Изобретение относится к железнодорожной автоматике и телемеханике и может быть использовано для оперативного измерения и контроля параметров напольных устройств железнодорожной автоматики и телемеханики, включая автоматическую локомотивную сигнализацию непрерывного действия (АЛСН), многозначную автоматическую локомотивную сигнализацию (АЛС-ЕН), систему автоматического управления торможением (САУТ), генераторы тональных рельсовых цепей (ТРЦ).
Известно устройство для измерения и контроля параметров устройств железнодорожной автоматики и телемеханики, содержащее средства для измерения и контроля параметров автоматической локомотивной сигнализации непрерывного действия (АЛСН), размещенные на подвижном транспортном средстве и связанные с передними приемными катушками (А.Л. Бартновский и др. Измерения в электротехнических устройствах железнодорожного транспорта. М., Транспорт, 1980 г. С.373-375).
Недостатком известного устройства являются ограниченные функциональные возможности, поскольку оно измеряет только параметры АЛСН. Кроме того, известное устройство не позволяет установить соответствие между результатами измерений и точками (ординатами) рельсовой цепи, сравнение результатов измерений с допустимыми значениями параметров сигналов, запоминание результатов измерений и их визуальную индикацию.
В качестве прототипа заявляемого технического решения выбрано устройство для измерения и контроля параметров устройств железнодорожной автоматики и телемеханики (патент РФ на полезную модель №67052, МПК B61L 25/04, 2007 г.). Указанное устройство содержит передние и задние приемные катушки, механически связанные с подвижным транспортным средством и расположенные над рельсами соответственно перед первой колесной парой подвижного транспортного средства и сзади последней колесной пары подвижного транспортного средства; размещенные на подвижном транспортном средстве устройство для измерения параметров автоматической локомотивной сигнализации непрерывного действия (АЛСН), устройство для измерения параметров многозначной автоматической локомотивной сигнализации (АЛС-ЕН), устройство для измерения параметров системы автоматического управления торможением (САУТ), устройство для измерения параметров генераторов тональных рельсовых цепей (ТРЦ), устройство предварительной обработки и цифровой фильтрации, содержащее первый и второй блоки защиты и усиления, устройство управления, задания режимов измерения, хранения и отображения информации и синхронизатор и установленный на корпусе буксы и механически связанный с колесной парой подвижного транспортного средства датчик угла поворота колеса.
Недостатком указанного устройства является то, что в процессе движения транспортного средства неконтролируемым образом изменяется расстояние между приемными катушками и рельсами, что обуславливает, в свою очередь, соответствующее изменение величин сигналов АЛСН, АЛС-ЕН, ТРЦ и САУТ и, как следствие, приводит к снижению точности измерения параметров сигналов АЛСН, АЛС-ЕН, САУТ и параметров генераторов ТРЦ.
Задача, решаемая изобретением, - повышение точности измерения параметров устройств железнодорожной автоматики и телемеханики.
Указанная задача решается тем, что устройство для измерения и контроля параметров устройств железнодорожной автоматики и телемеханики, содержащее передние и задние приемные катушки, механически связанные с подвижным транспортным средством; размещенные на подвижном транспортном средстве устройство для измерения параметров автоматической локомотивной сигнализации непрерывного действия (АЛСН), устройство для измерения параметров многозначной автоматической локомотивной сигнализации (АЛС-ЕН), устройство для измерения параметров системы автоматического управления торможением (САУТ), устройство для измерения параметров генераторов тональных рельсовых цепей (ТРЦ), устройство предварительной обработки и цифровой фильтрации, содержащее первый и второй блоки защиты и усиления, устройство управления, задания режимов измерения, хранения и отображения информации и синхронизатор и установленный на корпусе буксы и механически связанный с колесной парой подвижного транспортного средства датчик угла поворота колеса, дополнительно снабжено первым, вторым, третьим и четвертым датчиками высоты, механически связанными с подвижным транспортным средством и расположенными с возможностью измерения высоты приемных катушек относительно рельсов, при этом первый и второй датчики высоты жестко связаны с передними приемными катушками, а третий и четвертый датчики высоты жестко связаны с задними приемными катушками; первый блок защиты и усиления выполнен в виде первого и второго регулируемых усилителей, первые входы которых подсоединены соответственно к выходам передних приемных катушек, и первого и второго функциональных преобразователей, входы которых подключены к выходам первого и второго датчиков высоты, а выходы соединены со вторыми входами первого и второго регулируемых усилителей; второй блок защиты и усиления выполнен в виде третьего и четвертого регулируемых усилителей, первые входы которых подсоединены соответственно к выходам задних приемных катушек, и третьего и четвертого функциональных преобразователей, входы которых подключены к выходам третьего и четвертого датчиков высоты, а выходы соединены со вторыми входами третьего и четвертого регулируемых усилителей.
