Предпосылки изобретения
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к бесступенчатой коробке передач, в частности к бесступенчатой коробке передач для транспортного средства.
2. Уровень техники
Транспортные средства изменяют режим привода с ручного переключения скоростей на автоматическое переключение скоростей благодаря приложению на транспортных средствах бесступенчатых коробок передач. Так как транспортные средства с автоматическим переключением скоростей удобны в работе, имеют плавное ускорение и безопасный привод, к ним возрастает интерес со стороны покупателей автомобилей. Бесступенчатые передачи известного уровня техники для достижения автоматического переключения скоростей содержат гидравлические автоматические коробки передач и бесступенчатые коробки передач типа металлического ремня. Эти две коробки передач имеют много недостатков, которые подробно будут описаны ниже.
Гидравлические автоматические коробки передач содержат гидравлические муфты и гидротрансформаторы крутящего момента. Гидравлическая муфта работает на основании следующего принципа: источник энергии приводит во вращение его крыльчатку насоса, так что крыльчатка насоса прогоняет жидкость между лопастей вращающейся крыльчатки насоса. В результате этого, энергия от источника энергии передается жидкости, так что возрастает кинетическая энергия жидкости. Когда жидкость с возросшей кинетической энергией поступает в пространства между соответствующими лопастями рабочего колеса, часть кинетической энергии, содержащейся в жидкости, передается к рабочему колесу, которое вращается медленнее, чем крыльчатка насоса, так что рабочее колесо выдает на выходе крутящий момент. Для увеличения выходного крутящего момента от рабочего колеса дополнительно устанавливают реактор, который вращается в одном направлении, между крыльчаткой насоса и рабочим колесом, так чтобы сконфигурировать гидротрансформатор крутящего момента.
Гидротрансформатор крутящего момента может уравновесить некоторые недостатки механически управляемой ступенчатой коробки передач и имеет ряд важных преимуществ. Например, транспортное средство с гидротрансформатором крутящего момента является простым в работе, нетрудоемким в изготовлении, а также обладает повышенными безопасностью и комфортом привода и при наборе ускорения снижает вредный выброс, чтобы соответствовать требованию защиты окружающей среды. Более того, поскольку источник энергии и зубчатая передача гибко связаны, удлиняется срок службы транспортного средства. Наконец, транспортное средство обладает высокой приспособляемостью, способствующей повышенной приспособляемости к различным дорожным поверхностям. Однако гидротрансформатор крутящего момента имеет следующие очевидные недостатки.
1. Поскольку гидротрансформатор крутящего момента имеет малый диапазон изменения скорости и малый диапазон изменения крутящего момента, так что он не может отдельно удовлетворить потребность применения транспортного средства, он обязательно соединен параллельно или последовательно с механически управляемой коробкой передач, взаимодействующей с ним. Кроме того, для достижения автоматического переключения скоростей механически управляемой коробки передач необходимо предусмотреть гидравлическую или электрическую систему управления. Поэтому соответствующая конструкция является сложной, а ее производственные расходы являются высокими.
2. Поскольку энергия передается жидкостью в качестве передающей среды, к.п.д. передачи является низким и потеря энергии является большой, так что транспортное средство ограничивается экономичным использованием топливной нефти.
3. Поскольку коробка передач имеет сложную конструкцию, ее трудно обслуживать. Поэтому требуется специальный обслуживающий персонал, который имеет высокий уровень обслуживания и обладает способностью к проверке неисправной работы и анализу, требующихся для обслуживания. В результате, стоимость обслуживания является высокой.
Китайский патент №1.136.108С, опубликованный 28 января 2004 г., раскрывает гидравлическую автоматическую систему передачи, содержащую гидротрансформатор крутящего момента для связывания через текучую среду двигателя и коробки передачи, первичную часть переключения скоростей, размещенную на первом валу, вторичную часть переключения скоростей, размещенную на втором валу, устройство передачи энергии (состоящее из четырех зубчатых колес передачи энергии), для передачи энергии вращения от первичной части переключения скоростей ко вторичной части переключения скоростей, первый, второй и третий тормоза и сцепления для управления первичной частью переключения скоростей, первое и второе односторонние сцепления. Гидротрансформатор крутящего момента состоит из крыльчатки насоса, рабочего колеса, реактора, размещенного между крыльчаткой насоса и рабочим колесом крыльчатки насоса. Рабочее колесо, крыльчатка насоса и реактор образуют гидротрансформатор крутящего момента. Хотя вышеупомянутая автоматическая система передачи имеет ряд преимуществ над известной системой, она, тем не менее, имеет и много недостатков, упомянутых выше.
Бесступенчатая коробка передач типа металлического ремня работает на основании следующего принципа: выход энергии от источника энергии передается к ведущему рабочему колесу устройства бесступенчатого изменения скорости, а ведущее рабочее колесо передает энергию ведомого колеса через V-образный металлический ремень. После этого энергия передается к колесам транспортного средства через промежуточный редуктор скорости, главный редуктор скорости и дифференциал. Устройство передачи типа металлического ремня в коробке передачи является сердцевиной коробки передачи и содержит ведущее рабочее колесо, ведомое рабочее колесо и V-образный металлический ремень, соединяющий ведущее рабочее колесо и ведомое рабочее колесо. Каждое из ведущего рабочего колеса и ведомого рабочего колеса образовано стационарным коническим диском и подвижным коническим диском, собранным соосно. Стационарный конический диск и подвижный конический диск образуют V-образную канавку, с которой зацепляется V-образный металлический ремень, так что V-образный металлический ремень передает энергию под воздействием прижимающей силы стационарного конического диска и подвижного конического диска. Когда подвижные конические диски ведущего рабочего колеса и ведомого рабочего колеса смещаются в осевом направлении во время работы, изменяется радиус металлического ремня, так что изменяется передаточное число. Подвижный конический диск смещается в осевом направлении посредством регулировки гидравлического масла внутри цилиндров для ведущего рабочего колеса и ведомого рабочего колеса, которые, в свою очередь, подвергаются управлению посредством механико-гидравлической или электро-гидравлической системы управления. Поскольку давление гидравлического масла может регулироваться непрерывно, коробка передач может быть также способна к бесступенчатому изменению скорости.
При наличии автоматической бесступенчатой коробки передач типа металлического ремня транспортное средство приобретает преимущества, заключающиеся в превосходной кинетической характеристике, удобстве в работе и высоком к.п.д. коробки передач. Кроме того, источник энергии может всегда работать внутри экономичного диапазона скорости его вращения, так что у транспортного средства резко возрастает экономичное использование топливной нефти и улучшается выхлоп. Однако коробка передач все-таки имеет следующие непреодолимые недостатки.
1. Поскольку энергия передается посредством трения между металлическим ремнем, а также ведущим и ведомым рабочими колесами, может иметь место проскальзывание между металлическим ремнем, а также ведущим и ведомым рабочими колесами, так что не может быть передана движущая энергия большой величины или большого крутящего момента. Поэтому коробка передач не может согласовать источник энергии с большим рабочим объемом цилиндров двигателя. В настоящее время коробка передач используется только в автомобилях со средним или малым рабочим объемом цилиндров двигателя, поэтому диапазон ее приложения является ограниченным.
2. Транспортное средство с коробкой передач имеет низкую пусковую характеристику. Если водитель хочет получить резкое ускорение транспортного средства, коробка передач не может быстро среагировать на такой режим, поскольку требуется время на изменение диаметров рабочих колес. Кроме того, поскольку транспортному средству требуется большой пусковой крутящий момент, ему потребуются пусковые устройства, такие как многодисковые сцепления, работающие в масляной ванне, электромагнитные сцепления и гидротрансформаторы крутящего момента. В результате чего, конструкция коробки передач становится очень сложной.
3. Изготовление металлического ремня является трудоемким, расходы - высокими. Поэтому необходимо специальное оборудование для изготовления, и степень смены оборудования является высокой.
Китайская выложенная заявка на патент №1.442.623, опубликованная 17 сентября 2003 г., раскрывает механически управляемую фрикционную бесступенчатую коробку передач типа металлического ремня, имеющую вышеупомянутые недостатки.
Более того, патент США №6.062.096 раскрывает бесступенчатую коробку передач, которая передает крутящий момент посредством использования качающихся рычагов. Эксцентриковые массы установлены на концах качающихся рычагов. Вход приводит во вращение эксцентриковые массы вокруг их соответствующих осей. Центробежные силы, образованные при вращении эксцентриковых масс, заставляют качающиеся рычаги колебаться. Хотя эта коробка передач преодолевает некоторые недостатки, присущие вышеупомянутым двум коробкам передач, она имеет все-таки следующие недостатки.
1. Поскольку качающиеся рычаги колеблются во время работы, для обеспечения того, чтобы выходной вал всегда выдавал на выходе скорость в одном направлении, требуется, чтобы два односторонних сцепления, которые имеют соответствующие блокирующие направления, противоположные друг другу, были расположены на втулках, непосредственно соединенных с качающимися рычагами, и чтобы был установлен набор зубчатых колес обратного хода для реверсирования выхода скорости вращения из одного из односторонних сцеплений, так чтобы обеспечить, чтобы односторонние сцепления выдавали на выходе скорость в том же самом направлении. Поэтому выходной крутящий момент попеременно выдается через два односторонних сцепления. В результате этого, конструкция коробки передачи получается громоздкой и сложной, и когда выходная скорость является высокой, колеблющиеся качающиеся рычаги подвергаются воздействию большой силы инерции, тем самым обусловливая высокие требования к материалам и точности изготовления ее качающихся рычагов и подшипников.
2. Поскольку одностороннее сцепление не установлено между трансформатором крутящего момента и первичным движителем, часть кинетической энергии, накопленной в эксцентриковых массах, передается назад к первичному движителю, так чтобы вызвать циркуляцию энергии, тем самым влияя на эффективное воздействие рабочей характеристики коробки передач.
3. Поскольку эксцентриковые массы изменяются при изменении фаз эксцентриковых масс, так чтобы регулировать выходной крутящий момент и скорость вращения, требуется дополнительный ручной или автоматический управляющий механизм. Если принят ручной управляющий механизм, потребуется обязательная ручная регулировка фаз эксцентриковых масс, но не может быть выполнена автоматическая регулировка. Если добавляется автоматический управляющий механизм, потребуется сложная система обратной связи, которая значительно увеличивает производственные расходы.
4. Одностороннее сцепление на выходной части коробки передач представляет собой радиально зацепляющееся сцепление с эксцентриковым роликом линейного контакта, причем одностороннее сцепление, имеющее такую конструкцию, обладает не только недостаточно высокой характеристикой чувствительности, поскольку на эксцентриковые ролики влияют центробежные силы, образованные соответственно при вращении, но и также требуется большой момент во время выключения сцепления и расходуется большое количество энергии, которое снижает к.п.д. коробки передач. Кроме того, эксцентриковые ролики имеют линейный контакт как с внутренним кольцом, так и с внешним кольцом, износостойкость сцепления является низкой, так что оно не может передавать большой крутящий момент и имеет низкий срок службы. Поэтому низкий срок службы имеет вся коробка передач.
Патент США №6.044.718, который был выдан по заявке с частичным продолжением и является развитием патента №6.062.096, дополнительно раскрывает новое решение в дополнение к первоначальным решениям. Однако дополнительно раскрытое решение, по существу, аналогично первоначальным решениям. В дополнительном решении механизм качающихся рычагов, по существу, не изменился, а односторонние сцепления, имеющие соответствующие блокирующие направления, противоположные друг другу, все еще требуют размещения на втулках, непосредственно соединенных с качающимися рычагами. Дополнительное решение отличается от других тем, что одно сцепление односторонних сцеплений посажено между втулками качающихся рычагов и базовой рамой. Одно сцепление ограничивает, таким образом, размах качающихся рычагов в одном направлении, так что качающиеся рычаги могут только колебаться скачкообразно в другом направлении. Коробка передач не только имеет вышеупомянутые недостатки, но и ухудшенное рабочее состояние одностороннего сцепления, посаженного между качающимися рычагами и базовой рамой, поскольку базовая рама является стационарной и одностороннее сцепление несет большую нагрузку, чтобы ограничить размах качающихся рычагов в одном направлении. В результате этого, эксцентриковые ролики сцепления плотно вклиниваются во втулки качающихся рычагов и соответствующее отверстие рамы, поэтому будет более трудно выключить сцепление и потребляется больше энергии, оказывается более значительным износ сцепления и значительно сокращается срок его службы.
Сущность изобретения
Целью настоящего изобретения является преодоление некоторых из вышеупомянутых недостатков известного уровня техники. Объектом настоящей заявки является механически управляемая бесступенчатая автоматическая коробка передач, которая может автоматически регулировать выходную скорость и момент, зависящие от величины приложенной нагрузки к ней, так чтобы реализовать функцию бесступенчатого автоматического изменения скорости. Более того, коробка передач имеет простую конструкцию, высокий к.п.д. передачи и большой срок службы. Кроме того, коробка передач может быть приложена к рабочему состоянию высокой скорости вращения и может эффективно передавать большую энергию и движущую энергию с большим крутящим моментом, так что она может быть использована в различных транспортных средствах и имеет широкий диапазон приложения.
