Изобретение относится к энергосберегающим технологиям и может быть использовано в машиностроении, в частности в двигателестроении для преобразования тепловой энергии в механическую энергию, и осуществляется за счет линейной тепловой деформации твердых тел.
Известны двигатели, например, так называемые тепловые, содержащие корпуса, рычаги, держатели, теплораспределительные системы и гибкие деформируемые элементы, установленные с возможностью удлинения при нагревании и укорачивания при охлаждении и соединенные, как правило, посредством механизма преобразования с выходными звеньями (например, патент RU 2032923 С1, опубликованный 10.04.1995, и патент RU 2099595 С1, опубликованный 20.12.1997).
Недостатками известных двигателей являются значительный расход топлива и сложная конструкция.
Задачей изобретения является уменьшение расхода топлива путем дальнейшего преобразования неиспользуемой тепловой энергии в механическую энергию посредством прямого периодического контакта с элементами длинных нитей и последующим преобразованием их линейных тепловых деформаций в крутящий момент.
Поставленная задача решается за счет того, что двигатель содержит неподвижный остов, рычаги, держатели, теплораспределительную систему и гибкие натянутые деформируемые элементы, закрепленные с возможностью удлинения одной части при нагревании посредством теплораспределительной системы и укорачивания при охлаждении этой системой их другой части и соединенные с кривошипно-шатунным механизмом, связанным с центральным рычагом; причем теплораспределительная система включает камеры с подводящими теплопроводами и отводящими теплопроводами, объединенными в одну камеру вокруг гибких элементов общим выходным теплопроводом с возможностью чередования потоков разной температуры через части гибких деформируемых элементов, которые расположены между рычагами, оси вращения которых параллельны.
Сущность состоит в том, что элементы проводов, нитей, подвергаемых линейной тепловой деформации соединены с рычагом, преобразующим их линейное изменение длины в качательное или вращательное движение вокруг своей оси по площади, количество которых прямо пропорционально квадрату их сторон, одна из которых направлена вдоль оси качения рычага, а вторая - поперек оси качения рычага, что увеличивает их количество до цельной нити, линейная тепловая деформация которой достаточна для преобразования ее в крутящийся момент.
Сущность состоит в том, что параллельные элементы цельной нити равной длины вторым концом соединены со вторым рычагом, ось вращения которого параллельна оси первого рычага.
Дальнейшая сущность предложения раскрывается с помощью графических изображений, где на фиг.1, 2, 3 изображен принцип поворота параллельных рычагов изменением длины звена между ними, на фиг.4, 5, 6 - поворот уравновешенных параллельных рычагов, на фиг.7, 8, 9 - схема размещения элементов по площади между рычагами с изменением плеча, на фиг.10, 11, 12 - вращение рычагов с элементами между ними вокруг параллельных осей, на фиг.13, 14, 15, 16 - пример конструкции двигателя с качающимися рычагами, на фиг. 17 - пример конструкции двигателя с вращающимися рычагами.
Фиг.1. Параллельные рычаги 1, 2 закреплены шарнирно А и В к неподвижному звену 3 и уравновешены жестким звеном 4, соединенным шарнирно С и D к рычагам 1, 2 и параллельным неподвижному звену 3.
При действии внешней силы на рычаги 1, 2 они вращаются вокруг шарниров А и В синхронно из-за звена 4 с описанием их конечных шарниров С и D равных окружностей равностью их расстояния до параллельных осей шарниров А и В.
Шарнирное в точке Е соединение к рычагам 1, 2 дополнительного звена 5, не параллельного звеньям 3 и 4, вызывает их вращение под действием внутренней силы, одинаково действующей на концы рычагов в шарнирах Е и D при изменении своей длины за счет разности плеч и создаваемом разным поворотным моментом, поворачивая синхронно рычаги 1, 2 при сокращении длины в ту сторону, когда при положении мертвой точки и выстраивании всех звеньев в одну линию разность плеч сокращает на эту величину длину дополнительного звена 5 (фиг.2), а при распирающей силе в случае использования жесткого звена 5 рычаги 1, 2 поворачиваются в ту сторону (фиг.3) за счет разности поворотных моментов при одной и той же действующей силе, когда разность плеч при выстраивании всех звеньев в одну линию увеличивает на эту величину звено 5.
