Область техники
Изобретение относится к области сейсмических исследований и может быть использовано в нефтяной и газовой промышленности, а именно при контроле процесса гидроразрыва пласта залежи углеводородов, в горнодобывающей промышленности для контроля микросейсмичности в окрестности шахт и рудников, в технологиях контроля за соблюдением договора о всеобъемлющем запрещении ядерных испытаний для идентификации мест проведения сильных подземных взрывов.
Предшествующий уровень техники
Наиболее перспективная технология из числа применяемых в настоящее время для мониторинга микросейсмической активности в верхних слоях земной среды (в частности, мониторинга гидроразрыва пластов (ГРП) при добыче нефти и газа [RU, 2319177], [RU, 2305298], [PCT/US 2009/037220, WO/2009/117336] предполагает использование поверхностных групп сейсмических приемников (ПГСП) для регистрации сейсмических волн, излучаемых микросейсмическими источниками. Записи сейсмических сигналов, принятых ПГСП, используются затем для оценивания размеров и геометрии образовавшейся области разрушения среды. ПГСП представляют собой совокупность приборов, регистрирующих колебания частиц земной среды и установленных на поверхности земли или на небольшом углублении под ее поверхностью на расстояниях от 30 до 200 м друг от друга в области, размеры которой определяются глубиной, на которой происходят микросейсмические события.
Известные методы микросейсмического мониторинга различаются, в основном, методами анализа зарегистрированных ПГСП сейсмических сигналов для решения основных задач мониторинга. Такими задачами являются: локация (измерение координат) источников микроземлетрясений, образующихся при техногенном воздействии на земную среду, т.е. определение мест локальных разрывов среды, генерирующих сейсмические волны; определение геометрических характеристик этих разрывов, т.е. направлений образовавшихся трещин среды.
Решение указанных задач на практике затрудняется следующими факторами:
А. Сложностью строения земной среды под ПГСП, включающей область, где происходят микросейсмические события. Не учет имеющейся информации о строении среды приводит к ошибкам в физических моделях распространения сейсмических волн от микросейсмических источников к приемникам ПГСП, т.е. тех моделей, которые используются при решении указанных выше основных задач обработки сейсмических сигналов.
Б. Наличием в записях сейсмических сигналов от микро-землетрясений сильных помех, порождаемых, главным образом, техническими устройствами, которые работают в районе, где производится мониторинг микросейсмичности. В частности, это механизмы, используемые для разработки месторождений нефти или газа.
Известные способы [RU, 2305298], [PCT/US 2009/037220, WO/2009/117336] анализа зарегистрированных ПГСП сейсмических сигналов не в полной мере используют информацию о модели земной среды под сейсмической антенной и совсем не используют информацию о характеристиках помех. При практическом применении этих методов единственными средством компенсации мешающих мониторингу микро-сейсмичности факторов А, Б является увеличение числа сейсмоприемников в ПГСП или помещение последних в глубокие скважины. Оба этих подхода приводят к существенному повышению стоимости мониторинга.
Наиболее близким к предлагаемому в настоящем изобретении является способ измерения координат микросейсмических источников, включающий регистрацию поверхностной группой сейсмических приемников сейсмических сигналов, излучаемых микросейсмическими источниками, и обработку сейсмических сигналов цифровой регистрирующей аппаратурой; при этом производят анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий, в режиме, близком к режиму реального времени, суждение по результатам анализа об обнаружении микросейсмического события и измерение его координат [RU, 2319177].
В патенте [RU, 2319177] описывается способ контроля процесса гидроразрыва пласта, основанный на регистрации сейсмических волн, генерируемых при разрыве пласта в результате закачивания в него рабочей жидкости под давлением. Регистрация сейсмических волн осуществляется совокупностью сейсмоприемников, расположенных на поверхности земли и образующих поверхностную сейсмическую группу сейсмических датчиков (ПГСП, сейсмическая антенна). Механический процесс разрыва пласта интерпретируется как последовательность микросейсмических событий, генерирующих сейсмические волны. Волны от каждого из событий регистрируются ПГСП и обрабатываются с целью определения положения данного сейсмического события в области среды, где производится гидроразрыв.
Обработке последовательно подвергаются записи сигналов ПГСП в пределах движущегося во времени «скользящего временного окна». Для каждого положения временного окна определяются координаты точки минимума функционала

где
х, y, z - предполагаемые координаты источника микросейсмического события;
V - скорость эквивалентной сферической сейсмической волны, переносящей энергию от источника к сейсмоприемникам ПГСП,  - наблюдаемая разность времен прихода сейсмических волн на сейсмоприемники с номерами i и j; эта величина вычисляется в рассматриваемом способе как лаг (аргумент) максимального значения оценки взаимной корреляционной функции сигналов сейсмоприемников с номерами i и j, зарегистрированных в анализируемом временном окне;
- наблюдаемая разность времен прихода сейсмических волн на сейсмоприемники с номерами i и j; эта величина вычисляется в рассматриваемом способе как лаг (аргумент) максимального значения оценки взаимной корреляционной функции сигналов сейсмоприемников с номерами i и j, зарегистрированных в анализируемом временном окне;
 - максимальное значение указанной корреляционной функции;
- максимальное значение указанной корреляционной функции;
 - ожидаемая разность времен прихода сейсмических волн на сейсмоприемники с номерами i и j, вычисляемая по формуле
- ожидаемая разность времен прихода сейсмических волн на сейсмоприемники с номерами i и j, вычисляемая по формуле
 ,
,
где  - расстояние между точкой
- расстояние между точкой  расположения i-го сейсмоприемника и предполагаемой точкой
расположения i-го сейсмоприемника и предполагаемой точкой  расположения источника события;
расположения источника события;
суммирование в формуле (1) производится по всем парам сейсмоприемников с номерами i, j, для которых  , где K - некоторый порог (настроечный параметр функционала).
