00 О) |iki 00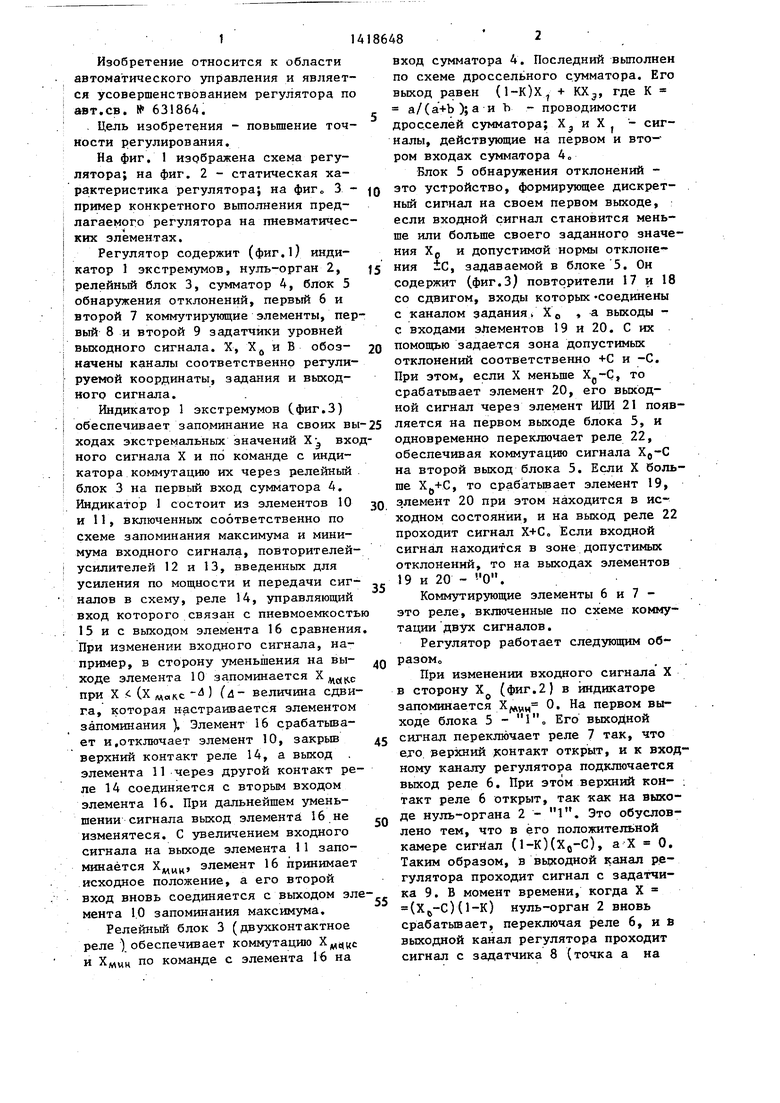

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2007 |
|
RU2359305C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| Регулятор с релейной характеристикой | 1986 |
|
SU1432456A2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2003 |
|
RU2242039C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
Изобретение относится к устройствам для регулирования, и управления, а именно к автоматическим регуляторам. Цель изобретения - повьшение точности регулирования Это достигается тем, что в него введены блок обнаружения отклонений, два задатчи- ка уровней выходного сигнала, два коммутирующих элемента. В результате регулятор становится регулятором с отрицательным гистерезисом и зоной нечувствительности, что позволяет исключить автоколебания в системе. 3 ил.: с S
ю
1
Изобретение относится к области автоматического управления и являет- : ся усовершенствованием регулятора по I авт.св. № 631864.
Цель изобретения - повьшение точности регулирования.
