Для кратковременного повышения проходимости автомобилей в период гололеда, выпадения осадков в виде дождя или снега, преодоления обводненных участков грунтовых дорог, пахоты требуется увеличение проходимости в этот момент с изменением сцепных качеств колеса с опорной поверхностью.
Для этих целей из-за отсутствия шин с изменяемым протектором существуют различные их виды с постоянным рисунком протектора, выполненные для контакта с определенным состоянием опорной поверхности дороги, неэффективные при качении в других условиях, что приводит к увеличению их числа с необходимостью их замены, например в переходный летне-зимний период, где большая часть времени шины используются в условиях неэффективного качения.
Также для кратковременного повышения проходимости автомобилей существуют различные приспособления в виде замкнутых цепей, колец, секторов протектора и других съемных элементов, закрепляемых на внешней окружности колесах путем наезда колеса вдоль разомкнутой и расправленной цепи с последующим обхватом колеса с натягом и замыкания цепи, причем цепи, охватывающие одновременно два колеса трехосного автомобиля преобразуют его колесный движитель в гусеничный, но их разрушительное действие на шины и дорожное покрытие после преодоления препятствий снижает качество качения и не допускает длительной эксплуатации, а при частом ручном соединении и разъединении цепей с колесом, причем совмещения предварительного, т.к. установка приспособлений на колеса уже застрявшего автомобиля крайне затруднительна, не способствует широкому распространению этих устройств [1].
Наличие дополнительного гусеничного движителя, параллельно или последовательно приставленного к колесу транспортного средства для увеличения проходимости путем их попеременного использования, утяжеляет и усложняет конструкцию, изменяет опорную площадь с потерей устойчивости, что приводит к неэкономичной и неэффективной эксплуатации автомобиля или другого колесного транспортного средства [2].
Известны транспортные средства, оборудованные гусеничным движителем с ведущими опорными катками, которые после размыкания и снятия гусеницы используются как колеса автомобиля [2].
Преобразование гусеничного движителя в колесный и наоборот, совмещение колес с гусеницей происходит аналогично установке и снятию цепи на колесо автомобиля с предварительной остановкой транспортного средства и заезда-съезда на развернутую гусеницу с последующей операцией смыкания-размыкания, где ручные операции по демонтажу с последующей установкой гусеницы также долговременны и трудоемки, что является препятствием для применения.
Известны автоматические цепи противоскольжения ONSPOT, дистанционно приводимые в действие после поворота корпуса с закрепленными на нем цепями до контакта с колесом и раскручивания цепей с последующим заходом их в зону контакта между колесом и дорогой, промежуточное положение которых увеличивают продольные силы колеса и повышают поперечную устойчивость автомобиля [3].
Вращение цепей в плоскости, параллельной дороге на уровне зоны контакта, ограничивает их применение, возможное на ровной дороге, например, для движения в условиях гололеда, но в условиях образования колеи на слабо несущей поверхности их попадание в зону контакта проблематично или невозможно, при этом необходимость в центробежной силе для раскручивания цепей при согласованной скорости с движущейся зоной контакта или автомобилем также сужает антигололедные возможности автомобиля в начальный и завершающий момент движения.
Задачей изобретения является автоматическое безостановочное преобразование колесного движителя в гусенично-сцепной и обратно.
Поставленная задача решается путем дополнительной параллельной установки к колесу транспортного средства двух направляющих колес с гибким обводом между ними, известных из техники как ременная или цепная передача, транспортерная лента и т.п., с механизмами их натяжения с возможностью смещения колес между собой как продольного, используемого при натяжении обвода, так и поперечного осевого, используемого, в частности, при центровке ленты при первоначальном монтаже колес на оси.
Сущность состоит в том, что путем поперечного смещения направляющих колес с обводом создается предварительный перекос одной из двух частей обвода к плоскости вращения колеса, приводящий после диагонального взаимодействия к совмещению или разделению их плоскостей вращения с возможностью промежуточной корректировки при слиянии в зависимости от положения направляющих колес и угла обвода к колесу автомобиля.