Механически управляемая бесступенчатая автоматическая коробка передач содержит корпус и механизм преобразования крутящего момента, установленный в корпусе. Механизм преобразования крутящего момента содержит входную часть, вращающийся или роторный носитель, по меньшей мере, одну эксцентриковую сборку, которая поворотно установлена на носителе, и выходную часть. Входная часть и носитель могут вращаться независимо друг от друга и имеют соответствующие оси вращения, которые являются коллинеарными. Каждая из, по меньшей мере, одной эксцентриковой сборки содержит эксцентриковую массу, которая приводится в движение с возможностью вращения вокруг ее оси вращения посредством входной части. Выходная часть снабжена только одним односторонним сцеплением, непосредственно соединенным с ней, и одно одностороннее сцепление является первым односторонним сцеплением. Первое одностороннее сцепление является односторонним сцеплением осевого сжатия с поверхностным контактом с ведущей частью и ведомой частью, установленными на оси. Когда ведущая часть и ведомая часть зацепляются друг с другом, поверхности зацепления элементов зацепления ведущей части и ведомой части примыкают друг к другу, так чтобы передать момент посредством силы трения между ними.
Механически управляемая бесступенчатая автоматическая коробка передач согласно настоящему изобретению дополнительно содержит следующие дополнительные признаки.
В другом усовершенствованном воплощении настоящего изобретения коробка передач дополнительно содержит второе одностороннее сцепление, размещенное на переднем конце механизма преобразования крутящего момента, которое имеет входную часть, связанную с источником энергии, и выходную часть, связанную со входной частью механизма преобразования крутящего момента.
В еще одном усовершенствованном воплощении настоящего изобретения коробка передач дополнительно содержит третье одностороннее сцепление, размещенное на заднем конце первого одностороннего сцепления, причем третье одностороннее сцепление имеет блокирующее направление, противоположное блокирующему направлению первого одностороннего сцепления, и имеет подвижную часть, связанную с выходной частью первого одностороннего сцепления, и стационарную часть, зафиксированную в корпусе.
В предпочтительном воплощении настоящего изобретения механизм преобразования крутящего момента содержит носитель, и, по меньшей мере, одна эксцентриковая сборка содержит две эксцентриковых сборки, симметрично установленные на двух концах носителя. Каждая из двух эксцентриковых сборок содержит ведомый вал, а эксцентриковая масса и ведомое зубчатое колесо установлены на ведомом валу. Эксцентриковые массы и ведомые зубчатые колеса шарнирно установлены на двух концах носителя посредством ведомых валов. Входная часть механизма преобразования крутящего момента содержит ведущий вал и ведущее зубчатое колесо, установленное на ведущем валу. Ведущий вал связан с источником энергии или вторым односторонним сцеплением, а ведущее зубчатое колесо зацепляется с ведомыми зубчатыми колесами. Выходная часть является выходным валом, зафиксированным в центре носителя, а ведущая часть первого одностороннего сцепления связана с выходным валом.
В другом предпочтительном воплощении настоящего изобретения механизм преобразования крутящего момента содержит носитель, и, по меньшей мере, одна эксцентриковая сборка содержит три эксцентриковые сборки, установленные на носителе с одинаковыми интервалами в круговом направлении его. Каждая из трех эксцентриковых сборок содержит ведомый вал, а эксцентриковая масса и ведомое зубчатое колесо установлены на ведомом валу. Носитель представляет собой дискообразное тело, а эксцентриковые массы и ведомые зубчатые колеса шарнирно установлены на кромке носителя посредством ведомых валов. Входная часть механизма преобразования крутящего момента содержит ведущий вал и ведущее зубчатое колесо, установленное на ведущем валу. Ведущий вал связан с источником энергии или вторым односторонним сцеплением, и ведущее зубчатое колесо зацепляется с ведомыми зубчатыми колесами. Выходная часть является выходным валом, зафиксированным в центре носителя, а ведущая часть первого одностороннего сцепления связана с выходным валом.
В предпочтительном воплощении настоящего изобретения первое одностороннее сцепление является односторонним сцеплением винтового пресса, которое зацепляется посредством винтового прижатия. Одностороннее сцепление винтового пресса содержит барабан сцепления, а также первый и второй фрикционные диски, размещенные на барабане сцепления и параллельные друг другу, по меньшей мере, одну фрикционную плату барабана и, по меньшей мере, одну пружину. Первый и второй фрикционные диски захватывают, по меньшей мере, одну фрикционную плату барабана под воздействием, по меньшей мере, одной пружины, а, по меньшей мере, одна фрикционная плата барабана посажена на втулке и связана с барабаном сцепления таким образом, что может быть передан крутящий момент. Втулка имеет внутреннюю резьбу, а передающий крутящий момент вал выступает во втулку и имеет конец, выступающий во втулку, который образован с наружной резьбой, зацепляющейся с внутренней резьбой.
В вышеупомянутом предпочтительном воплощении настоящего изобретения, по меньшей мере, одна фрикционная плата барабана содержит множество фрикционных плат барабана, и дисковая фрикционная плата размещена между каждыми двумя смежными фрикционными платами барабана. Дисковая фрикционная плата посажена на втулке и связана со втулкой таким образом, что может быть передан крутящий момент. Барабан сцепления, первый и второй фрикционные диски, фрикционные платы барабана, втулка и дисковая фрикционная плата имеют соответствующие оси вращения, которые коллинеарны. Фрикционные платы барабана посажены на шлицах на барабане сцепления, а дисковая фрикционная плата также посажена на шлицах на втулке. Барабан сцепления имеет один открытый конец и другой конец, образованный простирающимся в направлении наружу пустотелым валом в центральной части его. Первый фрикционный диск зафиксирован на передающем валу и установлен на открытом конце барабана сцепления посредством первого пружинящего стопорного кольца. Второй фрикционный диск выполнен за одно целое со втулкой и установлен на передающем валу посредством второго пружинящего стопорного кольца. В барабане сцепления предусмотрена только одна пружина. Одна пружина представляет собой платообразную нажимную пружину, посаженную на передающем валу и расположенную между вторым пружинящим стопорным кольцом и вторым фрикционным диском. Конец передающего вала, выступающий во втулку, установлен в пустотелом вале через подшипник.
В другом предпочтительном воплощении настоящего изобретения первое одностороннее сцепление является односторонним сцеплением посредством сжатия 4-стержневого механизма связи, который зацепляется посредством сжатия 4-стержневого механизма связи. Одностороннее сцепление посредством сжатия 4-стержневого механизма связи содержит корпус, образованный из фрикционного диска и крышки сцепления, объединенные или покрытые вместе, раструб сцепления, множество фрикционных плат раструба и, по меньшей мере, один 4-стержневой механизм связи посредством сжатия, расположенный в корпусе. Сквозное отверстие образовано в центральном участке крышки сцепления, и конец раструба сцепления остается открытым со стороны сквозного отверстия. Фрикционные платы раструба имеют форму круглого кольца, посажены на раструбе сцепления и связаны между собой так, что может быть передан крутящий момент. Число наборов, по меньшей мере, одного набора дисковых фрикционных плат и число, по меньшей мере, одного 4-стержневого механизма связи посредством сжатия является тем же самым, а каждый набор, по меньшей мере, одного набора дисковых фрикционных плат содержит множество фрикционных плат, имеющих форму части круглого кольца, которые установлены так, чтобы чередоваться с фрикционными платами раструба. Каждый из, по меньшей мере, одного 4-стержневого механизма связи посредством сжатия имеет поперечный стержень, каждый набор, по меньшей мере, одного набора дисковых фрикционных плат имеет сквозное отверстие в том же самом положении соответствующих дисковых фрикционных плат, и поперечные стержни проходят соответственно через сквозные отверстия. 4-стержневые механизмы связи прижимают дисковые фрикционные платы и фрикционные платы раструба к поверхности трения фрикционного диска.
В вышеупомянутом предпочтительном воплощении настоящего изобретения каждый из, по меньшей мере, одного 4-стержневого механизма связи посредством сжатия содержит два поддерживающих рычага, параллельные друг другу, и поперечный стержень, соединяющий два поддерживающих рычага. Два поддерживающих рычага имеют концы, шарнирно установленные соответственно на корпусе посредством соединительных штифтов, и другие концы, шарнирно установленные соответственно на соединительных брусках посредством соединительных штифтов, а поперечный стержень имеет два конца, которые зафиксированы на соединительных брусках посредством соединительных штифтов. Пружина посажена на конце поперечного стержня, а прижимающий брусок размещен на другом конце поперечного стержня, и прижимающий брусок шарнирно установлен на соединительном штифте. Каждый набор, по меньшей мере, одного набора дисковых фрикционных плат дополнительно снабжен двумя сквозными отверстиями, через которые соответственно проходят два цилиндрических штифта, так что соответствующие дисковые фрикционные платы соединены последовательно. Фрикционный диск и крышка сцепления соответственно образованы с двумя продольными канавками, простирающимися соответственно в круговом направлении. Два конца каждого из двух цилиндрических штифтов введены в продольные канавки, каждый из концов двух цилиндрических штифтов снабжен двумя плоскостями, параллельными друг другу, а каждая из продольных канавок снабжена двумя плоскостями, параллельными друг другу, и две плоскости каждого из концов сопрягаются с соответствующими двумя плоскостями каждой из продольных канавок. Фрикционные платы раструба посажены на шлицах на раструбе сцепления. Передающий вал установлен в центре фрикционного диска и имеет конец, выступающий в направлении наружу, и другой конец, установленный в центральном отверстии раструба сцепления через подшипник. По меньшей мере, один 4-стержневой механизм связи посредством сжатия содержит три 4-стержневых механизма связи посредством сжатия, размещенные на корпусе, по меньшей мере, один набор дисковых фрикционных плат содержит три набора дисковых фрикционных плат, размещенных соответственно в корпусе, три 4-стержневых механизма связи посредством сжатия и три набора дисковых фрикционных плат установлены с одинаковыми интервалами в круговом направлении.
Механически управляемая бесступенчатая автоматическая коробка передач согласно настоящей заявке на патент имеет следующие преимущества относительно известного уровня техники.
1. Поскольку механически управляемая коробка передач передает крутящий момент посредством изменения момента количества движения эксцентриковой массы, выходная скорость вращения и момент могут быть автоматически отрегулированы в зависимости от величины нагрузки без другого ручного управления или электронной системы обратной связи. Реализуется, в действительности, не только функция автоматического бесступенчатого изменения скорости, но и упрощается также конструкция коробки передачи, снижаются производственные расходы на коробку передач.
2. Коробка передач настоящего изобретения имеет не только высокий к.п.д. передачи, но и также эффективно передает большую энергию и движущую энергию с большим крутящим моментом. Поскольку энергия передается посредством эксцентриковой массы в качестве передающей среды, которая отличается от случая, где энергия передается посредством текучей среды в качестве передающей среды, повышается не только к.п.д. коробки передач, но и обеспечивается возможность передачи большой энергии и большого крутящего момента. Поэтому коробка передач может быть приложена как к автомобилям со средним или небольшим рабочим объемом цилиндров двигателя, так и к тяжелым транспортным средствам с большим рабочим объемом цилиндров двигателя. Коробка передач может найти широкое применение. Коробка передач настоящего изобретения обладает несравненными преимуществами относительно гидротрансформатора крутящего момента и бесступенчатой автоматической коробки передач типа металлического ремня.
3. Механизм преобразования крутящего момента коробки передач настоящего изобретения является более приемлемым в отношении конструкции и рабочих условий. Выход носителя коробки передач согласно настоящему изобретению снабжен лишь одним однонаправленным сцеплением, непосредственно связанным с ним, чтобы получить однонаправленный крутящий момент и выход скорости без носителя преобразования крутящего момента, обязательно ограниченного необходимостью колебаться и наличием двух однонаправленных сцеплений, а также реверсивного механизма, размещенного на выходе носителя. Таким образом, улучшаются не только рабочие условия носителя механизма преобразования крутящего момента, так что не только лучше реализуется функция автоматического бесступенчатого изменения скорости, но и сила инерции, воздействию которой подвергается носитель механизма преобразования крутящего момента, так что значительно снижается требование к прочности компонент коробки передач. Поэтому коробка передач настоящего изобретения может быть использована для высокоскоростного двигателя, работающего со скоростью до 6.000 об/мин.
4. Может быть получено большее соотношение преобразования крутящего момента с коробкой передач настоящего изобретения, и коробка передач настоящего изобретения имеет больший к.п.д. передачи. Поскольку однонаправленное сцепление также расположено между двигателем и входом в механизм преобразования крутящего момента, можно подтвердить, что кинетическая энергия, накопленная в эксцентриковой сборке, не может быть передана назад к двигателю, так что к нагрузке может быть передано больше энергии. Поэтому соотношение преобразования крутящего момента всей коробки передач становится больше, к.п.д. передачи всей коробки передач - выше, а конструкция всей коробки передач становится более привлекательной.
5. В настоящем изобретении принято однонаправленное сцепление осевого сжатия с поверхностным контактом. Однонаправленное сцепление не только имеет характеристику чувствительности, удовлетворяющую требованию двигателя, работающего на высокой скорости, но оно также может передать большой крутящий момент, имеет высокий к.п.д. передачи и большой срок службы. Поэтому, в целом, коробка передач становится стабильной и надежной в отношении рабочих характеристик, имеет низкую степень отказа и большой срок службы.
Краткое описание чертежей
Признаки и преимущества настоящего изобретения будут дополнительно пояснены подробными его воплощениями, взятыми в сочетании с сопроводительными чертежами, в которых:
фиг.1А - схематическая блок-диаграмма конфигурации системы привода транспортного средства, показывающая общее положение установки бесступенчатой автоматической коробки передач согласно настоящему изобретению.