В варианте технического решения подвижное транспортное средство выполнено в виде автомотрисы.
Изобретение иллюстрируется чертежом, где приведена функциональная схема заявляемого устройства.
Устройство для измерения и контроля параметров устройств железнодорожной автоматики и телемеханики включает последовательно соединенные передние приемные катушки 1 и 2 и последовательно соединенные задние приемные катушки 3 и 4, механически связанные с подвижным транспортным средством, например автомотрисой (не показано), при этом катушки 1 и 2 располагаются перед первой колесной парой подвижного транспортного средства, катушки 3 и 4 - сзади последней колесной пары подвижного транспортного средства, катушки 1 и 3 размещаются над одним рельсом, а катушки 2 и 4 - над другим рельсом;
механически связанные с подвижным транспортным средством и расположенные с возможностью измерения расстояния между катушками 1-4 и рельсами датчики высоты 5, 6, 7 и 8, при этом датчики 5 и 6 жестко связаны соответственно с передними катушками 1 и 2, а датчики 7 и 8 жестко связаны соответственно с задними катушками 3 и 4, и средства измерения и контроля параметров устройств железнодорожной автоматики и телемеханики, расположенные на упомянутом подвижном транспортном средстве. Указанные средства измерения и контроля включают устройство предварительной обработки и фильтрации 9, содержащее первый и второй блоки защиты и усиления 10 и 11, при этом блок 10 включает регулируемые усилители 12 и 13 и функциональные преобразователи 14 и 15, а блок 11 включает регулируемые усилители 16 и 17 и функциональные преобразователи 18 и 19, и блок фильтрации, коммутации и аналого-цифрового преобразования 20; устройство для измерения параметров АЛСН 21, устройство для измерения параметров АЛС-ЕН 22, устройство для измерения параметров генераторов ТРЦ 23, устройство для измерения параметров САУТ 24, устройство управления, задания режимов измерения, хранения и отображения информации 25, датчик угла поворота колеса 26, который установлен на корпусе буксы и соединен механически с торцом оси колесной пары подвижного транспортного средства, и синхронизатор 27.
Выходы приемных катушек 1 и 2 подсоединены к первым входам усилителей 12 и 13, вторые входы усилителей 12 и 13 связаны с выходами функциональных преобразователей 14 и 15, входы которых подключены соответственно к датчикам высоты 5 и 6. Выходы приемных катушек 3 и 4 подсоединены к первым входам усилителей 16 и 17, вторые входы усилителей 16 и 17 связаны с выходами функциональных преобразователей 18 и 19, входы которых подключены соответственно к датчикам высоты 7 и 8. Выходы усилителей 12, 13, 16 и 17 подключены соответственно к первому, второму, третьему и четвертому входам блока фильтрации, коммутации и аналого-цифрового преобразования 20, первый, второй, третий и четвертый выходы которого подсоединены соответственно к входам устройства для измерения параметров АЛСН 21, устройства для измерения параметров АЛС-ЕН 22, устройства для измерения параметров генераторов ТРЦ 23 и первому входу устройства для измерения параметров САУТ 24. Устройство управления, задания режимов измерения, хранения и отображения информации 25 соединено своим выходом с входом коммутации блока 20, первым, вторым, третьим и четвертым входом-выходом - с выходами-входами устройств 21, 22, 23 и 24 соответственно; пятым входом-выходом - с выходом-входом синхронизатора 27, вход которого подключен к выходу датчика угла поворота колеса 26. Выход датчика 26 также подключен ко второму входу устройства для измерения параметров САУТ 24.
Заявляемое устройство работает следующим образом. Сигнальный ток, протекающий по рельсам, наводит своим магнитным потоком э.д.с. в обмотках приемных катушек. Выходные сигналы приемных катушек 1, 2, 3 и 4 поступают на первые входы усилителей 12, 13, 16 и 17. Одновременно на входы функциональных преобразователей 14, 15, 18 и 19 поступают выходные сигналы датчиков высоты 5, 6, 7 и 8, измеряющих положение катушек 1-4 относительно рельсов. В соответствии с заранее заданной функцией преобразования, учитывающей нелинейность выходного сигнала катушек 1-4 в зависимости от их расстояния до рельсов, преобразователи 14, 15, 18 и 19 осуществляют соответствующую регулировку усиления усилителей 12, 13, 16 и 17, в результате чего выходные сигналы усилителей на зависят от расстояния между катушками 1-4 и рельсами.
