Изобретение относится к области автоматического управления и может быть использовано для управления динамическими объектами в химической промышленности, теплотехнике, приборостроении, а также для генерации сигналов различной амплитуды.
Регуляторы с релейной характеристикой (релейные регуляторы) широко распространены в технике (см., например, Цыпкин Я.З. Релейные автоматические системы. - М.: Наука, 1974, с.7-13, 51-55). Известны также регуляторы с релейными характеристиками, работающие по принципу «включено-выключено» и имеющие положительный или отрицательный гистерезис (см., например, а.с. СССР №№631864, 1418648 №1585778).
Наиболее близким по технической сути к заявляемому устройству является регулятор с релейной характеристикой по а.с. СССР №1418648. Опубл. Б.И. 1988, №31. Регулятор-прототип содержит индикатор экстремумов, нуль-орган, релейный блок, сумматор, два коммутирующих элемента, блок обнаружения отклонений, два задатчика уровней выходного сигнала.
Регулятор-прототип является релейным двухпозиционным регулятором с отрицательным переменным гистерезисом и зоной нечувствительности, величина гистерезиса в котором поставлена в линейную зависимость от амплитуды автоколебаний. Особенность его заключается в том, что переключения регулятора происходят с опережением (с «недоходом») по отношению к сигналам, определяющим границы зоны нечувствительности.
Уравнение регулятора (закон управления, реализованный в регуляторе прототипе) имеет вид

где M(t)=xH+k·(xэ(t)-xH)-x(t), если x(t)<xH
M(t)=xB+k·(xэ(t)-xB)-x(t), если x(t)>xB,
хН=х0-с, хВ=х0+с - соответственно величины, определяющие нижнюю и верхнюю границы зоны нечувствительности,
x0 - задание (заданное конечное значение регулируемой координаты x(t) (переменной)),
с - половина ширины зоны нечувствительности,
k - постоянный коэффициент, меньший единицы, (0≤k<1),
xэ(t) - экстремальные значения регулируемой координаты, равные ее максимуму хмакс или минимуму хмин,
Sign - знаковая функция, равная +1 или -1 в зависимости от знака функции M(t),
В - величина управляющего воздействия («полка» реле),
∨ - знак дизъюнкции.
Статическая характеристика регулятора представлена на Фиг.1.
Существует также класс двухпозиционных релейных регуляторов с положительным гистерезисом, переключение управления в которых всегда происходит с запаздыванием по отношению к сигналам границ зоны нечувствительности («нижней» - хН и «верхней» - хВ).
Недостаток регулятора - прототипа (так и релейных регуляторов с положительны гистерезисом) заключаются в его неуниверсальности, которая заключается в том, что он не может перенастраиваться, оставаясь в рамках одной конструкции, и обеспечивать управление как с опережением, так и с запаздыванием переключений относительно сигналов границ зоны нечувствительности. Это сужает область его применения.
Техническим результатом изобретения является расширение функциональных возможностей регулятора, которое заключается в его универсализации - возможности функционировать как в качестве регулятора с положительным, так и с отрицательным гистерезисом и зоной нечувствительности.
Технический результат достигается тем, что в регулятор с релейной характеристикой, содержащий два коммутирующих элемента, блок обнаружения отклонений, два задатчика уровней выходного сигнала, релейный блок, нуль-орган, сумматор, индикатор экстремумов, выходы которого соединены с входами релейного блока, первый вход регулятора связан с входом индикатора экстремумов и первым инверсным входом нуль-органа, первый вход сумматора подсоединен к выходу релейного блока, а второй вход сумматора связан с сигнальным выходом блока обнаружения отклонений, первый и второй сигнальные входы которого подключены соответственно к первому и второму входам регулятора, управляющий выход - к управляющему входу второго коммутирующего элемента, выход нуль-органа соединен с управляющим входом первого коммутирующего элемента, первый и второй информационные входы которого подключены соответственно к выходам первого и второго задатчиков уровня выходного сигнала, выход - к информационному входу второго коммутирующего элемента, выход которого подключен к выходу регулятора, дополнительно введен переключатель, первый информационный вход которого соединен с выходом сумматора, второй информационный вход связан с информационным выходом блока обнаружения отклонений, а управляющий вход - с третьим входом регулятора, первый выход переключателя соединен с первым прямым входом нуль-органа, второй выход переключателя связан со вторым инверсным входом нуль-органа, третий выход переключателя соединен с первым и вторым прямыми входами нуль-органа.