, где K - некоторый порог (настроечный параметр функционала).
Близость к нулю минимума функционала свидетельствует о наличии микросейсмического источника, а координаты  ,
,  ,
,  точки минимума функционала принимаются за оценку координат этого источника.
точки минимума функционала принимаются за оценку координат этого источника.
Существенные недостатки предложенного в этом патенте способа контроля ГРП следующие:
Для определения координат источников микросейсмических событий не используется информация о строении среды под ПГСП в области, включающей область гидроразрыва. Вместо этого, по существу, предполагается, что среда однородная, и сейсмические волны, излучаемые источниками, распространяются в ней как сферические волны. Поскольку указанное предположение может быть приближенно справедливо только для весьма ограниченной области регистрации волн на поверхности, геометрический размер ПГСП (апертура сейсмической антенны), для обработки данных которой может применяться приведенное в описании изобретения математическое выражение функционала, весьма ограничен. Из теории и практики использования сейсмических антенн следует, что при наличии помех малая апертура приводит к большой вероятности появления «ложных» сейсмических источников (обусловленных только шумами) и малой точности определения координат реально существующих микросейсмических источников.
При локации микросейсмических источников путем анализа записей ПГСП с помощью известного функционала F(x,y,z,V) не учитываются статистические характеристики случайных помех, воздействующих на приемники сейсмической антенны. Такой учет чрезвычайно важен, так как в районах регистрации микросейсмической активности, в частности в районах разработки залежей углеводородов, существуют интенсивные сейсмические помехи, генерируемые техническими устройствами, работающими в этих районах. Эти источники имеют сильную пространственную корреляцию, из за которой значения  положений максимумов функций взаимной корреляции сигналов сейсмоприемников с номерами i и j определяются уже не только волнами от сейсмического источника, но и волнами помех. Это неизбежно приводит и к большой вероятности появления «ложных» источников, и к ошибке измерения координат реально существующих микросейсмических источников.
положений максимумов функций взаимной корреляции сигналов сейсмоприемников с номерами i и j определяются уже не только волнами от сейсмического источника, но и волнами помех. Это неизбежно приводит и к большой вероятности появления «ложных» источников, и к ошибке измерения координат реально существующих микросейсмических источников.
Указанные ограничения приводят к тому, что при практической реализации этого способа обнаруживается большое число «ложных» источников, связанных с влиянием сейсмических помех, а оцененные координаты реальных сейсмических источников существенно отличаются от их истинных положений. В результате весьма неточно определяется область, в которой происходит разрушение среды при техногенном воздействии, и для уточнения этой области приходится применять интерактивную обработку «облака» обнаруженных сейсмических событий (фокусировку - в терминах описываемого патента) с помощью квалифицированного оператора. Это существенно затрудняет мониторинг гидроразрыва пласта в близком к реальному масштабе времени.
Раскрытие изобретения
Решаемая изобретением задача - улучшение технико-эксплуатационных характеристик.
Технический результат, который может быть получен при осуществлении заявленного способа, - повышение вероятности обнаружения истинных микросейсмических событий и улучшение точности определения координат микросейсмических источников.
Для решения поставленной задачи с достижением указанного технического результата в известном способе измерения координат микросейсмических источников, включающем регистрацию поверхностной группой сейсмических приемников сейсмических сигналов, излучаемых микросейсмическими источниками, обработку сейсмических сигналов цифровой аппаратурой в режиме, близком к режиму реального времени, анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий, суждение по результатам анализа об обнаружении микросейсмического события и измерение его координат, согласно изобретению используют, в основном, фазовые характеристики регистрируемых сейсмических сигналов и при анализе цифровых записей сейсмических сигналов вычисляют новый функционал

 ,
,
где
r - трехмерные векторы координат точек анализируемой области среды Q, в которых возникают микро-землетрясения;
 - пороговая функция, Ског - порог когерентности данных - настроечный параметр процедуры анализа цифровых сейсмических записей,
- пороговая функция, Ског - порог когерентности данных - настроечный параметр процедуры анализа цифровых сейсмических записей,
 - измеренное значение функции когерентности сейсмических сигналов, зарегистрированных сейсмическими приемниками с номерами k и l, на частотах
- измеренное значение функции когерентности сейсмических сигналов, зарегистрированных сейсмическими приемниками с номерами k и l, на частотах  , где fд - частота дискретизации сигналов поверхностной группы сейсмических приемников, N - число дискретных многоканальных наблюдений поверхностной группы сейсмических приемников на интервале
, где fд - частота дискретизации сигналов поверхностной группы сейсмических приемников, N - число дискретных многоканальных наблюдений поверхностной группы сейсмических приемников на интервале  скользящего временного окна с начальным временем Токна и длительностью Т (сек),
скользящего временного окна с начальным временем Токна и длительностью Т (сек),
 - диапазон частот сигналов, в котором производится локация микросейсмического источника,
- диапазон частот сигналов, в котором производится локация микросейсмического источника,
М - число датчиков поверхностной группы сейсмических приемников,
 - ожидаемые разности фаз на частотах
- ожидаемые разности фаз на частотах  сигналов от микросейсмического источника в точке r, регистрируемых приемниками с номерами k и l,
сигналов от микросейсмического источника в точке r, регистрируемых приемниками с номерами k и l,
 наблюдаемые разности фаз на частотах
наблюдаемые разности фаз на частотах  реальных сейсмических сигналов, зарегистрированных приемниками с номерами k и l,
реальных сейсмических сигналов, зарегистрированных приемниками с номерами k и l,
b(ψ), b(0)=1 - настроечная функция процедуры анализа,
при этом первая сумма в функционале Ф(r,V) вычисляется по всем парам приемников поверхностной группы сейсмических приемников, имеющим различные номера;
затем устанавливают значение аргумента r функционала Ф(r,V), в котором этот функционал достигает максимума, по которому определяют измеренное значение координат  микросейсмического источника
микросейсмического источника
где
Q - область земной среды под поверхностной группой сейсмических приемников, в которой ищутся источники микросейсмических событий,
ΔV - заданный интервал возможных скоростей сейсмических волн от источника.
