Изобретение относятся к измерительной технике, а именной к измерительным преобразователям угловой скорости.
Существует вибрационный гироскоп, имеющий основание, установленный на нем с помощью торсиона камертонный резонатор, установленные на основании и ножках камертона элементы системы возбуждения колебаний камертонного резонатора, датчика угла поворота торсиона (1).
Такой вибрационный гироскоп имеет существенные габаритные размеры, вследствие пространственности его конструкции.
Значительную миниатюризацию конструкции обеспечивает выполненный по планарной технологии вибрационный гироскоп (2), содержащий основание, установленную в нем пластину, во внутренней области которой расположены соответственно от периферии к центру внешняя и внутренняя рамки, соединенные упругими перемычками с основанием и друг с другом так, что оси кручения перемычек образуют две взаимно перпендикулярные оси вращения рамок, содержащий систему возбуждения колебаний рамок с элементами силовых преобразователей на внешней рамке и основании, элементы датчика положения на внутренней рамке и основании.
Недостатком такого вибрационного гироскопа является ограничение точности измерений, вызванное малой величиной кинетического момента ротора гироскопа вследствие того, что внутренняя рамка, как чувствительный элемент гироскопа, имеет малый момент инерции.
Технический результат изобретения повышение точности измерения угловой скорости.
Указанный результат достигается тем, что в вибрационный гироскоп, содержащий основание, закрепленную на нем пластину с внешней и внутренней рамками, соединенными друг с другом упругими перемычками и имеющими две взаимно перпендикулярные оси вращения относительно основания, систему возбуждения колебаний рамок с элементами силовых преобразователей на одной из рамок, элементы датчика положения на одной из рамок, введена вторая пластина, в первой пластине образованы внутренняя неподвижная рамка, отделенные от нее по периферии и друг от друга и расположенные соответственно по направлению от внутренней неподвижной рамки к периферии первой пластины внутренняя подвижная рамка и внешняя подвижная рамка, внутренняя подвижная рамка соединена своими двумя противоположными сторонами с внутренней неподвижной рамкой упругими перемычками, оси кручения которых образуют первую ось вращения, внешняя подвижная рамка соединена своими двумя сторонами с внутренней подвижной рамкой с помощью упругих перемычек, оси кручения которых образуют вторую ось вращения, перпендикулярную первой, внутренняя неподвижная рамка выполнена утолщенной по сравнению с другими рамками и соединена поверхностью торца с поверхностью центральной части второй пластины, первая пластина закреплена в основании с помощью ее внутренней неподвижной рамки или второй пластины, неподвижные элементы датчика положения образованы на второй пластине, а подвижные в виде электродов на внешней подвижной рамке первой пластины, элементы силовых преобразователей расположены на второй пластине и на внутренней подвижной рамке или на внешней подвижной рамке, или на внутренней подвижной рамке и внешней подвижной рамке.
В частном случае выполнения вибрационного гироскопа внутренняя неподвижная рамка, внутренняя подвижная рамка, внешняя подвижная рамка и упругие перемычки выполнены единым элементом из монокристаллического кремния методом анизотронного травления, вторая пластина выполнена из монокристаллического кремния или силикатного стекла и соединена с внутренней неподвижной рамкой диффузионной сваркой кремния.
В другом частном случае элементы датчика положения на второй пластине выполнены в виде n пар (n 1, 2,) линий задержки на поверхностных акустических волнах (ПАВ), причем линии задержки каждой пары расположены симметрично относительно второй оси вращения, а расстояние между поверхностями второй пластины и внешней подвижной рамки составляет около
d = λ/4 - f,
где:
λ длина волны ПАВ;
f максимальное суммарное перемещение внешней подвижной рамки в диапазоне измерений и при работе системы возбуждения колебаний.
При дальнейшем усовершенствовании вибрационного гироскопа центральная часть второй пластины выполнена утолщенной по сравнению с ее периферийной частью.
В последующей модификации гироскопа расстояние d между поверхностями линий задержки на второй пластине и внешней подвижной рамки образовано путем выполнения равным d расстояния между поверхностями торца внутренней неподвижной рамки первой пластины и ее внешней подвижной рамки или расстояния между поверхностями торца утолщенной центральной части второй пластины и внешней подвижной рамки первой пластины, или суммарного расстояния от торца внутренней неподвижной рамки первой пластины до поверхности ее внешней подвижной рамки и от торца утолщенной центральной части второй пластины до поверхности ее внешней части.
В частных случаях выполнения гироскопа на основании дополнительно располагаются элементы силовых преобразователей или датчиков положения или элементы силовых преобразователей и датчиков положения.
Путем образования в первой пластине внутренней неподвижной рамки, связанной с ней внутренней подвижной рамки с упругими перемычками, оси кручения которых образуют первую ось вращения, образования внешней подвижной рамки, связанной с внутренней подвижной рамкой упругими перемычками, оси кручения которых образуют перпендикулярную первой вторую ось вращения, внешняя подвижная рамка играет роль чувствительного элемента гироскопа, располагается на периферии от внутренней неподвижной части и имеет повышенный момент инерции относительно осей симметрии первой пластины, что увеличивает гироскопический момент, действующий на внешнюю подвижную рамку, повышает разрешающую способность вибрационного гироскопа и точность измерения угловой скорости.
При введении второй пластины, выполнении внутренней неподвижной рамки первой пластины, утолщенной по сравнению с другими рамками, соединении второй пластины с поверхностью торца внутренней неподвижной рамки первой пластины, закреплении первой пластины в основании с помощью ее внутренней неподвижной рамки, образовании элементов датчика положения на второй пластине и внешней подвижной рамке первой пластины устраняется влияние деформацией основания на сигнал датчика положения гироскопа, чем обеспечивается уменьшение погрешности измерения угловой скорости.
При расположении элементов силовых преобразователей на второй пластине и на внутренней подвижной рамке первой пластины достигается стабильность кинетического момента ротора гироскопа, вследствие обеспечения постоянства действующих на ротор моментов от системы возбуждения колебаний рамок, так как независимо от деформаций основания обеспечиваются неизменные расстояния между элементами силовых преобразователей. Увеличение стабильности кинетического момента приводит к повышению точности измерения угловой скорости.
