Изобретение касается прежде всего двигателя с реактивным ротором и статором, при этом ротор имеет роторные сегменты, которые в свободно стоящих областях сформированы, по существу, в виде прямоугольников, торцевые стороны которых имеют вид участков окружности.
Двигатели с реактивным ротором названного рода известны. Можно сослаться, например, на DE 100 35 540 A1. Там представлен и описан двигатель с реактивным ротором, ротор которого снабжен четырьмя роторными сегментами, которые расположены с равномерным угловым распределением. Эти роторные сегменты выступают радиально наружу относительно оси вращения ротора, и имеют, по существу, прямоугольный вид в плане, при этом обращенные радиально наружу торцевые стороны, по существу, имеют вид в плане в форме части окружности.
В отношении описанного ранее уровня техники техническая проблематика изобретения усматривается в усовершенствовании двигателя с реактивным ротором названного рода, в частности относительно выполнения ротора.
Эта проблематика в первую очередь и в основном решена с помощью предмета пункта 1 формулы изобретения, при этом основным моментом является то, что переход торцевой стороны в расположенные напротив плоские стороны в плане выполнен скругленным. По сравнению с решениями, представляющими уровень техники, не имеется никаких угловых областей с острой кромкой между торцевой стороной и поверхностью роторного сегмента. Напротив, эти угловые области скруглены, так что в процессе изготовления двигателя с реактивным ротором упрощается установка ротора в статор. В процессе установки ротора в статор не возникает каких-либо зацепов, что при угловых областях с острой кромкой часто могло бы привести к повреждениям. Так как скругление угловых областей в принципе означает потери в материале, в такой же степени предусмотрено расширение угловых областей, которые снабжены предложенным согласно изобретению скруглением. Вследствие этого желаемое скругление не влияет на характеристики двигателя. Так предусмотрено, что переходы в направлении периметра соответственно на другой стороне выполнены прямолинейным удлинением плоских сторон. Так роторные сегменты в области переходов имеют ширину, замеренную поперек радиальной протяженности роторного сегмента, которая примерно от 1,1 до 3,3 раз, предпочтительно в 1,2 раза соответствует замеренной в этом направлении ширине роторного сегмента в области плоских сторон. Относительно этого далее является предпочтительным то, что радиус скругления лежит в области между 0,3 и 2 мм, предпочтительно равен примерно 0,5 мм.
Изобретение касается двигателя с реактивным ротором с признаками ограничительной части пункта 1 формулы изобретения, у которого для упрощения балансировки ротора предлагается, что выборочно на одной или нескольких плоских сторонах роторного сегмента для балансировки ротора осуществляется удаление материала, при необходимости, в различной мере. Таким образом, достигается балансировка при относительно больших наружных диаметрах, при этом требуется только совсем небольшое удаление материала. В зависимости от конкретных данных на боковой стороне роторного сегмента могут предусматриваться несколько, при необходимости, различной величины выемок. Особо предпочтительным оказывается в этом отношении, что удаление материала осуществляется путем фрезерования.
Кроме того, изобретение касается двигателя с реактивным ротором с признаками ограничительной части пункта 1 формулы изобретения. Чтобы улучшить выполнение двигателя с реактивным ротором названного рода, в частности относительно образования его ротора, предлагается, чтобы ротор был собран из большого количества тонких листов металла, расположенных по оси друг над другом. Могут применяться листы, полученные методом штамповки, которые, располагаясь аксиально друг над другом, позволяют варьировать высоту ротора. Благодаря расположению большего или меньшего числа роторных листов можно варьировать пакетом ротора в направлении оси ротора, что, в частности, облегчает изготовление ротора. Чтобы закрепить собранный из листов роторный пакет, предусмотрено, что листы склеены друг с другом. В этом плане предпочтительно, чтобы склеивание было осуществлено путем покрытия листов печным лаком. Благодаря применению подобного рода листов с печным лаком и соответствующей термической обработки обеспечивается дальнейшее улучшение устойчивости ротора. Под листом с печным лаком понимается лист, который при необходимости дополнительно к двухстороннему изоляционному слою имеет еще и слой печного лака. Этот слой печного лака приобретает при повышении температуры (обжиге) состояние клея. Благодаря такому склеиванию обеспечивается соединение отдельных роторных листов в общий пакет, что может рассматриваться как преимущество в плане балансировки и устойчивости. Таким образом, благодаря склеиванию исключается поворот отдельных листов относительно друг друга.