Возможны дополнительные варианты осуществления способа, в которых целесообразно, чтобы:
- ожидаемые разности фаз вычислялись на основе модели однородной земной среды по формуле
 , где
, где
 , k∈1, …, M - вектор координат датчиков группы,
, k∈1, …, M - вектор координат датчиков группы,
 - неизвестная скорость сейсмических волн в однородной среде,
- неизвестная скорость сейсмических волн в однородной среде,
r=(х,y,z) - вектор ожидаемых координат источника;
- ожидаемые разности фаз Δφl,k(r,fj) вычислялись по формуле
 , где
, где
T(d,z), d∈[0,R], z∈[Z1,Z2] - семейство годографов сейсмических волн (Аки К., Ричардс П. Количественная сейсмология М.: Мир, 1983) от источников в области
Q возможных расположений источников,
R - апертура ПГСП,
Z1, Z2 - границы глубин ожидаемых источников;
семейство годографов T(d,z), d∈[0,R], z∈[Z1,Z2] рассчитывается на основании заданной скоростной модели среды под ПГСП;
 ,
,
xk, yk, zk - координаты k-го сейсмоприемника,
r=(х,y,z) - ожидаемые координаты источника;
- ожидаемые разности фаз Δφl,k(r,fj) вычислялись по формуле
 , где
, где
 (d,z), d∈[0,R], z∈[Z1,Z2] - измеренные функции годографов сейсмических волн от источников в области Q возможных расположений источников,
(d,z), d∈[0,R], z∈[Z1,Z2] - измеренные функции годографов сейсмических волн от источников в области Q возможных расположений источников,
R - апертура ПГСП,
Z1, Z2 - границы глубин ожидаемых источников;
измеренные функции (d,z), d∈[0,R], z∈[Z1,Z2] вычисляются на основании задержек  k∈1, …, M сигналов, зарегистрированных приемниками ПГСП от ведущих событий (master events) с известными координатами источников (xв,yв,zв)∈Q, а именно - таких событий, которые зарегистрированы ПГСП с большим отношением сигнал - помеха,
k∈1, …, M сигналов, зарегистрированных приемниками ПГСП от ведущих событий (master events) с известными координатами источников (xв,yв,zв)∈Q, а именно - таких событий, которые зарегистрированы ПГСП с большим отношением сигнал - помеха,
 ,
,
xk, yk, zk - координаты k-го сейсмоприемника,
r=(х,y,z) - ожидаемые координаты источника.
Предлагаемый в настоящем изобретении способ измерения координат микросейсмических источников при воздействии помех, зарегистрированных ПГСП, позволяет существенно уменьшить влияние факторов А и Б на эффективность микросейсмического мониторинга с помощью ПГСП. Это позволяет при практическом применении метода уменьшить число сейсмоприемников в ПГСП и/или устранить необходимость заглубления их в скважины. Использование изобретения приведет к значительному уменьшению стоимости мониторинга микросейсмичности, особенно в случае сейсмического мониторинга ГРП с помощью ПГСП.
Сущность изобретения заключается в способах накопления и эффективного использования информации о принимаемых сигналах с учетом физических свойств земной среды в районе мониторинга микро-сейсмичности и статистических характеристик помех, маскирующих регистрируемые ПГСП сейсмические сигналы.
Существенные особенности предлагаемого способа заключаются в следующем.
Предлагаемый способ учитывает то, что и воздействие помех на сейсмические сигналы, и влияние на них земной среды в сложно устроенной приповерхностной области, в которой проявляется техногенная микросейсмичность, существенно зависят от доминирующих частот сигналов и помех. Поэтому заявленный способ предполагает анализ зарегистрированных ПГСП сигналов в частотной области, после преобразовании их с помощью быстрого преобразования Фурье (БПФ).
Заявленный способ основан на измерении новых характеристик сейсмических сигналов и на современных математических методах статистического анализа случайных наблюдений. А именно, он учитывает, что влиянию помех в максимальной степени подвергается амплитудная информация и в гораздо меньшей степени - фазовая информация, содержащаяся в принимаемых ПГСП сигналах. Этот теоретический факт подтверждается тем обстоятельством, что подавляющее большинство устройств передачи информации в радиосвязи, радио- и гидролокации и других областях основано на фазовой (или частотной, что, по существу - то же самое) модуляции передаваемых и принимаемых сигналов. Кроме того, этот способ предполагает контроль действительного отношения сигнал-помеха в различных парах приемников ПГСП на различных частотах в диапазоне сигналов микросейсмических источников. Этот контроль осуществляется путем вычисления функций когерентности записей сигналов на различных парах приемников и анализе с целью локации источника записей только тех пар приемников и только на тех частотах, где значения функций когерентности достаточно велики.
