Область применения способа фазовекторного анализа сейсмических волн: сейсмология и сейсморазведка. Данный способ анализа сейсмических волн может найти применение при решении задач определения типов волн и моментов их прихода в точку наблюдения при интерференции волн, а также при решении задачи разделения лучей продольных волн, отличающихся углом выхода.
В основе способа фазовекторного анализа сейсмических волн используются результаты трехкомпонентных наблюдений при регистрации волн различных сейсмических источников (взрывы, землетрясения). Сейсмические источники и среда распространения сейсмических волн от них создают в точке наблюдения сложное интерференционное поле линейно поляризованных волн различных типов (продольные, поперечные, обменные), характеризующихся различной скоростью распространения. Определение типов сейсмических волн и моментов их прихода в точку наблюдения при интерференции волн является первостепенной и наиболее сложной задачей при проведении сейсморазведочных работ и сейсмологических исследований [1].
Известен способ поляризационного анализа сейсмических волн (Гальперин Е.И. Поляризационный метод сейсмических исследований. М.: «Недра», 1977, стр.47-55). Данный способ позволяет по модулю и угловым координатам вектора выходных сигналов трехкомпонентного сейсмоприемника строить траектории конца вектора сигналов на плоскости (годографы векторов), а также получать совокупность функций, определяющих изменение во времени модуля и его угловых координат (модулеграмма |U(t)|, азимутограмма w(t) и углограмма v(t)), представляющих сферическую систему координат вектора сигналов. Основной задачей, которая решалась при использовании данного способа, было построение траекторий конца вектора сигналов и изучение закономерности изменения направлений смещения частиц среды в пространстве с использованием стереографических проекций. Задача определения типов сейсмических волн при их интерференции и моментов наложения волн одна на другую с использованием сферических координат вектора и его стереопроекций в одной точке наблюдения не нашла приемлемого решения.
Способ фазовекторного анализа сейсмических волн позволяет решить эту задачу. Сущность этого способа состоит в следующем. Движение частиц среды в точке регистрации сейсмических волн при проведении сейсморазведочных работ или сейсмологических исследований можно представить вектором В прямоугольной системе координат вектор
В прямоугольной системе координат вектор  представляется в виде проекций на оси х, у, z,
представляется в виде проекций на оси х, у, z,  Выходной сигнал трехкомпонентного сейсмоприемника представляется в виде компонент вектора электрического сигнала
Выходной сигнал трехкомпонентного сейсмоприемника представляется в виде компонент вектора электрического сигнала  где
где
Ux(t)=Fx[Sx(t)];
Uy(t)=Fy[Sy(t)];
Uz(t)=Fz[Sz(t)];
Fx, Fy, Fz - линейные операторы преобразования компонент вектора смещения частиц среды сейсмоприемными каналами.
Операторы преобразования компонент вектора смещения частиц среды в частотной области представляются комплексными частотными характеристиками, т.е.
Fx=Kx(jw), Fy=Ky(jw), Fz=Kz(jw).
Выходной сигнал каждого канала сейсмоприемника представляется в виде колебательного процесса, состоящего из нескольких полупериодов для каждой волны. Для трехкомпонентного сейсмоприемника должно выполняться условие идентичности частотных характеристик сейсмоприемных каналов, поскольку только в этом случае будет сохранена линейность поляризации сейсмических волн при отсутствии или частичной интерференции волн.
Наложение одной волны на другую приводит к изменениям положения вектора  в пространстве и соответственно к пространственным изменениям положения вектора
в пространстве и соответственно к пространственным изменениям положения вектора  . Вследствие различия скоростей распространения продольных и поперечных волн наиболее распространенным вариантом наложения сейсмических волн будет частичное наложение. Соответственно угловое (фазовое) положение вектора на плоскости будет определяться типом волны при отсутствии наложения и изменяться при наложении волн.
. Вследствие различия скоростей распространения продольных и поперечных волн наиболее распространенным вариантом наложения сейсмических волн будет частичное наложение. Соответственно угловое (фазовое) положение вектора на плоскости будет определяться типом волны при отсутствии наложения и изменяться при наложении волн.