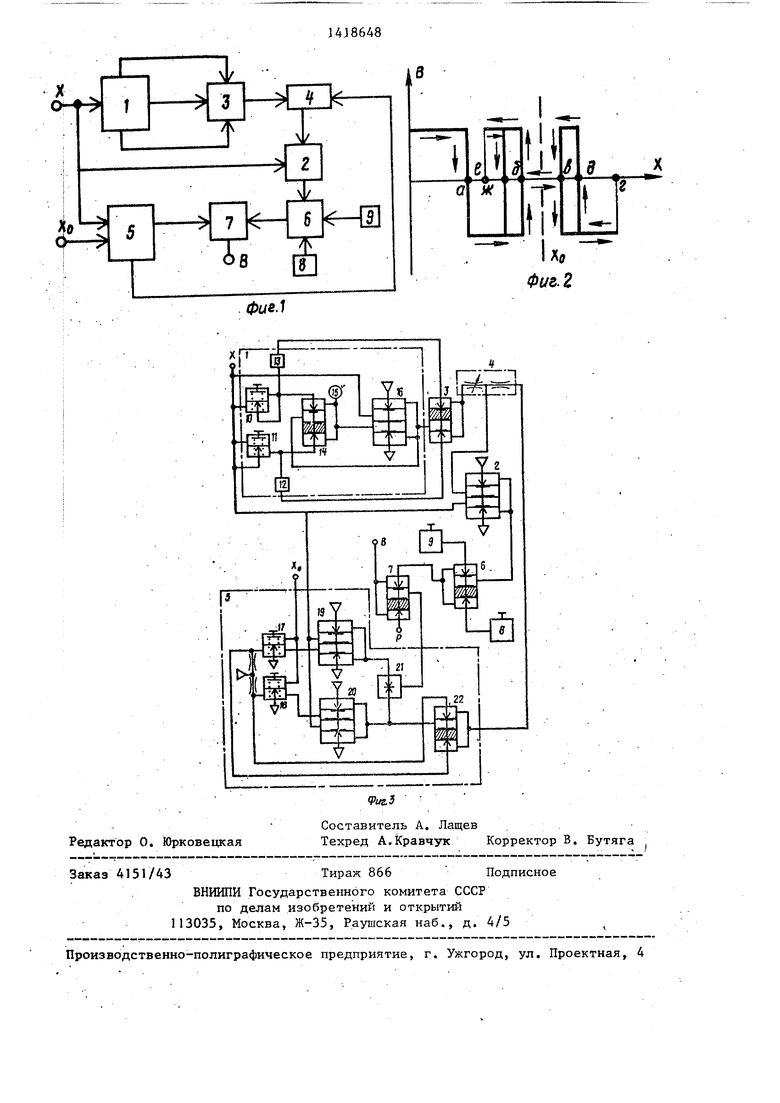
На фиг. 1 изображена схема регулятора; на фиг. 2 - статическая характеристика регулятора; на фиг„ 3 - пример конкретного вьтолнения пред- I лагаемого регулятора на пневматических элементах.
Регулятор содержит (фиг.1) инди- I катор 1 экстремумов, нуль-орган 2, I релейный блок 3, сумматор 4, блок 5 : обнаружения отклонений, первый 6 и I второй 7 коммутирующие элементы, пер I вый 8 и второй 9 задатчики уровней I выходного сигнала. X, Х и В обоз- ; начены каналы соответственно регули- ; руемой координаты, задания и выход- I ного сигнала.
i Индикатор 1 экстремумов (фиг.З) I обеспечивает запоминание на своих вы ходах экстремальных значений X вхо i ного сигнала X и по команде с инди- ; катора коммутацию их через релейный I блок 3 на первый вход сумматора 4. Индикатор 1 состоит из элементов 10 и 11, включенных соответственно по схеме запоминания максимума и минимума входного сигнала, повторителей- I усилителей 12 и 13, введенных для усиления по мощности и передачи сигналов в схему, реле 14, управляющий вход которого связан с пневмоемкость . 15 и с выходом элемента 16 сравнения При изменении входного сигнала, например, в сторону уменьшения на выходе элемента 10 запоминается X . при X (Х „дс,кс } (л- величина сдвига, которая настраивается элементом запоминания Элемент 16 срабатьша- ет и,отключает элемент 10, закрью верхний контакт реле 14, а выход элемента 11 через другой контакт реле 1 4 соединяется с вторым входом элемента 16. При дальнейшем уменьшении сигнала выход элемента 16 не изменятеся. С увеличением входного сигнала на выходе элемента 11 запоминается Х(,,, элемент 16 принимает исходное положение, а его второй вход вновь соединяется с выходом элемента 1.0 запоминания максимума.
Релейный блок 3 (двухконтактное реле ) обеспечивает коммутацию и X.л по команде с элемента 16 на
86482
вход сумматора 4. Последний вьшолнен по схеме дроссельного сумматора. Его выход равен (1-К)Х| + КХ, где К а/(а+Ь);а и Ь - проводимости дросселей сумматора; Х и X - сигналы, действующие на первом и втором входах сумматора 4
Блок 5 обнаружения отклонений Q это устройство, формирующее дискретный сиг-нал на своем первом выходе, если входной сигнал становится меньше или больше своего заданного значения Хр и допустимой нормы отклоне5 ния iC, задаваемой в блоке 5. Он содержит (фиг.З) повторители 17 и 18 со сдвигом, входы которых «соединены с каналом задания/ Xj, , а выходы - с входами элементов 19 и 20. С их
0 помощью задается зона допустимых отклонений соответственно +С и -С. При этом, если X меньше X -С, то срабатывает элемент 20, его выходной сигнал через элемент ИЛИ 21 появ5 ляется на первом выходе блока 5, и одновременно переключает реле 22, обеспечивая коммутацию сигнала на второй выход блока 5. Если X больше Xjj+C, то срабатывает элемент 19,
0 элемент 20 при этом находится в ис- ходном состоянии, и на выход реле 22 проходит сигнал Х+С. Если входной сигнал находится в зоне допустимых отклонений, то на выходах элементов 19 и 20 - - О.