Путем образования элементов силовых преобразователей на внешней подвижной рамке первой пластины или вместе на внутренней подвижной рамке и внешней подвижной рамке обеспечивается увеличение кинетического момента ротора гироскопа, вследствие увеличения моментов от системы возбуждения колебаний, увеличения углового перемещения ротора, что приводит к повышению разрешающей способности и точности измерения угловой скорости.
Выполнением единым элементом из монокристаллического кремния методом анизотропного травления внутренней неподвижной рамки, внутренней подвижной рамки, внешней подвижной рамки и упругих перемычек, выполнением второй пластины из монокристаллического кремния или силикатного стекла и соединением ее с внутренней неподвижной рамкой диффузионной сваркой кремния достигается однородность конструкции, что обеспечивает минимальные температурные деформации элементов гироскопа, уменьшает температурную погрешность и повышает точность измерения угловой скорости.
Когда элементы датчика положения на второй пластине выполнены в виде линий задержки на поверхностных акустических волнах, то происходит преобразование выходного сигнала датчика положения в частотный с основной частотой порядка десятков мегагерц, что повышает разрешающую способность гироскопа и повышает точность измерения угловой скорости.
Путем выполнения n пар (n 1, 2,) линий задержки, в которых линии задержки каждой пары расположены симметрично относительно второй оси вращения, уменьшается температурная погрешность за счет дифференциальной схемы обработки сигналов пары линий задержки, повышается разрешающая способность гироскопа за счет суммирования сигналов пар линий задержки, что повышает точность измерения угловой скорости.
При выполнении расстояния d, равного разности между четвертью длины волны ПАВ и максимальным перемещением внешней подвижной рамки, между поверхностями линий задержки на второй пластине и внешней подвижной рамки достигается максимально возможная модуляция частоты выходного сигнала гироскопа, что обеспечивает повышение разрешающей способности и точности измерения.
Образование утолщения в центральной части второй пластины обеспечивает крепление второй пластины вместе с первой пластиной к основанию посредством утолщенной центральной части второй пластины, чем достигается уменьшение влияния деформаций основания на взаимное положение первой и второй пластин, устранение ложных сигналов датчика положения гироскопа. В результате повышается точность измерения угловой скорости.
Путем образования дополнительных элементов силовых преобразователей на основании повышается действующий на ротор гироскопа переменный момент, увеличиваются амплитуда колебаний и кинетический момент ротора, чем обеспечивается повышение точности гироскопа.
В результате выполнения дополнительных элементов датчиков положения на основании повышается полезный сигнал датчика положения, повышаются разрешающая способность гироскопа и точность измерения угловой скорости.
На фиг. 1 дан разрез общего вида вибрационного гироскопа; на фиг. 2, 3 - виды первой и второй пластин соответственно; на фиг. 4, 5 соответственно электрические схемы системы возбуждения колебаний и датчика положения гироскопа; на фиг. 6 пример выполнения линий задержки на ПАВ на второй пластине; на фиг. 7 схема датчика положения с линиями задержки на ПАВ; на фиг. 8 электрическая схема системы возбуждения колебаний с элементами силовых преобразователей на внешней подвижной и внутренней подвижной рамках; на фиг. 9, 10 соответственно вид варианта выполнения второй пластины и разрез общего вида гироскопа с данным вариантом выполнения второй пластины; на фиг. 11 пример выполнения дополнительных элементов силовых преобразователей и датчиков положения на основании; на фиг. 12, 13 электрические схемы соответственно системы возбуждения колебаний и датчика положения при выполнении дополнительных элементов силовых преобразователей и датчика положения на корпусе.
Вибрационный гироскоп (фиг. 1) имеет основание 1, закрепленную в нем первую пластину с внутренней неподвижной рамкой 2, внутренней подвижной рамкой 3 и внешней подвижной рамкой 4. Толщина внутренней неподвижной рамки 2 больше толщины внутренней подвижной рамки 3 и внешней подвижной рамки 4, оба ее торца выступают за габариты рамок 3 и 4. Поверхность торца внутренней неподвижной рамки 2 прикреплена к основанию 1, к поверхности верхнего торца прикреплена центральная часть второй пластины 5. Гироскоп закрыт крышкой 6.
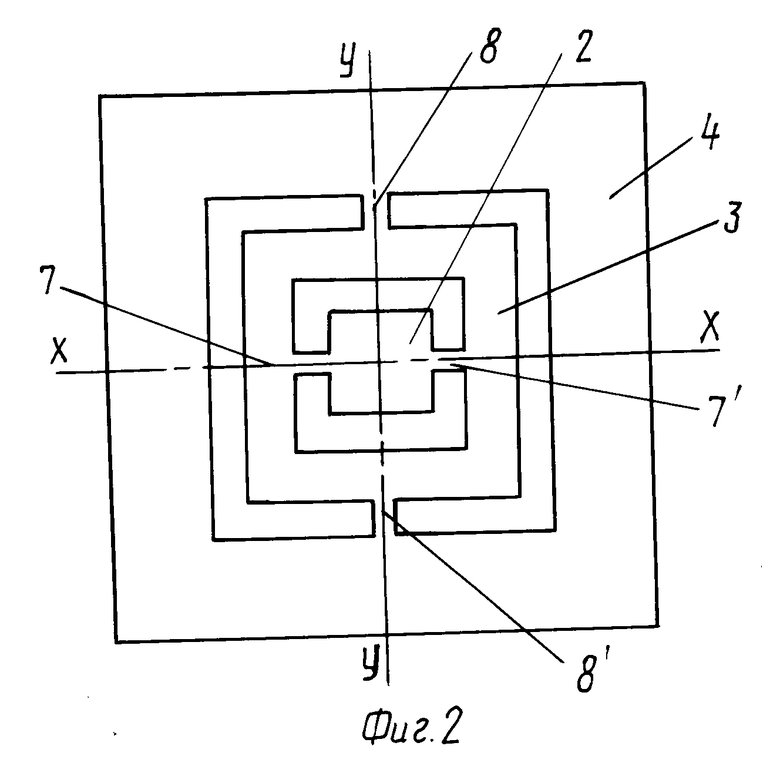
Внутренняя неподвижная рамка 2 находится в центральной части первой пластины (фиг. 2). Внутренняя подвижная рамка 3 расположена по периферии от внутренней неподвижной рамки 2, отделена от нее двумя сторонами, а остальными двумя противоположными сторонами соединена только упругими перемычками 7, 7', оси кручения которых образуют первую ось вращения X-X. Внешняя подвижная рамка 4 находится на периферии внутренней подвижной рамки 3 и целиком отделена от нее своими двумя сторонами, а двумя другими противоположными сторонами соединена только с помощью упругих перемычек 8, 8', оси кручения которых образуют вторую ось вращения y-y, перпендикулярную первой оси вращения x-x.