Лучшим вариантом смещения направляющих колес является шарнирное нецентральное соединение их осей с осью колеса автомобиля, что не исключает их поочередного осевого смещения с возможностью корректировки плоскости вращения между ними с тем же общим результатом перекоса одной части межколесного обвода относительно колеса автомобиля.
Перекос части обвода, создаваемый направляющими колесами с перекрытием зоны вращения колеса при угловом взаимодействии, отличном от нуля и прямого угла с колесом автомобиля, дает возможность одностороннего ввода части обвода в зону контакта между колесом и опорной поверхностью силами трения или зацепления, где сопротивление этого ввода зависит от угла взаимодействия и силы натяжного механизма, а вторая часть обвода не противодействует взаимодействую другой части с колесом, находясь вне зоны его деятельности.
При диагональном поступлении обвода в зону контакта происходит заезд колеса на него с пересечением плоскостей вращения колеса и гибкого обвода под небольшим углом с незначительным расхождением их плоскостей вращения с возможностью их последующего совмещения, что недостижимо при параллельном приближении обвода к колесу, работающий как боковой ограничитель с двухсторонним вовлечением в процесс вращения колеса и с поперечным переездом без возможности предварительной корректировки обвода, когда плоскости вращения перпендикулярны, что определяет мгновенность перехода колесного хода на колесно-сцепной максимально за пол-оборота колеса с момента начала взаимодействия в отличие от ручной установки цепного обвода колеса автомобиля.
После зажима обвода в зоне контакта переднее направляющее колесо по ходу движения обратным смещением устанавливается в плоскости качения колеса, что дает возможность дальнейшего качения по нему колеса с полным линейным совмещением плоскостей, как это происходит в гусеничных движителях при качении опорных катков по гусенице, и обеспечивает ввод обвода в зону контакта вместе с протектором по ходу движения, а не с перпендикулярной боковой стороны, как в системе ONSPOT VBG.
Корректировка положения относительно положения обвода в зоне контакта при возникающем уводе осуществляется соответствующим смещением переднего направляющего колеса с диагональным поворотом обвода до линейного совмещения с плоскостью качения ведущего направляющего колеса, что дает возможность устойчивого движения на поворотах, где для сравнения такую роль в гусеничном движителе для опорных катков выполнят боковые ограничители, установленные на внутренней стороне гусениц.
Для изменения сцепных качеств в зоне контакта достаточно возвратно-поступательных движений одного ведущего направляющего колеса с зигзагообразным продольно-поперечным укладыванием обвода в зоне контакта, причем амплитуда и частота этих движений, а также частота вращения колеса автомобиля определяют рисунок контактных образованных поверхностей, тогда как рисунок цепей, закрепляемых на колесе автомобиля, постоянен, а необходимость в увеличенной длине нижней части обвода компенсируется другой частью путем их перераспределения между колесами в пределах хода натяжного механизма.
При необходимости движения на колесном ходу смещением направляющего колеса до исходного создается нелинейный диагональный перекос положения обвода от зоны контакта с последующим съездом колеса с него и мгновенным разъединением плоскостей вращения, при котором обвод из-за отсутствия взаимодействия с опорной поверхностью останавливается и переходит в первоначальное резервное положение под действием натяжного механизма, что несоизмеримо проще, чем ручное снятие цепи или гусениц с колес.
Положение второго замыкающего ведомого колеса обвода несущественно для перехода с одного режима качения на другой и самоустанавливается свободно механизмом натяжения и боковыми ограничителями для предотвращения сброса обвода с колес.
Корректировка положения гибкой связи обвода в зоне контакта с последующей ее стабилизацией возможна при ее гибкости как в продольной плоскости качения, так и в поперечной, в чем состоит отличие от гусеничного движителя, где гусеничный обвод, в котором траки соединены между собой шарнирно с гибкостью в продольной плоскости движения с внутренними ограничителями для опорных колес, исключающими переходные и корректирующие процессы в совмещенном варианте.