Пространственный годограф вектора  удобнее анализировать по его проекциям на плоскости прямоугольной системы координат ху, zx, zy. Проекции вектора на плоскости ху, zx, zy можно представить векторами
удобнее анализировать по его проекциям на плоскости прямоугольной системы координат ху, zx, zy. Проекции вектора на плоскости ху, zx, zy можно представить векторами  ,
,  ,
,  , т.е. исходный вектор представляется суммой трех векторов. При решении задачи разделения лучей продольных волн используется вектор, компонентами которого являются радиальная Ur(t) и вертикальная Uz(t) составляющие вектора . Каждому вектору соответствует свои годограф и свой фазовый угол на плоскости, отражающие угловое положение вектора в пространстве и его изменение во времени. Каждый вектор представляется комплексной функцией времени:
, т.е. исходный вектор представляется суммой трех векторов. При решении задачи разделения лучей продольных волн используется вектор, компонентами которого являются радиальная Ur(t) и вертикальная Uz(t) составляющие вектора . Каждому вектору соответствует свои годограф и свой фазовый угол на плоскости, отражающие угловое положение вектора в пространстве и его изменение во времени. Каждый вектор представляется комплексной функцией времени:
Далее производится определение аргументов q(t) этих комплексных функций в заданном временном интервале N, длительность которого определяется интерпретатором и должна соответствовать времени воздействия на сейсмоприемник двух и более сейсмических волн, следующих одна за другой. Анализ всей совокупности сейсмических волн, зарегистрированных в точке наблюдения, производится путем перемещения интервала анализа от начала регистрации сейсмических сигналов до их окончания (скользящий режим анализа).
Результаты анализа аргументов комплексных функций, изменение которых может происходить от 0 до 360 градусов, используются для определения момента наложения одной волны на другую и определения типов волн, участвующих в суперпозиции. Выбор плоскости для анализа проекции вектора определяется интерпретатором. Критерием выбора плоскости проекции вектора для интерпретатора является наличие четкого изменения углового положения вектора относительно положения, соответствующего вектору линейно поляризованной волны. При этом для линейно поляризованных продольных и поперечных волн, не связанных интерференцией, изображение фазы вектора представляется в виде прямоугольных импульсов. На фиг.1 представлено изображение фазы вектора на фазовой плоскости ху продольной и поперечной волны SH без наложения одной волны на другую. На фиг.2 показана форма сигналов продольной и поперечной волн для проекции вектора на ось х при отношении амплитуд волн 0.1, изображение фазы вектора которых представлено на фиг.1. На фиг.3, фиг.4, фиг.5, фиг.6, фиг.7 фиг.8 представлены изображения фазы вектора  и формы сигналов, соответствующих суперпозиции продольной и поперечной волны SH для временных сдвигов, составляющих соответственно 150, 50 и 20 дискретных отсчетов для волны SH относительно вступления продольной волны при отношении амплитуд поперечной и продольной волн, равном 0.1. Стрелками показано начало изменения фазы вектора суперпозиции , которое используется для определения момента наложения одной волны на другую. Время наложения одной волны на другую (время прихода волны в точку наблюдения) при цифровом преобразовании выходных сигналов сейсмоприемника определяется по формуле
и формы сигналов, соответствующих суперпозиции продольной и поперечной волны SH для временных сдвигов, составляющих соответственно 150, 50 и 20 дискретных отсчетов для волны SH относительно вступления продольной волны при отношении амплитуд поперечной и продольной волн, равном 0.1. Стрелками показано начало изменения фазы вектора суперпозиции , которое используется для определения момента наложения одной волны на другую. Время наложения одной волны на другую (время прихода волны в точку наблюдения) при цифровом преобразовании выходных сигналов сейсмоприемника определяется по формуле
t=nt*,
где n - номер дискретного отсчета сейсмического сигнала от взрыва (землетрясения), для которого отмечено начало изменения углового положения вектора на фазовой плоскости;
t* - интервал дискретизации выходных сигналов трехкомпонентного сейсмоприемника при их цифровом преобразовании.