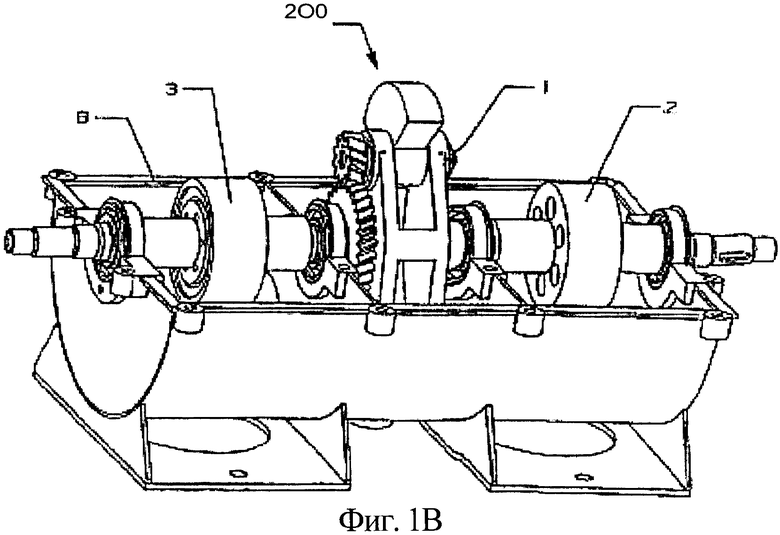
Фиг.1В - вид в перспективе механической конфигурации бесступенчатой автоматической коробки передач согласно настоящему изобретению.
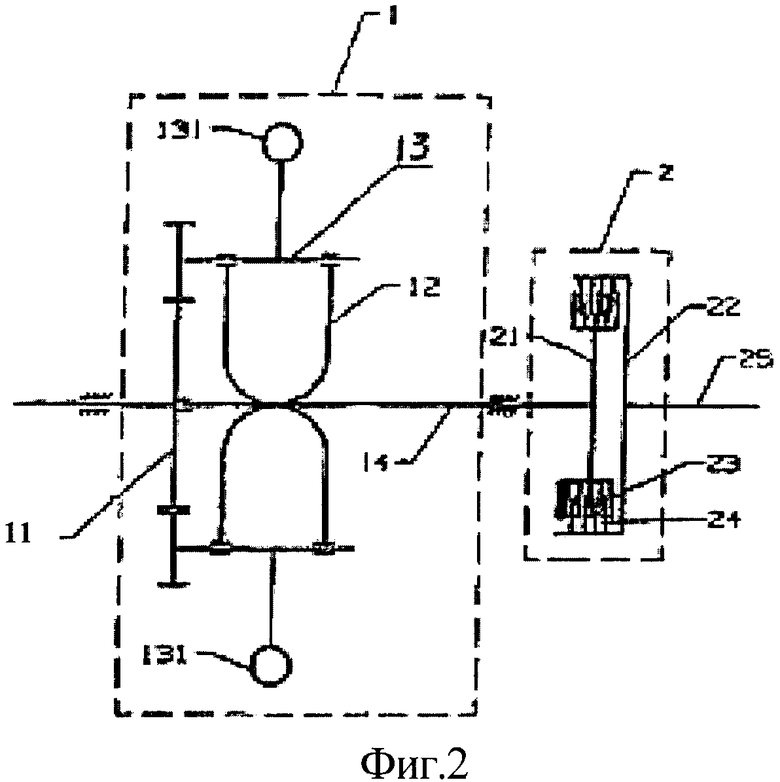
Фиг.2 - схематическая блок-диаграмма предпочтительного воплощения настоящего изобретения, показывающая базовую конфигурацию.
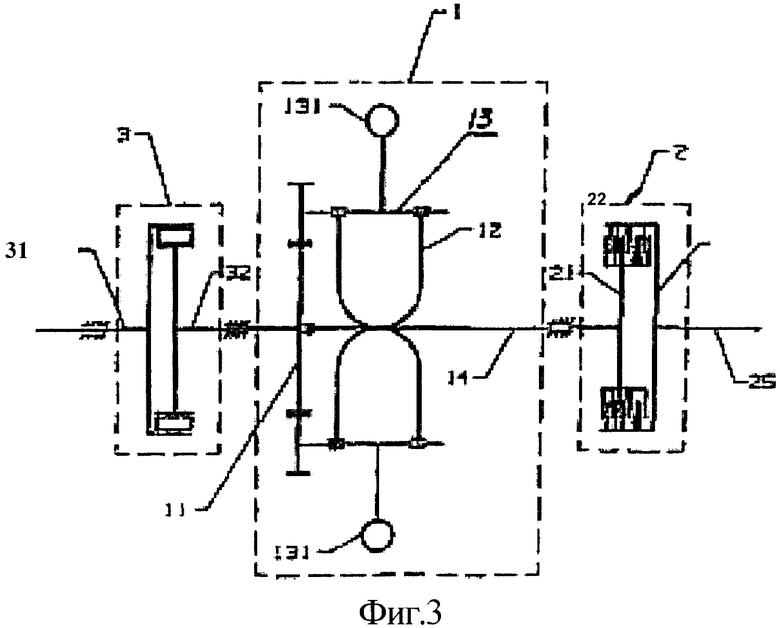
Фиг.3 - схематическая блок-диаграмма другого предпочтительного воплощения настоящего изобретения, показывающая базовую конфигурацию, в которой добавлено второе одностороннее сцепление на основании предпочтительного воплощения, показанного на фиг.2.
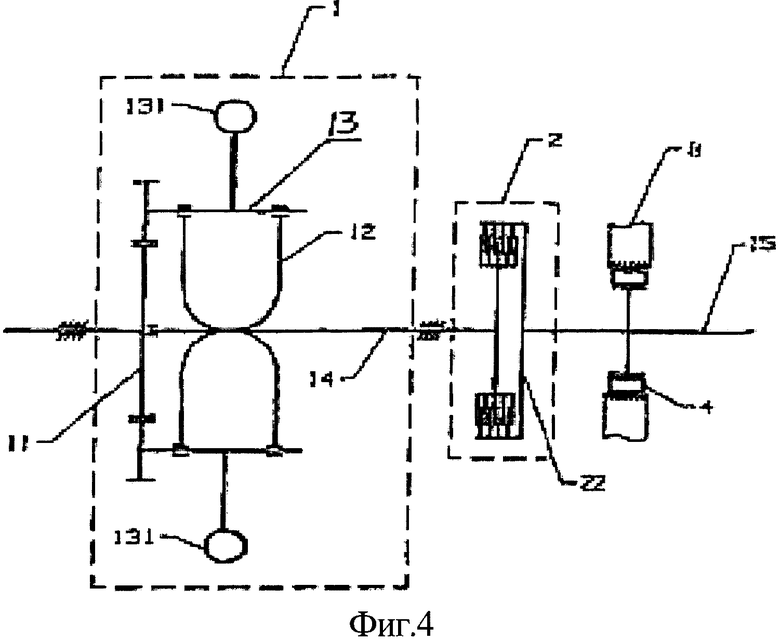
Фиг.4 - схематическая блок-диаграмма другого предпочтительного воплощения настоящего изобретения, показывающая базовую конфигурацию, в которой добавлено третье одностороннее сцепление на основании предпочтительного воплощения, показанного на фиг.2.
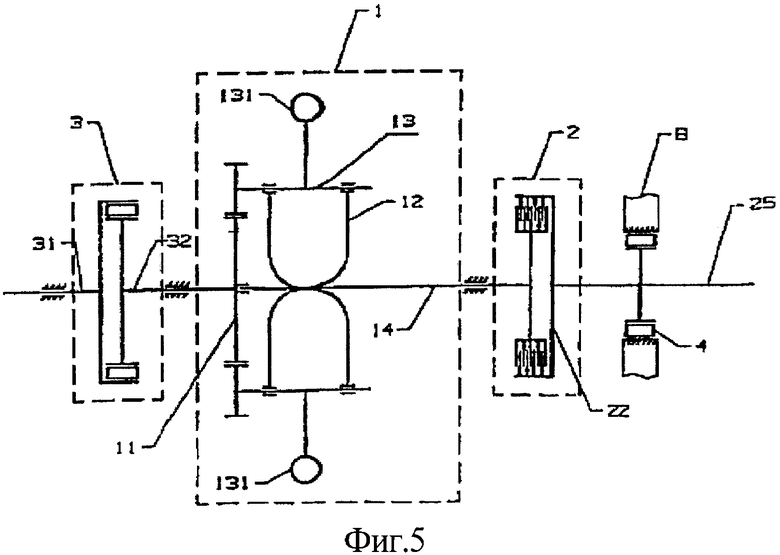
Фиг.5 - схематическая блок-диаграмма еще одного предпочтительного воплощения настоящего изобретения, показывающая базовую конфигурацию, в которой добавлено третье одностороннее сцепление на основании предпочтительного воплощения, показанного на фиг.3.
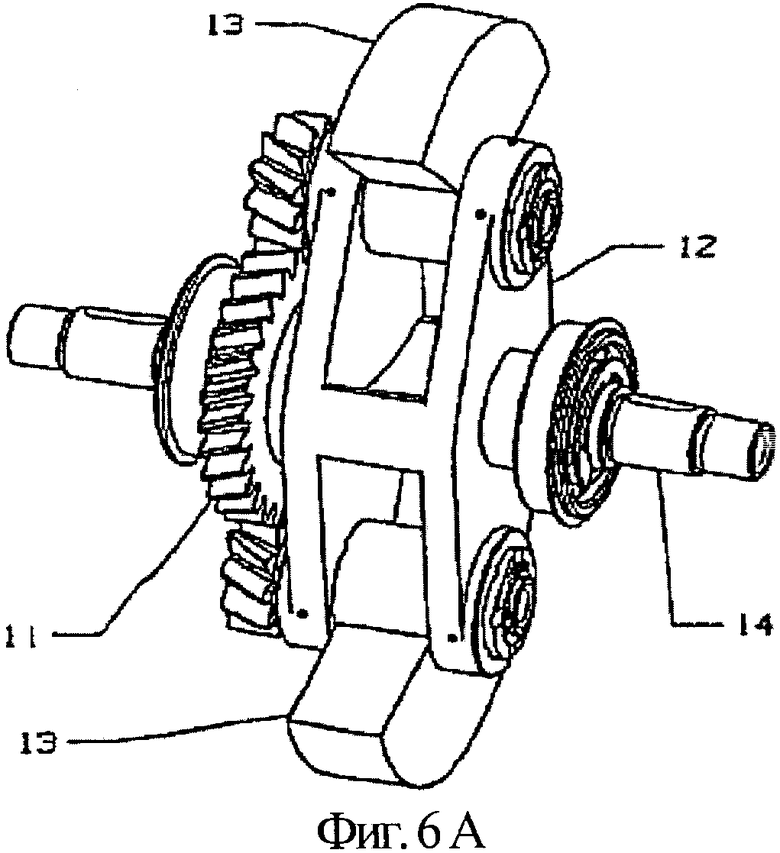
Фиг.6А - вид в перспективе механизма преобразования крутящего момента в воплощениях, показанных на фиг.2-5, в котором механизм преобразования крутящего момента содержит две эксцентриковые сборки.
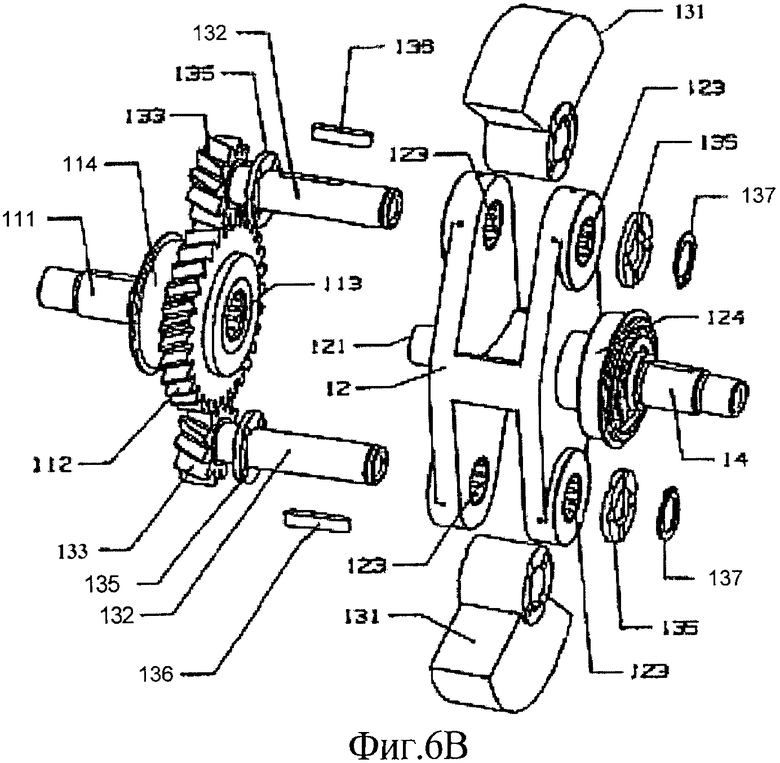
Фиг.6В - вид в перспективе в разобранном состоянии механизма преобразования крутящего момента по фиг.6А, показывающий специфические конфигурации и способы установки их компонент.