Элементы датчика положения образованы на внешней подвижной рамке 4 в виде подвижных электродов, представляющих собой либо напыленные металлизированные участки в случае выполнения первой пластины из электроизоляционного материала, либо поверхность внешней подвижной рамки в случае выполнения первой пластины из электропроводного материала.
Если система возбуждения колебаний рамок выполнена на электростатических силовых преобразователях, то их подвижные электроды образованы на внутренней подвижной рамке 3 или на внешней подвижной рамке 4, или на внутренней подвижной рамке 3 и внешней подвижной рамке 4. Для этого на этих рамках производится либо напыление металлизированных участков на электроизоляционные поверхности первой пластины, либо первая пластина выполняется из электропроводного материала.
При выполнении первой пластины из монокристаллического кремния внутренняя неподвижная рамка 2, внутренняя подвижная рамка 3, внешняя подвижная рамка 4, упругие перемычки 7, 7', 8, 8' выполнены единым элементом путем анизотропного травления кремния. Тогда подвижными электродами датчика положения и силовых преобразователей служат электропроводные поверхности кремния внутренней подвижной рамки 3 и внешней подвижной рамки 4.
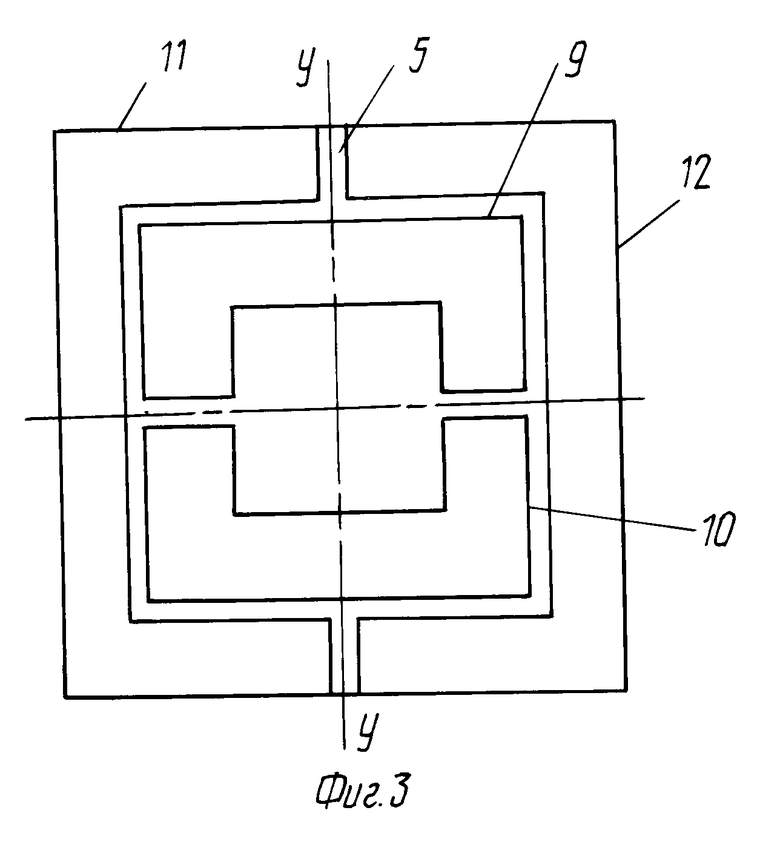
В случае образования элементов датчика положения на внешней подвижной рамке 4 и силовых преобразователей на внутренней подвижной рамке 3 на второй пластине 5 выполнены металлизированные участки 9, 10 силовых преобразователей и металлизированные участки 11, 12 датчика положения (фиг.3). Металлизированные участки 9, 10 расположены напротив близлежащей поверхности внутренней подвижной рамки 3, металлизированные участки 11, 12 напротив поверхности внешней подвижной рамки 4.
При электроизоляционном материале второй пластины 5, например, силикатном стекле, металлизированные участки 9, 12 образуются напылением металла на поверхность второй пластины 5. В случае выполнения второй пластины 5 из монокристаллического кремния металлизированные участки 9, 12 образованы участками электропроводной поверхности второй пластины 5, выделенными среди остальной окисленной поверхности второй пластины 5 из кремния.
Когда материалом для первой пластины является монокристаллический кремний, а для второй пластины 5 монокристаллический кремний или силикатное стекло, тогда соединение поверхности торца утолщенной части внутренней неподвижной рамки 2 с центральной частью второй пластины 5 производится диффузионной сваркой кремния.
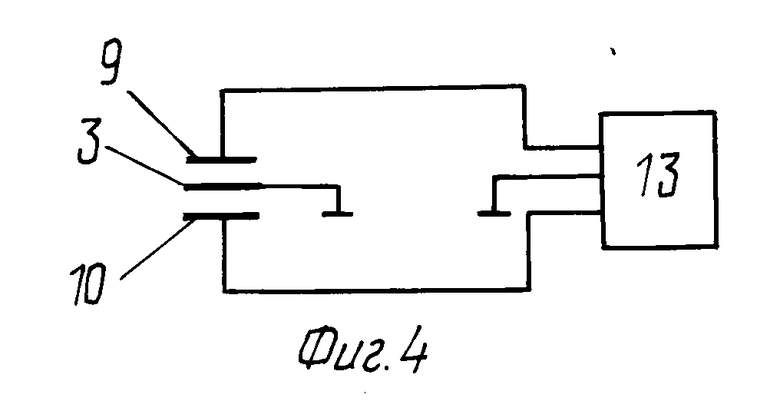
Система возбуждения колебаний рамок содержит генератор 13 возбуждения колебаний и два силовых преобразователя (фиг. 4). Первый силовой преобразователь состоит из подвижного электрода в виде электропроводной поверхности внутренней подвижной рамки 3 и неподвижный электрод в виде металлизированного участка 9 на второй пластине 5. Второй силовой преобразователь содержит подвижный электрод в виде той же электропроводной поверхности внутренней подвижной рамки 3 и неподвижный электрод в виде металлизированного участка 10 на второй пластине 5. Первый выход генератора 13 подключен к металлизированному участку 9, второй выход металлизированному участку 10. Общий провод обоих выходов генератора 13 подключен к электропроводной поверхности внутренней подвижной рамки 3. С выходов генератора 13 поступают однополярные сигналы, отличающиеся по фазе на 180o.