Номер дискретного отсчета n определяется от момента to прихода первой волны от сейсмического источника в точку наблюдения. Погрешность определения времени наложения одной волны на другую зависит от точности определения номера n, временного интервала дискретизации выходных сигналов сейсмоприемника и отношения амплитуд сейсмических волн. Она может находиться в пределах 0.2-2 ms при t*=0.2ms и отношении амплитуд волн при их суперпозиции от 1 до 0.05 для сигналов с преобладающей частотой спектра 50 Гц при превышении амплитуды сигналов уровня микросейсмического шума более 30 дБ и динамическом диапазоне изменения амплитуд сигналов 120-130 дБ. При отношении амплитуды второй волны к амплитуде первой волны больше единицы погрешность определения времени прихода второй волны может составлять менее 0.1 ms.
Определение типа сейсмических волн, участвующих в суперпозиции, производится путем анализа изображения фазы вектора на фазовой плоскости. При частичном наложении сейсмических волн друг на друга для определения типа волн используются следующие признаки:
- наличие изображения фазы вектора на фазовой плоскости в виде прямоугольных импульсов (или их частей), определяющих временные интервалы, свободные от наложения волн друг на друга;
- сложное изменение фазы вектора на фазовой плоскости между прямоугольными импульсами изображения фазы вектора, определяющее временной интервал наложения сейсмических волн друг на друга;
- определенное соотношение уровней и длительностей прямоугольных импульсов, представляющих изображение фазы вектора на фазовой плоскости, связывающее типы волн, участвующих в суперпозиции.
При суперпозиции волн различных типов длительности и уровни импульсов изображения фазы векторов этих волн будут различны. Соотношение длительностей импульсов изображения фазы векторов продольных волн и длительностей импульсов изображения фазы векторов поперечных волн определяется отношением скоростей этих волн. Этот признак определяется различием скоростей распространения продольных и поперечных волн. Уровни импульсов изображения фазы вектора поперечных волн отличаются от уровней импульсов изображения фазы векторов продольных волн на величину, близкую к 90 градусов или равную 90 градусов (вектор поперечных волн ортогонален вектору продольных волн для однородной среды), т.е. при суперпозиции продольных и поперечных волн наблюдается значительный скачок фазы прямоугольных импульсов (фиг.1, фиг.3, фиг.5, фиг.7). Уровни импульсов изображения фазы векторов монотипных волн равны или отличаются на величину, не превышающую 10-20 градусов, связанную с различием сред распространения волн (фиг.9).
Перечисленные признаки изображения фазы векторов сейсмических волн позволяют идентифицировать типы волн, участвующих в суперпозиции при их частичном наложении друг на друга (до 96%).
При исследовании района проведения сейсморазведочных работ может быть более удобным другое представление результатов фазовекторного анализа сейсмических волн при их частичном наложении друг на друга. При суперпозиции двух сейсмических волн годограф вектора на фазовой плоскости можно разделить условно на три части: начальную, среднюю и конечную. Начальная и конечная части годографа соответствуют волнам, имеющим линейную поляризацию (части продольных и поперечных волн, свободные от наложения одной волны на другую). Средняя часть годографа представляется сложной кривой, отражающей неполяризованное движение частиц среды при наложении волн друг на друга. Выделение начальной и конечной частей годографа вектора на фазовой плоскости и изображение их на угловой оси в соответствии с ориентацией вектора на этой плоскости позволяет идентифицировать типы сейсмических волн и иметь представление о соотношении амплитуд сейсмических волн, участвующих в суперпозиции.
Для достижения поставленной цели используется узкая диаграмма направленности с возможностью ее сканирования по углу на фазовой плоскости. Аналитическое выражение такой диаграммы направленности представляется в виде:

где q - аргумент одной из комплексных функций (1);
m - номер шага перемещения диаграммы направленности, m=0÷2pi/g;
g - шаг перемещения диаграммы направленности;
k - масштабный коэффициент.
Шаг перемещения ДН g может выбираться из значений: pi/180; pi/360; pi/720; pi/1800. Меньшему значению g соответствует более продолжительный цикл сканирования ДН. С целью сокращения продолжительности цикла сканирования ДН малые значения g целесообразно выбирать при анализе углового положения вектора в ограниченном угловом интервале.