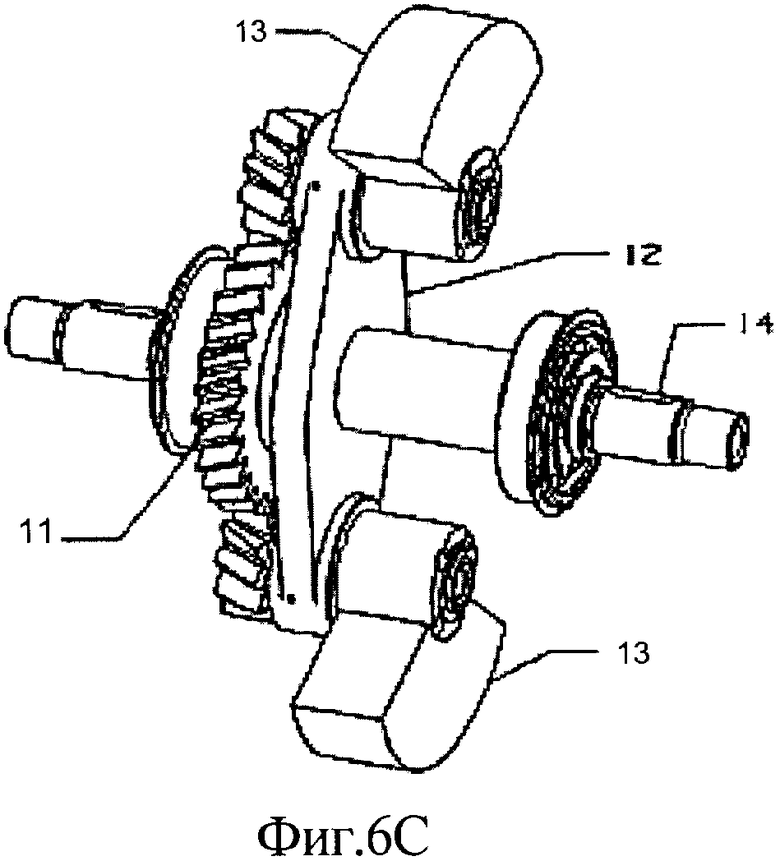
Фиг.6С - конфигурация механизма преобразования крутящего момента, который заменяет механизм преобразования крутящего момента, показанный на фиг.6А.
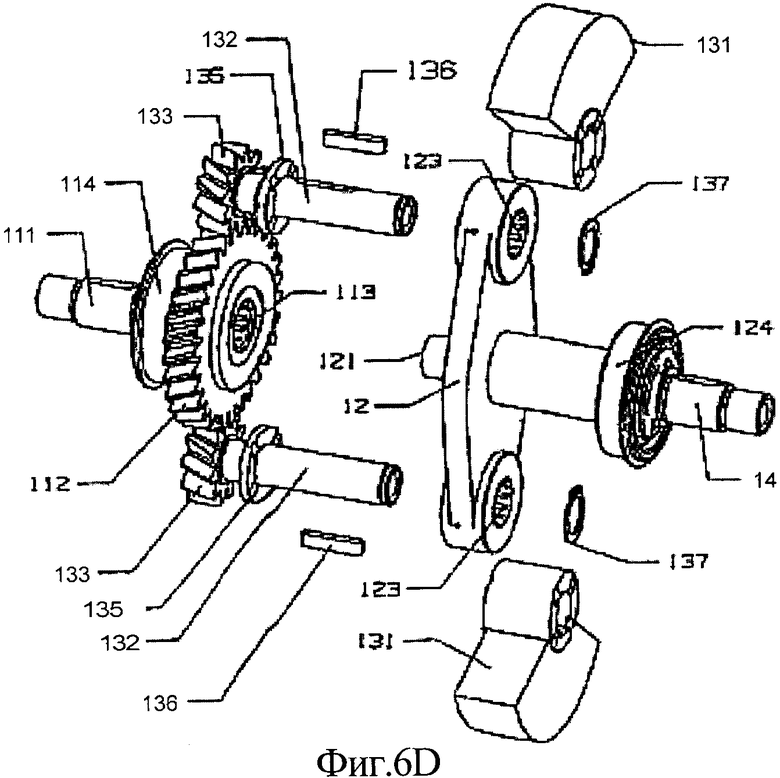
Фиг.6D - вид в перспективе в разобранном состоянии механизма преобразования крутящего момента по фиг.6С, показывающий специфические конфигурации и способы установки их компонент.
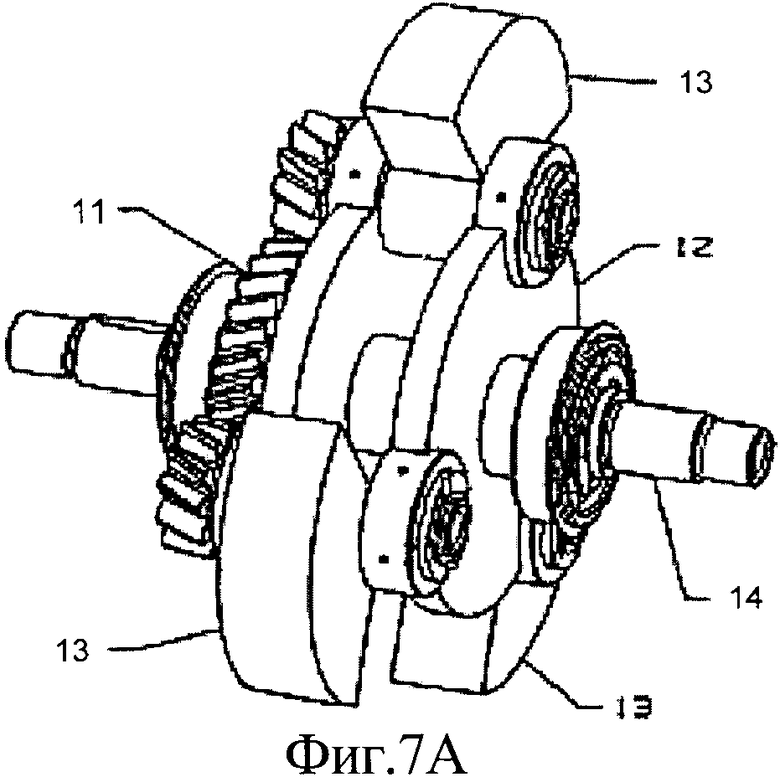
Фиг.7А - вид в перспективе другого механизма преобразования крутящего момента в воплощениях, показанных на фиг.2-5, в котором механизм преобразования крутящего момента содержит три эксцентриковые сборки.
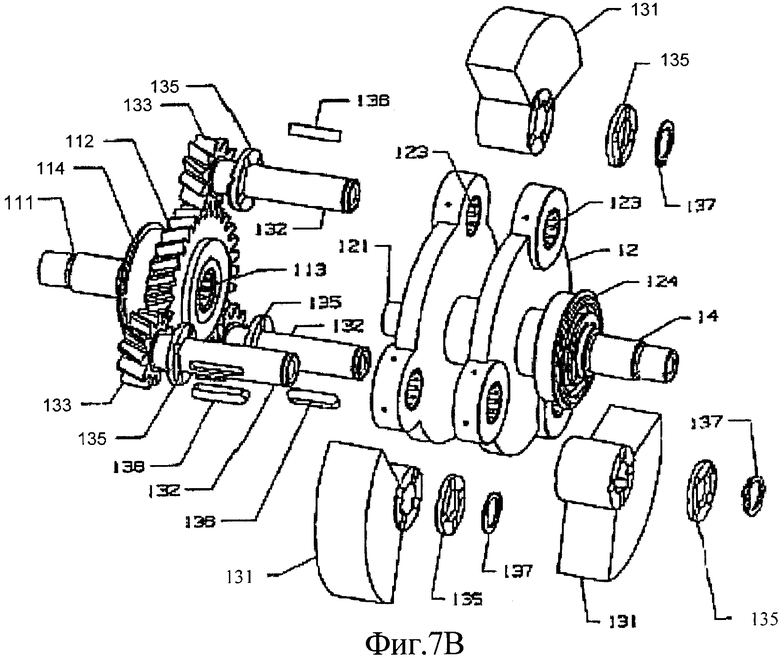
Фиг.7В - вид в перспективе в разобранном состоянии механизма преобразования крутящего момента по фиг.7А, показывающий специфические конфигурации и способы установки их компонент.
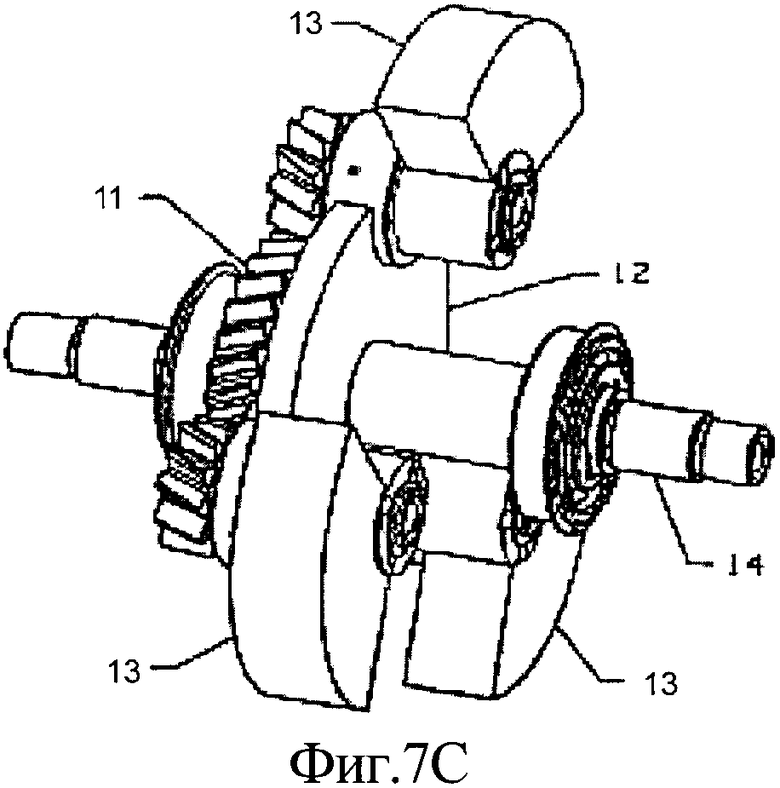
Фиг.7С - конфигурация механизма преобразования крутящего момента, который заменяет механизм преобразования крутящего момента, показанный на фиг.7А.
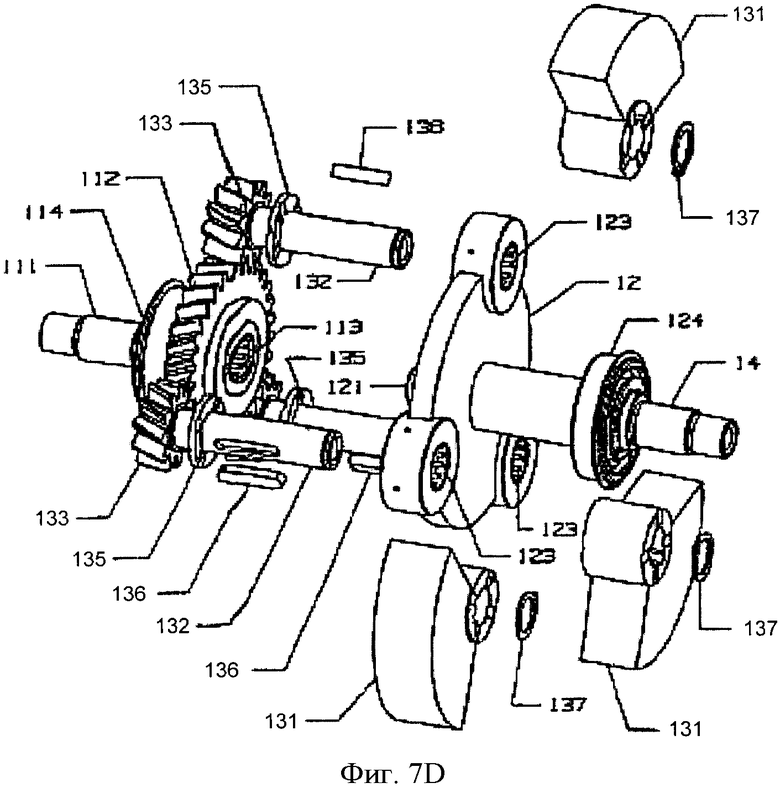
Фиг.7D - вид в перспективе в разобранном состоянии механизма преобразования крутящего момента по фиг.7С, показывающий специфические конфигурации и способы установки их компонент.
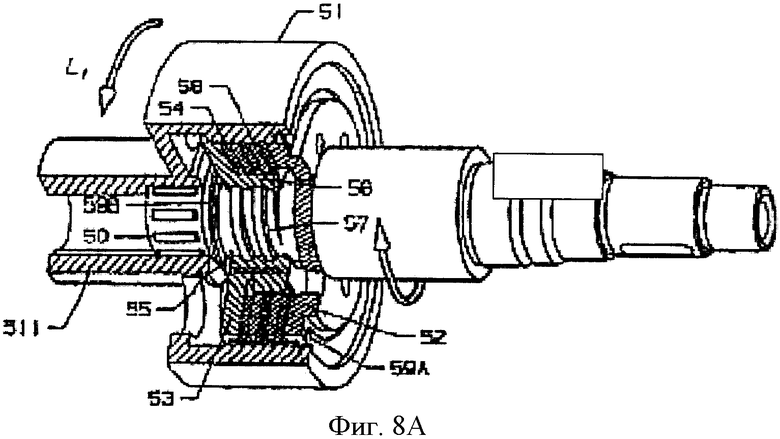
Фиг.8А - вид в перспективе конфигурации типа первого и второго односторонних сцеплений в воплощениях, показанных на фиг.2-5.
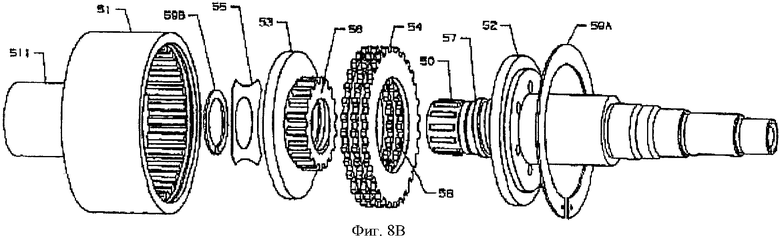
Фиг.8В - вид в перспективе в разобранном состоянии сцеплений, показанных на фиг.8А.