Движение автомобиля на колесном ходу осуществляется без взаимодействия колеса и обвода, где часть обвода, ограниченная размерами колес и способом укладки ненатянутого обвода, не соприкасается с опорной поверхностью дороги путем выборки провисания обеих частей механизмами натяжения или другими механизмами, тогда как длина цепей механизма ONSPOT VBG в нерабочем положении ограничена дорожным просветом автомобиля, соизмеримой с шириной одного колеса, что в случае применения на спаренных колесах снижает проходимость автомобиля, тогда как в предлагаемом случае охватываемая зона контакта зависит от величины хода механизма натяжения и его конструкции, которую можно совершенствовать в отличие от ограниченной постоянной величины дорожного просвета.
При необходимости преодоления сложных участков дороги, определяемых по факту в процессе движения автомобиля дистанционно, создается перекос контактирующей части обвода со взаимодействием с колесом и автоматическим вводом цепи или других гибких элементов противоскольжения в зону контакта с плоскости качения колеса, а после выезда на нормальную дорогу перекос обратным действием поворотного механизма устраняется с выводом цепи из зоны контакта вращающимся колесом, т.е. без остановки автомобиля, что возможно при использовании цепей ONSPOT VBG исключительно на ровной дороге в условиях гололеда без снижения скорости до предела, при которой становится недостаточно центробежной силы для раскручивания цепей с остановкой автомобиля или его неуправляемого движения, тогда как в предлагаемом варианте замкнутая цепь или обвод вводится в зону контакта и выводится максимально за полоборота колеса при любой частоте его вращения и без учета глубины колеи.
Цепи противоскольжения, фиксирующиеся на колесах, требуют предварительной остановки автомобиля перед предполагаемым труднопроходимым участком, т.к. после застревания их сложно и невозможно надеть, трудоемкую ручную операцию с обратной последовательностью работ после преодоления сложных участков дороги, при этом цепи могут вообще не пригодиться или использоваться на хороших участках дороги, что приводит к повышенному износу или повреждению шин и к снижению скорости движения в отличие от мгновенного ввода и вывода цепей дистанционным управлением их перекосом, исключающее нерентабельное применение цепей.
Рисунок постоянных цепей и протектора используемых шин является величиной постоянной, на отдельных участках дороги может являться излишним или недостаточным, тогда как в предлагаемом варианте рисунок на протекторе в зоне контакта создается путем изменения величины перекоса от прямолинейного до криволинейного с заданной частотой и с возможностью перекрытия ширины колеи, что оптимизирует тяговые продольные и поперечные свойства колеса с возможностью использования одних и тех же шин одного типа и одного типа гибкого элемента, в частности замкнутого каната, при движении в различных погодных условиях как во время дождя по твердой поверхности прямолинейным вводом гибкого обвода в зону контакта во избежание аквапланирования и зигзагообразного во избежание пробуксовки, что дает возможность использовать более экономичные колеса, причем одного типа со сплошным протектором на все случаи, а для специального повышения проходимости использовать набор сменных замкнутых гибких обводов с различными свойствами противоскольжения, например круглого сечения для преимущественно высокоскоростного движения, прямоугольного для преодоления слабонесущей поверхности и т.д., хранение и замена которых не вызывает сложности в отличие от запаса колес различного назначения.
Для предотвращения начального ударного взаимодействия вращающего колеса с неподвижным обводом, выводящимся из резерва, возможно его предварительное раскручивание установкой привода на направляющие колеса аналогично подобным конструкциям, устанавливаемым на шасси самолетов, но ненашедшим там применения, т.к. проще и надежнее раскручивать контактным способом.
Дальнейшая сущность предложения раскрывается с помощью графических изображений, где на фиг.1, 2, 3, 4, 5, 6 в прямоугольных проекциях изображена принципиальная схема движения автомобиля на колесном и колесно-сцепном ходу, на фиг.7, 8, 9, 10, 11, 12 - вариант преобразования колесного движителя в гусеничный, на фиг.13, 14, 15, 16, 17, 18 - вариант применения цепей с внутренним малогабаритным расположением, фиг.19, 20, 21, 22, 23, 24 - преимущественная эксплуатация колесно-сцепного хода, фиг.25, 26, 27 - накладной вариант, фиг.28 - изометрия.