Вид используемой диаграммы направленности (ДН) при k=30 представлен на фиг.10. Выходной сигнал при сканировании ДН для фазовой плоскости ху представляется в виде
U=UxyF(q-mg),
где  - мгновенное значение модуля вектора на фазовой плоскости ху;
- мгновенное значение модуля вектора на фазовой плоскости ху;
Ux, Uy - дискретные отсчеты выходных сигналов горизонтальных датчиков трехкомпонентного сейсмоприемника.
При каждом отсчете n производится определение Ux и Uy, угла q и модуля Uxy. Для каждого значения q производится сканирование ДН. При q-mg=0 на определенном номере шага m значение U достигает мгновенного значения Uxy, поскольку F(q-mg)=1. Каждый цикл сканирования ДН завершается изображением самой ДН с масштабным коэффициентом, равным значению Uxy, и углом ее ориентации mg=q.
При линейной поляризации (линейном годографе) всем дискретным отсчетам Ux и Uy соответствует одно и то же значение q и номер шага m перемещения ДН. При годографе, характеризующемся сложной кривой, каждому отсчету Ux и Uy будут соответствовать разные значения q и разные номера m шага перемещения ДН. Производя далее суммирование U для всех значений n интервала анализа сигналов N, получается следующий результат: для линейной части годографа число слагаемых в полученной сумме будет равно числу дискретных отсчетов Ux и Uy, дающих одинаковое значение q. При сложном годографе число слагаемых в общем случае будет равно 1 для каждого дискретного значения угла q. Соответственно сумма слагаемых для частей линейно поляризованных волн при интерференции волн будет существенно превосходить значение U для всех значений q на временном интервале интерференции сейсмических волн. Результат суммирования всех циклов сканирования ДН представляется изображением самой ДН, но с масштабным коэффициентом, равным сумме всех дискретных значений Uxy, соответствующих одному значению q. Таким образом можно выделить линейную часть годографа вектора на фазовой плоскости, определить значения углов ориентации линейных частей годографов векторов сейсмических волн, участвующих в суперпозиции. Отношение суммированных значений U до интерференции волн к суммированным значениям U после интерференции волн может быть использовано для решения различных задач сейсмологии и сейсморазведки.
На фиг.11 представлено изображение результата суммирования при сканировании вектора суперпозиции продольной и поперечной волны SH узкой диаграммой направленности. Результат суммирования представляется в виде изображения четырех диаграмм направленности, пики которых на угловой оси соответствуют положению проекции векторов продольной и поперечной волн на фазовой плоскости ху. При этом первый пик ДН соответствует положению вектора продольной волны в первом квадранте, второй пик ДН соответствует положению вектора поперечной волны во втором квадранте (разность углов ориентации векторов этих волн равна 90 градусов), далее третий пик ДН соответствует положению вектора продольной волны в третьем квадранте и, наконец, четвертый пик ДН соответствует положению вектора поперечной волны в четвертом квадранте. Изменение положения векторов продольной и поперечной волн в квадрантах фазовой плоскости связано с импульсным характером выходных сигналов трехкомпонентного сейсмоприемника, состоящих из нескольких полупериодов разной полярности. Амплитуды пиков ДН в каждом квадранте соответствуют сумме дискретных отсчетов модуля вектора, находящегося в том или ином квадранте фазовой плоскости ху. Используя аргументы комплексных функций (1), можно производить сканирование ДН для любой из выбранных интерпретатором плоскостей.
По положению и количеству пиков ДН можно определить типы волн, участвующих в суперпозиции. Так при наличии только двух пиков ДН (фиг.12) можно констатировать, что в суперпозиции участвуют монотипные волны, распространяющиеся в одинаковой среде. Наличие четырех пиков ДН при малом фазовом сдвиге между пиками (фиг.13) свидетельствует о суперпозиции монотипных волн, распространяющихся по разным путям в неоднородной среде. Наличие четырех пиков ДН при фазовом сдвиге между пиками, расположенными в одном или соседних квадрантах, равном или близком к 90 градусах, свидетельствует о суперпозиции продольных и поперечных волн (фиг.11).