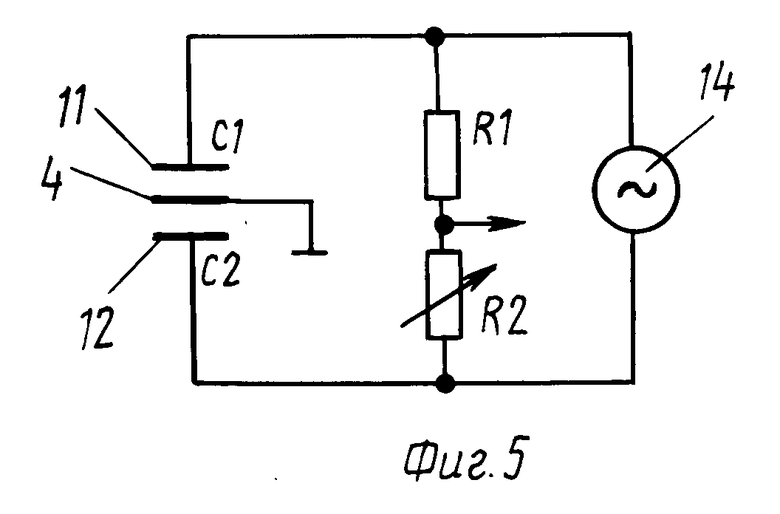
Датчик положения выполнен в виде мостовой схемы из резисторов R1, R2 и дифференциального емкостного преобразователя, состоящего из конденсаторов C1, C2 (фиг. 5). Конденсатор C1 содержит подвижный электрод в виде электропроводной поверхности внешней подвижной рамки 4 и неподвижный электрод, которым является металлизированный участок 11 на второй пластине 5. Конденсатор C2 образован тем же подвижным электродом в виде электропроводной поверхности внешней подвижной рамки 4 и неподвижным электродом в виде металлизированного участка 12 на второй пластине 5. В одну диагональ моста датчика положения включен источник переменной ЭДС 14, сигнал датчика положения снимается с второй диагонали моста.
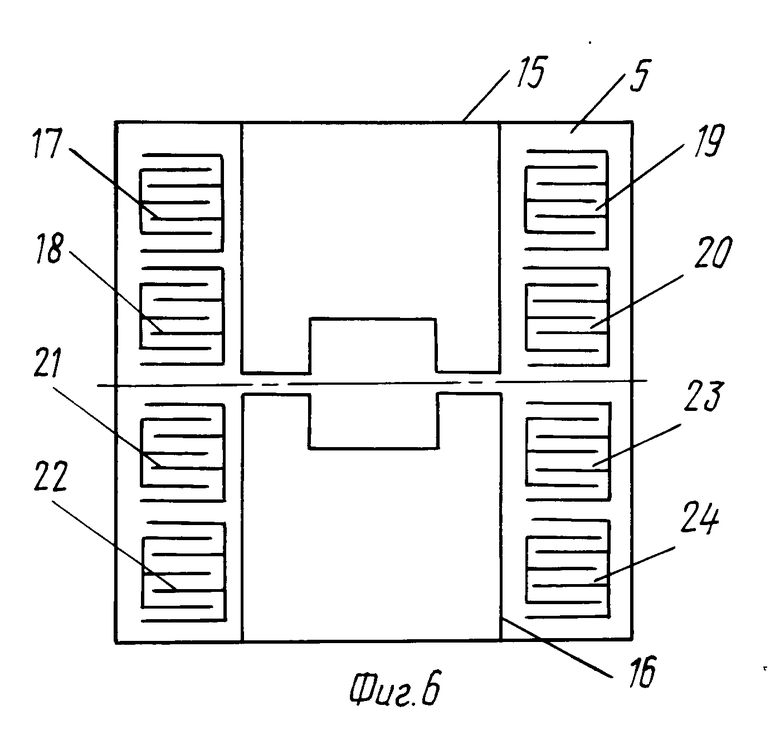
Если элементы датчика положения образованы в виде линий задержки на ПАВ, то подвижными электродами датчика положения являются металлизированные участки или электропроводные поверхности внешней подвижной рамки 4. На фиг. 6 дан пример выполнения на второй пластине 5 неподвижных электродов силовых преобразователей в случае выполнения элементов силовых преобразователей на внешней подвижной рамке 4 и внутренней подвижной рамке 3, а также датчика положения из двух пар линий задержки на ПАВ. Неподвижные электроды в виде металлизированных участков 15, 16 силовых преобразователей на второй пластине 5 расположены так, что их поверхности перекрывают поверхности внешней подвижной рамки 4 и внутренней подвижной рамки 3. Первая линия задержки имеет входной встречно-штыревой преобразователь (ВШП) 17 и выходной ВШП 18, расположенные на второй пластине 5 по одну сторону от второй оси вращения y-y Вторая линия задержки с входным ВШП 19 и выходным ВШП 20 расположена по другую сторону от оси y-y Первая и вторая линии задержки образуют первую пару линий задержки, вторую пару линий задержки составляет третья и четвертая линии задержки. Третья линия задержки имеет входной ВШП 21 и выходной ВШП 22, расположенные по одну сторону от оси y-y вместе с ВШП 17, 18 первой линии задержки. В четвертую линию задержки входят входной ВШП 23 и выходной ВШП 24, расположенные по другую сторону от оси y-y. Первая и третья линии задержки расположены симметрично относительно второй и четвертой линий задержки, причем осью симметрии является ось y-y.
Вторая пластина 5 может быть выполнена из пьезоэлектрического материала. Тогда линии задержки образуются напылением металлического слоя на вторую пластину 5 в качестве подложки с топологией ВШП 17, 24, свойственной преобразователям на ПАВ. Если вторая пластина 5 выполнена из электроизоляционного материала, например силикатного стекла, то предварительно производится напыление на вторую пластину 5 в месте расположения линий задержки пьезоэлектрической пленки, на которой затем образуются ВШП 17, 24. Если материалом второй пластины 5 является кремний, то пьезоэлектрическая пленка наносится на окисленную поверхность кремния или предварительно образованную электроизоляционную подложку.
В случае применения линий задержки на ПАВ в качестве датчика положения расстояние d (фиг. 1) между поверхностями ВШП 17, 24 и ближайшей поверхностью внешней подвижной рамки 4 составляет около разности между четвертью длины волны ПАВ и максимальным суммарным перемещением внешней подвижной рамки 4 в диапазоне измерений угловой скорости и при работе системы возбуждения колебаний.
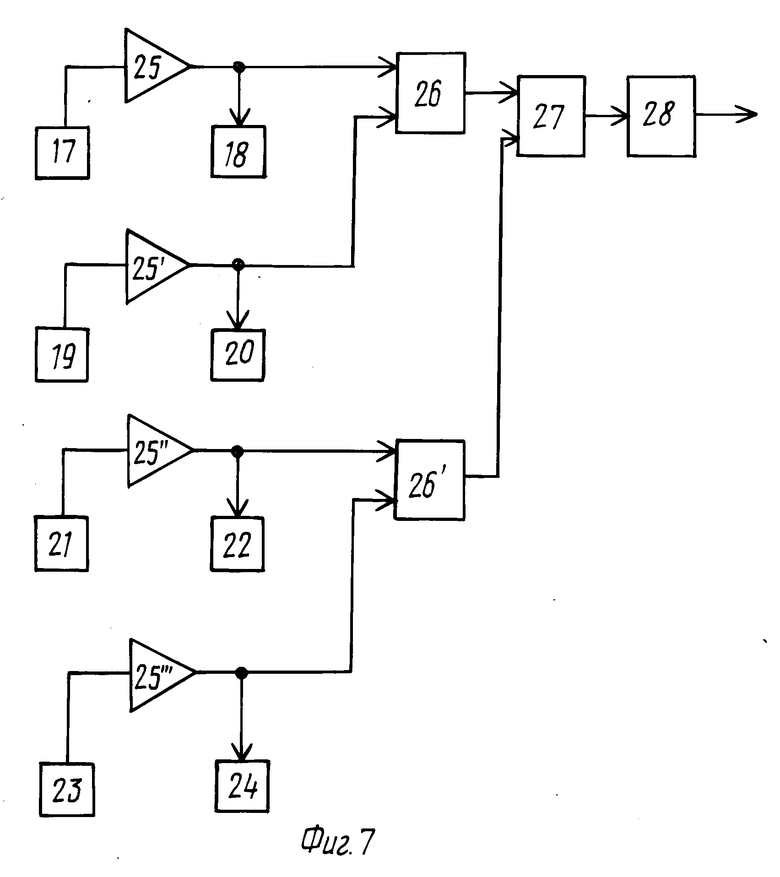
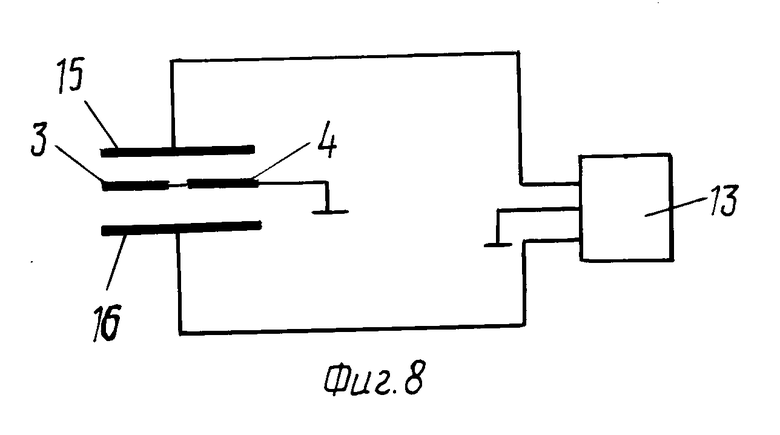
В схеме датчика положения с линиями задержки на ПАВ (фиг. 7) на каждой линии задержки образован свой автогенератор. Первый автогенератор содержит включенный между входным ВШП 17 и выходным ВШП 18 первой линии задержки усилитель 25. Второй автогенератор образован включением усилителя 25' между входным ВШП 19 и выходным ВШП 20 второй линии задержки. Включением усилителя 25" между входным ВШП 21 и выходным ВШП 22 третьей линии задержки образован третий автогенератор. В четвертом автогенераторе между входным ВШП 23 и выходным ВШП 24 четвертой линии задержки включен усилитель 25'". Выходы первого и второго автогенераторов соответственно от усилителей 25 и 25' подключены к двум входам первого смесителя частот 26. К двум входам второго смесителя частот 26 подсоединены выходы третьего и четвертого автогенераторов от усилителей 25", 25'" соответственно. Выходы первого 26 и второй 26 смесителей частот подключены к блоку суммирования частот 27, выход которого соединен с входом частотомера 28. При конфигурации металлизированных участков 15, 16 силовых преобразователей на второй пластине 5 в соответствии с фиг. 6 первый силовой преобразователь системы возбуждения колебаний содержит в качестве подвижного электрода соединенные вместе электропроводные поверхности внутренней подвижной рамки 3 и внешней подвижной рамки 4 (фиг. 8). Неподвижным электродом первого силового преобразователя является металлизированный участок 15 на второй пластине 5. Второй силовой преобразователь имеет подвижный электрод из тех же соединенных вместе электропроводных поверхностей внутренней подвижной рамки 3 и внешней подвижной рамки 4, а также металлизированный участок 16 на второй пластине 5.