С выхода усилителей 12, 13, 16 и 17 сигналы поступают в блок фильтрации, коммутации и аналого-цифрового преобразования 20, где производится коммутация сигналов (в зависимости от направления движения транспортного средства подключаются либо передние катушки 1 и 2, либо задние катушки 3 и 4), фильтрация сигналов, их частотное разделение и преобразование в цифровую форму. С выхода блока 20 сигналы в виде данных поступают в устройство для измерения параметров АЛСН 21, устройство для измерения параметров АЛС-ЕН 22, устройство для измерения параметров генераторов ТРЦ 23, устройство для измерения параметров САУТ 24, где производится измерение параметров, декодирование соответствующих сигналов и их сравнение с установленными граничными значениями. По каждому параметру задается верхнее и нижнее граничное значение. Если измеряемый параметр находится в интервале между граничными значениями, то возникающая ситуация является штатной, а если измеряемый параметр выходит за пределы указанных интервалов, то возникает нештатная ситуация.
Из устройств 21-24 результаты измерений и сравнений поступают в устройство 25, которое осуществляет задание режимов измерений, запоминает поступившую информацию, архивирует ее и отображает на дисплее для визуализации результатов измерений и сравнения. Информация, архивируемая в устройстве 25, используется для дальнейшего анализа и принятия решений об исправности устройств АЛСН, АЛС-ЕН, ТРЦ и САУТ.
Датчик угла поворота колеса 26 вырабатывает импульсы, число которых пропорционально пути, пройденному подвижным транспортным средством. Эти импульсы поступают в синхронизатор 27, где подсчитываются. Начальное значение в синхронизаторе 27, например ордината начала пути движения подвижного транспортного средства, задается в устройстве 25. Текущее число импульсов передается из синхронизатора 27 в устройство 25 и используется для «привязки» результатов измерений к ординате пройденного пути и сравнения. Из датчика угла поворота колеса 26 импульсы также поступают в блок измерения параметров САУТ 24.
Использование в заявляемом устройстве датчиков высоты, жестко связанных с приемными катушками и размещенных с возможностью измерения расстояния между приемными катушками и рельсами, и средств регулирования усиления выходных сигналов приемных катушек в зависимости от их расстояния до рельсов, выполненных в виде регулируемых усилителей и функциональных преобразователей, позволяет уменьшить погрешность измерения, существующую в устройстве-прототипе и обусловленную неопределенностью положения приемных катушек относительно рельсов и повысить точность измерения параметров устройств железнодорожной автоматики и телемеханики.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ УСТРОЙСТВ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2333859C1 |
| Измерительный комплекс для экспресс-контроля параметров приемных катушек автоматической локомотивной сигнализации | 2016 |
|
RU2627250C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| УСТРОЙСТВО ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА НА СТАНЦИИ | 2004 |
|
RU2277055C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ С АВТОНОМНЫМИ МОДУЛЯМИ | 2009 |
|
RU2398698C1 |
| Устройство для диагностики релейной локомотивной аппаратуры АЛСН | 2019 |
|
RU2725829C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Устройство для проверки автоматической локомотивной сигнализации с индуктивным каналом передачи информации | 2019 |
|
RU2735147C1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ СИГНАЛОВ И ПАРАМЕТРОВ КОДОВ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ НЕПРЕРЫВНОГО ДЕЙСТВИЯ (АЛСН) | 2006 |
|
RU2317589C1 |