Указанные преимущества, а также особенности настоящего изобретения поясняются лучшими вариантами его выполнения со ссылками на прилагаемые фигуры.
Краткий перечень чертежей
Фиг.1 изображает функциональную схему устройства для реализации заявленного способа;
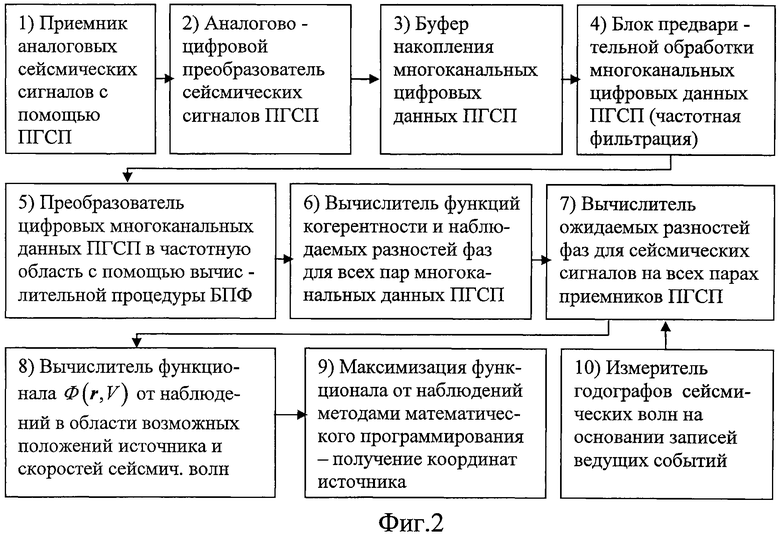
фиг.2 - то же, что фиг.1, другой вариант.
Лучшие варианты осуществления изобретения
Предлагаемые варианты функциональных схем устройств локации микросейсмических сигналов для осуществления заявленного способа основаны на общем способе анализа данных ПГСП и классифицируются в соответствии с объемом информации о строении земной среды под ПГСП. Эта информация, как правило, задается в техническом задании (ТЗ) на применение устройства локации в конкретной задаче микросейсмического мониторинга.
Базовое устройство, наиболее близкое к описанному выше ближайшему аналогу, требует наименьшей информации. Другие варианты базового устройства - это устройства, использующие различную априорную информацию.
Базовое устройство локации
Базовое устройство (Устройство I) применяется, когда в ТЗ отсутствует информация о строении земной среды под ПГСП. Модель земной среды под ПГСП представляется эквивалентной моделью однородной среды с постоянной, но неизвестной скоростью распространения сейсмических волн V в интервале ΔV.
Базовое устройство функционирует в соответствии со следующей формулой для измерения координат микросейсмического источника:
где 
где обозначено
- измеренное значение координат микросейсмического источника, получаемое в результате анализа записей ПГСП при данном положении скользящего окна;
r - трехмерные векторы координат точек анализируемой области среды Q, в которых возникают микро-землетрясения;
 - значение аргумента r функционала Ф(r,V), в котором этот функционал достигает максимума;
- значение аргумента r функционала Ф(r,V), в котором этот функционал достигает максимума;
 - пороговая функция, Cког - порог когерентности данных - настроечный параметр процедуры анализа цифровых сейсмических записей;
- пороговая функция, Cког - порог когерентности данных - настроечный параметр процедуры анализа цифровых сейсмических записей;
 - измеренное значение функции когерентности сейсмических сигналов, зарегистрированных сейсмическими приемниками с номерами k и l, на частотах
- измеренное значение функции когерентности сейсмических сигналов, зарегистрированных сейсмическими приемниками с номерами k и l, на частотах  , где fд - частота дискретизации сигналов ПГСП, N - число дискретных многоканальных наблюдений ПГСП на интервале
, где fд - частота дискретизации сигналов ПГСП, N - число дискретных многоканальных наблюдений ПГСП на интервале  скользящего временного окна с начальным временем Токна и длительностью Т (сек);
скользящего временного окна с начальным временем Токна и длительностью Т (сек);
 - диапазон частот сигналов, в котором производится локация микросейсмического источника;
- диапазон частот сигналов, в котором производится локация микросейсмического источника;
М - число датчиков ПГСП;
 - ожидаемые разности фаз на частотах
- ожидаемые разности фаз на частотах  сигналов от микросейсмического источника в точке r, регистрируемых приемниками с номерами k и l,
сигналов от микросейсмического источника в точке r, регистрируемых приемниками с номерами k и l,
 наблюдаемые разности фаз на частотах
наблюдаемые разности фаз на частотах  реальных сейсмических сигналов, зарегистрированных приемниками с номерами k и l,
реальных сейсмических сигналов, зарегистрированных приемниками с номерами k и l,
b(ψ), b(0)=1 - настроечная функция процедуры анализа;
Q - область земной среды под ПГСП, в которой ищутся источники микросейсмических событий;
ΔV - заданный интервал возможных скоростей сейсмических волн от источника;
первая сумма в функционале (1) вычисляется по всем парам приемников ПГСП, имеющим различные номера.
Ожидаемые разности фаз вычисляются на основе модели однородной земной среды по формуле

где  , k∈1, …, M - координаты приемников ПГСП,
, k∈1, …, M - координаты приемников ПГСП,  - неизвестная скорость сейсмических волн в однородной среде.
- неизвестная скорость сейсмических волн в однородной среде.