Фиг.4. Замена одноплечих рычагов 1, 2 на двуплечие позволяет не использовать синхронизирующее жесткое звено 4 с возможностью уравновешивания рычагов 1, 2 непараллельными гибкими элементами 5 относительно неподвижного звена 3 и параллельными между собой по обеим сторонам от осей А и В поворота, причем величины плеч рычагов 1, 2 меняются на противоположные, и при одинаковом сокращении звеньев 5 (фиг.5) рычаги 1, 2 синхронно поворачиваются в сторону сокращения длины звеньев 5, а при обратном движении рычагов 1, 2 длина звеньев 5 (фиг.6) должна увеличиваться в длине и не препятствовать увеличению расстояния между шарнирами D и Е.
Фиг.7. Шарнирное соединение гибких элементов 5 длинной нити, параллельных между собой и непараллельных неподвижному звену 3, или прямой, соединяющей оси А и В вращения рычагов 1, 2, к ним при тепловом сокращении длины элементов 5 вызывает синхронный поворот рычагов 1, 2 в сторону уменьшения длины между шарнирами Е и D. При увеличении тепловой деформации элементами 5 и соединении одного из рычагов 1 или 2 с кривошипно-шатунным механизмом 6, преобразующим их возвратно-качающееся движение в крутящийся момент, плечо В-Е изменяется с помощью кулисы или ползунов 7, причем с одной стороны рычага 2 плечо увеличивается, а с другой - уменьшается с созданием одинакового поворотного момента всеми элементами 5 по обе стороны от параллельных осей А и В обоими рычагами 1 и 2.
При значительном превышении плеча В-Е относительно линейного теплового изменения длины элементов 5 они могут изгибаться и не передавать движение параллельному рычагу 1 или 2 с последующим резким ускорением, поэтому возможно введение синхронизирующего звена между рычагами 1, 2, параллельного неподвижному звену 4 или 3, или прямой А-В.
Смещение рычага 2 относительно оси поворота В с помощью кулисы или ползуна 6 позволяет устанавливать параллельные элементы 5 параллельно неподвижному звену 3, или прямой А-В (фиг.8), при которой отсутствует разность плеч с образованием равных моментов каждым элементом 5 при их тепловой деформации относительно обоих рычагов 5, приводящей к изгибу рычагов 1, 2, но не их повороту.
Установка гибких элементов 5 по площади (фиг.9, вид сверху) возможна через дополнительные оси 8, устанавливаемые на рычагах 1 и 2 одной оси А и В с вращением вместе с ними или меняющимся изгибом вокруг них.
Смещение рычагов 1, 2 (фиг.10) относительно друг друга вдоль своих параллельных осей А и В вместе с ними так, чтобы между ними оставалось свободное пространство, которое заполняют элементы 5 длинных нитей, позволяет им совершать полное вращение вокруг своих осей А и В с образованием тел вращения, причем при равной удаленности закрепленных концов каждого элемента 5 от оси поворота, где А-D=В-С, соответствующего рычага 1 или 2 они совершают вращение вместе с рычагами 1 и 2 под действием внешней силы без создания крутящего момента, оставаясь параллельными между собой при любом угле поворота рычагов 1 и 2, и все элементы 5 при вращении расположены под одним и тем же углом к параллельным осям А или В.
На фиг.11, 12 смещение одного рычага 2 (или 1) относительно своей оси В (или А) поворота, или закрепление концов параллельных элементов 5 к рычагу 2 (или 1), плечо В-Е которых не совпадает с креплением вторых концов А-Д ко второму рычагу 1 (или 2), при линейной тепловой деформации элементов 5 вызывает крутящийся момент одного рычага 2 (или 1) с вращением второго 1 (или 2) за счет его соединения с первым 2 (или 1) элементами 5.
Крутящийся момент возникает из-за сокращения или удлинения длины между креплениями параллельных элементов 5 между рычагами, которые при полуобороте рычагов удлиняются или сокращаются на величину разницы плеч, при этом максимальный угол элемента 5 к рычагу 1 или 2 может составлять прямой угол как наименьшее расстояние между ними.
Угол расположения элементов 5 при их вращении к осям вращения рычагов 1 и 2 будет постоянно меняться с переходом в мертвых точках, соответствующих максимальному и минимальному расстоянию между их точками креплений к рычагам 1 и 2.
При соосном расположении осей А и В рычагов 1 и 2 поворотного момента не возникает при любой разнице в плечах креплений элементов 5 из-за отсутствия параллельного смещения осей и влияния его на удаление или приближение мест креплений элементов 5 к рычагам 1, 2 при их синхронном повороте.
На фиг.13 - вид сбоку с ДВС (двигателем внутреннего сгорания), на фиг.14 - вид сверху с газораспределением от ДВС, на фиг.15 - вид спереди с сечением, на фиг.16 - вид со стороны шатуна, в прямоугольных проекциях изображена схема двигателя, реализующего описанный способ преобразования тепловой энергии в механическую.