Оси 1 и 2 направляющих колес 3 и 4 соединены между собой рамой 5 или другим подобными соединительными звеньями, имеющими натяжной механизм 6, которые через жесткое звено или связь 7 соединены с осью 8 колеса 9 автомобиля шарнирно, ось 10 которого отдалена от оси 8 колеса 9 с возможностью неравнозначного смещения направляющих колес 3 и 4 с поворотом их в горизонтальной плоскости поворотным механизмом 11 и взаимодействия с колесом 9 автомобиля только нижней частью гибкого обвода 12, расположенного между направляющими колесами 3 и 4.
При колесном движении автомобиля гибкий обвод 12 зафиксирован параллельно колесу 9 автомобиля без взаимодействия с ним и опорной поверхностью 13 (фиг.1, 2, 3) минимальным выдвижением поворотного механизма 11 с максимальным выдвижением натяжного механизма 6.
В случае возникновения необходимости в повышении сцепных качеств колеса 9 (фиг.4, 5, 6) механизм поворота 11 поворачивает раму 5 с обеими осями 1, 2 направляющих колес 3 и 4, где направляющее колесо 3 с большим плечом поворота заходит за противоположную сторону колеса 9, а ось 2 второго направляющего колеса 4 из-за меньшего плеча поворота остается в прежнем положении относительно колеса 9 с диагональным пересечением соответствующей частью обвода 12 колеса 9 автомобиля и вводом его в зону контакта, при этом одна контактирующая часть обвода 12 удлиняется со сближением колес 3, 4 между собой сжатием механизма натяжения 6 с возвратом обвода 12 после съезда с него колеса 9 автомобиля по криволинейной траектории за счет направляющих реборд колеса 4, являющегося ведомым по отношению к первому ведущему направляющему колесу 3.
После диагонального наезда колеса 9 на гибкий обвод 12 производится обратный поворот рамы 5 поворотным механизмом 11 до принятия нижней частью обвода 12 плоскости вращения колеса 9, что обеспечивает дополнительную гибкость обвода 12, или цепи, ремня, ленты в поперечной плоскости с прямолинейным расположением обвода 12 в зоне контакта или совершаются колебательные возвратно-поступательные движения вокруг вертикального центра поворота 10 для корректировки или криволинейного укладывания контактирующей части обвода 12 в зоне контакта в зависимости от конкретных дорожных условий с последующим возвратом обвода 12 через ведомое направляющее колесо 4, которое из-за близости оси 10 поворота рамы 5 совершает меньшие движения, чем переднее направляющее колесо 3, а для уверенного входа в работу при отсутствии возможности бокового зацепления об выступы протектора колеса 9 достаточно увеличить диаметр первого направляющего колеса 3 или изменить его по горизонтали с целью нахождения нижней части обвода 12 ниже оси 8 колеса 9 автомобиля, для чего необходимо применение шарнира с возможностью дополнительного поворота в вертикальной плоскости, или проще крестовину, при этом неконтактирующая верхняя часть обвода 12 в случае взаимодействия с колесом 9 автомобиля из-за отсутствия зоны зажима практически не будет влиять на процесс движения.