Регулятор изображен на фиг.2, где представлена его блок-схема, и фиг.4, которая иллюстрирует пример конкретного выполнения регулятора на пневматических элементах УСЭППА, и фиг.3, где представлена модификация статической характеристики Фиг.1, при перенастройке регулятора. Регулятор содержит (фиг.2) индикатор экстремумов 1, нуль-орган 2, релейный блок 3, сумматор 4, блок 5 обнаружения отклонений, первый 6 и второй 7 коммутирующие элементы, первый 8 и второй 9 задатчики уровней выходного сигнала, переключатель 10. х - регулируемая координата, х0 - сигнал задания, u - выход регулятора, Z - дискретный управляющий сигнал «0» или «1», изменяющий состояние переключателя 10.
Первый вход регулятора (переменная - х) соединен с входами индикатора экстремумов 1, первым входом (инверсным) нуль-органа 2 и первым входом блока 5 обнаружения отклонений, второй вход регулятора x0 связан с первым информационным входом блока 5, а его информационный выход соединен с первым информационным входом переключателя 10 и вторым входом сумматора 4, выход которого соединен со вторым информационным входом переключателя 10, третий управляющий вход которого связан с третьим входом регулятора (Z). Выходы индикатора экстремумов соединены со входами релейного блока 3, выход которого соединен с первым входом сумматора 4, первый выход переключателя 10 соединен с первым прямым входом нуль-органа 2, второй выход переключателя 10 связан со вторым инверсным входом нуль-органа 2, третий выход переключателя 10 соединен с первым и вторым прямыми входами нуль-органа 2, а выход нуль-органа 2 связан с управляющим входом коммутирующего элемента 6, коммутирующие входы которого подключены к выходам задатчиков 8 и 9. Управляющий выход блока обнаружения отклонений 5 соединен с коммутирующим элементом 7, выход которого связан с выходом регулятора (u).
Подобное соединение элементов позволяет реализовать следующий закон управления:

где M(t)=xH+k·(xэ(t)-xH)-x(t), если x(t)<xH, при Z=0,
M(t)=xB+k·(xэ(t)-xB)-x(t), если x(t)>xB, при Z=0,
и
M(t)=xH-k·(xэ(t)-xH)-x(t), если x(t)<xH, при Z=1,
или
M(t)=xB-k·(xэ(t)-xB)-x(t), если x(t)>xB, при Z=1,
∨ - знак дизъюнкции,
что и дает возможность в одной конструкции реализовать законы управления как с отрицательным, так и положительным переменным гистерезисом и зоной нечувствительности, чем и достигается заявленный технический результат.
Рассмотрим работу отдельных элементов регулятора и устройства в целом по Фиг.3 и 4.
Индикатор 1 экстремумов (А.С. 482757. Б.И. 1975, №32) работает следующим образом. При изменении регулируемой координаты, например, в сторону уменьшения, на выходе элемента 11 запоминается сигнал хмакс при x(t))<(xмакс+а), где а - величина сдвига, настраиваемая в элементе 11 запоминания, элемент 16 срабатывает и отключает элемент запоминания 11, закрыв верхний контакт реле 14, а выход элемента запоминания 18 через другой контакт реле 14 соединяется с вторым входом элемента 16 сравнения. При дальнейшем уменьшении сигнала выходной сигнал элемента 16 сравнения не изменяется. С увеличением входного сигнала на выходе элемента 18 запоминания запоминается хмин, элемент 16 сравнения принимает исходное положение, а второй вход элемента 16 сравнения вновь соединяется с выходом элемента 11 запоминания максимума. Повторители 12 и 13 обеспечивают гальваническую развязку сигналов хмакс, хмин. Пневмоемкость 15 обеспечивает сохранение сигналов при переключениях реле 14.