Базовое устройство, функционирующее согласно формулам (1), (2), состоит из следующих блоков, выполненных на основе цифровой вычислительной техники (фиг.1):
1) Блока 1 - блок приема аналоговых сейсмических сигналов xk(f), t∈[0,Т]; k=1, …, М, с помощью М сейсмоприемников, образующих ПГСП.
2) Блока 2 - аналого-цифрового преобразователя для преобразования сигналов xk(t), t∈[0,T]; k=1, …, M, в последовательности дискретных отсчетов xk,t, t=1, …, N, k=1, …, M, с заданной частотой дискретизации fд. Эти отсчеты образуют в совокупности последовательность многоканальных цифровых данных ПГСП  , t=1, …, N, используемых для обнаружения и локации микросейсмических источников.
, t=1, …, N, используемых для обнаружения и локации микросейсмических источников.
3) Блока 3 - буфера накопления многоканальных дискретных цифровых данных xt, t=1, …, N и передачи этих данных для обработки следующими блоками в режиме, близком к режиму реального времени.
4) Блока 4 - устройства предварительной обработки многоканальных цифровых данных. Этот блок обеспечивает считывание из буфера многоканальных отсчетов xt, t=1, …, N на очередном интервале скользящего окна, предварительную обработку этих данных: частотную фильтрацию и исправления возможных технических искажений, устранение сильных импульсных техногенных помех.
5) Блока 5 - преобразователя цифровых многоканальных данных ПГСП xt, t=1, …, N в частотную область.
В результате в этом блоке образуется многоканальная последовательность x(fj),  , j=1, …, N «частотных отсчетов» данных ПГСП на интервале скользящего временного окна.
, j=1, …, N «частотных отсчетов» данных ПГСП на интервале скользящего временного окна.
6) Блока 6 - вычислителя амплитудно-фазовой информации в цифровых многоканальных данных ПГСП на основе «частотных отсчетов» x(fj),  , fj∈Δf. В блоке вычисляются следующие величины:
, fj∈Δf. В блоке вычисляются следующие величины:
б) функции когерентности  для всех пар компонент многоканальных данных ПГСП на частотах
для всех пар компонент многоканальных данных ПГСП на частотах  ;
;
в) наблюдаемые разности фаз  многоканальных сейсмических сигналов на всех парах приемников ПГСП.
многоканальных сейсмических сигналов на всех парах приемников ПГСП.
7) Блока 7 - вычислителя ожидаемых разностей фаз  сейсмических сигналов на всех парах приемников ПГСП, которые соответствуют источнику в данной точке r∈Q исследуемой области земной среды и данной скорости V∈ΔV сферических сейсмических волн (в соответствии с формулой (2)).
сейсмических сигналов на всех парах приемников ПГСП, которые соответствуют источнику в данной точке r∈Q исследуемой области земной среды и данной скорости V∈ΔV сферических сейсмических волн (в соответствии с формулой (2)).
8) Блока 8 - вычислителя функционала Ф(r,V) от наблюдений в области r∈Q, V∈ΔV возможных расположений источника и скоростей волн в соответствии с формулой (1). При вычислениях в блоке 8 учитываются (благодаря функции  ) только те слагаемые, для которых вычисленные функции когерентности больше некоторого порога:
) только те слагаемые, для которых вычисленные функции когерентности больше некоторого порога:  . Т.е. учитываются только те пары датчиков и те частоты fj, в которых отношение сигнал - шум достаточно велико. Также используется та функция
. Т.е. учитываются только те пары датчиков и те частоты fj, в которых отношение сигнал - шум достаточно велико. Также используется та функция  , b(0)=1, которая в наибольшей степени соответствует статистическим характеристикам реальных помех и отношению сигнал - помеха микросейсмических источников при конкретном применении.
, b(0)=1, которая в наибольшей степени соответствует статистическим характеристикам реальных помех и отношению сигнал - помеха микросейсмических источников при конкретном применении.
9) Блока 9 - вычислителя точки  максимума функционала Ф(r,V) методами математического программирования, например, методом сопряженных градиентов (Амосов А.А., Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров. М.: Высш. школа, 1994, 544 с.).
максимума функционала Ф(r,V) методами математического программирования, например, методом сопряженных градиентов (Амосов А.А., Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров. М.: Высш. школа, 1994, 544 с.).
Устройство II
Является техническим расширением базового устройства, применяется, когда в ТЗ задано семейство годографов сейсмических волн, для сетки ожидаемых глубин микросейсмических источников.
Устройство II (фиг.1) также основано на алгоритме локации источника, определяемом формулой (1). Но в устройстве II используемые в функционале (1) ожидаемые разности фаз  на частотах fj в каждой паре сейсмоприемников с номерами l, k не зависят от неизвестной скорости сейсмических волн и вычисляются не согласно формуле (2), а на основе семейства годографов сейсмических волн (Аки К., Ричардс П. Количественная сейсмология М.: Мир, 1983), вычисленного по заданной скоростной модели среды под ПГСП по формуле
на частотах fj в каждой паре сейсмоприемников с номерами l, k не зависят от неизвестной скорости сейсмических волн и вычисляются не согласно формуле (2), а на основе семейства годографов сейсмических волн (Аки К., Ричардс П. Количественная сейсмология М.: Мир, 1983), вычисленного по заданной скоростной модели среды под ПГСП по формуле

где T(d,z), d∈[0,R], z∈[Z1,Z2] - семейство годографов сейсмических волн от источников в области Q возможных расположений источника, вычисленное по заданной скоростной модели среды,
R - апертура ПГСП,
Z1, Z2 - границы глубин ожидаемых источников,
 , x
k, yk, zk - координаты k-го сейсмоприемника,
, x
k, yk, zk - координаты k-го сейсмоприемника,
r=(x,y,z) - ожидаемые координаты источника.