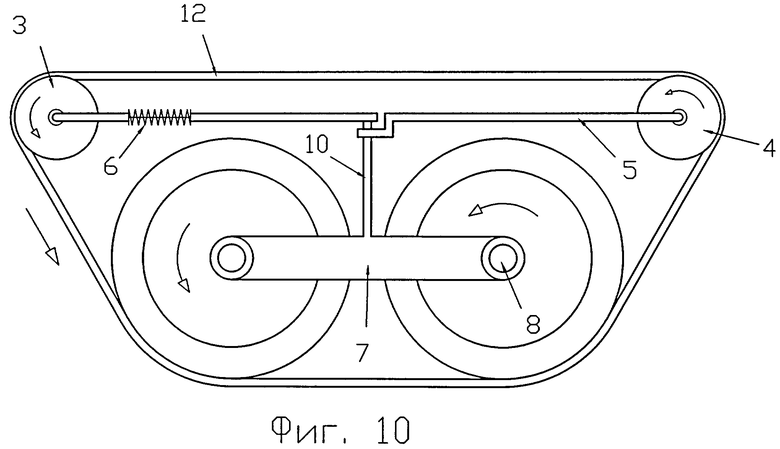
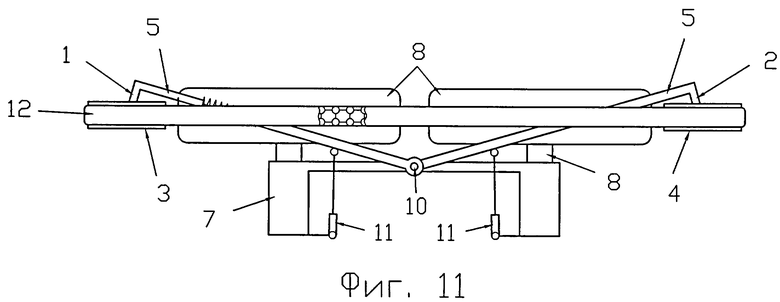
В данном примере описана конструкция для движения на колесно-сцепном ходе в одном направлении, а в следующем и для движения задним ходом с преобразованием двух последовательно установленных колес, в частности задних колес трехосного автомобиля в колесно-сцепной движитель, где на фиг.7, 8, 9 изображен колесный ход, а на фиг.10, 11, 12 - колесно-сцепной.
Отличие от предыдущего варианта состоит в шарнирно-сдвоенной удлиненной раме 5 направляющих колес 3 и 4, соединенных с ними по краям осями 1 и 2 с возможностью их поперечного поворота, например с помощью сферических подшипников, дорожка которых соответствует ширине замкнутой ленты обвода 12, объединяющая их и которая в отличие от траковой гусеничной обладает дополнительной гибкостью как транспортерная лента в поперечной плоскости, при этом замкнутая лента обвода 12 не имеет внутренних ограничителей для опорных колес 9 транспортного средства, но внутренняя поверхность может отличаться от внешней как поверхности разных целей - внутренняя для взаимодействия с колесами 9 автомобиля и направляющими колесами 3 и 4, внешняя с - опорной поверхностью дороги 13.
Переход колесного хода на гусенично-сцепной осуществляется поворотом передней части рамы 5 по ходу движения со смещением направляющего колеса 3 за колесо 9 с поперечным взаимодействием и вводом гибкого обвода 12 в зону контакта переднего колеса 9 автомобиля с опорной поверхностью 13, при этом для повышения качества переходного процесса в этот момент второе направляющее колесо 4 может совершить движение в противоположном направлении от первого 3, с последующим диагональным наездом на часть обвода 12, после которого производится корректировка положения передним направляющим колесом 3 поворотом рамы 5, при этом происходит самоцентровка оси вращения направляющего колеса 3 к повернутой оси 1 сферическими подшипниками с выравниванием гибкой ленты обвода 12 по плоскости вращения колеса 9 автомобиля, а после наезда второго колеса 9 на диагонально расположенную ленту 12 окончательная корректировка положения ленты обвода 12 второй частью рамы 5 ее свободным поворотом от бокового действия ведомого колеса 4 и с дальнейшей возможной корректировкой ленты ими в процессе движения, а для движения задним ходом меняются назначения направляющих колес 3 и 4 с ведущего на ведомое с тем же порядком перехода, осуществляемого максимально за пол-оборота колеса 9 автомобиля без его остановки и применения ручного труда.
