктивные параметры пластины пьезоэлектрика 2 подбираются так, чтобы продольные низкочастотные вибрации корпуса драйвера 5 оказывали минимальное влияние на значение собственной (резонансной) частоты вибрационного гироскопа на ПАВ.
Собственная (резонансная) частота вибрационного гироскопа на ПАВ определяется как экстремальное значение его амплитудно-частотной характеристики. Работа устройства происходит аналогично работе известного резонатора на ПАВ [1]. Если пластина пьезоэлектрика 2 выполнена из ниобата лития, то резонатор вибрационного гироскопа на ПАВ может иметь собственную (резонансную) частоту до 1 ГГц. Резонансная частота резонатора вибрационного гироскопа на ПАВ определяется, например, при помощи анализатора спектра [1].
При наличии угловой скорости вращения основания 1 и пластины пьезоэлектрика 2 вибрационного гироскопа на ПАВ на вибрирующие инерционные массы 7 воздействует сила Кориолиса. Возникшее в результате воздействия силы Кориолиса колебательное движение инерционных масс 7 в направлении, перпендикулярном рабочей поверхности пластины пьезоэлектрика, через систему подвеса передается корпусу драйвера 5, что приводит к изгибной деформации рабочей поверхности и соответствующей деформации отражающих структур резонатора на ПАВ 4. Деформация отражающих структур 4 резонатора на ПАВ приводит к изменению местной скорости ПАВ, что, в свою очередь, приводит к изменению собственной частоты резонатора вибрационного гироскопа на ПАВ. В этом случае резонансная частота резонатора вибрационного гироскопа на ПАВ будет равна частоте f, не равной f0.
Частота напряжения, подаваемого на вибрационный привод драйвера 5, может быть меньше, например, в целое число (не менее двух) раз, по сравнению с собственной (резонансной) частотой резонатора на ПАВ, образованного ВШП 3 и отражающими структурами 4. Различие частот драйвера и резонатора является необходимым условием достижения заданной точности измерений: чем больше это различие, тем с большей точностью можно измерить деформацию пластины пьезоэлектрика 2, обусловленную действием силы Кориолиса.
Для алгоритмического исключения влияния инерционных сил на отклонение пластины пьезоэлектрика 2 измерения могут производиться при периодическом отключении вибрационного привода драйвера 5.
Резонансную частоту вибрационного гироскопа на ПАВ измеряют, например, анализатором спектра [1]. Эта резонансная частота связана однозначной зависимостью с величиной угловой скорости вращения пластины пьезоэлектрика 2 [2]. Угловую скорость определяют, например, по градуировочной характеристике вибрационного гироскопа на ПАВ.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполнены следующие условия:
- средство, воплощающие устройство-изобретение при его осуществлении, предназначено для использования в приборостроении, а именно в системах навигации динамических объектов, в системах управления, в том числе в автомобильной промышленности и робототехнике;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
БИБЛИОГРАФИЧЕСКИЕ ДАННЫЕ
1. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990. 416 с.
2. Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАНСНЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С РАЗДЕЛЕНИЕМ ЧАСТОТ | 2007 |
|
RU2347189C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2335739C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ РЕЗОНАНСНОГО ГИРОСКОПА НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С ДРАЙВЕРОМ | 2007 |
|
RU2345446C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ РЕЗОНАНСНОГО ГИРОСКОПА НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2335738C1 |
| ЭЛЕКТРОННЫЙ ГИРОСКОП | 2007 |
|
RU2357212C1 |
| ГИРОСКОП НА ПОВЕРНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2329466C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2007 |
|
RU2359275C1 |
| СПОСОБ ЭЛЕКТРОННОГО ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2007 |
|
RU2359276C1 |
| ПЬЕЗОГИРОСКОП | 2007 |
|
RU2390729C2 |
Вибрационный гироскоп на поверхностных акустических волнах относится к области измерительной техники и может быть использован в приборостроении и машиностроении для измерения угловой скорости. Целью изобретения является повышение точности измерения угловой скорости. Вибрационный гироскоп на поверхностных акустических волнах, содержащий пластину пьезоэлектрика с резонатором на поверхностных акустических волнах и измеритель его резонансной частоты, к незакрепленной части пластины пьезоэлектрика прикреплен корпус драйвера, в котором закреплен вибрационный привод и подвешена инерционная масса, изменение направления вибраций которой, обусловленное появлением силы Кориолиса, приводит к изменению выходного сигнала измерителя резонансной частоты резонатора, рабочая частота вибрационного привода отличается от резонансной частоты резонатора. Вибрационный привод возбуждает колебания инерционной массы вдоль направления распространения поверхностных акустических волн и с частотой, в целое число раз меньшей частоты колебаний, возбуждаемых резонатором на поверхностных акустических волнах. Вибрационный привод может периодически отключаться. Инерционная масса может быть подвешена в корпусе драйвера с использованием гибкого (пружинного) или бесконтактного (электромагнитного или электростатического) подвеса. 6 з.п. ф-лы, 1 ил.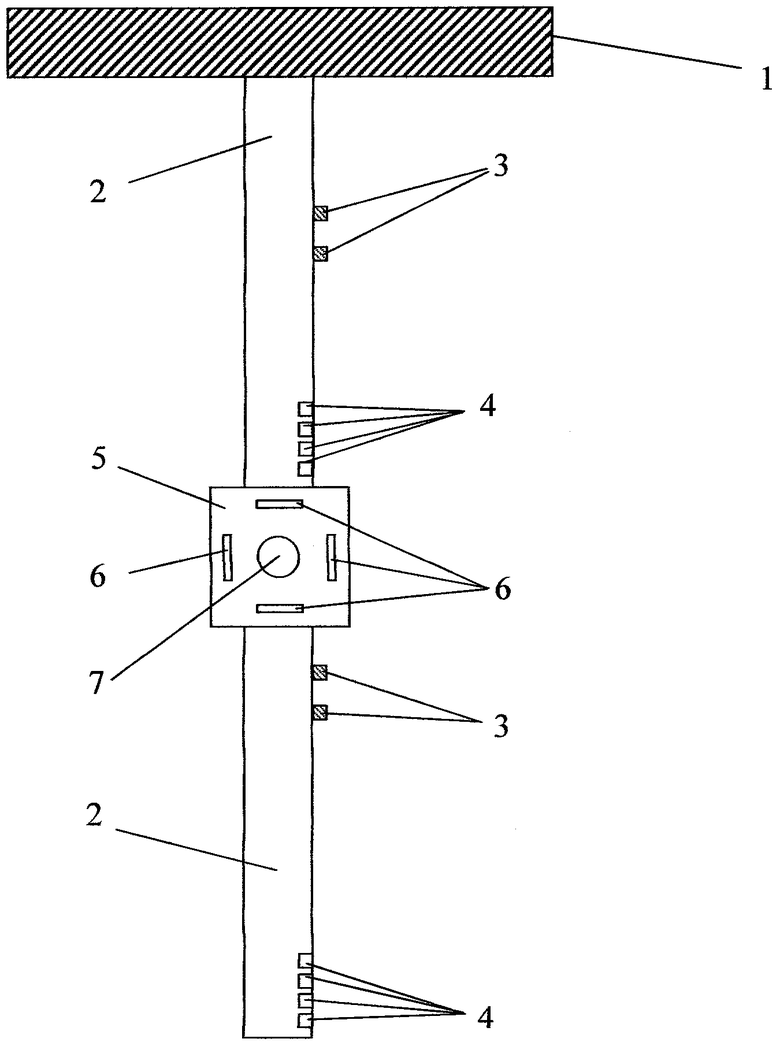
| ВИБРАЦИОННЫЙ ГИРОСКОП | 1993 |
|
RU2098761C1 |
| RU 2071033 C1, 27.12.1996 | |||
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |