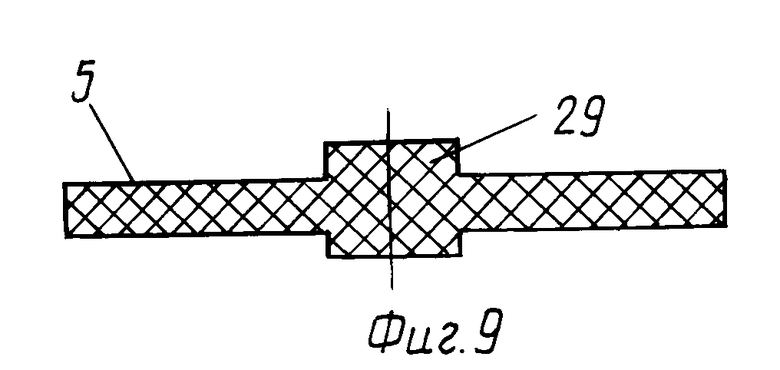
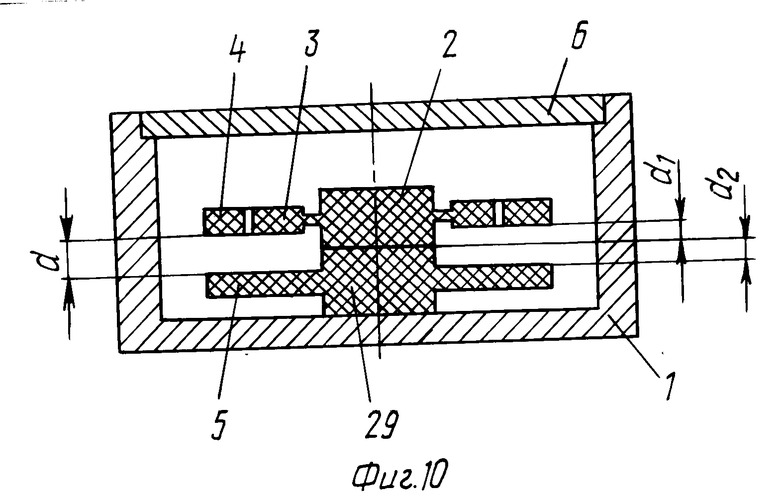
В варианте выполнения второй пластины 5 ее центральная часть 29 имеет большую толщину, чем толщина периферийной части (фиг. 9). При этом утолщенная часть может быть образована так, что поверхности ее торцов могут выходить за поверхности периферийной части второй пластины 5 как с одной из сторон, так и с двух сторон.
В модификации гироскопа (фиг. 10) к основанию 1 прикреплена вторая пластина 5 поверхностью одного из торцов ее утолщенной центральной части 29 первая пластина прикреплена поверхностью торца своей внутренней неподвижной рамки 2 к поверхности второго торца утолщенной центральной части 29 второй пластины 5. Расстояние d, необходимое для функционирования датчика положения на линиях задержки на ПАВ, складывается из суммы варьируемых расстояний d1 и d2 из которых расстояние d1 составляет расстояние от поверхности внешней подвижной рамки 4 до поверхности соединенного с торцом центральной части 29 второй пластины 5 торца внутренней неподвижной рамки 2, расстояние d2 составляет расстояние от поверхности торца центральной части 29, соединенного с торцом внутренней неподвижной рамки 2, до поверхности периферийной части второй пластины 5.
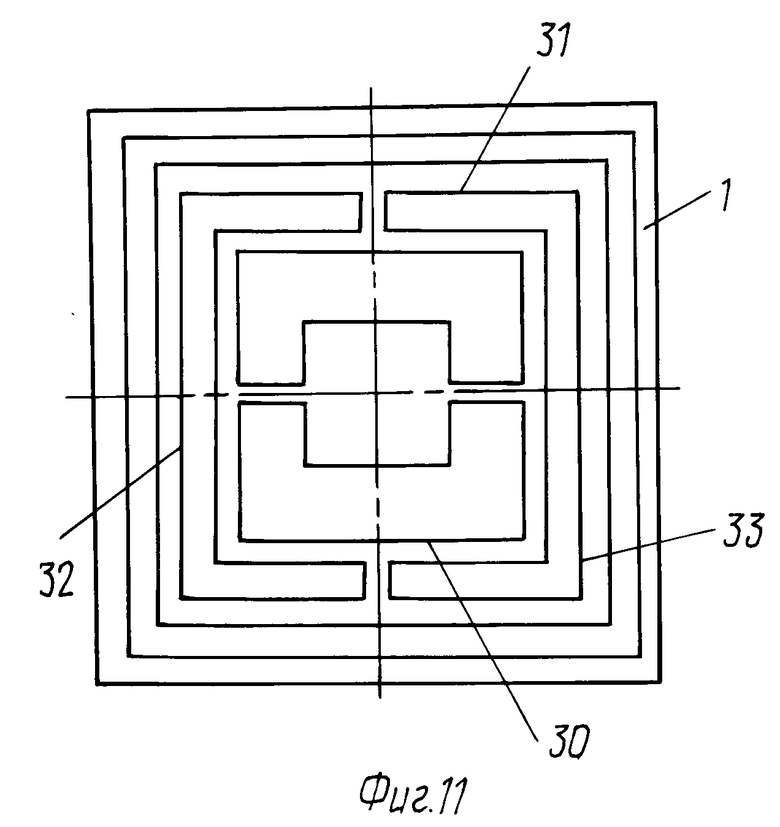
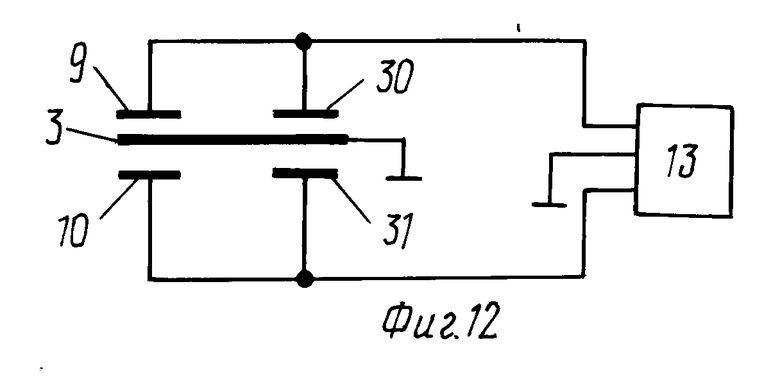
Дополнительные элементы силовых преобразователей и датчика положения на основании 1 (фиг. 11) образованы путем расположения на основании 1 металлизированных участков 30, 31 силовых преобразователей, а также металлизированных участков 32, 33 датчика положения. Тогда первый силовой преобразователь содержит подвижный электрод в виде электропроводной поверхности внутренней подвижной рамки 3 и неподвижный электрод из соединенных вместе металлизированных участков 9, 30 на второй пластине 5 и основании 1 соответственно (фиг. 12). Второй силовой преобразователь состоит из подвижного электрода, которым является та же электропроводная поверхность внутренней подвижной рамки 3, и подвижного электрода, в качестве которого служат соединенные вместе металлизированные участки 10, 31 на второй пластине 5 и основании 1.