Наконец, изобретение касается двигателя с реактивным ротором с признаками ограничительной части пункта 1 формулы изобретения, при этом ротор снабжен диском датчика. Такой неподвижно соединенный с ротором диск датчика служит для определения положения ротора, так, в частности, с помощью взаимодействия датчика с неподвижным световым затвором или подобным устройством. Чтобы еще улучшить мотор с реактивным ротором названного рода, в частности, относительно выполнения датчика, предусмотрено, что каждому роторному сегменту придан элемент, образующий форму датчика, при этом, однако, во всяком случае, осевая кромка элемента, образующего форму датчика, имеет смещение по окружности на 7, 5° относительно плоской стороны соответствующего роторного сегмента. Благодаря этому предложенное выполнение обеспечивает работу четырехфазных двигателей с реактивным ротором как при левом, так и при правом вращении. Кроме этого согласно изобретению диск датчика выполнен симметричным, так что ширина элемента, образующего форму датчика, соответствует ширине зазора между двумя элементами, образующими форму датчика. Благодаря этому создается симметричный сигнал от датчиков, при этом предпочтительно, что при двух предусмотренных подлежащих непрерывной работе раздвоенных световых затворах при одном обороте создается 24 импульса. При этом получается при 8/6 двигателе с реактивным ротором, т.е. двигателе с реактивным ротором, который имеет шесть сегментов ротора, и статором, который имеет восемь обмоток, четыре однозначные информации о положении для управления одной из четырех фаз статора. Далее предусмотрено, что сегмент ротора имеет угловой размер свыше 30°. Из этого вытекает то преимущество, что элемент, образующий форму датчика, имеет участок завихрения, что, в свою очередь, предпочтительно, так как элемент, образующий форму датчика, в плане выполнен прямолинейным и при этом примыкает примерно в форме секущей к имеющему в плане форму диска датчику. Благодаря этому упрощается изготовление датчика диска, так как он может формоваться с помощью штамповки с последующей отбортовкой элементов, образующих форму датчика. Идущие прямолинейно элементы, образующие форму датчика, дают эффект вентиляции, которая служит для очистки предусмотренных и подлежащих постоянной эксплуатации вилочных световых затворов. Это ведет к подавлению помех и препятствует загрязнению вилочных световых затворов, в частности, при большом числе оборотов. Благодаря созданию турбулентности воздуха происходит даже автоматическая очистка светового затвора.
Далее изобретение поясняется с помощью приложенных чертежей, на которых представлен лишь один пример выполнения. На чертежах показывают:
Фиг.1 - двигатель с реактивным ротором согласно изобретению в собранном виде в перспективном изображении;
Фиг.2 - детали двигателя с реактивным ротором в разобраном виде в перспективном изображении;
Фиг.3 - ротор с неподвижно установленным диском датчика и также неподвижно расположенным вентилятором в перспективном изображении;
Фиг.4 - увеличенный разрез по линии IV-IV на фиг.3;
Фиг.5 - вид сверху ротора с видом на диск датчика;
Фиг.6 - вид сбоку того же;
Фиг.7 - разрез по линии VII-VII на фиг.5;
Фиг.8 - роторный лист, вид сверху;
Фиг.9 - увеличенный узел области IX на фиг.8;
Фиг.10 - роторный лист в перспективном изображении;
Фиг.11 - диск датчика вид сверху;
Фиг.12 - диск датчика вид сбоку;
Фиг.13 - перспективное изображение диска датчика.