Изобретение относится к железнодорожной автоматике и телемеханике и может быть использовано для оперативного измерения и контроля параметров напольных устройств железнодорожной автоматики. Устройство содержит автоматическую локомотивную сигнализацию непрерывного действия (АЛСН), многозначную автоматическую локомотивную сигнализацию (АЛС-ЕН), систему автоматического управления торможением (САУТ), генераторы тональных рельсовых цепей (ТРЦ), устройство для измерения намагниченности рельсов, устройство предварительной обработки и цифровой фильтрации и установленный на корпусе буксы и механически связанный с колесной парой подвижного транспортного средства датчик угла поворота колеса. Устройство снабжено первым, вторым, третьим и четвертым датчиками высоты, механически связанными с подвижным транспортным средством и расположенными с возможностью измерения высоты приемных катушек относительно рельсов, при этом первый и второй датчики высоты жестко связаны с передними приемными катушками, а третий и четвертый датчики высоты жестко связаны с задними приемными катушками. Использование изобретения повышает точность измерения параметров устройств железнодорожной автоматики и телемеханики. 1 з.п. ф-лы, 1 ил.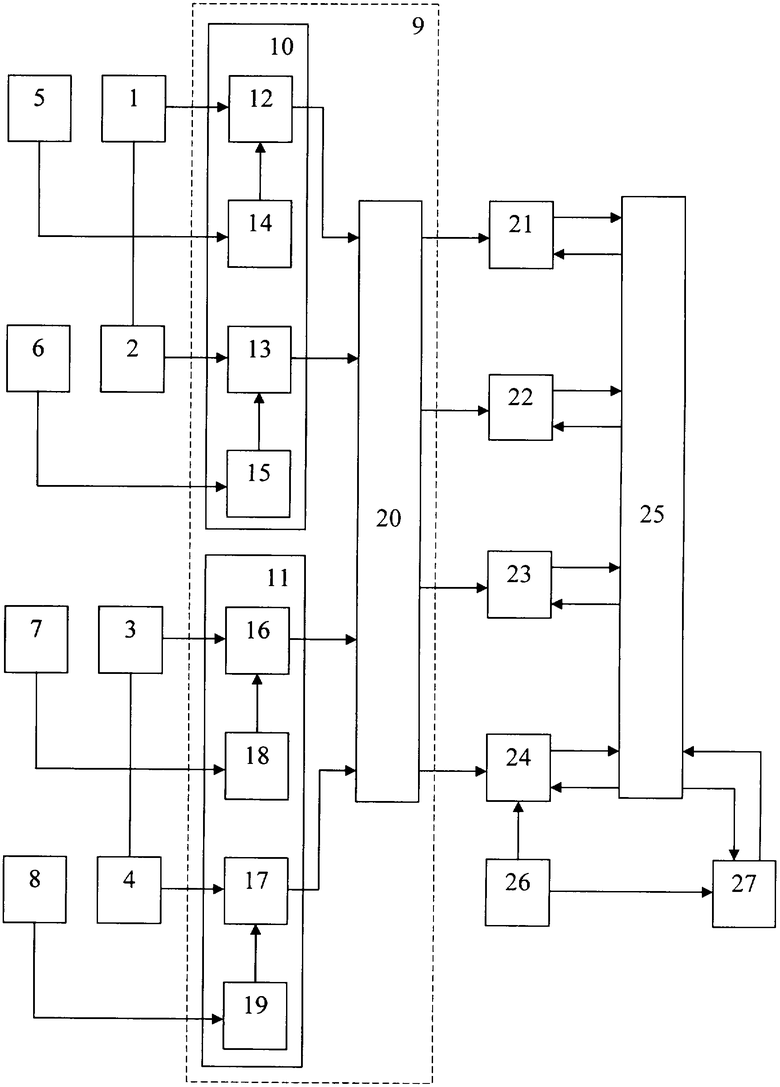
1. Устройство для измерения и контроля параметров устройств железнодорожной автоматики и телемеханики, содержащее передние и задние приемные катушки, механически связанные с подвижным транспортным средством; размещенные на подвижном транспортном средстве устройство для измерения параметров автоматической локомотивной сигнализации непрерывного действия (АЛСН), устройство для измерения параметров многозначной автоматической локомотивной сигнализации (АЛС-ЕН), устройство для измерения параметров системы автоматического управления торможением (САУТ), устройство для измерения параметров генераторов тональных рельсовых цепей (ТРЦ), устройство для измерения намагниченности рельсов, устройство предварительной обработки и цифровой фильтрации, содержащее первый и второй блоки защиты и усиления, устройство управления, задания режимов измерения, хранения и отображения информации и синхронизатор, и установленный на корпусе буксы и механически связанный с колесной парой подвижного транспортного средства датчик угла поворота колеса, отличающееся тем, что оно снабжено первым, вторым, третьим и четвертым датчиками высоты, механически связанными с подвижным транспортным средством и расположенными с возможностью измерения высоты приемных катушек относительно рельсов, при этом первый и второй датчики высоты жестко связаны с передними приемными катушками, а третий и четвертый датчики высоты жестко связаны с задними приемными катушками; первый блок защиты и усиления выполнен в виде первого и второго регулируемых усилителей, первые входы которых подсоединены, соответственно, к выходам передних приемных катушек, и первого и второго функциональных преобразователей, входы которых подключены к выходам первого и второго датчиков высоты, а выходы соединены со вторыми входами первого и второго регулируемых усилителей, второй блок защиты и усиления выполнен в виде третьего и четвертого регулируемых усилителей, первые входы которых подсоединены, соответственно, к выходам задних приемных катушек, и третьего и четвертого функциональных преобразователей, входы которых подключены к выходам третьего и четвертого датчиков высоты, а выходы соединены со вторыми входами третьего и четвертого регулируемых усилителей.
2. Устройство по п.1, отличающееся тем, что подвижное транспортное средство выполнено в виде автомотрисы.
| Приемник колебаний и звуков | 1941 |
|
SU67052A1 |
| US 6549005 B1, 15.04.2003 | |||
| Кювета для фотоэлектрических и т.п. колориметров | 1941 |
|
SU62368A1 |