Релейный блок 3 (двух контактное реле) обеспечивает коммутацию хмакс, хмин по команде с выхода элемента 16 сравнения на вход сумматора 4. Последний выполнен по схеме дроссельного сумматора. Его выход равен (1-k)·х1+k·хэ, где k=d/(d+b), d и b - проводимости дросселей сумматора, х1 и х(t)э - сигналы, действующие на входах сумматора 4.
Блок обнаружения отклонений - устройство, формирующее дискретный сигнал на своем первом выходе, если входной сигнал х становится меньше сигнала хН или больше сигнала хВ, которые определяют нижнюю и верхнюю границы зоны нечувствительности. Он содержит (фиг.4) повторители со сдвигом 17 и 18, входы которых соединены с каналом задания x0, а выходы - со входами элементов 19 и 20.С помощью элементов 17 и 18 задается зона допустимых отклонений соответственно +с и -с. При этом, если сигнал х меньше сигнала хН, то срабатывает элемент 20, его выходной сигнал через элемент ИЛИ 23 появляется на первом выходе блока 5, и одновременно переключает реле 22, обеспечивая коммутацию сигнала хН на второй выход блока 5 через усилитель 21. Если х≥хН, элемент 20 принимает исходное состояние его выходной сигнал переключает реле 22 и на информационном выходе блока 5 появляется сигнал хВ. Если х≥хВ, то срабатывает элемент 19 и его выходной сигнал появляется через элемент ИЛИ 23 на выходе блока 5. Элемент20 при этом находится в исходном состоянии, и на выход реле 22 проходит по-прежнему сигнал хВ. Если входной сигнал находится в зоне допустимых отклонений, то на выходах элементов 19 и 20 - «0»
Коммутирующие элементы 6 и 7 в данном случае реле, включенные по схеме коммутации двух сигналов, обеспечивают при наличии дискретного управляющего сигнала «1» на выходе блока 5, коммутацию на выход реле 7 сигнала управления, и который равен выходным сигналам заатчиков 8 и 9, а при действии управляющего сигнала «0» - на его выход коммутируется «0» («атмосфера») или условный нуль Р.
Переключатель 10 построен с использованием трех реле 24, 25, 26 и работает следующим образом. Пока сигнал Z=0, на прямой вход нуль-органа 2 через открытые контакты реле 24 и 26 проходит сигнал с выхода сумматора 4. Одновременно этот же сигнал связан с нижней камерой реле 24, отсеченной от информационного сигнала с выхода блока 5 (сигналы хН или хВ) закрытым контактом реле 24. В результате заявляемый регулятор ничем не отличается от регулятора - прототипа. В нем реализуется закон управления (1), а статическая характеристика регулятора имеет вид фиг.2.
Рассмотрим работу регулятора в целом, когда сигнал Z=1, а входная координата х изменяется от нуля в сторону увеличения (см. фиг.3). В момент включения срабатывают реле 24, 25, 26 и элемент 20, на выходе которого «1». В результате выходной сигнал сумматора 4 теперь через нижний контакт реле 25 соединяется с инверсным входом нуль-органа 2. На информационном выходе блока 5 формируется сигнал хН, который с элемента 18 через открытый выходным сигналом элемента 20 верхний контакт реле 22, усилитель 21, нижние контакты реле 24 и реле 26 подается на прямые входы нуль-органа 2 и на вход сумматора 4, на другом входе которого действует выходной сигнал индикатора экстремумов 1 хэ=хмин=0. Выходной сигнал нуль-органа 2 теперь определяется алгебраической суммой четырех сигналов
M(t)=xH-((1-k)·xH+k·xЭ(t))+xH-x(t).
После несложных преобразований с учетом того, что xэ=0, получим
M(t)=(1+k)·xH-x(t).