Прежде всего дается описание представленного на фиг.1 и 2 двигателя 1 с реактивным ротором, который, по существу, состоит из ротора 3, установленного без возможности проворачивания на оси 2 ротора, точно также установленного на оси 2 ротора и соединяемого без возможности проворачивания с ротором 3 диска 4 датчика, а также располагаемого без возможности проворачивания на стороне ротора 3, противолежащей диску 4 датчика, вентилятора 5, статора 6 с состоящей из двух частей крышкой 7 статора для установки непоказанных обмоток статора и двух закрепляемых по обеим сторонам статора 6 мостов 8, 9, в которых установлены опирающиеся на них концы оси 2 статора.
Представленный двигатель с реактивным ротором 1 представляет так называемый двигатель с реактивным ротором 8/6, который имеет ротор 3 с шестью сегментами 10 и статор 6 с восемью подробно не показанными секциями обмотки статора. Роторные сегменты 10 равномерно распределены по периметру основного тела ротора, от которого они выступают в радиальном направлении, при этом ротор 3 состоит из большого числа расположенных один над другим одинаковых роторных листов 11. Каждый роторный лист 11 представляет собой штампованную деталь, которая с одной стороны снабжена покрытием из печного лака. С помощью этого покрытия расположенные друг над другом роторные листы 11 путем приложения тепловой нагрузки склеиваются друг с другом для образования ротора 3.
Каждый сегмент 10 ротора в плане имеет, по существу, форму прямоугольника, его торцевая сторона 12 представляет собой часть окружности, плоские стороны 13 проходят параллельно друг другу. Каждый сегмент 10 ротора на переходе от плоских сторон 13 к торцевой стороне 12 имеет расширение 14, в котором переход к торцевой стороне 12 скруглен. Вследствие расширения в концевой области сегмента 10 ротора образованы переходы в направлении периферической окружности соответственно за каждым прямолинейным удлинением плоских сторон 13 (см., в частности, увеличенное изображение на фиг.9).
Радиус r закругления 14 составляет в представленном примере выполнения около 0,5 мм.
Для балансировки ротора 3 он в области плоской стороны 13 сегмента 10 ротора снабжен выемками 15, полученными путем фрезерования, эти выемки имеют различный размер как относительно длины, замеренной в направлении оси ротора, так и относительно их глубины. Как можно видеть на фиг.3, некоторые выемки 15 возможны в области плоской стороны 13.
Закрепленный без возможности проворачивания вместе с ротором 3 на оси 2 ротора диск 4 датчика принимает на себя функции зажимной плиты для ротора 3, состоящего из отдельных листов 11 металла, и служит для повышения осевой прочности ротора 3. Ступица 16 диска 4 датчика выступает перед основной частью 17 диска, так что при установке на тело оси 2 ротора создается упругое предварительное натяжение в пакете ротора.
На стороне ротора 3, обращенной от диска 4 датчика, предусмотрен вентилятор 5, который без возможности проворачивания расположен на роторе, вентилятор вместе с диском 4 датчика удерживают с двух сторон роторный пакет. Для этого вентилятор 5 установлен на имеющем надрезы участке тела оси ротора 2.
Диск 4 датчика выполнен штамповкой и последующей отбортовкой элементов 18, образующих форму датчика, в результате получается, что элементы 18, образующие форму датчика, идут по прямой линии и образуют что-то вроде секущей края основного тела 17 диска. Каждый элемент 18, образующий форму датчика, занимает дугу в 30° периферийной окружности. В связи с этим ширина остающегося зазора между двумя элементами 18, образующими форму датчика, равна ширине элемента 18, образующего форму датчика, так что в итоге формируется симметричный диск 4 датчика.
В результате подобного выполнения диска 4 датчика при обороте ротора 3 создается 24 импульса при устройстве двух вилочных световых затворов 19, которые должны проходить через элементы 18, образующие форму датчика. Таким образом, получают четыре однозначных информации о положении для управления каждой из четырех фаз статора 6, снабженного восемью обмотками.
Благодаря тому что элементы 18, образующие форму датчика, проходят по прямой линии, они играют роль участков 20, создающих завихрение. Благодаря этому возникает вентиляционный эффект, с помощью которого обеспечивается автоматическая очистка вилочных световых затворов 19.