Изменяя масштабный коэффициент в выражении (2) в пределах k=300-500, можно получить диаграмму направленности, ширина которой на уровне 0,7 достигает долей градуса. Используя аргумент комплексной функции вектора, составляющие которого представляются модулями проекции вектора смещения частиц среды на горизонтальную плоскость и вертикальной составляющей этого вектора, можно разделить лучи продольных волн, различающихся углом выхода до 0.5-1 градуса. На фиг.14 представлено изображение диаграмм направленности, разделяющих два луча продольных волн, различающихся углом выхода в вертикальной плоскости на 2 градуса.
При описании способа фазо-векторного анализа сейсмических волн предполагалось, что комплексные частотные характеристики каналов трехкомпонентного сейсмоприемника идентичны. Однако реально частотные характеристики каналов трехкомпонентных сейсмоприемников могут иметь различие до 10% и более. Существенные температурные различия условий установки трехкомпонентных сейсмоприемников в скважинах при проведении сейсморазведочных работ приводят к значительным относительным отклонениям параметров датчиков компонент вектора смещения частиц среды, что влечет за собой разрушение поляризационных характеристик сейсмических волн и практически ограничивает возможности применения способа фазовекторного анализа сейсмических волн. В связи с этим возникает необходимость приведения комплексных частотных характеристик каналов трехкомпонентного сейсмоприемника к одной характеристике. Применение известного метода деконволюции [3] (математической операции обратной свертке импульсной характеристики канала с входным воздействием) принципиально позволяет получать выходные сигналы трехкомпонентного сейсмоприемника, соответствующие одинаково преобразованным компонентам вектора смещения частиц среды. Аналогичный результат можно получить применением другого известного метода [4], реализующего перекрестную свертку выходного сигнала одного канала с импульсной характеристикой другого канала.
Различие выходных сигналов трехкомпонентного сейсмоприемника после реализации этих методов приведения комплексных частотных характеристик к одной характеристике состоит в следующем. Применение метода деконволюции дает сокращение длительности выходных сигналов трехкомпонентного сейсмоприемника на время, соответствующее длительности импульсной характеристики одного из каналов. Применение метода перекрестной свертки дает увеличение длительности выходных сигналов трехкомпонентного сейсмоприемника на время, соответствующее длительности импульсной характеристики одного из каналов.
Применение в сейсмоприемных каналах прецизионных аналоговых фильтров или цифровых фильтров, определяющих рабочую полосу частот каналов, позволяет получить каналы с идентичными частотными характеристиками путем выбора датчиков компонент вектора смещения частиц среды, имеющих собственную частоту fo много ниже (в 100 раз) нижней частоты рабочей полосы частот. Применение низкочастотных датчиков позволяет исключить температурные изменения их частотных характеристик на общую характеристику каналов. На фиг.15 показана нормированная частотная характеристика 1 датчика. Рабочая область частот при использовании низкочастотных датчиков с собственной частотой fo определяется в пределах 102fo-103fо.
Поскольку точность определения момента наложения одной волны на другую зависит от соотношения амплитуд сейсмических волн и временного интервала дискретизации при цифровом преобразовании выходных сигналов трехкомпонентного сейсмоприемника, то для того, чтобы погрешность определения момента наложения одной сейсмической волны на другую определялась в основном отношением амплитуд волн, частота дискретизации выходных сигналов сейсмоприемника должна быть достаточно высокой (не менее 50 отсчетов на полупериод выходного сигнала сейсмоприемника).
Выходные сигналы датчиков, применяемых в сейсморазведке, пропорциональны первой или второй производной смещений частиц среды, регистрируемых в точке наблюдения в рабочей полосе частот. При этом амплитуда выходных сигналов датчиков изменяется пропорционально первой или второй степени изменения частоты исходных смещений частиц среды, что сокращает динамический диапазон сейсмоприемной аппаратуры.
Для устранения этого недостатка при реализации способа фазовекторного анализа сейсмических волн производится коррекция амплитудно-частотной характеристики сейсмоприемного канала с помощью однократного 2 (фиг.15) или двукратного применения интегрирующей RC-цепочки с частотой среза (уровень 0.7), соответствующей собственной частоте датчика сейсмоприемного канала или нижней частоте рабочей полосы частот. На фиг.15 представлена результирующая амлитудно-частотная характеристика сейсмоприемного канала 3 с датчиком, преобразователь которого выполнен в виде катушки в магнитном поле, после применения интегрирующей RC-цепочки.