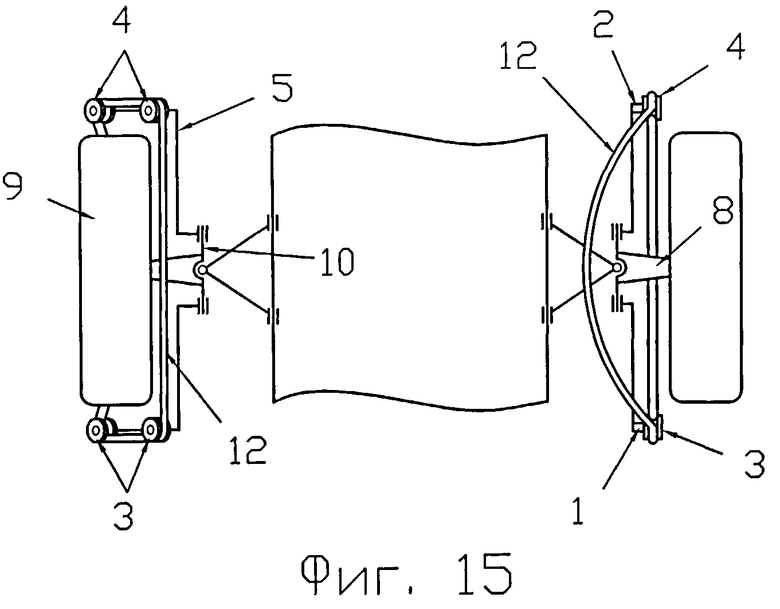
Следующий вариант применения устройства с внутренней малогабаритной установкой межколесного обвода с внутренней стороны колеса автомобиля (фиг.13, 14, 15).
Отличительным моментом от предыдущих вариантов является поперечный поворот гибкого обвода 12 и раздвоение направляющих колес 3 и 4 с разделением потока обвода на четыре части с целью уменьшения размеров, но с увеличением частоты оборотов колес 3 и 4 с большим изгибом обвода 12.
На колесном ходу гибкий обвод 12, образующий четырехугольную форму огибом вокруг четырех направляющих колес расположен параллельно колесу 9 и не взаимодействует с ним и дорогой 13.
Мгновенный по сравнению с ручным переход на колесно-сцепной режим качения осуществляется продольным поворотом передней рамы 5 с поперечным движением по окружности раздвоенных направляющих колес 3 с созданием пересеченной зоны колеса 9 автомобиля и гибкого обвода 12 с последующим его входом в зону контакта и диагональным их соединением, переходящий в совместный соответствующей корректировкой передних направляющих колес 3 поворотом рамы 5, обратный поворот которых создает противоположный перекос гибкого обвода с колесом с диагональным переходом на колесный режим качения аналогично предыдущим вариантам.
При движении одной стороны автомобиля по скользкой дороге, например в зимний период по обочине, а второй - по открытой по асфальту, существует возможность выравнивания горизонтальных сил колеса в зоне контакта возможности мгновенного подключения цепи 12 в процесс движения каждого колеса в отдельности, осуществляемой максимально за пол-оборота колеса 9, что показано на фиг.14, 15, при этом переход с колесного хода на колесно-сцепной может осуществляться автоматически, например от антиблокировочной или антипробуксовочной системы автомобиля.
На фиг.16, 17, 18 предыдущий вариант без раздвоения направляющих колес 3 и 4, диаметр которых не меньше ширины колес 8, для обеспечения работоспособности устройства, определяемой степенью перекрытия гибким обводом 12 зоны вращения колеса 8, где на эту же величину должно быть свободное пространств по обе стороны от колеса 8, что удлиняет колесные арки с изменением общего вида автомобиля, но возможность быстрого перехода с колесного хода на гусеничный оправдывает эти изменения, причем эти изменения будут незначительные, если применить раздвоение направляющих колес или использовать направляющие, основанные на скольжении обвода по ним.