Максимизация функционала Ф(r) (1) (уже не зависящего от неизвестной скорости сейсмических волн V) производится или одним из известных методов максимизации функций многих переменных (методами математического программирования), или путем вычисления значений на сетке значений 3-мерного вектора r в заданной области Q возможных расположений источника. После этого производится выбор той точки на сетке в области Q, в которой достигнута максимальная величина функционала (1) на множестве всех вычисленных значений Ф(r).
Функциональная схема устройства II полностью совпадает с блок-схемой базового устройства I (фиг.1), но блоки 7 и 9 устройства II функционируют отлично от соответствующих блоков базового устройства. Вычисления в блоке 7 производятся по формуле (3) (а не по формуле (2), как для базового устройства I). Максимизация функционала Ф(r) (зависящего от 3, а не от 4 переменных, как в базовом устройстве) осуществляется или перебором его значений по сетке в области Q ожидаемых положений источника, или известными, более точными и быстрыми методами максимизации функций от многих переменных методами математического программирования (Амосов А.А., Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров. М.: Высш. школа, 1994, 544 с.).
Устройство III
Устройство III является техническим расширением устройства II. Применяется, когда годографы сейсмических волн для нескольких глубин источников могут быть получены путем обработки сигналов от источников, зарегистрированных с достаточно большим отношением сигнал-шум (ведущих источников (master events)).
Микросейсмические источники из контролируемой области пространства под ПГСП, сейсмические сигналы которых зарегистрированы ПГСП с достаточно большим отношением сигнал - шум, будем называть ведущими событиями. В частности, ведущими событиями при гидроразрывах нефтесодержащих и газосодержащих пластов (ГРП) могут быть источники сейсмических волн, возникающие в результате таких технологических операций ГРП, как перфорация обсадной трубы скважины для последующей закачки рабочей жидкости или подрыв распределенного заряда в скважине для ее очистки. В качестве ведущих событий могут также выступать достаточно сильные сейсмические события, вызванные закачкой рабочей жидкости в скважину при ГРП. Ниже, в основном, рассматривается именно эта область применения изобретения. Координаты (xв,yв,zв)∈Q каждого из ведущих событий обычно или заданы в ТЗ, или могут быть достаточно точно измерены с помощью базового устройства, благодаря большому отношению сигнал-помеха в их записях.
Сигналы ведущего события, зарегистрированные на различных сейсмоприемниках группы, имеют вид

где
τk - задержки сигналов, равные времени распространения сейсмических волн от ведущего события до каждого из сейсмоприемников;
uk,t - волновые формы сигналов сейсмоприемников, представляющие собой реверберацию сигнала, излученного источником, в результате многократных отражений сейсмических волн и изменений их типов на границах слоистой среды под группой;
ξk,t - сейсмические помехи, на фоне которых регистрируются сигналы ведущего события.
Сигналы sk,t несут как информацию о годографе сейсмических волн от источника на глубине ГРП z0, заключающуюся в значениях τk, k∈1, …, M, так и более «тонкую» информацию о временной форме сигнала источника и характере ее линейных преобразований средой, которая заключена во временных формах uk,t сигналов, зарегистрированных каждым из сейсмоприемников группы. Указанная информация может быть использована при локации других источников, возникающих при ГРП, возмещая отсутствие заданной в ТЗ информации о модели среды под группой.
Последовательность вычислительных операций в блоках устройства III для локации микросейсмических событий, основанных на использовании записей ведущих событий, заключается в следующем.
а). Производятся измерения  , k∈1, …, M задержек сигналов от ведущих событий с координатами (xв,yв,zв) в каждом из сейсмоприемников ПГСП. Задержки , k∈1, …, M вычисляются в результате специальной обработки каждого из сигналов (4), описанной, в частности, в публикации (Pisarenko V.F., Kushnir A.F., Savin I.V. Statistical adaptive algorithms for estimation of onset moments of seismic phases. // Physics of the Earth and Planetary Interiors, vol.47, 1987, p.4-10).
, k∈1, …, M задержек сигналов от ведущих событий с координатами (xв,yв,zв) в каждом из сейсмоприемников ПГСП. Задержки , k∈1, …, M вычисляются в результате специальной обработки каждого из сигналов (4), описанной, в частности, в публикации (Pisarenko V.F., Kushnir A.F., Savin I.V. Statistical adaptive algorithms for estimation of onset moments of seismic phases. // Physics of the Earth and Planetary Interiors, vol.47, 1987, p.4-10).
б). Производится измерение годографов сейсмических волн  где R - апертура ПГСП, z∈[Z1,Z2], Z1, Z2 - границы глубин ожидаемых микросейсмических событий. Функции
где R - апертура ПГСП, z∈[Z1,Z2], Z1, Z2 - границы глубин ожидаемых микросейсмических событий. Функции  вычисляются методом полиномиальной регрессии (Ивченко Г.И., Медведев Ю.И. Математическая статистика. М.: Высш. школа, 1984, 245 с.) по значениям
вычисляются методом полиномиальной регрессии (Ивченко Г.И., Медведев Ю.И. Математическая статистика. М.: Высш. школа, 1984, 245 с.) по значениям  , k∈1, …, M, где
, k∈1, …, M, где  , xk, yk - горизонтальные координаты датчиков группы,
, xk, yk - горизонтальные координаты датчиков группы,  , xв, yв, zв - координаты ведущих событий, , k∈1, …, M, - задержки сигналов ведущих событий, измеренные согласно методике пункта а).