Двигатель состоит из тех же описанных основных деталей и узлов: неподвижного звена, или корпуса 3, двух параллельных валов 9, 10 параллельных осей А и В, двух пар параллельных рычагов 1 и 2 с гибкими элементами 5 между ними, кривошипно-шатунного механизма 6, управляемых ползунов 7 и теплогазораспределительных устройств, выполненных на базе двигателя внутреннего сгорания 11 и крыльчатого насоса 12.
Верхний ведущий вал 10 установлен в корпусе 3 и проходит через три его отсека 13, 14 и 15, в первом 13 из которых он соединен эксцентриком 16 увеличенного плеча с эксцентриком 17 выходного вала 18 через шатун 19 и рычагом 20 крыльчатого насоса 12, во втором 14 и третьем 15 отсеке вал 10 жестко соединен с рычагами 2, выполненными в виде направляющих для ползунов 7, к которым шарнирно закреплены кронштейны 21, отверстия которых через натяжное устройство, выполненное в виде болта 22 и гайки 23, удерживают верхнюю рамку 24 с закрепленными к ней шарнирно через держатели 8 гибкими элементами 5, которые вторыми концами закреплены так же через держатели 8 на рычаге 1, выполненном в виде рамки и установленном на нижнем валу 9, выполненных как одно целое, причем держатели 8 установлены в рычаге 1 шарнирно и с возможностью бокового смещения под действием пружин 25. Между ползуном 7 и валом 10 находятся гидроцилиндры 26, связанные с управляющим гидроцилиндром 27. Выходной вал 18 соединен с коленчатым валом 28 двигателя внутреннего сгорания 11, выхлопные каналы 29 которого соединены с впускными каналами 30 корпуса 3 согласно порядку работы цилиндров 31, а выпускные каналы 32 крыльчатого насоса 12 соединены со своими впускными каналами 33 корпуса 3, при этом отсеки 14 и 15 герметизированы так, чтобы чередующие газы от ДВС 11 и крыльчатого насоса 12 проходили только сквозь элементы 5 и выходили из корпуса 3 через общее выходное отверстие 34.
Двигатель преобразует тепловую энергию выхлопных газов ДВС 11 в механическое вращение выходного вала 18 следующим образом.
Рабочий такт совершается за каждый полуоборот коленчатого вала 29 и выходного вала 18 с совершением качения рычагов 1 и 2 в одну сторону, при этом элементы 5 натянуты через натяжное устройство 22 и 23, а управляющий и исполнительные цилиндры создают рабочую геометрию, при которой параллельные элементы 5 через держатели 8 имеют разные плечи до осей А и В вращения соответствующих рычагов 1 и 2.
Выхлопные газы первого цилиндра 31 ДВС 11 очередного такта через каналы 29 и 30 поступают в отсек 14, рычаги 1, 2 которого совершают синхронное вращение в одну сторону вместе с валами 9, 10, на которых они установлены с увеличением расстояния между держателями 8, увеличивать которое не препятствуют элементы 5, закрепленные на них из-за их линейной тепловой деформации выхлопных газов повышенной температуры, от которой они удлиняются, а во второй отсек 15 поступает от крыльчатого насоса 12 охлаждающий воздух, который проходит сквозь элементы 5 и охлаждает их, ранее нагретые от выхлопных газов и имеющие обратную геометрию по отношению к элементам 5 отсека 14, при которой тот же синхронный поворот рычагов 1 и 2 уменьшает расстояние между держателями 8, которые под действием стягивающей силы линейной тепловой деформации поворачивают рычаги 1, 2 с совершением полезной работы.
При приближении к мертвой точке параллельные элементы 5 сближаются между с собой с вытеснением газа из отсеков 14, 15 прошедших процессов и после прохождения ее начинается новый такт с увеличением пространства между элементами 5 с движением рычагов 1, 2 в обратную сторону.
Выхлопные газы второго цилиндра 31 ДВС 11 поступают в отсек 15, под действием которых элементы 5 нагреваются и вытягиваются, и не препятствуют увеличению расстояния между соответствующими держателями 8 параллельных рычагов 1, 2. В этот же период в отсек 14 поступает холодный воздух от крыльчатого насоса 12, который проходит сквозь элементы 5, ранее нагретые предыдущим тактом выхлопными газами соответствующего цилиндра 31, и охлаждает их с созданием стягивающей силы тепловой деформации, под действием которой рычаги 1, 2 поворачиваются в сторону уменьшения расстояния между держателями 8, закрепленными на них с совершением полезной работы.