Величина сигнала M(t)>0, поэтому выходной сигнал нуль-органа 2 равен «1». Этот сигнал переключает реле 6, и выходной сигнал задатчика 9 через верхние открытые контакты реле 6 и 7 проходит на выход регулятора. Этот сигнал равен +В. Дальнейшее увеличение сигнала переменной x(t) до зоны нечувствительности приводит к переключению элемента 20 и появлению на сигнальном выходе блока 5 «0», который переключает реле 7, через нижний открытый контакт которого на выход регулятора проходит сигнал Р - условный нуль, а на вход сумматора 4 и прямые входы нуль-органа 2 сигнал хВ с выхода элемента 17. Сигнал M(t) становится равным M(t)=(1+k)·хВ-x(t), и остается по-прежнему больше нуля. Поэтому выходной сигнал нуль-органа 2 не меняется. Когда входной сигнал достигает верхней границы зоны нечувствительности хВ, срабатывает элемент 19, выходной сигнал которого переключает реле 7 и через его открытый верхний контакт на выход регулятора вновь проходит сигнал с задатчика 9. Когда сигнал M(t) обращается в нуль, срабатывает нуль-орган 2. Его выходной сигнал переключает реле 6 и на выход регулятора проходит сигнал с задатчика 8, который равен -В.
Дальнейшее увеличение входного сигнала не приводит к каким-либо изменением состояния регулятора.
При изменении входного сигнала в сторону уменьшения на выходе индикатора экстремумов запоминается сигнал xмакс, и состояние нуль-органа 2 теперь будет определяться суммой сигналов
M(t)=xB-((1-k)·xB+k·xмакс(t))+xB-x(t)=xB-k(xмакс(t)-xB)-x(t).
Однако выходной сигнал нуль-органа 2 по-прежнему не меняется и остается равным «0», поскольку M(t)<0. Когда входной сигнал становится равным сигналу хВ, срабатывает элемент 19 и переключает реле 7. В результате выход регулятора снова становится равным Р. Дальнейшее уменьшение переменной х до значения хН вновь приводит к коммутации сигнала хН на входы нуль-органа 2 и сумматора 4 через открытый выходным сигналом элемента 20 верхний контакт реле 22. В результате состояние нуль-органа 2 теперь будет определятся суммой сигналов
M(t)=xH-k(xмакс(t)-xH)-x(t)
и его срабатывание произойдет с запаздыванием по отношению к нижней зоне нечувствительности, которая определяется величиной сигнала хН. Далее цикл повторяется.
На Фиг.5 и Фиг.6 приведены графики переходных процессов (переменной и управления) в релейной системе, полученные методом цифрового моделирования в среде MCAD. Алгоритм функционирования релейного регулятора реализует закон (2). Объект управления переводится из заданного начального состояния х(0)=0 в конечное состояние х0=0.8 и имеет передаточную функцию  . Настройки и параметры регулятора имели следующие значения: В=1, k=0.3, с=0.1, хН=0.7, хВ=0.9 Процессы на Фиг.5 и Фиг.6 соответствуют управлению при наличии сигнала соответственно Z=0 и Z=l. Нетрудно видеть, что моменты переключения управления точно соответствуют закону (2) и описанию работы устройства.
. Настройки и параметры регулятора имели следующие значения: В=1, k=0.3, с=0.1, хН=0.7, хВ=0.9 Процессы на Фиг.5 и Фиг.6 соответствуют управлению при наличии сигнала соответственно Z=0 и Z=l. Нетрудно видеть, что моменты переключения управления точно соответствуют закону (2) и описанию работы устройства.