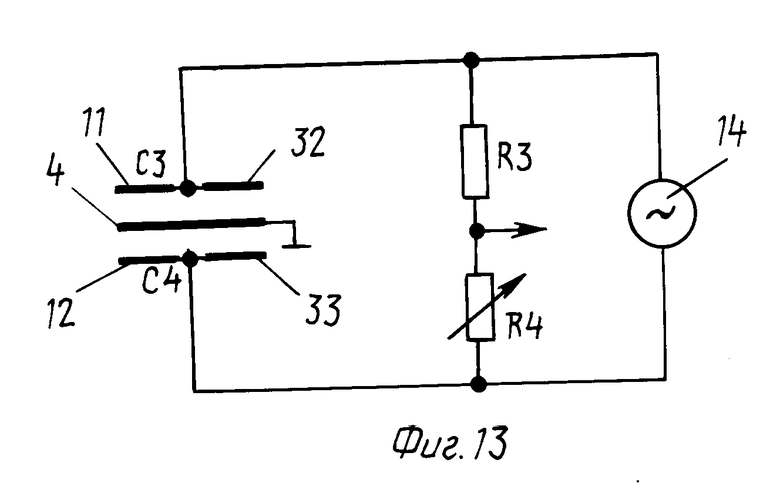
В указанном выполнении гироскопа датчик положения содержит конденсаторы C3, C4 и резисторы R3, R4 (фиг. 13). Конденсаторы C3, C4 имеют общий подвижный электрод, которым является электропроводная поверхность внешней подвижной рамки 4. Неподвижными электродами служат у конденсатора C3 соединенные вместе металлизированные участки 11, 32 соответственно на второй пластине 5 и основании 1, у конденсатора C4 соединенные вместе металлизированные участки 12, 33 на второй пластине 5 и основании 1.
Вибрационный гироскоп работает следующим образом.
При наличии сигнала на первом выходе генератора 13 подвижный электрод первого силового преобразователя в виде электропроводной поверхности внутренней подвижной рамки 3 притягивается электростатической силой к металлизированному участку 9 на второй пластине 5. При этом происходит угловое перемещение относительно оси x-x в одну сторону внутренней подвижной рамки 3 и связанной с ней упругими перемычками 8, 8' внешней подвижной рамки 4, которые вместе образуют ротор гироскопа.
При наличии сигнала на втором выходе генератора 13 подвижный электрод второго силового преобразователя, которым является та же электропроводная поверхность внутренней подвижной рамки 3, притягивается к металлизированному участку 10 на второй пластине 5, и происходит угловое перемещение относительно оси x-x ротора гироскопа в другую сторону.
Таким образом осуществляется колебательное движение ротора вибрационного гироскопа относительно оси x-x и создается переменный кинетический момент ротора, вектор которого направлен по оси x-x.
При наличии угловой скорости по измерительной оси гироскопа, направленной перпендикулярно образованной осями x-x и y-y плоскости, возникает гироскопический момент по оси y-y, вызывающий угловое перемещение относительно оси y-y внешней подвижной рамки 4. Пусть, например, векторы кинетического момента и угловой скорости направлены так, что под действием гироскопического момента внешняя подвижная рамка 4 приближается к второй пластине 5 в месте расположения на ней металлизированного участка 11. В этом случае увеличивается емкость конденсатора C1, уменьшается емкость конденсатора C2, баланс мостовой схемы датчика положения нарушается, и с выхода датчика положения идет сигнал, пропорциональный величине угловой скорости. При изменении направления вектора угловой скорости меняется фаза выходного сигнала датчика положения. Таким образом, с помощью выходного сигнала датчика положения определяются величина и знак угловой скорости.