Коммутирующие элементы 6 и 7 - это реле, включенные по схеме коммутации двух сигналов.
Регулятор работает следующим об
д разомо
При изменении входного сигнала X в сторону Х (фиг.2) в индикаторе запоминается Х(,у,„ 0. На первом выходе блока 5 - Его выходной
5 сигнал переключает реле 7 так, что его верзший сонтакт открыт, и к входному каналу регулятора подключается выход реле 6. При этом верхний кон- ; такт реле 6 открыт, так как на выходе нуль-органа 2 - 1. Это обусловлено тем, что в его положительной камере сигйал (1-К)(Хо-С), а X 0. Таким образом, в вьрсодной канал регулятора проходит сигнал с задатчи- ка 9. В момент времени, когда X () (1-К) нуль-орган 2 вновь срабатьшает, переключая реле 6, и в выходной канал регулятора проходит сигнал с задатчика 8 (точка а на
5
0
фиг.2), В момент времени, когда X Хр -С (точка h на фиГо2), на первом выходе блока 5 - О, верхний контакт реле 7 закрьшается, и на вы- ходе регулятора устанавливается сигнал нулевого уровня В пневмоавтоматике - это условньгй нуль, в виде давления Р, которое больше атмосферного.
Когда сигнал X становится больше Xр +С точка г на фиг. 2 , срабатывает элемент 19 и подключает к выходу регулятора залатчик 8. через реле 6 (последнее открьшается дискретным выходным сигналом блока 5 ), так как выход нуль-органа 2 по-прежнему остается равным нулю. Выходной сигнал элемента 20 переключает реле 22, и на второй выход суммато ра 4 пода- ется теперь сигнал XQ +0, но в положительной камере нуль-органа 2 формируется сигнал (1-к)(Хд +С), который меньше X (величина X в этот момент равна XQ +С). Дальнейшее нарас- тание входного сигнала до точки г никаких переключений в регуляторе не производит. Пусть от точки 2 (фиг.2) X уменьшается до точки е, а з-атем вновь нарастает до точки ж. Тогда в точке г индикатор 1 экстремумов запоминает ,ц и на выходе сумматора 4 формируется сигнал (1-К)(Х(,+С + KX(, каторый пока меньше , пусть, например, Хд 60 кПа, Х 80 кПа, К - 0,5, С 5 кПа, тогда (1-0,5)(60+5)+ 0,5 80 72,5 кПа; однако эта величина больше, чем (Х(,+ +С) . При дальнейшем уменьшении X, когда X становится меньше, чем (-k)CXg +C)+KXyv,e(K.c (точка д. на фиг. 2), срабатьшает нуль-орган 2 и на выход регулятора теперь проходит сигнал с задатчика 9, Затем в
точке г, когда X входит в зону допус- 45 ход нуль-органа соединен с управляютимых отклонений, выходной сигнал регулятора становится, вновь равным Р. Далее, в точке б, когда X выходит из допустимой зоны отклонения, на выходе регулятора устанавливается сигнал с задатчика 9, так как выходной сигнал элемента 20 через элемент ИЛИ 21 вновь открьшает реле 7, Выход нуль-органа 2 при этом не изменяется, поскольку сигнал (1-К)ГХв-С + по-прежнему больше Х„ Этот сигнал с выхода регулятора сохраняется до тех пор, пока X не достигне точки ж. Здесь сигнал (l-K)(Xj-C) +
+КХ
мин
становится рэвным X, что приводит к переключению нуль-органа 2, и на выход регулятора через реле 6 и 7 проходит сигнал с задатчика 8, Далее цикл повторяется„
Точки а, д и ж, в которых происходят переключения, не .являются раз и навсегда фиксированными, но они всегда находятся соответственно слева точки а и ж и справа точка д от фиксированной зоны допустимых отклонений.
Г
Наличие зоны нечзшствительности в регуляторе позволяет исключить автоколебания в системе, а способность регулятора к переключениям с недоходом регулируемой координаты до зоны нечувствительности позволяет уменьшить эту зону, повысив тем самым и точность регулирования в установившемся режиме.
Формула изобретения
Регулятор с релейнойг характерне- тикой по авт.св, № 631864, отличающийся тем, что, с целью повьшхения точности регулирования, в него введены два задатчик& уро1вней выходного сигнала, два коммутирующих элемента и бло к обнаружения отклонений, первый и. второй сигнальные вькоды которого подключены соответственно к первому и второму входам регулятора, управлякяций выход - к управляющему входу второго коммутирующего элемента, а сигнальйый выход - к второму входу сумматора, выщим входом первого коммутирующего элемента, первый и второй информационные входы которого подключены соответственно к выходам первого и второ- 50 го задатчиков уровня выходного сигнала, а выход - к информационному входу второго коммутирующего элемента, выход которого подключен к выходу регулятора.
| Регулятор с релейной характеристикой | 1976 |
|
SU631864A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