Соответствие диска 4 датчика ротору 3 выбирается таким образом, что при одинаковом числе элементов 18, образующих форму датчика, и сегментов 10 ротора каждый элемент 18, образующий форму датчика, устанавливается так, что аксиальная боковая сторона 21 элемента 18, образующего форму датчика, имеет смещение по окружности относительно плоской стороны 13 соответствующего сегмента 10 ротора на 7,5° (см. угол α на фиг.5). Благодаря такому угловому смещению не возникает проблем для работы четырехфазного двигателя 1 с реактивным ротором как при левом, так и правом вращении.
Все раскрытые признаки являются существенными для изобретения. В раскрытии заявки настоящим приобщается полностью также содержание раскрытия соответствующих/приложенных приоритетных материалов (копия предварительной заявки) с целью включения признаков этих материалов в формулу изобретения настоящей заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесщеточная электрическая машина постоянного тока дискового типа | 1982 |
|
SU1494877A3 |
| РОТОРНЫЙ ДВИГАТЕЛЬ КРЯЖЕВСКИХ | 2006 |
|
RU2337246C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2556838C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2350005C2 |
| РОТОРНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ | 2018 |
|
RU2757704C1 |
| РЕАКТИВНЫЙ РОТОР С МЕХАНИЧЕСКОЙ СТАБИЛИЗАЦИЕЙ | 2015 |
|
RU2653177C2 |
| НАСОС ВСПОМОГАТЕЛЬНОГО КРОВООБРАЩЕНИЯ С ТОРЦЕВЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2744482C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2023 |
|
RU2795867C1 |
| РОТОРНО-КАНАЛЬНЫЙ ДВИГАТЕЛЬ | 2024 |
|
RU2832511C1 |
| Вентильный электродвигатель | 1984 |
|
SU1346059A3 |
Изобретение относится к области электротехники и касается особенностей конструктивного выполнения двигателя (1) с реактивным ротором с ротором (3) и статором (6), у которого ротор (3) имеет роторные сегменты (10), которые в свободно стоящих областях сформированы, по существу, в виде прямоугольников, торцевые стороны (12) которых представлены участками круга, причем каждый переход торцевой стороны (12) в расположенные напротив плоские стороны (13) в плане выполнен скругленным, переходы в направлении периферийной окружности выполнены соответственно по другую сторону каждого прямолинейного удлинения плоских сторон (13), а радиус упомянутого округления лежит между 0,3 и 2 мм. Предусмотрено также, что двигатель с реактивным ротором балансируется путем выборки материала на плоских сторонах роторных сегментов, и ротор состоит из большого числа расположенных друг за другом тонких металлических листов. Ротор имеет диск (4) датчика, при этом каждому роторному сегменту (10) придан элемент (18), образующий форму датчика, аксиальная боковая сторона (21) которого имеет смещение по окружности на 7,5° относительно плоской стороны (13) соответствующего роторного сегмента (10). Технический результат - упрощение изготовления и процесса балансировки ротора, обеспечивающей его устойчивость, создание симметричного сигнала от датчиков, а также обеспечение работы четырехфазных двигателей при левостороннем и правостороннем вращении ротора. 3 н. и 4 з.п. ф-лы, 13 ил.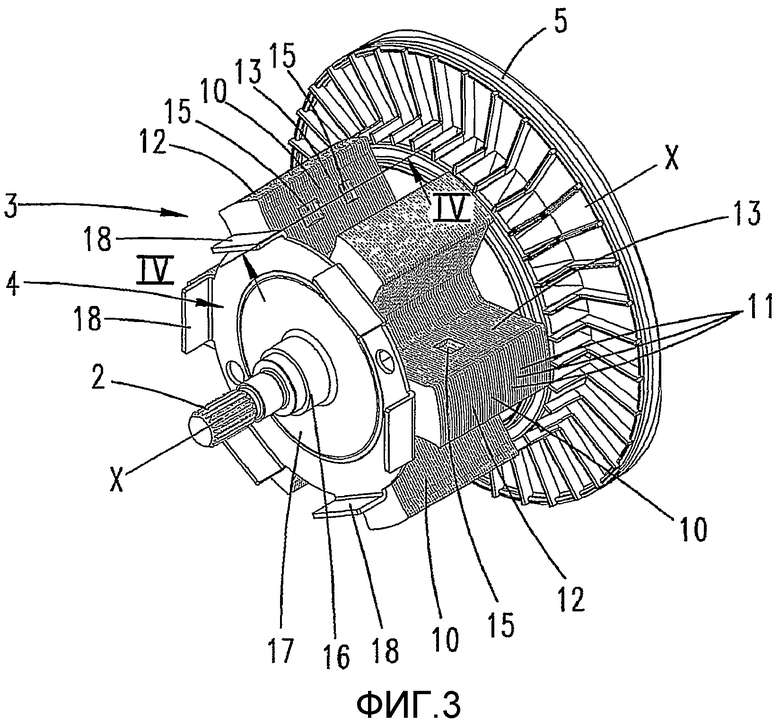