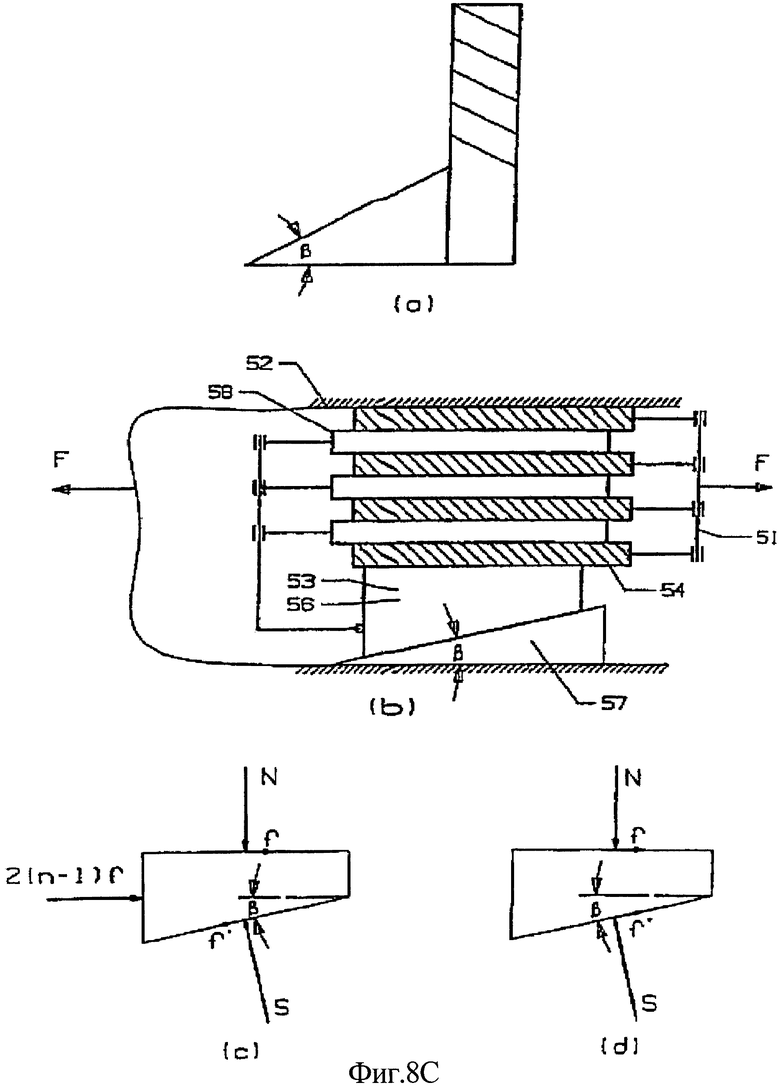
Фиг.8С содержит четыре блок-диаграммы, которые все вместе показывают принцип работы односторонних сцеплений по фиг.8А.
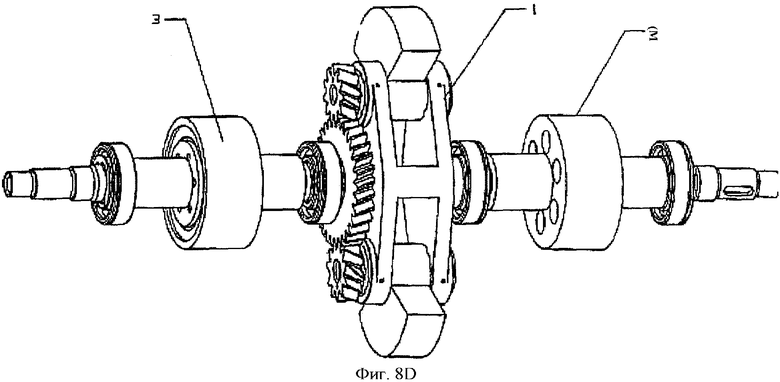
Фиг.8D - вид, показывающий полную механическую конфигурацию коробки передач настоящего изобретения в случае, когда как первое, так и второе односторонние сцепления принимают конфигурации, показанные на фиг.8А и 8В.
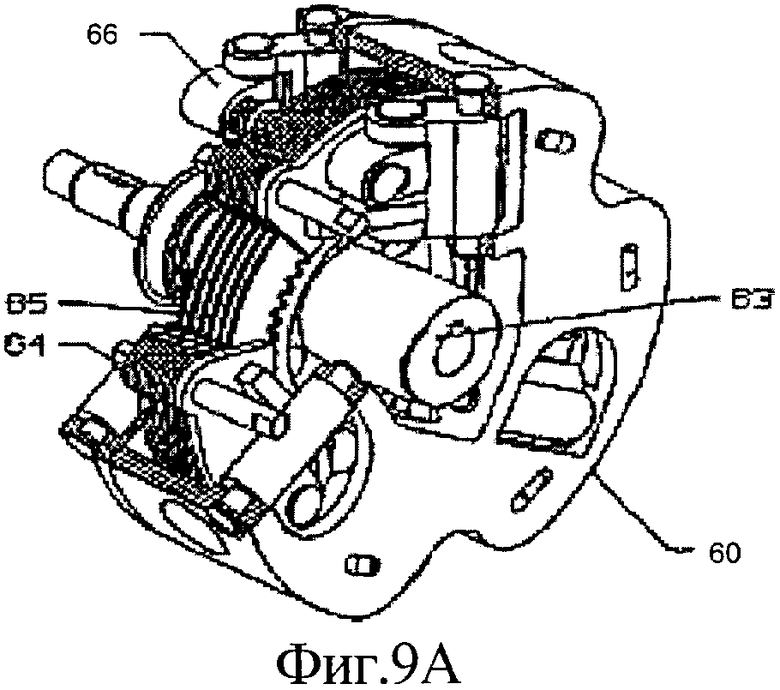
Фиг.9А - вид в перспективе другой конфигурации типа первого и второго односторонних сцеплений в воплощениях, показанных на фиг.2-5.
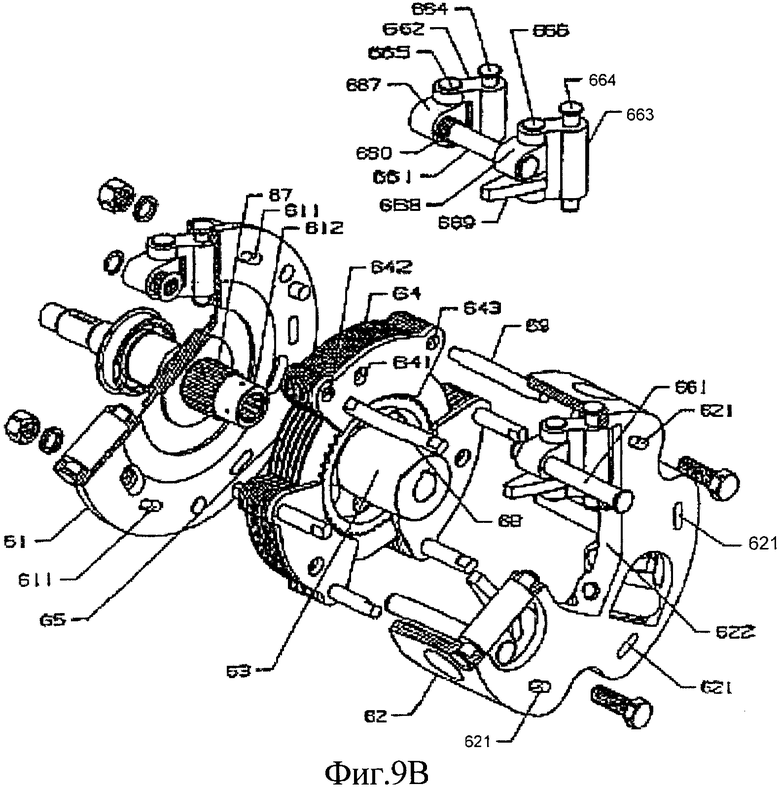
Фиг.9В - вид в перспективе в разобранном состоянии сцеплений, показанных на фиг.9А.
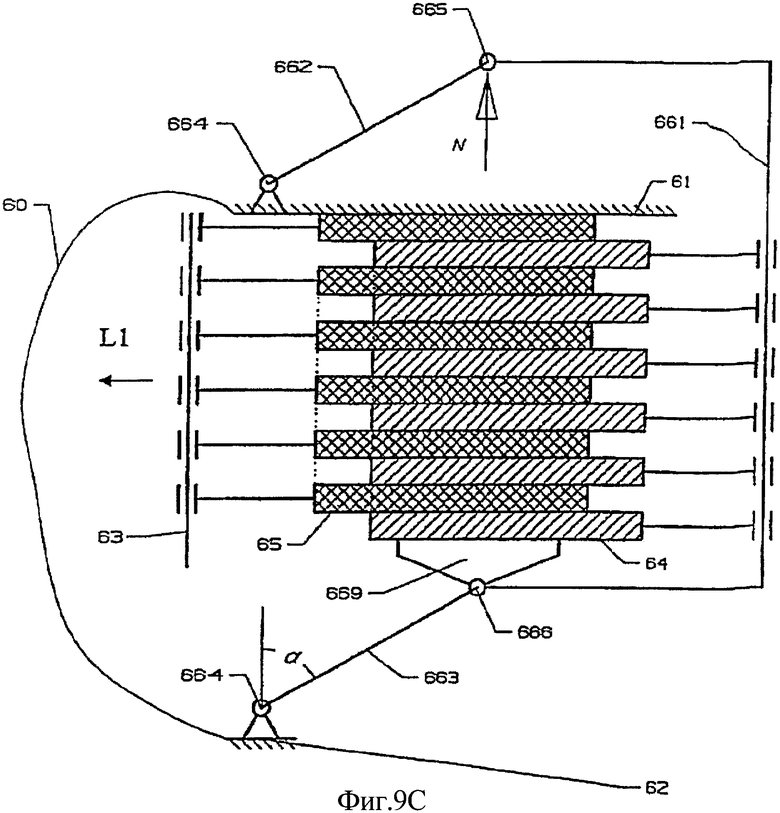
Фиг.9С - блок-диаграмма, показывающая принцип работы односторонних сцеплений по фиг.9А.
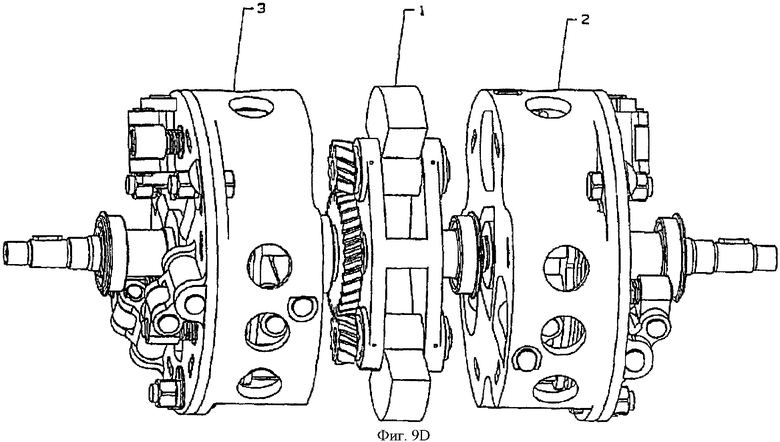
Фиг.9D - вид, показывающий полную механическую конфигурацию коробки передач настоящего изобретения в случае, когда как первое, так и второе односторонние сцепления принимают конфигурации, показанные на фиг.9А и 9В.
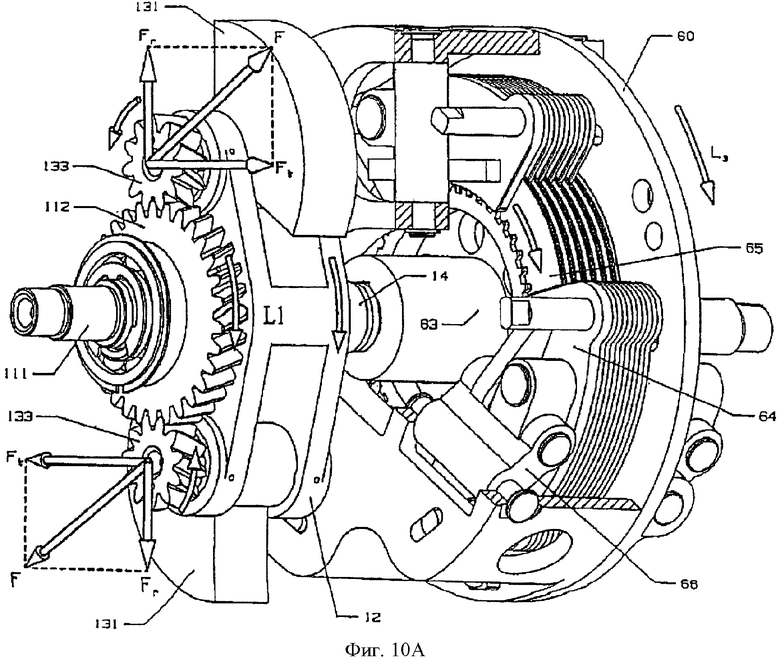
Фиг.10А - схематический вид, показывающий рабочее состояние бесступенчатой коробки передач согласно настоящему изобретению, в котором первое одностороннее сцепление находится в блокирующем состоянии.