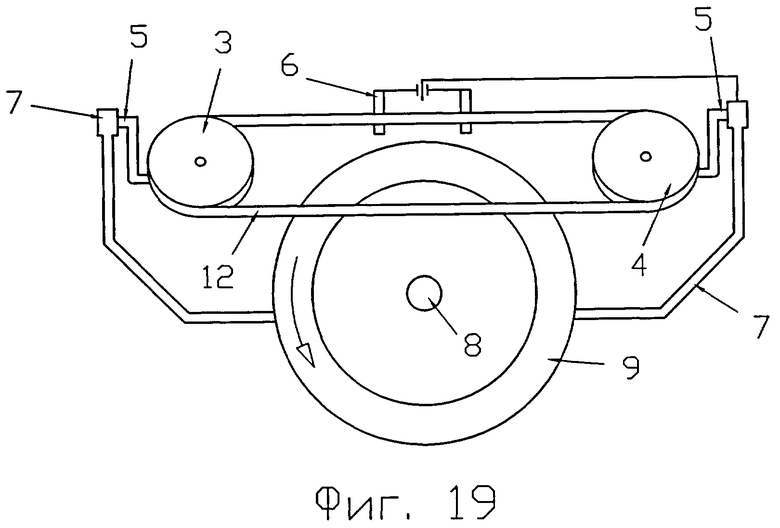
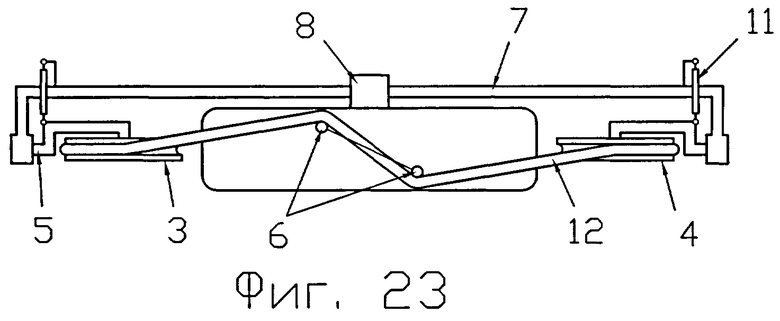
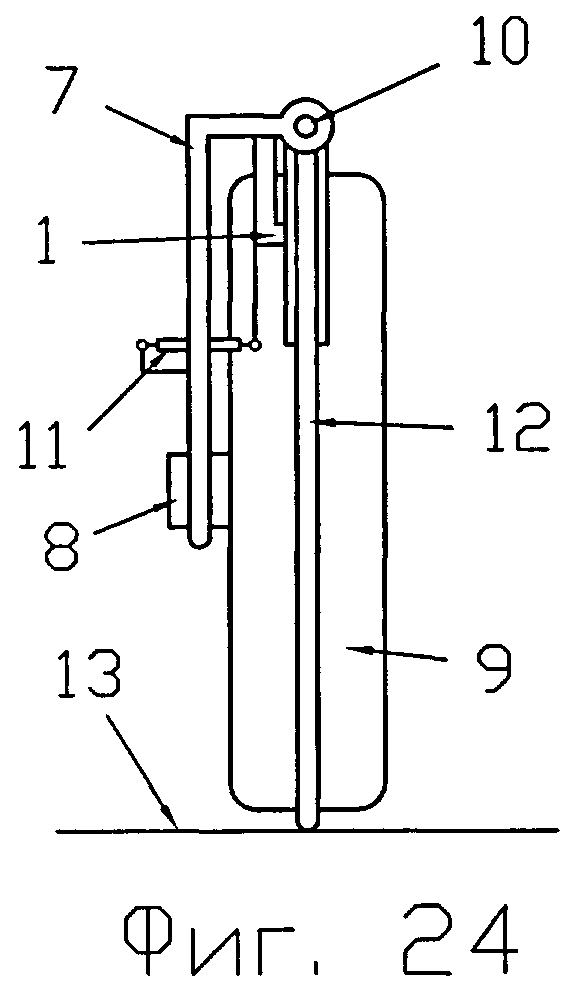
На фиг.19, 20, 21, 22, 23, 24 - вариант применения автоматических цепей обвода 12 применительно к транспорту, преимущественно эксплуатируемому в тяжелых дорожных условиях, например к сельскохозяйственной колесной технике или автомобилям Крайнего Севера, отличительным моментом которых является постоянный колесно-сцепной ход, осуществляемый без поворота направляющих колес 3 и 4 с временным переходом на колесный при их отклонении от нормали.