1. Двигатель (1) с реактивным ротором, содержащий ротор (3) и статор (6), при этом ротор (3) имеет роторные сегменты (10), которые в свободно стоящих областях сформированы по существу в виде прямоугольников, торцевые стороны которых представлены участками круга, отличающийся тем, что каждый переход торцевой стороны (12) в расположенные напротив плоские стороны (13) в плане выполнен скругленным, причем переходы в направлении периферийной окружности выполнены соответственно по другую сторону каждого прямолинейного удлинения плоских сторон (13), причем радиус скругления лежит между 0,3 и 2 мм.
2. Двигатель (1) с реактивным ротором, содержащий ротор (3) и статор (6), при этом ротор (3) имеет роторные сегменты (10), которые в свободно стоящих областях сформированы по существу в виде прямоугольников, торцевые стороны которых представлены участками круга, отличающийся тем, что выборочно на одной или нескольких плоских сторонах (13) сегментов (10) ротора для балансировки ротора (3) выполнена выборка материала, при необходимости различного размера.
3. Двигатель с реактивным ротором по п.2, отличающийся тем, что выборка материала осуществлена с помощью фрезерования.
4. Двигатель (1) с реактивным ротором, содержащий ротор (3) и статор (6), при этом ротор (3) имеет роторные сегменты (10), которые в свободно стоящих областях сформированы по существу в виде прямоугольников, торцевые стороны которых представлены участками круга, причем ротору (3) придан диск (4) датчика, отличающийся тем, что каждому роторному сегменту (10) придан элемент (18), образующий форму датчика, при этом, однако, во всяком случае аксиальная боковая сторона (21) элемента (18), образующего форму датчика, имеет смещение по окружности на 7,5° относительно плоской стороны (13) соответствующего роторного сегмента (10).
5. Двигатель с реактивным ротором по п.4, отличающийся тем, что элемент (18), образующий форму датчика, занимает дугу в 30° периферийной окружности.
6. Двигатель с реактивным ротором по п.4 или 5, отличающийся тем, что элемент (18), образующий форму датчика, создает участок (20) завихрения.
7. Двигатель с реактивным ротором по п.4, отличающийся тем, что элемент (18), образующий форму датчика, выполнен в плане проходящим по прямой линии.
| Устройство для подачи цилиндрических заготовок к обрабатывающей машине | 1976 |
|
SU625819A1 |
| ДИНАМИЧЕСКИ СБАЛАНСИРОВАННЫЙ МАЛОГАБАРИТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2177670C1 |
| Ротор синхронного реактивного двигателя | 1990 |
|
SU1802387A1 |
| Ротор синхронного реактивного двигателя А.В.Матвеева | 1983 |
|
SU1117778A1 |
| РОТОР ЭЛЕКТРОМАШИННОГО СИНХРОННО-РЕАКТИВНОГО ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 1992 |
|
RU2069438C1 |
| US 5432390 A, 11.07.1995 | |||
| US 4698537 A, 06.10.1987 | |||
| DE 20022406 U1, 03.01.2002 | |||
| KR 2002005125 A, 02.07.2002 | |||
| Антирезонансная упругая муфта | 1978 |
|
SU817355A2 |
| DE 10020946 A1, 15.11.2001 | |||
| US 5780945 A, 14.07.1998 | |||
| US 5808389 A, 15.09.1998. | |||