Способ фазовекторного анализа сейсмических волн позволяет определять типы сейсмических волн и момент их прихода в точку наблюдения при их интерференции. При этом степень наложения одной волны на другую может достигать 96%, т.е. достигать почти предельной разрешающей способности волн при наложении одной волны на другую.
Литература
1. И.И.Гурвич, Г.Н.Боганик Сейсмическая разведка. М.: «Недра», 1980.
2. Е.И. Гальперин Поляризационный метод сейсмических исследований. М.: «Недра», 1977, стр.47-55.
3. Э.Р.Канасевич Анализ временных последовательностей в геофизике. М.: «Недра», 1985, стр.160-161.
4. В.Н.Разнатов Способ устранения влияния неидентичности передаточных характеристик приемных каналов, авт. свидет. 180936, 5.11.1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ЛИНЕЙНО ПОЛЯРИЗОВАННЫХ СЕЙСМИЧЕСКИХ ВОЛН | 2010 |
|
RU2436126C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ ПРИ ВОЗДЕЙСТВИИ ПОМЕХ | 2011 |
|
RU2451308C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| Способ сейсмической разведки | 1980 |
|
SU911400A1 |
| Способ поиска и разведки залежей углеводородов (варианты) | 2016 |
|
RU2636799C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
| СПОСОБ УСТРАНЕНИЯ ИСКАЖАЮЩЕГО ВЛИЯНИЯ ВЕРХНЕЙ ЧАСТИ РАЗРЕЗА В СЕЙСМОРАЗВЕДКЕ | 2008 |
|
RU2381529C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| Устройство для исследованияСЕйСМичЕСКиХ пРиЕМНыХ СиСТЕМ | 1979 |
|
SU817626A1 |
| Способ сейсмической разведки | 1980 |
|
SU966634A1 |
Область применения способа фазовекторного анализа сейсмических волн - сейсмология и сейсморазведка. Техническим результатом изобретения является повышение точности исследований. В основе способа используются результаты трехкомпонентных наблюдений при регистрации волн различных сейсмических источников (взрывы, землетрясения). Сущность способа фазовекторного анализа сейсмических волн состоит в том, что для определения момента наложения одной сейсмической волны на другую и идентификации типов волн, участвующих в суперпозиции, из трех компонент вектора сейсмического сигнала формируют три двухкомпонентных вектора, один из которых представляется компонентами, регистрируемыми горизонтальными датчиками, другой представляется компонентами, регистрируемыми вертикальным и одним из горизонтальных датчиков, и третий вектор представляется компонентами, регистрируемыми вертикальным и другим горизонтальным датчиком. Дополнительно формируется четвертый вектор, компонентами которого являются модуль проекции вектора на горизонтальную плоскость и модуль вертикальной составляющей вектора сейсмического сигнала. Способ позволяет определять типы волн и моменты их прихода в точку наблюдения при их суперпозиции, достигающей 96%, т.е. достигнуть практически предельной разрешающей способности. 3 з.п. ф-лы, 15 ил.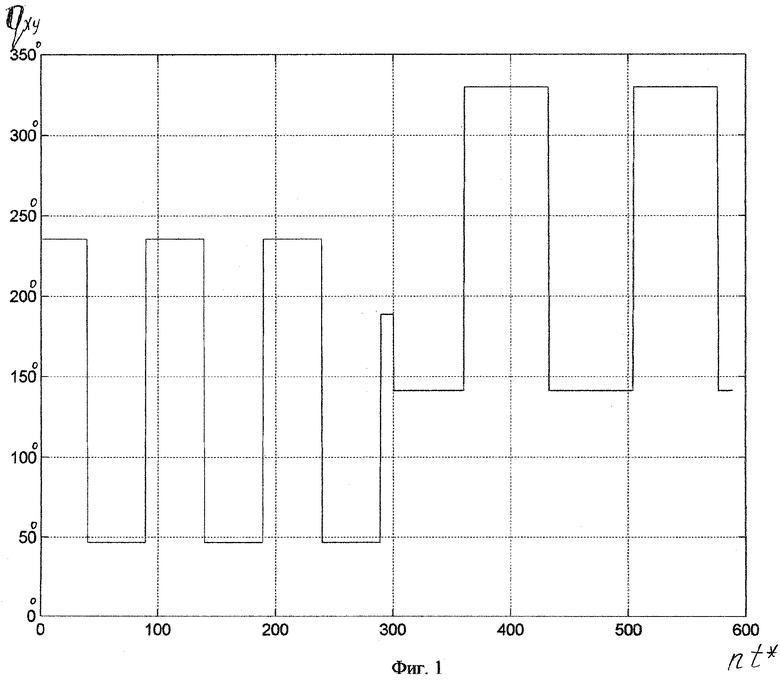