В датчике положения на линиях задержки на ПАВ при отсутствии угловой скорости и выключенной системе возбуждения колебаний расстояния всех ВШП 17, 24 на второй пластине 5 до электропроводной поверхности внешней подвижной рамки 4 равны и составляют около d = λ/4 - f Это означает, что электропроводная поверхность внешней подвижной рамки 4 на все четыре линии задержки оказывает одинаковое шунтирующее воздействие, вызывающее изменение скорости ПАВ, вследствие закорачивания электропроводным материалом электрического поля пьезоэлектрика, возникающего при прохождении ПАВ. Поэтому частоты всех четырех автогенераторов равны номинальной частоте и при преобразовании частот первого и второго автогенераторов в смесителе частот 26, частот третьего и четвертого автогенераторов в смесителе частот 26' на их выходах получаются разности частот, равные нулю. Суммирование нулевых разностей частот от смесителей частот 26, 26' в блоке суммирования частот 27 также дает нулевую разность частот, которую измеряет частотомер 28. Отсутствие сигнала на выходе частотомера 28 показывает отсутствие угловой скорости. Пусть теперь при работе системы возбуждения колебаний и наличии угловой скорости внешняя подвижная рамка 4 приближается к ВШП 17, 18, 21, 22 первой и третьей линий задержки на второй пластине 5 и удаляется от ВШП 19, 20, 23, 24 третьей и четвертой линий задержки. Тогда расстояние между ВШП 17, 18, 21, 22 первой и второй линий задержки становится еще меньше разности между четвертью длины волны ПАВ и перемещением внешней подвижной рамки 4, частоты первого и третьего автогенераторов увеличиваются, вследствие большего шунтирующего воздействия электропроводной поверхности внешней подвижной рамки 4. Расстояние же между ВШП 19, 20, 23, 24 третьей и четвертой линий задержки становится больше, чем разность между четвертью длины волны ПАВ и перемещением внешней подвижной рамки 4. Вследствие уменьшения шунтирующего воздействия электропроводной поверхности внешней подвижной рамки 4, частоты второго и четвертого автогенераторов уменьшаются. Так как частота первого автогенератора увеличивается, а второго автогенератора уменьшается, то после преобразования в смесителе частот 26 частот этих автогенераторов на выходе смесителя частот 26 получается сигнал разности частот, равный удвоенному значению разности между номинальной частотой и частотой одного автогенератора. Соответственно на выходе смесителя частот 26' имеется сигнал удвоенной разности частот между номинальной частотой и частотой одного из третьего или четвертого автогенератора, полученный после преобразования в смесителе частот 26' частот третьего и четвертого автогенераторов. Суммирование сигналов смесителей частот 26, 26' в блоке суммирования частот 27 дает на его выходе сигнал, равный учетверенному значению разности между номинальной частотой и частотой одного автогенератора. В частотомере 28 измеряется частота с выхода блока суммирования частот 27 и показания частотомера 28 являются выходным сигналом датчика положения гироскопа. Измеряемая частотомером 28 частота пропорциональна измеряемой угловой скорости.
При выполнении металлизированных участков 15, 16 на второй пластине 5 в соответствии с фиг. 6 сигнал с выходов генератора 13 подается поочередно на металлизированные участки 15 и 16 и при этом притягиваются поочередно то к металлизированному участку 15, то к металлизированному участку 16, внутренняя подвижная рамка 3 и внешняя подвижная рамка 4 вместе.
В варианте образования дополнительных элементов силовых преобразователей и датчика положения на основании 1 в соответствии с фиг. 11 при подаче сигнала с первого выхода генератора 13 одна сторона внутренней подвижной рамки 3 притягивается к металлизированному участку 9 на второй пластине 5, а вторая сторона внутренней подвижной рамки 3 притягивается к металлизированному участку 30 на основании 1. Так как металлизированные участки 9, 30 расположены по разные стороны от оси x-x и по разные стороны от поверхностей внутренней подвижной рамки 3, то происходит угловое перемещение относительно оси y-y внутренней подвижной рамки 3. При подаче сигнала с второго выхода генератора 13 на металлизированные участки 10, 31 соответственно на второй пластине 5 и основании 1 происходит угловое перемещение внутренней подвижной рамки 3 в противоположную сторону, так как одна сторона внутренней подвижной рамки 3 притягивается к второй пластине 5, а вторая сторона к основанию 1.
В соответствующем фиг. 11 выполнении датчика положения при измерении угловой скорости пусть, например, происходит приближение внешней подвижной рамки 4 к металлизированному участку 11 на второй пластине 5 и ее удаление от металлизированного участка 12. Так как металлизированные участки 32, 33 на основании расположены по разные стороны от оси y-y, то внешняя подвижная рамка 4 сближается с металлизированным участком 32 и удаляется от металлизированного участка 33. Тогда емкость конденсатора C3 (фиг. 13) увеличивается, емкость конденсатора C4 уменьшается, наступает разбаланс мостовой схемы датчика положения и с его диагонали поступает выходной сигнал гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825145A1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
SU1825140A1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825144A1 |
Использование: в измерительной технике. Сущность изобретения: в вибрационный гироскоп, содержащий корпус, закрепленную в нем пластину с внешней и внутренней рамками, соединенными упругими перемычками и имеющими две взаимно перпендикулярные оси вращения, систему возбуждения колебаний и датчик положения, введена вторая пластина, в первой пластине образованы внутренняя неподвижная, внутренняя подвижная и внешняя подвижная рамки, расположенные соответственно от центра к периферии пластины, внутренняя неподвижная рамка выполнена утолщенной и соединена с второй пластиной, первая пластина закреплена в основании с помощью внутренней неподвижной рамки, элементы силовых преобразователей и датчика положения расположены на внешней подвижной и внутренней подвижной рамках и второй пластине. 6 з.п. ф-лы, 13 ил.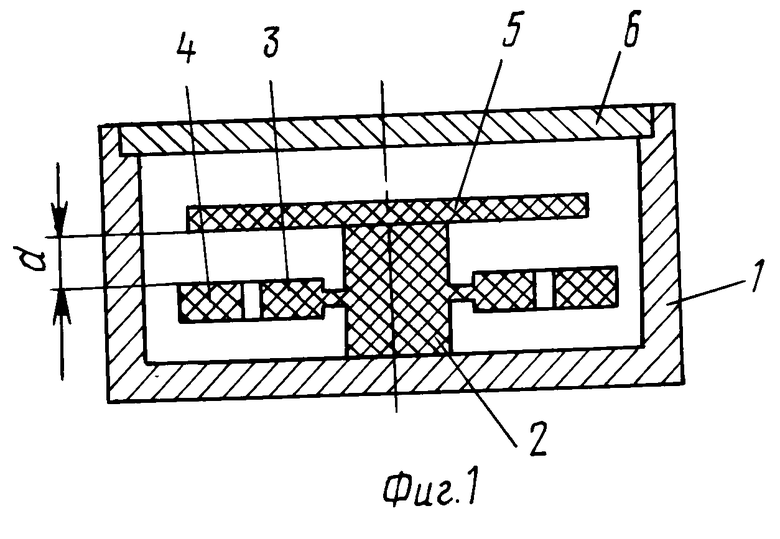
d = λ/4 - f,
где λ - длина волны;
f максимальное суммарное перемещение внешней подвижной рамки в диапазоне измерений и при работе системы возбуждения колебаний.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бороздин В.Н | |||
| Гироскопические приборы и устройства систем управления | |||
| - М.: Машиностроение, 1990, с | |||
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| GB, патент, 2156523, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