Следует обратить внимание также на то, что в данном устройстве можно изменением настроек трансформировать его статические характеристики. Если, например, в сумматоре 4 установить коэффициент k=0, регулятор становится регулятором типа «идеальное» реле с зоной нечувствительности, а дополнительно установив величину с в блоке 5 равным нулю, он превращается просто в «идеальное» реле. Изменяя настройки устройства, можно легко получить нелинейность типа реле с положительным или отрицательным гистерезисом без зоны нечувствительности, нелинейность типа «сухое трение» и другие (до 8 нелинейностей), чем и достигается цель заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2003 |
|
RU2242039C2 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| Регулятор с релейной характеристикой | 1987 |
|
SU1418648A2 |
Данное изобретение относится к области средств автоматизации и может использоваться в системах управления технологическими процессами в химической промышленности, теплотехнике, а также для генерации сигналов различной частоты и амплитуды. Технический результат заключается в расширении функциональных возможностей регулятора. Он достигается тем, что регулятор содержит блок обнаружения отклонений входного сигнала от заданной величины зоны нечувствительности, индикатор экстремумов, нуль-орган, задатчики уровней выходного сигнала, переключатель, коммутирующие элементы. Отличительная особенность регулятора заключается в возможности изменения его статических и динамических характеристик путем изменения настроек. В частности, алгоритм функционирования устройства допускает реализацию в нем как положительного, так и отрицательного переменного гистерезиса, величина которого поставлена в линейную зависимость от амплитуды входного сигнала. 6 ил.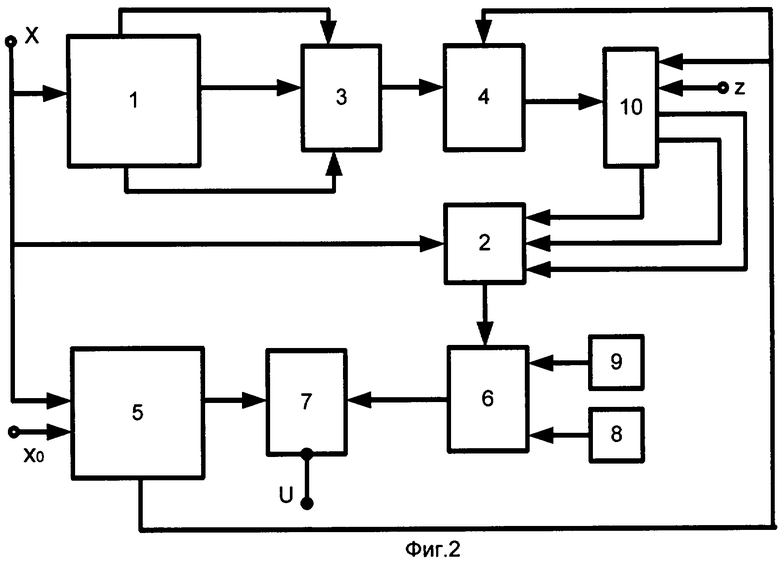
Регулятор с релейной характеристикой, содержащий два коммутирующих элемента, блок обнаружения отклонений, два задатчика уровней выходного сигнала, релейный блок, нуль-орган, сумматор, индикатор экстремумов, выходы которого соединены с входами релейного блока, первый вход регулятора связан с входом индикатора экстремумов и первым инверсным входом нуль-органа, первый вход сумматора подсоединен к выходу релейного блока, а второй вход сумматора связан с сигнальным выходом блока обнаружения отклонений, первый и второй сигнальные входы которого подключены соответственно к первому и второму входам регулятора, управляющий выход - к управляющему входу второго коммутирующего элемента, выход нуль-органа соединен с управляющим входом первого коммутирующего элемента, первый и второй информационные входы которого подключены соответственно к выходам первого и второго задатчиков уровня выходного сигнала, выход - к информационному входу второго коммутирующего элемента, выход которого подключен к выходу регулятора, отличающийся тем, что в него введен переключатель, первый информационный вход которого соединен с выходом сумматора, второй информационный вход связан с информационным выходом блока обнаружения отклонений, а управляющий вход - с третьим входом регулятора, первый выход переключателя соединен с первым прямым входом нуль-органа, второй выход переключателя связан со вторым инверсным входом нуль-органа, третий выход переключателя соединен с первым и вторым прямыми входами нуль-органа, при этом переключатель обеспечивает возможность переключать регулятор как с опережением, так и с запаздыванием по отношению к сигналам, определяющим границы зоны нечувствительности, при изменении управляющего сигнала переключателя.
| Регулятор с релейной характеристикой | 1987 |
|
SU1418648A2 |
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| DE 10246906 А1, 06.05.2004. | |||