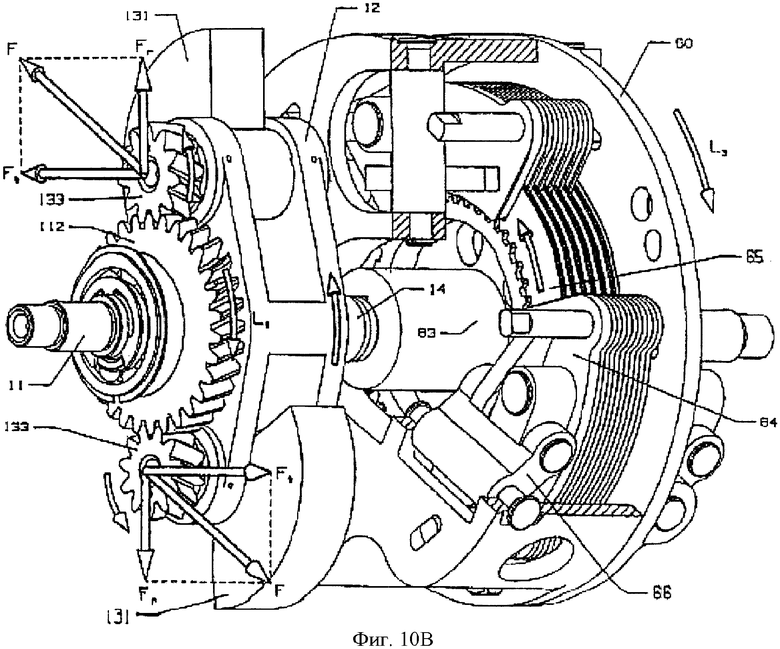
Фиг.10В - схематический вид, показывающий другое рабочее состояние бесступенчатой коробки передач согласно настоящему изобретению, в котором первое одностороннее сцепление находится в состоянии превышения установленной или нормальной скорости двигателя.
Подробное описание воплощений изобретения
На фиг.1А схематически показана конфигурация системы привода транспортного средства. Система привода содержит источник 100 энергии, коробку 200 передач и нагрузку 300 (то есть колеса и аналогичные устройства). Источник 100 энергии содержит двигатель, мотор или другие первичные движители. Настоящее изобретение поясняется по отношению к двигателю для удобства описания. Коробка 200 передач установлена между источником 100 энергии и нагрузкой 300, а выход энергии от источника 100 передается к колесам 300 транспортного средства посредством крутящего момента, а изменения скорости - посредством коробки 200 передач, так что вращаются колеса, тем самым заставляя транспортное средство двигаться вперед или назад. Настоящее изобретение усовершенствует коробку 200 передач в системе привода.
Как показано на фиг.1В, механически управляемая бесступенчатая автоматическая коробка 200 передач содержит корпус 8 и механизм 1 преобразования крутящего момента, установленный в корпусе 8. Механизм 1 преобразования крутящего момента содержит входную часть 11, поворотный или вращающийся носитель 12, по меньшей мере, одну эксцентриковую сборку 13 (на фиг.2 показаны две эксцентриковые сборки), которая поворотно установлена на носителе 12, и выходную часть 14, как показано на фиг.2. Как показано, входная часть 11 и носитель 12 могут вращаться независимо относительно друг друга и имеют соответствующие оси вращения, которые являются коллинеарными. Каждая из, по меньшей мере, одной эксцентриковой сборки 13 содержит эксцентриковую массу 131, которая приводится с возможностью вращения вокруг оси вращения посредством входной части 11, специфическая конфигурация которой будет подробно описана ниже.
Выходная часть 14 снабжена лишь одним односторонним сцеплением 2, непосредственно соединенным с ней. Энергия, подвергающаяся изменению крутящего момента и изменению скорости посредством механизма 1 преобразования крутящего момента, выдается на выходе через одностороннее сцепление 2. То есть скорость вращения может быть выдана на выходе в единственном направлении. Таким образом, механизм преобразования крутящего момента имеет простую конструкцию, удобен при сборке и требует низкие производственные расходы.
Одностороннее сцепление 2 является первым односторонним сцеплением. Первое одностороннее сцепление 2 представляет собой одностороннее сцепление осевого сжатия с поверхностным контактом, имеет элемент 23 зацепления ведущей части 21 и элемент зацепления 24 ведомой части 22, установленные соосно, как показано на фиг.2. Когда ведущая часть и ведомая часть зацепляются друг с другом, поверхности зацепления элементов 23 и 24 зацепления примыкают друг к другу, так чтобы передать момент посредством силы трения между ними. Первое одностороннее сцепление имеет не только высокий к.п.д. передачи и может удовлетворить требования рабочих условий высокой скорости и высокой частоты при пробеге транспортного средства, но и обладает характеристикой высокой износостойкости и длительным сроком службы в сравнении со сцеплением радиального сжатия и точечного контакта известного уровня техники. Выходной вал 25 одностороннего сцепления 2 связан с нагрузкой 300 непосредственно или через вспомогательное устройство 7, описанное ниже, чтобы передать момент к нагрузке 300.
На фиг.3 показано дополнительное усовершенствование вышеупомянутого предпочтительного воплощения, где коробка 200 передач содержит второе одностороннее сцепление 3, размещенное на переднем конце механизма 1 преобразования крутящего момента. Второе одностороннее сцепление 3 имеет входную часть 31, связанную с источником 100 энергии, и выходную часть 32, связанную со входной частью 31 механизма 1 преобразования крутящего момента. Блокирующее направление второго одностороннего сцепления 3 является тем же самым, что и направление вращения двигателя в прямом направлении и блокирующее направление первого одностороннего сцепления 2. Со вторым односторонним сцеплением 3 энергия двигателя передается к механизму 1 преобразования крутящего момента только в единственном направлении. Даже если скорость вращения выходной части 11 механизма 1 преобразования крутящего момента выше скорости вращения двигателя, так как второе одностороннее сцепление 3 находится в состоянии превышения установленной или нормальной скорости двигателя, когда он вращается в обратном направлении, момент в обратном направлении не может быть передан назад к двигателю, так что большая энергия, накопленная в эксцентриковой сборке 13, может быть передана к первому одностороннему сцеплению 2. Поэтому коробка передач настоящего изобретения может достичь большего соотношения преобразования крутящего момента, и не происходит циркуляции энергии к более низкому к.п.д. коробки передач.
На фиг.4 и 5 показано дополнительное усовершенствование вышеупомянутых двух предпочтительных воплощений, в котором коробка 200 передач дополнительно содержит третье одностороннее сцепление 4, расположенное на заднем конце первого одностороннего сцепления 2. Третье одностороннее сцепление 4 имеет блокирующее направление, противоположное блокирующему направлению первого одностороннего сцепления 2, и имеет подвижную часть, связанную с ведомой частью 22 первого одностороннего сцепления 2, и стационарную часть, зафиксированную в корпусе 8. Третье одностороннее сцепление 4 может содержать роликовое или эксцентриковое роликовое одностороннее сцепление известного уровня техники, которое выполнено с возможностью ограничивать обратное вращение выходной части 25 первого одностороннего сцепления 2. Поэтому третье одностороннее сцепление 4 не препятствует подвижному состоянию носителя 12. Например, когда транспортное средство находится в состоянии движения вперед или переключения скоростей во время остановки на дороге с подъемом, даже если не задействован стояночный тормоз, транспортное средство не может двигаться назад благодаря препятствующему движению воздействию третьего одностороннего сцепления, что очень удобно для водителя при вождении транспортного средства. Третье одностороннее сцепление имеет функцию, отличную от функции одностороннего сцепления, размещенного между втулкой качающего рычага и базовой рамой по патенту США №6.044.718, которое непосредственно ограничивает вращение качающегося рычага в возвратно-поступательном направлении.
В качестве примера предпочтительных воплощений, показанных на фиг.2-5, механизм 1 преобразования крутящего момента имеет конфигурацию, показанную на фиг.6А и 6В. Механизм 1 преобразования крутящего момента содержит носитель 12, а, по меньшей мере, одна эксцентриковая сборка содержит две эксцентриковые сборки 13, симметрично установленные на двух концах носителя 12. Каждая из двух эксцентриковых сборок 13 содержит ведомый вал 132, а эксцентриковая масса 131 и ведомое зубчатое колесо 133 установлены на ведомом валу 132. Эксцентриковая масса 131 и ведомое зубчатое колесо 133 шарнирно установлены на двух концах носителя 12 посредством ведомых валов 132. Как показано, носитель 12 имеет Н-образное продольное сечение, а ведомые валы 132 проходят через две боковые стенки носителя 12. Каждый из ведомых валов 132 имеет один конец, зафиксированный с ведомым зубчатым колесом 133, и другой конец, зафиксированный посредством пружинящего стопорного кольца 137. Распорки 135 расположены между пружинящими стопорными кольцами 137 и боковой стенкой носителя 12, а также соответственно между ведомыми зубчатыми колесами 133 и боковой стенкой носителя 12, так чтобы снизить износ носителя 12. Эксцентриковые массы 131 удерживаются между боковыми стенками носителя 12, так чтобы их можно было удобно разместить по оси и чтобы они были безопасными и надежными в работе.
Как показано на фиг.6А и 6В, входная часть 11 механизма 1 преобразования крутящего момента содержит ведущий вал 111 и ведущее зубчатое колесо 112, установленное на ведущем валу 111. Ведущий вал 111 связан с выходным валом двигателя (в воплощениях, показанных на фиг.2 и 4), или с выходной частью второго одностороннего сцепления 3 (в воплощениях, показанных на фиг.3 и 5). Ведущее зубчатое колесо 112 зацепляется с ведомыми зубчатыми колесами 133. Выходная часть 14 является выходным валом, зафиксированным в центре носителя 12, а ведущая часть 21 первого одностороннего сцепления 2 связана с выходным валом 14. Эксцентриковые массы 131 соединены соответственно с ведомыми валами 132 посредством шпонок 136. Поэтому когда ведущее зубчатое колесо 112 приводит во вращение ведомое зубчатое колесо 133, эксцентриковые массы 131 поворачиваются вокруг ведомого вала 132, как оси, по всей периферии окружности, и таким образом создают центробежные силы для привода во вращение носителя 12. Центробежные силы, созданные эксцентриковыми массами 131, приводят во вращение носитель 12.
Фиг.6С и 6D показывают альтернативное воплощение механизма преобразования крутящего момента, отличающееся от показанного на фиг.6А и 6В тем, что носитель имеет форму плоской платы. Носитель 12 имеет более простую конструкцию, а механизм 1 преобразования крутящего момента и вся коробка 200 передач, в целом, - более легкие, по сравнению с вышеупомянутым носителем 12.
Другим примером предпочтительных воплощений, показанных на фиг.2-5, является конфигурация механизма 1 преобразования крутящего момента, как показано на фиг.7А и 7В. Механизм 1 преобразования крутящего момента содержит носитель 12, а, по меньшей мере, одна эксцентриковая сборка содержит три эксцентриковых сборки 13, установленные на носителе 12 с одинаковыми интервалами в круговом направлении его. Каждая их трех эксцентриковых сборок 13 содержит ведомый вал 132, а эксцентриковая масса 131 и ведомое зубчатое колесо 133 установлены на ведомом валу 132. Как показано, носитель 12 представляет собой дискообразное тело, а эксцентриковые массы 131 и ведомые зубчатые колеса 133 шарнирно установлены на кромке носителя 12 посредством ведомого вала 132. Этот механизм преобразования крутящего момента может создавать большее соотношение преобразования крутящего момента, так чтобы быть более удобным для тяжелых транспортных средств с большой нагрузкой, по сравнению с механизмом преобразования крутящего момента, показанным на фиг.6А и 6D. Поскольку три эксцентриковые сборки распределены с одинаковыми интервалами в круговом направлении, можно быть уверенным в том, что радиальные силы, воздействующие на носитель 12 в радиальном направлении по отношению к оси вращения его, всегда будут уравновешены, а окружные силы, воздействующие на носитель 12, будут иметь то же самое окружное или поворотное направление, для образования момента связи, чтобы привести во вращение ось поворота носителя 12.
Входная часть 11 и выходная часть 12 механизма 1 преобразования крутящего момента имеют ту же самую конфигурацию, что и конфигурация других воплощений. Входная часть 11 содержит ведущий вал 111 и ведущее зубчатое колесо 112, установленное на ведущем валу 111. Ведущий вал 111 связан с выходным валом двигателя (в воплощениях, показанных на фиг.2 и 4), или со вторым односторонним сцеплением 3 (в воплощениях, показанных на фиг.3 и 5). Это воплощение отличается от вышеупомянутых воплощений тем, что ведущее зубчатое колесо 112 находится в зацеплении с тремя ведомыми зубчатыми колесами 133. Выходной частью 14 является выходной вал, зафиксированный в центре носителя 12, а ведущая часть 21 первого одностороннего сцепления 2 связана с выходным валом 14. Аналогично вышеупомянутому воплощению фиг.7С и 7D показывают альтернативное воплощение механизма преобразования крутящего момента, который отличается от показанного на фиг.7А и 7В тем, что носитель 12 имеет форму плоской платы. Таким образом, носитель 12 имеет более простую конструкцию, а механизм преобразования крутящего момента и коробка 200 передач, в целом, являются более легкими.
На фиг.8А и 8В приведен пример предпочтительных воплощений, показанных на фиг.2-5, в котором первое одностороннее сцепление 2 представляет собой одностороннее сцепление винтового пресса, которое зацепляется посредством винтового прижатия. Одноходовое сцепление винтового пресса содержит барабан 51 сцепления, а также первый и второй фрикционные диски 52 и 53, размещенные в барабане 51 сцепления и параллельные друг другу, по меньшей мере, одну фрикционную плату 54 барабана и, по меньшей мере, одну пружину 55. Пружина 55 может приложить усилие предварительного сжатия к первому и второму фрикционным дискам 52 и 53. Первый и второй фрикционные диски 52 и 53 прижимают, по меньшей мере, одну фрикционную плату 54 барабана под воздействием пружины 55, а, по меньшей мере, одна фрикционная плата 54 барабана посажена на втулке 56 и связана с барабаном 51 сцепления таким образом, что может быть передан крутящий момент. Втулка 56 имеет внутреннюю резьбу, а передающий крутящий момент вал 57 выступает во втулку 56 и имеет конец, выступающий во втулку, который образован с наружной резьбой, зацепляющейся с внутренней резьбой.