При приближении и проходе мертвой точки между элементами 5 уменьшается расстояние с вытеснением газов прошедших процессов с завершением двухтактного цикла и с последующим повторением описанных тактов, но с питанием выхлопных газов уже со следующего цилиндра 31 из-за четырехтактного режима работы ДВС 11.
Практически в процессе линейной тепловой деформации ряды элементов 5 нагреваются и охлаждаются неравномерно с соответствующим неодинаковым изменением длины, и для коррекции неравномерности вводится пружина 25, которая поддерживает элементы 5 в натянутом состоянии.
С увеличением мощности ДВС 11 возрастает температура выхлопных газов с повышением тепловой деформации элементами 5, и для более полного преобразования тепловой энергии двигателем с помощью гидроцилиндров 26 и 27 увеличиваются плечи элементов 5 с увеличением рабочего хода ими при охлаждении от крыльчатого насоса 12.
При преобразовании тепловой энергии от других источников, или после турбины, когда нет их разделения по тактам, возможно использование принципа работы ДВС 11 в качестве газораспределительного устройства или в виде управляемых заслонок, перекрывающих или открывающих впускные каналы 30 корпуса 3 в зависимости от протекающих процессов в отсеках 14 и 15.
Фиг.17. Преобразователь тепловой энергии в механическую с вращающимися рычагами на параллельных осях с образованием тел вращения без газораспределительного устройства состоит из цилиндрического корпуса 3 с диаметрально противоположными входными отверстиями 35 для непрерывного прохода горячего и холодного газа внутрь, на торце которого с одной стороны установлен выходной вал 18 с рычагами 1, к которому закреплены кольцевые держатели 8, а с другой торцевой стороны установлен через резьбовое соединение полый вал 36 с натяжным рычагом 37, на другом конце которого внутри корпуса 3 установлены рычаги 2 с кольцевыми держателями 8 с возможностью качения по нему, причем оси вращения первого рычага 1 и выходного вала 18 и оси вращения рычагов 2 неподвижного полого вала 36 параллельны и не лежат на одной прямой. Кольцевые держатели 8 рычагов 1 и 2 имеют разный диаметр, между которыми натянуты элементы 5, причем концы каждого элемента 5 имеют разные плечи до осей А и В вращения соответствующих рычагов 1 или 2.
Горячий газ и охлаждающий воздух поступает через входные отверстия 35 непрерывно, проходит сквозь элементы 5 и удаляется через центральное отверстие вала 36. При ненатянутом состоянии элементов 5 двигатель не работает. Поворот натяжного рычага 37 смещает полый вал 36 относительно корпуса 3 вдоль оси В и натягивает элементы 5 до состояния струны. Газы повышенной температуры нагревают элементы 5 в момент их увеличения длины как от тепловой линейной деформации, так и от положения рычагов 1 и 2 с параллельными осями А и В и с разностью плеч их соединений с кольцевыми держателями 8, чем обеспечивается их несопротивление вращению рычагов 1, 2 и выходного вала 18, которое происходит под действием стягивающих сил линейной тепловой деформацией элементов 5, когда они при дальнейшем вращении попадают в зону действия охлаждаемого воздуха с стремлением переместиться в зону наименьшего расстояния между рычагами 1, 2 и соответствующих держателей 8, которое происходит при полуобороте рычагов 1, 2 и выходного вала 18 с совершением полезной работы, и при дальнейшем вращении элементов 5 вокруг параллельных осей А и В они попадают в зону повышенной температуры от горячих газов, нагреваются и удлиняются, чем не препятствуют дальнейшему повороту рычагов 1, 2, которое происходит под действием очередных вращающихся элементов 5, попадающих в зону охлаждения с сокращением своей длины и совершения полезной работы.