, xв, yв, zв - координаты ведущих событий, , k∈1, …, M, - задержки сигналов ведущих событий, измеренные согласно методике пункта а).
в). Процедура локации источника определяется формулами (1), (3), в которых вместо заданных в ТЗ функций  ,
,  подставляются измеренные согласно процедурам п.а), б) функции
подставляются измеренные согласно процедурам п.а), б) функции

где  , x
k, yk, zk - координаты k-го датчика группы,
, x
k, yk, zk - координаты k-го датчика группы,
х, y, z - ожидаемые координаты источника.
Функциональная схема устройства III (фиг.2) почти полностью совпадает с блок-схемой устройства II (фиг.1). Отличие этих блок-схем заключается в следующем. В блок-схеме устройства III введен дополнительный блок 10, в котором согласно процедурам пунктов а), б) производится измерение годографов  сейсмических волн на основании записей ведущих событий (4). Измеренные годографы используются в блоке 7 (фиг.2).
сейсмических волн на основании записей ведущих событий (4). Измеренные годографы используются в блоке 7 (фиг.2).
Промышленная применимость
Наиболее успешно заявленный способ измерения координат микросейсмических источников при воздействии помех промышленно применим в нефтяной и газовой промышленности, в горнодобывающей промышленности, в технологиях контроля проведения ядерных испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ | 2011 |
|
RU2451307C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ И ПАРАМЕТРОВ МЕХАНИЗМОВ ИХ ОЧАГОВ В УСЛОВИЯХ СИЛЬНЫХ СЕЙСМИЧЕСКИХ ПОМЕХ (ВАРИАНТЫ) | 2012 |
|
RU2494418C1 |
| СПОСОБ КОНТРОЛЯ РАЗРАБОТКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ ПО МИКРОСЕЙСМИЧЕСКОЙ ЭМИССИИ | 2006 |
|
RU2309434C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОЦЕССОВ ГИДРОРАЗРЫВА ПЛАСТА ПРИ РАЗРАБОТКЕ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ПРОЦЕССОВ ТЕПЛОВОГО ВОЗДЕЙСТВИЯ ПРИ РАЗРАБОТКЕ ВЫСОКОВЯЗКИХ УГЛЕВОДОРОДОВ | 2020 |
|
RU2758263C1 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ГИДРОРАЗРЫВА ПЛАСТА ЗАЛЕЖИ УГЛЕВОДОРОДОВ | 2006 |
|
RU2319177C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБРАБОТКИ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ | 2008 |
|
RU2457513C2 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2011 |
|
RU2483330C1 |
| СПОСОБ МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИСТОЧНИКОВ ЭМИССИИ И РАССЕЯННОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278401C1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2009 |
|
RU2415449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
Изобретение относится к области геофизики и может быть использовано при контроле микросейсмических событий. Заявленный способ включает регистрацию поверхностной группой сейсмических приемников сейсмических сигналов, излучаемых микросейсмическими источниками, обработку сейсмических сигналов цифровой аппаратурой. Производят анализ цифровых записей сейсмических сигналов в скользящем временном окне. Анализ проводят в частотной области зарегистрированных сигналов. При анализе цифровых записей сейсмических сигналов вычисляют определенный функционал, учитывающий, в основном, фазовую информацию спектральных компонент сейсмических сигналов. Устанавливают значение аргумента этого функционала, в котором этот функционал достигает максимума, по которому определяют измеренное значение координат микросейсмического источника. Технический результат: повышение вероятности обнаружения истинных микросейсмических событий и улучшение точности определения их координат. 3 з.п. ф-лы, 2 ил.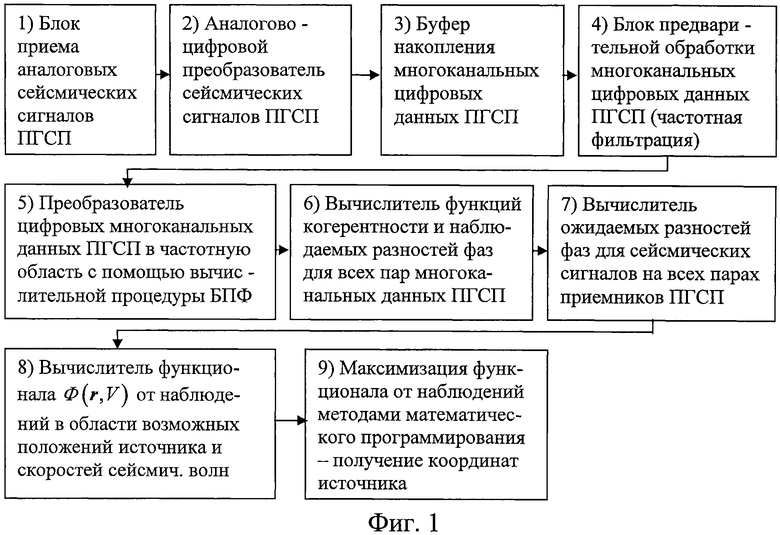
1. Способ измерения координат микросейсмических источников, включающий регистрацию поверхностной группой сейсмических приемников сейсмических сигналов, излучаемых микросейсмическими источниками, обработку сейсмических сигналов цифровой аппаратурой, при этом производят анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий, суждение по результатам анализа об обнаружении микросейсмического события и измерение его координат, отличающийся тем, что используют фазовые характеристики регистрируемых сейсмических сигналов и при анализе цифровых записей сейсмических сигналов вычисляют функционал

где r - трехмерные векторы координат точек анализируемой области среды Q, в которых возникают микроземлетрясения;
 - пороговая функция;
- пороговая функция;
Ског - порог когерентности данных - настроечный параметр процедуры анализа цифровых сейсмических записей;
 - измеренное значение функции когерентности сейсмических сигналов, зарегистрированных сейсмическими приемниками с номерами k и l, на частотах