Как показано на фиг.8А и 8В, в предпочтительном воплощении настоящего изобретения, по меньшей мере, одна фрикционная плата барабана содержит множество фрикционных плат 54 барабана, а дисковая фрикционная плата 58 размещена между каждыми двумя смежными фрикционными платами 54 барабана. Дисковая фрикционная плата посажена на втулке 56 и связана со втулкой таким образом, чтобы мог быть передан крутящий момент. Когда момент передается от левой стороны к правой стороне (что описано со ссылкой на фиг.8А и 8В), барабан 51 сцепления и фрикционные платы 54 барабана образуют ведущую часть 21 первого одностороннего сцепления 2, дисковая фрикционная плата 58, втулка 56, первый и второй фрикционные диски 52 и 53, передающий крутящий момент вал 57 образуют ведомую часть 22 первого одностороннего сцепления 2, а фрикционные платы 54 барабана и дисковая фрикционная плата 58 соответствуют элементам 23 и 24 зацепления соответственно ведущей части и ведомой части, когда используется фрикционная плата 54 барабана, первый и второй фрикционные диски 52 и 53 соответствуют элементу 24 зацепления ведомой части 22, то есть дисковым фрикционным платам. Поэтому нет необходимости устанавливать дисковую фрикционную плату 58.
Как показано на фиг.8А и 8В, барабан 51 сцепления, первый и второй фрикционные диски 52 и 53, фрикционные платы 54 барабана, втулка 56 и дисковая фрикционная плата 58 имеют соответствующие оси вращения, которые являются коллинеарными. Фрикционные платы барабана посажены на шлицах на барабане 51 сцепления, а дисковая фрикционная плата 58 также посажена на шлицах на втулке 56. Благодаря шлицевой связи не только обеспечивается эффективная передача входного крутящего момента, но и то, что механизм преобразования крутящего момента будет простым в изготовлении, а его производственные расходы будут низкими. Барабан 51 сцепления имеет один открытый конец (правый конец по фиг.8А и 8В) и другой конец, образованный простирающимся наружу пустотелым валом 511 в центральной части его. Конец, который выступает во втулку, передающего момент вала 57, установлен в пустотелом валу 511 через подшипник 50. Поэтому удобно установить и разместить передающий момент вал 57, и этим может быть обеспечена коллинеарность осей передающего момент вала 57 и барабана 51 сцепления. В предпочтительном воплощении настоящего изобретения подшипник 50 содержит игольчатый роликовый подшипник, который облегчает точное размещение передающего крутящий момент вала.
Как показано на фиг.8А и 8В, первый фрикционный диск 52 зафиксирован на передающем крутящий момент валу 57 и установлен в открытом конце барабана 51 сцепления посредством первого пружинящего стопорного кольца 59А. Второй фрикционный диск 53 выполнен за одно целое со втулкой 56 и установлен на передающем крутящий момент валу 57 посредством второго пружинящего стопорного кольца 59В. Как показано на фиг.8А и 8В, в предпочтительном воплощении настоящего изобретения лишь одна пружина 55 предусмотрена в барабане 51 сцепления. Пружина 55 представляет собой платообразную нажимную пружину, посаженную на передающем валу 57 и расположенную между вторым пружинящим стопорным кольцом 59В и вторым фрикционным диском 53. Благодаря такой платообразной нажимной пружине не только может быть приложено усилие предварительного сжатия, но и обеспечен малый осевой размер сцепления, так что может быть снижено пространство, занимаемое пружиной 55 в барабане одностороннего сцепления, и, в свою очередь, снижен объем, в целом, одностороннего сцепления.
Что касается первого одностороннего сцепления 2, при его использовании пустотелый вал 511 барабана 51 сцепления связывается с выходным валом 14 механизма 1 преобразования крутящего момента через шпонку, и передающий момент вал 57 также связывается с наружной частью посредством шпонки. Касательно фиг.8А и 8В будет пояснен принцип работы и рабочий процесс одностороннего сцепления винтового пресса, как описано ниже. Когда выходной вал 14 вращается в направлении L1 (блокирующее направление одностороннего сцепления), в случае, когда направление противодействия нагрузки является противоположным направлению L1, выход 14 приводит во вращение барабан 51 сцепления и фрикционные платы 54 барабана в направлении L1. Благодаря воздействию усилия предварительного сжатия нажимной пружины 55 имеет место сила трения между фрикционными платами 54 барабана и дисковой фрикционной платой 58. Фрикционные платы 54 барабана приводят во вращение дисковую фрикционную плату 58 аналогично в направлении L1 посредством силы трения. Дисковая фрикционная плата 58 приводит во вращение втулку 56 в направлении L1 через шлицевое соединение. Так как передающий момент вал 57 и втулка 56 связаны друг с другом посредством правой резьбы, втулка 56 и второй фрикционный диск 53 перемещают только передающий вал 57 к правой стороне, так чтобы дополнительно прижать фрикционные платы 54 барабана и дисковую фрикционную плату 58. В это время одностороннее сцепление находится в блокирующем состоянии, так что передающий момент вал 57 также вращается в направлении L1. Иначе, одностороннее сцепление находится в состоянии превышения установленной или нормальной скорости двигателя. Эквивалентный коэффициент трения можно эффективно увеличить установкой множества фрикционных плат 54 барабана и множества дисковых фрикционных плат 58. В случае, когда не изменяется число фрикционных плат 54 барабана и дисковых фрикционных плат 58, может быть достигнута автоматическая блокировка между ведущей частью 21 и ведомой частью 22 специальным проектированием значения угла β спирали, то есть обеспечением того, что входной момент находится в направлении L1. Иначе, когда входной момент находится в направлении, противоположном направлению L1, сцепление находится в состоянии превышения установленной или нормальной скорости двигателя, так что оно не может передать момент. Когда передающий момент вал 57 и втулка 56 связаны друг с другом посредством левой резьбы, блокирующее направление противоположно вышеупомянутому направлению.
Фиг.8С является схематической блок-диаграммой, показывающей принцип работы односторонних сцеплений винтового пресса по фиг.8А. Базовый принцип спирального прижатия идентичен базовому принципу прижатия наклонной плоскости. Резьба соответствует образованию гипотенузы посредством поворота правильного треугольника вокруг цилиндра в случае, когда сторона прямого угла правильного треугольника перпендикулярна оси цилиндра, а угол наклона β гипотенузы соответствует углу спирали резьбы. Принцип работы односторонних сцеплений винтового пресса показан на фиг.8С (b). Посадка между клином и наклонной плоскостью соответствует посадке между внутренней резьбой втулки 56 и наружной резьбой передающего момент вала 57, клин соответствует сочетанию второго фрикционного диска 53 и втулки 56, а наклонная плоскость и участок, заодно выполненный с ней, соответствует сочетанию передающего момент вала 57 и первого фрикционного диска 52.
На фиг.8D показано предпочтительное воплощение настоящего изобретения, где второе одностороннее сцепление 3, размещенное на переднем конце механизма 1 преобразования крутящего момента, является также односторонним сцеплением винтового пресса по фиг.8А и 8В. Поэтому второе одностороннее сцепление 3 может также передавать большой крутящий момент и большую движущую энергию и иметь большой срок службы. Коробка передач с вышеупомянутой конфигурацией может быть приложена не только на малых автомобилях, но также и на тяжелых транспортных средствах.
На фиг.9А и 9В приведен другой пример предпочтительных воплощений, показанных на фиг.2-5, где первое одностороннее сцепление 2 является односторонним сцеплением посредством сжатия 4-стержневого механизма связи, который зацепляется посредством сжатия 4-стержневого механизма связи. Одностороннее сцепление посредством сжатия 4-стержневого механизма связи содержит корпус 60, образованный из фрикционного диска 61 и крышки 62 сцепления, объединенных вместе. Как показано на фиг.9А и 9В, в предпочтительном воплощении настоящего изобретения фрикционный диск 61 и крышка 62 сцепления подсоединены друг к другу посредством болтов. Раструб 63 сцепления, множество фрикционных плат 65 раструба, по меньшей мере, один набор дисковых фрикционных плат 64 и, по меньшей мере, один 4-стержневой механизм 66 связи посредством сжатия размещены в корпусе 60. Как показано на фиг.9А и 9В, раструб 63 сцепления размещен в центре корпуса 60, сквозное отверстие 622 образовано в центральном участке крышки 62 сцепления, и конец (правый конец на фиг.9А и 9В) раструба 63 сцепления остается открытым со стороны сквозного отверстия 622, так чтобы быть связанным с наружным входным валом или выходным валом. Фрикционные платы 65 раструба имеют форму круглого кольца и посажены на раструбе 63 сцепления, и связаны между собой так, что может быть передан крутящий момент. В предпочтительном воплощении, показанном на фиг.9А и 9В, раструб 63 сцепления и фрикционные платы 65 раструба связаны между собой шлицевым соединением. Передающий момент вал 612 установлен в центре фрикционного диска 61 и имеет конец, выступающий наружу и связанный с наружным входным или выходным валом, и другой конец, установленный в центральном отверстии раструба 63 сцепления через подшипник 67. Подшипник 67 является игольчатым роликовым подшипником. Поэтому передающий момент вал не только точно размещен, но он может вращаться в течение длительного времени.
Число наборов, по меньшей мере, одного набора дисковых фрикционных плат 64 и число, по меньшей мере, одного 4-стержневого механизма 66 связи посредством сжатия является одинаковым. Как показано на фиг.9А и 9В, в предпочтительном воплощении настоящего изобретения, по меньшей мере, один 4-стержневой механизм 66 связи посредством сжатия содержит три 4-стержневых механизма 66 связи посредством сжатия, расположенные на корпусе 60, по меньшей мере, один набор дисковых фрикционных плат содержит три набора дисковых фрикционных плат 64, соответственно расположенных в корпусе 60, причем три 4-стержневых механизма 66 связи посредством сжатия и три набора дисковых фрикционных плат 64 расположены с одинаковыми интервалами в круговом направлении.
Как показано на фиг.9А и 9В, каждый набор, по меньшей мере, одного набора дисковых фрикционных плат содержит множество фрикционных плат, имеющих форму части круглого кольца, которые установлены так, чтобы чередоваться с фрикционными платами 65 раструба. Каждый из, по меньшей мере, одного 4-стержневого механизма 66 связи посредством сжатия имеет поперечный стержень 661, каждый набор, по меньшей мере, одного набора дисковых фрикционных плат 64 имеет сквозное отверстие 641 в том же самом положении соответствующих дисковых фрикционных плат, и поперечные стержни 661 проходят через сквозные отверстия 641.
4-стержневые механизмы 66 связи посредством сжатия прижимают дисковые фрикционные платы 64 и фрикционные платы 65 раструба к поверхности трения фрикционного диска 61. Как специально показано на фиг.9В, каждый из, по меньшей мере, одного 4-стержневого механизма связи посредством сжатия содержит два поддерживающих рычага 662 и 663, параллельные друг другу, и поперечный стержень 661, соединяющий два поддерживающих рычага 662 и 663. Поддерживающие рычаги 662 и 663 имеют ту же самую длину. Два поддерживающих рычага 662 и 663 имеют концы, шарнирно установленные посредством соединительных штифтов 664 на корпусе 60, в частности на фрикционном диске 61 и соответственно на крышке 62 сцепления, как показано на фиг.9В, и другие концы, шарнирно установленные на соединительных брусках 667 и 668 посредством соответственно соединительных штифтов 665 и 666, а поперечный стержень 661 имеет два конца, которые зафиксированы соответственно на соединительных брусках 667 и 668. Корпус 60, два поддерживающих рычага 662 и 663 и поперечный стержень 661 образуют 4-стержневой механизм связи, противоположные звенья связи которого параллельны друг другу. Пружина 660 посажена на конце поперечного стержня 661, а прижимной брусок 669 расположен на другом конце поперечного стержня 661, и прижимной брусок 669 шарнирно установлен на соединительном штифте 666.
Как показано на фиг.9В, пружина является нажимной пружиной. Нажимная пружина 660 и прижимной брусок 669 воздействуют соответственно на две стороны каждого набора, по меньшей мере, одного набора дисковых фрикционных плат 64. Нажимная пружина 660 создает усилие предварительного сжатия для прижатия дисковых фрикционных плат 64 и фрикционных плат 65 раструба, так что дисковые фрикционные платы 64 и фрикционные платы 65 раструба примыкают друг к другу.
Как показано на фиг.9А и 9В, каждый набор, по меньшей мере, одного набора дисковых фрикционных плат 64 дополнительно имеет два сквозных отверстия 642 и 643, через которые соответственно проходят два цилиндрических штифта 68 и 69, так что соответствующие дисковые фрикционные платы соединены последовательно. Фрикционный диск 61 и крышка 62 сцепления соответственно образованы с двумя продольными канавками 611 и 621, простирающимися соответственно в круговом направлении. Два конца каждого из двух цилиндрических штифтов 68 и 69 введены в продольные канавки 611 и 621, каждый из концов двух цилиндрических штифтов снабжен двумя плоскостями, параллельными друг другу, и две плоскости каждого из концов сопрягаются с соответствующими двумя плоскостями каждой из продольных канавок. Поэтому каждый набор, по меньшей мере, одного набора дисковых фрикционных плат 64 установлен на крышке 61 сцепления и фрикционном диске 62 посредством цилиндрических штифтов 68 и 69, испытывающих центробежные нагрузки, образованные соответствующими дисковыми фрикционными платами 64 при их вращении.