1. Способ, в котором регистрируют сейсмические сигналы трехкомпонентным сейсмоприемником, имеющим два горизонтально ориентированных датчика и один вертикальный датчик, отличающийся тем, что в сейсмоприемных каналах применяют датчики, собственные частоты которых существенно ниже нижней частоты рабочей полосы частот сейсмоприемных каналов, производят коррекцию амплитудно-частотной характеристики сейсмоприемного канала с помощью однократного или двухкратного применения интегрирующей RC-цепочки с частотой среза с уровнем 0.7, соответствующей собственной частоте датчика сейсмоприемного канала или нижней частоте рабочей полосы частот, определяют модуль вектора сейсмических колебаний и значения угловых координат этого вектора в пространстве, являющихся функциями времени, из трех компонент вектора сейсмического сигнала формируют три двухкомпонентных вектора, один из которых представляют компонентами, регистрируемыми горизонтальными датчиками, другой представляют компонентами, регистрируемыми вертикальным и одним из горизонтальных датчиков, и третий вектор представляют компонентами, регистрируемыми вертикальным и другим горизонтальным датчиками, формируют четвертый вектор, компонентами которого являются модуль проекции вектора на горизонтальную плоскость и модуль вертикальной составляющей вектора, при этом каждый из этих векторов аналитически представляют в виде комплексных функций времени, действительной частью которых является одна из составляющих вектора, а мнимой частью является другая составляющая каждого из сформированных векторов, определяют аргументы комплексных функций времени, при этом по изменению аргументов комплексных функций времени на фазовых плоскостях определяют момент наложения одной волны на другую и тип волн, участвующих в суперпозиции, далее производят цикличное сканирование двухкомпонентного вектора узкой диаграммой направленности, являющейся функцией разности каждого дискретного значения аргумента комплексной функции этого вектора и изменяемого с заданным шагом угла положения диаграммы направленности в диапазоне углов от 0 до 360°, с последующим суммированием всех дискретных значений модуля вектора для каждого углового положения диаграммы направленности в заданном временном окне анализа сейсмических сигналов и по положению максимумов суммированных значений модуля вектора на угловой оси положения диаграммы направленности уточняют типы волн, участвующих в суперпозиции, и разделяют лучи продольных волн, отличающихся углом выхода.
2. Способ по п.1, отличающийся тем, что определяют импульсные характеристики сейсмоприемных каналов и производят деконволюцию выходных сигналов с их импульсными характеристиками.
3. Способ по п.1, отличающийся тем, что производят перекрестную свертку выходного сигнала каждого сейсмоприемного канала с импульсной характеристикой другого канала.
4. Способ по п.1, отличающийся тем, что выходные сигналы трехкомпонентного сейсмоприемника преобразуют в цифровой вид с числом дискретизаций на полупериод не менее 50.
| JP 6342079, 13.12.1994 | |||
| СПОСОБ ДЛЯ ОЦЕНКИ ЛАМИНАРНОЙ СТРУКТУРЫ И ДРУГИХ ХАРАКТЕРИСТИК ЗЕМЛИ | 1991 |
|
RU2106000C1 |
| CN 1460867, 10.12.2003 | |||
| Способ оперативного оповещения о землетрясениях | 1989 |
|
SU1674034A1 |