- измеренное значение функции когерентности сейсмических сигналов, зарегистрированных сейсмическими приемниками с номерами k и l, на частотах  , где fд - частота дискретизации сигналов поверхностной группы сейсмических приемников, N - число дискретных многоканальных наблюдений поверхностной группы сейсмических приемников на интервале
, где fд - частота дискретизации сигналов поверхностной группы сейсмических приемников, N - число дискретных многоканальных наблюдений поверхностной группы сейсмических приемников на интервале  скользящего временного окна с начальным временем Токна и длительностью Т, с;
скользящего временного окна с начальным временем Токна и длительностью Т, с;
 - диапазон частот сигналов, в котором производится локация микросейсмического источника;
- диапазон частот сигналов, в котором производится локация микросейсмического источника;
М - число датчиков поверхностной группы сейсмических приемников,
 - ожидаемые разности фаз на частотах
- ожидаемые разности фаз на частотах  сигналов, регистрируемых приемниками с номерами k и l, от микросейсмического источника в точке r;
сигналов, регистрируемых приемниками с номерами k и l, от микросейсмического источника в точке r;
 - наблюдаемая разность фаз на частотах
- наблюдаемая разность фаз на частотах  реальных сейсмических сигналов, зарегистрированных приемниками с номерами k и l, и содержащаяся в измеренных значениях взаимных спектральных плотностей мощности указанных сигналов;
реальных сейсмических сигналов, зарегистрированных приемниками с номерами k и l, и содержащаяся в измеренных значениях взаимных спектральных плотностей мощности указанных сигналов;
b(ψ), b(0)=1 - настроечная функция процедуры анализа;
Q - область земной среды под поверхностной группой сейсмических приемников, в которой ищутся источники микросейсмических событий;
ΔV - заданный интервал возможных скоростей сейсмических волн от источника, при этом первая сумма в функционале Ф(r,V) вычисляется по всем парам приемников поверхностной группы сейсмических приемников, имеющим различные номера,
затем устанавливают значение аргумента r функционала Ф(r,V), в котором этот функционал достигает максимума, по которому определяют измеренное значение координат  микросейсмического источника
микросейсмического источника
2. Способ по п.1, отличающийся тем, что ожидаемые разности фаз вычисляются на основе модели однородной земной среды по формуле
 ,
,
где r=(x,y,z), x, y, z - ожидаемые координаты источника;
 , k∈1, …, M - координаты датчиков группы;
, k∈1, …, M - координаты датчиков группы;
V∈ΔV - неизвестная скорость сейсмических волн в однородной среде.
3. Способ по п.1, отличающийся тем, что ожидаемые разности фаз Δφl,k(r,fj) вычисляются по формуле
 ,
,
где T(d,z), d∈[0,R], z∈[0,Z] - семейство годографов сейсмических волн от источников в области Q возможных расположений источника, рассчитанное на основании заданной скоростной модели среды под пространственной группой сейсмоприемников;
 ,
,
xk, yk, zk - координаты k-го сейсмоприемника;
r=(x,y,z), x, y, z - ожидаемые координаты источника,
4. Способ по п.1, отличающийся тем, что ожидаемые разности фаз Δφl,k(r,fj) вычисляются по формуле

где  - измеренные функции годографов сейсмических волн от источников в области Q возможных расположений источников;
- измеренные функции годографов сейсмических волн от источников в области Q возможных расположений источников;
R - апертура поверхностной группы сейсмических приемников;
Z1, Z2 - границы глубин ожидаемых источников;
измеренные функции вычисляются на основании задержек  , k∈1, …, M, сигналов, зарегистрированных поверхностной группой сейсмических приемников от ведущих событий с известными координатами источников (xв,yв,zв)∈Q, а именно - таких событий, которые зарегистрированы поверхностной группой сейсмических приемников с большим отношением сигнал-помеха,
, k∈1, …, M, сигналов, зарегистрированных поверхностной группой сейсмических приемников от ведущих событий с известными координатами источников (xв,yв,zв)∈Q, а именно - таких событий, которые зарегистрированы поверхностной группой сейсмических приемников с большим отношением сигнал-помеха,
 ,
,
xk, yk, zk - координаты k-го сейсмоприемника;
r=(x,y,z) - ожидаемые координаты источника.
| Колосоуборка | 1923 |
|
SU2009A1 |
| ИЗОЛИРУЮЩИЙ СТЫК | 2009 |
|
RU2409722C1 |
| СПОСОБ УДАЛЕНИЯ И ВОЗВРАЩЕНИЯ В ИСХОДНОЕ ПОЛОЖЕНИЕ ТРАВЯНОГО ПОКРЫТИЯ ФУТБОЛЬНОЙ ПЛОЩАДКИ КРЫТОГО СТАДИОНА | 2009 |
|
RU2409723C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБ МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИСТОЧНИКОВ ЭМИССИИ И РАССЕЯННОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278401C1 |