Со ссылкой на фиг.9С будет описан ниже рабочий процесс и принцип работы 4-стержневых механизмов связи посредством сжатия, показанных на фиг.9А и 9В. Когда подается момент на вход от раструба 63 сцепления, раструб 63 сцепления и фрикционные платы 65 раструба образуют ведущую часть 21, а дисковые фрикционные платы 64, корпус 60 и передающий момент вал 612 образуют ведомую часть 22. Когда входной момент заставляет вращаться раструб 63 сцепления в направлении L1, раструб 63 сцепления приводит во вращение фрикционные платы 65 раструба в направлении L1 через шлицевое соединение. Фрикционные платы 65 раструба приводят во вращение дисковые фрикционные платы 64 аналогично в направлении L1 благодаря силе трения между ними. Фрикционные платы 65 раструба приводят корпус 60 во вращение в направлении L1 через 4-стержневые механизмы 66 связи посредством сжатия. В это время поддерживающие рычаги 663 и прижимающие бруски 669 дополнительно прижимают фрикционные платы 65 раструба и дисковые фрикционные платы 64, так чтобы достигнуть состояния автоматической блокировки. Иначе, когда входной момент заставляет вращаться раструб 63 сцепления в направлении, противоположном направлению L1, 4-стержневые механизмы 66 связи посредством сжатия автоматически устанавливаются в состояние отпирания, снижается сила прижатия, приложенная к дисковым фрикционным платам 64 и фрикционным платам 65 раструба посредством прижимающих брусков 669, так что ведущая часть 21 и ведомая часть 22 могут вращаться друг относительно друга. В результате, сцепление переходит в состояние превышения установленной или нормальной скорости двигателя.
На фиг.9D показано предпочтительное воплощение настоящего изобретения, где второе одностороннее сцепление 3 также представляет собой одностороннее сцепление посредством сжатия 4-стержневого механизма связи, которое имеет высокую характеристику чувствительности и износостойкости, и может передавать момент большой энергии, так что оно может быть использовано в различных тяжелых транспортных средствах.
Принцип работы и рабочий процесс коробки передач настоящего изобретения будет описан ниже. На фиг.10А и 10В представлен вид в перспективе с вырывом сочетания механизма преобразования крутящего момента, имеющего две эксцентриковые сборки, и одностороннего сцепления посредством сжатия 4-стержневого механизма связи.
Как показано на фиг.10А и 10В, когда двигатель приводит во вращение ведущий вал 111 в направлении по часовой стрелке (если смотреть с левой стороны, нижеприведенное имеет место, как описано), до тех пор, пока имеется разница в скорости между входной частью и носителем 12, ведущее зубчатое колесо 112 приводит во вращение два ведомых зубчатых колеса 133 в направлениях, показанных соответственно на фиг.10А и 10В. Поэтому эксцентриковые массы 131 вращаются вокруг ведомых валов 132 по полной окружности. Когда вращаются эксцентриковые массы 131, образуются центробежные силы F. Каждая из сил F направлена в направлении от центра соответствующего ведомого вала 132 к центру массы соответствующей эксцентриковой массы 131, как показано на фиг.10А и 10В. Силы F воздействуют на носитель 12 через ведомые валы 132. Каждая из сил F разлагается в окружном направлении и радиальном направлении вращения носителя 12, на радиальную силу Fr и тангенциальную силу Ft. Поскольку две эксцентриковые сборки 13 являются симметричными относительно центра носителя 12 при любом моменте, две радиальные силы Fr равны по величине друг другу, направлены соответственно в противоположных направлениях и расположены на той же самой линии, так чтобы уравновесить друг друга. Две тангенциальные силы Ft соответственно одинаковы по величине, но противоположны по направлению, и параллельны друг другу с расстоянием между ними (расстоянием между осями двух ведомых валов), так чтобы образовать момент М пары. Момент М пары приводит во вращение носитель 12.
Центробежные силы F, образованные эксцентриковыми массами 131 при их вращении, имеют соответствующие направления и соответствующие величины, которые периодически изменяются в зависимости от положения вращения эксцентриковых масс 131 относительно носителя 12. Поэтому момент М пары имеет направление и величину, которые периодически изменяются. Когда эксцентриковые массы 131 повернутся в положения, показанные на фиг.10А, момент М пары действует в направлении по часовой стрелке, а носитель 12 и выходной вал 14 вращаются в направлении по часовой стрелке. По мере дальнейшего поворота эксцентриковых масс 131 момент М пары изменяет направление. Когда эксцентриковые массы 131 повернутся в положения, показанные на фиг.10В, центробежные силы F, образованные эксцентриковыми массами 131, направлены в направлениях, показанных соответственно на фиг.10В. Тангенциальные силы Ft, разложенные из сил F, действуют в направлениях, противоположных направлениям, показанным соответственно на фиг.10А. Поэтому момент М пары образуется в направлении против часовой стрелки. Момент М пары заставляет носитель 12 вращаться в направлении против часовой стрелки или уменьшает скорость вращения носителя 12 в направлении по часовой стрелке. Поэтому каждый момент всего периода вращения эксцентриковых масс 131 теоретически считается моментом М, приложенным к носителю 12, который изменяется по величине в каждый момент времени и чередуется по направлению. Носитель 12 поворачивается в различные состояния движения в зависимости от скорости вращения одностороннего сцепления 2. В случае, когда нормально вращается входная часть 11, носитель 12 принимает состояние прерывистого колебания, когда скорость вращения выходной части одностороннего сцепления 2 равна нулю, носитель 12 принимает состояние возвратно-поступательного качания, когда выходная часть одностороннего сцепления 2 имеет определенную скорость вращения, но носитель 12 и компоненты, вращающиеся с ним, имеют момент количества движения, меньший значения изменения момента количества движения эксцентриковых масс 131, и носитель 12 поворачивается непрерывно в блокирующем направлении одностороннего сцепления, когда выходная часть одностороннего сцепления 2 имеет большую скорость вращения, а носитель 12 и компоненты, вращающиеся с ним, имеют момент количества движения больше значения изменения момента количества движения эксцентриковых масс 131. Вращение эксцентриковых масс 131 заставляет периодически быстро и медленно вращаться носитель 12.
Может быть обнаружено из вышеупомянутого анализа, что колеблются скорость и момент, выданные на выходе из выходного вала 14, которые подверглись изменениям посредством механизма 1 преобразования крутящего момента. Рабочий процесс описан в сочетании с одностороннем сцеплением, установленным на заднем конце механизма 1 преобразования крутящего момента, следующим образом. Как показано на фиг.10А, когда момент М пары действует в направлении по часовой стрелке, носитель 12 и выходной вал 14 вращаются в направлении по часовой стрелке, выходной вал 14 приводит раструб 63 сцепления и фрикционные платы 65 раструба первого одностороннего сцепления 2, размещенного на заднем конце, во вращение в направлении по часовой стрелке, а первое одностороннее сцепление 2 автоматически устанавливается в состояние автоматической блокировки. Поэтому фрикционные платы 65 раструба приводят дисковые фрикционные платы 64, корпус 60 и передающий момент вал 612 во вращение в направлении по часовой стрелке, и выдается на выходе момент в направлении L1, показанном на фиг.10А. Как показано на фиг.10В, когда момент М пары действует в направлении против часовой стрелки, носитель 12 вращается в направлении против часовой стрелки, или замедляется скорость вращения носителя 12 в направлении по часовой стрелке, а первое одностороннее сцепление 2 автоматически устанавливается в состояние превышения установленной или нормальной скорости двигателя, так что крутящий момент не передается, но имеет место большая разница в скорости вращения между ведущим зубчатым колесом 112 и носителем 12. Поэтому ведущее зубчатое колесо 112 приводит во вращение эксцентриковые сборки 13 с более высокой скоростью вращения ω, а эксцентриковые сборки 13 накапливают больше кинетической энергии (согласно выражению Е=0,5Jω2, где J представляет момент инерции эксцентриковой сборки 13 относительно ее оси). Когда направление момента М пары изменяется на направление по часовой стрелке с направления против часовой стрелки, момент М пары в направлении по часовой стрелке становится больше. То есть, когда момент М пары действует в направлении против часовой стрелки, эксцентриковые массы 131 накапливают энергию, и когда момент М пары действует в направлении по часовой стрелке, эксцентриковые массы 131 выдают на выходе энергию через носитель 12. Поэтому выходной вал 612 одностороннего сцепления может непрерывно выдавать на выходе момент в направлении по часовой стрелке (направлении L3, показанном на фиг.10А и 10В).
Как описано выше, носитель 12 имеет более низкую скорость вращения, чем скорость вращения ведущего зубчатого колеса 112, так что при работе имеет место разница в скорости вращения между ведущим зубчатым колесом и носителем 12. При разнице в скорости вращения скорость и момент, выданные на выходе из выходного вала 14 и передающего момент вала 612 одностороннего сцепления, можно автоматически регулировать согласно изменению величины нагрузки из выходной части. Специфические процессы и принцип регулировки описаны следующим образом. Когда транспортное средство поднимается по наклонной дороге, увеличивается сопротивление выходному валу 25 первого одностороннего сцепления, а скорость вращения выходного вала 25 первого одностороннего сцепления замедляется. Когда первое одностороннее сцепление 2 находится в блокирующем состоянии, также увеличивается сопротивление выходному валу 14 механизма 1 преобразования крутящего момента и автоматически снижается скорость вращения носителя 12, так что увеличивается разница в скорости вращения между ведущим зубчатым колесом 112 и носителем 12. Как описано выше, в это время эксцентриковые массы 131 вращаются с более высокой скоростью и накапливают больше кинетической энергии, так что больший момент М пары может быть выдан на выходе в следующий период. Когда нагрузка падает, изменение переменных параметров происходит как раз противоположно вышеописанному рабочему состоянию, автоматически увеличивается выходная скорость механизма преобразования крутящего момента, снижается соответственно выходной крутящий момент механизма преобразования крутящего момента. Характеристика этого типа согласуется с требованием бесступенчатого изменения скорости транспортного средства. Поэтому транспортное средство может достигнуть режима бесступенчатого изменения скорости.
Как описано выше, для предотвращения передачи назад к двигателю кинетической энергии, накопленной в эксцентриковых массах 131, в воплощениях изобретения, показанных на фиг.3 и 5, дополнительно устанавливают второе одностороннее сцепление 3 между двигателем и механизмом преобразования крутящего момента, и энергия, таким образом, может быть передана от двигателя только к механизму 1 преобразования крутящего момента в единственном направлении, так чтобы предотвратить передачу назад к двигателю кинетической энергии эксцентриковых сборок 13 для снижения скорости эксцентриковых сборок 13, и, таким образом, воздействия величины момента М пары, как подробно показано на фиг.8D и 9D.
Вышеприведенные воплощения изобретения приведены для иллюстрации. Специалистам в данной области техники будет понятно, что могут быть сделаны модификации и изменения в этих воплощениях без отхода от принципов и духа изобретения. Например, может быть размещено на носителе 12 один или четыре набора эксцентриковых сборок 13. Все эквиваленты подпадают под объем защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ МОЩНОСТИ (ВАРИАНТЫ) И БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1999 |
|
RU2267042C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2494854C2 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1995 |
|
RU2097215C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2083384C1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2006 |
|
RU2310113C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| ВАРИАТОР НА ОСНОВЕ ШЕСТЕРНИ ИЗМЕНЯЕМОГО ДИАМЕТРА | 2013 |
|
RU2563294C2 |
| ЛЕБЕДКА БУРОВОЙ УСТАНОВКИ | 2005 |
|
RU2287479C1 |
| МЕХАНИЗМ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2008 |
|
RU2376512C1 |
| КОРОБКА ПЕРЕДАЧ | 1992 |
|
RU2068516C1 |
Настоящее изобретение относится к механически управляемой бесступенчатой автоматической коробке передач. Автоматическая коробка передач содержит корпус и механизм преобразования крутящего момента, установленный в корпусе. Механизм преобразования крутящего момента содержит входную часть, вращающийся или роторный носитель, одну эксцентриковую сборку, поворотно установленную на носителе, и выходную часть. Входная часть и носитель могут вращаться независимо друг от друга и имеют коллинеарные оси вращения. Каждая из эксцентриковой сборки содержит эксцентриковую массу, которая приводится в движение с возможностью вращения вокруг ее оси вращения посредством входной части. Выходная часть снабжена только одним односторонним сцеплением, непосредственно соединенным с ней. Это позволяет автоматически регулировать выходную скорость и крутящий момент, упростить конструкцию, повысить к.п.д. передачи и увеличить срок службы устройства. 14 з.п. ф-лы, 10 ил.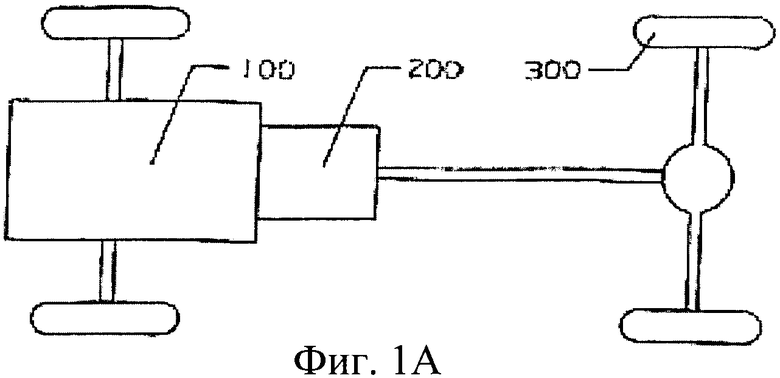
| 0 |
|
SU365896A1 | |
| Громкоговорящий телефон | 1925 |
|
SU2621A1 |
| Планетарная эксцентриковая передача | 1985 |
|
SU1357629A1 |