Фиг.25, 26, 27 - накладные внешние переходные цепные устройства, соединенные промежуточными деталями с осью 8 колеса 9 автомобиля, что дает возможность более широкого применения устройств. Фиг.28 - общий вид.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Гуревич А.М., Сорокин Е.М. Тракторы и автомобили. 1978 г., стр.426, 368.
2. Шпаковский В.О. Танки уникальные и парадоксальные - из Интернета.
3. Автоматические цепи противоскольжения ONSPOT VBG - из Интернета.





















Изобретение относится автомобильному транспорту. Способ характеризуется вводом в зону контакта колес с опорной поверхностью части обвода путем создания перекоса между ними соответствующим смещением направляющих колес обвода относительно опорных колес транспортного средства. После диагонального взаимодействия это приводит к совмещению или разделению их плоскостей вращения с возможностью корректировки положения обвода в зоне контакта возвратно-поступательным движением направляющих колес с его возвратом в исходное положение при обратном переходе транспортного средства с колесно-сцепного режима движения на колесный режим качения его съездом с обвода и исключением их взаимодействия. Устройство преобразования движителей включает опорные колеса и обвод между направляющими колесами, оси которых соединены с осью колеса транспортного средства шарнирно с возможностью пересечения частью межколесного обвода опорного колеса с последующим совместным поступлением этой зоны пересечения в опорную зону колеса. Технический результат - автоматизация безостановочного преобразования колесного движителя в гусенично-сцепной и обратно. 2 н.п. ф-лы, 28 ил.
1. Способ перехода транспортных средств с колесного хода на колесно-сцепной и обратно, включающий опорные колеса и обвод между направляющими колесами транспортного средства, характеризующийся вводом в зону контакта колес с опорной поверхностью части обвода путем создания перекоса между ними соответствующим смещением направляющих колес обвода относительно опорных колес транспортного средства, приводящий после диагонального взаимодействия к совмещению или разделению их плоскостей вращения с возможностью корректировки положения обвода в зоне контакта возвратно-поступательным движением направляющих колес с его возвратом в исходное положение при обратном переходе транспортного средства с колесно-сцепного режима движения на колесный режим качения его съездом с обвода и исключением их взаимодействия.
2. Устройство преобразования движителей, включающее опорные колеса и обвод между направляющими колесами, оси которых соединены с осью колеса транспортного средства шарнирно с возможностью пересечения частью межколесного обвода опорного колеса с последующим совместным поступлением этой зоны пересечения в опорную зону колеса.
| ХОДОВАЯ СИСТЕМА ДЛЯ СРЕДСТВА ПЕРЕДВИЖЕНИЯ | 2002 |
|
RU2296075C2 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ АВТОМОБИЛЯ | 2000 |
|
RU2159193C1 |
| Ходовая часть транспортного средства | 1989 |
|
SU1652169A1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ВЕЗДЕХОДА И ВЕЗДЕХОД | 2009 |
|
RU2410277C9 |
| Ходовая часть транспортного средства | 1988 |
|
SU1556992A1 |
| Ходовая часть транспортного средства | 1989 |
|
SU1717462A1 |
| Ходовая часть транспортного средства | 1989 |
|
SU1726307A1 |
| СПОСОБ ПОЛУЧЕНИЯ КРЕМНИЙСОДЕРЖА1ДИХ СПИРТОВ | 0 |
|
SU239868A1 |
| CH 101570216 A, 04.11.2009 | |||
| Электроэнергетический блок электро-СТАНции | 1979 |
|
SU838894A1 |