Для предотвращения колебаний между рычагами 1, 2, происходящих при смене нагрузки, оборотов и т.д., колебаниях их между элементами 5, возможно введение синхронизирующих валов параллельно осям А и В.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ | 2009 |
|
RU2386858C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО ТЕПЛООБМЕНА С ПРЕОБРАЗОВАНИЕМ ТЕПЛОВОЙ ЭНЕРГИИ ГАЗОВ В МЕХАНИЧЕСКОЕ ДАВЛЕНИЕ ГАЗОВ | 2000 |
|
RU2184259C2 |
| ЛЕНТО-ТРУБНЫЙ СПОСОБ ТУШЕНИЯ ЛЕСНОГО ПОЖАРА С ПРЕОБРАЗУЮЩИМИ СЪЕМНЫМИ ЗВЕНЬЯМИ | 2011 |
|
RU2470685C2 |
| СПОСОБ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА | 2012 |
|
RU2514010C1 |
| ТУРБОВИНТОВАЯ СИЛОВАЯ УСТАНОВКА РАЗНЕСЕННОЙ ВИНТОВОЙ СХЕМЫ С ПЕРЕКЛЮЧАЮЩИМИ РЕАКТИВНЫМИ И ВИНТОВЫМИ ТИПАМИ ТЯГ ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2529737C1 |
| СПОСОБ ПЕРЕХОДА ТРАНСПОРТНЫХ СРЕДСТВ С КОЛЕСНОГО ХОДА НА КОЛЕСНО-СЦЕПНОЙ И ОБРАТНО И УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖИТЕЛЕЙ | 2012 |
|
RU2500566C2 |
| ЖЕЛЕЗНАЯ ДОРОГА | 2007 |
|
RU2354771C2 |
| ДВИГАТЕЛЬ | 1997 |
|
RU2169849C2 |
| УСТРОЙСТВО УГЛОВОГО УПЛОТНЕНИЯ | 1995 |
|
RU2119562C1 |
| РЕЛЬСОВАЯ КОЛЕЯ ЖЕЛЕЗНОЙ ДОРОГИ | 2000 |
|
RU2264494C2 |
Двигатель может быть использован в двигателестроении. Двигатель содержит неподвижный остов, рычаги, держатели, теплораспределительную систему и гибкие натянутые деформируемые элементы, закрепленные с возможностью удлинения одной части при нагревании посредством теплораспределительной системы и укорачивания при охлаждении этой системой их другой части и соединенные с кривошипно-шатунным механизмом, связанным с центральным рычагом; причем теплораспределительная система включает камеры с подводящими теплопроводами и отводящими теплопроводами, объединенными в одну камеру вокруг гибких элементов общим выходным теплопроводом с возможностью чередования потоков разной температуры через части гибких деформируемых элементов, которые расположены между рычагами, оси вращения которых параллельны. Изобретение обеспечивает уменьшение расхода топлива. 17 ил.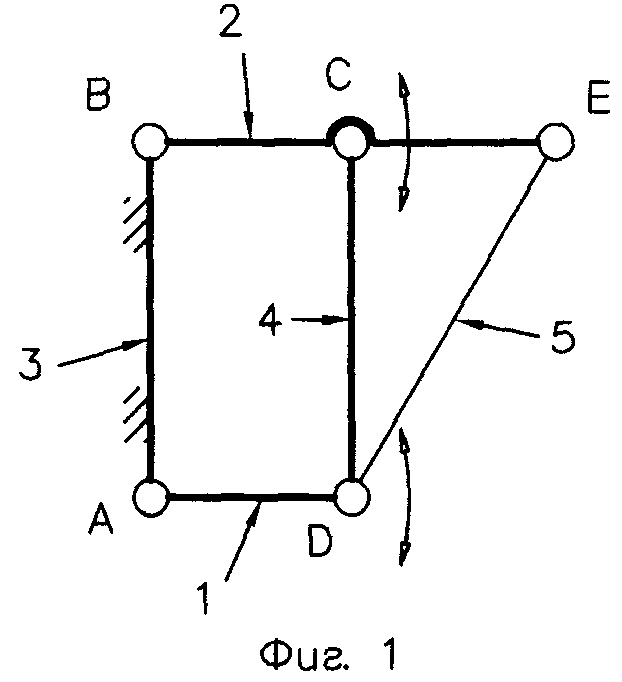
Двигатель, содержащий неподвижный остов, рычаги, держатели, теплораспределительную систему и гибкие натянутые деформируемые элементы, закрепленные с возможностью удлинения одной части при нагревании посредством теплораспределительной системы и укорачивания при охлаждении этой системой их другой части и соединенные с кривошипом кривошипно-шатунного механизма, связанного с центральным рычагом, причем теплораспределительная система включает камеры с подводящими теплопроводами и отводящими теплопроводами, объединенными в одну камеру вокруг гибких элементов общим выходным теплопроводом с возможностью чередования потоков разной температуры через части гибких деформируемых элементов, которые расположены между рычагами, оси вращения которых параллельны.
| ТЕРМОБИМЕТАЛЛИЧЕСКИЙ ПРИВОД Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2032923C1 |
| ТЕПЛОДВИГАТЕЛЬ (ВАРИАНТЫ) И ТЕРМОЭЛЕМЕНТ | 1996 |
|
RU2099595C1 |
| ТЕПЛОДВИГАТЕЛЬ | 1998 |
|
RU2194188C2 |
| ТЕРМОБИМЕТАЛЛИЧЕСКИЙ ПРИВОД Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2032835C1 |

